Гибридный дирижабль относится к летательным аппаратам легче воздуха и предназначен преимущественно для выполнения работ, связанных с прохождением траекторий, требующих резкого изменения направления движения с минимальными радиусами поворотов, а также высокоточного позиционирования и перемещения, например, монтажных, высотных, сельскохозяйственных работ, а также противопожарных, погрузо-разгрузочных, транспортных работ, осуществления связи, наблюдения и дозора.
Транспортные средства легче воздуха имеют большие габаритные размеры, что приводит к большим моментам инерции относительно основных осей летательного аппарата, при этом изменение вектора тяги двигателей силовой установки происходит преимущественно по величине, что, с учетом невысоких аэродинамических свойств транспортных средств легче воздуха, определяет их невысокие маневренные качества и низкую точность позиционирования.
Техническими решениями, обеспечивающими Улучшение маневренных свойств транспортных средств легче воздуха может быть достигнуто, например, с помощью технических решений, например, в области конструктивно - силовых и аэродинамических компоновок летательного аппарата, а также компоновок силовых установок обеспечивающих уменьшение преодолеваемых моментов инерции, возможность изменения вектора тяги двигателей силовой установки в круговом диапазоне, уменьшение парусности летательного аппарата.
Известен высокоманевренный дирижабль дискообразной формы (1). В качестве движителей силовой установки на аппарате использованы четыре поворотных воздушных сопла, расположенные симметрично по периферии силового диска. На аппарате установлен газотурбинный двигатель, поток выхлопных газов которого направляется по трубам к соплам, меняющим скорость и направление истечения газа. Дирижабль не имеет аэродинамических рулей и управляется с помощью изменения величины и направления векторов тяги воздушных сопел. Недостатком данной конструкции можно считать сложность процесса управления тягой сопла и ограниченные углы ее отклонения.
Известен дисковый полужесткий дирижабль (2). Для управления подъемной силой и перемещения в вертикальной плоскости дирижабль снабжен системой термобалластирования. Для выполнения горизонтального полета аппарат имеет двигатели с воздушными винтами, которые расположены на периферии силового кольца. Недостатком этого аппарата можно считать неэффективное управление полетом в горизонтальной плоскости, т.к. необходимо преодолевать момент инерции корпуса дирижабля при изменении направления движения, а также в вертикальной плоскости при использовании только системы термобалластирования.
Известно техническое решение (3), представляющее собой летательный аппарат балластного типа, состоящий из двух куполообразных оболочек с несущим газом, соединенных между собой жестким периферийным кольцом и центральной стойкой, заполненной газообразным балластом, на основании которой закреплена сменная платформа с блоком системы управления, соплами сброса газообразного балласта, датчиками прицеливания и контроля положения центра масс летательного аппарата. При этом агрегаты силовой установки расположены по контуру периферийного кольца и обеспечивают движение летательного аппарата в трех плоскостях. Таким образом, данная компоновка обеспечивает автономность проведения прецизионных погрузочно-разгрузочных работ, монтажных и транспортных работ, однако при маневрировании и изменении направления движения необходимо выполнить соответствующий разворот летательного аппарата и преодолеть момент инерции всего летательного аппарата относительно продольной оси центральной стойки.
Существует техническое решение, представляющее собой аэростатический комбинированный летательный аппарат, содержащий аэростатическую оболочку дискообразной формы, заполненную несущим газом и гондолу, представляющую собой самолет, жестко прикрепленный к оболочке посредством кольцевой трубчатой рамы (4). Взлет и маневры в горизонтальной плоскости производятся с помощью дополнительных двигателей с изменяемым вектором тяги, установленных на аэростатической оболочке. Движение в горизонтальной плоскости осуществляется с помощью маршевого двигателя самолета.
В данном техническом решении применена дискообразная оболочка, однако для маневра в горизонтальной плоскости применены дополнительные двигатели, прикрепленные к оболочке и при маневрировании и изменении направления движения необходимо выполнить соответствующий разворот и преодолеть момент инерции всего летательного аппарата относительно вертикальной оси.
Известен полужесткий аэростатический летательный аппарат линзообразной формы, состоящий из внешней мягкой оболочки, представляющей собой части эллипсоида с отношением высоты к диаметру 0,6, силового кольца треугольной формы, внутренних верхнего и нижнего силового кольца, конического такелажа, центрального силового кольца, шахты, гондолы, газовых оболочек, маршевых силовых установок, расположенных сверху и снизу внешнего силового кольца, подъемностабилизирующих установок (5). ЛА линзообразной формы имеет свойство повышенной маневренности. Недостатком данной компоновки является то, что при изменении направления движения необходимо преодолевать момент инерции всего ЛА относительно вертикальной оси.
Известен гибридный летательный аппарат, содержащий оболочку, двигатели с воздушными винтами, при этом оболочка выполнена в форме тора и имеет внутренний жесткий каркас, а в центральном отверстии тора перпендикулярно плоскости каркаса установлена Х - образная платформа с полезной нагрузкой и источником питания, причем по меньшей мере четыре электродвигателя с воздушными винтами закреплены на краях платформы, а при наличии двух оболочек, оболочки соединены балкой с растяжками, к которой прикреплена Х - образная платформа (6). Данная компоновка обеспечивает повышенную маневренность в вертикальной плоскости, кроме того, торообразная оболочка имеет свойство повышенной маневренности, однако при изменении направления движения необходимо выполнить поворот и преодолеть момент инерции всего летательного аппарата относительно продольной оси центральной стойки.
Наиболее близким по техническому решению и выбранному за прототип является гибридный летательный аппарат (7), состоящий из внешней, наполняемой легким газом оболочки, внешнего силового кольца, внутренних силовых колец, центрального силового кольца, силовой установки, содержащей четыре энергетических узла, каждый из которых включает двигатель с воздушным винтом, создающим вертикальную тягу, и двигатель с воздушным винтом, создающим горизонтальную тягу, и устройства, обеспечивающие управление общим шагом лопастей, перекос лопастей и реверс тяги каждого воздушного винта, при этом все энергетические узлы расположены по внешней окружности упомянутого кольца симметрично относительно его связанных осей X, Y, Z, а воздушные винты горизонтальной тяги силовой установки аппарата совместно с двигателями, обеспечивающими их вращение, имеют дополнительную возможность поворотов вектора тяги на угол 45° относительно направления продольной оси X аппарата, что позволяет создавать суммарный вектор тяги горизонтальных винтов в любом направлении горизонтальной плоскости X, Z. Данное решение имеет ряд недостатков, основными из которых являются: 1. Неполное использование мощности силовой установки при создании тяги в горизонтальной плоскости XOZ, по причине того, что при формировании суммарного вектора тяги могут быть просуммированы векторы тяги всех четырех двигателей только по осям X и Z в прямом и обратном направлении, с учетом реверса тяги, а в круговом диапазоне углов в горизонтальной плоскости XOZ могут быть просуммированы векторы тяги только двух двигателей, расположенных диаметрально противоположно относительно контура оболочки по оси, перпендикулярной заданному направлению вектора тяги.
2. Образование пикирующего момента при движении в горизонтальной плоскости, к которому приводит плечо силы равное расстоянию от оси тяги до плоскости центра давления, находящейся ниже оси тяги.
Задача предлагаемого изобретения заключается в создании аэростатического летательного аппарата, свободного от недостатков прототипа и позволяющего выполнять работы, требующие от ЛА высокой маневренности, точности позиционирования, например, монтажные, погрузо-разгрузочные, сельскохозяйственные и другие работы.
Техническим результатом изобретения является конструкция дирижабля, обладающая высокой маневренностью, возможностью точного позиционирования.
Технический результат достигается тем, что:
1. Вдоль вертикальной оси оболочки расположена центральная силовая балка, которая пересекает оболочку в верхнем и нижнем полюсах и подвижно соединена посредством осевых подвижных радиально-упорных опор и силовых колец с корпусом летательного аппарата в плоскости силовых колец миделевого сечения оболочки и полюсов оболочки, а на силовых кольцах установлены блокирующие тормоза, при этом двигатели горизонтальной тяги расположены над верхним полюсом оболочки и под нижним полюсом оболочки, прикреплены к центральной силовой балке и могут быть расположены симметрично относительно оси центральной силовой балки на траверсе, неподвижно прикрепленной к центральной силовой балке.
2. Двигатели горизонтальной тяги прикреплены к центральной силовой балке, которая пересекает оболочку в верхнем и нижнем полюсах и подвижно соединена посредством осевых радиально-упорных опор с элементами корпуса ЛА в плоскости силовых колец миделевого сечения оболочки и полюсов оболочки, а на силовых кольцах установлены блокирующие тормоза, при этом двигатели могут быть расположены симметрично относительно центральной оси балки на траверсе, неподвижно прикрепленной к балке.
3. Центральная силовая балка неподвижно соединена посредством осевых неподвижных радиально-упорных узлов крепления и силовых колец с корпусом летательного аппарата в плоскости силовых колец миделевого сечения оболочки и полюсов оболочки, при этом двигатели горизонтальной тяги могут быть расположены симметрично относительно оси центральной силовой балки на траверсе, подвижно прикрепленной к центральной силовой балке посредством осевых подвижных радиально-упорных опор с блокирующим тормозом.
Фиг. 1. Вид летательного аппарата спереди.
1 - Наружная оболочка; 2 - внешнее миделевое силовое кольцо; 3 - верхнее силовое кольцо; 4 - нижнее силовое кольцо; 5 - двигатели вертикальной тяги; 6 - верхний двигатель горизонтальной тяги; 7 - нижний двигатель горизонтальной тяги; 8 - центральная силовая балка; 9 - траверса; 10 - узел креплейия полезной нагрузки; 11 - приборный модуль; 12 - энергетический модуль; 13 - блок связи и навигации;
Фиг. 2. Вид А фиг. 1, нижний подвижный узел установки центральной силовой балки с неподвижной траверсой и подвесной системой.
1 - наружная оболочка; 7 - двигатели горизонтальной тяги; 8 - центральная силовая балка; 9 - траверса; 10 - узел крепления полезной нагрузки; 11 - приборный модуль; 12 - энергетический модуль; 13 - блок связи и навигации; 15 - арка нижнего обвода несущей оболочки; 23 - подвижная радиально - упорная опора на нижнем силовом кольце;4 - нижнее силовое кольцо;25 - блокирующий тормоз центральной балки на нижнем силовом кольце
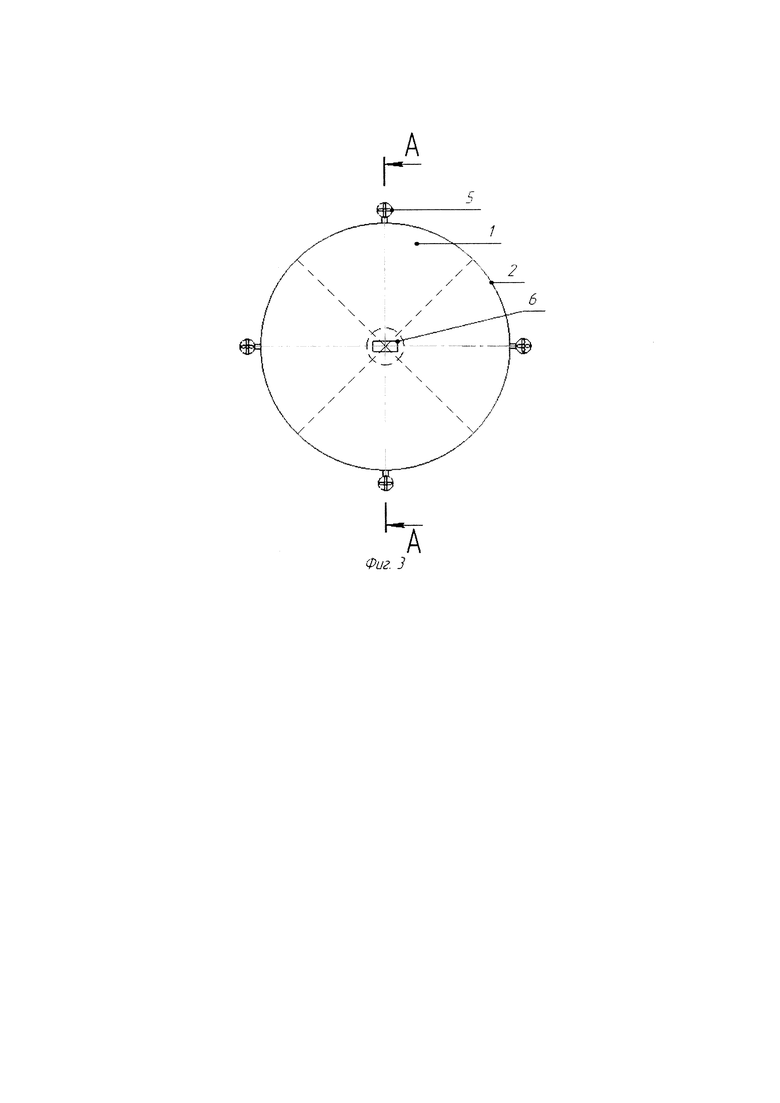
Фиг. 3. Вид летательного аппарата сверху.
1 - наружная оболочка; 2 - внешнее миделевое силовое кольцо; 5 - двигатели вертикальной тяги; 6 - верхний двигатель горизонтальной тяги.
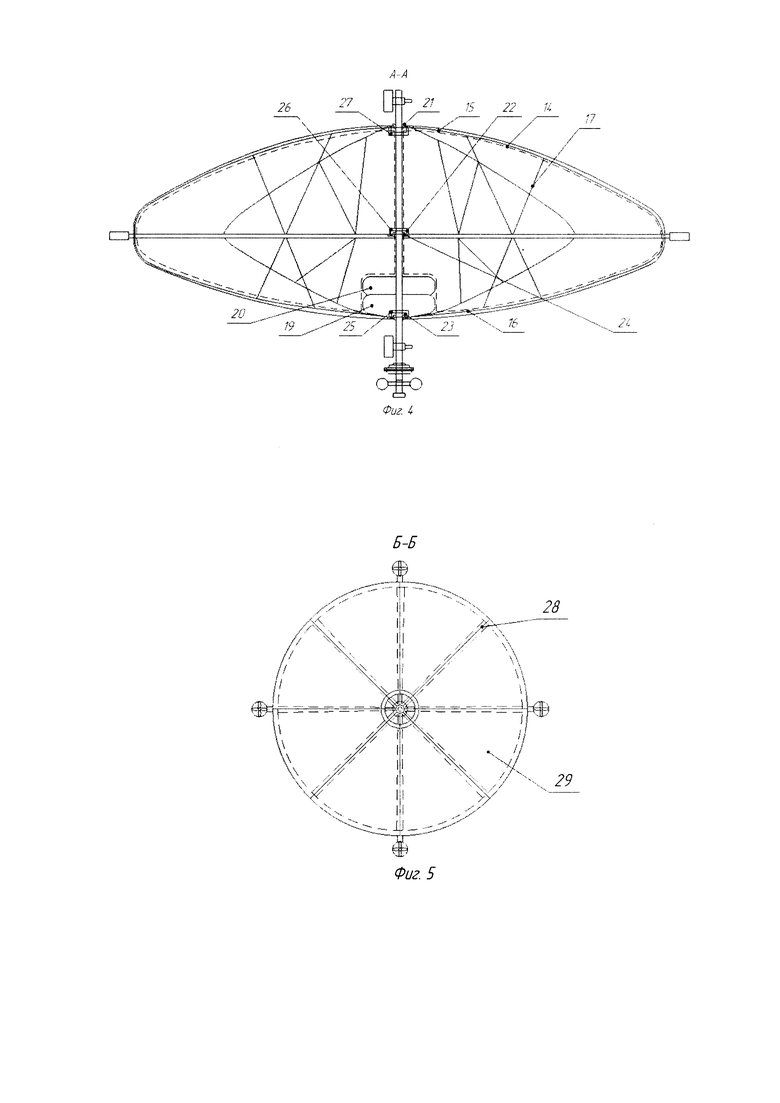
Фиг. 4. Разрез А - А фиг. 3.
14 - внутренняя оболочка (оболочка несущих баллонет);
15, 16 - арки верхнего и нижнего обводов несущей оболочки ЛА соответственно; 17 - подкосы; 19 - емкость для балласта; 20 - емкость для балласта; 21 - осевая подвижная радиально - упорная опора центральной балки на верхнем силовом кольце; 22 - осевая подвижная радиально - упорная опора центральной балки на силовом кольце миделевого сечения; 23 - осевая подвижная радиально - упорная опора центральной балки на нижнем силовом кольце; 24 - силовое кольцо миделевого сечения; 25 - блокирующий тормоз центральной балки нижнего силового кольца; 26 - блокирующий тормоз центральной балки на силовом кольце миделевого сечения; 27 - блокирующий тормоз центральной балки на верхнем силовом кольце.
Фиг. 5. Разрез Б - Б фиг. 1 корпуса оболочки в плоскости миделевого силового кольца.
28 - радиальная балка миделевого сечения; 29 - баллонеты с подъемным газом.
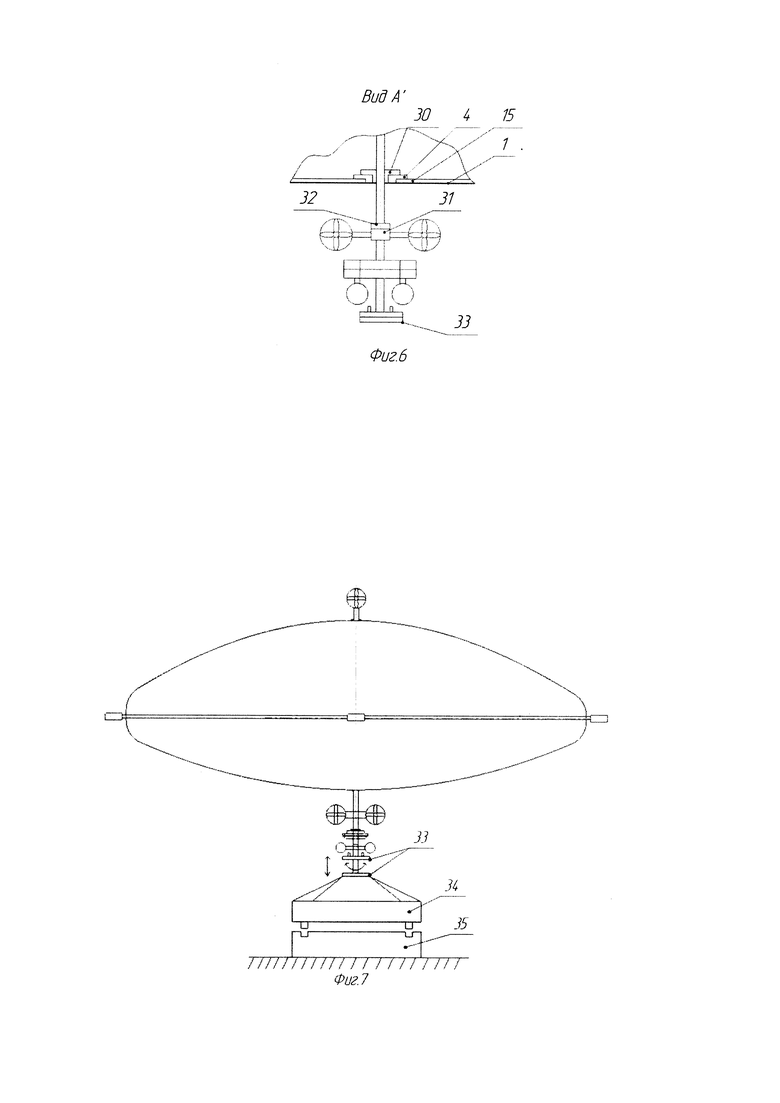
Фиг. 6. Вид А фиг. 1, нижний неподвижный узел установки центральной силовой балки с подвижной траверсой и подвесной системой.
1 - наружная оболочка; 15 - арка нижнего обвода несущей оболочки; 4 - нижнее силовое кольцо; 30 - неподвижная радиально - упорная опора нижнего силового кольца; 31 - осевая подвижная радиально - упорная опора;32 - блокирующий тормоз; 33 - узел крепления модуля полезной нагрузки с приводом подъема - опускания и поворота модуля полезной нагрузки.
Фиг. 7. Схема швартовки полезной нагрузки.
33 - узел крепления модуля полезной нагрузки с приводом подъема-опускания поворота модуля полезной нагрузки; 34 - полезная нагрузка; 35 - приемное устройство.
Дирижабль содержит наружную оболочку 1 (фиг. 1), имеющую вид тела вращения относительно вертикальной оси симметрии оболочки и охваченную по контуру миделевого горизонтального сечения силовым кольцом 2, на полюсах которой установлены верхний 3 и нижний 4 полюсные силовые кольца, при этом по контуру внешнего миделевого силового кольца 2 установлены двигатели вертикальной тяги 5, а над верхним и под нижним силовыми кольцами 3 и 4 соответственно расположены верхний двигатель горизонтальной тяги 6 и нижние двигатели горизонтальной тяги 7, которые прикреплены к центральной силовой балке 8 (фиг. 2), при этом нижние двигатели горизонтальной тяги 7 установлены симметрично относительно продольной оси центральной силовой балки 8 посредством траверсы 9, прикрепленной к балке 8, а к нижней части силовой балки прикреплен узел крепления полезной нагрузки 10, приборный модуль 11, энергетический модуль 12, блок связи и навигации 13. Двигатели вертикальной тяги 5 установлены по внешнему миделевому силовому кольцу с определенным угловым шагом (фиг. 3). Наружная оболочка 1 охватывает внутреннюю оболочку 14 (фиг. 4) и каркас, включающий в свой состав центральную силовую балку 8, в верхней, нижней и средней части которой установлены осевые радиально - упорные опоры 21, 22, 23, которые могут быть оснащены блокирующими тормозами 25, 26, 27, прикрепленные к верхнему 3 и нижнему 4 полюсным силовым кольцам и силовому кольцу миделевого сечения 24, на которые закреплены концы верхних 15 и нижних 16 арок обводов корпуса, соединяющихся на внешнем миделевом силовом кольце 2, соединенные также радиальными балками миделевого сечения 28 (фиг. 5) с центральной силовой балкой 8 посредством силового кольца миделевого сечения 24 и установленной на него осевой радиально - упорной опоры 22, при этом верхние 15 и нижние 16 арки обводов корпуса подкреплены подкосами 17 с опорой на радиальные балки миделевого сечения, при этом в пространстве, образованном плоскостями арок обводов, 15, 16, подкосами 17, радиальными балками миделевого сечения 28 расположены баллонеты 29 с подъемным газом, образованные оболочкой 14, а в нижней части каркаса установлены емкости 19, 20 для жидкого или газообразного балласта с системой наддува, закачки и сброса балласта. При этом в случае установки двигателей горизонтальной тяги 7 посредством жестко прикрепленной к центральной силовой балке 8 траверсы 9 осевые радиально - упорные опоры 21, 22, 23 выполняют подвижными относительно продольной оси центральной силовой балки и оснащают блокирующими тормозами 25, 26, 27, а в случае установки двигателей горизонтальной тяги 7 посредством траверсы 9, прикрепленной к центральной силовой балке 8 подвижно относительно ее продольной оси посредством установки осевой подвижной радиально - упорной опоры 31 с блокирующим тормозом 32, осевые радиально - упорные опоры 21, 22, 23 выполняют неподвижными относительно продольной оси центральной силовой балки и не оснащают блокирующими тормозами 25, 26, 27. При этом синхронизацию углов поворота двигателей 6, 7 осуществляют без их механической связи.
При швартовке полезной нагрузки может быть использован узел крепления с приводом подъема - опускания и поворота 33 (фиг. 7) модуля полезной нагрузки 34 для стыковки с приемным устройством 35.
Летательный аппарат работает следующим образом: после принятия и закрепления модуля полезной нагрузки 34 посредством узла крепления 10 или 33, установленного в нижней части центральной силовой балки 8, производят сброс балласта жидкого или газообразного из балластных цистерн 19, 20 на величину, равную весу полезной нагрузки, совершают подъем на высоту горизонтального движения с помощью подъемной силы двигателей вертикальной тяги 5, после чего ЛА совершает перемещение в горизонтальной плоскости в заданную точку, при этом изменение направления движения ЛА происходит путем создания разнотяга двигателей горизонтальной тяги 7, и поворота траверсы 9 относительно оси центральной силовой балки 8 корпуса ЛА на радиально - упорной опоре 31 или поворота центральной силовой балки 8 относительно корпуса ЛА в осевых подвижных опорах 21, 22, 23 с неподвижно закрепленной на ней траверсой 9. При этом направление вектора тяги двигателей горизонтальной тяги 7 может быть изменено в горизонтальной плоскости в угловом диапазоне 360° независимо от углового положения корпуса летательного аппарата, а при необходимости изменения углового положения корпуса летательного аппарата приводят в действие блокирующие тормоза 25 или 32, что обеспечивает передачу крутящего момента от тяги двигателей 7 через плечо траверсы 9 на центральную силовую балку и на корпус летательного аппарата посредством силовых колец 3, 4, 24. При достижении места назначения ЛА зависает над точкой разгрузки, опускается на необходимую высоту посредством создания отрицательной тяги двигателей вертикальной тяги 5, осуществляет фиксацию модуля полезной нагрузки 34 в узлах стыковки приемного устройства 35, осуществляет прием балласта жидкого или газообразного в балластные цистерны 19, 20 на величину веса полезной нагрузки или веса полезной нагрузки за вычетом отрицательной тяги двигателей вертикальной тяги 5 с последующим восполнением этой величины весом принятого балласта. При зависании, опускании, стыковке и фиксации модуля полезной нагрузки 34 в узлах стыковки приемного устройства 35 используют тяговые импульсы двигателей горизонтальной тяги 7 с управлением вектора тяги в горизонтальной плоскости в угловом диапазоне 360° для позиционирования вертикальной оси летательного аппарата и взаимной координации узла крепления 10 или 33 модуля полезной нагрузки 34 и реперных точек приемного устройства 35. Угловое положение модуля полезной нагрузки относительно корпуса ЛА может быть изменено посредством воздействия крутящего момента от центральной силовой балки 8 через узел крепления 10 модуля полезной нагрузки 34 или крутящего момента от подъемно - поворотного привода узла крепления 33 модуля полезной нагрузки 34.
Список используемой литературы
1. Патент Великобритании №2027403, кл. B7W 11А10, 1980 г.
2. Патент Великобритании №2117728, кл. В64В 1/02, 1983 г.
3. Патент 2 093 413 Российская федерация, МПК В64В 1/00 Система и способ воздушной транспортиров / В.П. Бурдаков; заявитель и патентообладатель Головное конструкторское бюро Научно - производственного объединения «Энергия» им. акад. СП. Королева. - №5008551/11, 30.07.1991; опубл. 20.10.1997.
4. Патент 2009073 Российская федерация, МПК В64В 1/00 Аэростатический комбинированный летательный аппарат / В.И. Бирюлев; заявитель и патентообладатель В.И. Бирюлев - №4791248/23, 19.12.1989; опубл. 15.03.1994. 2011.
5. Патент 105881 Российская федерация, МПК В64В 1/08 Гибридный дирижабль линзообразной формы / В.Н. Голубятников, С.Б. Пензин, В.И. Кожевин, А.Ю. Калмыков, А.С. Долгодворов; заявитель и патентообладатель ФГУП «Долгопрудненское конструкторское бюро автоматики» - №2010147271/11, 19.11.2010; опубл. 27.06.2011.
6. Патент 2651305 Российская федерация, МПК В64В 1/30 Гибридный летательный аппарат / В.М. Бородуля, В.М. Вишневский; заявитель и патентообладатель ФГБУ науки Институт проблем управления им. В.А. Трапезникова РАН - №2016148412, 09.12.2016.
7. Патент 2 46027 Российская федерация, МПК В64В 1/32, В64С 39/06, В64С 15/00 Гибридный дирижабль линзообразной формы / В.Н. Голубятников, С.Б. Пензин, О.А. Козлов; заявитель и патентообладатель ФГУП «Долгопрудненское конструкторское бюро автоматики» - №2012134266/11, 10.08.2012; опубл.20.02.2014.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИБРИДНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2016 |
|
RU2651305C1 |
| Дирижабль для междугородних авиаперевозок различной дальности | 2021 |
|
RU2798583C1 |
| ПОЖАРНЫЙ ДИРИЖАБЛЬ | 2003 |
|
RU2250122C1 |
| КОМБИНИРОВАННЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ ЛЕГЧЕ ВОЗДУХА (ВАРИАНТЫ) | 2006 |
|
RU2318697C2 |
| УПРАВЛЯЕМЫЙ АЭРОСТАТИЧЕСКИЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ-КРАН | 1995 |
|
RU2098318C1 |
| ТРАНСПОРТНЫЙ ГИБРИДНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2008 |
|
RU2385257C1 |
| ДИРИЖАБЛЬ-ТРАНСФОРМЕР И СПОСОБ ЕГО ИСПОЛЬЗОВАНИЯ В КАЧЕСТВЕ ХРАМА И КОНЦЕРТНОГО ЗАЛА | 2020 |
|
RU2746962C1 |
| Способ лечения двустороннего перекрёстного прикуса у пациентов с сужением верхней челюсти | 2018 |
|
RU2699532C1 |
| ГИБРИДНЫЙ ДИРИЖАБЛЬ ЛИНЗООБРАЗНОЙ ФОРМЫ | 2012 |
|
RU2546027C2 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ АВАРИЙНО-СПАСАТЕЛЬНЫЙ | 2007 |
|
RU2337855C1 |

Изобретение относится к области воздухоплавательной техники. Гибридный дирижабль содержит оболочку, наполненную несущим газом, имеющую вид тела вращения относительно вертикальной оси оболочки, силовые кольца полюсов оболочки, имеющие механическую связь, силовое кольцо миделевого сечения, двигатели вертикальной тяги, расположенные на силовом кольце миделевого сечения оболочки с равным угловым шагом, двигатели горизонтальной тяги с изменяемым вектором тяги в горизонтальной плоскости. При этом вдоль вертикальной оси оболочки расположена центральная силовая балка, которая пересекает оболочку в верхнем и нижнем полюсах и подвижно соединена посредством осевых подвижных радиально-упорных опор и силовых колец с корпусом гибридного дирижабля в плоскости силовых колец миделевого сечения оболочки и полюсов оболочки. На силовых кольцах установлены блокирующие тормоза. При этом двигатели горизонтальной тяги расположены над верхним полюсом оболочки и под нижним полюсом оболочки, прикреплены к центральной силовой балке и могут быть расположены симметрично относительно оси центральной силовой балки на траверсе, неподвижно прикрепленной к центральной силовой балке, к нижней части которой прикреплены быстросъемные модули бортовых систем и узел крепления модуля полезной нагрузки. Техническим результатом изобретения является конструкция дирижабля, обладающая высокой маневренностью и возможностью точного позиционирования. 1 з.п. ф-лы, 7 ил.
1. Гибридный дирижабль, содержащий оболочку, наполненную несущим газом, имеющую вид тела вращения относительно вертикальной оси оболочки, силовые кольца полюсов оболочки, имеющие механическую связь, силовое кольцо миделевого сечения, двигатели вертикальной тяги, расположенные на силовом кольце миделевого сечения оболочки с равным угловым шагом, двигатели горизонтальной тяги с изменяемым вектором тяги в горизонтальной плоскости, отличающийся тем, что вдоль вертикальной оси оболочки расположена центральная силовая балка, которая пересекает оболочку в верхнем и нижнем полюсах и подвижно соединена посредством осевых подвижных радиально-упорных опор и силовых колец с корпусом гибридного дирижабля в плоскости силовых колец миделевого сечения оболочки и полюсов оболочки, а на силовых кольцах установлены блокирующие тормоза, при этом двигатели горизонтальной тяги расположены над верхним полюсом оболочки и под нижним полюсом оболочки, прикреплены к центральной силовой балке и могут быть расположены симметрично относительно оси центральной силовой балки на траверсе, неподвижно прикрепленной к центральной силовой балке, к нижней части которой прикреплены быстросъемные модули бортовых систем и узел крепления модуля полезной нагрузки.
2. Гибридный дирижабль по п. 1, отличающийся тем, что центральная силовая балка неподвижно соединена посредством осевых неподвижных радиально-упорных узлов крепления и силовых колец с корпусом гибридного дирижабля в плоскости силовых колец миделевого сечения оболочки и полюсов оболочки, при этом двигатели горизонтальной тяги могут быть расположены симметрично относительно оси центральной силовой балки на траверсе, подвижно прикрепленной к центральной силовой балке посредством осевых подвижных радиально-упорных опор с блокирующим тормозом.
| WO 2018139982 A1, 02.08.2018 | |||
| ГИБРИДНЫЙ ДИРИЖАБЛЬ ЛИНЗООБРАЗНОЙ ФОРМЫ | 2012 |
|
RU2546027C2 |
| US 2020283170 A1, 10.09.2020 | |||
| US 2023339629 A1, 26.10.2023 | |||
| УЧЕБНЫЙ ПРИБОР ПО АЛГЕБРЕ | 0 |
|
SU200915A1 |

