Данное изобретение касается способа регулирования частоты вращения центробежного насоса, эксплуатируемого в гидравлическом контуре, при котором регулятор системы управления насосом определяет заданную частоту вращения привода насоса с учетом заданного и фактического значений напора, а также фактической частоты вращения.
Современные центробежные насосы с регулированием частоты вращения согласно уровню техники для определения заданной частоты вращения используют преимущественно пропорциональный интегрирующий регулятор (ПИ-регулятор). Посредством пропорциональной составляющей (П-составляющей) можно установить, как быстро насос достигает своего заданного значения. Посредством интегрирующей составляющей (И-составляющая) можно установить, насколько динамично должны устраняться установившиеся ошибки регулирования. При интегрирующей составляющей, равной нулю, всегда остается установившаяся ошибка регулирования.
Поскольку конфигурация обоих параметров регулятора оказывает влияние на динамику всей системы, то регулирование параметров регулятора можно осуществлять не раздельно, а лишь при целостном рассмотрении динамики системы. Поэтому на практике правильная установка этих параметров представляет собой огромную проблему. Классические стандарты регулирования для ПИ-регуляторов или пропорциональных интегрирующих-дифференцирующих регуляторов с предварением (ПИД-регуляторы) касаются линейных систем, в противном случае необходимо было бы производить предварительную линеаризацию в рабочей точке. В последнем случае найденные параметры регулятора обычно оптимально установлены лишь вблизи выбранной рабочей точки.
Исходя из вышеуказанных причин, применение пропорционального интегрирующего регулятора для центробежного насоса с регулированием частоты вращения не является оптимальным решением. Во-первых, насосы обладают сильно нелинейными параметрами, во-вторых, насосы должны иметь возможность стабильной эксплуатации в различных рабочих диапазонах. Например, рабочая точка при запуске насоса может быть другой, чем во время постоянной работы насоса. Настройка параметров ПИ-регулятора или, соответственно, пропорционального интегрирующего-дифференцирующего регулятора с предварением, следовательно, всегда базируется на компромиссе между этими разными рабочими точками насоса.
Из-за описанной выше проблематики уже были опробованы другие подходы к регулированию. Примером являются так называемые регуляторы аффинности, которые работают на основе законов аффинности. Эти типы регуляторов являются надежными, в частности, в различных рабочих ситуациях и делают рассмотренную выше трудоемкую настройку параметров регулятора неактуальной. Однако, являющиеся недостатком ограничения этого типа регуляторов заключаются в том, что до сих пор их можно было использовать только в замкнутых гидравлических контурах. В открытом контуре, в котором при известных условиях требуется преодолевать геодезическую высоту, изменяется математическая взаимосвязь между указанными величинами, и регулировка не приводит к удовлетворительному результату.
В европейской заявке ЕР 2944821 А1 раскрыт способ энергосберегающего регулирования скорости насосного агрегата.
В публикации WO 2014/040627 А1 раскрыт способ эксплуатации подключенных параллельно циркуляционных насосов.
Поэтому для решения вышеназванной проблемы подыскивается подходящая модификация управления.
Эта задача решается посредством способа с признаками независимого пункта 1 формулы изобретения. Предпочтительные варианты осуществления этого способа являются предметом зависимых пунктов формулы.
Согласно изобретению, предлагается способ регулирования частоты вращения центробежного насоса, эксплуатируемого в гидравлическом контуре. В основу этого способа положен регулятор системы управления насосом, который вычисляет заданную частоту вращения привода насоса с учетом заданного и фактического значений напора, а также фактической частоты вращения. Этот регулятор не является ни пропорциональным интегрирующим, ни пропорциональным интегрирующим-дифференцирующим регулятором с предварением. Эта модификация регулятора предусматривает модификацию на по меньшей мере один поправочный коэффициент для учета и компенсации преодолеваемой насосом геодезической высоты. С помощью этого поправочного коэффициента можно использовать эту концепцию регулирования также и для открытых гидравлических контуров.
Особенно предпочтительно, если посредством этого поправочного коэффициента оказывается влияние на смещение кривой «напор-частота вращения», в частности, вызывается вертикальное смещение кривой «напор-частота вращения». Благодаря этому геодезическая высота может быть без проблем скомпенсирована.
Предлагаемая концепция регулирования для определения заданного значения или, соответственно, величины регулирующего воздействия использует закон аффинности, и такой тип регуляторов далее называется регуляторами аффинности. Согласно предпочтительному варианту осуществления эта концепция регулирования исходит из квадратичной зависимости между частотой вращения и напором для вычисления величины регулирующего воздействия. Таким образом, получается регулировочная кривая параболической формы, которая посредством указанного поправочного коэффициента смещается по выбору вверх или, соответственно, вниз.
Далее, предпочтительно у таких типов регуляторов для вычисления заданной частоты вращения квадратичная зависимость между заданной частотой вращения и заданным значением напора ставится в соотношение с квадратичной зависимостью между фактической частотой вращения и фактическим значением напора. Исходя из этого соотношения может определяться заданная частота вращения. Путем инверсирования квадратичной зависимости может одновременно компенсироваться нелинейное поведение насоса. Благодаря этому насос можно стабилизировать как линейную систему.
Согласно еще одному предпочтительному варианту осуществления изобретения парабола регулировочной кривой, определенная посредством квадратичной зависимости между частотой вращения и напором, может смещаться за счет поправочного коэффициента в начало координат, вследствие чего геодезическая высота может компенсироваться либо на напорной стороне, либо на стороне всасывания насоса.
На практике поправочный коэффициент зависит от характеристик всей гидравлической системы. Геодезическая высота и, тем самым, требуемое значение поправочного коэффициента могут изменяться во время работы насоса. По этой причине желательно, чтобы значение поправочного коэффициента автоматически определялось системой управления насосом во время работы насоса.
Одна возможность автоматического определения поправочного коэффициента состоит в том, чтобы при приемке насоса в эксплуатацию сначала загрузить поправочный коэффициент в его задаваемом исходном значении. В качестве подходящего исходного значения может быть, например, нулевое значение. Требуемое значение поправочного коэффициента для компенсации геодезической высоты может быть затем определено в процессе работы по возникающей ошибке регулирования, так как системе управления насосом известны как заданное значение напора, так и фактическое значение напора. Затем значение поправочного коэффициента может подстраиваться до тех пор, пока не будет достигнуто заданное значение напора.
Математически определение поправочного коэффициента k можно описать с помощью следующего равенства.
Выражение err здесь характеризует значение ошибки, которое возникает между заданным значением напора и устанавливающимся фактическим значением напора. За счет определения разности между заданным и возникающим фактическим значением напора системе управления насосом, таким образом, известно текущее значение ошибки, и система управления насосом может на основе приведенного выше равенства вычислить поправочный коэффициент k.
Особенно предпочтительно, если определение поправочного коэффициента происходит регулярно, особенно предпочтительно повторяется с периодическими промежутками. Это, в частности, целесообразно, если геодезическая высота во время работы насоса может меняться. Определение поправочного коэффициента непосредственно после первого запуска тоже целесообразно. Альтернативно предлагается определение поправочного коэффициента в неопределенные случайные моменты времени.
Помимо предлагаемого изобретением способа данное изобретение касается также центробежного насоса с системой управления насосом для осуществления предлагаемого изобретением способа. Соответственно с этим для центробежного насоса получаются те же преимущества и свойства, что и уже подробно описанные выше для предлагаемого изобретением способа. По этой причине заявитель здесь опускает повтор описания.
Другие детали и преимущества изобретения будут более подробно разъяснены в дальнейшем со ссылкой на несколько чертежей. На чертежах представлено следующее:
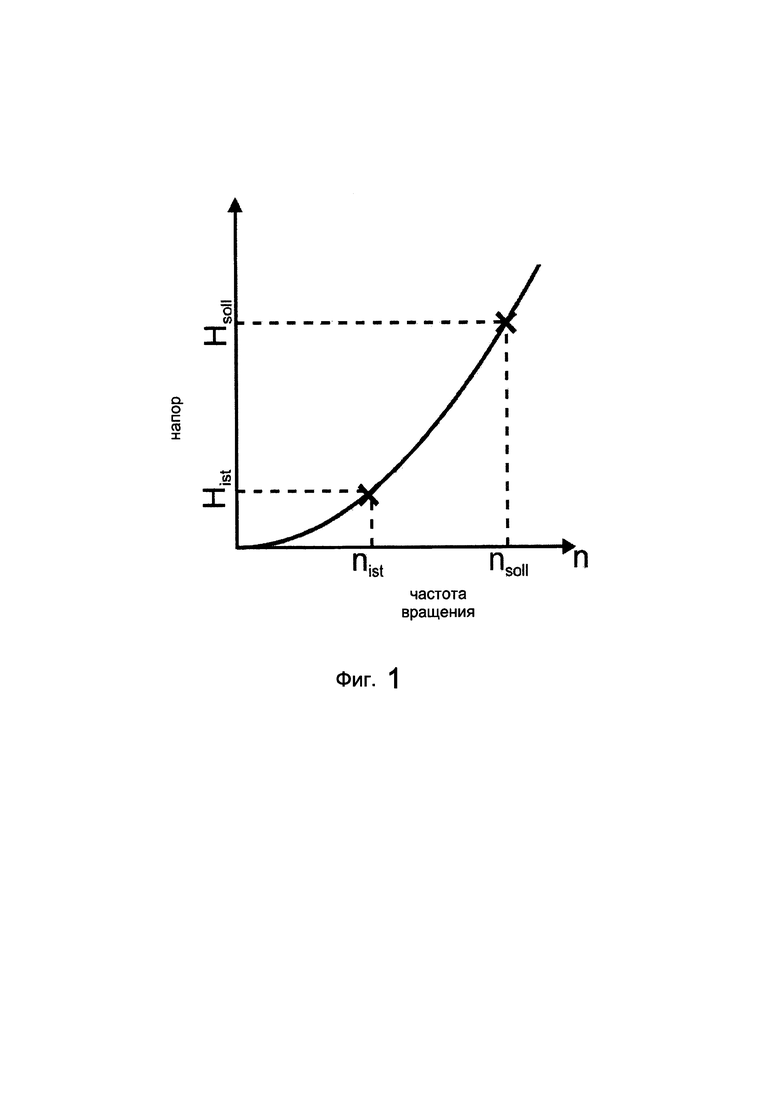
Фиг. 1: график зависимости частоты вращения от напора в замкнутом гидравлическом контуре;
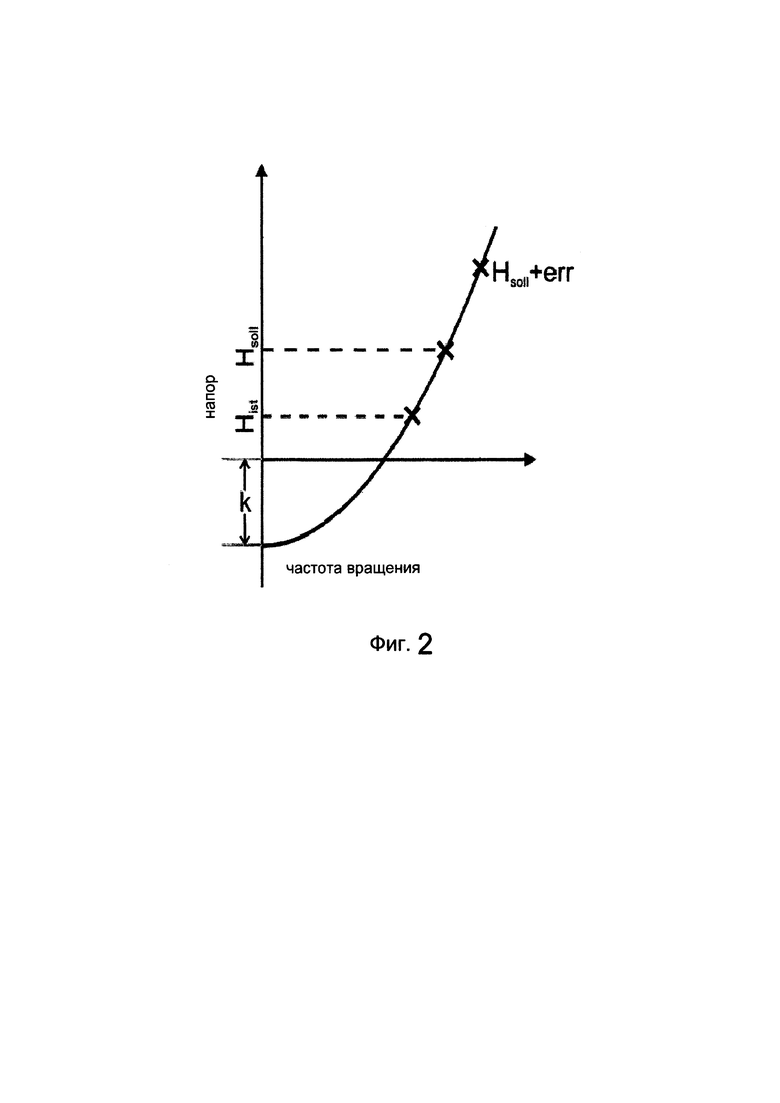
Фиг. 2: график зависимости частоты вращения от напора в открытом гидравлическом контуре;
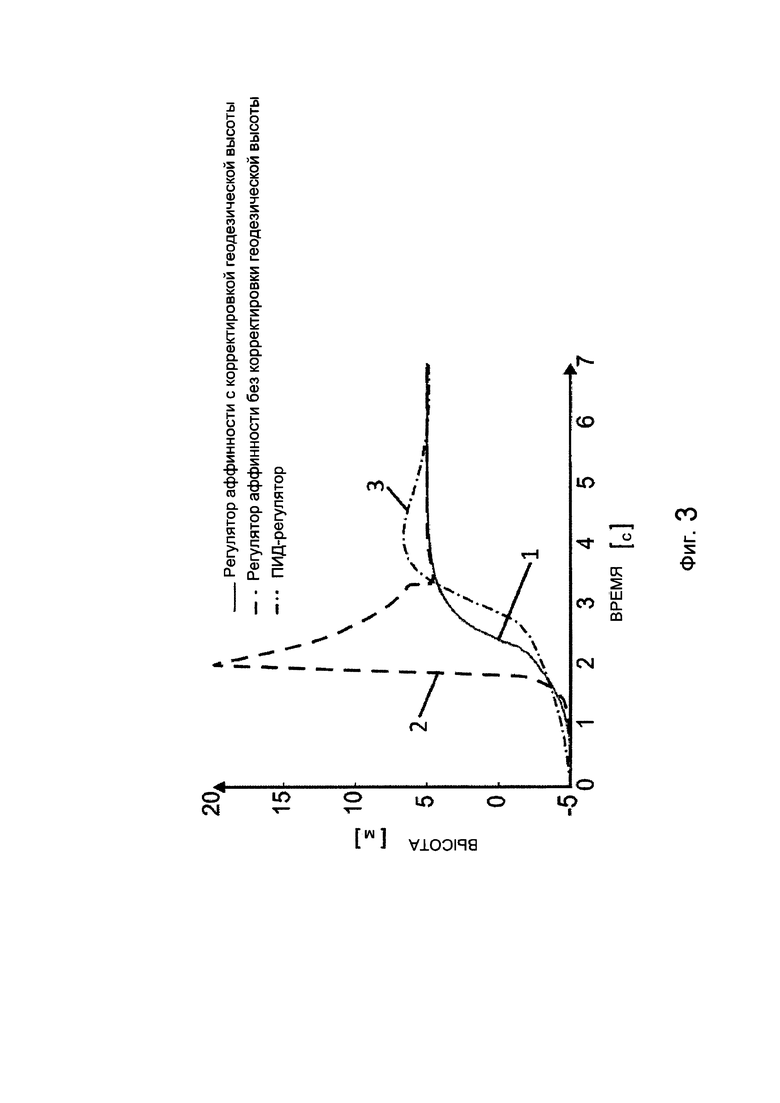
Фиг. 3: диаграмма изменения напора во времени для разъяснения качества предлагаемой изобретением регулировки по сравнению с обычными методами регулировки.
Основная идея данного изобретения состоит в использовании регулятора нового типа для регулирования частоты вращения центробежного насоса. В отличие от уровня техники предлагается, не использовать непосредственно пропорциональный интегрирующий регулятор или, соответственно, пропорциональный интегрирующий-дифференцирующий регулятор с предварением, а вместо этого использовать так называемый регулятор аффинности, который для определения регулировочного/заданного значений обращается к законам аффинности и, таким образом, исходит из квадратичной зависимости между частотой вращения и результирующим напором центробежного насоса.
Для описания работы этого регулятора аффинности следует обратиться к Фиг. 1. На диаграмме показано изменение напора по отношению к установленной частоте вращения насоса. Здесь на диаграмме подробно показана квадратичная зависимость между напором Н и частотой n вращения, что может быть описано равенством

Кроме того, на Фиг. 1 в качестве примера приведена фактическая частота nist вращения, а также заданная частота nsoll вращения. На основании указанной квадратичной зависимости между заданным и фактическим значениями устанавливается соотношение согласно следующему равенству:

Во время работы заданный и фактический напоры всегда известны. Текущая фактическая частота вращения тоже известна. Заданное значение частоты вращения (величина регулирующего воздействия) регулятор аффинности вычисляет согласно равенству 3:

Таким образом, регулятор непрерывно устанавливает правильное заданное значение напора. Путем инверсирования квадратичной зависимости между напором и частотой вращения нелинейные параметры насоса компенсируются, и насос может стабилизироваться как линейная система. Регулятор является надежным при различных рабочих ситуациях, и трудоемкая настройка параметров регулятора отпадает.
Ограничением регулятора аффинности является то, что он в прежних вариантах осуществления может применяться только в замкнутых гидравлических контурах. В открытом контуре, в котором нужно преодолевать геодезическую высоту, кривая Н/n по Фиг. 1 смещается, и математическая взаимосвязь изменяется.
Идея данного изобретения состоит в том, чтобы модифицировать регулятор аффинности таким образом, чтобы он приводил к приемлемым результатам внутри открытого гидравлического контура. Согласно изобретению, это достигается за счет модификации регулятора аффинности на один параметр для описания геодезической высоты.
Кривая на Фиг. 2 показывает взаимосвязь между напором и частотой вращения при допущении, что преобладает геодезическая высота со стороны всасывания. Вследствие этой геодезической высоты кривая параболической формы больше не проходит через начало координат, а смещена вниз на значение k.

Если бы геодезическая высота преобладала на напорной стороне, то эта кривая была бы сдвинута вверх. Если бы регулятор аффинности использовался в своей прежней форме, то достигалось бы не заданное значение напора, а напор, который смещен на значение ошибки (err).
Эта ошибка (err) может быть скорректирована за счет того, что зависимость из равенств 1 и 2 дополняется на коэффициент k.

Таким образом эта парабола сдвигается обратно в начало координат, и вычисление заданного значения частоты вращения происходит согласно равенству 6.

Проблема состоит в том, что при определенных условиях геодезический напор и вследствие этого необходимый для регулятора коэффициент к не известны. Поэтому в рамках данной идеи предлагается определять коэффициент k во время работы. Для этого при включении регулятора сначала k принимается равным нулю. Как показано на Фиг. 2, фактический напор, следовательно, отличается на значение ошибки (err). За счет определения разности между заданным и возникающим фактическим значениями напора посредством системы управления насосом это значение ошибки (err) известно. Путем приравнивания равенств 2 и 5 можно определить поправочный коэффициент k исходя из значения ошибки.

Определение k производится при работе насоса регулярно, так как геодезический напор во время работы может меняться.
На Фиг. 3 показан результат испытания с тремя различными типами регуляторов. Тестируемым объектом регулирования является насос, который должен преодолевать геодезическую высоту. В качестве регуляторов используются пропорциональный интегрирующий регулятор, обычный регулятор аффинности, а также регулятор аффинности с предлагаемой изобретением модификацией на поправочный коэффициент. Желаемое заданное значение напора для всех испытуемых типов регуляторов составляет 5 м.
На Фиг. 3 представлена временная диаграмма изменения фактического значения напора, установленного посредством отдельных типов регуляторов. Характер кривой 2 обычного регулятора аффинности без корректировки геодезической высоты сначала показывает очень сильное зашкаливание, однако, вследствие итеративной корректировки отклонения регулируемой величины заданное значение напора все-таки достигается. Пропорциональный интегрирующий регулятор с характеристикой 3 тоже достигает своего заданного значения, однако, этот результат требует больших затрат при правильной настройке параметров регулятора. Кривая 1 регулятора аффинности с учетом геодезической высоты показывает наилучший результат. Здесь нет никакого зашкаливания, никакой установившейся ошибки регулирования, и заданное значение напора достигается плавно. К тому же, настройки параметров регулятора не требуется. Благодаря этому высокая стабильность регулятора гарантируется даже при изменяющихся эксплуатационных свойствах.
Данное изобретение касается способа регулирования частоты вращения центробежного насоса, при котором регулятор системы управления насосом вычисляет заданную частоту вращения привода насоса с учетом заданного и фактического значений напора, а также фактической частоты вращения, причем этот регулятор для определения величины регулирующего воздействия основывается по меньшей мере на компонентах закона аффинности, в частности, для вычисления величины регулирующего воздействия принимает квадратичную зависимость между частотой вращения и напором. 2 н. и 8 з.п. ф-лы, 3 ил.
1. Способ регулирования частоты вращения центробежного насоса, при котором регулятор системы управления насосом определяет заданную частоту вращения привода насоса с учетом заданного и фактического значений напора, а также фактической частоты вращения,
отличающийся тем, что
регулятор выполнен как регулятор аффинности и использует закон аффинности для определения величины регулирующего воздействия, в частности для вычисления величины регулирующего воздействия принимает квадратичную зависимость между частотой вращения и напором.
2. Способ по п. 1, отличающийся тем, что регулятор определяет заданную частоту вращения из отношения квадратичной зависимости между заданной частотой вращения и заданным напором к квадратичной зависимости между фактической частотой вращения и фактическим напором.
3. Способ по п. 2, отличающийся тем, что регулятор для вычисления заданной частоты вращения учитывает поправочный коэффициент для описания геодезической высоты.
4. Способ по п. 3, отличающийся тем, что определяемая квадратичной зависимостью парабола посредством поправочного коэффициента смещается в начало координат.
5. Способ по п. 3 или 4, отличающийся тем, что значение поправочного коэффициента определяется во время работы насоса.
6. Способ по п. 5, отличающийся тем, что поправочному коэффициенту при пуске в эксплуатацию насоса придается известное исходное значение, в частности это значение принимается равным нулю.
7. Способ по п. 5, отличающийся тем, что поправочный коэффициент во время работы насоса выводится из ошибки регулирования, в частности из разности между заданным и фактическим значениями напора.
8. Способ по п. 7, отличающийся тем, что поправочный коэффициент вычисляется с помощью равенства 
9. Способ по любому из предыдущих пп. 5-7, отличающийся тем, что определение поправочного коэффициента производится во время работы насоса при первом запуске, и/или регулярно через периодические промежутки времени, и/или случайно.
10. Центробежный насос с системой управления насосом для осуществления способа согласно любому из предыдущих пунктов.
| EP 2944821 A1, 18.11.2015 | |||
| DE 102015000373 A1, 21.07.2016 | |||
| WO 2013032425 A1, 07.03.2013 | |||
| СПОСОБ УПРАВЛЕНИЯ ЭНЕРГОПОТРЕБЛЕНИЕМ НАСОСНОЙ СТАНЦИИ | 2006 |
|
RU2310792C1 |

