Изобретение относится к колесным транспортным средствам, преимущественно автомобилям повышенной и высокой проходимости, транспортно-технологическим машинам, включая легкие гусеничные машины, мобильные роботы. Конкретно - к дифференциальным механизмам распределения мощности (МРМ) - как к межколесным дифференциалам (между левым и правым соосными колесами), так и к межосным дифференциалам (между колесными мостами).
Наиболее распространенным МРМ является простой конический дифференциал (общеизвестен).
При всей своей востребованности эксплуатационные свойства простого дифференциала уже не удовлетворяют запросам потребителей и уровню развития трансмиссий автомобилей. Поиск способа преодолеть известные недостатки простого дифференциала привел к появлению множества конструкций МРМ как на основе зубчатых механизмов («самоблокирующиеся» дифференциалы), так и использующих иные принципы работы (вискомуфта и др.). Следует отметить, что каждая из альтернативных простому дифференциалу конструкций обладала своими недостатками, в связи с чем дифференциал так и остался наиболее распространенным типом МРМ, в котором сочетаются простота, отработанность конструкции, надежность, компактность, высокий к.п.д. собственно редукторной части.
В то же время в области транспортного машиностроения (в том числе в системах управления поворотом гусеничных машин с использованием фрикционных тормозных элементов) рассматриваются возможности реализации широтно-импульсного модулирования давления во фрикционных парах трения - ШИМД [К методу оценки частоты импульсного управления поворотом гусеничной машины / Бойков А.В., Григорьев А.П., Русинов Р.В. // Рабочие процессы в компрессорах и установках с ДВС: межвузовский сборник. - П.: Изд-во ЛПИ им. М.И. Калинина, 1987. - С. 73-78; RU 2123440 С1, МПК B60K 23/02, В60Т 13/68, 20.12.1998].
ШИМД, как показали теоретические и экспериментальные НИОКР, - эффективное средство улучшения маневренности наземного транспортного средства. Оно активно используется в автоматических коробках перемены передач зарубежных конструкций [Автоматические коробки передач / Харитонов С.А. - М.: ООО "Издательство Аристель", ООО "Издательство ACT", 2003. - 335 с., ил.], и специалисты признают перспективность этого направления.
Наиболее близким аналогом (прототипом) заявляемого изобретения, то есть совпадающим с ним по назначению и по общим существенным конструктивным признакам, является механизм распределения мощности в трансмиссии автомобиля, содержащий редукторную часть с двумя степенями свободы (кратко - «двухстепенной редуктор»), входное звено которого опосредованно связано с двигателем, а выходные звенья опосредованно (через полуоси) связаны с левым и правым ведущими колесами автомобиля, с планетарными зубчатыми рядами - нулевым, первым и вторым, а также содержащий тормозные элементы с возможностью дифференцированного тормозного воздействия на звенья редукторной части и электронную систему управления упомянутыми тормозными элементами, связанную с рулевым механизмом с возможностью поворота управляемых колес автомобиля [Dr. Claus Granzov. ZV Vector Drive - better driving dynamic sand diving Satety through Torque Vectoring II http://www.irs.kit.edu/download/131213_GC_Torque Vectoring_ZF_Handout.pdf. 13.12.2013].
В нем редукторная часть выполнена с простым коническим дифференциалом и двумя, слева и справа от упомянутого конического дифференциала, одинаковыми цилиндрическими трехзвенными планетарными зубчатыми рядами со ступенчатыми (т.е. соосными) сателлитами, при этом входное звено редукторной части (корпус конического дифференциала) соединено с солнцем малого венца указанного сателлита, больший венец последнего соединен, посредством другого солнца, с одной из полуосей и, далее, с одним (соответствующим - левым или правым) из ведущих колес автомобиля, а водило - с дисковыми подвижными элементами тормоза.
Прототип позволяет рациональнее аналога - простого дифференциала - реализовывать подводимую к ведущим колесам автомобиля мощность в соответствии с условиями движения.
Однако при этом появляется необходимость в дополнительных механических, гидравлических и электронных устройствах, неизбежное при этом ухудшение массогабаритных показателей и рост себестоимости. При этом конструкция при ее реализации «в металле» получается излишне габаритной по высоте (определяется прежде всего диаметром планетарных рядов и дисковых элементов управления), что особенно болезненно для заднеприводных автомобилей.
Улучшение технико-эксплуатационных (в приложении к гражданским автомобилям) или тактико-технических (в приложении к военным и специальным автомобилям) характеристик носит частичный (ограниченный) характер, оставляет резервы дальнейшего совершенствования устройства.
Задача, на решение которой направлено заявляемое изобретение, заключается в устранении указанных недостатков прототипа и, соответственно, в улучшении технико-эксплуатационных (в приложении к колесным шасси гражданских транспортных средств) или тактико-технических характеристик (в приложении к колесным шасси военных и специальных транспортных средств).
Решение поставленной задачи достигается тем, что в механизме распределения мощности в трансмиссии автомобиля, содержащем двухстепенную редукторную часть, входное звено которого опосредованно связано с двигателем, а выходные звенья опосредованно, например, через полуоси связаны с левым и правым ведущими колесами автомобиля, с планетарными зубчатыми рядами - нулевым, первым и вторым, причем нулевой, непосредственно связанный с упомянутым входным звеном, - с функцией простого дифференциала, а также содержащий тормозные элементы с возможностью дифференцированного тормозного воздействия на звенья редукторной части и электронную систему управления упомянутыми тормозными элементами, редукторная часть выполнена с четырьмя цилиндрическими трехзвенными планетарными зубчатыми рядами, включая дополнительный редукторный, при этом входное ее звено непосредственно соединено со звеньями двух планетарных рядов, а система управления тормозными элементами выполнена с возможностью широтно-импульсной модуляции давления во фрикционных контактных парах тормозных элементов.
Решение поставленной задачи достигается также за счет дополнительных конструктивных признаков (при сформулированной выше основной совокупности признаков), представляющих собой частные случаи заявляемого устройства:
- нулевой и дополнительный редукторный планетарные ряды могут быть выполнены с сателлитом из двух сцепленных зубчатых колес, входное звено соединено параллельно с эпициклом нулевого и солнцем дополнительного редукторного планетарных рядов, водило нулевого планетарного ряда соединено с одним ведущим колесом автомобиля, например левым, эпицикл нулевого планетарного ряда посредством сателлита из двух сцепленных зубчатых колес и солнца соединен, совместно с эпициклом первого и солнцем второго планетарных рядов, с другим, например правым, ведущим колесом автомобиля, солнце первого планетарного ряда совместно с эпициклом второго планетарного ряда связаны с первым тормозным элементом, водило второго планетарного ряда связано со вторым тормозным элементом, водило первого планетарного ряда объединено с эпициклом дополнительного редукторного планетарного ряда, а водило последнего установлено неподвижно, при этом кинематические параметры k1 и k2 соответственно первого и второго планетарных рядов отрицательны, а кинематические параметры k0 и kред соответственно нулевого и дополнительного редукторного планетарных рядов положительны и равны 2 (такой частный вариант устройства в сочетании основных и дополнительных признаков позволяет, во-первых, сделать нулевой планетарный ряд функциональным аналогом простого дифференциала - конического дифференциала; во-вторых, за счет применения простых планетарных механизмов, достичь максимальной технологичности конструкции; в-третьих, за счет введения дополнительного редукторного планетарного ряда, что является главной изобретательской идеей заявляемого изобретения, в сочетании с подбором параметров ki перечисленных планетарных рядов, минимизировать габариты механизма по высоте (за счет минимизации диаметрального габарита), при высокой компактности конструкции; в-четвертых, что является специфической особенностью именно этого частного случая устройства, сокращение до 50% числа планетарных рядов с сателлитами из сцепленных зубчатых колес);
- нулевой планетарный ряд может быть выполнен с сателлитами из двух сцепленных зубчатых колес, входное звено соединено параллельно с эпициклом нулевого и солнцем дополнительного редукторного планетарных рядов, водило нулевого планетарного ряда соединено с одним ведущим колесом автомобиля, например левым, солнца нулевого, первого и второго планетарных рядов объединены между собой и соединены с другим, например правым, ведущим колесом автомобиля, солнца первого, второго и дополнительного редукторного планетарных рядов объединены, эпицикл дополнительного редукторного планетарного ряда установлен неподвижно, а эпициклы первого и второго планетарных рядов связаны соответственно с первым и вторым тормозными элементами, при этом кинематические параметры k1 и k2 соответственно первого и второго планетарных рядов отрицательны, кинематический параметр k0 нулевого планетарного ряда равен 2, а кинематический параметр kред дополнительного редукторного планетарного ряда равен минус 2,5 (специфической особенностью этого частного случая устройства является то, что в нем достигнуты еще меньшие габариты по высоте (диаметральный габарит), а также явные технологические преимущества - уже всего один ряд с сателлитами со сцепленными зубчатыми колесам вместо одного, она более проста и удобнее в сборке/разборке);
- входное звено механизма может быть связано с двигателем через коническую передачу (это позволяет оптимизировать общую компоновку трансмиссии, а значит, и автомобиля в целом, а также максимально адаптировать заявляемое техническое решение к базовым условиям ее монтажа при реализации).
Среди известных устройств и способов не обнаружены такие, совокупность существенных признаков которых совпадала бы с заявленной (что свидетельствует о мировом уровне новизны технического предложения).
В то же время, как показано выше в изложении технического результата, именно за счет последней достигается новый технический результат в соответствии с поставленной задачей. Налицо причинно-следственная связь заявляемых новых конструктивных признаков и нового технического результата («сверхэффекта» в патентоведческой терминологии), причем не следующего явным образом для специалистов на достигнутом уровне развития техники, что свидетельствует об изобретательском уровне заявляемого технического решения.
Предлагаемые материальные средства и технологии (см. далее по тексту подробное описание устройства и функционирования механизма) для изготовления заявляемого устройства, очевидно, соответствуют текущему технологическому укладу (с учетом «выбега» на организацию производства), что свидетельствует о промышленной применимости заявляемого технического решения.
Таким образом, заявляемое техническое решение отвечает всем трем критериям патентоспособности согласно действующему патентному законодательству.
Заявляемое устройство механизма распределения мощности в трансмиссии автомобиля пояснено (на примере межколесного дифференциала) на чертежах:
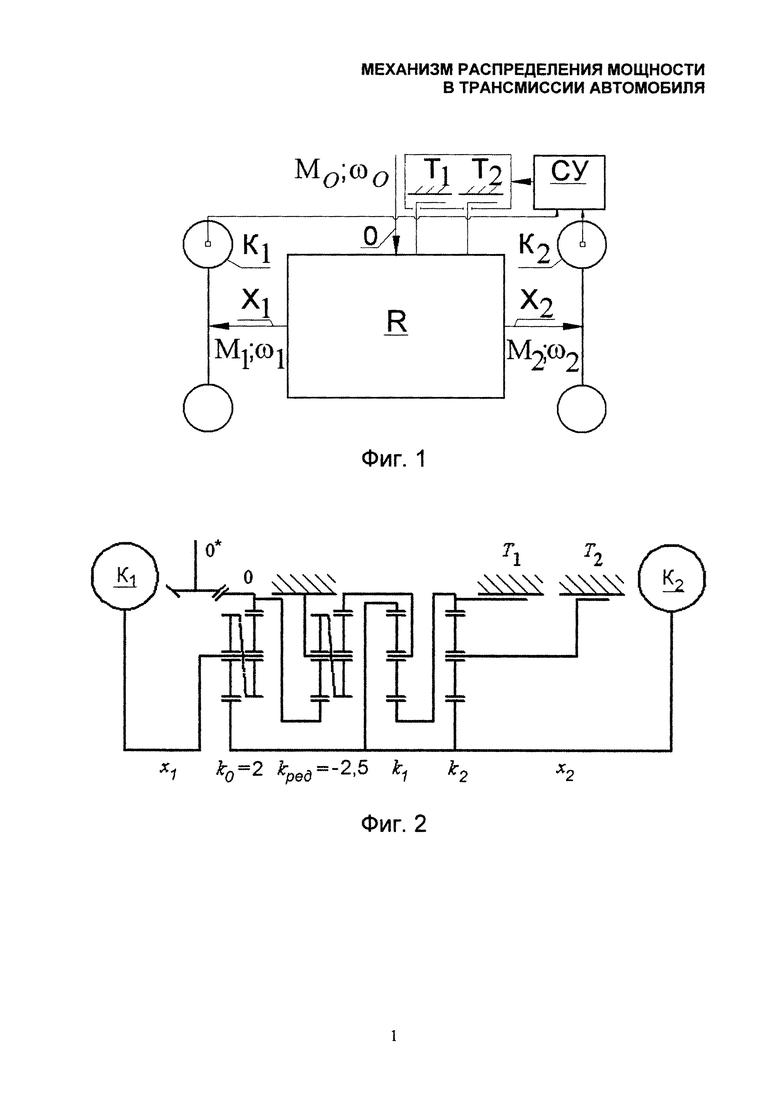
на фиг. 1 показана обобщенная блок-схема заявляемого устройства, где R - редукторная часть механизма распределения мощности (МРМ); T1, Т2 - тормоза определенных (см. далее частные случаи) звеньев редукторной части R; СУ - система управления упомянутыми тормозами; 0, Х1, Х2 - входное и выходные звенья R; M0, M1, М2 - крутящие моменты на звеньях 0, Х1, Х2 соответственно; ω0, ω1, ω2 - скорости вращения звеньев 0, Х1, Х2 соответственно; K1, K2 - ведущие колеса автомобиля;
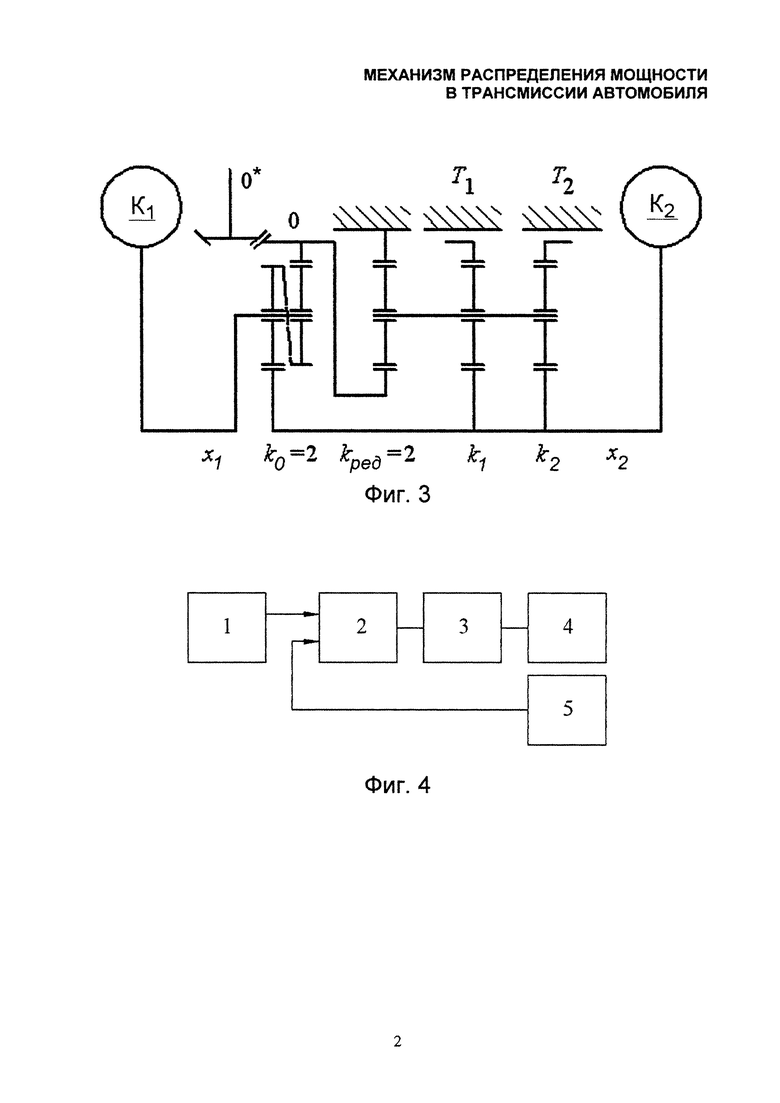
на фиг. 2 показана кинематическая схема первого (по порядку и по авторскому рейтингу) частного случая реализации заявляемого механизма распределения мощности (МРМ-4), где дополнительно введены обозначения: 0* - звено, предшествующее входному звену 0 и связанное непосредственно или опосредованно с двигателем; k0, k1, k2 - кинематические параметры «k» одноименных (нулевого «0», первого «1» и второго «2») планетарных зубчатых рядов редукторной части R; u - передаточное отношение;
на фиг. 3 - кинематическая схема второго (по порядку) частного случая реализации заявляемого механизма распределения мощности (МРМ-5), где обозначения аналогичны фиг. 2;
на фиг. 4 - блок-схема (состав, структура и принцип работы) следящей системы управления поворотом автомобиля, использующей широтно-импульсную модуляцию давления во фрикционных контактных парах тормозных элементов.
МРМ по любому из заявляемых частных случаев реализации конструктивного исполнения содержит (см. фиг. 1) редукторную часть R с двумя степенями свободы (кратко - «двухстепенной редуктор»). Входное звено 0 редукторной части R (а значит, и МРМ в целом) опосредованно связано с двигателем (не показано), а выходные звенья X1 и Х2 опосредованно (будет показано на фиг. 2 и 3), например, через полуоси автомобиля связаны с ведущими колесами K1, K2 автомобиля.
В составе МРМ предусмотрены тормозные элементы Т1, Т2 (тормоза, преимущественно дисковые) с возможностью дифференцированного тормозного воздействия на определенные (см. далее частные случаи) звенья редукторной части R, а также система управления СУ упомянутыми тормозами.
СУ реализует принципы электронного управления с использованием широтно-импульсной модуляции величины давления рабочей жидкости в бустерах тормозов (в гидросистеме) и, следовательно, в пятне контакта фрикционных поверхностей тормозных элементов (сдавливания дисков тормозов T1, Т2) - ШИМД.
СУ учитывает (получает) при этом сигналы с датчиков частоты вращения ведущих колес K1, K2 автомобиля, информацию о тягово-скоростном режиме работы двигателя и трансмиссии, положении органов управления (прежде всего, рулевого колеса в составе рулевого механизма в обеспечении поворота управляемых колес автомобиля) и др., что позволяет реализовать оптимальное в текущих условиях движения управляющее воздействие на редукторную часть R. Иначе говоря, объектами управления являются тормоза T1, Т2, причем с дифференцированно изменяемыми усилием и скважностью их срабатывания.
Далее, ближе к концу описания заявляемого устройства и его работы, будет дано развернутое описание соответственно устройства и работы СУ (с блок-схемой фиг. 4) в обоснование декларированной возможности реализации ШИМД.
Редукторная часть R представляет собой, в общем случае, зубчатый планетарный редуктор с двумя степенями свободы. Его шестерни выполняются, предпочтительно, косозубыми или шевронными.
Редукторная часть R выполнена, конкретно, с планетарными зубчатыми рядами - нулевым «0», дополнительным редукторным (дополнительный редуктор), доп., первым «1» и вторым «2», с одноименными кинематическими параметрами k0, kдоп, k1, k2. Входное звено 0 редукторной части R соединено в параллель со звеньями двух планетарных рядов: нулевой ряд «0», непосредственно связанный с упомянутым входным звеном 0, является аналогом простого дифференциала (аналогично прототипу с коническим дифференциалом), то есть несет функцию простого дифференциала.
В заявляемом устройстве по первому (рекомендуемому как одно из рациональных частных исполнений) конструктивному частному случаю (см. фиг. 2) первые два (нулевой и дополнительный редукторный) планетарных ряда выполнены с сателлитами с двумя сцепленными зубчатыми колесами (то есть «сцепленными», расположенными в одной плоскости - показано условно).
Входное звено 0 соединено параллельно с эпициклом нулевого и солнцем дополнительного редукторного планетарных рядов. Водило нулевого планетарного ряда соединено с одним ведущим колесом автомобиля, например левым K1. Эпицикл нулевого планетарного ряда, посредством «сцепленного» сателлита (с двумя сцепленными колесами) и солнца, соединен, совместно с эпициклом первого и солнцем второго планетарных рядов, с другим, например правым K2, ведущим колесом автомобиля. Солнце первого планетарного ряда совместно с эпициклом второго планетарного ряда связаны с первым тормозным элементом (тормозом) - T1. Водило второго планетарного ряда связано со вторым тормозным элементом (тормозом) - Т2. Точнее - с подвижной их частью (подвижными фрикционными дисками, то есть подвижными тормозными элементами). Водило первого планетарного ряда объединено с эпициклом дополнительного редукторного планетарного ряда, а водило последнего установлено неподвижно. При этом кинематические параметры k1 и k2 соответственно первого и второго планетарных рядов отрицательны (k1,2<0), а кинематический параметр kред нулевого планетарного ряда (аналогично нулевому ряду) положителен и равен двум (kред=2).
Проведенные авторами расчеты показали, что варьирование значения kред=2 в пределах 20% в обе стороны не дает выигрыша с точки зрения уменьшения угловых скоростей сателлитов МРМ, но несущественно с точки зрения проблемы ограничения дорожного просвета автомобиля.
Введение дополнительного редуктора требует корректировки передаточного отношения главной передачи при ее наличии в трансмиссии. Естественно, при этом возрастут обороты ведущего вала МРМ и несколько ухудшатся условия работы подшипников его сателлитов.
Изменение направления вращения выходных валов из-за применения внешнего зацепления потребуется учесть, изменив ориентацию ведомой шестерни главной передачи. Альтернатива видится в применении внутреннего зацепления во второй ступени (что увеличит стоимость изделия, но положительно скажется на к.п.д. редукторной части).
В заявляемом устройстве по второму (наиболее рациональному) конструктивному частному случаю (см. фиг. 3) нулевой планетарный ряд выполнен также со «сцепленными» сателлитами (с двумя сцепленными зубчатыми колесами). Входное звено 0 соединено параллельно с эпициклом нулевого и солнцем дополнительного редукторного планетарных рядов. Водило нулевого планетарного ряда соединено с одним ведущим колесом автомобиля, например левым K1. Солнца нулевого, первого и второго планетарных рядов объединены между собой и соединены с другим, например правым K2, ведущим колесом автомобиля. Солнца первого, второго и дополнительного редукторного планетарных рядов объединены. Эпицикл дополнительного редукторного планетарного ряда установлен неподвижно. Эпициклы первого и второго планетарных рядов связаны соответственно с первым T1 и вторым Т2 тормозными элементами (тормозами), точнее - с подвижной их частью (подвижными фрикционными дисками, то есть подвижными тормозными элементами). При этом кинематические параметры k1 и k2 соответственно первого и второго планетарных рядов отрицательны (k1,2<0), кинематический параметр k0 нулевого планетарного ряда равен двум (k0=2), а кинематический параметр kред дополнительного редукторного планетарного ряда равен минус два с половиной (kред=-2,5).
Пример: при минимальном радиусе поворота автомобиля 5 м и колее 1,8 м: k1=-1,868; k2=-3,167.
В заявляемом устройстве по третьему конструктивному частному случаю (см. фиг. 4) входное звено МРМ связано с двигателем через коническую передачу.
Теперь конкретнее про СУ, реализующую ШИМД. Основными элементами системы являются (см. фиг. 4):
- электронный блок управления (ЭБУ) 1;
- дифференциальный усилитель 2;
- модулятор давления 3;
- исполнительный орган 4 - в данном случае электромагнитный клапан в магистрали фрикционного элемента управления (ФЭУ);
- датчик обратной связи 5.
Взаимосвязи всех перечисленных элементов СУ показаны на фиг. 4 линиями-стрелками.
Возможны другие кинематические схемы и конструкции в рамках заявляемых основной и дополнительных совокупностей существенных признаков.
Устройство работает под электронным управлением. СУ получает сигналы с датчиков частоты вращения ведущих колес K1, K2 автомобиля, информацию о тягово-скоростном режиме работы двигателя и трансмиссии, положении органов управления и др., что позволяет реализовать оптимальное в данных условиях движения управляющее воздействие на редукторную часть R.
Планетарный ряд «0», характеризующийся кинематическим параметром k0=2 (для обоих частных случаев выполнения устройства), как оговаривалось ранее, выполняет функции простого дифференциала (принцип действия известен специалистам и автолюбителям).
При полном включении тормоза T1 или Т2 реализуется расчетный радиус поворота в соответствующую сторону, согласованный по величине с минимальным радиусом поворота, задаваемым кинематикой рулевой трапеции.
Планетарные ряды 1 и 2 предназначены для перераспределения мощности между ведущими колесами K1, K2 (соответственно, M1ω1 и М2ω2) по командам СУ.
Если рассогласование частот вращения ω1 и ω2 ведущих колес K1, K2 автомобиля незначительно (конкретное допустимое значение рассогласования определяется расчетом или, предпочтительнее, экспериментально в зависимости от технических характеристик шасси транспортного средства), МРМ выполняет функции простого дифференциала, элементы управления отключены.
Перераспределение мощности осуществляется следующим образом.
Допустим, по условиям движения необходимо подать большую мощность на колесо K2, связанное со звеном Х2. Это достигается за счет включения тормоза Т2. При полном включении тормоза Т2 реализуется максимальное передаточное отношение u1-2 между бортами. При частичном включении - в диапазоне от 1 до максимального. Аналогично МРМ перераспределяет мощность в пользу другого борта путем полного или частичного включения тормоза T1.
Теперь о работе СУ.
Схема управления (см. фиг. 5) предназначена для реализации управляемого буксования ФЭУ, за счет чего достигается управление распределением сил тяги по ведущим колесам автомобиля.
При отсутствии необходимости ШИМД сигналы ЭБУ 1 и датчика обратной связи 5 равны. Дифференциальный усилитель 2 при равенстве сигналов на входе выдает на выходе нулевое напряжение, и на модулятор давления 3 выдается сигнал с нулевым коэффициентом заполнения (бесконечной скважностью), то есть импульсы напряжения на входе модулятора 3 отсутствуют. Электромагнит модулятора 3 обесточен, золотник находится в положении слива, элемент управления 4 выключен.
Для изменения распределения сил тяги ЭБУ 1 генерирует управляющий сигнал, пропорциональный значению требуемого буксования ФЭУ, что приводит к появлению сигнала ошибки на выходе дифференциального усилителя 2. Коэффициент заполнения сигнала на входе модулятора 3 становится близким к единице или равным единице. Электромагнит модулятора 3 включается и перебрасывает золотник в положение нагнетания. Происходит заполнение гидроцилиндра ФЭУ и его включение.
Как только начинается замедление затормаживаемого звена, МРМ перераспределяет силы тяги по ведущим колесам автомобиля. Это приводит к появлению поворачивающего момента, действующего на автомобиль, и к изменению угловых скоростей его ведущих колес. При этом сигнал ошибки с усилителя 2 снижается, что приводит к уменьшению значения коэффициента наполнения импульсов на входе модулятора 3. Модулятор 3 входит в режим модуляции и начинает попеременно подключать гидроцилиндр к магистрали нагнетания или слива. Далее наступит динамическое равновесие системы, и работающий ФЭУ пробуксовывает с постоянной скоростью, поддерживая заданное распределение тяговых сил.
Отключение управляющего сигнала ЭБУ приводит к уменьшению значения коэффициента заполнения до нуля. ФЭУ отключается, и МРМ переходит в режим работы симметричного дифференциала.
В качестве датчиков обратной связи 5 целесообразно использовать датчики частоты вращения ведущих колес, входящие в состав антиблокировочной тормозной системы (АБС), или установить датчики частоты вращения (индукционные, Холла или Виганда) на полуосях МРМ. Разница сигналов датчиков стремится к нулю при прямолинейном движении и изменяется пропорционально соотношению скоростей вращения колес моста при повороте или пробуксовке.
В качестве датчика обратной связи 5 может быть применен и датчик угловой скорости поворота автомобиля.
Сигнал датчика 5 можно выводить, как показано на схеме фиг. 5, на дифференциальный усилитель 2 или передавать через схемы усилителя и аналого-цифрового преобразователя на ЭБУ. В последнем случае на дифференциальный усилитель 2 от ЭБУ через схемы цифро-аналогового преобразователя и усилителя будут выведены два сигнала: управления и датчика 5 обратной связи.
Устройство позволяет управлять буксованием дисков тормозов и за счет этого получать оптимальное в данных эксплуатационных условиях передаточное отношение u1-2, а значит - нужное распределение сил тяги по колесам K1, K2 оси автомобиля (для межколесного дифференциала) или по осям автомобиля (для межосевого дифференциала).
В заявляемом устройстве нет двухвенцовых сателлитов (в отличие от прототипа) и фрикционных муфт (ШИМД для тормозов работает лучше: гидравлическая магистраль короткая и легче упростить сопряжения), а нагрузка на тормоза меньше. Следовательно, заявляемая конструкция технологичнее, проще, компактнее и разгруженнее прототипа.
В принципе, положительный эффект можно получить и при трех планетарных рядах (без дополнительного редукторного, в связи с чем он и назван «дополнительным редуктором»). Разумеется, при несколько иной взаимосвязи основных звеньев механизма, что достигается синтезом и отбраковкой вариантов кинематических схем. Но при этом, как показали авторские исследования, будут иметь место завышенные параметры ki планетарных рядов (в характерном примере авторами получены параметры первого и второго рядов соответственно -4,545 и -5,25, а значит - относительно большие габариты МРМ по высоте (диаметр не менее 300 мм)), что является терпимым, но все-таки недостатком в приложении к заднеприводным автомобилям (т.е. с продольным расположением трансмиссии с «выходом» в салон между передними сиденьями). Введение в устройство МРМ дополнительного редуктора в виде четвертого планетарного ряда позволяет синтезировать и сконструировать механизм с существенно меньшими параметрами ki, а значит, и с меньшими габаритами по высоте (диаметральным габаритом) всего МРМ. Что здесь и реализовано, с представлением конечного продукта - кинематической схемы МРМ с расчетными рациональными связями основных звеньев и параметрами ki, как объекта промышленной собственности.
Таким образом, заявляемое устройство, независимо от выбора частного исполнения схемы и конструкции (в том числе вариантов 1 и 2), позволяет устранить отмеченные выше недостатки прототипа и улучшить технико-эксплуатационные (в приложении к колесным шасси гражданских транспортных средств) или тактико-технические характеристики (в приложении к колесным шасси военных и специальных транспортных средств).
В частности, введение в устройство однорядного планетарного дополнительного редуктора позволяет уменьшить габариты МРМ по высоте (диаметру) при некотором увеличении габаритов по длине, при сохранении функциональных возможностей. Это чрезвычайно важно, например, для заднеприводных автомобилей.
Сравнивая три описанных частных случая реализации схем R как с прототипом, так и между собой, следует отметить следующие их особенности в отношении эффективности (положительные и отрицательные стороны).
Первый частный случай реализации отличается существенно уменьшенными габаритами по высоте (менее 300 мм), но наличие в двух рядах сателлитов со сцепленными колесами хотя и выступает относительно несущественной «платой» за преимущества, но стимулирует к дальнейшей оптимизации.
Во втором частном случае реализации достигнуты еще меньшие габариты по высоте (диаметральные габариты), а также явные технологические преимущества (уже всего один ряд с сателлитами со сцепленными колесами вместо одного, она более проста и удобнее в сборке/разборке и др.).
Третий частный случай реализации (как развитие, модернизация двух предыдущих) примечателен наиболее совершенной компоновкой трансмиссии в целом и адаптацией заявляемого МРМ к базовым компоновкам транспортных средств.
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм распределения мощности в трансмиссии автомобиля | 2014 |
|
RU2618830C2 |
| МЕХАНИЗМ РАСПРЕДЕЛЕНИЯ МОЩНОСТИ В ТРАНСМИССИИ ТРАНСПОРТНОГО СРЕДСТВА | 2021 |
|
RU2763002C1 |
| Двухрежимный дифференциальный механизм распределения мощности | 2024 |
|
RU2837931C1 |
| Межосевой дифференциальный механизм распределения мощности | 2022 |
|
RU2785499C1 |
| Трансмиссия секционной колесной машины, преимущественно трактора с шарнирно-сочлененной рамой | 2022 |
|
RU2796857C1 |
| Механизм распределения мощности в трансмиссии транспортного средства | 2022 |
|
RU2789152C1 |
| ГИБРИДНЫЙ МЕХАНИЗМ РАСПРЕДЕЛЕНИЯ МОЩНОСТИ В ТРАНСМИССИИ ТРАНСПОРТНОЙ МАШИНЫ | 2017 |
|
RU2658486C1 |
| Четырехгусеничное шасси | 2022 |
|
RU2798151C1 |
| ПЛАНЕТАРНАЯ СОСТАВНАЯ КОРОБКА ПЕРЕДАЧ ТРАНСПОРТНОГО СРЕДСТВА | 2008 |
|
RU2380596C1 |
| ПЛАНЕТАРНАЯ СОСТАВНАЯ КОРОБКА ПЕРЕДАЧ ТРАНСПОРТНОГО СРЕДСТВА | 2008 |
|
RU2382916C1 |
Изобретение относится к дифференциальным механизмам распределения мощности. Механизм распределения мощности (МРМ) в трансмиссии автомобиля содержит двухстепенную редукторную часть. Входное звено МРМ опосредованно связано с двигателем, а выходные звенья опосредованно, например, через полуоси - с ведущими колесами автомобиля. В состав МРМ входят планетарные зубчатые ряды (нулевой, дополнительный, первый и второй - в соответствии с последовательностью в направлении от входного к выходному звену). Нулевой ряд, непосредственно связанный с упомянутым входным звеном, функционально соответствует простому дифференциалу. Предусмотрены тормозные элементы T1 и Т2 с возможностью дифференцированного тормозного воздействия на звенья редукторной части и электронная система управления упомянутыми тормозными элементами. Редукторная часть выполнена с четырьмя цилиндрическими трехзвенными планетарными зубчатыми рядами. Входное ее звено соединено со звеньями двух планетарных рядов. Система управления тормозными элементами выполнена с возможностью широтно-импульсной модуляции давления во фрикционных контактных парах тормозных элементов. Достигается улучшение технико-эксплуатационных и тактико-технических характеристик. 3 з.п. ф-лы, 4 ил.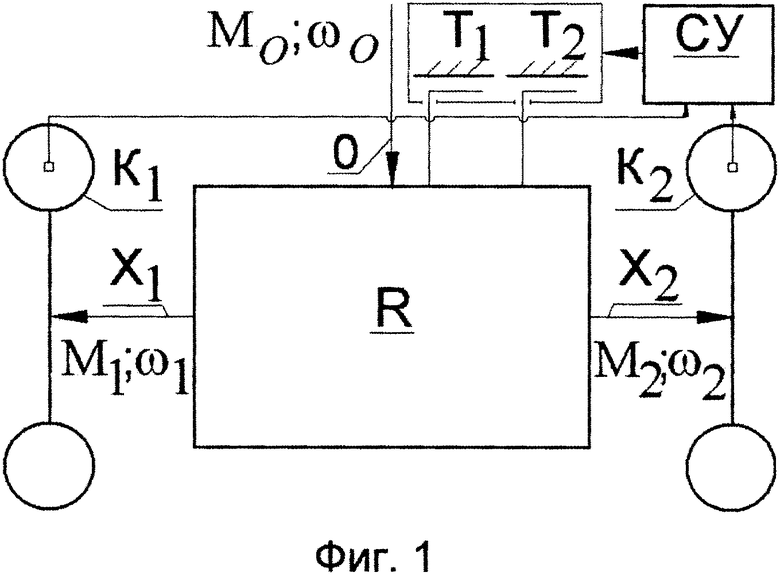
1. Механизм распределения мощности в трансмиссии автомобиля, содержащий двухстепенную редукторную часть, входное звено которого опосредованно связано с двигателем, а выходные звенья опосредованно, например, через полуоси связаны с левым и правым ведущими колесами автомобиля, с планетарными зубчатыми рядами - нулевым, первым и вторым, причем нулевой, непосредственно связанный с упомянутым входным звеном, - с функцией простого дифференциала, а также содержащий тормозные элементы с возможностью дифференцированного тормозного воздействия на звенья редукторной части и электронную систему управления упомянутыми тормозными элементами, отличающийся тем, что редукторная часть выполнена с четырьмя цилиндрическими трехзвенными планетарными зубчатыми рядами, включая дополнительный редукторный, при этом входное ее звено непосредственно соединено со звеньями двух планетарных рядов, а система управления тормозными элементами выполнена с возможностью широтно-импульсной модуляции давления во фрикционных контактных парах тормозных элементов.
2. Механизм по п. 1, отличающийся тем, что нулевой и дополнительный редукторный планетарные ряды выполнены с сателлитами из двух сцепленных зубчатых колес, входное звено соединено параллельно с эпициклом нулевого и солнцем дополнительного редукторного планетарных рядов, водило нулевого планетарного ряда соединено с одним ведущим колесом автомобиля, например левым, эпицикл нулевого планетарного ряда посредством сателлита из двух сцепленных зубчатых колес и солнца соединен, совместно с эпициклом первого и солнцем второго планетарных рядов, с другим, например правым, ведущим колесом автомобиля, солнце первого планетарного ряда совместно с эпициклом второго планетарного ряда связаны с первым тормозным элементом, водило второго планетарного ряда связано со вторым тормозным элементом, водило первого планетарного ряда объединено с эпициклом дополнительного редукторного планетарного ряда, а водило последнего установлено неподвижно, при этом кинематические параметры k1 и k2 соответственно первого и второго планетарных рядов отрицательны, а кинематические параметры k0 и kред соответственно нулевого и дополнительного редукторного планетарных рядов положительны и равны 2.
3. Механизм по п. 1, отличающийся тем, что нулевой планетарный ряд выполнен с сателлитами из двух сцепленных зубчатых колес, входное звено соединено параллельно с эпициклом нулевого и солнцем дополнительного редукторного планетарных рядов, водило нулевого планетарного ряда соединено с одним ведущим колесом автомобиля, например левым, солнца нулевого, первого и второго планетарных рядов объединены между собой и соединены с другим, например правым, ведущим колесом автомобиля, солнца первого, второго и дополнительного редукторного планетарных рядов объединены, эпицикл дополнительного редукторного планетарного ряда установлен неподвижно, а эпициклы первого и второго планетарных рядов связаны соответственно с первым и вторым тормозными элементами, при этом кинематические параметры k1 и k2 соответственно первого и второго планетарных рядов отрицательны, кинематический параметр k0 нулевого планетарного ряда равен 2, а кинематический параметр kрвд дополнительного редукторного планетарного ряда равен минус 2,5.
4. Механизм по любому из пп. 2, 3, отличающийся тем, что его входное звено связано с двигателем через коническую передачу.
| WO 2012007829 A2, 19.01.2012 | |||
| US 5547433 A, 20.08.1996 | |||
| СОСТАВ ДЛЯ БОРЬБЫ С ХЛОРОЗОМ И СТИМУЛИРОВАНИЯ РОСТА ОВОЩНЫХ КУЛЬТУР | 2002 |
|
RU2211564C1 |
| МЕХАНИЗМ РАСПРЕДЕЛЕНИЯ МОЩНОСТИ ДЛЯ ПРИВОДА ВЕДУЩИХ ОСЕЙ И КОЛЕС ТРАНСПОРТНОГО СРЕДСТВА | 1997 |
|
RU2125673C1 |

