Область техники
Заявляемое техническое решение относится к автоматической системе по приему и переработке бытовых отходов, а именно бутылок, изготовленных из полиэтилентерефталата (PET, PETE, терефталат или полиэстер), и из стекла для уменьшения объема перед транспортировкой, хранением, и последующей переработкой, позволяющее накапливать отходы в небольших объемах и упаковывать в запечатанные пакеты и/или мягкие контейнеры.
Заявляемое устройство может быть использовано, как на специальных площадках по переработке отходов, так и в общественных местах первоначального накопления и сбора отходов, например, местах массовых мероприятий, предприятиях общественного питания, местах длительной остановки или стоянки различных видов транспорта.
Уровень техники
Известны различные устройства для сбора и переработки бутылок, например, установка для сплющивания использованных ПЭТ бутылок (Патент на полезную модель РФ 50909), содержащая корпус, внутри которого расположено устройство для прокалывания и сжатия ПЭТ бутылок, представляющее собой мнущие шестерни, при этом не менее одного зуба на каждой мнущей шестерне отсутствует. Недостатками подобных решений является не рациональное использование полезной площади установки (принимается мало бутылок) и необходимость переработки и размельчения на следующих стадиях.
Известны:
СПОСОБ ПЕРЕРАБОТКИ ОТХОДОВ ПОЛИЭТИЛЕНТЕРЕФТАЛАТА В ПОРОШКООБРАЗНЫЙ ПРОДУКТ, патент РФ № 2384592, характеризующийся повышенной растворимостью в неконцентрированном водном щелочном растворе, включающий термообработку отходов в среде, содержащей паровой компонент, и измельчение термообработанных отходов, при этом термообработку отходов проводят в замкнутом герметизированном объеме, в качестве среды используют смесь парового компонента, выделяющегося из отходов полиэтилентерефталата при термообработке, и содержащегося в объеме атмосферного воздуха, а термообработку осуществляют посредством выдержки при постоянной температуре «t», удовлетворяющей условиям 160°Ct<200°C и при избыточном давлении парового компонента и воздуха, равном 1,5-4,5 кгс/см2, в течение 20-40 ч. Недостатками данного решения является сложности соблюдения условий осуществления и трудоемкости как самого процесса так и ремонтопригодности самих установок.
СПОСОБ РАЗДЕЛЕНИЯ МАТЕРИАЛОВ, заявка ВОИС № WO 2016016623, заключающийся в разделении смеси материалов с использованием разделительной среды внутри сосуда, имеющего центральную перегородку, которая перемещает смесь путем колебания перегородки с частотой и амплитудой. Смесь материалов может иметь перекрывающиеся плотности с разделяющей средой, имеющей плотность в перекрывающейся области. Полимеры ПЭ и ГШ могут быть разделены на хлопья. Для смеси материалов разной плотности вода может быть средой разделения. Шагглинг сочетается с управлением потоком воды через сосуд с заданной скоростью.
СПОСОБ И УСТРОЙСТВО ДЛЯ ПЕРЕРАБОТКИ ИСПОЛЬЗОВАННЫХ ПЭТ-БУТЫЛОК патент РФ № 2349451, заключающиеся в измельчении бутылок в полимерные хлопья, с последующим сортированием полимерных хлопьев по их толщине, по меньшей мере, на два количества, дополнительным измельчением первого количества с толстыми хлопьями и объединении, по меньшей мере, два количества. Устройство для переработки использованных ПЭТ-бутылок содержит установку для измельчения пластиковых емкостей в полимерные хлопья, установку для сортировки полимерных хлопьев по одному критерию на два количества и установку для стерилизации части полимерных хлопьев. Кроме того, предусмотренную для обработки установку для стерилизации и/или повторного измельчения части полимерных хлопьев. С помощью способа и устройства, согласно изобретению, можно отделить труднее очищаемые полимерные хлопья резьбовой части ПЭТ-бутылки от легче очищаемых тонких полимерных хлопьев стенки бутылки и подвергнуть дальнейшей обработке на собственных этапах обработки.
Недостатками описанных решений является перемешивание двух разных видов пластика: крышки, обычно изготавливаемой из полипропилена или полиэтилена, и бутылки, изготавливаемой из полиэтилентерефталата.
Известно УСТРОЙСТВО ДЛЯ ПЕРЕРАБОТКИ РАЗЛИЧНЫХ ПЛАСТМАССОВЫХ ОТХОДОВ ДЛЯ ПОЛУЧЕНИЯ МАТРИЧНОГО МАТЕРИАЛА ИЛИ КОМПОЗИЦИОННОГО МАТЕРИАЛА, заявка ВОИС № WO 2009106905, изобретение относится к устройству для переработки различных пластиковых отходов с получением матричного или композиционного материала. Устройство (1) имеет блок (14) теплопередачи, состоящий из внутренней поверхности (131) тепловой камеры (13) и элементов (141), расположенных между внутренними поверхностями (131), снабженных колющими наконечниками или режущими кромками. Смесительный барабан (23) гомогенизирующей машины (2), пригодный для измельчения поступающих пластиковых отходов, имеет по крайней мере два ротора (233), движущихся вместе с двумя параллельными осями (2331), имеющими лопасти (2332) и подшипник, удерживающий лист (2333), на внешней поверхности ротора (233) находится перемещающее устройство (234), содержащее приводной стержень (2341), перемещающий стержень (2342) и нажимную пластину (2343), облегчающие перемещение гомогенизированный материал, Гомогенизирующая машина (2) содержит подвижное устройство (25), которое позволяет управлять перемещением перемещающего устройства (234) внутрь и наружу. Данное решение не относится к сбору, упаковке и сортировки бутылок пи сама переработка осуществляется путем нагревания.
Известен Аппаратно-программный комплекс по приему полиэтиленовых бутылок и алюминиевых банок, Патент РФ № 2727549, содержащий по меньшей мере один корпус, в котором размещены отсек распознавания тары, содержащий как минимум одну видеокамеру, микроконтроллер, выполненный с возможностью обработки первичных данных для распознавания тары и выдачи команд исполнительным механизмам на прием тары и выплату вознаграждения или отказ в указанных операциях, отсек хранения тары и средство выдачи вознаграждения, при этом на корпусе установлен ручной компактор, а микроконтроллер выполнен с возможностью распознавания спрессованной тары, движущейся по лотку, или выполнен с возможностью связи с удаленным сервером, по меньшей мере, для передачи на сервер информации, позволяющей распознать тару, и получения команд от сервера на прием тары, или выплату вознаграждения, или на отказ в указанных операциях.
Недостатками данного решения являются недостаточно плотная упаковка принимаемого аппаратно-программным комплексом сырья и зависимость от сервера при работе устройства.
Известен АВТОМАТ ПО ПРИЕМУ ТАРЫ по патенту РФ № 188755, содержащий корпус, отсек распознавания тары с размещенными в нем устройством, собирающим информацию о распознаваемом предмете, и устройством распознавания тары микроконтроллером, отсек хранения тары и средство выдачи вознаграждения, при этом в качестве устройства, собирающего информацию о распознаваемом предмете, он содержит как минимум одну видеокамеру, а микроконтроллер содержит в памяти алгоритм нейронной сети, позволяющей распознавать тару.
Ближайшим (принятым за прототип) к заявляемому решению является устройство для сортировки, измельчения и кондиционирования отходов по патенту ЕПВ № ЕР0 600808. Данное устройство для сортировки измельчения и кондиционирования отходов от аналогов отличается тем, что содержит по крайней мере два основных блока, каждый из которых состоит из определенного блока ввода конкретного блока дробления, конкретного блока хранения и блока кондиционирования, вводимые отходы в блок ввода, который измельчается в блоке измельчения, а затем временно хранится в блоке хранения перед сбросом в блок кондиционирования. При этом каждый конкретный входной блок имеет калиброванное отверстие, позволяющее пропускать отходы определенного материала и предотвращающее переход к отходам из другого материала или иначе, так, в частности, калиброванное отверстие для пластиковой упаковки имеет параллелепипед с изогнутым V-образным основанием для облегчения доступа и направления пластиковых бутылок.
Недостатками данного и предыдущего решения является невозможность разделения разного вида и цвета материалов.
Раскрытие изобретения
Технической проблемой, на решение которой направлено заявляемое изобретение, является создание мобильного устройства, позволяющего осуществлять сбор и первичный этап переработки вторичного сырья (ПЭТ и стеклянных бутылок) на месте его установки, первичную сортировку вторичного сырья - отделение пробки (от пластиковой бутылки), упаковку вторичного сырья в емкости, пригодные для непосредственной сдачи на заводы по переработке вторсырья и для встраивания в существующие технологические цепочки.
Технический результат заявленного изобретения заключается в том, что заявляемое устройство позволяет осуществлять эффективный уплотнительный сбор, разделение и сортировку бутылок по различным материалам за счет применения системы определения цвета и материала.
Для достижения указанного технического результата предлагается автоматическое устройство сбора, сортировки и переработке пластиковых и стеклянных бутылок характеризующееся тем, что содержит корпус с внутренним каркасом и передней панелью на боковой поверхности, обращенной к пользователю на которой расположены окно камеры приема, дисплей и хоппер, на нижнем основании корпуса расположена с возможностью выкатывания выдвижная платформа, виброгасители, расположенные на выдвижной платформе, дробилку, платформу размещения контейнера, расположенную на виброгасителях с установленным датчиком веса, с возможностью размещения мягкого контейнера и снабженную площадкой для вибродвигателя, мягкий контейнер со стропами для зацепа, кронштейны зацепа, установленные на стойках каркаса, камеру приема, установленную на балку, жестко закрепленную на корпусе внутри верхнего основания, поворотный двигатель камеры приема установленный на балке и обращенный валом вниз, датчик веса с жестким креплением с камерой приема, установленный на вале поворотного двигателя, камеру приема с вертикально ориентированным отверстием совпадающим с окном приема и с отсеком распознавания выполненным в форме полого цилиндра в нижнем основании которого имеется отверстие, большее на 1-10 мм диаметра горлышка и/или пробки бутылки, верхнее основание выполнено в виде крышки, которая закреплена пружиной закрепленной к верхней части камеры приема, датчик расстояния, установленный в нижней грани верхнего цилиндра камеры приема над центром окружности крышки отсека распознавания камеры приема внутри окружности пружины сжатия, при этом центры корпусов камеры приема и отсека распознавания камеры приема находятся на одной прямой, корпус отсека распознавания камеры приема меньше по диаметру, чем корпус камеры приема и совпадает по высоте, на противоположной окну камеры приема части боковой поверхности камеры приема и части нижнего основания имеется сквозное вертикально ориентированное на боковой поверхности и совпадающее с радиусом на нижнем основании прямоугольное отверстие, необходимое для прохождения рычага механизма выталкивания, который представлен рычагом закрепленным на вал шагового электродвигателя при этом корпус шагового двигателя выталкивателя крепится к внутренней части нижнего основания камеры приема под отверстием размещения горлышка бутылки находится кронштейн тактовой кнопки с тактовой кнопкой, в нижней части отсека распознавания камеры приема имеются технологические отверстия, расположенные напротив друг друга для обеспечения функционирования датчика цвета и источника света расположенные снаружи отсека распознавания камеры приема напротив друг друга.
В предпочтительном варианте:
на нижнем основании корпуса изнутри имеются ограничители для предотвращения выкатывания выдвижной платформы;
в нижней части отсека распознавания установлен отделитель пробки;
ниже отделителя пробки установлен мягкий контейнер или емкость для сбора отрезанных крышек.
Совокупность приведенных выше существенных признаков приводит к тому, что предложенное решение позволяет:
осуществлять наиболее компактную упаковку сдаваемого сырья способом вибротрамбовки;
отделять различные виды пластика при сдаче (в случае отрезания пробок от ПЭТ бутылок);
осуществлять первый этап переработки вторичного сырья (ПЭТ и стеклянных бутылок) - дробление и упаковку в мягкие контейнеры на месте, внутри корпуса автомата;
Краткое описание чертежей
На фигуре 1 и 2 показаны схемы заявляемого устройства, внешний вид, где позициями обозначены:
1 - передняя панель,
2 - окно камеры приема,
3 - окно выдачи монет,
4 - окно выдачи чеков,
5 - шарнирная петля,
6 - замок створки.
На фиг. 3 показана схема заявляемого устройства, где позициями обозначены:
7 - камера приема,
8 - балка крепления камеры приема,
9 - поворотный двигатель камеры приема,
10 - датчик веса,
11 - кронштейн тактовой кнопки,
12 - отделитель пробок,
13 - дробилка с крепежным блоком,
14 - мягкий контейнер (big bag),
15 - вибродвигатель,
16 - платформа размещения мягкого контейнера,
17 - виброгасители,
18 - выдвижная платформа,
19 - ролики выдвижной платформы,
20 – ограничители.
На фиг. 4 показана схема камеры приема, где позициями обозначены:
1 - передняя панель,
2 - окно камеры приема,
23 - ПЭТ или стеклянная бутылка,
34 - датчик цвета,
35 - источник света,
На фиг. 5 показана внутренняя схема устройства, вид сверху, где позициями обозначены:
3 - окно выдачи монет,
5 - шарнирная петля,
6 - замок створки,
7 - камера приема,
8 - балка крепления камеры приема,
12 - отделитель пробок,
13 - дробилка с крепежным блоком,
14 - мягкий контейнер (big bag),
15 - вибродвигатель,
18 - выдвижная платформа,
21 - стропы мягкого контейнера,
22 - кронштейн зацепа строп мягкого контейнера.
На фиг. 6 показана схема заявляемого устройства, где позициями обозначены:
1 - передняя панель,
8 - балка крепления камеры приема,
9 - поворотный двигатель камеры приема,
10 - датчик веса,
11 - кронштейн тактовой кнопки,
12 - отделитель пробок,
23 - ПЭТ или стеклянная бутылка,
25 - отсек распознавания камеры приема,
26 - крышка камеры распознавания,
27 - пружина сжатия,
28 - датчик расстояния,
29 - поворотный двигатель выталкивателя,
30 - выталкиватель,
31 - тактовая кнопка,
33 - держатель нити накаливания.
На фиг. 7 показана схема устройства с элементами распознавания и отделения пробки, где позициями обозначены:
1 - передняя панель,
7 - камера приема,
11 - кронштейн тактовой кнопки,
12 - отделитель пробок,
24 - отверстие свободного прохода выталкивателя,
25 - отсек распознавания камеры приема,
30 - выталкиватель,
31 - тактовая кнопка,
32 - отверстие размещения горлышка бутылки,
33 - держатель нити накаливания,
34 - датчик цвета,
35 - источник света.
На фиг. 8 показана схема дробилки в зависимости от принимаемого устройством объекта - ротор с молотками (для стеклянных бутылок), ротор с ножами (для пластиковых бутылок).
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Описание устройства-автомата и работы отдельных его узлов.
Ниже приведен пример конкретного выполнения устройства, который не ограничивает варианты его исполнения.
Заявляемое решение позволяет принимать, распознавать и перерабатывать бутылки, изготовленные из полиэтилентерефталата (PET, PETE, терефталат или полиэстер), и из стекла бутылки следующих размеров: от 0,5 литра до 2 литров или схожего размера в иных системах измерения.
Описание работы устройства и его узлов
Определения
Заявляемое автоматическое устройство (автомат) по сбору, сортировке и переработке бутылок - роботизированный агрегат, предназначенный для приема бутылок у пользователей, распознаванию, сортировке, переработке путем дробления и упаковке в мягкие контейнеры;
Оператор – человек, осуществляющий контроль и управление устройством; Пользователь – человек, осуществляющий сдачу ПЭТ (полиэтиленгликольтерефталат) или иных бутылок, в т.ч. стеклянных; Программируемый логический контроллер (ПЛК) - представляет собой микропроцессорное устройство, предназначенное для сбора, преобразования, обработки, хранения информации и выработки команд управления, имеющий конечное количество входов и выходов, подключенных к ним датчиков, ключей, исполнительных механизмов к объекту управления, и предназначенный для работы в режимах реального времени;
Принимаемый объект - бутылка, изготовленная из ПЭТ или стекла, объемом от 0,5 до 2 литров.
Флекс (разг. - флекса; англ. flakes - хлопья) - кусочки пластмассы мелкой фракции, продукт измельчения пластиков при переработке; стеклобой (стеклянный лом) - непригодные для прямого использования изделия или части изделий из стекла, которые потеряли эксплуатационную ценность, а также изделия с непоправимым недостатком, остатки от производства и обработки стеклянных изделий, битое бытовое и промышленное стекло.
Хоппер (hopper) - это устройство для хранения и выдачи монет (жетонов).
Устройство включает в себя следующие элементы:
1 - передняя панель - грань корпуса, обращенная к пользователю, имеющая технологические отверстия - окно камеры приема, окно выдачи монет, окно выдачи чеков. Имеющее шарнирные петли на одной стороне, примыкающей к боковой грани и запирающее устройство (замок) навесного или врезного типа.
2 - окно камеры приема - технологическое отверстие в камере приема для помещения в него бутылки (принимаемого объекта). Совпадает с окном камеры распознавания, являясь одним и тем же отверстием.
3 - окно выдачи монет - технологическое отверстие для выдачи с помощью специального устройства (хоппера) денежного вознаграждения пользователю в виде монет.
4 - окно выдачи чеков - технологическое отверстие в передней панели для выдачи чеков либо талонов пользователю с помощью принтера чеков.
5 - шарнирная петля - цилиндрическое шарнирное соединение, предназначенное для навески дверей или откидных деталей.
6 - замок створки - устройство запирания передней панели.
7 - камера приема - технологический узел для распознавания и перемещения принимаемого объекта внутри устройства.
8 - балка крепления камеры приема - конструктивный элемент корпуса автомата для крепления камеры приема, ее поворотного механизма и датчика веса.
9 - поворотный двигатель камеры приема - шаговый электродвигатель, предназначенный для поворота (камеры приема) в необходимое для функционирования устройства положение.
10 - датчик веса - тензометрический датчик, преобразующий величину деформации в электрический сигнал.
11 - кронштейн тактовой кнопки - опорная деталь необходимая для позиционирования и фиксации тактовой кнопки под отверстием размещения горлышка бутылки.
12 - отделитель пробок - конструктивный элемент, состоящий из кронштейна и держателя нити накаливания, необходимый для отделения закрученных на ПЭТ бутылки пробок.
13 - дробилка с крепежным блоком - устройство фиг. 8, предназначенное для механического разрушения с целью измельчения твердого предмета (в описываемом изобретении устройство для измельчения пластиковых и стеклянных бутылок). Крепежный блок при этом представляет собой систему кронштейнов, жестко фиксирующих дробилку внутри корпуса устройства.
14 - мягкий контейнер - (flexible intermediate bulk container (FIBC), bulk bag, или big bag) - стандартный контейнер из полипропиленовой ткани, применяемый для хранения и транспортировки сухих сыпучих пищевых и не пищевых продуктов и материалов. Размерами и конструкцией подходящий под требования завода по переработке вторичного сырья.
15 - вибродвигатель - устройство для генерации колебательных движений.
16 - платформа размещения мягкого контейнера - жесткая плита, предназначенная для установки мягкого контейнера и его позиционирования внутри корпуса устройства, снабженная монтажной платформой для установки вибродвигателя.
17 - виброгаситель, - устройство, снижающее величину и амплитуду механических колебаний (генерируемых вибромотором), наряду с которыми между платформой размещения мягкого контейнера и выдвижной платформой на одном из виброгасителей 17 (центральном) монтируется датчик веса, определяющий количество накопленного в мягком контейнере ПЭТ флексы.
18 - выдвижная платформа - жесткая плита, снабженная грузовыми роликами, предназначенная для выдвижения заполненного мягкого контейнера за пределы корпуса устройства для удобства его забора.
19 - ролики выдвижной платформы - механические приспособления, выполняющие функцию колеса, обеспечивающие способность перемещения выдвижной платформы.
20 - ограничители - детали, ограничивающие движение выдвижной платформы 18.
21 - стропы мягкого контейнера - элементы конструкции, предназначенные для грузозахвата.
22 - кронштейн зацепа строп мягкого контейнера - механический элемент внутри корпуса устройства, расположенный на гранях, выполненный в виде крюка. Предназначенный для зацепа строп мягкого контейнера с целью его позиционирования внутри корпуса.
23 - ПЭТ или стеклянная бутылка - емкость для долговременного хранения жидкостей.
24 - отверстие свободного прохода выталкивателя - отверстие обеспечивающее ход выталкивателя.
25 - отсек распознавания камеры приема - технологический узел камеры приема с группой датчиков, предназначенный для определения, помещенного внутрь него объекта. Выполнен в форме прямого цилиндра, позиционированного вертикально, полого внутри. В нижнем основании имеющий отверстие размещения горлышка бутылки. Верхнее основание отсутствует.
26 - крышка отсека распознавания камеры приема - плоская деталь, выполненная из жесткого материала, устанавливаемая вместо отсутствующего основания отсека распознавания, имеющая свободный ход по вертикали.
27 - пружина сжатия - пружина, расположенная между крышкой отсека распознавания камеры приема и верхним основанием камеры приема, обеспечивающая монтаж крышки отсека распознавания камеры приема.
28 - датчик расстояния - электронное устройство определения расстояния между крышкой отсека распознавания камеры приема и основанием камеры приема.
29 - шаговый электродвигатель, предназначенный для поворота рычага выталкивателя в необходимое положение.
30 - выталкиватель - механизм, состоящий из шагового двигателя с закрепленным на его вале рычагом, обеспечивающий поднятие и извлечение бутылки из камеры распознавания после отрезания пробки.
31 - тактовая кнопка.
32 - отверстие размещения горлышка бутылки - отверстие в нижнем основании камеры распознавания, в которое попадает горлышко бутылки при ее помещении в камеру распознавания.
33 - держатель нити накаливания - часть отделителя пробки, предназначенная для монтажа нити накаливания и поддержания ее натяжения.
34 - датчик цвета - электронное устройство определения цвета предмета, помещенного в камеру распознавания.
35 - источник света.
Корпус устройства фиг. 1, 2 может быть кубической формы либо формы прямоугольного параллелепипеда, установленного на меньшее основание. Внутри находится каркас из металла (на чертежах не показан) или иного схожего по прочности материала. Нижнее основание устанавливается на подготовленную поверхность. Устройство выполнено с возможностью подключения к сети электропитания, или с возможностью подзарядке накопителей электроэнергии при их наличии.
На грани корпуса устройства, обращенной к пользователю фиг. 1 (передней панели 1), находятся: окно 2 камеры приема 7, дисплей не показан на фигурах, устройство выдачи денег, монет (хоппер) 3, устройство печати чеков или талонов 4 (при необходимости), информационные материалы и инструкция по эксплуатации.
На нижнем основании корпуса изнутри фиг. 3 имеются ограничители 20 для предотвращения выкатывания выдвижной платформы 18 дальше необходимого расстояния.
Выдвижная платформа 18 представляет собой прямоугольную пластину из металла или иного подходящего по прочности материала. На нее крепятся грузовые ролики 19 выдвижной платформы, способные выдержать вес заполненного мягкого контейнера. На выдвижную платформу 18 крепятся виброгасители 17, на которые монтируется платформа 16 размещения мягкого контейнера 14. Минимальное количество виброгасителей 17-5 штук, при этом 4 штуки устанавливаются ближе к углам платформы размещения мягкого контейнера 16, а пятый виброгаситель устанавливается по центру платформы размещения мягкого контейнера 16. Между данным виброгасителем и выдвижной платформой монтируется датчик веса. В качестве последнего можно использовать тензодатчик CAS MNT https://mashintertorg.ru/tenzodatchik-1000-kg/tenzodatchik-cas-mnt?sort=p.price&order=ASC. Указанный датчик позволяет определять вес накопленного в мягком контейнере 14 продукта дробления, что позволяет контроллеру устройства дать сигнал оператору о его заполнении.
Платформа 16 размещения мягкого контейнера 14 снабжена площадкой для монтажа вибро-двигателя 15. На платформу 16 размещения мягкого контейнера 14 устанавливается мягкий контейнер 14 для сбора продукта дробления - ПЭТ флексы, стеклобоя.
Изнутри устройства фиг. 5 на стойках каркаса (не указаны на чертежах), расположенных у вертикальных граней, имеются кронштейны зацепа 22 строп 21 мягкого контейнера 14, выполненные в виде крюков. Предназначенные для правильного позиционирования мягкого контейнера 14 внутри корпуса устройства.
Извлечение заполненного мягкого контейнера 14 осуществляется при помощи выкатывания выдвижной платформы 18 и удаления с нее мягкого контейнера 14 с помощью грузозахватного механизма (не показан на чертежах).
После извлечения заполненного мягкого контейнера 14 из корпуса устройства на его место устанавливается новый пустой контейнер. Заполненный контейнер 14 транспортируется на склад или к месту переработки.
Окно 2 камеры приема 7 представляет собой отверстие в корпусе устройства полуовальной формы, ориентированное вертикально, диаметром больше диаметра помещаемых в него бутылок. Через окно приема объект попадает в камеру приема 7.
Камера приема 7 фиг. 4 - технологический узел для распознавания и перемещения принимаемого объекта внутри устройства. Распознавание предмета, помещенного в автомат, осуществляется с помощью интерпретации сигналов получаемых от группы датчиков контроллером устройства. Камера приема 7 крепится внутри корпуса устройства на балку крепления камеры приема 8, расположенную изнутри верхнего основания корпуса, крепление балки осуществляется непосредственно к корпусу. На данную балку крепится поворотный двигатель камеры приема 9, обращенный валом вниз. В качестве последнего можно использовать шаговый двигатель стандарта NEMA с имеющимися на корпусе монтажными отверстиями https://www.astrosyn.com/product/my23hy1-3-astrosyn-stepper-motor. К балке крепления камеры приема или к внутренней части верхней грани корпуса автомата в необходимом месте жестким (сварным) соединением вертикально крепятся 4 шпильки с винтовой резьбой таким образом, чтобы было возможно вставить их в монтажные отверстия на корпусе шагового двигателя. На данные шпильки накручиваются гайки для фиксации корпуса поворотного двигателя камеры приема 9.
К валу поворотного двигателя камеры приема крепится датчик веса 10. Способ крепления зависит от конструкции корпуса датчика веса, предпочтительно использование винтового соединения.
К датчику веса предпочтительно винтовым соединением крепиться камера приема 7.
Транспортировка бутылки внутри корпуса устройства осуществляется поворотом камеры приема 7 с помощью поворотного двигателя камеры приема 9 относительно оси вращения по часовой или против часовой стрелки на 180 градусов от окна приема 2 на корпусе устройства.
На боковой поверхности цилиндра корпуса камеры приема 7 имеется окно 2 камеры приема 7 - отверстие полуовальной формы, ориентированное вертикально. В данное отверстие 2 помещается бутылка. При повороте камеры приема 7 к окну приема 2 на корпусе устройства данные отверстия совпадают.
Камера приема 7 представляет собой, изготовленный из металла, пластика, дерева и любого подходящего материала полый тонкостенный цилиндр. Камера приема 7 включает в себя отсек распознавания 25 камеры приема 7.
Отсек распознавания 25 камеры приема 7 - технологический узел с группой датчиков, предназначенный для определения, помещенного внутрь него объекта (стеклянной или ПЭТ бутылки). В данный отсек попадают предметы, помещаемые пользователем в устройство. Выполнен в форме прямого цилиндра, позиционированного вертикально, полого внутри. В нижнем основании цилиндра имеется отверстие, диаметром достаточным для помещения в него горлышка бутылки с пробкой (минимум на 1 мм больше диаметра пробки и/или горлышка максимально не более 10 мм). В данное отверстие помещается бутылка горлышком вниз. При этом крышка от бутылки не откручивается.
Верхнее основание отсека 25 распознавания камеры приема 7 не соединено с боковой поверхностью (является цилиндром) крепится только пружиной (висит на ней), которая крепится к верхней части камеры приема и вертикально подвижно образуя крышку 26 отсека распознавания камеры приема Фиг. 6. верхнее основание цилиндра корпуса отсека 25 распознавания камеры приема 7 с помощью пружины сжатия 27 крепится к верхнему основанию камеры приема 7 (Фиг. 6). При этом пружина 27 монтируется с одной стороны на внешнюю часть крышки 26 отсека распознавания камеры приема 25, а с другой стороны на внутреннею часть камеры приема. Диаметр пружины 27 немного меньше диаметра корпуса отсека распознавания камеры приема, что позволяет центрировать верхнее основание отсека распознавания камеры приема. Крепление пружины 27 осуществляется с помощью зацепа конечных (опорных) витков к указанным поверхностям с помощью деталей - зацепов (не показаны на чертежах). Зацепы - металлические детали с преобладающей длиной над шириной крепящиеся с одной стороны к поверхностям: крышке отсека камеры распознавания и внутренней части камеры приема жестким соединением (сварным винтовым и т.д.), с другой стороны загнуты от поверхности, на которую крепятся, образуя крюк, позволяющий зацепить конечные витки пружины.
К нижней грани верхнего цилиндра камеры приема над центром окружности крышки отсека распознавания камеры приема 26 внутри окружности пружины сжатия крепится датчик расстояния 28. Крепление осуществляется с помощью шурупов, закрученных через монтажные отверстия корпуса датчика расстояния в корпус камеры распознавания. Например, можно использовать устройство аналогичное https://mcustore.ru/store/datchiki-i-sensory/datchik-rasstovaniya-lazernyj-v15310x-gv-530/?frommarket=&vmclid=16344627006867280180600007
Центры корпусов (цилиндров) камеры приема 7 и отсека распознавания 25 камеры приема 7 находятся на одной прямой. Корпус отсека распознавания 25 камеры приема 7 меньше по диаметру, чем корпус камеры приема 7 и совпадает по высоте. Таким образом, предмет, помещенный в устройство, попадает в окно загрузки камеры приема 7 и в отсек распознавания 25 камеры приема 7.
На противоположной окну камеры приема 2 части боковой поверхности камеры приема 7 и части нижнего основания имеется сквозное вертикально ориентированное на боковой поверхности и совпадающее с радиусом на нижнем основании прямоугольное отверстие 24 фиг. 7 с преобладающей длиной над шириной. Данное отверстие 24 необходимо для прохождения рычага механизма выталкивания 30. При этом описанное отверстие 24 и отверстие размещения горлышка бутылки 32 объединены.
Выталкиватель 30 представляет собой рычаг, одним концом закрепленный на вал шагового электродвигателя 29. В качестве последнего можно использовать устройство https://fastbox.su/serwo-mg-996r---metal-mg996-item-i7705422242.html
На конце закрепляемого на выходной вал двигателя рычага имеется отверстие с зубцами снаружи, ответные зубцы имеются на вале двигателя. С помощью данных зубцов осуществляется передача усилия от вала двигателя к рычагу. Вал двигателя - это часть редуктора, которая выведена за пределы корпуса мотора и непосредственно приводится в движение при подаче управляющих сигналов и представляет собой пластиковый или металлический стержень. В центре данного стержня вдоль оси вращения имеется отверстие с резьбой для соединения. После того, как рычаг помещается на вал двигателя, он закрепляется для предотвращения соскакивания с вала в резьбовое отверстие в вале двигателя закручивается винт, края головки которого шире, чем края тела детали рычага и механически предотвращают его соскакивание с вала.
Корпус поворотного двигателя выталкивателя 29 крепится к внутренней части нижнего основания камеры приема 7 с помощью кронштейнов либо хомутов (скоб) (не указаны на чертежах). Кронштейны либо хомуты (скобы - крепежные детали в виде изогнутого, обычно в виде дуги или буквы П, металлического прутка или полосы) жестко крепятся к корпусу камеры приема (сварным, винтовым) соединением. При применении хомутов (скоб) в месте их крепления в камере приема проделываются отверстия (не представлены на чертеже), в которые продеваются концы скоб, которые расклепываются, привариваются к корпусу камеры приема либо на них нарезается резьба для резьбового соединения и навинчиваются гайки.
Механизм выталкивания 30 Фиг. 6 необходим для транспортировки бутылки с отрезанным горлышком из камеры приема 7 в дробилку 13. Корпус электродвигателя механизма выталкивания 30 жестко крепится на внутреннюю поверхность нижнего основания камеры приема 7 изнутри, вне отсека распознавания 25 камеры приема. Вал двигателя располагается перпендикулярно радиусу отсека распознавания 25 камеры приема и камеры приема 7. Рычаг механизма выталкивания 30 имеет два положения в первом положении, рычаг опущен вертикально вниз, что дает возможность пользователю поместить бутылку в окно камеры приема. Во втором положении, при повороте вала поворотного двигателя выталкивателя 29, рычаг поворачивается вверх в вертикальной плоскости внутрь отсека распознавания камеры приема. При срабатывании поворотного двигателя выталкивателя 29 его рычаг преодолевает сопротивление пружины 21 (описанной в конструкции отсека распознавания камеры приема), при этом крышка отсека распознавания камеры приема, приподнимает бутылку, преодолевая сопротивление пружины сжатия 27, и выталкивает ее из отсека распознавания камеры приема.
Под отверстием размещения горлышка бутылки 32 находится кронштейн тактовой кнопки 11 с тактовой кнопкой 31. При помещении бутылки в камеру распознавания пробка бутылки упирается в тактовую кнопку 31, нажимая ее. В случае со стеклянной бутылкой, где отсутствует пробка, поверхность тактовой кнопки 31 выполняется достаточного размера для нажатия при помещении горлышка бутылки.
В нижней части отсека распознавания 25 камеры приема 7 имеются технологические отверстия, расположенные напротив друг друга для обеспечения функционирования датчика цвета 34 и источника света 35. Данные детали 34 и 35 располагаются снаружи отсека распознавания камеры приема 25 напротив друг друга. С помощью датчика света 34 происходит распознавание цвета бутылки для их сортировки по цветам.
Камера приема 7 имеет два рабочих положения: режим ожидания и рабочий режим. В режиме ожидания камера приема 7 повернута окном загрузки к дробилке 13. При этом окно загрузки на корпусе устройства-автомата закрыто частью корпуса камеры приема 7. В рабочем режиме камера приема 7 поворачивается на 180 градусов от дробилки 13 к окну приема на корпусе устройства, и пользователь может осуществить сдачу бутылок, после чего происходит их распознавание, и камера приема 7 поворачивается к дробилке, с помощью чего осуществляется транспортировка бутылки.
Отделитель пробки
Используется в конструкции, предназначенной для сборки ПЭТ бутылок. В случае использования устройства для сбора стеклянных бутылок данный конструктивный элемент отсутствует.
При транспортировке бутылки внутри корпуса-автомата происходит механическое отделение пробки от бутылки. Отделение пробки осуществляется с помощью отделителя пробок 12 - являющегося терморезаком фиг. 7. Отделение пробки происходит нагретой металлической проволокой - нитью. При этом нить разогревается до температуры, позволяющей расплавить пластик бутылки. Отделение пробки происходит с частью горлышка, впоследствии различный пластик (горлышка и пробки) сортируется вручную. Отделитель пробки 12 является кронштейном (на фигурах не показан) закрепленным с одной стороны к лицевой панели устройства-автомата ниже камеры приема 7 под углом относительно балки 8 крепления камеры приема, таким образом, что при повороте камеры приема траектория горлышка бутылки пересекает нить накаливания. На другой стороне кронштейна находится держатель 33 нити накаливания. Держатель 33 выполнен в форме вил с двумя зубьями. К одному из зубьев крепится нить накаливания, к которой крепится пружина сжатия, которая другим концом крепится к противоположному зубу. Разогрев нити осуществляется с помощью подачи электрического тока, при этом нить имеет большое электрическое сопротивление, в результате чего происходит нагрев. Под отделителем пробки соосно отсеку распознавания устанавливается емкость либо с помощью строп и держателей мягкий контейнер (бумажный/целлофановый пакет) на фигурах не показаны для сбора отрезанных пробок.
Отделение пробки также может выполняться различными способами: пилением многолезвийным пильным полотном (циркулярной пилой), отрезанием однолезвийным (ножом) или двух лезвийным приспособлением (ножницами). При этом конструкция отделителя пробки не меняется. При разных способах отрезания держатель нити накаливания заменяется на конструкцию, подходящую для функционирования описанных способов.
Устройство отрезания горлышка устанавливается на траектории следования бутылки при транспортировке в камере приема 7 (Фиг. 7) на максимально возможном удалении от пользователя (зависит от габаритов устройства).
Дробилка 13
Представлена стандартным (заводским) решением фиг. 8 может представлять собой любое устройство, предназначенное для измельчения твердого материала (ПЭТ и стеклянных бутылок и проч.) При подборе дробилки 13 необходимо руководствоваться требованиями заводов по переработке вторичного сырья. Фиг. 8 Дробилка расположена ниже камеры приема выше мягкого контейнера (big bag) 14, чтобы обеспечить максимальное заполнение мягкого контейнера 14 продуктом дробления. Дробилка крепится в раму с помощью винтовых крепежных элементов (не показаны на чертежах). Указанная рама крепится сварным соединением к верхним граням корпуса устройства.
Так как камера приема находится выше дробилки, после срабатывания механизма выталкивателя 30, бутылка, находящаяся внутри, под собственным весом падает в дробилку 13.
При этом дробилка находится выше мягкого контейнера 14 и продукт дробления под собственным весом падает в него.
Накопление дробленой фракции.
После измельчения бутылки до нужной по размеру фракции продукт дробления под собственным весом падает из дробилки в установленный ниже мягкий контейнер 14 (big bag). Мягкий контейнер 14 дном устанавливается на вибростол - платформу размещения мягкого контейнера 16, а его стропы 21, зацепляются на кронштейны стоек каркаса устройства-автомата. При этом основной вес содержимого контейнера сосредоточен на вибростоле, а стропы 21 зацеплены за кронштейны для правильного позиционирования контейнера внутри корпуса устройства.
После накопления определенного веса продукта дробления внутри мягкого контейнера 14 и последующих циклах срабатывания дробилки 13 начинает включаться вибромотор (вибродвигатель) 15, установленный на вибростоле. Значение веса продукта дробления и количество циклов срабатывания вибромотора 15 задается программой или оператором.
После заполнения мягкого контейнера (накопления необходимого веса продукта дробления), контроллер устройства связывается с оператором посредством мобильной (сотовой) радиосвязи либо с помощью электронной почты (SMPP или SMPT протоколы) или с помощью иного вида связи и сигнализирует оператору о необходимости замены мягкого контейнера.
Примеры осуществления
Ниже приведен пример конкретного выполнения устройства, который не ограничивает варианты его исполнения.
Краткое описание порядка работы автомата
L. Пользователь помещает объект (бутылку) в окно приема 2 согласно инструкции.
2. В случае определения датчиками отсека распознавания 25 и камеры приема объекта, как бутылка, камера приема 7 поворачивается на 180 градусов от окна приема.
3. В ходе движения бутылки ее горлышко (в случае с ПЭТ бутылкой) проходит через разогретую нить накаливания отделителя пробок 12, при этом часть горлышка с пробкой отделяются.
4. После поворота камеры приема на 180 градусов от окна приема срабатывает выталкиватель 30, рычаг которого преодолевает сопротивление пружины в отсеке распознавания камеры приема 25 и бутылка сбрасывается в дробилку 13.
5. Дробленый пластик (ПЭТ флекса) на выходе из дробилки 13 падает и накапливается в мягком контейнере 14 (big bag) заранее установленном в устройстве-автомате.
5.1. После накопления заданного оператором или программой количества килограммов флексы, либо после определенного оператором или программой количества срабатываний, с некоторой периодичностью начинает включаться вибродвигатель 15 для трамбовки флексы в мягком контейнере 14.
6. Пользователю выплачивается вознаграждение в виде наличных денег из хоппера 3 в сумме кратной сданному весу бутылок, устанавливаемой оператором.
7. При наличии требования законодательства выдается документ о сдаче (чек, талон) вторсырья.
8. После заполнения мягкого контейнера 14 контроллер устройства связывается с оператором и сигнализирует о необходимости замены контейнера.
Этапы работы автомата с описанием функционирования элементов
1. Пользователь подходит к устройству - в этот момент срабатывает датчик движения (не показан на чертежах) либо кнопку инициации (не показана на чертежах), происходит опрос датчиков камеры приема 7, включается источник света 35.
2. Камера приема поворачивается окном 2 камеры приема к пользователю.
3. Пользователь помещает объект (ПЭТ или стеклянную бутылку) в окно 2 камеры приема.
4. Одновременно срабатывают несколько датчиков и нажимается тактовая кнопка: датчик цвета 34 определяет изменение интенсивности попадающего на него света и (или) опознает изменение цвета отличного от белого (номинального); датчик веса 10 фиксирует изменение веса камеры; датчик расстояния 28 фиксирует изменившееся расстояние между крышкой 26 отсека распознавания и верхним основанием камеры приема 7, автомат определяет попавший в камеру предмет, как бутылку.
5. Камера приема 7 поворачивается на 180 градусов от пользователя, при этом происходит отделение части горлышка с пробкой.
6. После этого срабатывает поворотный двигатель 29 выталкивателя 30, и бутылка падает в дробилку 13.
7. После попадания бутылки в дробилку 13 последняя работает определенное для переработки бутылки время.
8. Продукт дробления под собственным весом падает в мягкий контейнер 14.
9. После определенного оператором или программой количества срабатываний, начинает включаться вибродвигатель 15, установленный на платформе размещения мягкого контейнера 16 для трамбовки продукта дробления.
10. При накоплении необходимого количества (продукта дробления) контроллер устройства связывается с оператором и сигнализирует о необходимости забора накопленного продукта дробления и замены мягкого контейнера 14.
11. Для извлечения контейнера 14 передняя панель 1 устройства открывается с помощью шарнирных петель 5. Стропы мягкого контейнера 14 снимаются с кронштейна зацепа строп мягкого контейнера 22. Мягкий контейнер 14 выкатывается за пределы корпуса на выдвижной платформе 18. При этом ограничители 20 препятствуют излишнему выдвижению платформы 18 во избежание аварийных ситуаций. Мягкий контейнер 14 перемещается на грузовую платформу автотранспорта.
Минимальный объем размещенной пользователем бутылки 23 составляет 0,2 литра при этом ее размеры: высота -350 мм, диаметр - 90 мм, диаметр кольца у горлышка 3,4 мм.
Максимальный объем размещенной пользователем бутылки составляет 2 литра.
| название | год | авторы | номер документа |
|---|---|---|---|
| Автомат по приему пластиковой тары, прессованию и сортировке ее по цвету и пресс для прессования тары | 2022 |
|
RU2796790C1 |
| Аппаратно-программный комплекс по приему полиэтиленовых бутылок и алюминиевых банок | 2019 |
|
RU2727549C1 |
| УСТРОЙСТВО СЕПАРАЦИИ ИЗМЕЛЬЧЕННЫХ ПОЛИМЕРНЫХ ОТХОДОВ | 2016 |
|
RU2640453C1 |
| УСТРОЙСТВО ДЛЯ УПАКОВКИ ЖИДКОГО ПИЩЕВОГО ПРОДУКТА | 2009 |
|
RU2496692C2 |
| УСТРОЙСТВО ДЛЯ СОЕДИНЕНИЯ ПОТРЕБИТЕЛЬСКОЙ ЕМКОСТИ С МОЛОКОПРОВОДОМ ТОРГОВОГО АВТОМАТА ДЛЯ ПОРЦИОННОГО РОЗЛИВА ЖИДКИХ ПИЩЕВЫХ ПРОДУКТОВ | 2015 |
|
RU2589605C1 |
| АВТОМАТ ДЛЯ ПРИЕМА ИСПОЛЬЗОВАННОЙ БУТЫЛОЧНОЙ ТАРЫ | 2016 |
|
RU2639065C2 |
| ТЕРМОПЛАСТИЧНЫЙ КОНТЕЙНЕР ДЛЯ ХРАНЕНИЯ ПИЩЕВЫХ ПРОДУКТОВ, ТЕРМОПЛАСТИЧНАЯ БУТЫЛКА И СПОСОБ ЕЕ ИЗГОТОВЛЕНИЯ, МНОГОСЛОЙНЫЙ ТЕРМОПЛАСТИЧНЫЙ КОНТЕЙНЕР | 1997 |
|
RU2189337C2 |
| ПРОЦЕСС И ОБОРУДОВАНИЕ ДЛЯ ИЗГОТОВЛЕНИЯ СТЕКЛЯННОГО КОНТЕЙНЕРА С ГОРЛЫШКОМ, ИМЕЮЩИМ ВНУТРЕННЮЮ РЕЗЬБУ | 2011 |
|
RU2564293C2 |
| СТЕКЛЯННЫЙ КОНТЕЙНЕР С ГОРЛЫШКОМ, ИМЕЮЩИМ ВНУТРЕННЮЮ РЕЗЬБУ | 2011 |
|
RU2562501C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ УПАКОВКИ ЖИДКОГО ПИЩЕВОГО ПРОДУКТА | 2009 |
|
RU2496693C2 |







Изобретение относится к устройствам и автоматическим системам по приему и переработке бытовых отходов, а именно бутылок, изготовленных из полиэтилентерефталата и из стекла, для уменьшения объема перед транспортировкой, хранением и последующей переработкой. Автоматическое устройство сбора, сортировки и переработки пластиковых и стеклянных бутылок содержит корпус с внутренним каркасом и передней панелью на боковой поверхности, обращенной к пользователю. На панели расположены окно камеры приема, дисплей и хоппер. На нижнем основании корпуса расположена с возможностью выкатывания выдвижная платформа, виброгасители, расположенные на выдвижной платформе. Система включает дробилку, платформу размещения контейнера, расположенную на виброгасителях с установленным датчиком веса, с возможностью размещения мягкого контейнера и снабженную площадкой для вибродвигателя. Система также содержит мягкий контейнер со стропами для зацепа, кронштейны зацепа, установленные на стойках каркаса, камеру приема, установленную на балку, жестко закрепленную на корпусе внутри верхнего основания, поворотный двигатель камеры приема, установленный на балке и обращенный валом вниз, датчик веса с жестким креплением с камерой приема, установленный на вале поворотного двигателя. Камера приема выполнена с вертикально ориентированным отверстием, совпадающим с окном приема и с отсеком распознавания, выполненным в форме полого цилиндра, в нижнем основании которого имеется отверстие, большее на 1-10 мм диаметра горлышка и/или пробки бутылки. Верхнее основание цилиндра выполнено в виде крышки, которая закреплена пружиной, закрепленной к верхней части камеры приема. Датчик расстояния установлен в нижней грани верхнего цилиндра камеры приема над центром окружности крышки отсека распознавания камеры приема внутри окружности пружины сжатия. При этом центры корпусов камеры приема и отсека распознавания камеры приема находятся на одной прямой, а корпус отсека распознавания камеры приема меньше по диаметру, чем корпус камеры приема и совпадает по высоте. На противоположной окну камеры приема части боковой поверхности камеры приема и части нижнего основания имеется сквозное вертикально ориентированное на боковой поверхности и совпадающее с радиусом на нижнем основании прямоугольное отверстие, необходимое для прохождения рычага механизма выталкивания, который представлен рычагом, закрепленным на вал шагового электродвигателя. При этом корпус шагового двигателя выталкивателя крепится к внутренней части нижнего основания камеры приема, а под отверстием размещения горлышка бутылки находится кронштейн тактовой кнопки с тактовой кнопкой. В нижней части отсека распознавания камеры приема имеются технологические отверстия, расположенные напротив друг друга для обеспечения функционирования датчика цвета и источника света, расположенные снаружи отсека распознавания камеры приема напротив друг друга. Изобретение обеспечивает осуществление эффективного уплотнительного сбора, разделения и сортировки бутылок по различным материалам. 3 з.п. ф-лы, 8 ил.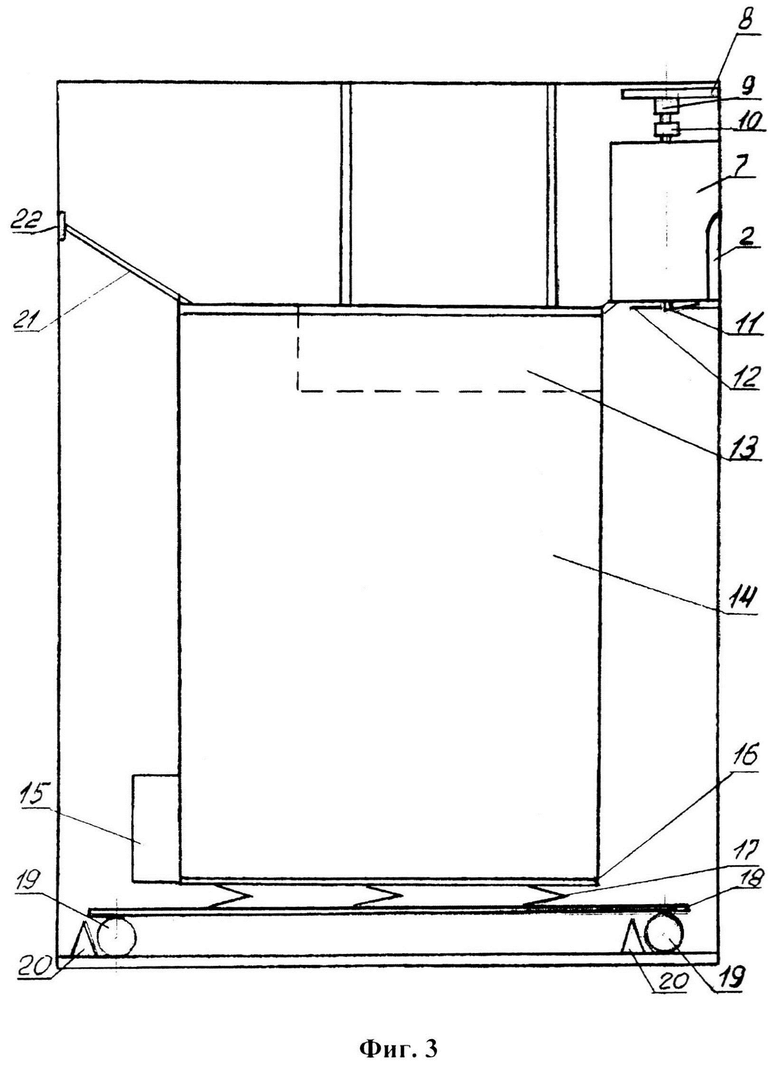
1. Автоматическое устройство сбора, сортировки и переработки пластиковых и стеклянных бутылок, характеризующееся тем, что содержит корпус с внутренним каркасом и передней панелью на боковой поверхности, обращенной к пользователю, на которой расположены окно камеры приема, дисплей и хоппер, на нижнем основании корпуса расположена с возможностью выкатывания выдвижная платформа, виброгасители, расположенные на выдвижной платформе, дробилку, платформу размещения контейнера, расположенную на виброгасителях с установленным датчиком веса, с возможностью размещения мягкого контейнера и снабженную площадкой для вибродвигателя, мягкий контейнер со стропами для зацепа, кронштейны зацепа, установленные на стойках каркаса, камеру приема, установленную на балку, жестко закрепленную на корпусе внутри верхнего основания, поворотный двигатель камеры приема, установленный на балке и обращенный валом вниз, датчик веса с жестким креплением с камерой приема, установленный на вале поворотного двигателя, камеру приема с вертикально ориентированным отверстием, совпадающим с окном приема и с отсеком распознавания, выполненным в форме полого цилиндра, в нижнем основании которого имеется отверстие, большее на 1-10 мм диаметра горлышка и/или пробки бутылки, верхнее основание выполнено в виде крышки, которая закреплена пружиной, закрепленной к верхней части камеры приема, датчик расстояния, установленный в нижней грани верхнего цилиндра камеры приема над центром окружности крышки отсека распознавания камеры приема внутри окружности пружины сжатия, при этом центры корпусов камеры приема и отсека распознавания камеры приема находятся на одной прямой, корпус отсека распознавания камеры приема меньше по диаметру, чем корпус камеры приема и совпадает по высоте, на противоположной окну камеры приема части боковой поверхности камеры приема и части нижнего основания имеется сквозное вертикально ориентированное на боковой поверхности и совпадающее с радиусом на нижнем основании прямоугольное отверстие, необходимое для прохождения рычага механизма выталкивания, который представлен рычагом, закрепленным на вал шагового электродвигателя, при этом корпус шагового двигателя выталкивателя крепится к внутренней части нижнего основания камеры приема, под отверстием размещения горлышка бутылки находится кронштейн тактовой кнопки с тактовой кнопкой, в нижней части отсека распознавания камеры приема имеются технологические отверстия, расположенные напротив друг друга для обеспечения функционирования датчика цвета и источника света, расположенные снаружи отсека распознавания камеры приема напротив друг друга.
2. Автоматическое устройство по п. 1, отличающиеся тем, что на нижнем основании корпуса изнутри имеются ограничители для предотвращения выкатывания выдвижной платформы.
3. Автоматическое устройство по п. 1, отличающиеся тем, что в нижней части отсека распознавания установлен отделитель пробки.
4. Автоматическое устройство по пп. 1, 3, отличающиеся тем, что ниже отделителя пробки установлен мягкий контейнер или емкость для сбора отрезанных крышек.
| Шлюзовый затвор | 1971 |
|
SU600808A1 |
| Устройство для автоматической остановки прядильных, трепальных и тому подобных машин | 1938 |
|
SU55179A1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ КОРРЕЛЯТОР | 0 |
|
SU188755A1 |
| Аппаратно-программный комплекс по приему полиэтиленовых бутылок и алюминиевых банок | 2019 |
|
RU2727549C1 |
| СПОСОБ ПОЛУЧЕНИЯ ПРЕПАРАТА «ГУМИЗОЛЬ» | 0 |
|
SU197870A1 |
| US 5111927 A1, 12.05.1992 | |||
| JP 11070526 A, 16.03.1999. | |||

