Данное изобретение относится к поворотному телескопическому погрузчику, в котором предусмотрено несколько маршрутов для подъема в кабину и спуска из нее.
В существующем уровне техники известны телескопические погрузчики, состоящие из транспортного средства, оборудованного рамой или «платформой», перемещаемой на колесах и содержащей поворотное основание, на котором, в свою очередь, установлена кабина водителя и подвижная стрела, которая может быть выдвинута телескопически образом.
На дистальном конце стрелы выполнено устройство для подъема или перемещения грузов, такое как, например, вилочный захват, клеть, блок поперечной передачи, лебедка и т.д.
Кабина, в которой расположено водительское место, установлена на поворотной башне рядом с шарнирным устройством рабочей стрелы, которое ограничивает ее движения вверх и вниз.
На внешней стороне, которая противоположна стороне, прилегающей к стреле, то есть обычно с левой стороны, кабина имеет входной проем и дверцу, предназначенную для закрытия и открытия указанного проема, при этом с обеих сторон платформы, под кабиной и по существу на одной линии с дверцей кабины, когда указанная кабина находится в одном из двух противоположных положений, параллельных оси телескопического погрузчика, расположены лестницы для подъема и спуска, необходимые для того, чтобы подняться в кабину или спуститься с машины, находящейся в эксплуатации.
Поскольку телескопический погрузчик часто работает в условиях, когда башня расположена под углом к оси платформы, оператор тратит много сил и времени на выравнивание башни каждый раз, когда ему/ей необходимо спуститься с транспортного средства.
По указанной причине оператор может принять решение о выходе из кабины, когда башня все еще находится в угловом положении, перейти на платформу и затем спуститься на землю, при этом понятно, что для возвращения в кабину оператор должен снова подняться на платформу, а затем с нее в кабину.
В телескопических погрузчиках известного уровня техники данное действие уже является рискованным, когда башня установлена под углом к двери, обращенной к передней части платформы, и поэтому его следует избегать, причем такое перемещение становится действительно опасным, когда башня установлена под углом к двери, обращенной по направлению к задней части, что обусловлено габаритными размерами двери.
Техническая задача, лежащая в основе изобретения, заключается в создании поворотного телескопического погрузчика, который обеспечивает устранение недостатков известного уровня техники.
Согласно изобретению, указанная цель достигается с помощью погрузчика, выполненного в соответствии с п. 1 формулы изобретения.
Дополнительные характеристики и преимущества настоящего изобретения станут более понятными из неограничивающего описания предпочтительного, но не исключительного варианта выполнения предложенного телескопического погрузчика, изображенного на прилагаемых чертежах, на которых:
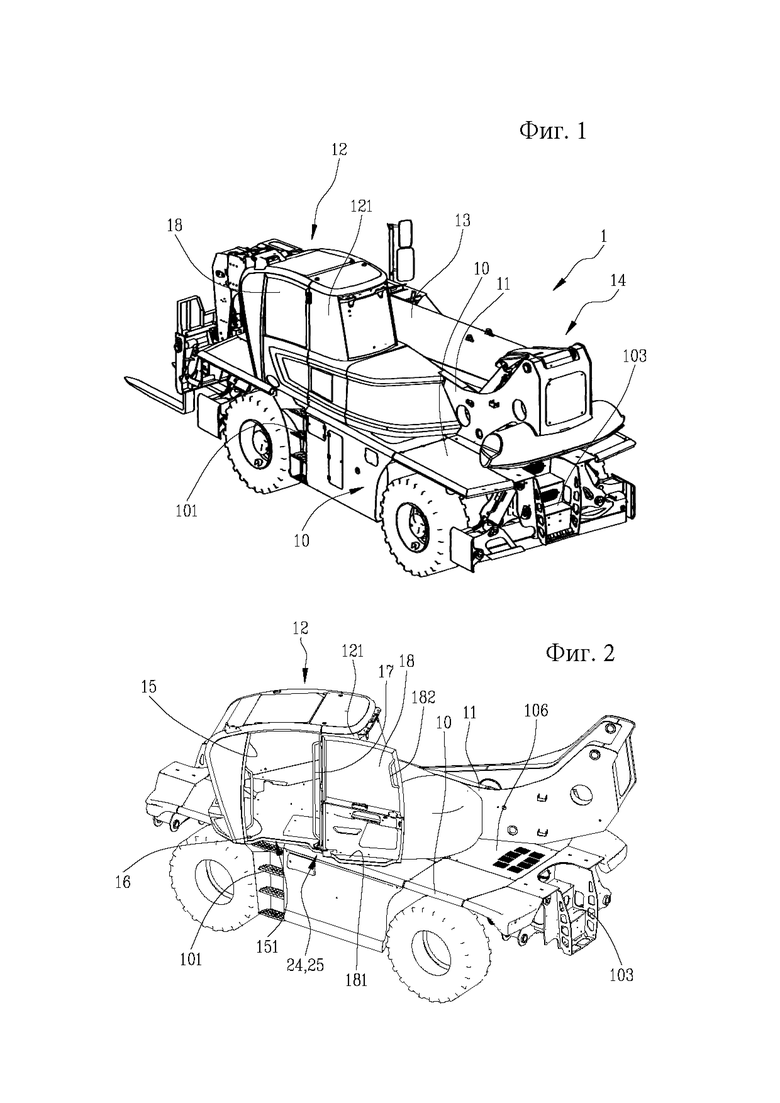
Фиг. 1 изображает вид сзади в аксонометрии телескопического погрузчика согласно изобретению, при закрытой дверце кабины,
Фиг. 2 изображает вид сзади в аксонометрии телескопического погрузчика согласно изобретению, при полностью открытой дверце и без рабочей стрелы, как показано на последующих чертежах,
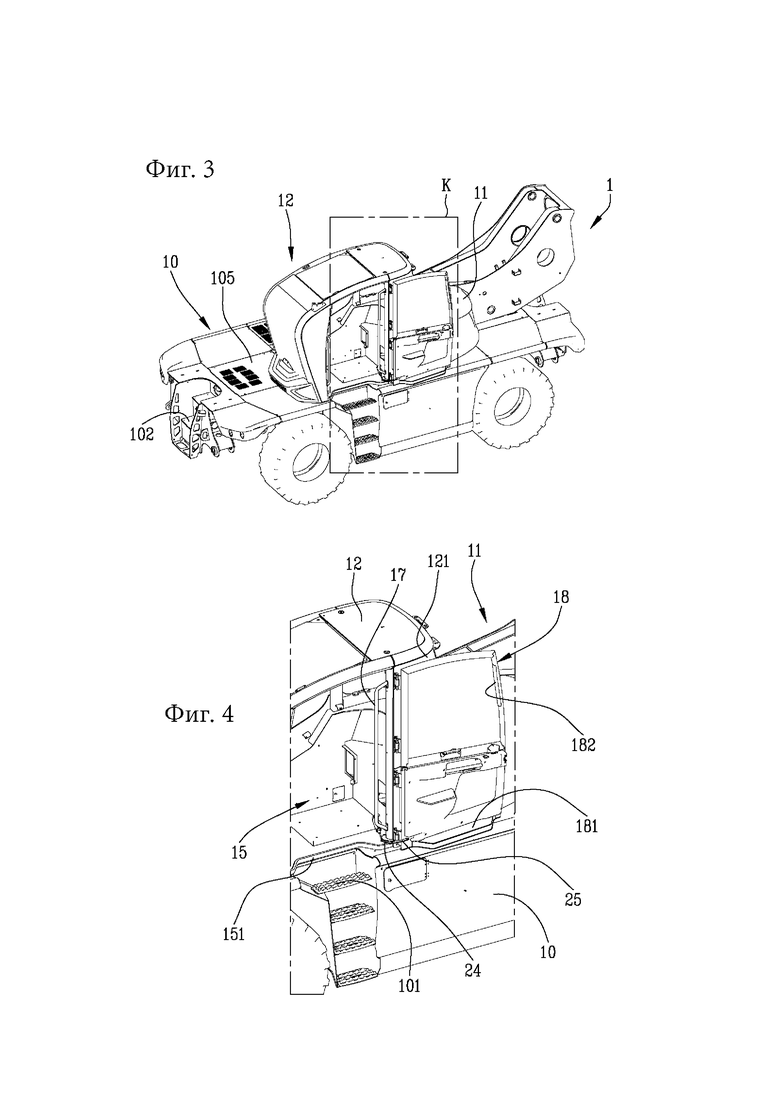
Фиг. 3 изображает вид спереди в аксонометрии телескопического погрузчика согласно изобретению, при полностью открытой дверце,
Фиг. 4 изображает увеличенный фрагмент К, показанный на Фиг. 3,
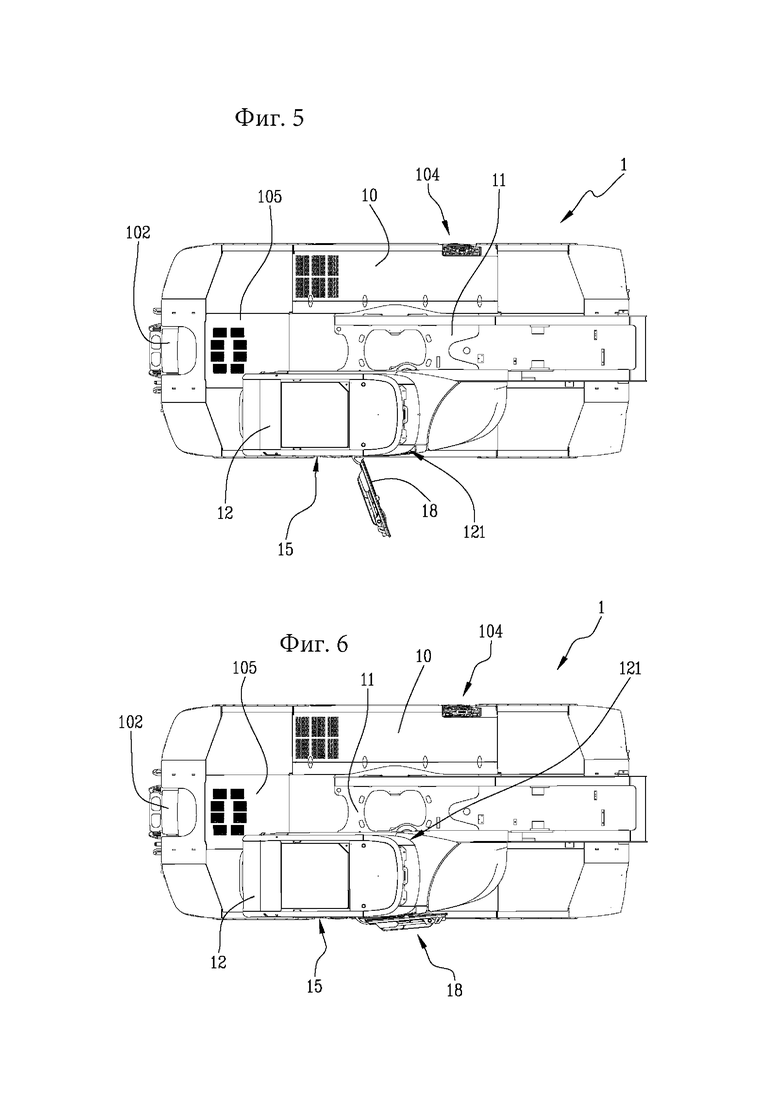
Фиг. 3 изображает вид сверху телескопического погрузчика, при этом дверца расположена в положении частичного открытия,
Фиг. 6 изображает вид, показанный на Фиг. 3, на котором дверца расположена в положении полного открытия,
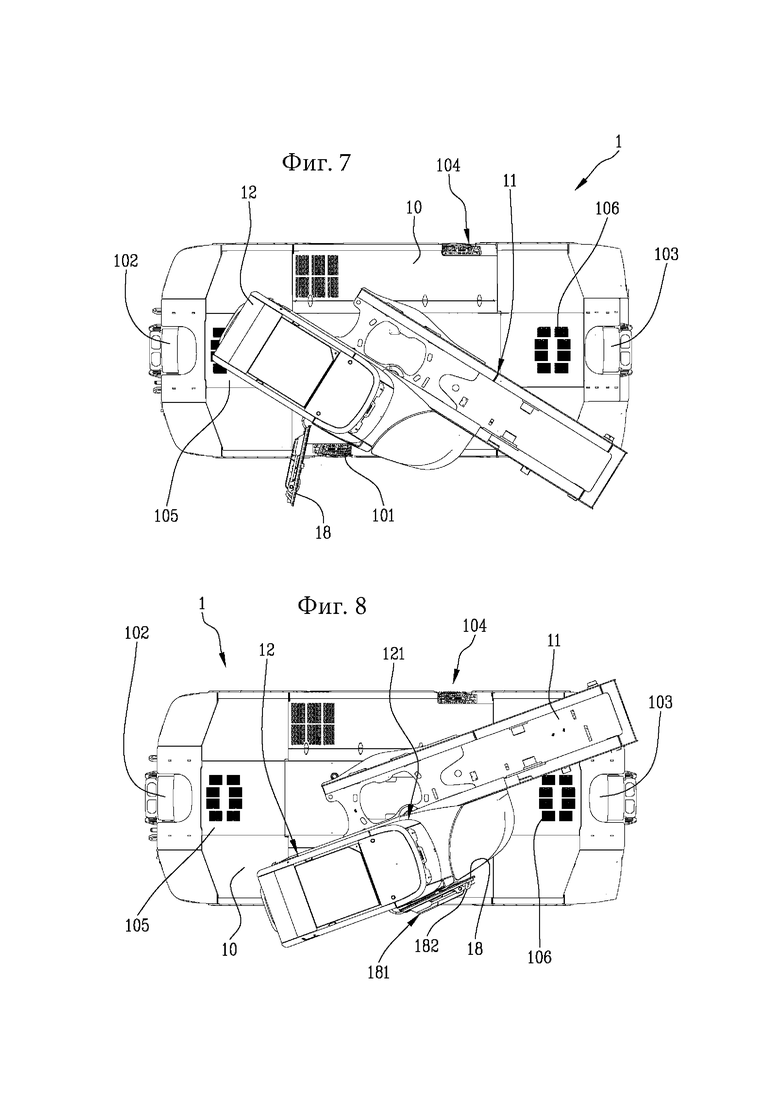
Фиг. 7 и 8 изображают виды сверху предложенного телескопического погрузчика в двух разных конфигурациях эксплуатации,
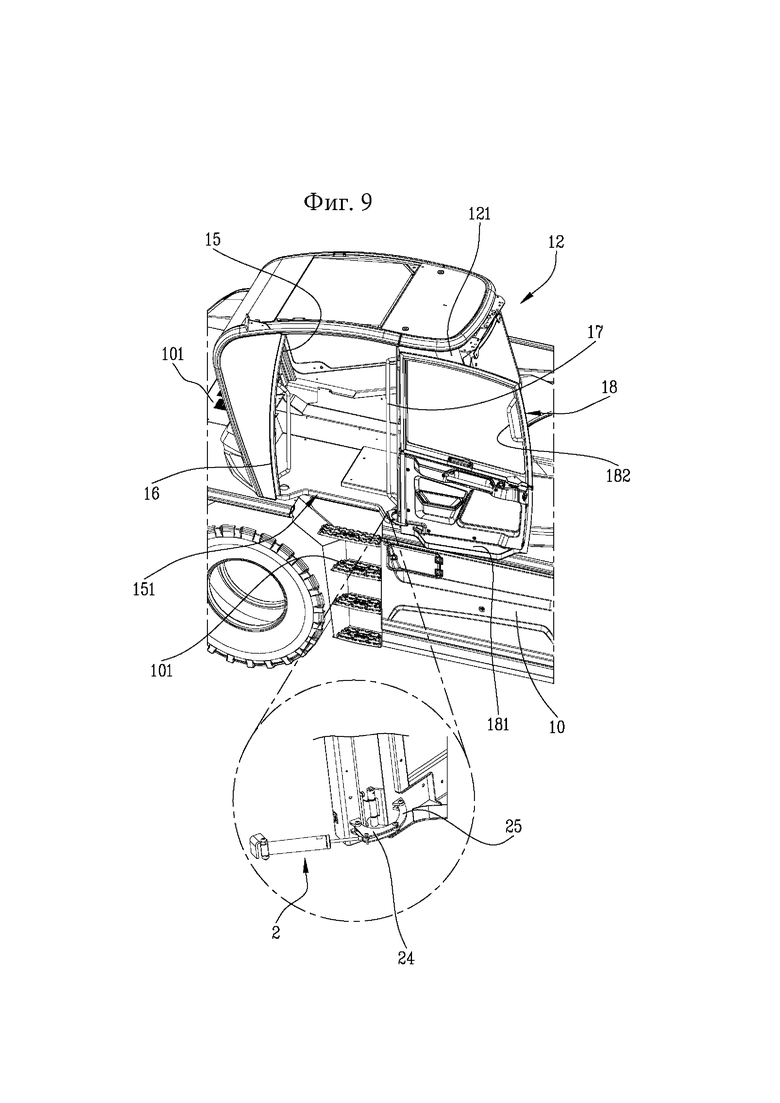
Фиг. 9 изображает частичный вид сбоку в аксонометрии телескопического погрузчика, с увеличенным изображением деталей,
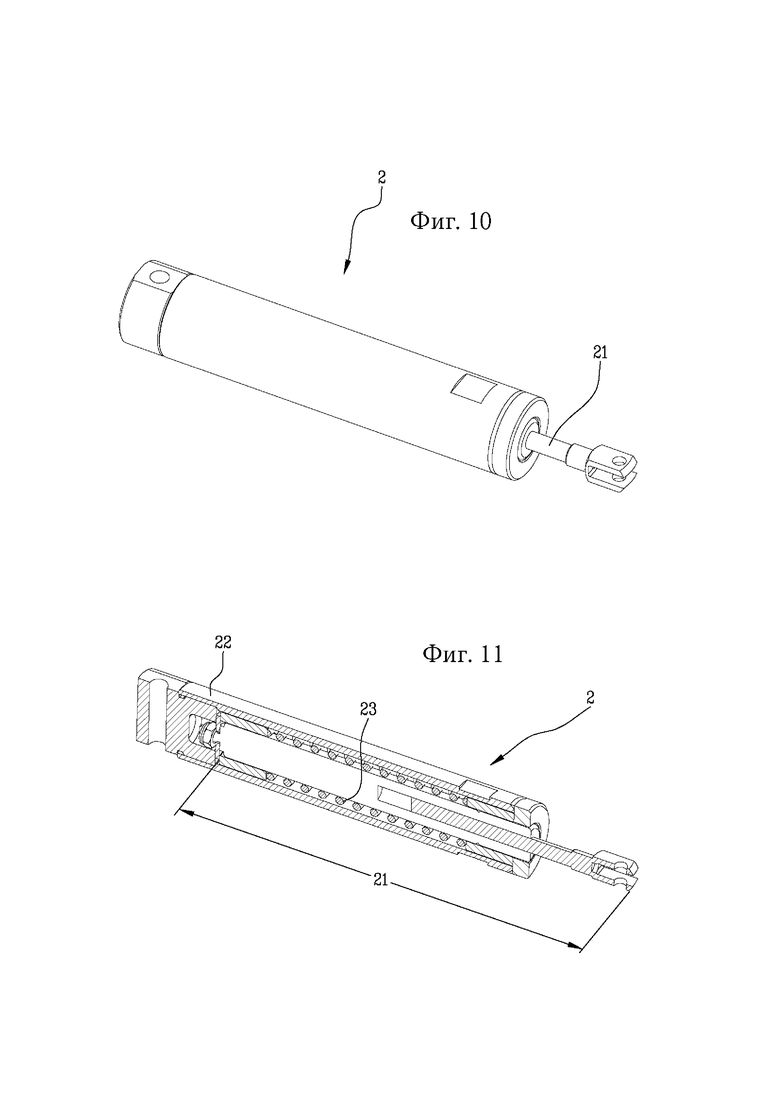
Фиг. 10 изображает вид в аксонометрии привода, используемого для перемещения дверцы кабины телескопического погрузчика, и
Фиг. 11 изображает привод, показанный на Фиг. 10, в продольном разрезе.
Как изображено на прилагаемых чертежах, номером 1 позиции в целом обозначен поворотный телескопический погрузчик, выполненный согласно изобретению.
Предлагаемый телескопический погрузчик оборудован рамой или «платформой» 10, перемещаемой на колесах и выполненной с поворотным основанием или «башней» 11, на которой, в свою очередь, установлены как кабина 12 водителя, так и рабочая стрела 13, которая может выдвигаться телескопическим образом (изображена только на Фиг. 1 для удобочитаемости других чертежей).
Стрела 13 шарнирным образом соединена с башней 11 посредством вала 14 с горизонтальной осью, так чтобы после приведения в действие посредством гидравлического цилиндра или аналогичного привода совершать вертикальные колебательные перемещения, выполняемые между нижним, по существу горизонтальным положением, и верхним положением, в котором стрела 13 приближена к вертикальной позиции.
Более подробно, башня может содержать опорную конструкцию 11, вместе с которой жестко смонтирована кабина 12 и которая образует вышеуказанный шарнир 14, к которому прикреплена стрела 13.
Кроме того, поворот башни 11 обеспечивает предпочтительно гидравлический привод, взаимосвязанный, например, с зубчатой рейкой.
Согласно главному аспекту изобретения платформа 10 имеет по существу прямоугольный периметр и лестницы 101, 102, 103, 104 для подъема и спуска, расположенные с каждой стороны, более конкретно, лестницы 101, 104, расположенные на длинных сторонах платформы 10, по существу симметричны относительно диагонали периметра, кроме того, лестницы предпочтительно встроены в раму платформы 10 (не показано на чертежах).
Кроме того, на верхней поверхности, вблизи лестниц 102, 103, выполненных на двух противоположных коротких сторонах, платформа 10 имеет соответствующие поверхности 105, 106, выполненные с протектором.
Изобретение было задумано для обеспечения возможности безопасного перемещения оператора к водительскому месту в кабине 12 и от указанного места, даже если башня 11 расположена не на одной линии с осью платформы 10, то есть с ее центральной продольной осью.
Другими словами, телескопический погрузчик 1 согласно изобретению преимущественно обеспечивает безопасную посадку и высадку оператора независимо от углового положения башни 11.
Для этого телескопический погрузчик 1 согласно изобретению имеет несколько маршрутов для подъема и спуска, которые свободны для прохода, то есть не имеют преград или препятствий, и предназначены для облегчения перемещения с земли наверх, к месту водителя, и обратного спуска, независимо от угловой ориентации башни 11.
Согласно предпочтительному варианту выполнения, изображенному на чертежах, имеется шесть свободных маршрутов для подъема и спуска.
Данные шесть маршрутов соответствуют такому же количеству конфигураций эксплуатации телескопического погрузчика 1, характеризующихся различными направленностями угловых положений башни 11 и доступом к соответствующим механическим конструкциям указанного погрузчика.
Однако, как станет понятнее из нижеприведенного описания, учитывая симметричную форму платформы 10, по меньшей мере в отношении положения лестниц 101, 102, 103, 104, шесть свободных маршрутов могут быть разделены на три отдельные пары, характеризующиеся одинаковой схемой пути и одинаковым способом использования оператором.
Поскольку можно идентифицировать переднюю и заднюю стороны платформы 10, соединенные правой и левой сторонами, то можно обозначить шесть возможных конфигураций эксплуатации телескопического погрузчика 1, которые соответствуют вышеуказанным шести свободным маршрутам.
Первый маршрут образован при переднем положении башни 11 (Фиг. 3, 4, 5 и 6), в котором ось башни параллельна оси платформы 10, при этом маршрут содержит: проем 15 для входа и выхода, выполненный сбоку кабины 12, одну или более ручек 16, 17, за которые оператор может держаться при подъеме или спуске, и первую лестницу 101, выполненную сбоку платформы 10.
В представленном варианте кабина 12 расположена слева от рабочей стрелы 13 относительно направления перемещения платформы 10, первая лестница 101 образована с левой стороны платформы 10, а проем 15 образован с левой стороны кабины 12, кроме того, может быть предусмотрена первая ручка 16, установленная с левой (или вертикальной) стороны проема 15 кабины 12 относительно направления входа, и вторая ручка 17, установленная с противоположной или вертикальной стороны, причем обе ручки 16, 17 могут быть параллельны соответствующей стороне, при этом длина указанных ручек может быть равна большей части длины соответствующей стороны.
Второй маршрут образован при переднем угловом положении башни 11, в котором башня расположена под углом относительно оси платформы 10, при этом проем 15 кабины 12 по существу обращен к передней части указанной платформы (см. Фиг. 7).
Если рассматривать в целом, в данной второй конфигурации передняя часть кабины 12 направлена внутрь платформы 10.
Второй маршрут содержит проем 15 кабины 12, вышеуказанную первую ручку 16, которая, если говорить в целом, установлена на самой выдвинутой стороне проема 15, первую поверхность 105 передней части платформы 10, выполненную с протектором, и вторую лестницу 102, образованную на передней стороне платформы 10.
Фактически, опять в предпочтительном варианте, когда кабина 12 расположена слева от стрелы, второй маршрут образован при повороте башни 11 вправо.
В переднем угловом положении проем 15 кабины 12 расположен над верхней поверхностью платформы 10, при этом данная поверхность образует вышеуказанную первую поверхность 105, выполненную с протектором, так что оператор может переходить между проемом и верхней поверхностью, используя первую ручку 16.
Первая поверхность 105, выполненная с протектором, заканчивается у второй лестницы 102, которая обеспечивает спуск на землю и выполнена за единое целое с платформой 10 или встроена в нее на передней стороне платформы.
Фактически, вторая лестница 102 не образована на платформе и не является отсоединяемой от нее, а выполнена в платформе 10 и образует ее часть.
В качестве конкретного или предельно допустимого варианта данной второй конфигурации можно рассматривать конфигурацию, в которой башня 11 расположена по существу поперек оси платформы 10.
Третий свободный маршрут, показанный на Фиг. 2 и 8, образован при заднем угловом положении башни 11, в котором башня расположена под углом относительно оси платформы 10, при этом проем 15 кабины 12 по существу обращен к задней части платформы 10, и в этом случае данная конфигурация включает вариант, в котором кабина 12 расположена по существу поперек платформы 10.
В целом, в третьей конфигурации телескопического погрузчика 1 передняя часть кабины 12 обращена к внешней стороне платформы 10.
Третий маршрут содержит проем 15, вышеуказанную вторую ручку 17, которая, если рассматривать в целом, установлена на самой выдвинутой стороне проема 15, вторую поверхность 106 задней части платформы 10, выполненную с протектором, и третью лестницу 103, образованную на задней стороне платформы 10, то есть сзади.
Третья лестница 103 также встроена в платформу 10 и образует ее часть.
Изобретение предпочтительно содержит дверцу 18, закрывающую проем 15 кабины 12 и совершающую колебательные перемещения вокруг шарнира, расположенного сбоку от проема 15, при этом указанная дверца перемещается между следующими тремя рабочими положениями: закрытое положение, в котором дверца закрывает проем 15 (см. Фиг. 1), положение частичного открытия, в котором дверца 18 не загораживает проем 15 и выступает наружу кабины 12 (показано на Фиг. 5 и 7), и положение полного открытия, в котором дверца 18 распахнута настежь и не выступает от кабины 12 (см. Фиг. 2, 3, 4, 6, 8 и 9).
В конфигурациях телескопического погрузчика 1, образующих первый и второй маршруты, дверца 18 должна быть открыта и может быть расположена как в положении частичного открытия, например, когда указанная дверца образует с плоскостью проема угол, составляющий приблизительно 90° и обращенный к внешней стороне кабины 12, так и в положении полного открытия, причем последнее положение характерно для конфигурации машины 1, в которой образован третий свободный маршрут для доступа и спуска.
Предпочтительно, в положении полного открытия дверца 18 образует с плоскостью проема 15 внешний угол, равный или превышающий 180°, чтобы способствовать спуску и подъему оператора между кабиной 12 и второй поверхностью 106 задней части платформы 10, выполненной с протектором, когда башня 11 расположена под углом относительно указанной платформы в заднем угловом положении.
Это может быть обеспечено при использовании кабины 12, выполненной с задней частью 121, поперечные размеры которой меньше размеров поперечного сечения, в котором расположен проем 15, например, поскольку указанная часть уменьшается по направлению к заднему концу, образуя по сути коническую форму.
В данном случае, в положении полного открытия дверца 18 может быть расположена рядом с наружной поверхностью задней части 121 кабины 12 и может удерживаться неподвижно с помощью средств 2 для регулировки положения дверцы (см. Фиг. 9).
Указанные средства могут содержать устройство 2 перемещения (изображено на Фиг. 10), которым может управлять оператор для автоматического перемещения дверцы 18 в положение полного открытия и удержания указанной дверцы в заблокированном положении по месту, а также для освобождения дверцы 18 с обеспечением ее возврата, например, в положение частичного открытия.
Согласно возможному варианту выполнения вышеуказанного устройства 2, оно может содержать пневматическую пружину 21, линейный привод 22 и упругий возвратный элемент 23, такой как пружина, функционально соединенный с линейным приводом 22 (см. Фиг. 11).
В данном случае устройство перемещения может работать следующим образом.
Перед спуском на землю оператор, находящийся в кабине, отпирает дверцу 18 и толкает ее таким образом, что пневматическая пружина 21 перемещает дверцу в положение частичного открытия, после чего под управлением оператора линейный привод, например гидроцилиндр 22, толкает дверцу 18 в положение полного открытия, тем самым предварительно нагружая упругий возвратный элемент 22, который также может представлять собой спиральную пружину 23, как изображено на чертеже.
Очевидно, что когда привод 22 не работает, упругий элемент 23 возвращает дверцу 18 в положение частичного открытия.
Приведение в действие может быть выполнено по команде из кабины 12 и/или с помощью дистанционного управления, например, путем подключения к кодам замка дверцы 18, при этом последнюю функцию предпочтительно используют, если линейный привод 22 устройства 2 перемещения является электрическим.
Дистальный конец пневматической пружины 21 может быть соединен с дверцей 18 посредством промежуточного кинематического механизма 24, 25, образованного двумя или более соединительными элементами 24, 25, шарнирным образом соединенными друг с другом, а также с дверцей 18 и пневматической пружиной 21, при этом кинематический механизм 24, 25 выполнен с возможностью поворота вокруг вертикальной оси поворота, соответствующей поворотному соединению, расположенному, например, по вертикали дверцы.
Как изображено на Фиг. 4 и 9, два соединительных элемента 24, 25 предпочтительно имеют форму кольцеобразных секторов и могут входить друг в друга с взаимным перекрытием, образуя устройство с минимальными размерами, таким образом, кинематический механизм 24, 25 обеспечивает частичное открытие, соответствующее первоначальному взаимному повороту относительно вышеуказанной вертикальной оси, а затем полное открытие дверцы 18, соответствующее дальнейшему повороту относительно оси, к которому добавляется выход одного элемента из другого путем взаимного поворота, обеспечивающего перемещение двух элементов 24, 25, которые в результате располагаются последовательным образом.
Предпочтительно, с внутренней стороны дверцы 18 ив ее нижней части расположена консольная поверхность 181, которая служит упором для ног и в положении полного открытия дверцы выступает наружу в качестве средства для облегчения прохода между проемом 15 кабины 12 и второй поверхностью 106, выполненной с протектором.
Плоскость дверцы 18 может соответствовать по форме углублению 151, образованному в полу кабины 12.
Более того, также может быть предусмотрена третья ручка 182, установленная на боковой поверхности с внутренней стороны дверцы 18.
Четвертый свободный маршрут образован при заднем положении башни 11, в котором соответствующая ось башни параллельна оси платформы 10, при этом четвертый маршрут ориентирован на 180° относительно первого маршрута и содержит: проем 15 для входа и выхода, образованный сбоку кабины 12, одну или более ручек 16, 17, за которые оператор может держаться при подъеме или спуске, и четвертую лестницу 104, выполненную сбоку платформы 10.
В данном случае кабина 12 расположена слева от рабочей стрелы 13 относительно оси платформы 10, четвертая лестница 101 выполнена с правой стороны платформы 10, а проем 15 образован с левой стороны кабины 12. В данном случае также предусмотрены первая и вторая ручки 16, 17, описанные выше.
Другими словами, если не считать того, что башня 11 ориентирована противоположным образом по отношению к первому маршруту, нет никакой разницы в конфигурации четвертого маршрута относительно первого маршрута, и оператор проходит их одинаковым образом.
Пятый свободный маршрут симметричен второму маршруту относительно диагонали периметра платформы 10, и поэтому не показан.
Фактически, пятый маршрут образован при заднем угловом положении башни 11, в котором башня расположена под углом относительно оси платформы 10, при этом проем 15 кабины 12 по существу обращен по направлению к задней части платформы 10, и в данном случае передняя часть кабины 12 обращена внутрь платформы 10.
Пятый маршрут содержит проем 15 кабины 12, вышеуказанную первую ручку 16, вторую поверхность 106 задней части платформы 10, выполненную с протектором, и третью лестницу 103, образованную с задней стороны платформы 10.
Конфигурация телескопического погрузчика 1, которая образует шестой свободный маршрут, симметрична конфигурации, образующей третий маршрут.
Шестой свободный маршрут образован при переднем угловом положении башни 11, в котором башня расположена под углом относительно оси платформы 10, при этом проем 15 кабины 12 по существу обращен по направлению к передней части платформы 10, и также и в этом случае указанная конфигурация включает случай, когда кабина 12 расположена по существу поперек платформы 10.
Если рассматривать в целом, в шестой конфигурации телескопического погрузчика 1 передняя часть кабины 12 обращена к внешней стороне платформы 10.
Шестой маршрут содержит проем 15, вторую ручку 17, первую поверхность 105, выполненную с протектором, и вторую лестницу 102.
Ниже кратко описан порядок действий согласно изобретению.
Если оператору необходимо спуститься или подняться, когда телескопический погрузчик 1 находится в рабочей конфигурации, в которой башня 11 выровнена относительно платформы 10, он/она воспользуется первой или четвертой лестницей 101, 104 и первой и/или второй ручкой 16,
17, закрепленными на противоположных сторонах проема 15.
С другой стороны, если телескопический погрузчик 1 находится в одной из рабочих конфигураций, в которой башня 11 смещена относительно платформы 10, при этом передняя часть кабины 12 обращена внутрь, то оператор, который хочет спуститься на землю из кабины 12, откроет дверцу 18, например, перемещая ее в вышеуказанное промежуточное положение, и спустится на платформу 10, воспользовавшись первой ручкой 16, затем он/она проследует по первой или второй поверхности 105, 106, выполненной с протектором, до второй или третьей лестницы 102, 103, чтобы добраться до земли, при этом очевидно, что возможен и обратный путь.
Если телескопический погрузчик 1 находится в рабочей конфигурации, в которой башня 11 расположена под углом относительно платформы 10, и передняя часть кабины 12 обращена наружу, оператор переместит дверцу 18 в положение полного открытия и, используя нижнюю опорную поверхность 181 дверцы 18, вторую и/или третью ручку 17, 182, спустится на платформу 10, откуда, перемещаясь по первой или второй поверхности 105, 106, выполненной с протектором, он/она дойдет до третьей или второй лестницы 103, 102 и в результате достигнет земли.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО И СИСТЕМА ЭКСТРЕННОГО СПУСКА ИЗ ЗДАНИЯ | 2005 |
|
RU2274481C1 |
| ПОЖАРНО-СПАСАТЕЛЬНАЯ МАШИНА | 2012 |
|
RU2517008C1 |
| ПОГРУЗЧИК | 2002 |
|
RU2230698C2 |
| УСТРОЙСТВО ДЛЯ СПАСЕНИЯ ЛЮДЕЙ | 2014 |
|
RU2552243C1 |
| БАШЕННЫЙ КРАН | 2003 |
|
RU2249559C1 |
| УСТРОЙСТВО ДЛЯ СПАСЕНИЯ ЛЮДЕЙ | 2013 |
|
RU2513859C1 |
| ПОДЪЕМНАЯ СИСТЕМА ДЛЯ ОБСЛУЖИВАНИЯ ВЫСОТНЫХ СООРУЖЕНИЙ (ВАРИАНТЫ) | 2005 |
|
RU2355623C2 |
| КРАН-ПОГРУЗЧИК (ВАРИАНТЫ) | 2006 |
|
RU2317248C2 |
| СТАРТОВЫЙ КОМПЛЕКС ДЛЯ ПРЕДСТАРТОВОЙ ПОДГОТОВКИ И ПУСКА РАКЕТЫ-НОСИТЕЛЯ С КОСМИЧЕСКОЙ ГОЛОВНОЙ ЧАСТЬЮ | 2006 |
|
RU2318707C1 |
| КРАН-МАНИПУЛЯТОР МЕТАЛЛОВОЗНЫЙ САМОСВАЛЬНОГО ТИПА | 2003 |
|
RU2245804C2 |
Изобретение относится к самоходным погрузчикам. Поворотный телескопический погрузчик (1) содержит платформу (10), перемещаемую на колесах, на которой установлена башня (11), кабину (12) водителя и рабочую стрелу. Телескопический погрузчик (1) имеет свободные маршруты для подъема и спуска: первый маршрут, заданный первым положением башни (11), в котором ось башни параллельна оси платформы (10), и содержащий проем (15) кабины (12), ручку (17), за которую может держаться оператор, и лестницу (101, 104), выполненную на боковой стенке платформы (10), второй маршрут, заданный угловым положении башни (11), в котором башня расположена под углом или поперечным образом относительно оси платформы (10), передняя часть кабины (12) обращена внутрь платформы (10). Второй маршрут содержит проем (15), первую ручку (16), установленную на первой стороне проема (15), поверхность (105, 106) платформы (10), выполненную с протектором, и дополнительную лестницу (102, 103), выполненную сбоку платформы (10), и третий маршрут, заданный другим угловым положением башни (11), в котором башня расположена под углом или поперечным образом относительно оси платформы (10), передняя часть кабины (12) обращена наружу платформы (10). Третий маршрут содержит проем (15), вторую ручку (17), установленную на второй стороне проема (15), поверхность (103, 102) платформы (10), выполненную с протектором, и лестницу (104, 103), выполненную на другой стороне платформы (10). Достигается возможность свободного прохода в кабину погрузчика. 9 з.п. ф-лы, 11 ил.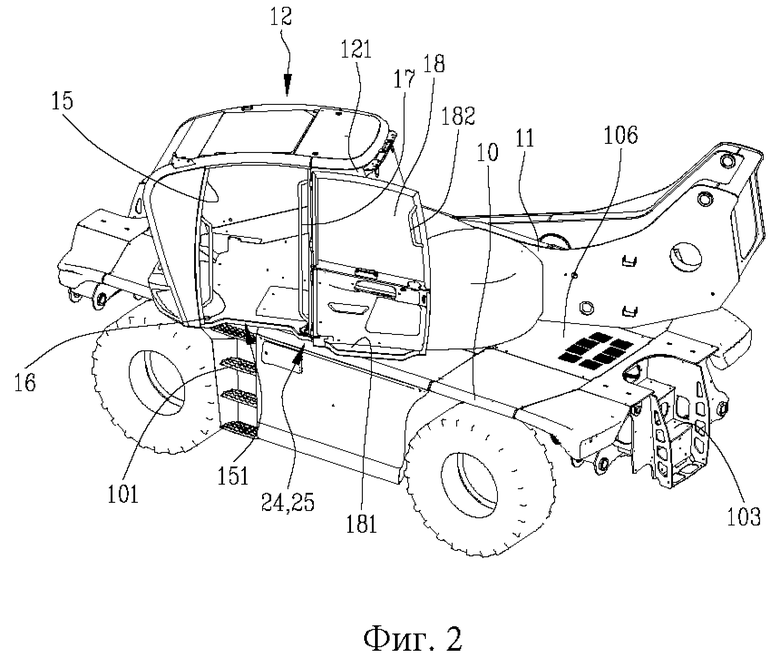
1. Поворотный телескопический погрузчик (1), содержащий платформу (10), перемещаемую на колесах, причем на указанной платформе установлена башня (11), на которой, в свою очередь, установлены кабина (12) водителя и рабочая стрела, при этом телескопический погрузчик (1) имеет следующие свободные маршруты для подъема и спуска: первый маршрут, заданный первым положением башни (11), в котором ось башни параллельна оси платформы (10), и содержащий проем (15) кабины (12), по меньшей мере одну ручку (17), за которую оператор может держаться, и лестницу (101, 104), выполненную на боковой стенке платформы (10), второй маршрут, заданный угловым положением башни (11), при котором башня расположена под углом или поперечным образом относительно оси платформы (10), при этом передняя часть кабины (12) обращена внутрь платформы (10), причем второй маршрут содержит проем (15), по меньшей мере первую ручку (16), установленную на первой стороне проема (15), поверхность (105, 106) платформы (10), выполненную с проектором, и дополнительную лестницу (102, 103), выполненную сбоку платформы (10), и третий маршрут, заданный другим угловым положением башни (11), при котором башня расположена под углом или поперечным образом относительно оси платформы (10), при этом передняя часть кабины (12) обращена наружу платформы (10), причем третий маршрут содержит проем (15), по меньшей мере вторую ручку (17), установленную на второй стороне проема (15), поверхность (103, 102) платформы (10), выполненную с протектором, и лестницу (104, 103), выполненную на другой стороне платформы (10), при этом на указанных первом, втором и третьем маршрутах отсутствуют препятствия, что обеспечивает свободный проход оператора.
2. Телескопический погрузчик по п. 1, имеющий шесть свободных маршрутов для подъема и спуска, которые соответственно содержат:
проем (15) кабины (12), одну или более ручек (16, 17), за которые оператор может держаться во время подъема или спуска, и первую лестницу (101), выполненную на первой стороне платформы (10),
проем (15) кабины (12), указанную первую ручку (16), первую поверхность (105) передней части платформы (10), выполненную с протектором, и вторую лестницу (102), выполненную на передней стороне платформы (10),
проем (15), вторую ручку (17), вторую поверхность (103) задней части платформы (10), выполненную с протектором, и третью лестницу (103), выполненную на задней стороне платформы (10),
проем (15), одну или более ручек (16, 17), за которые оператор может держаться при подъеме или спуске, и четвертую лестницу (104), выполненную на второй стороне платформы (10),
проем (15), первую ручку (16), вторую поверхность (106), выполненную с протектором, и третью лестницу (103), и
проем (15), вторую ручку (17), первую поверхность (105), выполненную с протектором, и вторую лестницу (102).
3. Телескопический погрузчик (1) по п. 1 или 2, в котором кабина (12) содержит панель (18) для закрытия проема (15) кабины (12), причем панель (18) выполнена с обеспечением совершения колебательных перемещений вокруг шарнира, расположенного сбоку от проема (15) и с возможностью перемещения между тремя следующими рабочими положениями: закрытым положением, в котором она закрывает проем (15), положением частичного открытия, в котором панель (18) не загораживает проем (15) и выступает наружу кабины (12), и положением полного открытия, в котором панель (18) не выступает из кабины (12).
4. Телескопический погрузчик (1) по п. 3, в котором в положении полного открытия панель (18) образует с плоскостью проема (15) внешний угол, составляющий 180° или более.
5. Телескопический погрузчик (1) по п. 3 или 4, в котором панель (18) имеет поверхность (181), служащую упором для ног и расположенную в соответствующей нижней части панели.
6. Телескопический погрузчик (1) по любому из пп. 3-5, в котором панель (18) содержит третью ручку (182) для оператора, установленную на внутренней поверхности панели.
7. Телескопический погрузчик (1) по любому из пп. 3-6, в котором по меньшей мере на указанном третьем свободном маршруте для подъема и спуска панель (18) находится в положении полного открытия.
8. Телескопический погрузчик (1) по любому из пп. 3-7, содержащий устройство (2) перемещения, управляемое оператором для автоматического перемещения панели (18) в положение полного открытия и удерживания панели в запертом положении, а также для освобождения панели (18) с обеспечением возможности ее возврата в положение частичного открытия.
9. Телескопический погрузчик (1) по п. 8, в котором устройство (2) перемещения содержит пневматическую пружину (21), линейный привод (22) и упругий возвратный элемент (23), функционально соединенный с линейным приводом (22).
10. Телескопический погрузчик (1) по любому из предыдущих пунктов, в котором кабина (12) расположена слева от рабочей стрелы относительно направления перемещения платформы (10), первая лестница (101) выполнена с левой стороны платформы (10), первая ручка (16) выполнена с левой стороны проема (15) кабины (12) относительно направления входа, а вторая ручка (17) выполнена с противоположной стороны.
| US 2017182946 A1, 29.06.2017 | |||
| DE 3020206 A1, 11.12.1980 | |||
| РАБОЧАЯ МАШИНА, В ЧАСТНОСТИ САМОСВАЛ ИЛИ ГРУЗОВОЙ АВТОМОБИЛЬ | 2015 |
|
RU2665984C2 |
| ПОГРУЗЧИК | 2002 |
|
RU2230698C2 |

