ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к области устройств для удаления отходов, широко используемых в ресторанах быстрого питания, торговых центрах, столовых и иных подобных объектах, в которых автоматическая система выгружает содержимое подноса с едой, и подносы укладываются на хранение для последующего использования. Кроме того, настоящее изобретение относится к системе, содержащей несколько устройств для удаления отходов, установленных на определенном объекте или в многоэтажном здании.
ТЕХНИЧЕСКАЯ ЗАДАЧА
Рестораны быстрого питания относятся к популярнейшим местам питания. Еду и напитки подают в пластиковой/бумажной упаковке, и после употребления еды и/или напитков упаковка и/или контейнеры для еды/напитков подлежат утилизации. Обычно еду и напитки подают на подносе прямо на стойку. Потребитель после приема пищи должен выбросить поднос вместе с отходами (остатками пищи/упаковкой). Удаление выполняют вручную в мусорные контейнеры и на стойки или полки, на которые устанавливают подносы. В одних случаях потребитель отделяет отходы от подноса, в других случаях он просто оставляет поднос с находящимися на нем отходами, поэтому оператор впоследствии отделяет отходы от подноса. Существует потребность в отслеживании заполнения каждого определенного мусорного контейнера, стойки или полки, и при заполнении опорожнять их вручную, иначе дальнейшее удаление отходов или подносов станет невозможным.
Очень похожая ситуация складывается в столовых и иных подобных заведениях.
Задачей настоящего изобретения является решение описанных выше проблем путем разработки устройства для удаления отходов, которое будет отличаться автоматизацией, безопасностью использования, эксплуатационной надежностью и высоким качеством работы в тех случаях, когда необходимо удалять поднос с отходами таким образом, чтобы отходы отделялись от подноса и удалялись в соответствующий приемник, а подносы укладывались на хранение для последующего использования.
Кроме того, важным аспектом настоящего изобретения является сокращение трудозатрат на удаление отходов и сбор подносов.
Следующая задача, решенная автором изобретения, заключается в интеграции нескольких устройств для удаления отходов в многоэтажном здании, что повышает эффективность удаления отходов и обработки подносов.
ОПИСАНИЕ УРОВНЯ ТЕХНИКИ
В настоящее время в ресторанах быстрого питания широко распространена ручная система, в которой пользователь после употребления пищи берет поднос с находящимися на нем отходами (остатками пищи, упаковкой и/или пластиковыми столовыми приборами) и несет его к стойке, служащей для удаления подноса вместе с отходами. После того, как упомянутая стойка будет заполнена подносами, ее перемещают в соответствующее место, в котором оператор вручную удаляет отходы с подноса в контейнер для отходов или аналогичное место.
В другом варианте используют мусорные контейнеры, причем пользователь отделяет отходы от подноса и удаляет их в разные мусорные контейнеры, в частности, предназначенные для пластика, бумаги, органических отходов и т.д.
Все эти работы требуют ручного труда, постоянного визуального контроля и предполагают значительный объем дополнительной работы по удалению отходов и обработке подносов.
Автор изобретения не обнаружил в уровне техники устройство, автоматически отделяющее отходы от подноса и укладывающее подносы на хранение в соответствующем месте таким образом, как раскрыто здесь.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Устройство для удаления отходов, предназначенное для приема подносов и раскрытое в настоящей патентной заявке, преодолевает все недостатки предшествующего уровня техники. Основными компонентами устройства для удаления отходов являются: устройство приема подноса, устройство обработки подноса, приемник для удаления отходов и устройство хранения подносов. Эти компоненты собраны таким образом, чтобы при работе устройства для удаления отходов устройство приема подноса принимало поднос с отходами, транспортируемый к устройству обработки подноса, удаляющему отходы с подноса в приемник для удаления отходов, после чего указанный поднос укладывается на хранение в устройство хранения подносов. Устройство приема подноса содержит инфракрасные датчики для распознавания руки и инфракрасные датчики для распознавания подноса, платформу для приема подноса, устройство регулировки подноса и устройство транспортировки подноса. Во время работы устройства для удаления отходов, по меньшей мере, два инфракрасных датчика показывают отсутствие руки вблизи устройства приема подноса, когда платформа для приема подноса не находится в положении для приема подноса, причем факт установки подноса на платформу для приема подноса обнаруживают посредством двух инфракрасных датчиков с линзами, после чего поднос автоматически устанавливается в нужное положение устройством регулировки подноса, что позволяет транспортировать поднос устройством транспортировки подноса к устройству обработки подноса. Устройство регулировки подноса содержит устройство направления подноса и устройство распознавания подноса, причем устройство распознавания подноса предназначено для определения того, находится ли поднос в правильном положении во время работы устройства для удаления отходов, и если это не так, то устройство направления подноса автоматически направляет поднос в правильном положении к устройству обработки подноса. Данное устройство направления подноса реализовано с использованием двух листов, закрепленных с каждой стороны конструкции машины на уровне платформы для приема подноса и сужающих платформу в направлении устройства обработки подноса. Устройство распознавания подноса реализовано с использованием инфракрасных датчиков и микровыключателей.
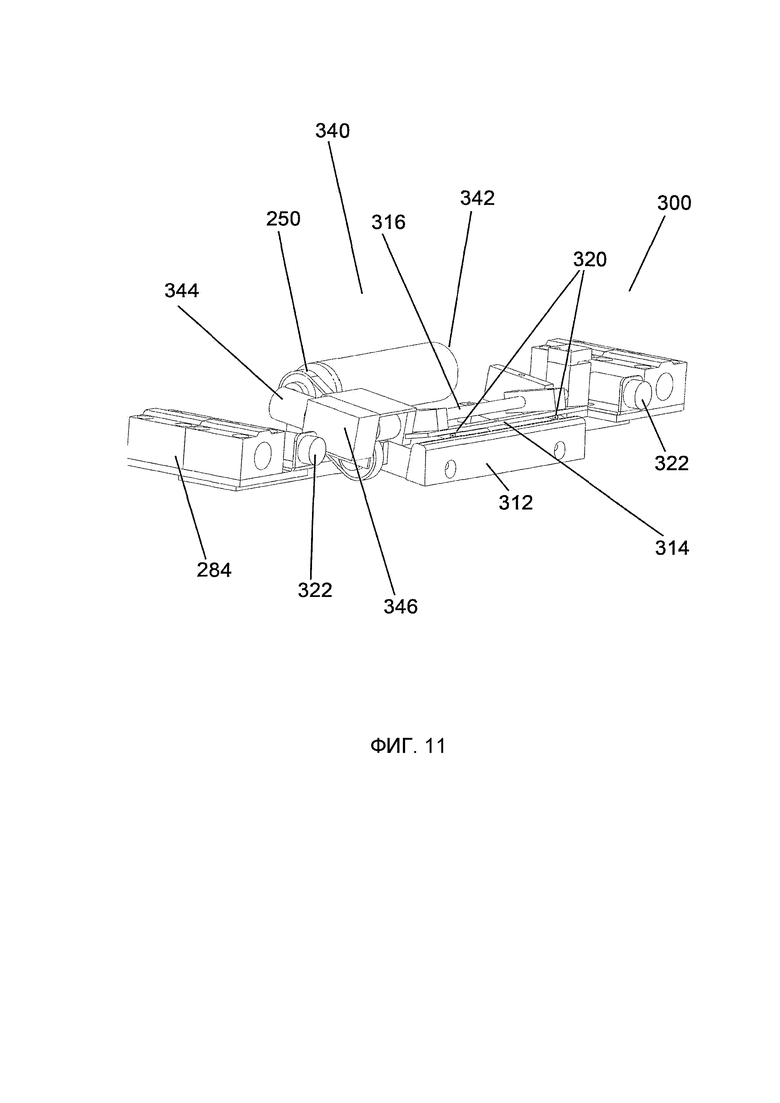
Устройство обработки подноса содержит зажим, устройство определения положения, устройство встряхивания и устройство горизонтальной транспортировки зажима, причем зажим подходит для захвата части подноса. Во время работы устройства для удаления отходов устройство горизонтальной транспортировки зажима перемещает поднос между первым положением и вторым положением или удерживает его в одном из этих положений. Открытый зажим принимает поднос из устройства приема подноса, когда устройство горизонтальной транспортировки зажима находится в первом положении, и зажим закрывается, когда устройство определения положения обнаруживает, что часть подноса находится в зажиме, причем поднос находится в горизонтальном положении. Затем зажим закрывается, поднос остается зажатым в зажиме и поднимается вместе с зажимом примерно на 10 мм вверх, в результате чего освобождается достаточно места для перемещения платформы в этой части машины, освобождая пространство для поворота подноса. После того как платформа достигает этой части машины, поднос поворачивается вместе с зажимом вниз в наклонное положение, обычно на угол более 70° и менее 85°, что позволяет отходам упасть с подноса в приемник для удаления отходов, расположенный под зажимом. Когда поднос достигнет указанного положения, устройство встряхивания встряхивает поднос таким образом, чтобы частицы, прилипшие к подносу, отсоединились от поверхности подноса. После встряхивания подноса зажим вместе с подносом поворачивают назад, в результате чего поднос возвращается в исходное горизонтальное положение, оставаясь зажатым в зажиме. Когда поднос занимает это положение, платформа перемещается обратно в свое первое положение, открывая пространство для перемещения захваченного зажимом подноса устройством горизонтальной транспортировки зажима к устройству хранения подносов. Когда поднос находится в конечном положении в устройстве хранения подносов, зажим вместе с подносом слегка поворачивается вниз в положение, в котором зажим открывается и доставляет поднос на основание для сбора подносов.
Устройство хранения подносов содержит основание для сбора подносов, подъемное устройство и устройство определения количества подносов. Во время работы устройства для удаления отходов поднос из устройства обработки подноса помещается на основание для сбора подносов, подъемное устройство опускает это основание вниз до положения, определяемого устройством определения количества подносов, в результате чего новый поднос может оказаться сверху подноса, уже находящегося на основании для сбора подносов, подносы складываются на основание для сбора подносов друг на друга до уровня, при котором устройство определения количества подносов обнаруживает, что максимальное количество подносов на основании для сбора подносов достигнуто.
В следующем усовершенствованном примере осуществления устройство для удаления отходов дополнительно содержит устройство распознавания уровня отходов, устройство сжатия и устройство удаления приемника. Устройство распознавания уровня отходов определяет уровень отходов в приемнике для удаления отходов, и если уровень отходов соответствует заранее заданному значению, устройство сжатия сжимает эти отходы, и после распознавания заполнения приемника для удаления отходов указанный приемник удаляется из устройства для удаления отходов посредством устройства удаления приемника или вручную. В качестве приемника для удаления отходов обычно используют мешок. В случае использования пластикового мешка в следующем усовершенствованном примере осуществления можно использовать устройство сварки пластика, установленное в устройстве для удаления отходов и выполненное с возможностью заваривания концов мешка, заполненного отходами. Это предотвращает рассыпание отходов при удалении из устройства для удаления отходов.
Кроме того, устройство сжатия может дополнительно содержать
расположенную горизонтально пластину, имеющую верхнюю сторону и нижнюю сторону, два комплекта рычагов ножничного типа, каждый из которых имеет точку опоры и два рычага, при этом первый рычаг и второй рычаг закреплены в точке опоры в середине каждого рычага таким образом, чтобы первый рычаг можно было поворачивать относительно второго рычага, причем каждый рычаг имеет первый и второй конец, причем первый конец прилегает к пластине,
два нижних ползуна, каждый из которых прикреплен к первому концу первого рычага,
две линейные направляющие с закрытыми концами, параллельно установленные на верхней стороне пластины,
две линейные направляющие с закрытыми концами, параллельно установленные на устройстве приема подноса,
два верхних ползуна, каждый из которых прикреплен ко второму концу второго рычага, и устройство зацепления.
Каждый нижний ползун установлен на каждой линейной направляющей, установленной на верхней стороне пластины, таким образом, чтобы этот ползун мог скользить по этой линейной направляющей вместе с концом рычага между концами этой линейной направляющей, при этом каждый верхний ползун установлен на каждой линейной направляющей, установленной на устройстве приема подноса, таким образом, чтобы этот ползун мог скользить по этой линейной направляющей вместе с концом рычага между концами этой линейной направляющей, причем верхние ползуны перемещаются посредством устройства зацепления, причем при активированном устройстве зацепления верхние ползуны перемещаются параллельно в направлении, определяемом вращением шпинделя, приводимого в движение электродвигателем шпинделя, что позволяет перемещать пластину вертикально вверх или вниз. При необходимости сжатия отходов в приемнике для удаления отходов пластину перемещают вниз, а при необходимости возврата пластины в исходное положение пластину перемещают вверх.
Устройство для удаления отходов может дополнительно содержать передний отсек и задний отсек, расположенные таким образом, чтобы приемник для удаления отходов находился в переднем отсеке, а устройство хранения подносов - в заднем отсеке.
Объектом настоящего изобретения также является система удаления отходов, содержащая, по меньшей мере, одно раскрытое выше устройство для удаления отходов, по меньшей мере, одно устройство сбора подносов и, по меньшей мере, один горизонтальный туннель. Кроме того, в другом примере осуществления система удаления отходов содержит, по меньшей мере, одно раскрытое выше устройство для удаления отходов и, по меньшей мере, один вертикальный туннель. В следующем примере осуществления изобретения система удаления отходов содержит, по меньшей мере, одно раскрытое выше устройство для удаления отходов, по меньшей мере, один вертикальный туннель и, по меньшей мере, один горизонтальный туннель. При наличии комбинации, по меньшей мере, одного горизонтального туннеля и, по меньшей мере, одного вертикального туннеля возможен вариант, в котором, по меньшей мере, один вертикальный туннель пересекает под прямым углом, по меньшей мере, один горизонтальный туннель и хотя бы одно устройство для удаления отходов в этой системе, причем во время работы и при достижении максимального уровня отходов в данном устройстве или при достижении максимального количества подносов в устройстве хранения подносов данное устройство для удаления отходов размещено над отверстием вертикального туннеля таким образом, чтобы передний отсек располагался над вертикальным туннелем, а задний отсек - над отверстием горизонтального туннеля.
Обычно приемник для удаления отходов представляет собой мешок.
В такой системе, содержащей, по меньшей мере, один горизонтальный туннель, по меньшей мере, одно устройство для сбора подносов имеет возможность перемещаться в горизонтальном направлении в пределах горизонтального туннеля между, по меньшей мере, одним устройством для удаления отходов и местом для опорожнения этого устройства для сбора подносов.
Мешок, заполненный отходами, сначала запечатывается в устройстве для удаления отходов, а затем удаляется из устройства через вертикальный туннель. Важно запечатать мешок, чтобы отходы не рассыпались по всему туннелю или не распространяли неприятный запах в туннеле. Обычно применяют технологию сварки мешков, т.е. когда отходы удаляют в полиэтиленовый мешок, используют технологию сварки полиэтилена. После того, как устройство хранения подносов будет заполнено подносами, устройство сбора подносов забирает эти подносы и транспортирует их к месту опорожнения.
Обычно устройство сбора подносов представляет собой подъемную платформу ножничного типа с электроприводом и колесами, что позволяет ей линейно перемещаться по направляющим в горизонтальном туннеле. Кроме того, в состав такой системы может входить контейнер, расположенный под вертикальным туннелем, вследствие чего каждый наполненный отходами мешок при перемещении дверцы в виде платформы, установленной на дне устройства для удаления отходов, удаляется, падая по вертикальному туннелю, в этот контейнер.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Прилагаемые изображения, на которые ссылается описание и которые входят в состав заявки, иллюстрируют наилучший пример осуществления изобретения и помогают объяснить основные принципы изобретения. Настоящее изобретение никоим образом не ограничивается чертежами, включенными в настоящую заявку.
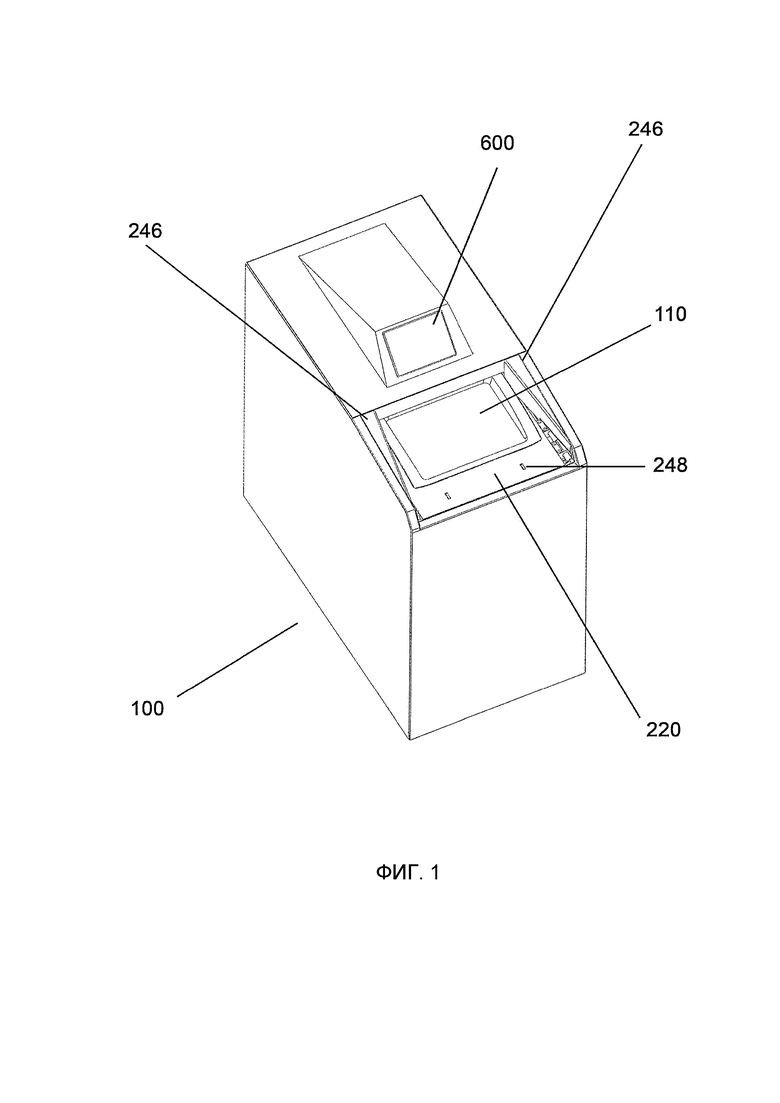
Фиг. 1. Устройство для удаления отходов с подносом, размещенным на устройстве приема подноса
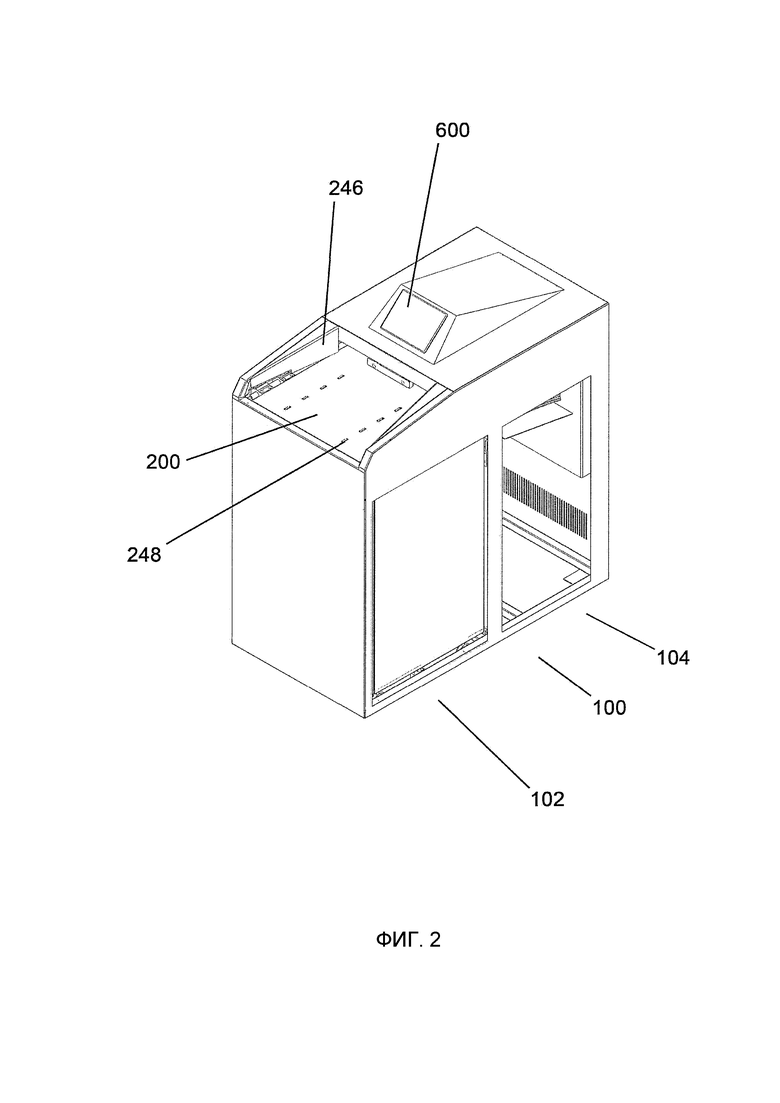
Фиг. 2. Устройство для удаления отходов
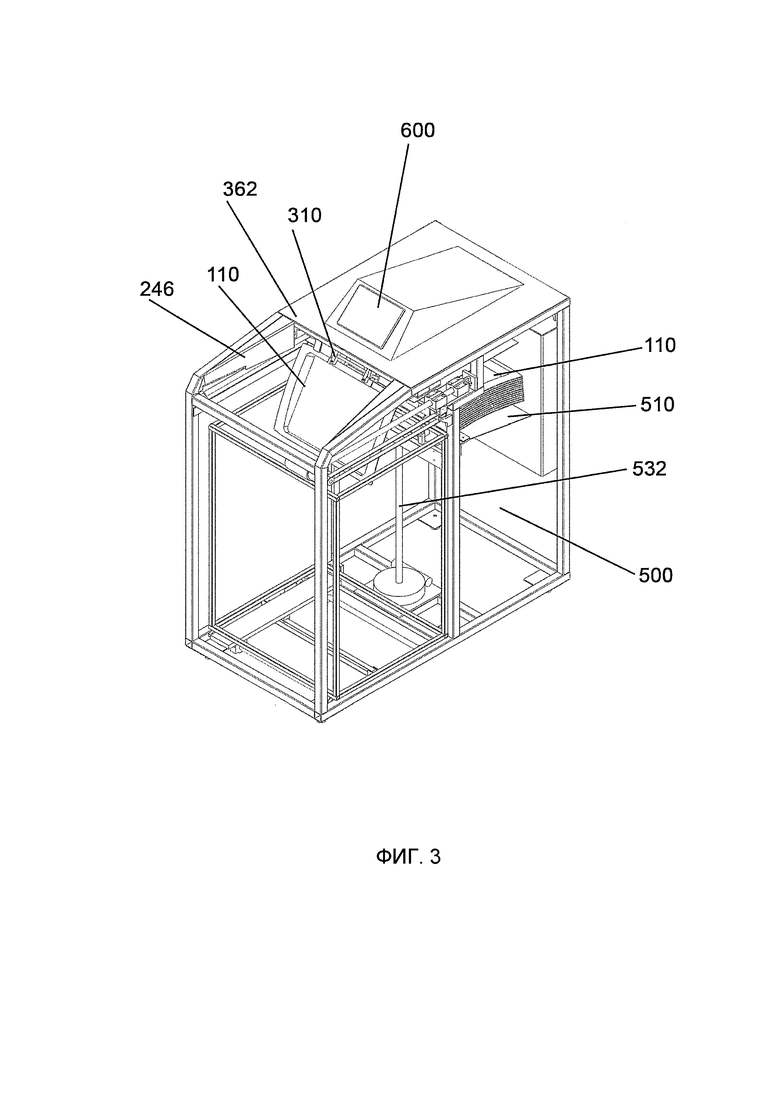
Фиг. 3. Устройство для удаления отходов без корпуса с подносом на устройстве обработки подноса
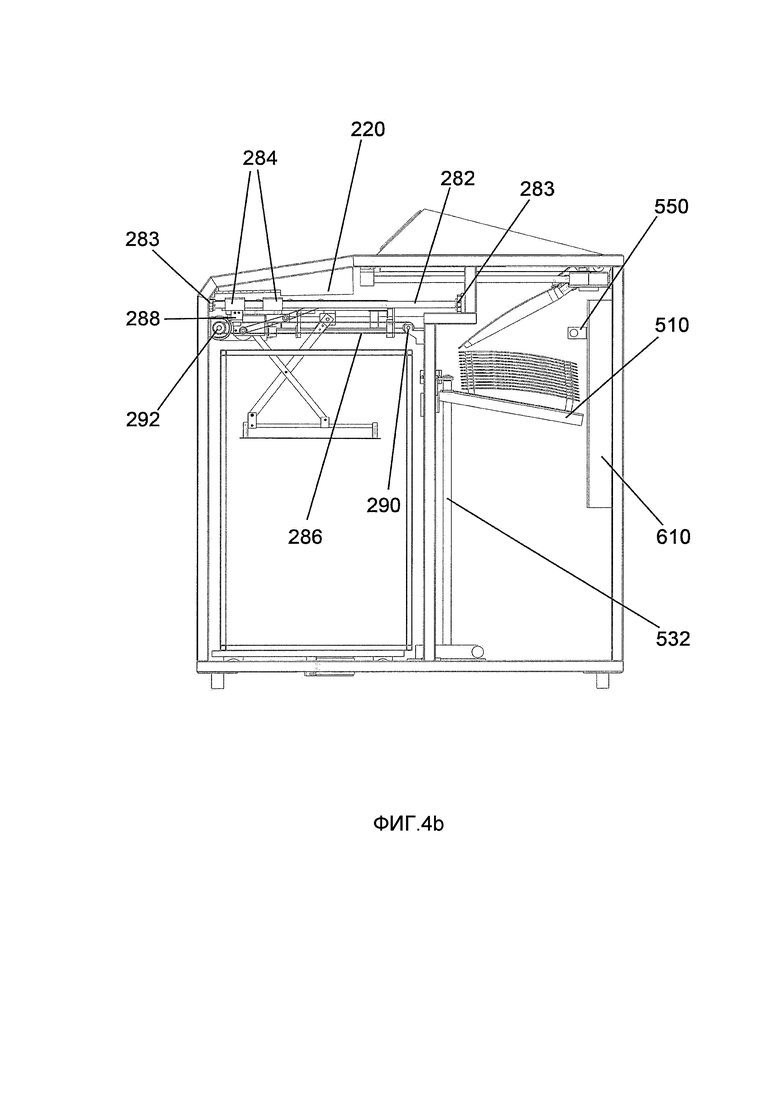
Фиг 4.a., 4.b. Устройство для удаления отходов, вид изнутри, с подносами, собранными на основании для сбора подносов, и рычагами ножничного типа в открытом положении (пластина прижата)
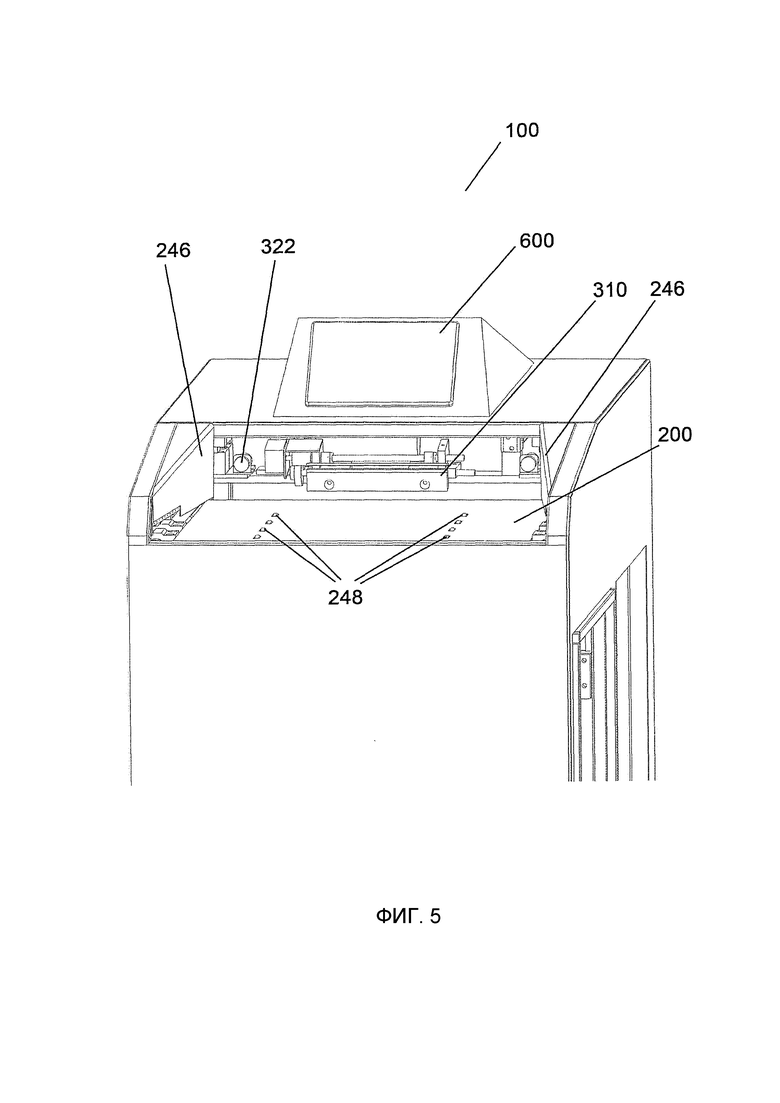
Фиг. 5. Вид спереди на устройство обработки подноса
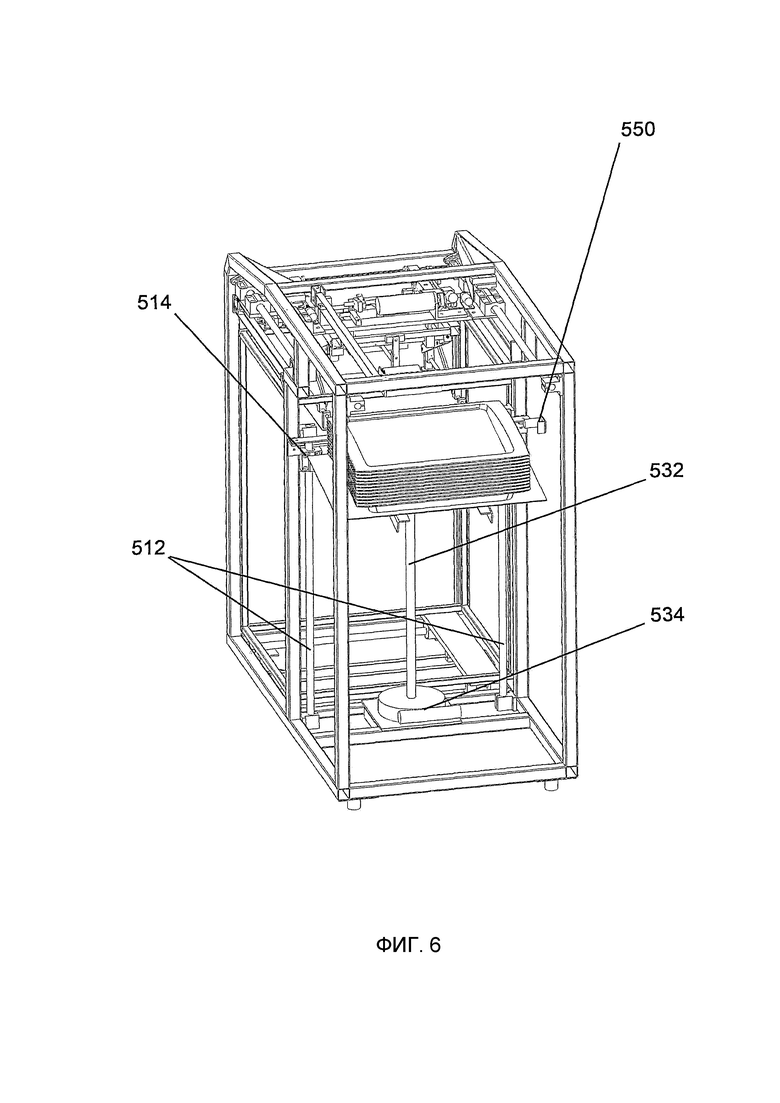
Фиг. 6. Вид сзади на устройство хранения подносов
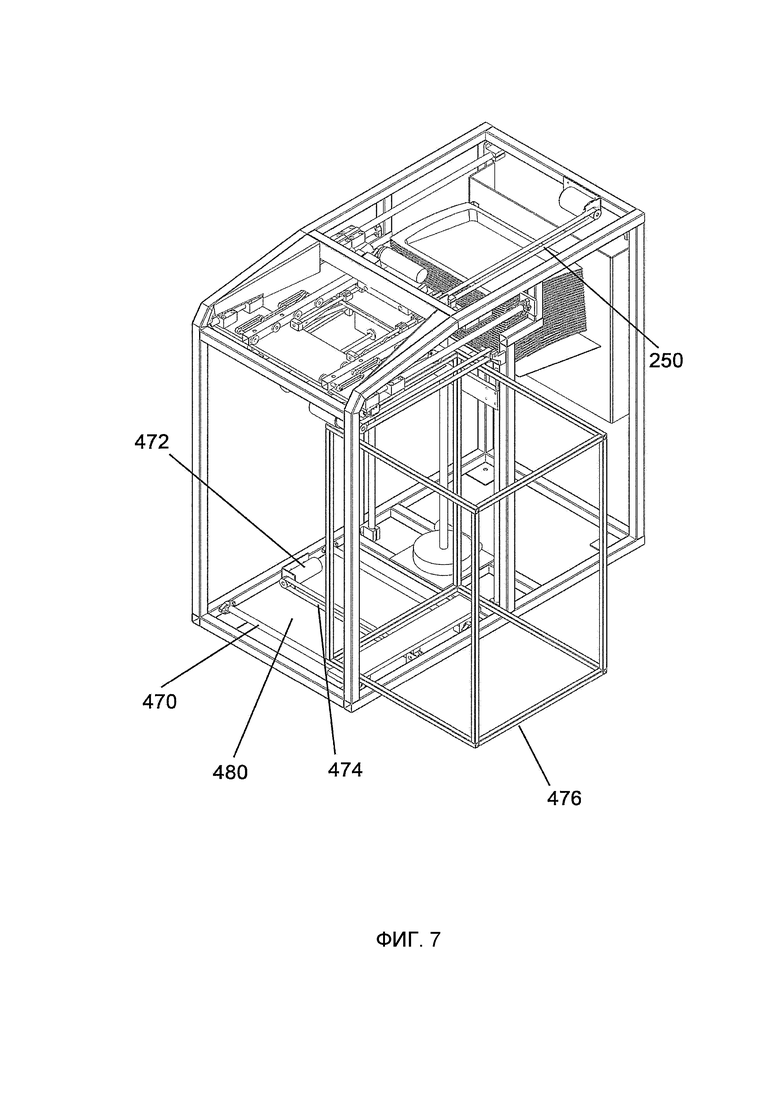
Фиг. 7. Детализированный вид приемника для удаления отходов
Фиг. 8. Детализированный вид направляющей платформы с подшипником, приводным ремнем и датчиками для распознавания рук
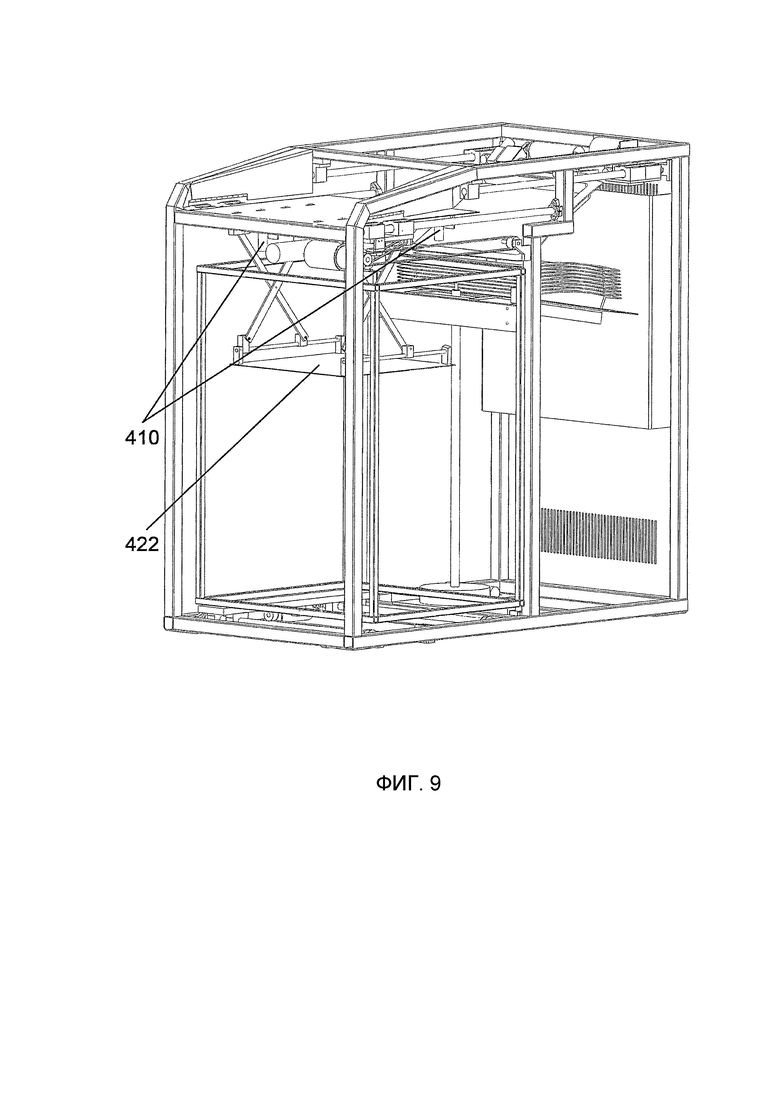
Фиг. 9. Детализированный вид устройства распознавания уровня отходов и пресса для отходов
Фиг. 10. Детализированный вид примера осуществления устройства транспортировки подносов
Фиг. 11. Детализированный вид устройства обработки подноса
Фиг. 12. Детализированный вид устройства сжатия (пресса для отходов) - вид сверху сбоку
Фиг. 13. Детализированный вид устройства сжатия (пресса для отходов) - вид снизу
Фиг. 14. Расположение микровыключателей в устройстве для удаления отходов
Фиг. 15. Разрез системы удаления отходов
Фиг. 16. Детализированный вид устройства сбора подносов, собирающего подносы под устройством для удаления отходов
Фиг. 17. Детализированный вид сварочного устройства для запечатывания мешков
Фиг. 18. Детализированный вид механизма для сброса мешков в вертикальный канал
ПЕРЕЧЕНЬ ССЫЛОЧНЫХ ОБОЗНАЧЕНИЙ, ИСПОЛЬЗУЕМЫХ НА ЧЕРТЕЖАХ
100 - устройство для удаления отходов
102 - передний отсек
104 - задний отсек (отсек для хранения подносов)
110 - поднос
200 - устройство приема подноса;
210 - инфракрасный датчик для распознавания руки
212 – переключатель
220 - платформа для приема подноса;
246 - устройство направления подноса,
248 - колесо для транспортировки подноса
249 - вал колеса для транспортировки подноса
250 - приводной ремень
254 - шкив
256 - опора колес
258 - электродвигатель для колес транспортировки подносов
282 - направляющая платформы
283 - опора направляющей платформы
284 - подшипник платформы
286 - приводной ремень платформы
288 - устройство зацепления приводного ремня платформы и подшипника платформы
290 - шкив платформы
292 - шкив электродвигателя платформы
300 - устройство обработки подноса;
310 - зажим;
312 - нижний зажим
314 - верхний зажим
316 - вал зажима
320 - устройство распознавания положения
322 - устройство распознавания подноса
340 - устройство встряхивания
342 - электродвигатель поворота зажима
344 - электродвигатель закрытия / открытия зажимов
346 - коническая шестерня
360 - устройство горизонтальной транспортировки зажима,
362 - первое положение устройства горизонтальной транспортировки зажима
364 - второе положение устройства горизонтальной транспортировки зажима
400 - приемник для удаления отходов
410 - устройство распознавания уровня отходов
420 - устройство сжатия (пресс для отходов)
422 - пластина
424 - верхняя сторона пластины
426 - нижняя сторона пластины
430 - комплект рычагов ножничного типа
432 - точка опоры
434 - первый рычаг
436 - второй рычаг
440 - нижний ползун
442 - линейная направляющая с закрытыми концами, установленная на верхней стороне пластины
444 - линейные направляющие с закрытыми концами, установленные на устройстве приема подноса
446 - верхний ползун
450 - устройство зацепления
460 - шпиндель
462 - опора шпинделя
464 - электродвигатель шпинделя
470 - линейная боковая направляющая приемника
472 - электродвигатель для удаления приемника
474 - приводной ремень приемника
476 - каркас
480 - устройство удаления приемника
500 - устройство хранения подносов
510 - основание для сбора подносов
512 - линейная направляющая подъемного устройства
514 - подшипник подъемного устройства
530 - подъемное устройство
532 - шпиндель подъемного устройства
534 - двигатель подъемного устройства с понижающим редуктором
550 - устройство определения количества подносов
600 - дисплей
610 - блок управления с блоком питания
800 - система удаления отходов
810 - горизонтальный туннель
812 - отверстие горизонтального туннеля
820 - вертикальный туннель
822 - отверстие вертикального туннеля
830 - устройство сбора подносов
832 - подъемная платформа ножничного типа
840 - контейнер
842 - мешок
850 - нижний двигатель
852 - опора нижнего двигателя
854 - нижний ремень
856 - нижняя осевая опора
858 - нижний линейный подшипник
860 - дверца в виде платформы
862 - нижняя линейная направляющая
864 - устройство зацепления нижнего ремня и нижней линейной направляющей
866 - основание нижней осевой опоры
868 - прутковое сварочное устройство
870 - двигатель сварочного устройства
874 - устройство зацепления сварочного устройства
876 - линейный подшипник сварочного устройства
878 - ремень сварочного устройства
880 - линейная направляющая сварочного устройства.
РАСКРЫТИЕ ПРЕДПОЧТИТЕЛЬНЫХ ПРИМЕРОВ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
Раскрытое устройство для удаления отходов содержит, по существу, два синхронизированных блока: передний отсек 102, в котором происходит прием, захват и опорожнение подносов, и задний отсек 104, в котором происходит транспортировка и укладка подносов на хранение. Наиболее подходящие подносы - прямоугольные с бортиком, обычно используемые в ресторанах быстрого питания или столовых. Устройство 100 для удаления отходов начинает работать после того, как на платформу 220 для приема подноса будет установлен поднос 110. Устройство 322 распознавания подноса, обычно представляющее собой инфракрасные датчики, определяет, что поднос 110 находится на платформе 220 для приема подноса, после чего активируются восемь колес 248 для транспортировки подноса, направляющие поднос 110 к устройству 300 обработки подноса. Эти колеса приводятся в движение валом 249 колес для транспортировки подносов и входят в состав устройства 200 приема подноса. Если поднос 110 не лежит прямо, необходимо отрегулировать положение подноса 110 таким образом, чтобы он достиг зажима 310 в горизонтальном положении в устройстве 300 обработки подноса в перпендикулярной ориентации, в результате чего зажим 310 захватывает поднос 110 нижним зажимом 312 и верхним зажимом 314, в результате чего поднос 110 остается надежно захваченным зажимом 310 и не может отделиться от зажима 310 во время последующего процесса опорожнения подноса. Регулировка подноса осуществляется с помощью восьми колес 248 для транспортировки подноса или с помощью листов, закрепленных по бокам конструкции устройства и служащих устройством направления подноса, при этом листы сужают проход в сторону устройства 300 обработки подноса. Колеса 248 для транспортировки подносов установлены на опоре 256 колес, удерживающей шкив 254 и приводной ремень 250, используемый для привода колес 248, с электроприводом колес транспортировки подносов в качестве основного источника вращения колес.
Если поднос 110 установлен на платформу 220 для приема подноса таким образом, что устройство 322 распознавания подноса, в качестве которого обычно применяют инфракрасные датчики с линзой, обнаруживает, что положение не регулируется ни колесами 248 для транспортировки подноса, ни боковыми листами, служащими устройством 246 направления подноса, то информация о таком положении выводится на дисплей 600, и возникает необходимость в ручной регулировке. Если поднос 110 находится в правильном положении и не обнаружено механических препятствий, колеса 248 для транспортировки подноса инициируют движение подноса 110 вперед, при этом его бортик входит в зажим 310. В устройстве 300 обработки подноса рядом с зажимом 310 находится устройство 320 распознавания положения, которое определяет, что поднос 110 вошел в зажим 300; в стандартном примере осуществления в качестве устройства 320 распознавания положения используют два микровыключателя, один на левой стороне зажима 300, а другой на правой стороне зажима. Для закрытия зажима 300 оба микровыключателя должны распознать наличие подноса 110. Зажим закрывается электродвигателем 344 для закрытия/открытия зажима.
Как только поднос 110 захватывается зажимом 310, начинается автоматический цикл. После того, как поднос 110 захвачен зажимом 310, зажим 310 самостоятельно поднимает поднос 110 примерно на 10 мм относительно платформы 220 для приема подноса. Этот этап необходим для физического отделения подноса 110 от платформы 220 для приема подноса. Указанная платформа 220 содержит опору 283 направляющей платформы, приводной ремень платформы и устройство зацепления 288 подшипников платформы, шкив 290 платформы, шкив 292 электродвигателя платформы и электродвигатель шкива платформы. После подъема подноса 110 активируется следующий этап перемещения платформы 220 для приема подноса в отсек 104 для хранения подносов, в результате чего открывается пространство для опорожнения и встряхивания подноса, что приводит к соскальзыванию отходов с подноса 110 в приемник 400 для удаления отходов. Платформу 220 для приема подноса перемещают на подшипниках 284 платформы, перемещающихся по двум линейным направляющим 282 платформы с помощью систем управления перемещением с детекторами замедления. Это линейное перемещение происходит между передним отсеком 102 и задним отсеком 104. После того, как платформа 220 для приема подноса достигнет своего конечного положения в заднем отсеке 104, зажим 310 поворачивается вместе с подносом 110, захваченным зажимом 310, и встряхивают устройством 340 встряхивания вокруг вала 316 зажима. В одном из примеров осуществления устройство встряхивания реализовано посредством электродвигателя 342 поворота зажима и приводного ремня 250, управляемого программируемым логическим контроллером (ПЛК). Устройство 340 встряхивания также содержит коническую шестерню 346. Наилучшим положением для выгрузки отходов с подноса 110 считают поворот подноса 110 на 80°, когда под действием силы тяжести все предметы падают в приемник для удаления отходов. В конечном итоге при встряхивании предметы, каким-то образом прилипшие к подносу 110, т.е. мокрая бумага на поверхности подноса 110, удаляются с подноса.
После встряхивания подноса 110 зажим 310 с подносом 110 поворачивается в исходное положение, оставляя его на 10 мм выше платформы 220 для приема подноса. По достижении указанного исходного положения, соответствующего первому положению 362 устройства горизонтальной транспортировки зажима, платформа 220 для приема подноса перемещается назад из заднего отсека 104 в передний отсек 102. Устройство 360 горизонтальной транспортировки зажима транспортирует зажим 310 вместе с подносом 110 в задний отсек 104, в котором расположено устройство 500 хранения подносов. При достижении второго положения 364 устройства горизонтальной транспортировки зажима зажим 310 слегка поворачивается вниз, и поднос 110 высвобождается из зажима 310, в результате чего поднос 110 падает на основание 510 для сбора подносов. Устройство 500 хранения подносов содержит основание 510 для сбора подносов, установленное на подъемном устройстве 530, опускающем вертикальное положение этого основания 510 для сбора подносов каждый раз, когда на нее ставят новый поднос 110 (подносы устанавливают друг на друга до тех пор, пока не будет достигнуто заданное количество, наилучшие результаты были достигнуты, когда на хранение было уложено примерно 80 подносов, большее количество подносов означает повышение нагрузки на подъемное устройство 530, что потребует более прочной конструкции устройства для удаления отходов). Подъемное устройство содержит линейную направляющую 512 подъемного устройства, подшипник 514 подъемного устройства, шпиндель 532 подъемного устройства и двигатель 534 подъемного устройства с понижающим редуктором.
По достижении полного заполнения устройство 550 определения количества подносов обнаруживает, что места для нового собираемого подноса 110 больше нет, и соответствующее сообщение отображается на дисплее 600. Для продолжения использования необходимо извлечь собранные подносы из устройства для удаления отходов.
Отходы удаляют в приемник 400 для удаления отходов, который обычно представляет собой контейнер, но может быть и пластиковым мешком. В подходящем месте внутри устройства 100 для удаления отходов установлено устройство 410 распознавания уровня отходов, обычно в виде двух инфракрасных датчиков уровня, которое отслеживает, заполнен ли приемник 400 отходами, и если да, на дисплей 600 выводится сигнал о необходимости опорожнить приемник 400, при этом появляется соответствующее сообщение, и устройство для удаления отходов прекращает работу в связи с необходимостью удалить собранные отходы.
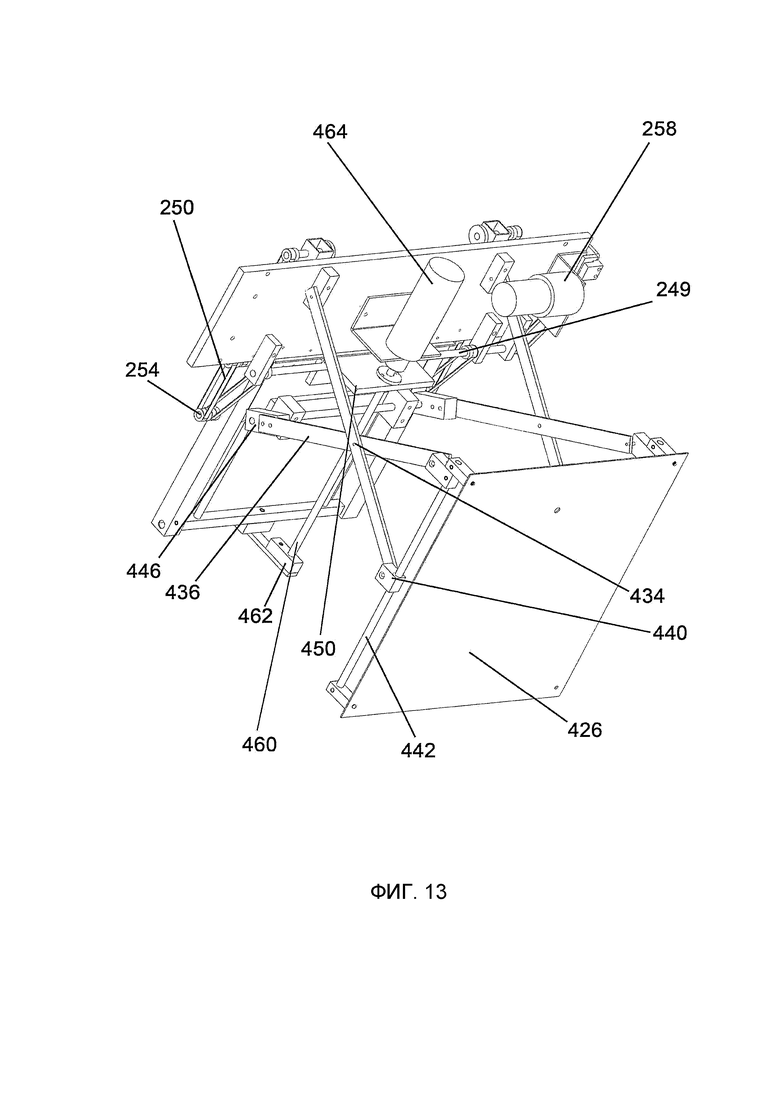
Для достижения соответствующего уровня экономии, особенно пространства, в переднем отсеке 102, под платформой 220 для приема подноса и над приемником 400 расположены устройства 420 сжатия с функцией прессования (уплотнения) отходов в приемнике 400 для уменьшения объема отходов. Пресс 420 для отходов начинает работу, когда уровень отходов в приемнике составляет 60% и более, что является пороговым значением для активации указанного пресса 420 для отходов (устройства сжатия). Когда уровень отходов достигает указанного порогового значения, активируется устройство 420 сжатия и отходы в приемнике уплотняются пластиной 422, имеющей верхнюю сторону 424 и нижнюю сторону 426. Пластину 422 опускают вниз посредством комплекта рычагов 430 ножничного типа, управляемых шпинделем 460, который приводится в действие в двух направлениях электродвигателем 464 шпинделя. Шпиндель 460, прикрепленный к конструкции устройства 100 посредством опоры 462 шпинделя, содержит устройство 450 зацепления, преобразующее вращение шпинделя, в зависимости от направления вращения, в перемещение вперед (рычаги ножничного типа закрываются, что означает подъем пластины 422) или назад (рычаги ножничного типа открываются, что означает опускание пластины 422). Из-за сопротивления, вызванного сжатием отходов, электродвигатель 464 потребляет дополнительный ток, чтобы продолжать толкать пластину 422. Это увеличение тока распознается, электродвигатель 464 шпинделя останавливается и режим его вращения изменяется, вследствие чего пластина 422 поднимается вверх.
В одном примере осуществления устройство 420 сжатия содержит пластину 422, имеющую верхнюю сторону 424 и нижнюю сторону 426, причем пластина 422 расположена горизонтально; кроме того, оно содержит два комплекта рычагов 430 ножничного типа, каждый из которых содержит точку 432 опоры и два рычага 434, 436, при этом первый рычаг 434 и второй рычаг 436 закреплены в точке 432 опоры в середине каждого рычага 434, 436 таким образом, чтобы первый рычаг 434 можно было поворачивать относительно второго рычага 436, при этом каждый рычаг 434, 436 имеет первый и второй конец, причем первый конец находится рядом с пластиной 422; кроме того, оно содержит два нижних ползуна 440, каждый из которых прикреплен к первому концу каждого первого рычага 434, и две линейные направляющие 442 с закрытыми концами, параллельно установленные на верхней стороне пластины, две линейные направляющие 444 с закрытыми концами, параллельно установленные на устройстве приема подноса, два верхних ползуна 446, каждый из которых прикреплен ко второму концу каждого второго рычага 436, шпиндель 460, электродвигатель 464 шпинделя и устройство 450 зацепления, причем пластина 422 прикреплена к двум комплектам рычагов 430 ножничного типа, то есть верхняя сторона 424 пластины ориентирована в направлении первого конца каждого рычага. В этом примере осуществления изобретения каждый нижний ползун 440 установлен на каждой линейной направляющей, установленной на верхней линейной направляющей 442, таким образом, что эти ползуны 440 могут скользить по этой линейной направляющей 442 вместе с концом рычага между концами этой линейной направляющей, и причем каждый верхний ползун 446 установлен на каждой линейной направляющей 444, установленной на устройстве приема подноса, таким образом, что эти верхние ползуны 446 могут скользить по этой линейной направляющей 444 вместе с концом рычага между концами этой линейной направляющей. Верхние ползуны 446 перемещают с помощью устройства 450 зацепления, причем при активированном устройстве 450 зацепления верхние ползуны 446 перемещают параллельно в направлении, определяемом вращением шпинделя 460, приводимого от электродвигателя 464 шпинделя, что позволяет перемещать пластину 422 вертикально вверх или вниз, поэтому пластина 422 может перемещаться в вертикальном направлении вверх или вниз в зависимости от необходимости в прессовании отходов в приемнике 400 для удаления отходов, то есть пластина 422 движется вниз при прессовании или вверх при возврате в свое исходное положение.
Когда приемник 400 заполнен, и сжатие отходов более невозможно, на дисплее 600 появляется сообщение о том, что для продолжения работы необходимо опорожнить приемник 400. В одном из примеров осуществления изобретения приемник 400 после заполнения автоматически извлекают из устройства для удаления отходов. Обычно приемник помещают в каркас 476, надежно удерживающий приемник 400 в устройстве для удаления отходов, а также тогда, когда электродвигатель 472 для удаления приемника приводит в движение приводной ремень 474 приемника, преобразующий вращение в горизонтальное перемещение по линейной боковой направляющей 470 приемника, в результате чего каркас 476 скользит в направлении, определяемом направлением вращения электродвигателя 472. Когда каркас 476 выходит из устройства 100 для удаления отходов, заполненный приемник 400 опорожняют вручную или заменяют на пустой приемник.
Для обеспечения максимального уровня безопасности, в частности, человека, ставящего поднос 110 на платформу 220 для приема подноса, предусмотрено несколько датчиков, распознающих присутствие рук в зоне действия подвижных частей устройства 100. Наиболее важным является инфракрасный датчик 210 распознавания рук, который охватывает начальную часть платформы 220, то есть место, где находятся руки человека, подающего поднос 110. Этот ИК-датчик 210 выполнен по схеме нормально замкнутого датчика, что означает, что в случае разрыва цепи этого ИК-датчика устройство 110 не будет работать. Соответствующее сообщение об ошибке будет выведено на дисплей 600.
Наиболее важной частью работы устройства 100 является момент, в который платформу 220 для приема подноса возвращают из заднего отсека 104 в передний отсек 102 в положение для приема нового подноса 110. Помимо установленных ИК-датчиков 210 для распознавания рук предусмотрена дополнительная защита, реализованная проскальзыванием приводного ремня 286 платформы при возникновении непредвиденной нагрузки.
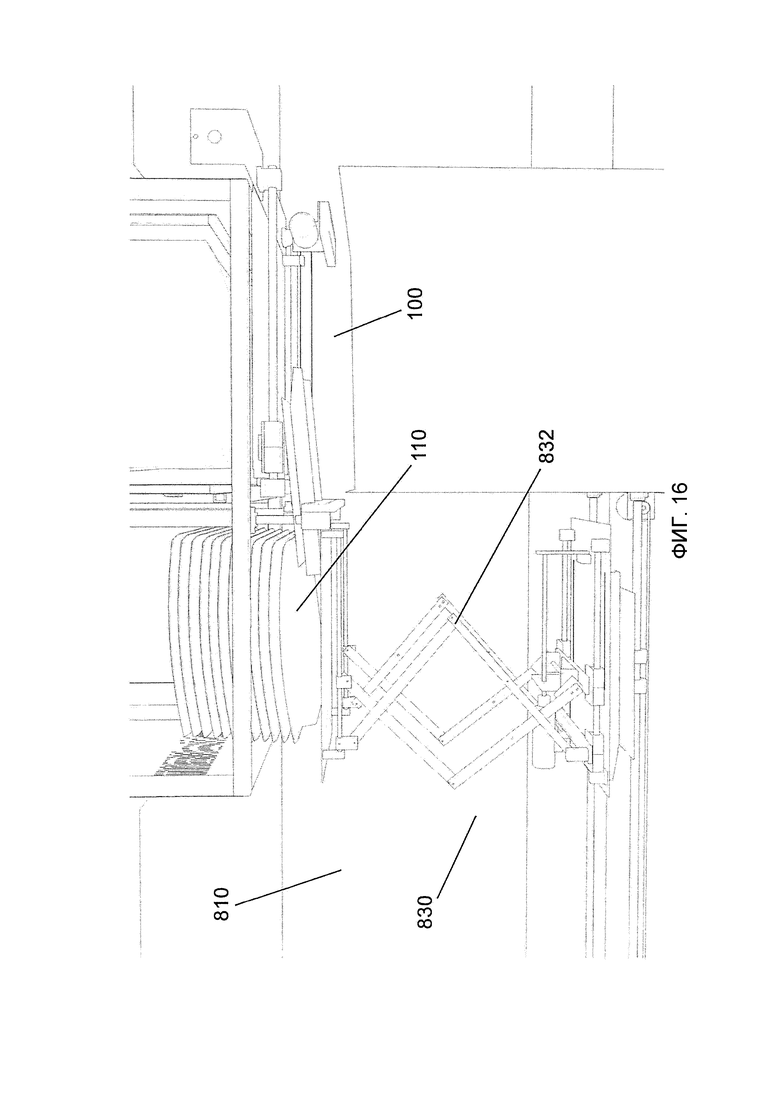
Кроме того, автор изобретения разработал комплексную систему 800 удаления отходов, содержащую в наилучшем примере, по меньшей мере, одно устройство 100 для удаления отходов, по меньшей мере, один горизонтальный туннель 810, по меньшей мере, один вертикальный туннель 820 и, по меньшей мере, одно устройство 830 сбора подносов, расположенное таким образом, чтобы каждый вертикальный туннель 820 пересекал под прямым углом каждый горизонтальный туннель 810. Предусмотрено отверстие 812 горизонтального туннеля, подходящее для перемещения подносов 110 от устройства для удаления отходов к устройству 830 сбора подносов, и предусмотрено отверстие 822 вертикального туннеля, подходящее для введения пластиковых мешков 842 в вертикальный туннель 820. Во время работы и при достижении максимального уровня отходов в устройстве 100 для удаления отходов или при достижении максимального количества подносов 110 в устройстве 500 хранения подносов, устройство 100 для удаления отходов размещают над отверстием 822 вертикального туннеля таким образом, чтобы передний отсек 102 находился над вертикальным туннелем 820, а задний отсек 104 находился над горизонтальным туннелем 810. В данном изобретении приемник 400 для удаления отходов представляет собой мешок 842. По меньшей мере, одно устройство 830 сбора подносов перемещают горизонтально в пределах горизонтального туннеля 810 от вертикального туннеля 820 к месту опорожнения этого устройства 830 сбора подносов. После заполнения мешка 842 отходами этот мешок 842 удаляют из устройства 100 через вертикальный туннель и/или, если устройство 500 хранения подносов заполнено подносами 110, устройство 830 сбора подносов забирает эти подносы 110 и транспортирует их к месту опорожнения.
В обычном применении устройство 830 сбора подносов представляет собой подъемную платформу 832 ножничного типа с электроприводом. Кроме того, в другом примере осуществления эта система дополнительно содержит контейнер 840, расположенный под вертикальным туннелем 820, так что каждый мешок 842 из устройства 100 для удаления отходов под действием силы тяжести падает в указанный контейнер 840, как подробно показано на фиг. 17. На фиг.18 в следующем примере осуществления представлено устройство для запечатывания мешка 842 и сброса мешка 842, наполненного отходами, из устройства 100 для удаления отходов. Механизм для сброса мешка 842 содержит нижний двигатель 850, опору 852 нижнего двигателя, нижний ремень 854, нижние направляющие 862, по которым скользят нижние линейные подшипники 858. Нижние линейные направляющие 862 установлены на конструкцию устройства 100 для удаления отходов посредством нижних осевых опор 856, прикрепленных к основанию 866 нижней осевой опоры. Указанный двигатель 850 отвечает за перемещение дверец 860 в виде платформы. Передача движения между нижним ремнем 854 и линейной направляющей 858 осуществляется через устройство 864 зацепления нижнего ремня и нижней линейной направляющей. Перед удалением пластиковый мешок 842 запечатывают путем сварки прутковым сварочным устройством 868. Затем дверцу 860 в виде платформы открывают, и мешок 842 под действием силы тяжести падает через вертикальный канал 820 в контейнер 840. Дверцу 860 в виде платформы переводят в исходное положение, и устройство 100 для удаления отходов готово к продолжению работы. Запечатывание мешков сваркой гарантирует, что вертикальный канал 820 останется чистым после прохождения мешка 842 по вертикальному каналу 820.
Когда устройство 410 распознавания уровня отходов определяет, что в мешке больше нет пустого пространства, отверстие мешка запечатывают прутковым сварочным устройством 868. Устройство для запечатывания мешков содержит прутковое сварочное устройство 868, два двигателя 870 сварочного устройства, линейные направляющие 880 сварочного устройства, ремни 878 сварочного устройства, устройство 874 зацепления сварочного устройства и линейные подшипники 876 сварочного устройства.
Два двигателя 870 сварочного устройства приводят в движение ремни 878 сварочного устройства, которые с помощью устройства 874 зацепления сварочного устройства перемещают линейные подшипники 876 сварочного устройства, скользящие по линейным направляющим 880 сварочного устройства. Прутковое сварочное устройство 868 установлено на линейных подшипниках 876 сварочного устройства, поэтому в зависимости от управляемого направления вращения двигателя прутковое сварочное устройство 868 закрывается или открывается. В закрытом состоянии мешок запечатывают сваркой.
Подносы обычно собирают в устройстве 500 хранения подносов, расположенных точно на основании 510 для сбора подносов. После обнаружения максимального количества подносов на основании 510 для сбора подносов это основание отводят в сторону, и подносы соскальзывают на подъемную платформу 832 ножничного типа. Детектор, расположенный на подъемной платформе 832 ножничного типа, распознает наличие подносов на платформе, поэтому платформа начинает автоматически опускаться вместе с подносами.
Одновременно основание 510 для сбора подносов возвращается в исходное положение в заднем отсеке 104, после чего устройство 100 для удаления отходов готово к использованию. Параллельно в горизонтальном туннеле 810 датчик определяет, что ножницы подъемной платформы 832 ножничного типа опущены, и что эта подъемная платформа 832 ножничного типа была транспортирована вместе с подносами 110 через горизонтальный туннель. В месте, в котором подъемная платформа 832 ножничного типа достигает своего конечного положения в горизонтальном тоннеле, предусмотрен датчик, определяющий, что подъемная платформа 832 ножничного типа достигла своего конечного положения, вследствие чего двигатель, приводящий в действие подъемную платформу 832 ножничного типа, выключается. В этом конечном положении подъемная платформа 832 ножничного типа поднимает подносы 110 на высоту, предварительно определенную датчиком. По достижении указанной высоты подъемная платформа 832 ножничного типа останавливается, и оператор может снять подносы 110 с подъемной платформы 832 ножничного типа. Пока подносы не сняты, подъемная платформа 832 ножничного типа остается в этом положении. После снятия последнего подноса (подъемная платформа ножничного типа пуста) датчик определяет отсутствие подноса, и подъемная платформа 832 ножничного типа опускается. После того, как будет распознано закрытое положение подъемной платформы 832 ножничного типа, подъемную платформу 832 ножничного типа начинают перемещать в сторону устройства 100 для удаления отходов, в итоге, к устройству, заполненному подносами. Цикл повторяют.
Надежность этой системы и устройства для удаления отходов очень высока благодаря простой автоматике и используемым датчикам. Каждое линейное перемещение защищено устройствами отключения в конечном положении, также предусмотрены датчики для определения вертикального положения подъемника ножничного типа или горизонтального положения подъемной платформы ножничного типа.
Все детекторы подключены к ПЛК, который контролирует и управляет работой устройства 100 для удаления отходов.
ПЛК управляет электродвигателями и целым рядом оптических датчиков и микровыключателей 212. На дисплее, подключенном к ПЛК, предусмотрено отдельное меню с режимом технического обслуживания, позволяющим проверить функциональность каждой части машины. Наилучшее решение заключается в использовании дисплея 600 с сенсорным экраном, на котором, по меньшей мере, отображаются сообщения, состояние хранения подноса и уровень заполнения приемника для удаления отходов. Связь между дисплеем и ПЛК осуществляется по промышленному протоколу MODBUS, что обеспечивает максимальную эксплуатационную надежность. Блок управления с источником 610 питания расположен в заднем отсеке 104.








Группа изобретений относится к области устройств для удаления отходов, используемых в ресторанах быстрого питания, торговых центрах, столовых и иных подобных объектах, а также к системе, содержащей несколько данных устройств. Устройство для удаления отходов, предназначенное для приема подносов, содержит устройство приема подноса, устройство обработки подноса, приемник для удаления отходов и устройство хранения подносов. Указанные устройства собраны таким образом, чтобы при работе устройства для удаления отходов устройство приема подноса принимало поднос, транспортируемый к устройству обработки подноса, удаляющему отходы с подноса в приемник для удаления отходов, после чего указанный поднос укладывается на хранение в устройство хранения подносов. Причем устройство приема подноса содержит, по меньшей мере, два инфракрасных датчика для обнаружения руки, платформу для приема подноса, устройство регулировки подноса, устройство транспортировки подноса. При этом во время работы устройства для удаления отходов, по меньшей мере, два инфракрасных датчика показывают отсутствие руки вблизи устройства приема подноса, и когда поднос установлен на платформу для приема подноса, поднос автоматически устанавливается устройством регулировки подноса в такое положение, которое позволяет транспортировать поднос устройством транспортировки подноса к устройству обработки подноса. Достигаемый технический результат заключается в создании устройства, которое будет отличаться автоматизацией, безопасностью использования, эксплуатационной надежностью и высоким качеством работы, а также повышении эффективности удаления отходов и обработки подносов. 2 н. и 12 з.п. ф-лы, 19 ил.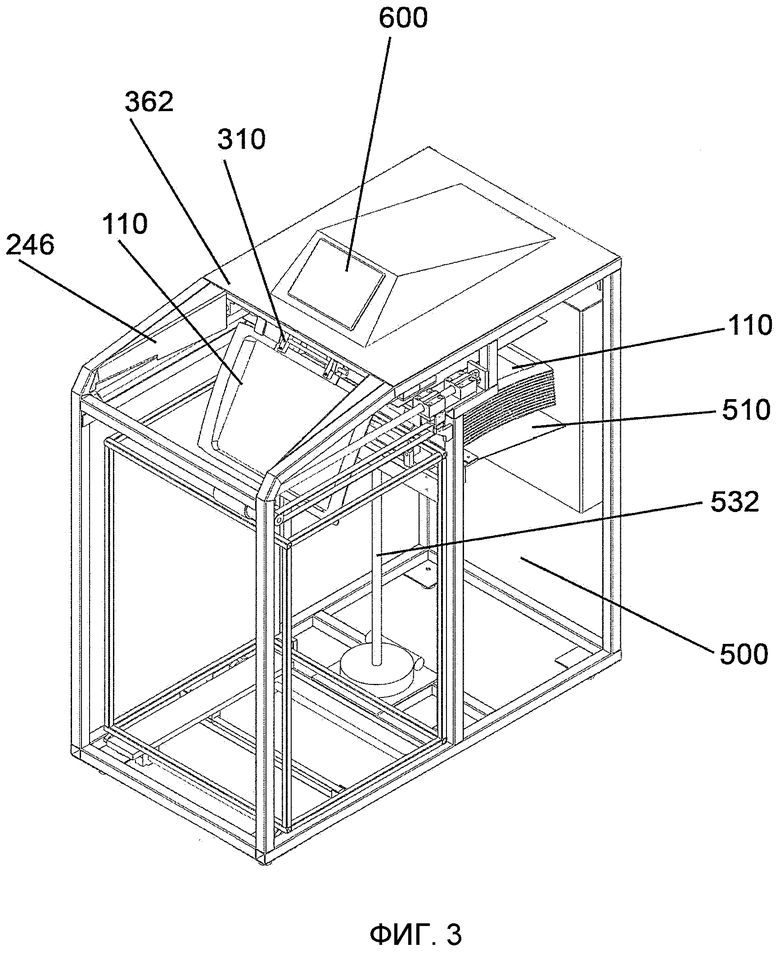
1. Устройство (100) для удаления отходов, предназначенное для приема подносов и содержащее:
устройство (200) приема подноса;
устройство (300) обработки подноса;
приемник (400) для удаления отходов и
устройство (500) хранения подносов,
собранные таким образом, чтобы при работе устройства (100) для удаления отходов устройство (200) приема подноса принимало поднос (110), транспортируемый к устройству (300) обработки подноса, удаляющему отходы с подноса (110) в приемник (400) для удаления отходов, после чего указанный поднос (110) укладывается на хранение в устройство (500) хранения подносов,
при этом устройство (200) приема подноса содержит:
по меньшей мере, два инфракрасных датчика (210) для обнаружения руки;
платформу (220) для приема подноса;
устройство регулировки подноса;
устройство транспортировки подноса,
при этом во время работы устройства (100) для удаления отходов, по меньшей мере, два инфракрасных датчика (210) показывают отсутствие руки вблизи устройства (200) приема подноса, и когда поднос (110) установлен на платформу (220) для приема подноса, поднос (110) автоматически устанавливается устройством регулировки подноса в такое положение, которое позволяет транспортировать поднос (110) устройством транспортировки подноса к устройству (300) обработки подноса.
2. Устройство (100) для удаления отходов по п. 1, отличающееся тем, что устройство регулировки подноса содержит:
устройство (246) направления подноса и
устройство (322) распознавания подноса,
при этом устройство (322) распознавания подноса предназначено для определения того, находится ли поднос (110) на платформе (220) для приема подноса, и при этом устройство (246) направления подноса автоматически направляет поднос (110) в положении, позволяющем транспортировать поднос (110) к устройству (300) обработки подноса.
3. Устройство (100) для удаления отходов по п. 2, отличающееся тем, что устройство (246) направления подноса реализовано с использованием двух листов, закрепленных с каждой стороны конструкции устройства (100) и сужающих платформу в направлении устройства (300) обработки подноса, и устройство (322) распознавания подноса реализовано с использованием инфракрасных датчиков и микровыключателей.
4. Устройство (100) для удаления отходов по любому из предыдущих пунктов, отличающееся тем, что устройство (300) обработки подноса содержит:
зажим (310);
устройство (320) распознавания положения;
устройство (340) встряхивания и
устройство (360) горизонтальной транспортировки зажима,
при этом во время работы устройства (100) для удаления отходов устройство (360) горизонтальной транспортировки зажима перемещается между первым положением (362) и вторым положением (364), или занимает одно из этих положений, и при этом открытый зажим (310) принимает поднос (110) из устройства (200) приема подноса, когда устройство (360) горизонтальной транспортировки зажима находится в первом положении (362), и при этом зажим (310) закрывается, когда устройство (320) распознавания положения обнаруживает, что поднос (110) находится в зажиме (310), причем указанный поднос (110) находится, по существу, в горизонтальном положении, и при этом поднос (110), захваченный зажимом (310), поднимается вместе с зажимом (310) примерно на 10 мм таким образом, чтобы платформа (220) для приема подноса перемещалась из своего первого положения в свое второе положение относительно зажима (310), освобождая пространство для поворота зажима (310) и подноса (110), после чего поднос (110) поворачивается вместе с упомянутым зажимом (310) вниз в наклонное положение, вследствие чего отходы с подноса (110) попадают в приемник (400) для удаления отходов, расположенный под зажимом (310), и при этом поднос (110) находится в указанном положении, устройство встряхивания (340) встряхивает поднос (110) и после встряхивания подноса зажим (310) вместе с подносом (110) поворачивается обратно, вследствие чего поднос (110) достигает своего первоначального горизонтального положения, будучи поднятым примерно на 10 мм вместе с зажимом (310), при этом платформа (220) для приема подноса перемещается назад из ее второго положения в ее первое положение, и когда платформа (220) для приема подноса достигает своего первого положения, устройство (360) горизонтальной транспортировки зажима перемещает поднос (110), захваченный зажимом (310), к устройству (500) хранения подносов.
5. Устройство (100) для удаления отходов по любому из предыдущих пунктов, отличающееся тем, что устройство (500) хранения подносов содержит:
основание (510) для сбора подносов;
подъемное устройство (530) и
устройство (550) определения количества подносов,
при этом во время работы устройства (100) для удаления отходов поднос (110) из устройства (300) обработки подноса помещается на основание (510) для сбора подносов, подъемное устройство (530) опускает это основание вниз до положения, определяемого устройством (550) определения количества подносов, в результате чего новый поднос (110) может оказаться сверху подноса, уже находящегося на основании (510) для сбора подносов, подносы (110) складываются на основание (510) для сбора подносов друг на друга до уровня, при котором устройство (550) определения количества подносов обнаруживает, что максимальное количество подносов на основании (510) для сбора подносов достигнуто.
6. Устройство для удаления отходов по любому из предыдущих пунктов, дополнительно содержащее:
устройство (410) распознавания уровня отходов;
устройство (420) сжатия (пресс для отходов);
устройство (480) удаления приемника,
при этом устройство (410) распознавания уровня отходов определяет уровень отходов в приемнике (400) для удаления отходов, и если уровень отходов достигает порогового значения, составляющего 60% и более, устройство (420) сжатия сжимает эти отходы, причем после распознавания заполнения приемника (400) для удаления отходов указанный приемник удаляется из устройства (100) для удаления отходов посредством устройства (480) удаления приемника.
7. Устройство для удаления отходов по п. 6, отличающееся тем, что устройство (420) сжатия содержит:
пластину (422), имеющую верхнюю сторону (424) и нижнюю сторону (426), причем пластина (422) располагается горизонтально;
два комплекта рычагов (430) ножничного типа, каждый из которых имеет точку (432) опоры и два рычага (434, 436), причем первый рычаг (434) и второй рычаг (436) закреплены в точке (432) опоры в середине каждого рычага (434, 436) таким образом, чтобы первый рычаг (434) можно было поворачивать относительно второго рычага (436), при этом каждый рычаг (434, 436) имеет первый и второй конец, причем первый конец прилегает к пластине (422);
два нижних ползуна (440), каждый из которых прикреплен к первому концу каждого первого рычага (434);
две линейные направляющие (442) с закрытыми концами, параллельно установленные на верхней стороне пластины;
две линейные направляющие (444) с закрытыми концами, параллельно установленные на устройстве приема подноса;
два верхних ползуна (446), каждый из которых прикреплен ко второму концу каждого второго рычага (436);
шпиндель (460);
электродвигатель (464) шпинделя и
устройство (450) зацепления,
при этом пластина (422) прикреплена к двум комплектам рычагов (430) ножничного типа, то есть верхняя сторона (424) пластины ориентирована в направлении первого конца каждого рычага;
при этом каждый нижний ползун (440) установлен на каждой линейной направляющей, установленной на верхней стороне пластины (442), таким образом, чтобы этот ползун (440) мог скользить по этой линейной направляющей (442) вместе с концом рычага между концами этой линейной направляющей, и при этом каждый верхний ползун (446) установлен на каждой линейной направляющей (444), установленной на устройстве приема подноса, таким образом, чтобы этот ползун (446) мог скользить по этой линейной направляющей (442) вместе с концом рычага между концами этой линейной направляющей, причем верхние ползуны (446) перемещаются посредством устройства (450) зацепления, причем при активированном устройстве (450) зацепления верхние ползуны (446) перемещаются параллельно в направлении, определяемом вращением шпинделя (460), приводимого в движение электродвигателем (464) шпинделя, что позволяет перемещать пластину (422) вертикально вверх или вниз, поэтому пластина (422) может перемещаться в вертикальном направлении вверх или вниз в зависимости от необходимости в прессовании отходов в приемнике (400) для удаления отходов, то есть пластина (422) движется вниз при прессовании или вверх при возврате в свое исходное положение.
8. Устройство для удаления отходов по любому из предыдущих пунктов, дополнительно содержащее:
блок управления (610) с блоком питания и
дисплей (600),
при этом блок управления представляет собой программируемый логический контроллер (ПЛК), причем ПЛК управляет всеми операциями устройства для удаления отходов, и при этом все сообщения о состоянии устройства для удаления отходов отображаются на дисплее (600).
9. Устройство для удаления отходов по любому из предыдущих пунктов, дополнительно содержащее:
передний отсек (102) и задний отсек (104),
при этом приемник (400) для удаления отходов расположен в переднем отсеке (102), а устройство (500) хранения подносов - в заднем отсеке (104).
10. Система (800) удаления отходов, отличающаяся тем, что она содержит, по меньшей мере, одно устройство (100) для удаления отходов по п. 9, по меньшей мере, один горизонтальный туннель (810) и/или, по меньшей мере, один вертикальный туннель (820), причем горизонтальный туннель (810) подходит для транспортировки подносов, и причем из устройства (100) для удаления отходов можно подавать подносы в горизонтальный туннель (810), и дополнительно из устройства (100) для удаления отходов можно подавать отходы в вертикальный туннель (810).
11. Система (800) удаления отходов по п. 10, отличающаяся тем, что она содержит, по меньшей мере, один горизонтальный туннель (810) и, по меньшей мере, одно устройство (830) сбора подносов, при этом при достижении максимального количества подносов (110) в устройстве (500) хранения подносов устройство (100) для удаления отходов размещено над отверстием (812) горизонтального туннеля таким образом, чтобы задний отсек (104) находился над отверстием горизонтального туннеля (812), и при этом, по меньшей мере, одно устройство (830) сбора подносов имеет возможность перемещаться в горизонтальном направлении внутри горизонтального туннеля (810) от отверстия (812) горизонтального туннеля до места опорожнения указанного устройства (830) сбора подносов, и когда устройство (500) хранения подносов заполнено подносами (110), указанные подносы (110) захватываются устройством (830) сбора подносов, причем указанное устройство (830) сбора подносов транспортирует подносы (110) к месту опорожнения указанного устройства (830) сбора подносов.
12. Система (800) удаления отходов по п. 10 или 11, отличающаяся тем, что она содержит, по меньшей мере, один вертикальный туннель (820), и при этом во время работы каждого устройства (100) для удаления отходов и при достижении максимального уровня отходов в устройстве (100) устройство (100) размещается над отверстием (822) вертикального туннеля таким образом, чтобы передний отсек (102) находился над отверстием (820) вертикального туннеля, и при этом приемник (400) для удаления отходов представляет собой мешок (842), и причем, если мешок (842) наполнен отходами, указанный мешок (842) сначала запечатывают внутри устройства (100), а затем удаляют из устройства (100) через вертикальный туннель.
13. Система (800) удаления отходов по п. 11 или 12, отличающаяся тем, что устройство (830) сбора подносов представляет собой подъемную платформу (832) ножничного типа с электроприводом.
14. Система (800) удаления отходов по п. 12, дополнительно содержащая контейнер (840), расположенный под вертикальным туннелем (820) так, что каждый мешок (842) из устройства (100) для удаления отходов падает в указанный контейнер (840).
| US 7175070 B1, 13.02.2007 | |||
| US 20110280694 A1, 17.11.2011 | |||
| WO 1999000316 A1, 07.01.1999 | |||
| ПЛАНЕТАРНЫЙ ПРОКАТНЫЙ СТАН | 0 |
|
SU175025A1 |

