ПРЕДПОСЫЛКИ ИЗОБРЕТЕНИЯ
[0001] Приоритет данной заявки заявляется по предварительной заявке США №62/842/899, поданной 3 мая 2019 года, описание которой целиком включено в данную заявку посредством ссылки.
[0002] Настоящее изобретение относится к системе, являющейся частью соответствующего грузового транспортного средства или являющейся модернизацией существующего соответствующего грузового транспортного средства. Данная система содержит автоматизированный подъемный узел и определяет способ выгрузки груза из соответствующего грузового транспортного средства, хотя следует понимать, что данная система и способ также могут использоваться для транспортировки и/или погрузки груза в грузовое транспортное средство.
[0003] Грузовые автотранспортные средства хорошо известны в данной области техники. Например, автомобили-фургоны без окон в грузовом отсеке, грузовики и прицепы тягача - все используются для доставки груза из одного местоположения в другое. Как отмечено выше, настоящее изобретение может являться частью исходного грузового транспортного средства или может быть вариантом модернизации для преобразования грузового транспортного средства в автоматизированный/автономный подъемный узел. Само транспортное средство может быть автономным или требующим наличия водителя.
[0004] Быстро растет потребность в грузовых транспортных средствах в связи с доставкой товаров (обычно называемых в данном документе грузом или единицами груза, но которые могут относиться к широкому спектру товаров, контейнеров, упаковок, ящиков и т.д.). Считается, что со временем большая часть из этих транспортных средств будет автономной или полуавтономной (для сокращения человеческого труда или взаимодействия, необходимого для погрузки, выгрузки и транспортировки груза), и могут быть предусмотрены беспилотные грузовые транспортные средства, которые будут забирать груз из первого местоположения (например, предприятия, товарного склада, почтового отделения и т.д.) и транспортировать груз ко второму местоположению (например, почтовому отделению, узлу доставки или промежуточному товарному складу, предприятию, месту жительства и т.д.). Также предполагается, что грузовое транспортное средство может перевозить различные грузы, т.е. весь груз может состоять не из одинаковых предметов (единиц) груза, или из предметов различного типа, размеров, весов и т.д. Следовательно, грузовое отделение грузового транспортного средства, вероятно, будет грузовым отделением, состоящим из нескольких отсеков.
[0005] Грузовое отделение предпочтительно содержит дверь, которая избирательно делает возможным доступ в отделение и, таким образом, делает возможным подачу дополнительного груза в один или несколько отсеков отделения, или удаления груза, размещенного ранее в отсеках отделения. При добавлении груза в отделение или удалении из отделения вдоль заданного маршрута, может возникнуть необходимость в переориентировании груза в различные отсеки отделения. Например, груз, изначально хранимый в одном отсеке отделения, может быть перемещен на маршруте доставки, например, если некоторый груз становится менее доступным и груз, который был подобран или перемещен на маршруте, должен быть передвинут, чтобы закончить поставку в требуемое местоположение.
[0006] Таким образом, существует потребность в улучшенной системе, способе и конструкции, которая обеспечивает по меньшей мере одно или несколько описанных выше свойств, устраняет один или несколько отмеченных недостатков, а также обеспечивает еще другие свойства и преимущества.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0007] Предложена автономная система погрузки или выгрузки для соответствующего транспортного средства.
[0008] Данная система предпочтительно содержит отделение для хранения соответствующего транспортного средства, в котором хранится соответствующий груз в по меньшей мере одном отсеке отделения, в который принимается или из которого подается груз через проем в отделение для хранения. В каждом отсеке отделения расположен конвейер, выполненный с обеспечением помощи при подаче или приеме соответствующего груза в отсек отделения или из него. К отделению для хранения подвижно прикреплен подъемный узел, выполненный с возможностью приема соответствующего груза из отсека отделения для хранения. Подъемный узел содержит конвейер, который принимает соответствующий груз из отсека отделения или подает соответствующий груз в отсек отделения.
[0009] Отделение для хранения может быть разделено на отсеки отделения, например, с образованием группы отсеков по меньшей мере два по высоте на два по ширине (2×2).
[0010] Подъемный узел содержит платформу, принимающую соответствующий груз или подающую соответствующий груз в один из отсеков отделения.
[0011] Предпочтительный монтажный узел прикрепляет с возможностью перемещения подъемный узел к отделению для хранения, при этом монтажный узел содержит первый и второй вертикальные направляющие элементы, расположенные в разнесенных по горизонтали местах отделения для хранения. Первый и второй горизонтальные направляющие элементы расположены в разнесенных по вертикали местах, при этом каждый горизонтальный направляющий элемент имеет первый и второй концы, которые присоединены к вертикальным направляющим элементам и могут перемещаться по вертикали относительно них. Платформа предпочтительно прикреплена к первому и второму горизонтальным направляющим элементам и может перемещаться вдоль них между первым и вторым вертикальными направляющими элементами, благодаря чему платформа может быть расположена у выбранного отсека отделения группы.
[0012] Платформа в первом варианте выполнения имеет первый край, прикрепленный с возможностью поворота ко второму горизонтальному направляющему элементу, благодаря чему обеспечена возможность перемещения платформы между первым вертикальным положением хранения и вторым горизонтальным развернутым положением.
[0013] Имеется по меньшей мере один рычажный механизм, содержащий первое звено и второе звено, причем первый конец первого звена прикреплен к первому горизонтальному направляющему элементу, а первый конец второго звена прикреплен ко второму краю платформы, при этом вторые концы первого и второго звеньев шарнирно соединены друг с другом.
[0014] Желательно платформа с возможностью перемещения установлена на первом и втором горизонтальных элементах так, что она может перемещаться в боковом направлении относительно отсеков отделения.
[0015] Также желательно платформа с возможностью перемещения установлена на первом и втором вертикальных элементах так, что она может перемещаться по вертикали относительно отсеков отделения.
[0016] Монтажный узел может иметь размеры, выбранные так, что платформа может перемещаться к горизонтальному местоположению ниже отсеков отделения.
[0017] Платформа в одном варианте содержит конвейер подъемного узла, функционально связанный с платформой.
[0018] В предпочтительном варианте конвейер подъемного узла содержит первую и вторую секции, разделенные зазором, и по меньшей мере один толкатель, проходящий через зазор и выполненный с возможностью взаимодействия с соответствующим грузом, принятым на платформе, и облегчения перемещения первого компонента соответствующего груза относительно смежного второго компонента соответствующего груза.
[0019] Толкатель установлен для перемещения вместе с первой и второй секциями конвейера.
[0020] В одном варианте выполнения толкатель утяжелен и установлен на платформе, благодаря чему толкатель проходит через зазор и выше поверхности первой и второй секций конвейера, когда толкатель пересекает подъемную платформу от первого края до второго края, и располагается ниже указанной поверхности, когда толкатель пересекает подъемную платформу от второго края до первого края.
[0021] Для контроля перемещения соответствующего груза с конвейера отсека отделения до конвейера подъемного узла может быть обеспечен датчик.
[0022] Система в одном варианте выполнения содержит первый двигатель, функционально связанный с конвейером по меньшей мере одного из отсеков отделения, второй двигатель, функционально связанный с конвейером подъемного узла, и контроллер. Контроллер сообщается с подъемным узлом, монтажным узлом, датчиком, первым двигателем и вторым двигателем для разворачивания и хранения платформы, перемещения платформы между отсеками отделения и под отсеками отделения, контроля положения первого компонента соответствующего груза и в соответствии с указанным контролем управления относительными скоростями конвейеров отсека отделения и конвейера подъемного узла для перемещения первого соответствующего груза на конвейер подъемного узла.
[0023] Также предложен способ погрузки соответствующего груза в соответствующее грузовое транспортное средство или выгрузки соответствующего груза из соответствующего транспортного средства.
[0024] Грузовое транспортное средство содержит устройство отделения для хранения, содержащее отсеки, имеющие размеры, выбранные с обеспечением возможности приема в них груза, первый двигатель, функционально связанный с конвейером по меньшей мере одного из отсеков отделения, причем подъемный узел содержит платформу с конвейером подъемного узла, при этом подъемный узел прикреплен с помощью монтажного узла к устройству отделения для хранения, датчику, второму двигателю, функционально связанный с конвейером подъемного узла и с котроллером. Контроллер сообщается с подъемным узлом, монтажным узлом, датчиком, первым двигателем, функционально связанным с отсеками отделения, и вторым двигателем, функционально связанным с конвейером подъемного узла, и вторым двигателем для разворачивания и хранения платформы, перемещения платформы между отсеками отделения и переноса соответствующего груза из отсека отделения на платформу и/или на поверхность земли.
[0025] Этап переноса включает перемещение соответствующего груза из отсеков отделения на поверхность земли в место под отсеками отделения, например, на поверхность земли.
[0026] Способ может включать определение положения соответствующего груза во время этапа переноса и управление конвейером отсека отделения, а также конвейером подъемного узла, для разделения соответствующих первой и второй единиц груза.
[0027] Этап перемещения включает подъем и опускание платформы между вертикально смещенными отсеками отделения и/или перемещение платформы в боковом направлении между горизонтально смещенными отсеками отделения.
[0028] Способ дополнительно включает перемещение платформы между положением хранения и развернутым положением.
[0029] Этап перемещения платформы включает поворот платформы между вертикальным расположением, определяющим положение хранения, и горизонтальным расположением, определяющим развернутое положение.
[0030] Устройство отделения для хранения дополнительно содержит дверь, а способ дополнительно включает открытие и закрытие двери для обеспечения избирательного доступа в отделение для хранения.
[0031] Другой вариант устройства отделения для хранения может содержать пару опорных направляющих с роликами, которые делают возможным качение груза в грузовое отделение или в отсеки отделения или из них вместо использования конвейеров.
[0032] Направляющие рамки могут совместно действовать с гибкими приводными элементами (например, цепями, тросами или ремнями) для проталкивания груза в отделение или его отсеки или из них.
[0033] Первый и второй двигатели, приводящие в движение первую и вторую направляющие рамки, могут быть управляемыми и преимущественно используются для сжатия или приложения продольной силы сжатия к смежно расположенным единицам груза, принятым между первой и второй направляющими рамками.
[0034] Задняя (например, вторая) направляющая рамка также может быть автоматически перемещена из вертикального положения проталкивания груза в горизонтальное положение образования перемычки, в котором направляющая рамка действует в качестве удлинения для образования перемычки или для переноса груза на платформу с роликов устройства отделения для хранения.
[0035] Избирательное использование задней направляющей рамки в качестве перемычки делает возможным наличие зазора между подъемным узлом и устройством отделения для хранения для размещения подвижной двери, которая делает возможным избирательный доступ в отделение.
[0036] Первое преимущество настоящего изобретения заключается в создании подъемного узла, содержащего платформу, которая перемещается по вертикали вверх и вниз и из стороны в сторону в боковом направлении относительно отделения для хранения.
[0037] Другое преимущество заключается в использовании встроенных конвейеров, связанных с отсеками отделения и с подъемной платформой для перемещения груза в грузовое транспортное средство или из него.
[0038] Еще одно преимущество связано с контроллером, обеспечивающим автономную работу по погрузке и разгрузке груза из грузового транспортного средства, переустановку груза в отдельных отсеках отделения транспортного средства и расположение груза в различных местах на поверхности земли при необходимости.
[0039] Программное обеспечение контролирует потребление тока первым и вторым двигателями, которые приводят в движение, соответственно, первую и вторую направляющие рамки, для определения того, что на единицы груза между направляющими рамками действуют силы сжатия или компрессии.
[0040] Силу сжатия, компрессии, действующую на груз, можно использовать для идеального расположения груза внутри отделения и/или стабилизации груза при ускорении и торможении транспортного средства во время работы транспортного средства.
[0041] Еще другие преимущества настоящего изобретения будут более очевидными из прочтения и понимания нижеследующего подробного описания.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0042] Фиг. 1-23 представляют собой ряд иллюстраций, показывающих разгрузку (и погрузку или временное хранение для транспортировки) груза (продуктов, ящиков, контейнеров с поддонами и без них и т.д.) из соответствующего колесного грузового транспортного средства.
[0043] Фиг. 24 представляет собой вид в аксонометрии контейнера для хранения или отделяемого грузового отсека, предпочтительно со встроенными колесами, обеспечивающего размещение и хранение в нем груза.
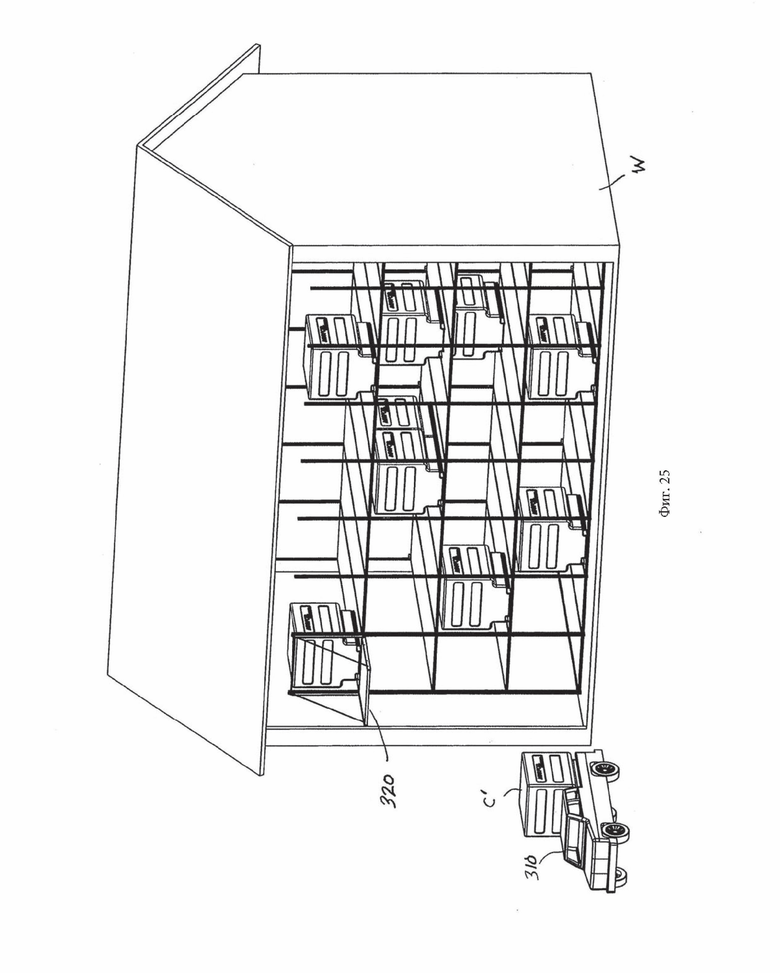
[0044] Фиг. 25 представляет собой иллюстрацию складского хозяйства, в котором могут храниться, например, контейнеры/отделяемые грузовые отсеки, показанные на различных чертежах.
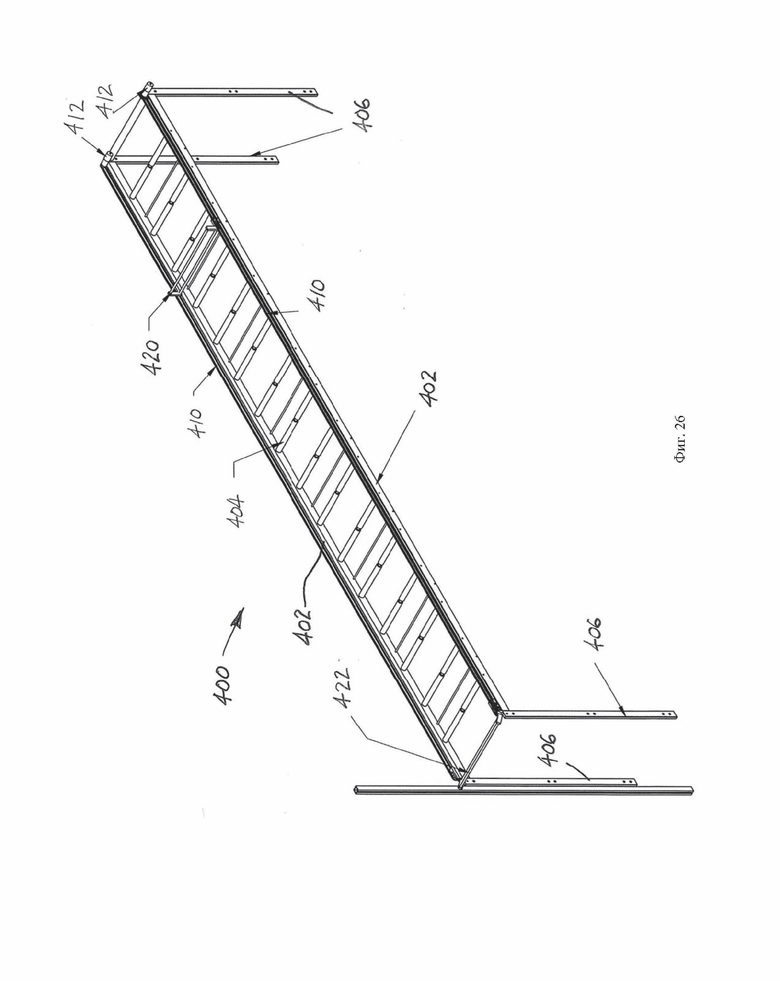
[0045] Фиг. 26 представляет собой вид в аксонометрии другого узла для обеспечения размещения груза, его хранения и перемещения в грузовое отделение транспортного средства или из него.
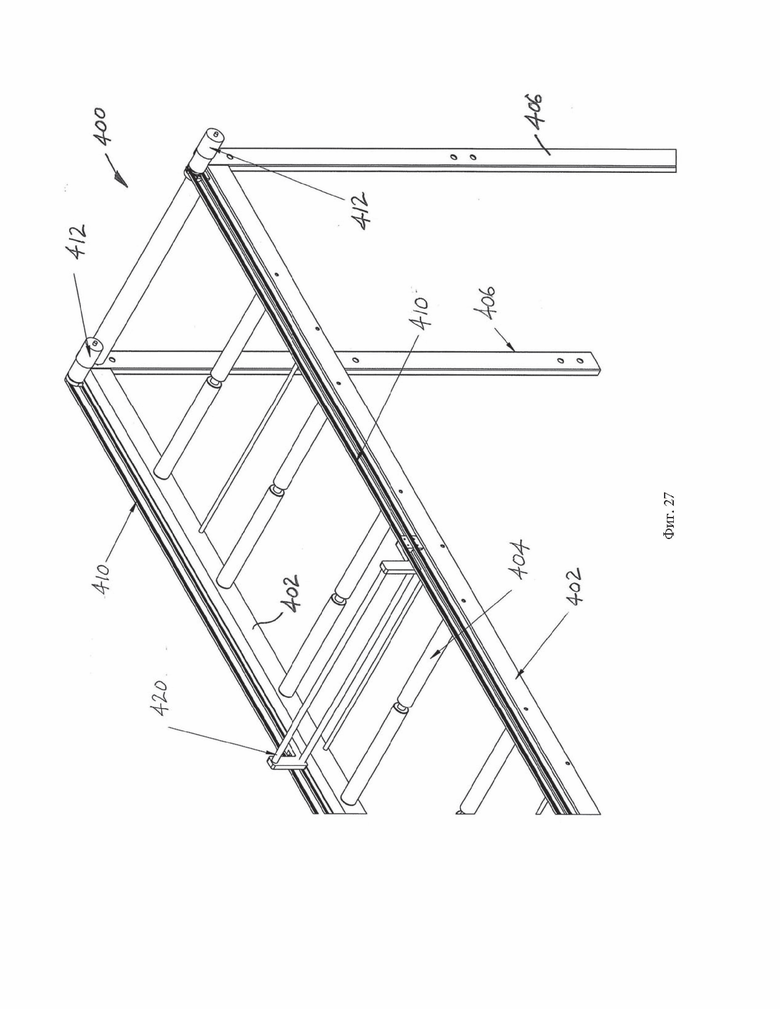
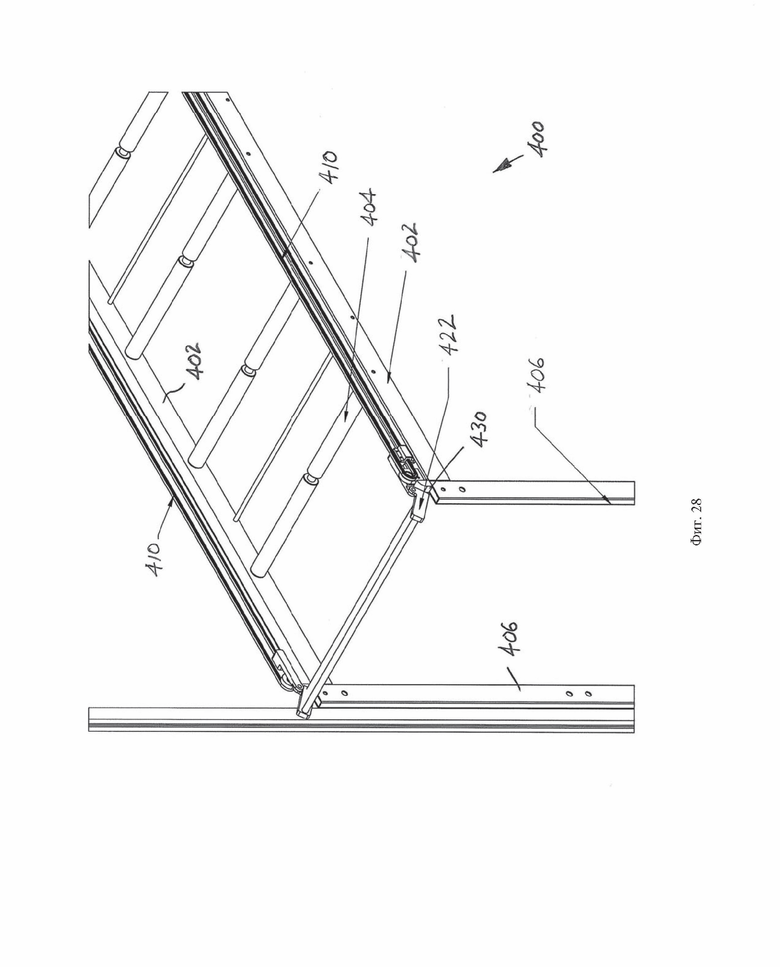
[0046] Фиг. 27 и 28 представляют собой увеличенные виды в аксонометрии, соответственно, правой и левой частей узла, показанного на фиг. 26.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
[0047] Нижеследующее описание со ссылкой на сопроводительные чертежи выполнено для содействия всестороннему пониманию одного или нескольких вариантов выполнения настоящего изобретения, как определено пунктами формулы изобретения и их эквивалентами. Оно включает различные конкретные детали для содействия пониманию изобретения, но их следует рассматривать просто как иллюстративные. Соответственно, среднему специалисту в данной области техники следует понимать, что возможно внесение различных изменений и модификаций в различные варианты выполнения, описываемые в данном документе, без отклонения от объема правовой охраны и сущности настоящего изобретения. Различные иллюстративные варианты выполнения настоящего изобретения не ограничиваются конкретными деталями различных вариантов выполнения и должны быть истолкованы как включающие все изменения и/или эквиваленты, или замещения, включенные в идеи и технологический объем правовой охраны прилагаемой формулы изобретения. При описании чертежей по возможности одинаковые ссылочные позиции использованы для одинаковых элементов.
[0048] Термины «содержит» или «может содержать», используемые в настоящем изобретении, указывают на наличие раскрытых соответствующих функций, операций, элементов и им подобных, и не ограничивают дополнительные одну или несколько функций, операций, элементов и им подобных. Кроме того, следует понимать, что термины «содержать», «содержащий», «иметь» или «имеющий», используемые в настоящем изобретении, указывают на наличие компонентов, свойств, количеств, этапов, операций, элементов, частей или их сочетания, приведенных в подробном описании, и не исключают наличия или добавления одного или нескольких свойств, количеств, этапов, операций, элементов, частей или их сочетания.
[0049] Термины «или» или «по меньшей мере один из А или/и В», используемые в настоящем изобретении, включают любые и все сочетания слов, перечисленных вместе с ними. Например, «А или В» или «по меньшей мере один из А или/и В» означает - включая А, включая В, или включая как А, так и В.
[0050] Несмотря на то, что такие термины, как «первый» и «второй», используемые в настоящем изобретении, могут видоизменять различные элементы различных иллюстративных вариантов выполнения, тем не менее, эти термины не ограничивают соответствующие элементы. Например, эти термины не ограничивают порядок и/или значимость соответствующих элементов, а также эти термины не исключают дополнительных элементов (например, второй, третий и т.д.). Эти термины могут быть использованы для отделения одного элемента от другого элемента. Например, первое механическое устройство и второе механическое устройство - все обозначают механические устройства и могут обозначать различные типы механических устройств, или один и тот же тип механического устройства. Например, первый элемент может быть назван вторым элементом без отклонения от объема правовой охраны различных иллюстративных вариантов выполнения настоящего изобретения, и аналогично, второй элемент может быть назван первым элементом.
[0051] Следует понимать, что когда элемент упомянут как «присоединенный» или «соединенный» с другим элементом, то элемент может быть непосредственно присоединен или соединен с другим элементом, при этом может существовать промежуточный элемент между одним и другим элементом. В противоположность этому, следует понимать, что когда элемент упомянут как «непосредственно присоединенный» или «соединенный» с другим элементом, то между одним и другим элементом отсутствует промежуточный элемент.
[0052] Термины, используемые в различных иллюстративных вариантах выполнения настоящего изобретения, предназначены лишь для описания конкретных иллюстративных вариантов выполнения, и не предполагаются для ограничения различных иллюстративных вариантов выполнения настоящего изобретения. В данном документе подразумевается, что формы единственного числа включают также формы множественного числа, если в контексте с очевидностью не указано иное.
[0053] Все термины, используемые в данном документе, включая технические или научные термины, имеют те же значения, что и те, которые обычно понимаются средним специалистом в соответствующей области техники, если они не определены иным образом. Термины, определенные в обычно используемом словаре, следует интерпретировать как имеющие те же значения, что и контекстные значения соответствующей технологии, и не следует их интерпретировать как имеющие несоответствующие или чрезмерные значения, если они четко не определены в различных иллюстративных вариантах выполнения.
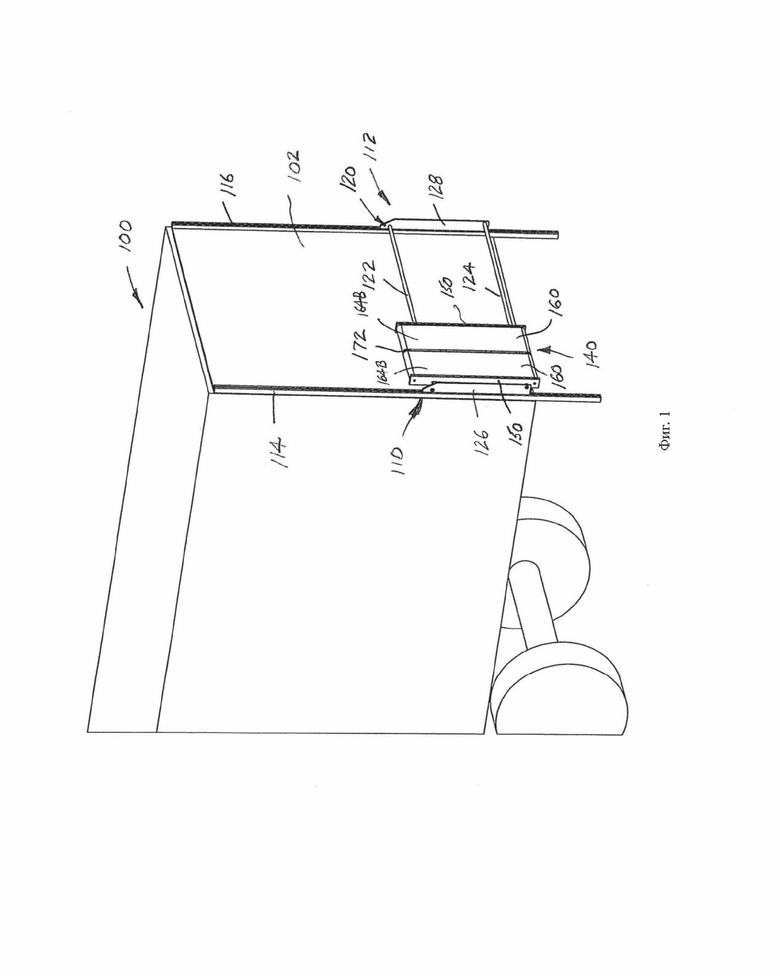
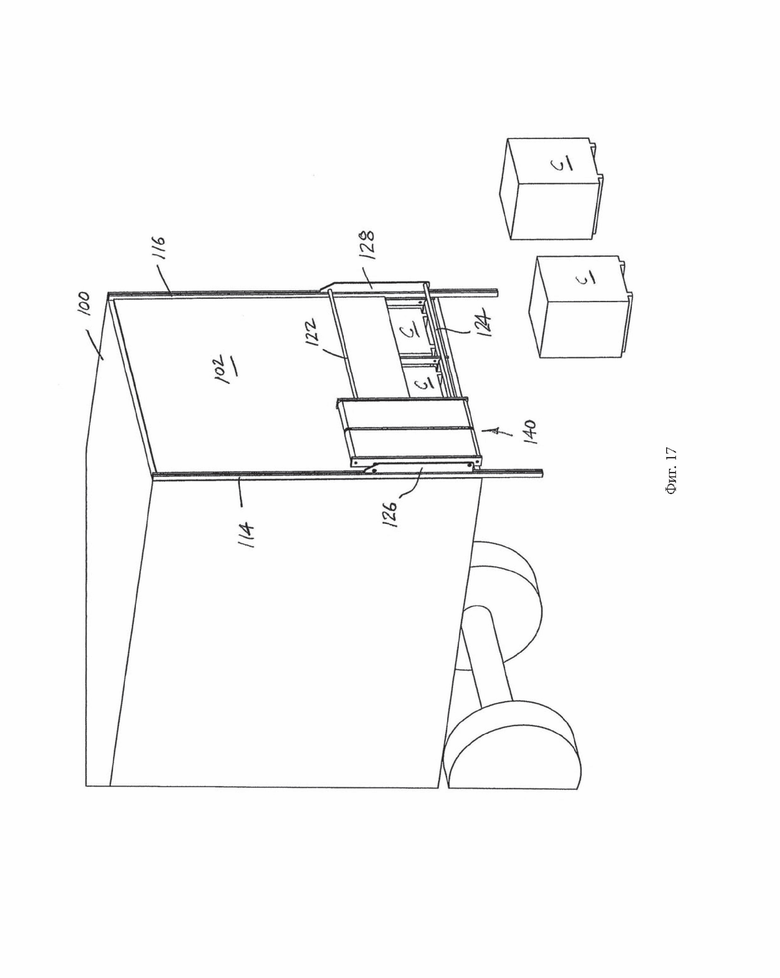
[0054] На фиг. 1 показана задняя часть или задний конец снабженного колесами грузового транспортного средства 100, такого как грузовой фургон, грузовик с закрытым кузовом, прицеп и т.д., или отделяемый грузовой контейнер для хранения, который может быть избирательно установлен на транспортное средство или удален из транспортного средства, который содержит дверь 102, обеспечивающую доступ во внутреннее грузовое отделение 104. В проиллюстрированном варианте выполнения дверь 102 является верхней дверью, такой как дверь гаражного типа, содержащая ряд панелей, каждая из которых поддерживается вдоль противоположных краев роликами, обычно входящими, в общем, в с-образные дорожки качения. Конкретные детали двери не проиллюстрированы, поскольку конструкция и работа такой верхней двери является хорошо известной и понятной специалистам в данной области техники, так что для полного и детального понимания настоящего изобретения не требуется ее дополнительного описания. Кроме того, иллюстрация двери 102 этого типа не исключает использования дверей других типов, и вместо этого отражает возможность открывать и закрывать доступ к грузовому отделению 104 транспортного средства 100.
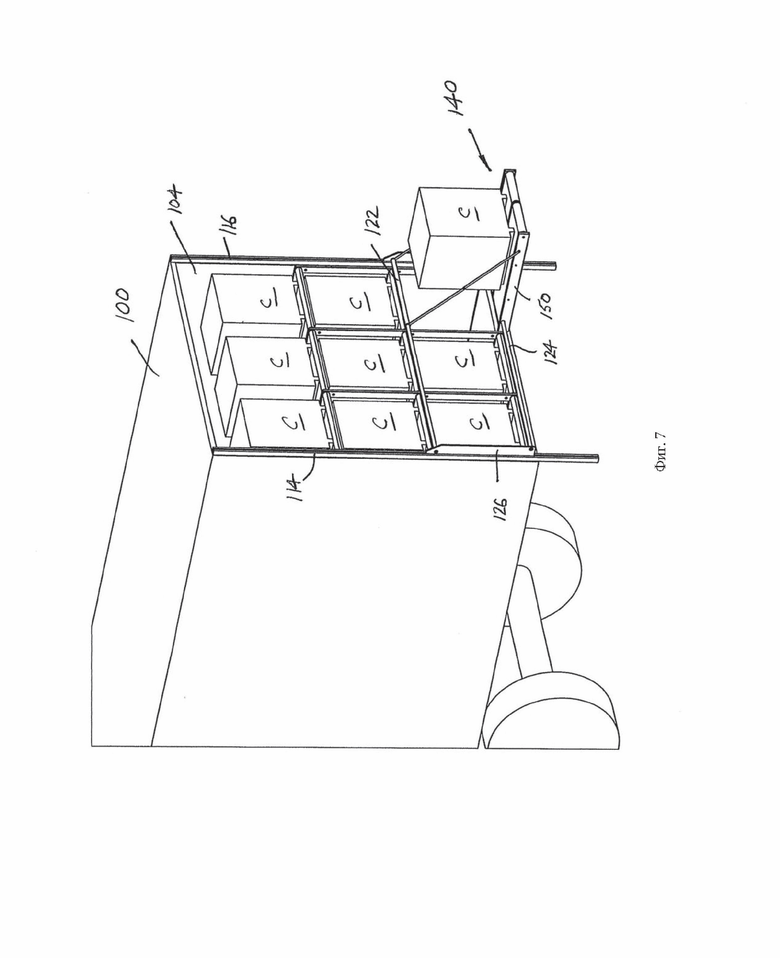
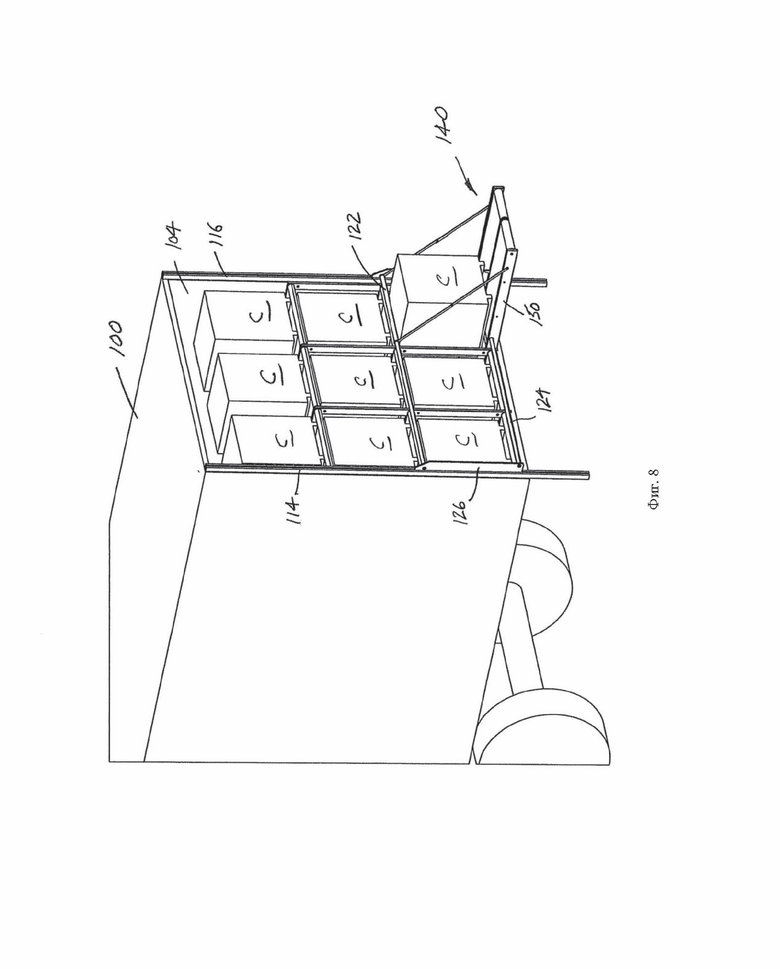
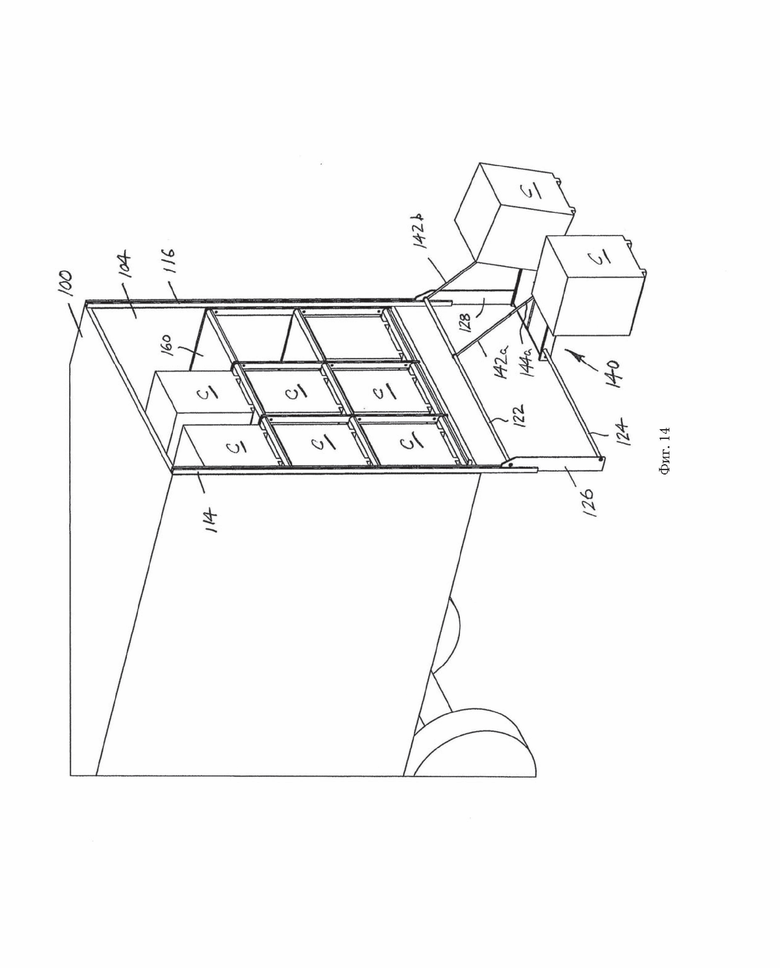
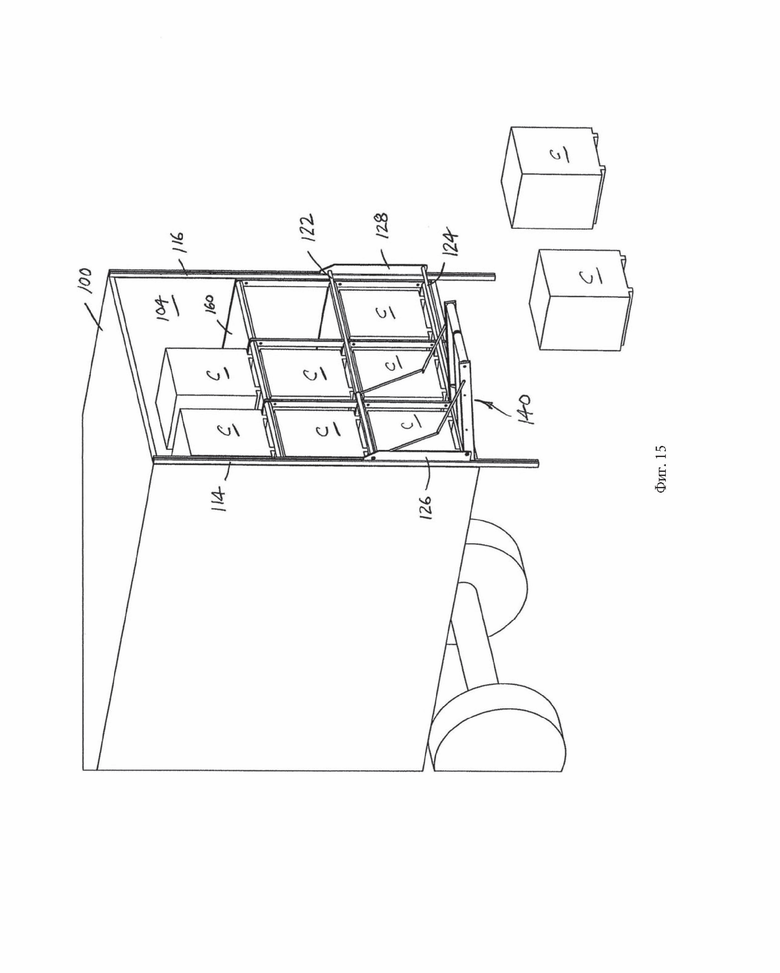
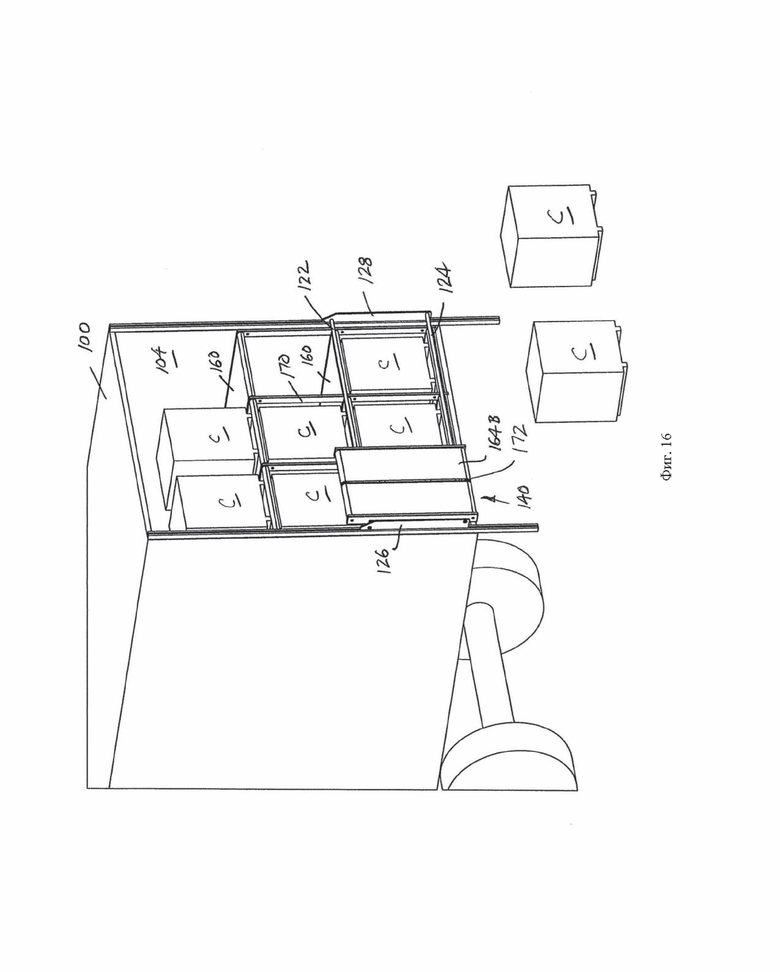
[0055] К заднему концу транспортного средства 100 прикреплена (например, добавлена или модернизирована) или интегрирована в виде части исходного транспортного средства автоматизированная подъемная дверь или подъемный узел 110. Подъемный узел 110 соединен с помощью монтажного узла 112 с грузовым отделением 104 транспортного средства 100. Монтажный узел 112 содержит первые и вторые, проходящие вертикально направляющие или дорожки 114, 116, которые расположены вдоль внешних краев в боковом направлении в задней части грузового отделения 104. Как показано на чертежах, дорожки 114, 116 могут проходить по вертикали больше, чем отделение 104 для хранения и, в частности, в этом случае дорожки проходят наружу от нижнего края проема или доступа к грузовому отделению 104. Хотя дорожки 114, 116 показаны в виде статических компонентов, которые всегда проходят под нижним уровнем грузового отделения, тем не менее, также предполагается, что дорожки могут заканчиваться у основания грузового отделения и содержать выдвижные/убирающиеся или телескопические части, которые обеспечивают увеличенную длину дорожек, что дает возможность дорожкам сокращаться или уменьшаться по длине при их неиспользовании во время погрузки или разгрузки груза. В предпочтительном варианте монтажный узел 112 обычно содержит прямоугольную раму 120, содержащую первый или верхний горизонтальный элемент 122 и отнесенный по вертикали второй или нижний горизонтальный элемент 124. Кроме того, рама 120 содержит первый и второй вертикальные элементы 126, 128, которые присоединены к противоположным концам первого и второго горизонтальных элементов 122, 124.
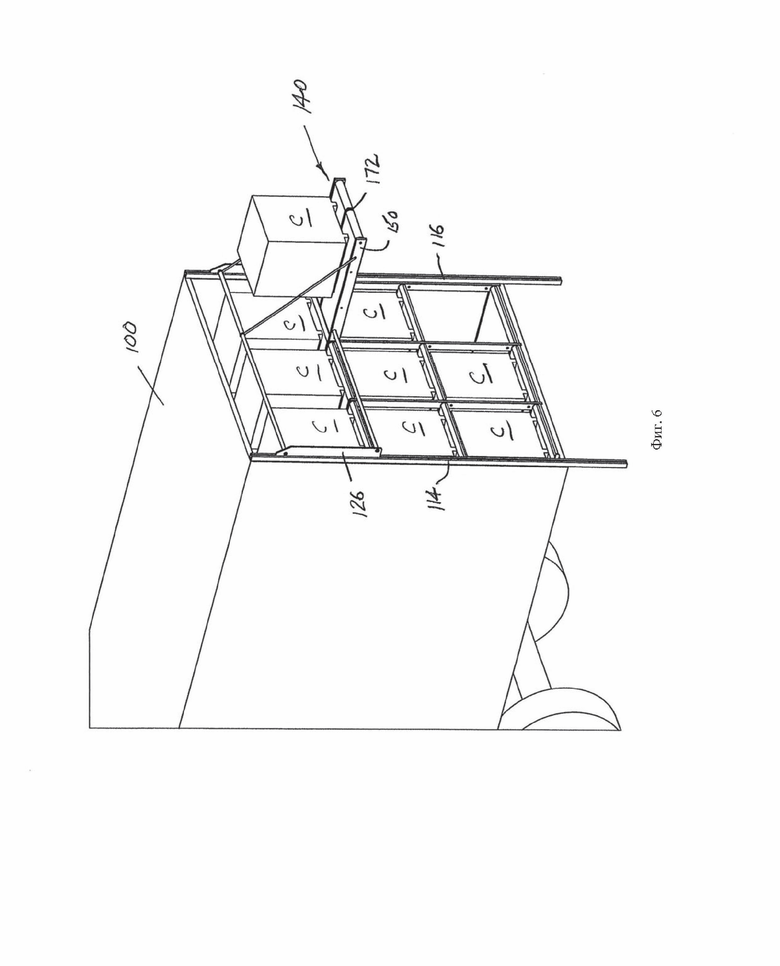
[0056] В одном предпочтительном варианте выполнения части монтажного узла 112, более точно, дорожки 114, 116 и рама 120, поддерживают подъемный узел 110 для его перемещения относительно грузового отделения 104. Конкретнее, подъемный узел 110 содержит платформу 140, присоединенную к раме 120, при этом платформа выполнена либо в виде части транспортного средства 100, либо установлена на транспортном средстве у открытого конца его грузового отделения 104. В частности, рама 120 и платформа 140 перемещаются относительно грузового отделения 104 способом, который будет описан дополнительно ниже. В одном предпочтительном варианте платформа 140 предпочтительно установлена с возможностью поворота или шарнирно вдоль первого края рамы 120, в частности, нижнего горизонтального элемента 124. Рама 120 в свою очередь является подвижной относительно грузового отделения 104. Однако обычно рама 120 предназначена для избирательного вертикального перемещения, где вертикальная протяженность перемещения составляет по меньшей мере величину, которая обычно соответствует высоте двери 102, и, таким образом, обеспечивает доступ ко всему грузовому отделению 104. Кроме того, рама 120 предпочтительно способна перемещаться вертикально вниз так, что второй или нижний горизонтальный элемент 128 рамы и платформы 140, которая прикреплена к нему с возможностью поворота, расположен, например, смежно с поверхностью земли ниже заднего конца транспортного средства 100.
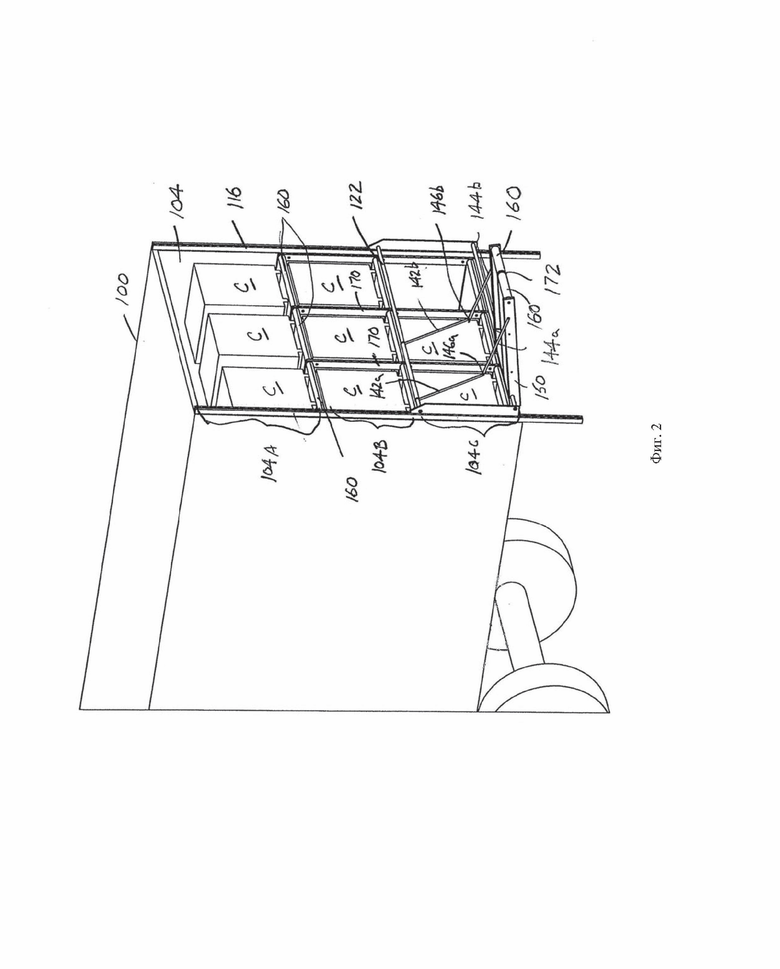
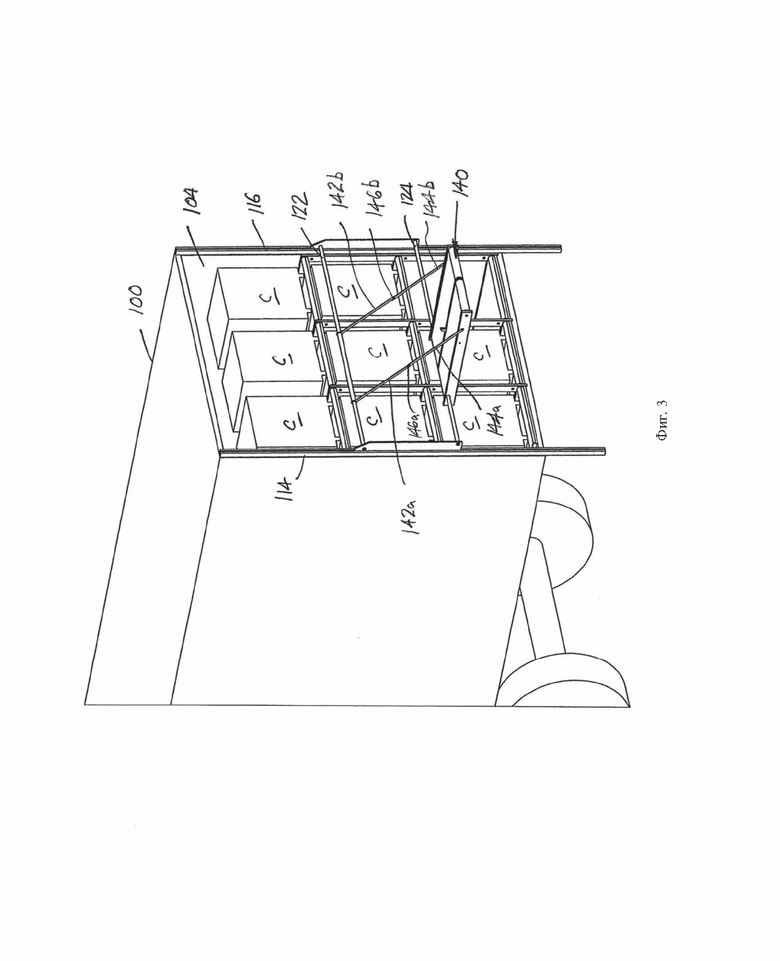
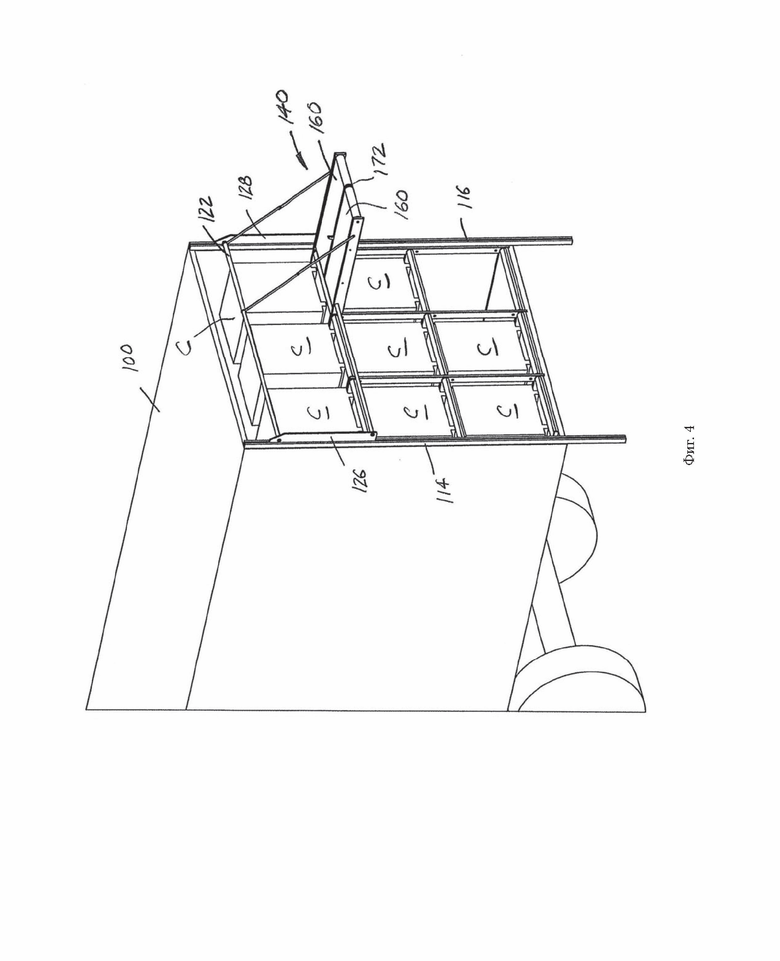
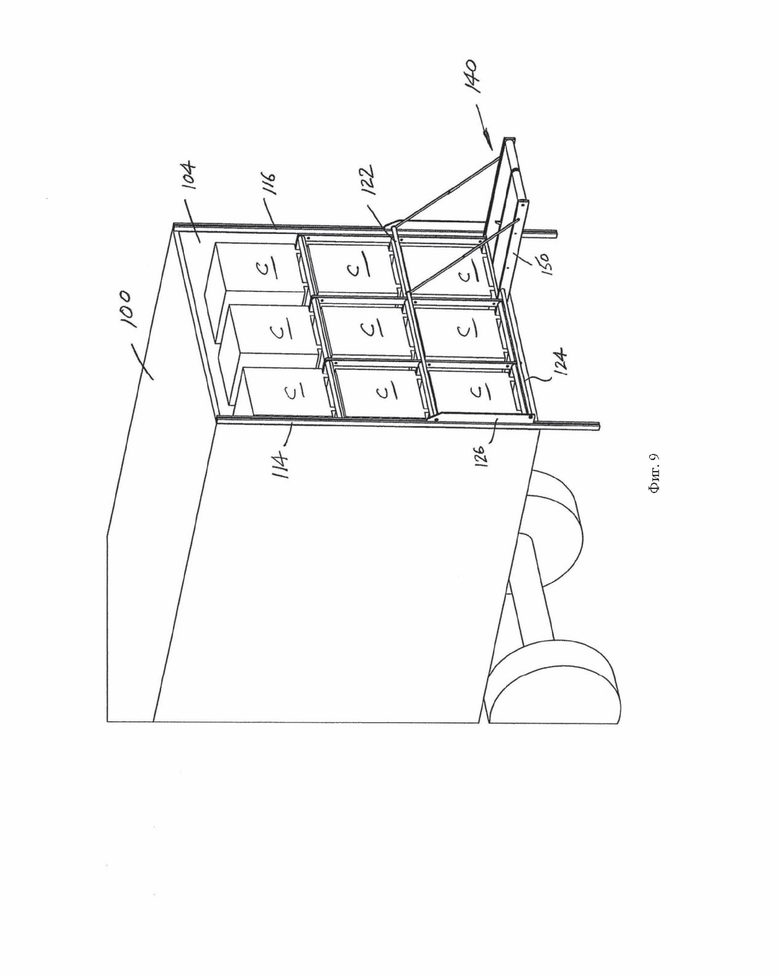
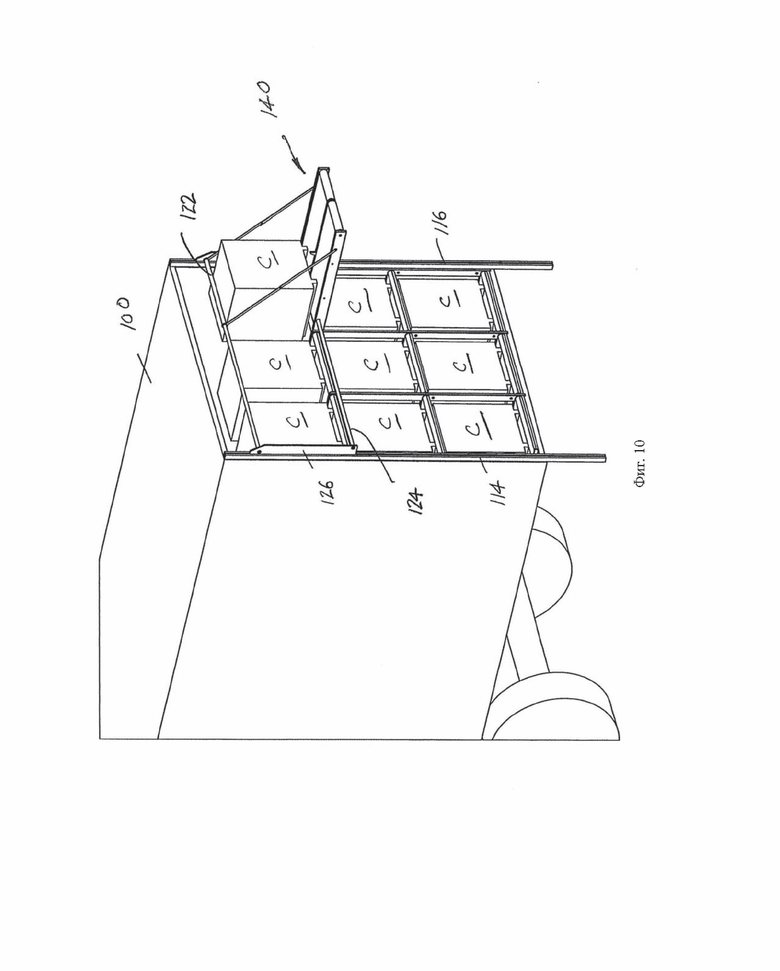
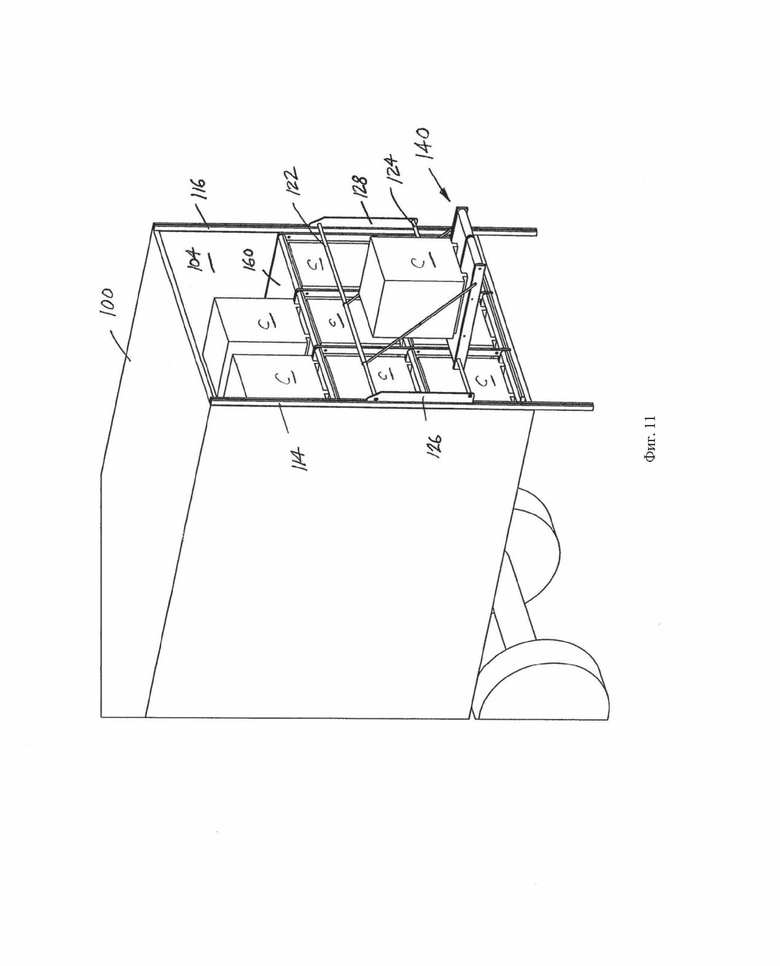
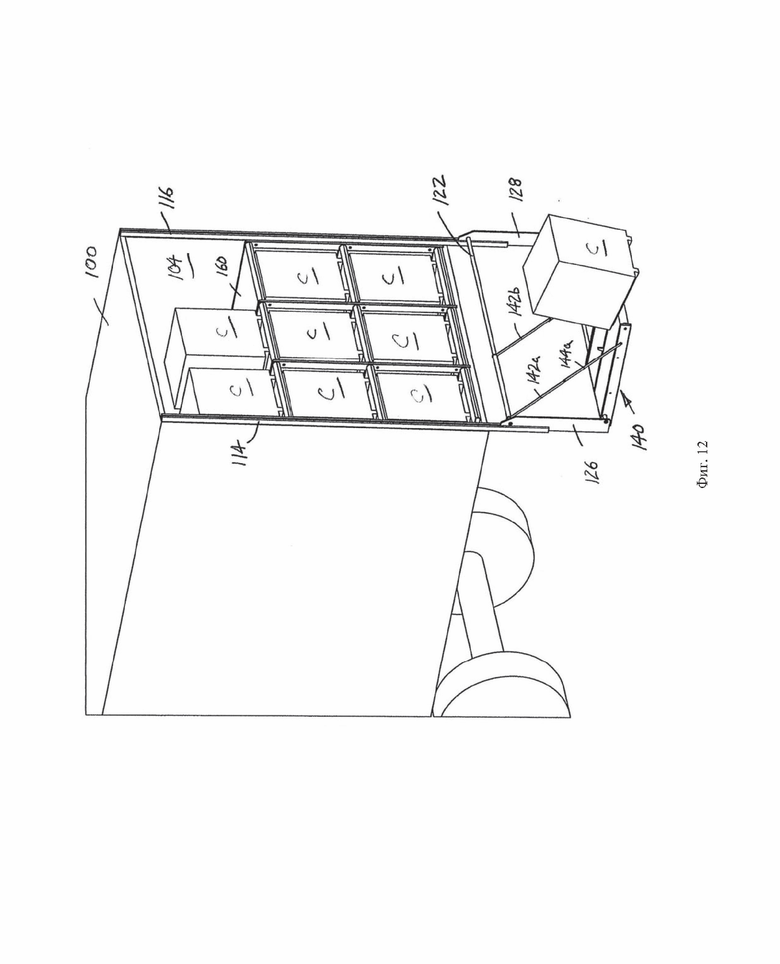
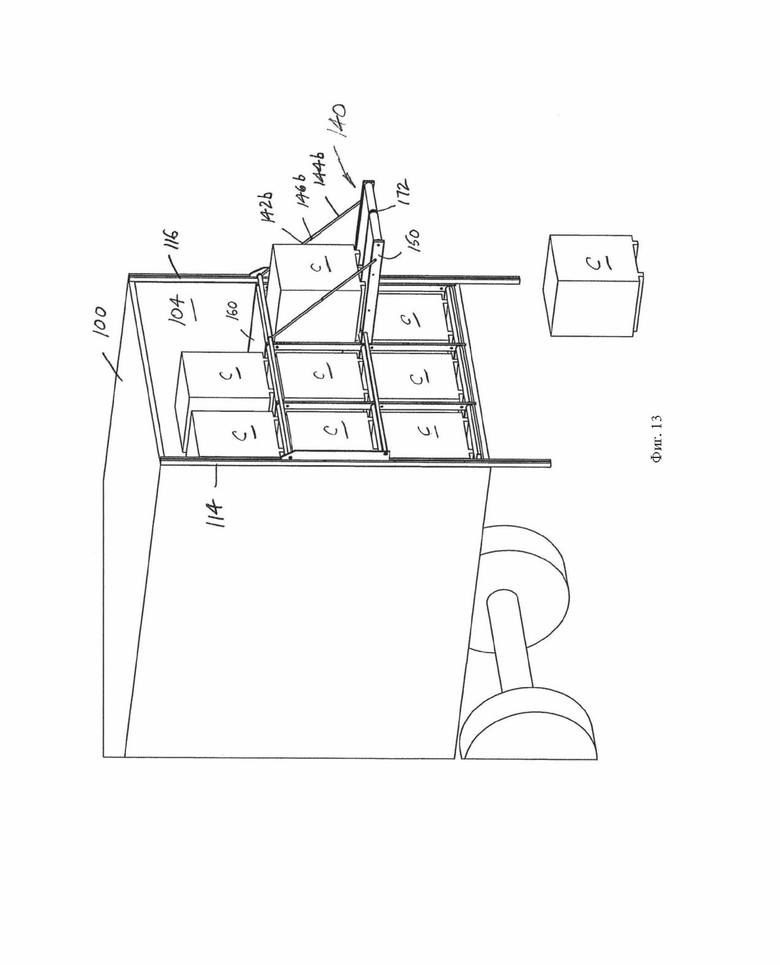
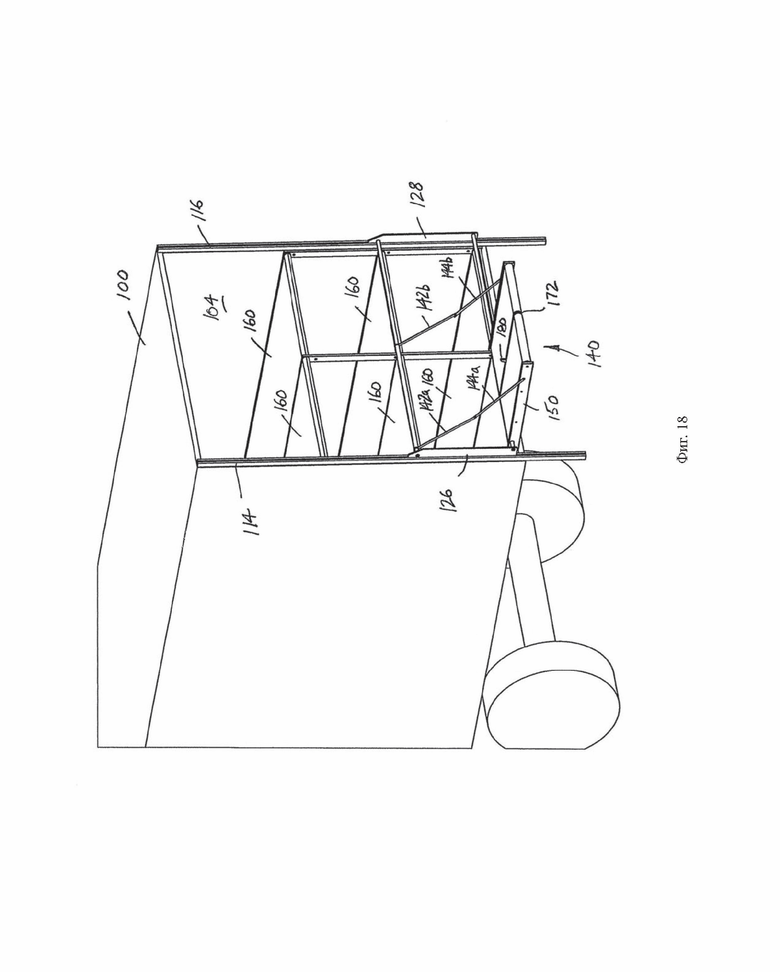
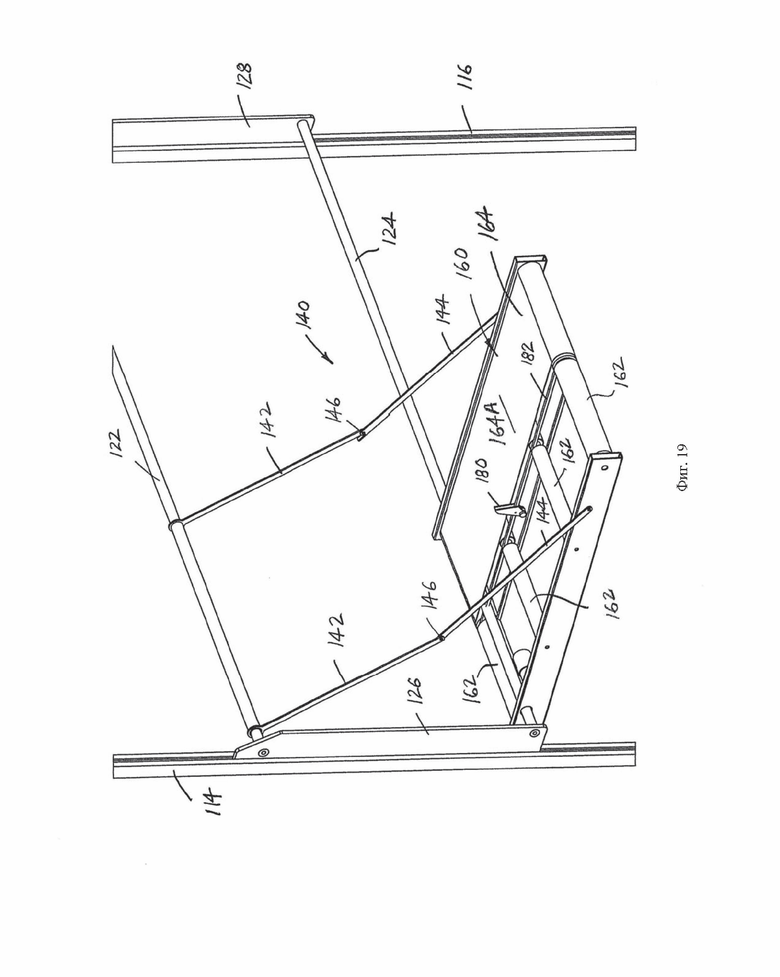
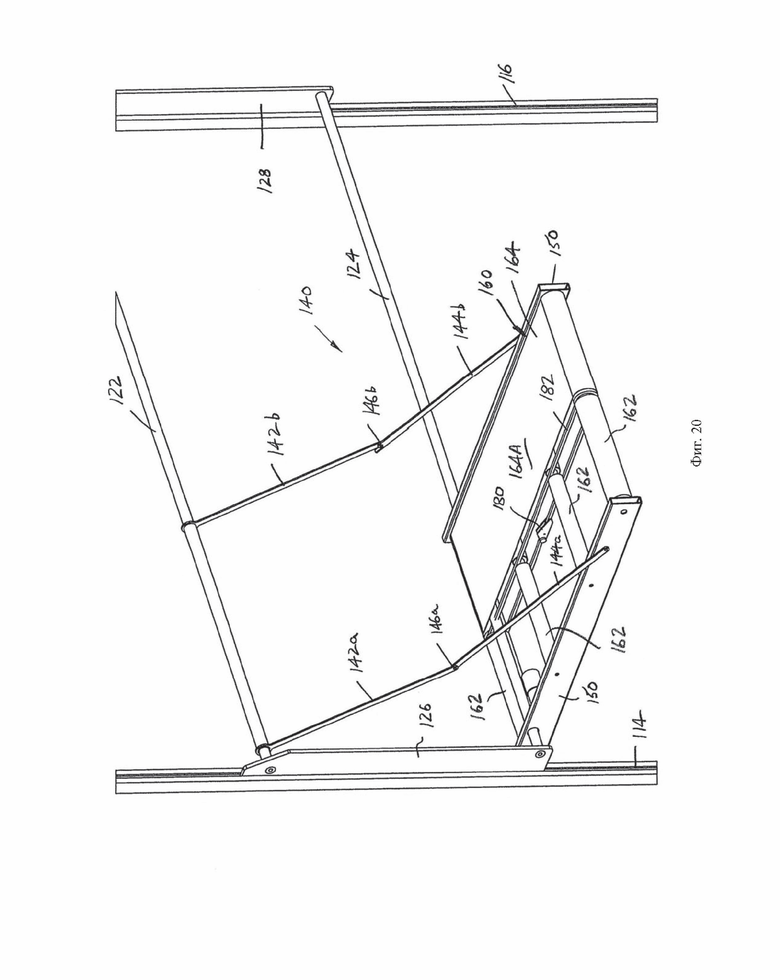
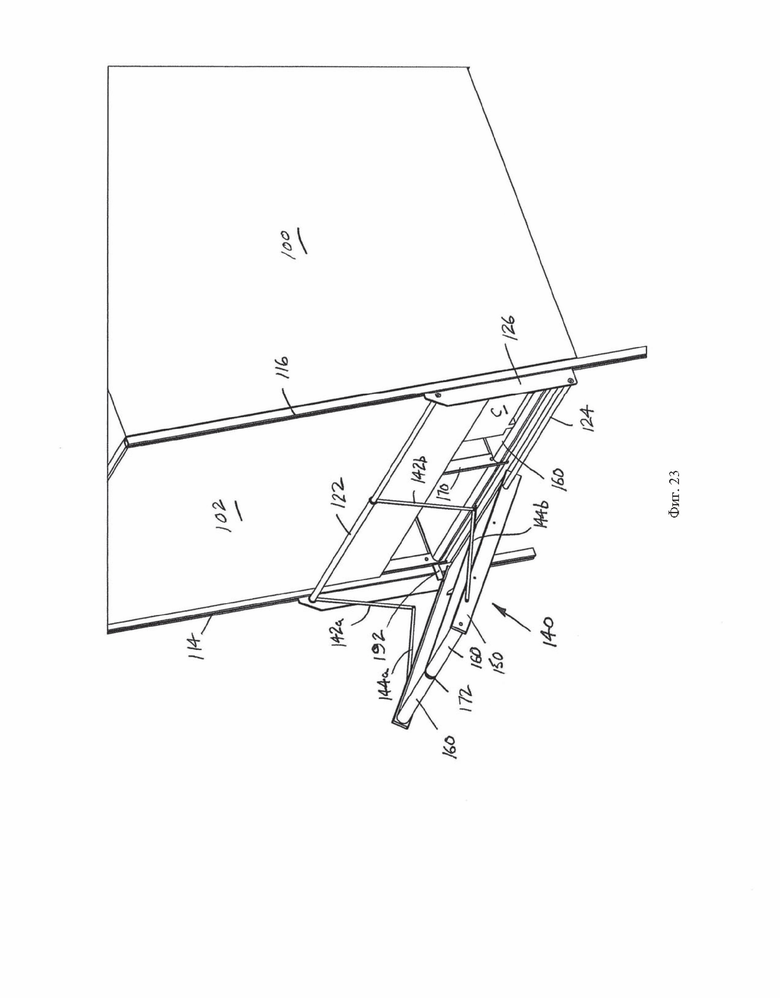
[0057] Как отмечено выше, платформа 140 прикреплена к раме, в частности ко второму горизонтальному элементу 124, например так, что платформа может поворачиваться между вертикальным положением хранения (фиг. 1, 16 и 17) и рабочим горизонтальным положением (фиг. 2-14). Первый и второй рычаги 142, 144 (фиг. 2-3) проходят между вторым краем платформы 112 и первым или верхним горизонтальным элементом 122. В проиллюстрированном варианте выполнения каждый рычаг 142, 144 представляет собой двухзвенный рычажный механизм, где первая часть 142а (142b) рычажного механизма с возможностью поворота соединена со второй частью 144а (144b) рычажного механизма с помощью штифтового соединения 146, которое делает возможным избирательный поворот или вращение вокруг штифта между первой частью и второй частью рычажного механизма. Каждая первая часть 142а, 142b рычажного механизма с возможностью поворота присоединена первым концом к первому или верхнему горизонтальному элементу 122 рамы 120. Каждая вторая часть 144а, 144b рычажного механизма имеет первый конец, присоединенный с возможностью поворота к соответствующей части 142а, 142b, соответственно, с помощью штифтов 146а, 146b. Кроме того, второй конец каждой второй части 144а, 144b рычажного механизма присоединен с возможностью поворота к платформе 140, в частности присоединен с возможностью поворота к боковой раме 150 платформы 140.
[0058] В положении хранения (т.е. когда платформа 140 находится в вертикальном положении хранения) первые и вторые части 142а, 144а и 142b, 144b перекрывают друг друга (фиг. 1). С другой стороны, в развернутом положении, т.е. когда платформа 140 находится в горизонтальном рабочем положении (фиг. 3), первые и вторые части 142а, 144а рычажного механизма по существу выровнены в продольном направлении. Фиг. 2 иллюстрирует переходное положение частей 142а, 144а рычажного механизма между положением хранения и развернутым положением. Двигатель (например, электрический, гидравлический, пневматический и т.д.) избирательно перемещает платформу 140 между положением хранения и развернутым положением.
[0059] Несмотря на то, что в предпочтительном варианте выполнения платформа 140 хранится в вертикальном положении, как проиллюстрировано на фиг. 1, тем не менее, специалисту в данной области техники следует понимать, что можно использовать другие места хранения и другие положения платформы без отклонения от объема правовой охраны и цели настоящего изобретения. Удаление рычагов 142, 144 и вероятное удаление верхнего горизонтального элемента 122 рамы 120 исключает возможность того, что рычаги будут ограничивать перемещение груза в боковом направлении, но будут допускать хранение платформы 140, например, в горизонтальном положении под отделением для хранения. В таком альтернативном варианте платформа 140 может быть перемещена в горизонтальное положение хранения либо выше, либо ниже отделения для хранения. Подобным образом могут быть выполнены модификации для обеспечения хранения платформы 140 вдоль боковой стороны грузового отделения 104 или даже внутри грузового отделения, хотя ни один из этих вариантов не считается желательным по сравнению с показанным на сопроводительных чертежах вследствие возможности размещения подъемного узла настоящего изобретения в качестве модифицированного варианта для существующего транспортного средства, а также легкости, с которой подъемный узел ПО может быть встроен в конструкцию транспортного средства производителя оригинального оборудования (OEM).
[0060] Другой двигатель перемещает раму 120 по вертикали вверх и вниз относительно дорожек 114, 116, чтобы избирательно переустанавливать платформу 140 в различных вертикальных положениях относительно грузового отделения 104 (см. три различных уровня расположения платформы на фиг. 2-4). Кроме того, диапазон перемещения рамы 120 в вертикальном направлении простирается до нижнего положения, показанного ниже грузового отделения 104, например, как показано на фиг. 12, так что единицы груза могут быть перенесены с платформы 140 на соответствующую поверхность, такую как поверхность земли.
[0061] Еще один двигатель перемещает платформу 140 в боковом направлении относительно рамы 120, в результате чего платформа может быть переставлена из стороны в сторону относительно отделения 104 хранения. Например, для сравнения фиг. 2-4 иллюстрируют перемещение платформы 140 в боковом направлении. Следует понимать, что вертикальное перемещение рамы 120 (и, следовательно, платформы 140) может быть независимым от бокового перемещения платформы или в сочетании с ним, чтобы максимально увеличить скорость и эффективную работу платформы 140.
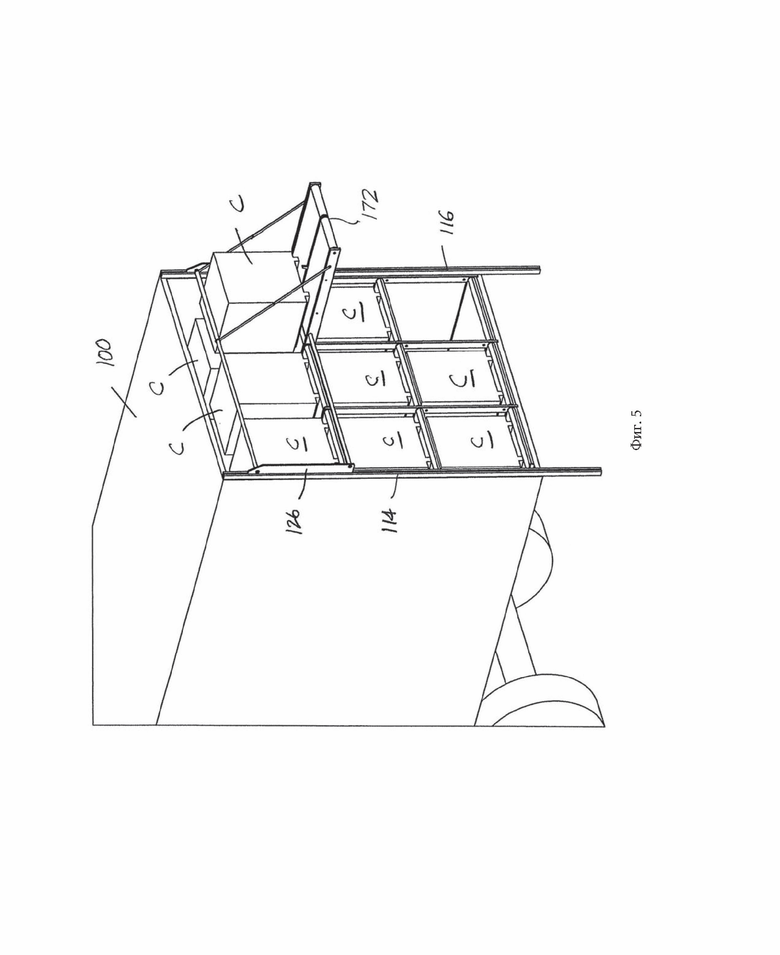
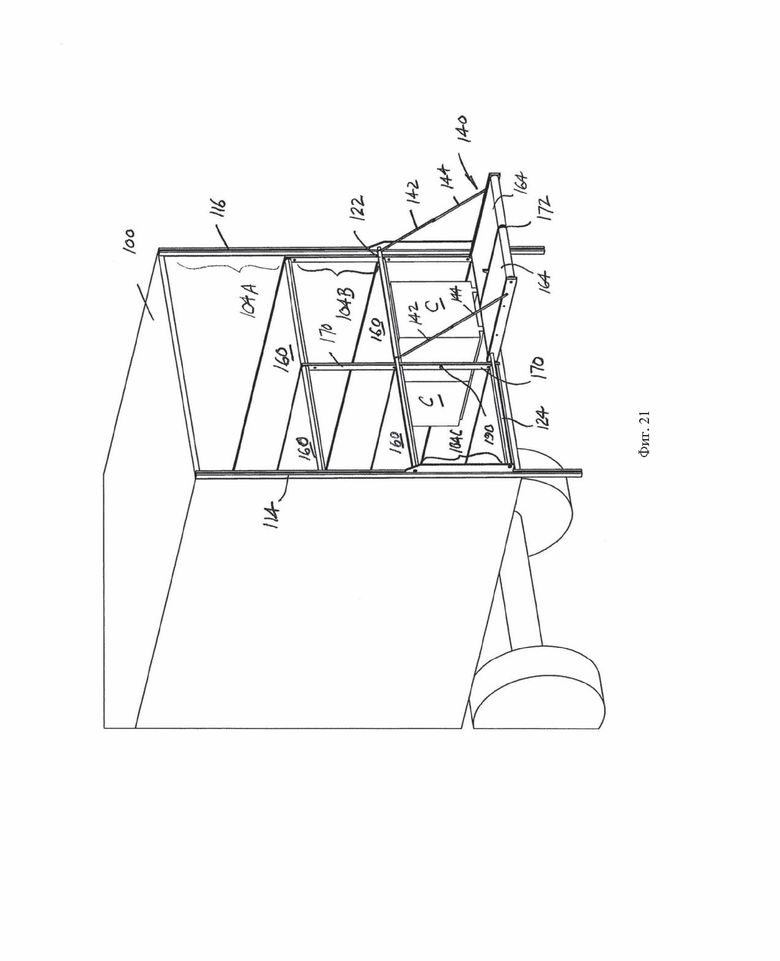
[0062] На фиг. 2-15 показано, что грузовое отделение 104 может быть одним большим отделением или может быть подразделено на индивидуальные отсеки отделения. Например, если отсутствует физическое разделение или разбиение грузового отделения 104, то крупные или небольшие единицы груза могут быть размещены в едином грузовом отделении. В других случаях грузовое отделение 104 может быть разделено на (i) физически разделенные отсеки (т.е. отсеки, которые содержат физический барьер), (ii) отсек, в котором отсутствует физический барьер, разделяющий участки этого отсека отделения на меньшие отсеки, но которые работают в качестве отдельных отсеков отделения, или (iii) сочетание физически разделенных участков или не физически разделенных участков отсека отделения. Тогда следует понимать, что отсеки отделения могут быть или могут не быть одинакового размера. Например, как проиллюстрировано на фиг. 2, грузовое отделение 104 имеет три отдельных уровня 104А, 104В и 104С. Первый или верхний уровень 104А образует отсек отделения, определяемый частично боковыми стенками грузового отделения 104 и верхней стенкой или потолком грузового отделения. Никакой физический барьер не подразделяет или не разделяет верхний уровень 104А, однако, верхний уровень «проиллюстрирован» в виде трех обособленных отсеков отделения, о чем свидетельствуют три отдельных единиц груза, проходящих в боковом направлении поперек верхнего уровня. «Пол» верхнего уровня 104А образован тремя отдельными конвейерами 160, показанными в данном документе в виде конвейеров с одинаковыми размерами (хотя следует понимать, что конвейеры также могут иметь различные размеры). Каждый конвейер 160 в отсеке отделения и конвейер (конвейеры) 160, совместно действующий с подвижной платформой 140, является обычной конструкцией, содержащей по меньшей мере первый и второй ролики 162 (фиг. 19-20), разнесенные в продольном направлении, (и возможно содержащей множество промежуточных конвейерных роликов), а также окруженной лентой 164, проходящей в виде непрерывной петли и вращающейся вокруг конвейерных роликов. Несмотря на то, что конвейер 160 является обычной конструкцией, тем не менее, на фиг. 19-20 лента 164 удалена с одной из частей конвейера для упрощения иллюстрации и, более конкретно, для того, чтобы показать разнесенные ролики 162. Ролики 162 смежных конвейеров 160 на платформе 140 предпочтительно взаимно соединены так, что индивидуальные ленты 164 будут перемещаться с одинаковой скоростью. Обычно один или несколько конвейерных роликов 162 приводятся в действие или моторизованы так, что лента 164 вращается и определяет движущуюся верхнюю поверхность 164А ленты, которая проходит вокруг первого крайнего ролика, а затем определяет движущуюся нижнюю поверхность 164В, когда лента проходит в направлении второго крайнего ролика. Таким образом, единица С груза перемещается по участку 164А верхней поверхности ленты конвейера 160 и с помощью указанного участка для продвижения отдельной единицы груза (единиц груза) в направлении двери/проема грузового отделения 104. Подобным образом, единицы груза С на смежных конвейерах 160 аналогично продвигаются в направлении двери/проема грузового отделения 104. Конвейер 160 в едином грузовом отделении или конвейеры в отдельных отсеках является/являются конструктивно одинаковыми и работают по существу одинаковым образом, так что описание конструкции и работы конвейера 160 применимо либо к каждому из конвейеров на платформе, либо в грузовом отделении/отсеках отделения, если только конкретно не описано, как применимое только к одному из этих конечных применений.
[0063] Два нижних уровня 104В, 104С физически отделены конвейером 160, расположенным как выше, так и ниже этих уровней отсеков отделения. Кроме того, два уровня 104В, 104С физически отделены вертикальными разделителями 170. В данном документе разделители 170 определяют три разнесенных в боковом направлении физически разделенных отсека отделения в каждом из этих двух уровней 104В, 104С. Опять же, следует понимать, что отсеки отделения не обязательно должны быть одинакового размера (по горизонтали и/или вертикали), просто они показаны таким образом для упрощения иллюстрации. Подобным образом может быть предусмотрено большее или меньшее количество отсеков отделения, в частности, в зависимости от типа доставляемого груза С.
[0064] Конвейеры 160 для различных отсеков отделения предпочтительно приводятся в действие отдельными двигателями (не показанными) или одним или несколькими общими двигателями, при которых подходящее распределение движущей силы от двигателя (двигателей) может быть распределено для индивидуальной и/или одновременной работы одного или нескольких конвейеров.
[0065] Платформа 140 предпочтительно содержит конвейер 160 или предпочтительно первый и второй конвейеры, разделенные зазором 172, который проходит в направлении перемещения индивидуальных лент 164 конвейеров платформы. В частности, один или несколько толкателей 180 (фиг. 19) закреплены с разнесением вдоль гибкого приводного элемента такого, как цепь 182, которая вращается в соединении с лентами 164 конвейеров 160 платформы. Толкатели 180 имеют такие размеры, что они выступают над верхними поверхностями 164А лент 164 конвейеров 160 платформы, при этом предпочтительно толкатели автоматически перемещаются или складываются в положение с уменьшенной высотой, причем толкатели не проходят выше нижних поверхностей 164 В лент на обратном пути лент на каждом конвейере (фиг. 20). Хотя толкатели 180 могут быть переведены в сложенное/нерабочее состояние различными способами, тем не менее, в предпочтительном варианте выполнения толкатели прикреплены к цепи 182, которая вращается и перемещается между двумя конвейерами 160 на платформе 140. Толкатели 180 предпочтительно утяжеляют на одном конце так, что сила тяжести заставляет толкатели подниматься вверх (фиг. 19 - толкатели проходят перпендикулярно от цепи 182, и через зазор 172 между конвейерами 160 платформы), когда толкатель перемещается вдоль верхней части его пути вращения (фиг 19), и автоматически втягивается (фиг. 20 - толкатели обычно совмещаются с цепью и не проходят через зазор), когда толкатели перемещаются к нижней стороне пути перемещения цепи. Таким образом, толкатели 180 могут помогать верхним поверхностям 164А движущихся конвейеров 160 перемещать размещенный на них груз С, физически упираясь вдоль выбранной высоты напротив края единицы груза и ограничивая возможное проскальзывание между единицей груза и верхними поверхностями конвейера платформы. Наоборот, толкатели 180 автоматически втягиваются во время прохождения конвейерами 160 и цепи 182 обратного пути так, что толкатели случайно не соприкасаются с чем-либо, расположенным смежно с нижней стороной конвейеров платформы.
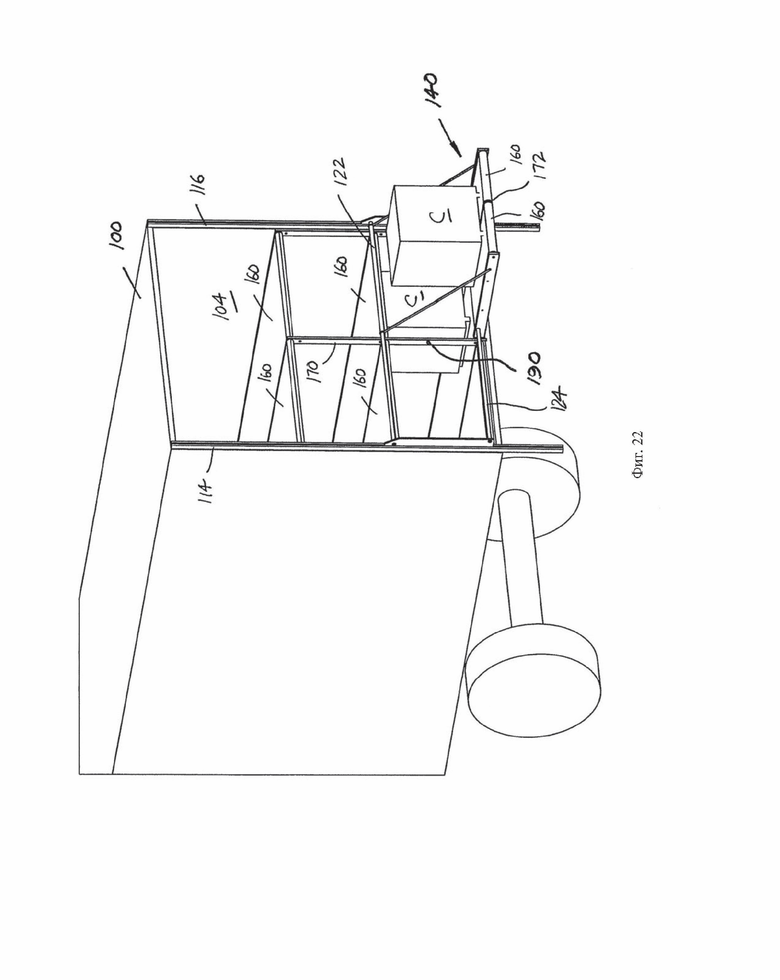
[0066] Кроме того, датчик (датчики) 190 (фиг. 21-22), такие, как оптический датчик, направляет луч света через заднюю часть отсека отделения. Датчики могут быть расположены в различных местах, при этом датчики предпочтительно располагают около заднего конца каждого из отсеков отделения или на этом конце, откуда единицы груза С будут переноситься из отсеков отделения на платформу 140. При работе конвейеров 160 платформы со скоростью, превышающей скорость конвейеров 160 индивидуальных отсеков отделения, единица С груза, которая может примыкать к смежной единице груза внутри индивидуального отсека отделения (фиг. 21), будет отделяться и образовывать промежуток (фиг. 22) между отдельными единицами С груза вследствие повышенной скорости, когда единица груза переносится на конвейеры 160 платформы и отделяется от следующей смежной единицы груза на конвейер в отсеке отделения. Эта повышенная скорость создает промежуток, обнаруживаемый датчиком 190, так что движение конвейера 160 отсека отделения и, подобным образом, следующая смежная единица груза на нем, могут быть остановлены. Таким образом, на платформу 140 переносится только требуемая единица С груза. После этого платформу 140 можно переместить к другому отсеку отделения, а направление вращения конвейеров 160 платформы изменить на обратное, чтобы загрузить единицу С груза в другой отсек отделения (фиг. 7-9) или платформу можно переместить в другое требуемое положение, например, на поверхность земли, где затем перезапускается конвейер платформы для перемещения или выталкивания единицы груза с платформы (фиг. 12). Толкатели 180 обеспечивают эффективное и рациональное перемещение единицы С груза с конвейера 160 платформы. Затем операцию можно повторить для одной или нескольких дополнительных единиц С груза, как проиллюстрировано на фиг. 13-15.
[0067] Также следует понимать, что один или несколько датчиков 190 могут быть выполнены с возможностью считывания знаков, таких как штрих код этикетки, или беспроводного обнаружения/считывания информации чипа RFID (радиочастотная идентификация), соединенного с отдельной единицей С груза, для определения того, какая единица груза была перенесена на платформу 140. Также следует понимать, что контроллер или процессор (компьютер) (не показан) может функционально взаимодействовать с памятью, которая хранит информацию или данные, полученные от датчика (датчиков) 190 относительно конкретного местоположения единицы С груза в отделении 104 для хранения, условие доставки или не доставки единицы груза, и/или при доставке единицы груза - когда и куда была доставлена единица груза. Таким образом, дополнительные данные или информация, например, от GPS (глобальная система навигации и определения положения), и/или информация о дате/времени, и/или температуре в отделении и т.д. может быть введена в контроллер/процессор для текущего контроля и отслеживания груза, а также некоторые или все данные/информация может отображаться на подходящем устройстве отображения (не показано), совместно действующем с транспортным средством, или портативном устройстве, например планшете, смартфоне и т.д., или передаваться любым общепринятым способом (например, проводным и беспроводным способом) в удаленную компьютерную систему или устройство (не показано), и/или распечатанная, если требуется печатная копия информации.
[0068] Двигатели и датчики, совместно действующие с работой двери, конвейеров, частей конвейеров, подъемным узлом и т.д., все взаимосвязаны с контроллером (не показан). Контроллер может быть запрограммирован на автономное открытие двери 102 (фиг. 1 и 2), опускание платформы 140 подъемного узла (фиг. 2), перемещение платформы в требуемое место отделения 104 для хранения (фиг. 3 и 4), разгрузку единицы С груза из отсека отделения на платформу (фиг. 5 и 6), перемещение единицы груза в другой отсек отделения (фиг. 7, 8 и 9), перемещение платформы к отсеку отделения и прием другой/второй единицы груза (фиг. 10), перемещение второй единицы груза в требуемое место, такое как поверхность земли (фиг. 11), перемещение второй единицы груза с платформы на поверхность земли (фиг. 12), перемещение платформы в отсек отделения для извлечения другой/третьей единицы груза (фиг. 13), перемещение третьей единицы груза в требуемое место, такое как поверхность земли, и перемещение третьей единицы груза с платформы на поверхность земли (фиг. 14), перемещение платформы из развернутого положения (фиг. 15) в положение хранения (фиг. 16), и закрытие двери отделения для хранения (фиг. 17).
[0069] Фиг. 23 показывает рычаг или штырь 192, который проходит от отделения 104 для хранения и предназначен для избирательного взаимодействия с платформой. Рычаг 192 жестко прикреплен к одной из вертикальных дорожек 114, 116, и в некоторых случаях рычаг может быть прикреплен к каждой из вертикальных дорожек, так что описание одного рычага является применимым к другому рычагу, если используются два рычага. Рычаг 192 установлен так, что когда платформа 140 перемещается в боковом направлении относительно отделения 104 для хранения, как описано выше, для погрузки и разгрузки единиц С груза в различные отсеки отделения и из них, то платформа не взаимодействует с рычагом. Однако рычаг 192 способствует повороту платформы 140 из горизонтального развернутого положения в вертикальное положение хранения (фиг. 1). В частности, рычаг 192 выступает назад на достаточную величину, так что, когда край платформы 140 (т.е. край, смежный с отделением 104 хранения) расположен под рычагом, а платформа затем перемещается вверх, поджимающее взаимодействие рычага и края платформы прикладывает момент, момент сил или крутящий момент к платформе так, что платформа поворачивается или наклоняется вокруг горизонтального элемента 124 с переходом из горизонтального развернутого положения в вертикальное положение хранения. Обычно при использовании платформы 140 (т.е. при ее перемещении вверх и вниз, и/или из стороны в сторону в боковом направлении в развернутое состояние платформы), наружная боковая сторона платформы отнесена внутрь от рычага 192 так, что край платформы не взаимодействует с рычагом.
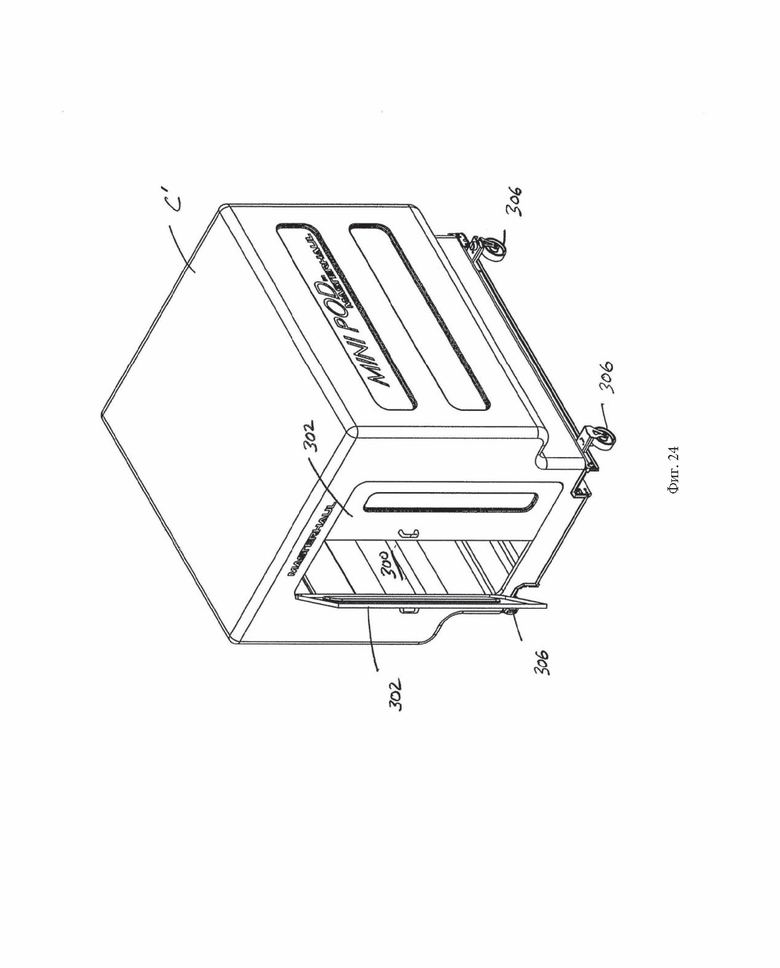
[0070] Фиг. 24 показывает передвижной контейнер для хранения или бункер С', в котором хранятся единицы груза. Передвижной контейнер С' для хранения содержит одну или несколько дверей 302 для доступа во внутреннее отделение 300 для хранения. Также предполагается, что передвижной контейнер С' содержит колеса 306, помогающие движению качения контейнера по поверхности земли. Передвижной контейнер С' предпочтительно имеет такие размеры, что он может входить внутрь и извлекаться из кузова обычного грузовика 310 малой грузоподъемности (фиг. 25). Также предполагается, что передвижной контейнер С' может быть загружен и выгружен из грузовика 310, например, с использованием погрузчика/разгрузчика типа, показанного и описываемого в совместной заявке на патент PCT/US19/29949, поданной 30 апреля 2019 года, описание которой целиком включено в данную заявку посредством ссылки. Как вариант, подъемная платформа 320, связанная со складским зданием или товарным складом W, может быть расположена на заднем конце грузовика 310 так, что передвижной контейнер С' можно освободить и перекатить с платформы грузовика на подъемную платформу. После этого подъемная платформа 321 может перемещать контейнер С' в требуемое место для хранения в товарном складе W. Такое решение дает возможность потребителю заполнять или опорожнять передвижной контейнер С' в месте, удаленном от товарного склада W, и использовать обычный грузовик 310 малой грузоподъемности для транспортировки передвижного контейнера к складскому хозяйству или товарному складу. Использование обычного грузовика 310 преимущественно дает возможность потребителю избавиться от необходимости в специальном грузовике и облегчает перемещение и хранение единиц груза.
[0071] Фиг. 26-28 иллюстрируют альтернативную систему 400 для обеспечения размещения груза, его временного хранения при транспортировке и удаления из грузового отделения транспортного средства. Эта альтернативная система 400 с отделением для хранения взаимодействует с подъемным узлом 110 (на фиг. 26-28 не показанным), описанным выше в связи с фиг. 1-23. В частности, система 400 содержит первую и вторую параллельные удлиненные опорные направляющие 402, на которых размещены противоположные концы роликов 404, которые вращаются относительно них так, что груз С может катится по роликам и продвигаться в грузовик или отделение прицепа (не показан) и из них по вращающимся роликам. Опорные направляющие поддерживаются в горизонтальном положении опорными стойками 406, например, по меньшей мере четырьмя опорными стойками, выполненными смежно с каждым концом первой и второй направляющих. Дополнительные стойки 406 могут быть расположены в промежуточных местоположениях, если потребуется дополнительная поддержка или жесткость.
[0072] На первой и второй опорных направляющих 402 предпочтительно установлены соответствующие гибкие приводные элементы 410. В этом варианте, показанном на фиг. 26-28, гибкие приводные элементы 410 являются цепями, тросами, ремнями, например, которые проходят в виде непрерывной петли от переднего конца системы 400 до ее заднего конца. Гибкие элементы 410 перемещаются в дорожках, расположенных в разнесенных параллельных первой и второй направляющих и избирательно перемещаются либо по часовой стрелке, либо против часовой стрелки в соответствии с выходной мощностью привода, соответственно, от первого и второго двигателей 412. Таким образом, первый двигатель 412 приводит в движение (вращает) первый гибкий приводной элемент 410 либо вперед, либо назад, и аналогично второй двигатель 412 приводит в движение (вращает) второй гибкий приводной элемент 410 либо вперед, либо назад или независимо, или в сочетании с первым гибким приводным элементом. Первая, или передняя направляющая рамка 420 установлена на первом гибком приводном элементе 410 и перемещается вперед или назад с помощью первого гибкого приводного элемента 410. Подобным образом, вторая подвижная направляющая рамка 422 прикреплена ко второму гибкому приводному элементу 410. Таким образом, каждая рамка 420 предпочтительно приводится в движение вдоль только одной торцевой/боковой стороны. Для удобства рамки 420, 422 приводятся в движение соответствующим гибким приводным элементом 410, расположенным на противоположных опорных направляющих 402. Первая и вторая рамки 420, 422 расположены, позиционированы или установлены одна перед грузом С (например, ящиками), а вторая расположена за грузом или ящиками. Первая, или передняя рамка 420 проталкивает груз С из отделения или отсека отделения, а вторая, или задняя рамка 422 проталкивает груз в грузовик или прицеп, в частности, в отделение или отсек отделения транспортного средства (грузовика или прицепа).
[0073] С помощью подходящих программных команд две направляющие рамки 420, 422 с помощью приводных двигателей 412 и гибких приводных элементов 410 могут быть направлены так, чтобы перемещаться навстречу друг другу (или одна перемещается относительно другой) для приложения предварительно выбранной сдавливающей силы, которая сжимает грузовые ящики вместе так, чтобы груз не мог смещаться вперед или назад, при ускорении или торможении транспортного средства. Потребление электротока от соответствующих приводных двигателей 412 используется для текущего контроля «величины» сдавливающей сжимающей силы, прикладываемой к грузу, при этом программное обеспечение направляет приводные двигатели/гибкие приводные элементы 410 по требованию. Эти рамки 420, 422 также могут работать вместе для перемещения груза С вперед или назад для расположения веса груза в идеальном или предпочтительном положении или месте в отделении для хранения транспортного средства.
[0074] Каждый раз, когда задняя направляющая рамка 422 перемещается к задней части отделения или транспортного средства, она изменяет расположение от вертикального положения (положение зацепления с грузом) до горизонтального положения (положение перемычки). Такое решение делает возможным выталкивание груза С передней направляющей рамкой в вертикальном положении, при этом задняя направляющая рамка создает перемычку к загрузочной платформе в горизонтальном положении. Такое решение обеспечивает плавный переход груза С с роликов отделения системы 400 к загрузочной платформе 140 подъемного узла 110. Такая конструкция также имеет зазор или промежуток между концом опорных направляющих 402 и загрузочной платформой 140 для приема подъемной двери для работы в отделении и полного закрытия доступа к отделению.
[0075] Задняя направляющая рамка 422 поддерживается в вертикальном положении, опираясь на опорную направляющую (направляющие) 402, подобно проиллюстрированной на фиг. 27 передней направляющей рамке 402. Однако когда задняя рамка 422 достигает конца опорной направляющей (направляющих) 402, примыкающей к задней части отделения для хранения, то верхняя поверхность опорной направляющей закругляется в переходной части 430 и переходит в направлении нижней поверхности опорной направляющей так, что перемещение в продольном направлении назад задней направляющей рамки изменяет расположение задней направляющей рамки от вертикального положения/положения проталкивания груза (фиг. 26) до горизонтального положения/положения образования перемычки (на фиг. 28 показан переход в направлении горизонтального положения). Наоборот, когда задняя рамка 422 продвигается гибким приводным элементом в продольном направлении вперед, то задняя направляющая рамка перемещается по закругленной переходной части, в результате чего задняя направляющая рамка поворачивается из горизонтального положения образования перемычки (фиг. 28) к вертикальному/положению проталкивания груза (фиг. 26).
[0076] В приведенном описании используются примеры для описания изобретения, включая лучший режим, а также для того, чтобы дать возможность любому специалисту в данной области техники создать и использовать изобретение. Подразумевается, что другие примеры, которые встречаются специалистам в данной области техники, подпадают под объем правовой охраны изобретения, если они содержат конструктивные элементы, которые не отличаются от той же концепции или которые не отличаются от буквального языка формулы изобретения, или если они содержат эквивалентные конструктивные элементы с несущественными отличиями от той же концепции или буквального языка формулы изобретения. Кроме того, это изобретение предназначено для поиска защиты для сочетания компонентов и/или этапов и сочетания пунктов формулы изобретения, первоначально представленных для рассмотрения, а также для поиска потенциальной защиты для других сочетаний компонентов и/или этапов и сочетаний пунктов формулы изобретения во время судебного преследования.
[0077] Несмотря на то, что выше перечислены конкретные преимущества, тем не менее, различные варианты выполнения могут содержать некоторые, никакие, или все из перечисленных преимуществ. Хотя иллюстративные варианты выполнения проиллюстрированы на чертежах и описаны в данном документе, тем не менее, принципы настоящего изобретения могут быть реализованы с использованием любого количества способов, независимо от того, известны они в настоящее время или нет. Более того, работы систем и устройств, раскрытых в данном документе, могут быть выполнены большим количеством, меньшим количеством или другими компонентами, а описанные в данном документе способы могут включать большее количество, меньшее количество или другие этапы. Кроме того, этапы могут быть выполнены в любом подходящем порядке.
[0078] Чтобы помочь патентному ведомству и любым читателям этой заявки и любого полученного патента в интерпретации прилагаемой формулы изобретения, заявителями не подразумевается отсылка прилагаемых пунктов формулы изобретения или элементов формулы изобретения на раздел 35 Кодекса законов США (35 USC 112(f)), если только слова «средство для» или «этап для» явно не используются в конкретном пункте формулы изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ПОГРУЗКИ ГРУЗОВОГО АВТОМОБИЛЯ | 2019 |
|
RU2784834C2 |
| Устройство доставки и извлечения, способ и применения | 2013 |
|
RU2628418C2 |
| СИСТЕМА ДЛЯ ПОГРУЗКИ НЕУПАКОВАННОГО ГРУЗА В ГРУЗОВОЙ ОТСЕК САМОЛЕТА И ВЫГРУЗКИ НЕУПАКОВАННОГО ГРУЗА ИЗ ГРУЗОВОГО ОТСЕКА САМОЛЕТА И ИСПОЛЬЗУЕМЫЕ ДЛЯ ЭТОГО СРЕДСТВО ПРОМЕЖУТОЧНОГО КОНВЕЙЕРА И БЛОК КОНВЕЙЕРА | 2003 |
|
RU2312044C2 |
| РОБОТИЗИРОВАННЫЙ МОБИЛЬНЫЙ КУРЬЕРСКИЙ КОМПЛЕКС | 2022 |
|
RU2787547C1 |
| ПОДЪЕМНИК | 2005 |
|
RU2405733C2 |
| ГРУЗОВОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2010 |
|
RU2556769C2 |
| Грузовой трюм судна для перевозки плавучих грузов | 1982 |
|
SU1022865A1 |
| СПОСОБ И СИСТЕМА ДЛЯ ИЗГОТОВЛЕНИЯ ДОСТАВОЧНОЙ УПАКОВКИ | 2013 |
|
RU2604560C2 |
| Устройство для перегрузки тарных грузов | 1987 |
|
SU1532485A1 |
| ТРАНСПОРТНО-НАКОПИТЕЛЬНОЕ УСТРОЙСТВО | 1991 |
|
RU2108222C1 |
Изобретение относится к системам погрузки или выгрузки груза. Система погрузки или выгрузки груза для грузового транспортного средства содержит отделение для хранения, устройство отделения для хранения, подъемный узел. Отделение для хранения имеет группу отсеков, в которых хранится груз. Устройство отделения для хранения расположено в каждом отсеке. Подъемный узел подвижно прикреплен к отделению и содержит конвейер, платформу и монтажный узел. Монтажный узел подвижно прикрепляет подъемный узел к отделению для хранения, содержит первые и вторые вертикальные и горизонтальные направляющие элементы. Каждый горизонтальный элемент имеет первый и второй концы, присоединенные к вертикальным элементам и выполненные с возможностью перемещения по вертикали. Платформа прикреплена к первому и второму горизонтальным элементам и выполнена с возможностью перемещения вдоль них между первым и вторым вертикальными элементами. Конвейер подъемного узла содержит первую и вторую секции, разделенные зазором, и толкатель, проходящий через зазор и выполненный с возможностью взаимодействия с грузом, принятым на платформу. Достигается возможность автономной погрузки или выгрузки грузов, состоящих из неодинаковых предметов или из предметов различного типа, размеров, веса. 4 н. и 39 з.п. ф-лы, 28 ил.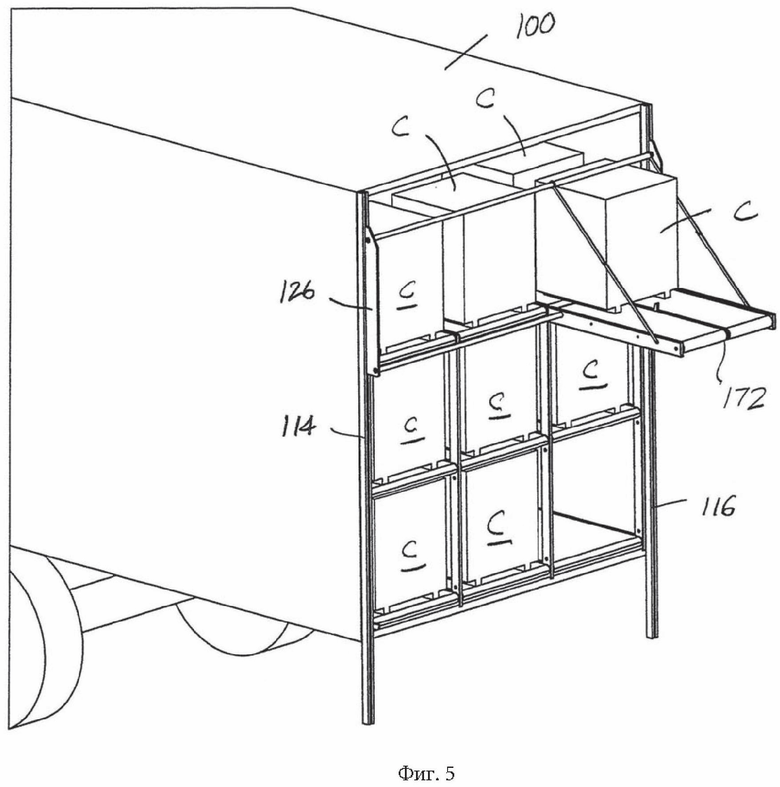
1. Система погрузки или выгрузки груза для грузового транспортного средства, содержащая
отделение для хранения, имеющее группу отсеков соответствующего транспортного средства, в котором хранится соответствующий груз, принятый из проема в отделении для хранения или поданный через этот проем,
устройство отделения для хранения, расположенное в каждом отсеке отделения и выполненное с обеспечением помощи при подаче соответствующего груза из отсека отделения или при приеме соответствующего груза в отсек отделения,
подъемный узел, подвижно прикрепленный к отделению для хранения и выполненный с возможностью приема соответствующего груза из отсека отделения, причем подъемный узел содержит конвейер, который принимает соответствующий груз из отсека отделения или подает соответствующий груз в отсек отделения, причем подъемный узел содержит платформу, которая принимает соответствующий груз из одного из отсеков отделения или подает соответствующий груз в один из отсеков отделения, и
монтажный узел, который подвижно прикрепляет подъемный узел к отделению для хранения, при этом монтажный узел содержит первый и второй вертикальные направляющие элементы, расположенные в разнесенных по горизонтали местах отделения для хранения, и первый и второй горизонтальные направляющие элементы в разнесенных по вертикали местах, причем каждый горизонтальный направляющий элемент имеет первый и второй концы, присоединенные к вертикальным направляющим элементам и выполненные с возможностью перемещения по вертикали относительно них, причем платформа прикреплена к первому и второму горизонтальным направляющим элементам и выполнена с возможностью перемещения вдоль них между первым и вторым вертикальными направляющими элементами, благодаря чему платформа может быть расположена у выбранного отсека отделения группы.
2. Система по п.1, в которой платформа имеет первый край, прикрепленный с возможностью поворота ко второму горизонтальному направляющему элементу, благодаря чему обеспечена возможность перемещения платформы между первым, вертикальным, положением хранения и вторым, горизонтальным, развернутым положением.
3. Система по п.2, дополнительно содержащая по меньшей мере один рычажный механизм, который содержит первое звено и второе звено, причем первый конец первого звена прикреплен к первому горизонтальному направляющему элементу, а первый конец второго звена прикреплен ко второму краю платформы, при этом вторые концы первого и второго звеньев шарнирно соединены друг с другом.
4. Система по п.1, в которой платформа подвижно прикреплена к первому и второму горизонтальным элементам так, что платформа может перемещаться в боковом направлении относительно отсеков отделения.
5. Система по п.4, в которой платформа подвижно прикреплена к первому и второму вертикальным элементам так, что платформа может перемещаться по вертикали относительно отсеков отделения.
6. Система по п.1, в которой платформа подвижно прикреплена к первому и второму вертикальным элементам так, что платформа может перемещаться по вертикали относительно отсеков отделения.
7. Система по п.6, в которой размеры монтажного узла выбраны с обеспечением возможности перемещения платформы к горизонтальному местоположению ниже отсеков отделения.
8. Система по п.1, в которой платформа содержит конвейер подъемного узла, функционально связанный с платформой.
9. Система погрузки или выгрузки груза для грузового транспортного средства, содержащая
отделение для хранения, имеющее по меньшей мере один отсек соответствующего транспортного средства, в котором хранится соответствующий груз, принятый из проема в отделении для хранения или поданный через этот проем,
устройство отделения для хранения, расположенное в каждом отсеке отделения и выполненное с обеспечением помощи при подаче соответствующего груза из отсека отделения или при приеме соответствующего груза в отсек отделения,
подъемный узел, подвижно прикрепленный к отделению для хранения и выполненный с возможностью приема соответствующего груза из отсека отделения, причем подъемный узел содержит платформу, которая принимает соответствующий груз из одного из отсеков отделения или подает соответствующий груз в один из отсеков отделения, причем подъемный узел также содержит конвейер, который принимает соответствующий груз из отсека отделения или подает соответствующий груз в отсек отделения, при этом конвейер подъемного узла содержит первую и вторую секции, разделенные зазором, и толкатель, проходящий через зазор и выполненный с возможностью взаимодействия с соответствующим грузом, принятым на платформу, и обеспечения перемещения первого компонента соответствующего груза относительно второго компонента соответствующего груза.
10. Система по п.9, в которой толкатель установлен с возможностью перемещения вместе с первой и второй секциями конвейера.
11. Система по п.9, в которой толкатель утяжелен и установлен на платформе таким образом, что он проходит выше поверхности ленты первой и второй секций конвейера на протяжении первой части пути секций конвейера и располагается ниже поверхности ленты на протяжении второй части пути секций конвейера.
12. Система по п.9, дополнительно содержащая монтажный узел, который подвижно прикрепляет подъемный узел к отделению для хранения, при этом монтажный узел содержит первый и второй вертикальные направляющие элементы, расположенные в разнесенных по горизонтали местах отделения для хранения, и первый и второй горизонтальные направляющие элементы в разнесенных по вертикали местах, причем каждый горизонтальный направляющий элемент имеет первый и второй концы, присоединенные к вертикальным направляющим элементам и выполненные с возможностью перемещения по вертикали относительно них, причем платформа прикреплена к первому и второму горизонтальным направляющим элементам и выполнена с возможностью перемещения вдоль них между первым и вторым вертикальными направляющими элементами, благодаря чему платформа может быть расположена у выбранного отсека отделения группы.
13. Система по п.1, в которой группа отсеков отделения для хранения разделена с образованием группы отсеков по меньшей мере два по высоте на два по ширине.
14. Система погрузки или выгрузки груза для грузового транспортного средства, содержащая
отделение для хранения, имеющее группу отсеков соответствующего транспортного средства, в котором хранится соответствующий груз, принятый из проема в отделении для хранения или поданный через этот проем,
подъемный узел, выполненный с возможностью приема соответствующего груза из отсека отделения для хранения, причем подъемный узел содержит платформу, которая принимает соответствующий груз из отсека отделения или подает соответствующий груз в отсек отделения, и
монтажный узел, который с возможностью перемещения прикрепляет подъемный узел к отделению для хранения и содержит первый и второй вертикальные направляющие элементы, расположенные в разнесенных по горизонтали местах отделения для хранения, и первый и второй горизонтальные направляющие элементы в разнесенных по вертикали местах, причем каждый из указанных горизонтальных элементов имеет первый и второй концы, которые присоединены к вертикальным направляющим элементам и выполнены с возможностью перемещения по вертикали относительно них, причем платформа прикреплена к первому и второму горизонтальным направляющим элементам и выполнена с возможностью перемещения вдоль них между первым и вторым вертикальными направляющими элементами, благодаря чему платформа может быть расположена у выбранного отсека отделения группы.
15. Система по п.14, в которой подъемный узел содержит конвейер, функционально связанный с платформой.
16. Система по п.15, дополнительно содержащая датчик для контроля перемещения соответствующего груза с конвейера отсека отделения на конвейер подъемного узла.
17. Система по п.16, дополнительно содержащая первый двигатель, функционально связанный с конвейером по меньшей мере одного из отсеков отделения, второй двигатель, функционально связанный с конвейером подъемного узла, и контроллер, который сообщается с подъемным узлом, монтажным узлом, датчиком, первым двигателем и вторым двигателем и разворачивает и убирает на хранение платформу, перемещает платформу между отсеками отделения и под отсеками отделения, контролирует положение первого соответствующего груза относительно соседнего второго соответствующего груза и в зависимости от промежутка между первым и вторым соответствующими грузами прекращает движение конвейера отсека отделения, чтобы отделить первый и второй соответствующий грузы на конвейере подъемного узла.
18. Система по п.14, в которой группа отсеков отделения для хранения разделена с образованием группы отсеков по меньшей мере два по высоте на два по ширине.
19. Система по п.1, в которой устройство отделения для хранения содержит ролики, поддерживаемые на их противоположных концах опорными направляющими, и по меньшей мере первую направляющую рамку для проталкивания соответствующего груза по роликам в отделение и из него.
20. Система по п.19, дополнительно содержащая вторую направляющую рамку для проталкивания соответствующего груза по роликам в отделение и из него.
21. Система по п.20, в которой первая и вторая направляющие рамки перемещаются с помощью соответственно, первого и второго двигателей, которые приводят в действие соответственно первый и второй гибкие приводные элементы, в которых размещены соответственно первая и вторая направляющие рамки.
22. Система по п.21, в которой по меньшей мере одна из опорных направляющих имеет переходную часть, которая функционально взаимодействует со второй направляющей рамкой для переустановки второй направляющей рамки между вертикальным положением проталкивания груза и горизонтальным положением образования перемычки.
23. Система по п.19, дополнительно содержащая первый и второй двигатели для индивидуального приведения в действие соответственно первой и второй направляющих рамок.
24. Система по п.23, в которой работа первого и второго двигателей может использоваться для приложения сжимающего усилия к соответствующему грузу, принятому на роликах между первой и второй направляющими рамками.
25. Система по п.24, в которой после сжатия соответствующего груза между первой и второй направляющими рамками первый и второй двигатели могут работать вместе для перемещения груза в отделении вперед и назад.
26. Система по п.1, дополнительно содержащая рычаг, который избирательно взаимодействует с краем платформы для приложения к нему крутящего момента и поворота платформы из горизонтального развернутого положения в вертикальное положение хранения.
27. Способ погрузки соответствующего груза на соответствующее грузовое транспортное средство или выгрузки соответствующего груза из соответствующего грузового транспортного средства, которое содержит отделение для хранения, имеющее отсеки, размеры которых выбраны с обеспечением возможности размещения в них груза, первый двигатель, функционально связанный с конвейером по меньшей мере одного из отсеков отделения, подъемный узел, содержащий платформу с конвейером подъемного узла и прикрепленный к отделению для хранения с помощью монтажного узла, который содержит первый и второй вертикальные направляющие элементы, расположенные в разнесенных по горизонтали местах отделения для хранения, и первый и второй горизонтальные направляющие элементы в разнесенных по вертикали местах, причем каждый горизонтальный направляющий элемент имеет первый и второй концы, присоединенные к вертикальным направляющим элементам, датчик, второй двигатель, функционально связанный с конвейером подъемного узла, и контроллер, сообщающийся с подъемным узлом, монтажным узлом, датчиком, первым двигателем, функционально связанным с отсеками отделения, и вторым двигателем, функционально связанным с конвейером подъемного узла, причем указанный способ включает
разворачивание платформы и убирание платформы на хранение,
прикрепление платформы к первому и второму горизонтальным направляющим элементам для относительного перемещения по горизонтали вдоль них между первым и вторым вертикальными направляющими элементами,
перемещение платформы между отсеками отделения, причем на этапе перемещения поднимают и опускают платформу между вертикально разнесенными отсеками отделения и/или перемещают платформу в боковом направлении между горизонтально разнесенными отсеками отделения, и
перенос соответствующего груза из отсека отделения на платформу и/или на поверхность земли.
28. Способ по п.27, в котором на этапе переноса перемещают соответствующий груз из отсеков отделения на поверхность земли в место под отсеками отделения.
29. Способ по п.27, в котором определяют положение соответствующего груза во время этапа переноса и обеспечивают работу конвейера отсека отделения и конвейера подъемного узла для разделения первого и второго компонентов соответствующего груза.
30. Способ по п.27, в котором дополнительно перемещают платформу между положением хранения и развернутым положением.
31. Способ по п.30, в котором при перемещении платформы поворачивают платформу между вертикальным положением, определяющим положение хранения, и горизонтальным положением, определяющим развернутое положение.
32. Способ по п.27, в котором система дополнительно содержит дверь, причем в способе дополнительно открывают и закрывают дверь для обеспечения избирательного доступа в отделение для хранения.
33. Способ по п.27, в котором конвейер подъемного узла работает при большей скорости, чем конвейер отсека отделения, для отделения первого соответствующего груза и соседнего второго соответствующего груза.
34. Способ по п.27, в котором конвейер подъемного узла содержит первую и вторую секции, разделенные зазором, и толкатель, причем в способе дополнительно обеспечивают взаимодействие толкателя с соответствующим грузом для обеспечения помощи при перемещении соответствующего груза, принятого на конвейер подъемного узла.
35. Способ по п.34, в котором дополнительно располагают толкатель между первой и второй секциями конвейера.
36. Способ по п.34, в котором дополнительно пропускают толкатель в наружном направлении от поверхностей первой и второй секций конвейера во время первой части перемещения секций конвейера и не пропускают толкатель в наружном направлении от поверхностей первой и второй секций конвейера во время первой части перемещения секций конвейера.
37. Способ по п.27, в котором устройство отделения для хранения содержит ролики, поддерживаемые на их противоположных концах опорными направляющими, и по меньшей мере первую направляющую рамку, причем в способе проталкивают соответствующий груз по роликам в отделение или из него с помощью первой направляющей рамки.
38. Способ по п.37, в котором устройство отделения для хранения содержит вторую направляющую рамку, при этом в способе проталкивают соответствующий груз по роликам в отделение или из него.
39. Способ по п.38, в котором устройство отделения для хранения содержит первый и второй двигатели и присоединенные соответственно к ним первый и второй гибкие приводные элементы, которые присоединены соответственно к первой и второй направляющим рамкам и приводят в движение первую и вторую направляющие рамки.
40. Способ по п.39, в котором дополнительно избирательно изменяют положение второй направляющей рамки между вертикальным положением проталкивания груза и горизонтальным положением для образования перемычки.
41. Способ по п.37, в котором дополнительно независимо приводят в движение первую и вторую направляющие рамки с помощью первого и второго двигателей для независимого перемещения направляющих рамок.
42. Способ по п.41, в котором дополнительно обеспечивают работу первого и второго двигателей для приложения сжимающего усилия к соответствующему грузу, принятому на роликах между первой и второй направляющими рамками.
43. Способ по п.42, в котором дополнительно перемещают соответствующий груз вперед или назад в отделении после сжатия соответствующего груза между первой и второй направляющими рамками.
| DE 102017003815 A1, 26.10.2017 | |||
| US 4930969 A, 05.06.1990 | |||
| Способ приготовления мыла | 1923 |
|
SU2004A1 |
| US 5868544 A, 09.02.1999. | |||

