Способ относится к области обработки и отображения пространственной информации и может быть использован для локального повышения плотности имеющегося облака точек с использованием дополнительных наземных облаков точек. Способ автоматического локального повышения точности данных воздушного лазерного сканирования, используя данные наземного лазерного сканирования, может применяться для повышения детализации фасадов зданий и сооружений, объектов ландшафта, деревьев и прочих наземных объектов с геодезической привязкой.
Из существующего уровня техники известен способ «Автоматического 3D моделирования» [GB2457215A]. Данный способ предлагает автоматическое создание 3D моделей зданий и сооружений на основе данных воздушного лазерного сканирования. Недостаток данного способа – низкая детализация вертикальных элементов конструкций, таких, как стены, окна, заборы, деревья. Данные недостатки обусловлены физическим процессом технологии лазерного сканирования – съемка происходит под острым углом к поверхности и соответственно получается очень маленький угол падения, что не позволяет получить необходимую плотность точек.
Наиболее близким, является «Высокоточный метод регистрации наземных лидарных данных с ближней фотограмметрии» [CN103744086B]. Метод описывает наложение облака точек высокоточной ближней фотограмметрии на разряженное облако точек наземного лазерного сканирования. Недостатком является возможность применения только к небольшим объектам, которые можно отсканировать при помощи фотограмметрического сканера.
Таким образом, технической проблемой, на решение которой направлено изобретение, является локальное повышение точности необходимых объектов сканирования, которые недостаточно точно отображены на облаке точек низкого разрешения, полученного методом воздушного лазерного сканирования.
Решение указанной технической проблемы достигается тем, что облако точек в низком разрешении и обладающее геодезической привязкой, полученное методом воздушного лазерного сканирования, используется в качестве подложки для облаков точек, обладающих более высоким разрешением.
Технический результат – локальное повышение плотности и точности воздушного облака точек, с использованием наземного лазерного сканирования, ускорение привязки облака точек наземного сканирования в абсолютной системе координат. Особенно эффективно для вертикальных объектов.
На прилагаемых к описанию чертежах дано:
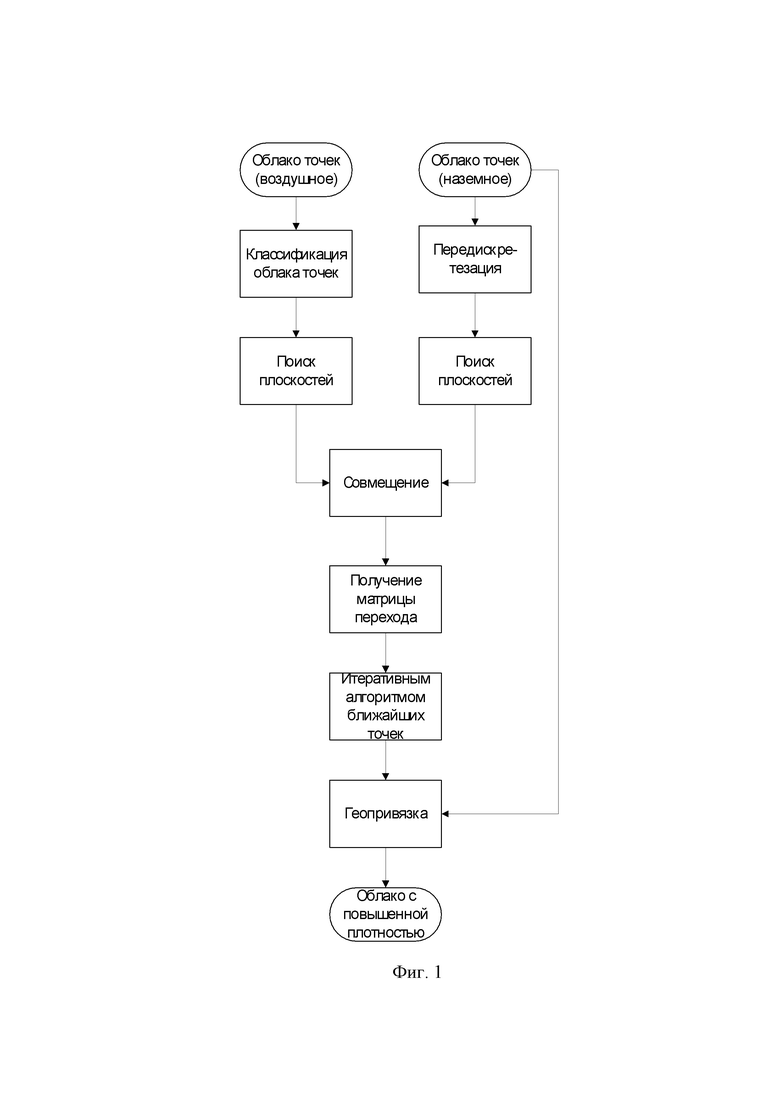
На фиг. 1 Показан алгоритм способа автоматического локального повышения точности данных воздушного лазерного сканирования, используя данные наземного лазерного сканирования
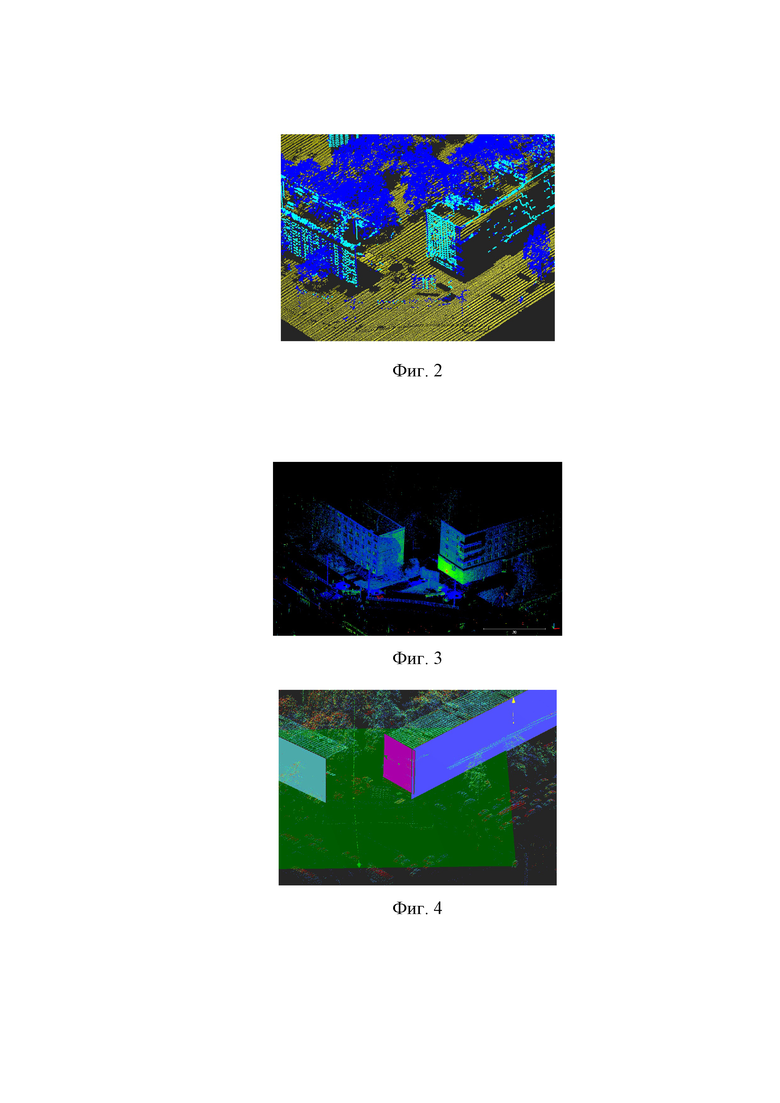
На фиг. 2. Показано исходное облако точек воздушного лазерного сканирования. Облако точек обладает низкой плотностью и не все интересующие плоскости видны, имеет геодезической привязкой.
На фиг. 3. Показано исходное облако наземного лазерного сканирования. Обладает высокой плотностью, не имеет геодезическую привязку.
На фиг. 4. Выделенные плоскости на исходном облаке точек воздушного лазерного сканирования. Выделены плоскости, необходимы для регистрации
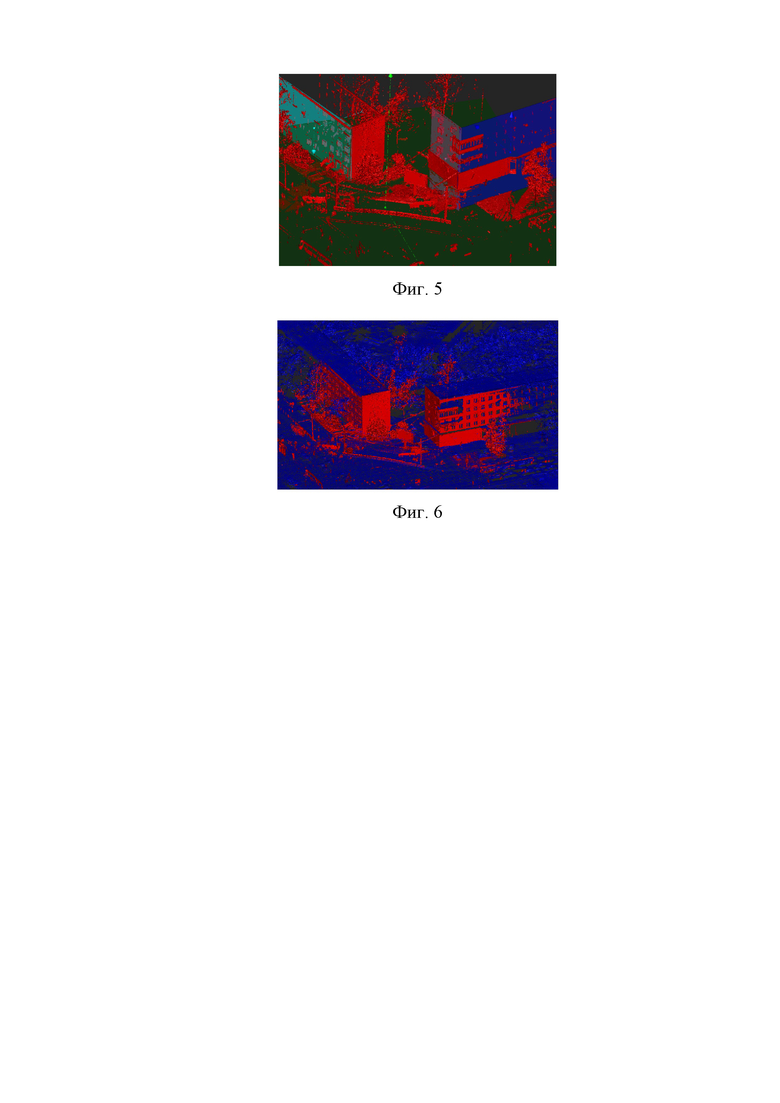
На фиг. 5. Выделенные плоскости на исходном облаке точек наземного лазерного сканирования. Выделены плоскости, необходимы для регистрации
На фиг. 6. Совмещенные облака точек (синим – воздушное, красным – наземные). Показан результат совмещения на основании совмещения облаков точек.
Способ осуществляется следующим образом: имеется исходное облако воздушного лазерного сканирования (фиг.2) с плотностью точек, приблизительно 1000 точек/м2, имеющее геодезическую привязку. В данном облаке точек, плохо детализованы многие вертикальные объекты. Так же имеется облако точек наземного лазерного сканирования (фиг.3), с плотностью точек 20 000 точек/м2, не имеющее геодезическую привязку. В данном облаке хорошо детализированы вертикальные объекты. Автоматическая сшивка обеспечивается за счёт регистрации облаков на основе совпадения плоскостей, с последующей оптимизацией итеративным алгоритмом ближайших точек.
Для ускорения работы способа, необходимо провести классификацию точек облака точек воздушного лазерного сканирования (классификация шумов, классификации поверхности земли, классификация низкой растительности, классификация средней растительности, классификация высокой растительности, крыши домов) известным способом. Для проведения классификации, необходим принять следующие исходные параметры: горизонт всегда в плоскости XY, ось Z всегда направлена вверх, все точки – не классифицированные. Сначала, производится классификация отдельно-стоящих точек со следующими параметрами: если в радиусе 0.5 метра от точки, менее 10 точек, точка классифицируется как отдельно-стоящая (шум). Затем производится классификация поверхности земли по алгоритму: выбирается нижняя точка, затем производится триангуляция Делоне с условием, что угол грани к горизонту не превышает 30 градусов, полученные точки классифицируются, как земля. Затем производится классификация низкой растительности по алгоритму: неклассифицированные точки на расстоянии от 0 до 0.4 метров от поверхности земли, полученные точки классифицируются, как низкая растительность. Затем производится классификация средней растительности по алгоритму: неклассифицированные точки на расстоянии от 0.4 до 1.2 метров от поверхности земли, полученные точки классифицируются, как средняя растительность. Затем производится классификация высокой растительности по алгоритму: неклассифицированные точки на расстоянии от 1.2 до бесконечности метров от поверхности земли, полученные точки классифицируются, как высокая растительность. Затем производится классификация крыш домов (горизонтальные и наклонные к горизонту плоскости, находящиеся выше уровня земли). В классе «высокая растительность» производится поиск плоскостей под углом не более чем 30 градусов к горизонту, полученные точки классифицируются, как крыши. В классе «земля», производится поиск плоскости, которая затем будет использоваться для поиска пересечений с другими плоскостями. На основе класса «Высокая растительность» в которую попадают вертикальные объекты высотой от 1.2 производится поиск плоскостей, перпендикулярных плоскости XY (с отклонением не более чем 5 градусов). Плоскости задаются в формате «центральная точка + нормаль» (фиг.4). Затем, производится поиск пересечения вертикальных плоскостей с горизонтальной плоскостью, по которым строятся отрезки, на основании которых вычисляется точка их пересечения. В случае невозможности нахождения точки пересечения плоскостей ввиду очень малого угла между ними, требуется ручное предварительное выравнивание.
В облаке наземного сканирования записывается изначальное положение и проводится передискретизация с радиусом поиска 500 мм., после чего, проводится поиск плоскостей, параллельных и перпендикулярных плоскости XY (с отклонением не более чем 5 градусов). (фиг.5). Затем, производится поиск 2-4 взаимно пересекающихся плоскостей, не лежащих в плоскости XY (при этом, любая из плоскостей пересекается с 1-2 другими плоскостями из выбранного набора, необходимо наличие как минимум 1 набора из 3 пересечений). Так как ось Z всегда смотрит наверх, система обладает 4 степенями свобод (перемещение по осям X,Y,Z, а так же, поворот вокруг оси Z). Затем, производится поиск пересекающихся плоскостей с плоскостью XY, и на пересечении плоскостей, производится построение линий. Находятся точки пересечения этих линий. В случае невозможности нахождения точки пересечения плоскостей ввиду очень малого угла между ними, требуется ручное предварительное выравнивание.
По известной точке, и углу поворота вокруг оси Z, рассчитывается матрица перехода. Затем, рассчитывается матрица перехода для облака точек наземного лазерного сканирования, его конечного положения и изначального положения.

где  ωX , ωY , ωZ – параметры перехода от первой системы ко второй;
ωX , ωY , ωZ – параметры перехода от первой системы ко второй;  – координаты начала первой системы относительно начала второй; ωX, ωY, ωZ (в радианной мере) – углы поворота осей системы для обеспечения их параллельности с осями системы Все точки исходного облака точек наземного сканирования умножаются на матрицу перехода. После предварительной регистрации, производится окончательное уравнивание методом итеративным алгоритмом ближайших точек и получается облако точек с повышенной локальной плотностью (фиг.6). При этом, облако точек наземного лазерного сканирования, становится геопривязанным в абсолютной системе координат.
– координаты начала первой системы относительно начала второй; ωX, ωY, ωZ (в радианной мере) – углы поворота осей системы для обеспечения их параллельности с осями системы Все точки исходного облака точек наземного сканирования умножаются на матрицу перехода. После предварительной регистрации, производится окончательное уравнивание методом итеративным алгоритмом ближайших точек и получается облако точек с повышенной локальной плотностью (фиг.6). При этом, облако точек наземного лазерного сканирования, становится геопривязанным в абсолютной системе координат.
Технический результат – Увеличена локальная плотность облака точек воздушного лазерного сканирования, за счёт использования данных наземного лазерного сканирования. Получено геопривязанное облако точек наземного лазерного сканирования, без необходимости создания геодезического хода.
Пример осуществления способа.
Производится классификация облака точек воздушного лазерного сканирования, для сокращения области поиска. Выделяется чистая земля, на которой производится поиск горизонтальной плоскости. Затем производится классификация низкой растительности, средней растительности, высокой растительнсти, крыш домов. В классе «высокая растительность» производится поиск плоскостей. Плоскости облака точек воздушного лазерного сканирования (фиг.4), имеют следующие характеристики (координаты заданы в системе координат МСК-1964), таблица 1.
Таблица 1. Координаты плоскости облака точек
Были найдены пересечения плоскостей 2,3 с плоскостью 4 (т.к. плоскости 1 и 3 почти параллельны). В области пересечения, они образовали отрезки:
(358417.3063;6641021.6025;8.5876) ; (358409.6750;6641039.6418;8.5876)
(358480.7101;6641055.5372;8. 5876) ; (358406.3711;6641024.1853;8.5876)
Пересекаются в точке (358414.7027;6641027.7569;8.5876)
Производится передискретезация облака точек наземного лазерного сканирования (фиг.5) с радиусом поиска 500мм. Далее производится поиск плоскостей. Получившиеся плоскости имеют следующие характеристики (координаты заданы в локальной системе координат), таблица 2.
Таблица 2. Координаты плоскости облака точек
Были найдены пересечения плоскостей 2,3 с плоскостью 4 (т.к. плоскости 1 и 3 почти параллельны). В области пересечения, они образовали отрезки:
(388.3792;415.9915;2.2976) ; (389.1246;361.4831;2.2976)
(383.0081;388.8052;2.2976) ; (398.4429;389.4509;2.2976)
Пересекаются в точке (388.7477;389.0453;2.2976)
Рассчитывается матрица перехода из локальной системы координат в систему координат МСК-1964 на основе точек пересечения.
dX = 358025,9550; dY = 6640638,7116; dZ = 6,2900; ωX = 0; ωY = 0; ωZ = 1,2123.
Данные параметры применяются для преобразования исходного облака точек наземного сканирования (фиг.5). После преобразования, выполняется окончательная регистрация известным методом итеративного алгоритма ближайших точек. (фиг.6).
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ проведения геотехнического мониторинга линейных сооружений и площадных объектов на основе воздушного лазерного сканирования | 2017 |
|
RU2655956C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ КОНТРОЛЬНОЙ ТОЧКИ ОБЪЕКТА С ПРИМЕНЕНИЕМ НАЗЕМНОГО ЛАЗЕРНОГО СКАНЕРА | 2013 |
|
RU2540939C2 |
| СПОСОБ ПОЛУЧЕНИЯ, ОБРАБОТКИ И ОТОБРАЖЕНИЯ ГЕОПРОСТРАНСТВЕННЫХ ДАННЫХ В ФОРМАТЕ 3D С ПРИМЕНЕНИЕМ ТЕХНОЛОГИИ ЛАЗЕРНОГО СКАНИРОВАНИЯ | 2015 |
|
RU2591173C1 |
| СПОСОБ И СИСТЕМА АВТОМАТИЧЕСКОГО ПОСТРОЕНИЯ ТРЕХМЕРНЫХ МОДЕЛЕЙ ГОРОДОВ | 2017 |
|
RU2638638C1 |
| Способ количественной оценки эрозионных потерь почвы с применением наземного лазерного сканера | 2018 |
|
RU2700930C1 |
| Способ передискретизации зарегистрированных облаков точек в полярных координатах без потери изначальной структуры | 2019 |
|
RU2736333C1 |
| СПОСОБ АВТОМАТИЗИРОВАННОГО СОЗДАНИЯ ТРЕХМЕРНЫХ СИСТЕМ ГОРОДСКИХ ПАНОРАМ НА ОСНОВЕ ДАННЫХ ЛАЗЕРНОГО СКАНИРОВАНИЯ | 2015 |
|
RU2601165C2 |
| СПОСОБ И СИСТЕМА РАСПОЗНАВАНИЯ ГОРОДСКИХ ОБЪЕКТОВ | 2015 |
|
RU2612571C1 |
| Способ геодезического мониторинга деформационного состояния земной поверхности в сейсмоопасных районах с применением технологии лазерного сканирования | 2018 |
|
RU2680978C1 |
| СПОСОБ ПОСТРОЕНИЯ КАРТЫ ЭКЗОГЕННЫХ ГЕОЛОГИЧЕСКИХ ПРОЦЕССОВ МЕСТНОСТИ ВДОЛЬ ТРАССЫ МАГИСТРАЛЬНОГО НЕФТЕПРОВОДА | 2015 |
|
RU2591875C1 |
Изобретение относится к области обработки и отображения пространственной информации. Способ осуществления воздушного лазерного сканирования реализуется с использованием данных наземного лазерного сканирования и состоит в предварительной обработке облаков точек воздушного и наземного лазерного сканирования, являющихся облаками точек с различными характеристиками. Способ применяется для городской застройки, при этом осуществляется предварительная классификация для сокращения набора точек для обработки. Также реализуется автоматическая сшивка, для чего производится поиск совпадающих плоскостей в качестве предварительного выравнивания, а окончательное выравнивание осуществляется с использованием итеративного алгоритма ближайших точек. Технический результат заключается в обеспечении возможности повышения плотности и точности воздушного облака точек и возможности ускорения привязки облака точек наземного сканирования в абсолютной системе координат, в особенности для вертикальных объектов. 6 ил., 2 табл.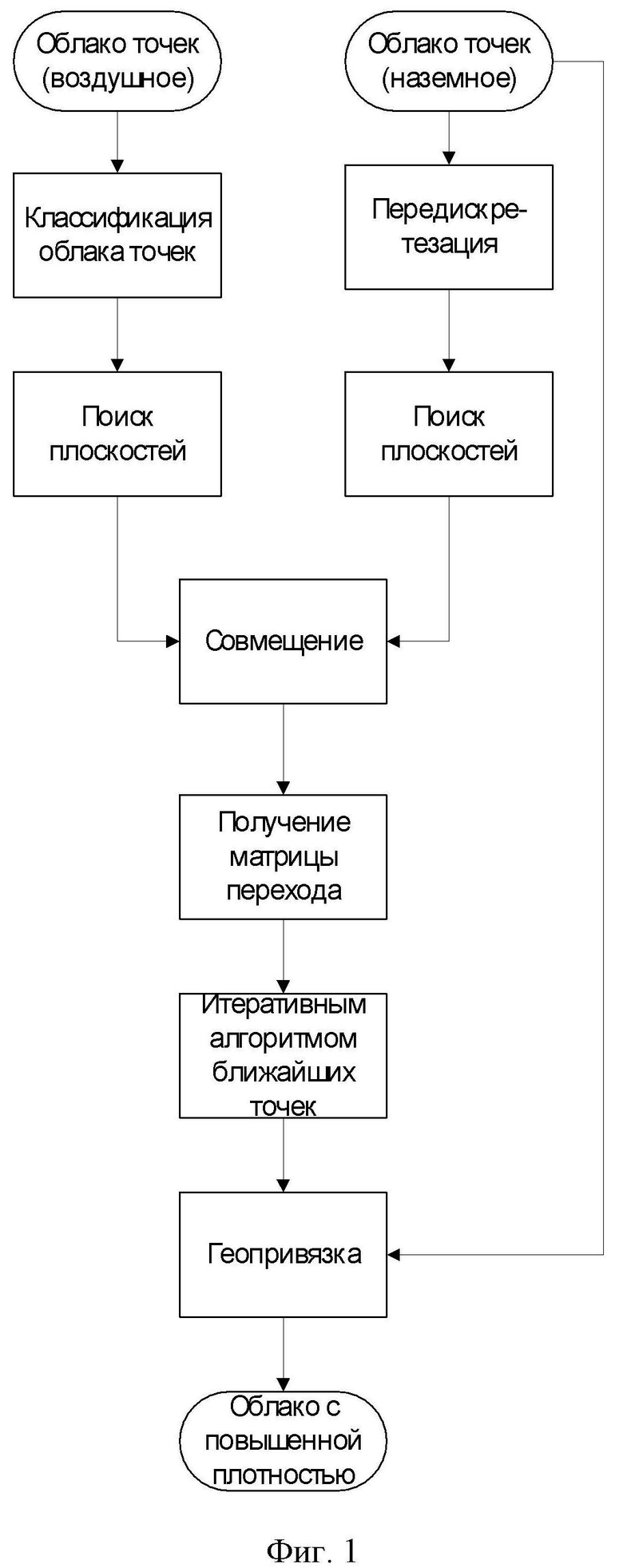
Способ осуществления воздушного лазерного сканирования, реализующийся с использованием данных наземного лазерного сканирования, состоящий в предварительной обработке облаков точек воздушного лазерного сканирования и наземного лазерного сканирования, являющихся облаками точек с различными характеристиками, отличающийся тем, что применяется для городской застройки, осуществляется предварительная классификация для сокращения набора точек для обработки, реализуется автоматическая сшивка, для чего производится поиск совпадающих плоскостей в качестве предварительного выравнивания, а окончательное выравнивание осуществляется с использованием итеративного алгоритма ближайших точек.
| CN 103744086 B, 02.03.2016 | |||
| CN 109945845 A, 28.06.2019 | |||
| СПОСОБ ФОРМИРОВАНИЯ ЦИФРОВОЙ МОДЕЛИ РЕЛЬЕФА И/ИЛИ ОРТОФОТОПЛАНА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2216711C1 |
| CN 106017873 B, 08.05.2018. | |||

