Изобретение относится к технике для укладки дорожного покрытия и автоматическому управлению процессом уплотнения дорожного покрытия. И может быть использовано в области дорожного-строительства.
Известна система автоматического управления положением выглаживающей плиты асфальтоукладчика, содержащая датчик углового положения, датчик высотного положения, блок управления и гидравлические приводы, в датчике высотного положения применен емкостной чувствительный элемент, а органы управления размещены на датчиках (полезная модель РФ №6567, дата приоритета 21.05.1997, дата публикации 16.05.1998, авторы: Беззуб А.И. и др., RU, прототип). Недостатком известной системы является низкая ее эффективность, так как ограничены пределы автоматического управления асфальтоукладчика, и система не приспособлена контролировать температуру укладываемого слоя и изменять режимы работы асфальтоукладчика.
Также, известна автоматического управления рабочего органа асфальтоукладчика, содержащая датчик углового положения, датчик высотного положения, тензометрический преобразователь, блок управления и гидравлические приводы (полезная модель РФ №95688, дата приоритета 24.02.2010, дата публикации 10.07.2010, авторы: Климов А.С. и др., RU, прототип). Недостатком является низкая эффективность системы автоматического управления, обусловленная тем, что при уплотнении асфальтобетонной смеси машинисту-оператору, необходимо выполнять большое количество операций для обеспечения качественного дорожного покрытия, кроме того, система не приспособлена использовать датчик ускорения вибрационной плиты с блоком спектрального преобразования для получения входных данных нейросетевого анализатора уплотнения, прогнозирующего значение коэффициента уплотнения дорожных материалов, нейросетевое управляющее устройство автоматически изменяющее с помощью исполнительных механизмов режимные параметры рабочего органа асфальтоукладчика - частоту трамбующего бруса и частоту вибрационной плиты, для получения заданного коэффициента уплотнения, что приводит к длительному процессу уплотнения дорожного покрытия и снижению производительности дорожно-строительных работ.
Технический результат заключается в повышении эффективности автоматического управления асфальтоукладчиком, в увеличении производительности и эффективности дорожно-строительных работ.
Для его достижения автоматическое управление процессом уплотнения осуществляют непрерывно, за счет акселерометра установленного на вибрационной плите рабочего органа, спектрального преобразователя для анализа спектров ускорения вибрационной плиты, датчика скорости асфальтоукладчика, анализатора уплотнения на основе искусственной нейронной сети прогнозирующий коэффициент уплотнения дорожных материалов, управляющего устройства на основе искусственной нейронной сети, автоматически изменяющего режимные параметры - частоту трамбующего бруса и частоту вибрационной плиты, через гидравлические приводы без непосредственного участия в управлении процессом уплотнения машиниста-оператора.
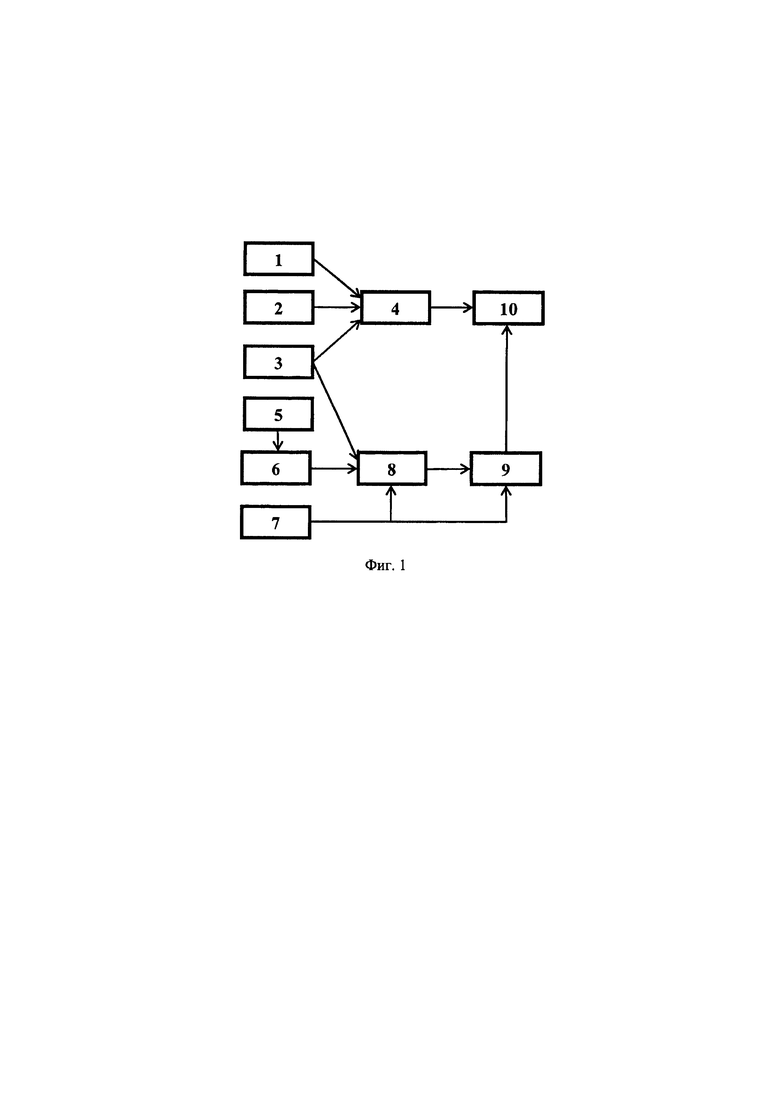
Нейросетевая система автоматического управления уплотнением дорожных материалов асфальтоукладчиками поясняется чертежом, фиг. 1. На чертеже приведена функциональная схема нейросетевой системы автоматического управления уплотнением дорожных материалов асфальтоукладчиками.
Система состоит из датчика углового положения 1, имеющий индикатор ошибки и переключатели задатчика стабилизируемого угла; датчика высотного положения 2 с индикатором ошибки; тензометрического преобразователя 3; блока управления 4; акселерометра 5; блока спектрального анализа 6 сигналов ускорения; датчика скорости асфальтоукладчика 7; блока анализатора уплотнения на основе искусственной нейронной сети 8, блока управляющего устройства на основе искусственной нейронной сети 9; дискретных гидравлических приводов 10.
Нейросетевая система автоматического управления уплотнением дорожных материалов асфальтоукладчиками работает следующим образом: датчик углового положения 1 вырабатывает сигнал ошибки, пропорциональный величине отклонения рабочего органа асфальтоукладчика от гравитационной вертикали. Сигнал ошибки поступает с выхода датчика углового положения 1 на первый вход блока управления 4. Датчик высотного положения 2 вырабатывает сигнал ошибки, пропорциональный величине отклонения рабочего органа от положения, заданного копиром. Сигнал ошибки поступает с выхода датчика высотного положения 2 на второй вход блока управления 4. Тензометрический преобразователь 3 вырабатывает сигнал, пропорциональный усилию в металлоконструкции трамбующего бруса, который поступает с выхода тензометрического преобразователя 3 на третий вход блока управления 4 и вход блока анализатора уплотнения 8. Акселерометр 5 преобразует колебания вибрационной плиты в выходной сигнал, который поступает на вход блока спектрального преобразователя 6. Блок управления 4 вырабатывает сигналы управления дискретными гидравлическими приводами 10 для сведения текущих ошибок к нулю. Длительность и частота управляющих сигналов зависит от величины ошибки. Блок анализатора уплотнения 8 на основе выходных сигналов с тензометрического датчика 3, акселерометра 5 после спектрального преобразования Фурье в блоке 6, сигнала датчика скорости 7, определяет текущее значение коэффициента уплотнения дорожных материалов. Блок управляющего устройства на основе искусственной нейронной сети 9 получает на вход выходной сигнал блока анализатора уплотнения 8, датчик скорости 7, и определяет оптимальные режимные параметры уплотняющего рабочего органа асфальтоукладчика - частоту трамбующего бруса, частоту вибрационной плиты, для автоматического их изменения за счет использования дискретных гидравлических приводов 10.
Преимущество заявляемого технического решения заключается в повышении эффективности автоматического управления асфальтоукладчиком вследствие непрерывного процесса уплотнения, за счет применения акселерометра установленного на вибрационной плите рабочего органа, спектрального преобразователя для анализа спектров ускорения вибрационной плиты, контроллер анализатора уплотнения на основе искусственной нейронной сети, прогнозирующего коэффициент уплотнения дорожных материалов, контроллера управляющего устройства на основе искусственной нейронной сети, автоматически изменяющего режимные параметры - частоту трамбующего бруса и частоту вибрационной плиты, через гидравлические приводы, без непосредственного участия в управлении процессом уплотнения машиниста-оператора, что в целом свидетельствует об увеличении производительности и эффективности дорожно-строительных работ.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЦИФРОВАЯ АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ ПРОЦЕССОМ УПЛОТНЕНИЯ АСФАЛЬТОБЕТОННОЙ СМЕСИ | 2012 |
|
RU2499095C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ И УПРАВЛЕНИЯ ПАРАМЕТРАМИ РАБОЧЕГО РЕЖИМА СТРОИТЕЛЬНО-ДОРОЖНЫХ МАШИН С ГИДРОСИСТЕМОЙ | 1992 |
|
RU2049844C1 |
| Асфальтоукладчик | 1986 |
|
SU1413172A1 |
| УПЛОТНЯЮЩИЙ РАБОЧИЙ ОРГАН АСФАЛЬТОУКЛАДЧИКА | 1995 |
|
RU2078869C1 |
| СПОСОБ ЭКСПЛУАТАЦИИ ТРАНСПОРТНОЙ МАГИСТРАЛИ МЕГАПОЛИСА | 1998 |
|
RU2140479C1 |
| УКЛАДЧИК ДОРОЖНО-СТРОИТЕЛЬНЫХ МАТЕРИАЛОВ | 1993 |
|
RU2076167C1 |
| КОЛЬЦЕВАЯ МАГИСТРАЛЬ МЕГАПОЛИСА И СПОСОБ РЕКОНСТРУКЦИИ КОЛЬЦЕВОЙ МАГИСТРАЛИ МЕГАПОЛИСА | 1998 |
|
RU2135672C1 |
| АВТОМОБИЛЬНАЯ ДОРОГА И СПОСОБ ЭКСПЛУАТАЦИИ АВТОМОБИЛЬНОЙ ДОРОГИ С ЕЕ РЕМОНТОМ И РЕКОНСТРУКЦИЕЙ | 1998 |
|
RU2135671C1 |
| УПЛОТНЯЮЩЕЕ УСТРОЙСТВО АСФАЛЬТОУКЛАДЧИКА | 2014 |
|
RU2558568C1 |
| Способ спектральной вибродиагностики зарождающихся эксплуатационных дефектов элементов коробок передач транспортных средств | 2023 |
|
RU2834870C2 |
Изобретение относится к технике для укладки дорожного покрытия и автоматическому управлению процессом уплотнения дорожного покрытия и может быть использовано в области дорожного строительства. Технический результат заключается в улучшении автоматического управления асфальтоукладчиком, улучшении качества дорожного покрытия. Технический результат достигается тем, что в заявленном решении автоматическое управление процессом уплотнения осуществляют за счет акселерометра, установленного на вибрационной плите рабочего органа, спектрального преобразователя для анализа спектров ускорения вибрационной плиты, датчика скорости асфальтоукладчика, анализатора уплотнения на основе искусственной нейронной сети, прогнозирующего коэффициент уплотнения дорожных материалов, при этом контроллер управляющего устройства на основе искусственной нейронной сети автоматически изменяет режимные параметры - частоту колебаний трамбующего бруса и частоту вибрации вибрационной плиты через гидравлические приводы. 1 ил.
Нейросетевая система автоматического управления уплотнением дорожных материалов асфальтоукладчиками, содержащая датчик углового положения, имеющий индикатор ошибки и переключатели задатчика стабилизируемого угла, датчик высотного положения с индикатором ошибки, тензометрический преобразователь усилия в металлоконструкции трамбующего бруса, блок управления, дискретные гидравлические приводы, отличающаяся тем, что она дополнительно содержит акселерометр, установленный на вибрационной плите рабочего органа, спектральный преобразователь для анализа спектров ускорения вибрационной плиты, датчик скорости асфальтоукладчика, контроллер анализатора уплотнения на основе искусственной нейронной сети, прогнозирующий коэффициент уплотнения дорожных материалов, контроллер управляющего устройства на основе искусственной нейронной сети, автоматически изменяющий режимные параметры рабочего органа - частоту колебаний трамбующего бруса и частоту вибрации вибрационной плиты, через гидравлические приводы.
| VANLIEM NGUYEN et al.: "Vibration Analysis and Control of a Vibration Screed System for Asphalt Pavers", 2020, [найдено: 12.12.2022] Найдено в: |

