Изобретение относится к области энергетики, в частности, к области управления активной электрической мощностью генераторов, приводимымых реактивными гидравлическими турбинами с двумя регулирующими органами, координированное управление которыми позволяет достигнуть высокого к.п.д. преобразования энергии в широком диапазоне нагрузок.
Поворотно-лопастные, капсульные и диагональные турбины имеют два регулирующих органа: направляющий аппарат (далее «НА»), и лопасти рабочего колеса (далее «лопасти РК»), Каждому из положений лопаток НА соответствует зависящий от действующего напора угол разворота лопастей РК, при котором циркуляция потока на выходе из турбины будет обеспечивать достижение максимального значения ее к.п.д. Гидравлический режим турбины в этом случае называют комбинаторным [Г.И. Кривченко. Гидравлические машины. Турбины и насосы. М. «Энергия», 1978 г., стр. 29-30, 119-123.], а про взаимное положение регулирующих органов говорят, что они связаны комбинаторной зависимостью. Величины открытия НА и угол разворота лопастей РК однозначно определяется положениями сервомоторов их гидравлических приводов, поэтому положение регулирующих органов и задание этого положения сервомоторам их приводов системами ведения режима отождествляются.
Далее под комбинаторной зависимостью подразумевается обеспечивающая достижение максимального к.п.д. зависимость положения, сервомотора привода лопастей РК от положения сервомотора привода лопаток НА и некоторого режимного параметра, однозначно связанного с напором нетто при данном положении регулирующих органов. Если обозначить положение сервомотора привода лопаток НА - Y1, положение сервомотора привода лопастей рабочего колеса - Y2 и напор нетто - Н, то запись комбинаторной зависимости будет иметь вид:

где:
Y1 отсчитывается от положения, соответствующего полностью закрытому направляющему аппарату, в долях от полного хода сервомотора НА;
Y2 отсчитывается от положения, соответствующего развороту лопастей на минимальный угол, в долях от перемещения сервомотора при изменении угла разворота лопастей на максимальный угол;
i=1, …, k - число выбранных постоянных значений напора нетто Н.
Известным недостатком использования комбинаторных зависимостей (1), параметризованных напором нетто, заключается в сложности определения напора нетто. При низких напорах погрешности в определении положения сервомотора РК при одном и том же положении сервомотора НА могут достигать величины 5-6%, что приводит не только к снижению к.п.д., но и вызывает увеличенную вибрацию и преждевременный износ агрегата, [см. РД 153-43.2-21.564-00. Методические указания по учету стока воды на гидроэлектрических станциях. 2.3.7. Суммарная погрешность измерения напора на гидроэлектростанции. РАО ЕЭС России. Вводится в действие с 02.04.2001]
Альтернативой комбинаторному механизму, в котором зависимость положения сервомотора РК от положения НА параметризуется величиной напора нетто, является способ, использующий параметризацию величиной мощности турбины, развиваемой ею в комбинаторном режиме (см. АС СССР №291583: В.И. Григорьев. Авторское свидетельство СССР №291583 в классе F03B 15/06. Способ управления лопастями рабочего колеса гидротурбины. Бюлл. №41, 05.11.77.). Использование зависимости положения 72 сервомотора разворота лопастей от положения Y1 сервомотора НА и мощности PT турбины дает, посравнению с зависимостями, в которых в качестве параметра используется напор нетто Н, следующие преимущества:
- простота и точность определения механической мощности турбины по величинам активной PG и реактивной QG мощностей генератора;
- соответствие параметра натурного объекта и модели, на основе экспериментальных характеристик которой получены используемые комбинаторные зависимости;
- интегральный характер величины «мощность» и «локальный характер» измеренной величины напора нетто.
Далее наряду с выражением комбинаторный механизм будет употребляться термин «формирователь комбинаторной зависимости» или ФКЗ, имея в виду его функцию: определение требуемого для реализации комбинаторного режима положения Y2 сервомотора привода лопастей РК по входным сигналам пропорциональным положению Y1 сервомотора привода НА и величине мощности PT турбины. Параметры режима, например, мощность турбины, расход через нее и т.п., в комбинаторном режиме будут называться «комбинаторная мощность» или «комбинаторный расход».
При использовании комбинаторных зависимостей, параметризованных напором нетто, задание двух параметров «положение сервомотора НА» и «напор нетто» однозначно определяет «положение сервомотора РК». Задание двух параметров «положение сервомотора НА» и «комбинаторная мощность» в случае использования комбинаторных зависимостей, параметризованных величиной комбинаторной мощности, обеспечивает достижение комбинаторного режима только в том случае, если мощность турбины равна заданному значению комбинаторной мощности.
В силу сказанного алгоритм работы ФКЗ с параметризацией зависимостей комбинаторной мощностью выглядит следующим образом:
1. Получить данные о величине требуемой мощности турбины и подать сигнал пропорциональной ее значению на вход «комбинаторная мощность» формирователя комбинаторной зависимости, при этом на вход «положение сервомотора НА» непрерывно подается сигнал задания Y1 положения сервомотора НА.
2. Если измеряемая текущая мощность турбины меньше требуемой, то сформировать команду сервомотору привода НА «открытие больше», если измеряемая текущая мощность турбины больше требуемой, то сформировать команду сервомотору привода НА «открытие меньше».
3. При равенстве требуемой и текущей мощностей движение сервомотора НА остановить.
Применение ФКЗ с параметризацией комбинаторных зависимостей величиной комбинаторной мощности турбины необходимо требует использования обратной связи по мощности для возможности достижения главной цели: обеспечить работу турбины в комбинаторном режиме.
При работе в составе мощной приемной системы электрическая активная мощность генератора PG равна произведению мощности турбины PT на зависящий от активной PG и реактивной QG мощностей генератора к.п.д. «ηG» и механический к.п.д ηmeh», учитывающий потерю на трение в подшипнике турбины:

Вся активная мощность генератора PG передается в сеть.
Системы управления гидрогенераторов имеют в своем составе пропорционально-интегрирующий регулятор мощности с главной обратной связью по активной мощности генератора. Формируемое регулятором задание положения сервомотора направляющего аппарата преобразуется: в соответствии с действующим напором формирователем комбинаторных зависимостей в требуемое для эффективной работы турбины задание положения сервомотора рабочего колеса. Таким образом, регулятор мощности одним сигналом задания положения направляющего аппарата управляет одновременно двумя регулирующими органами. Примером реализации управления мощностью гидравлической турбины может служить структурная схема [см. VOITH "HyCon™. Digital turbine governor", Heidenheim. https://voith.com/de/12_06_Digital_Turbine_Governor.pdf].
Рассмотренное ранее техническое решение [А.С. SU 291583 А] для реализации комбинаторного режима имеет обратную связь по активной мощности генератора, сигнал датчика которой подается на предназначенный для сигнала пропорционального комбинаторной мощности вход ФКЗ. Это техническое решение полностью исключает применение регуляторов частоты и мощности гидротурбин, из-за непредсказуемого поведения привода сервомотора РК, вызываемого включением положительной обратной связью по мощности параллельно главной обратной связи по его положению.
Известно также техническое решение [см. «Способ и устройство повышения точности управления углом установки лопастей поворотно-лопастной турбины», патент РФ RU 2608793 С2], заключающееся в ведении в систему управления лопастями РК посредством ФКЗ, параметризованных напором нетто, индикатора отклонения режима работы турбины от комбинаторного: разности между мощностью турбины и мощностью, которую она должна вырабатывать, если ее режим при текущем взаимном положении регулирующих органов - комбинаторный. Аддитивная коррекция величины напора нетто пропорционально интегралу от величины сигнала, вырабатываемого индикатором компенсировать ошибки в определении величины напора нетто инструментальными средствами.
По своей технической сущности предлагаемый способ управления лопастями ближе всего ПИ-регулятору мощности турбины с ФКЗ, параметризованными напором нетто, так как он не требует специального дополнительного контура с обратной связью по мощности для реализации функции ФКЗ, параметризованных сигналом комбинаторной мощности.
Задачей изобретения является разработка способа управления лопастями рабочего колеса поворотно-лопастной турбины, на основе определения угла разворота его лопастей по комбинаторным зависимостям, параметризованными величиной комбинаторной мощности турбины, для прогнозирования величины которой используется сигнал задания активной мощности генератора, являющийся входным для управляющего сервомотором направляющего аппарата пропорционально-интегрирующего регулятора мощности турбины. Это позволит обеспечить высокую точность определения угла разворота лопастей, достигаемую использованием формирователя комбинаторных зависимостей, параметризованных величиной комбинаторной мощности турбины, и в то же время сохранить характерные для управления лопастями рабочего колеса формирователем комбинаторных зависимостей, параметризованных напором нетто, структурную простоту системы управления приводами сервомоторов регулирующих органов при выполнении заданий регулятора мощности.
Поставленная задача решается в способе управления лопастями рабочего колеса гидротурбины, включающем использование сигналов задания активной мощности генератора, датчиков его активной и реактивной мощностей, выходного сигнала пропорционально-интегрирующего регулятора мощности турбины, входным сигналом которого является разность сигналов задания и выходного сигнала датчика активной мощности, а выходным - задание положения сервомотора привода лопаток направляющего аппарата, основанный на использовании обеспечивающей достижение максимального к.п.д. экспериментальной зависимости положения сервомотора привода разворота лопастей рабочего колеса от задания положения сервомотора направляющего аппарата и мощности турбины в комбинаторном режиме, заключающемся в определении сигнала ожидаемой комбинаторной мощности турбины по величинам сигнала задания активной, измеренной реактивной мощностей генератора и его к.п.д. как функции от них и использовании сигнала ожидаемой комбинаторной мощности в качестве входного в упомянутой экспериментальной зависимости для определения задания положения сервомотора приводу лопастей рабочего колеса.
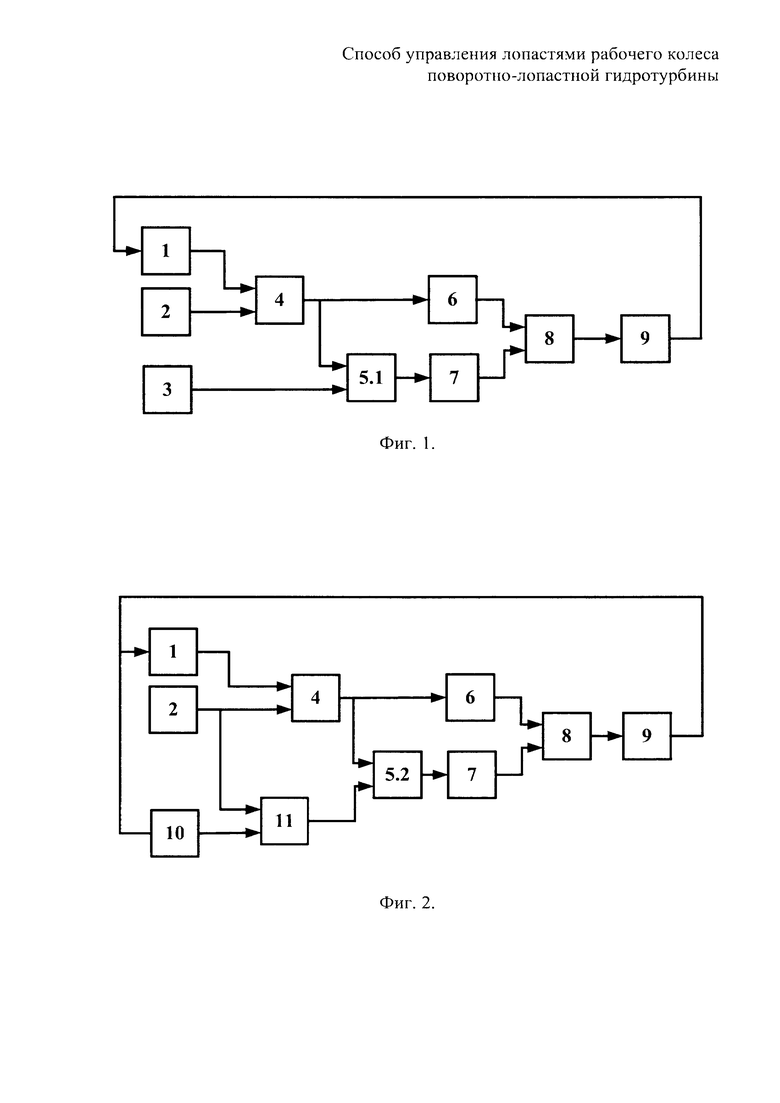
На фиг. 1 представлено стандартное включение формирователя 5.1 комбинаторных зависимостей, параметризованных напором нетто, в систему управления мощностью поворотно-лопастного агрегата, где сигналы задатчика 2 активной мощности генератора и датчика 1 его активной мощности поступают на вход ПИ-регулятора 4, который формирует выходной сигнал задания положения сервомотора привода 6 лопаток НА, поступающий также на вход формирователя комбинаторной зависимости 5.1, на другой вход которого подается сигнал напора нетто от передатчика 3 станционной системы изменения гидротехнических величин, а выходной сигнал его является заданием положения сервомотора привода 7 лопастей РК, изменения положений сервомоторов приводов 6 и 7 обеспечивают изменения мощности турбины 8 и генератора 9;
На фиг. 2 представлена схема включения формирователя 5.2 комбинаторных зависимостей, параметризованных величиной комбинаторной мощности турбины в систему управления ее мощностью. Сигналы задатчика 2 активной мощности генератора и датчика 1 активной мощности генератора поступают на вход пропорционально-интегрирующего регулятора 4, выходной сигнал которого является заданием положения сервомотора привода 6 лопаток направляющего аппарата турбины 8, а также входом для формирователя 5.2 комбинаторных зависимостей, на другой вход которого поступает сигнал вычислителя 11 ожидаемой комбинаторной мощности турбины, определенный по выходным сигналам задатчика 2 активной мощности и датчика 10 реактивной мощности генератора 9, определенных по зависимости КПД генератора от активной и реактивной мощностей его, выходной сигнал формирователя 5.2 является заданием положения сервомотора привода 7 лопастей РК.
Представленная на фиг. 2 схема иллюстрирует методы обработки сигналов датчиков и функциональных элементов, являющихся предметом патентования предлагаемого способа управления лопастями рабочего колеса поворотно-лопастной турбины.
Возможность реализации предлагаемого способа подтверждает рассмотрение характеристик некоторых элементов, входящих в состав устройства, реализующего предлагаемый способ управления лопастями рабочего колеса поворотно-лопастной турбины. Формирователь 11 сигнала пропорционального механической мощности турбины по величинам задания активной мощности и текущему значению реактивной мощностей генератора является преобразователем, выполняющим вычисление ожидаемой механической мощности турбины по формуле (6) и по техническим параметрам генератора. Например, для генератора СВ-1343/140-96УХЛ4 (Новосибирская ГЭС) параметры заданы таблицей №1.
Механический коэффициент полезного действия турбины по данным ЛМЗ изменяется в диапазоне ηmeh=0,995÷0,998.
Из таблицы №1 следует, что реактивная мощность генератора при изменении ее от нуля (cosϕ=1) до номинального значения при заданном уровне нагрузки (активной мощности) слабо влияет на величину к.п.д. генератора. Это означает, что выходной сигнал формирователя 11 слабо зависит от характера изменения реактивной мощности генератора, а, значит, выбранное но величине задания активной мощности PZAD значение комбинаторной мощности PK, определяющей по какой из линий, параметризованной ее значением, будет изменяться задание положения Y2 сервомотора РК при изменении задания Y1 положения сервомотора НА будет сохраняться практически неизменным до конца процесса управления, пока активная мощность генератора не станет равной заданной (PZAD=PG) и не установиться значение реактивной мощности. Роль сигнала формирователя 11 в известной степени аналогична постоянному значению (точнее слабо изменяющемуся, из-за изменения потерь давления в водоводах ГЭС) сигнала напора нетто (фиг. 2) при использовании комбинаторных зависимостей, параметризованных напором нетто. В обоих случаях задание положения лопастей РК определяется ординатами практически неизменной в процессе управления кривой. Абциссой для нахождения значения этой ординаты на ней служит сигнал задания положения сервомотора НА.
Пропорционально-интегрирующий регулятор 4, входными для которого являются сигнал PZAD задатчика 2 и сигнал датчика активной мощности PG будет изменять сигнал задания положения 71 сервомотора НА, до тех пор, пока разность (PZAD-PG) не станет равной нулю.
Таким образом, в конечной точке равновесия будут выполняться два основных равенства: (PZAD-PG)=0 и PT=PK, что говорит о достижении цели заявляемого способа управления лопастями гидравлической турбины.
Предлагаемый способ управления лопастями рабочего колеса поворотно-лопастной гидротурбины, в силу связного движения обоих регулирующих органов и необходимости вывести агрегат в режим генерации определенного уровня мощности, не может применяться в двух случаях: при стабилизации частоты вращения в изолированном районе, когда мощность определяется потребителем, и зависит от частоты вращения, и случае управления прямым заданием величины открытия направляющего аппарата, когда ведется регулирование водотока.
Изобретение относится к области энергетики, а именно к способу управления сервомотором лопастей рабочего колеса поворотно-лопастной турбины, использующему при определении положения сервомотора привода 7 лопастей рабочего колеса в соответствии с комбинаторной зависимостью в качестве входных сигналов выходной сигнал пропорционально-интегрирующего регулятора 4 мощности турбины, задающий положение сервомотора приводу 6 лопаток направляющего аппарата 8, и мощность, развиваемую турбиной в комбинаторном режиме. Способ заключается в том, что в качестве сигнала комбинаторной мощности используют сигнал ожидаемой комбинаторной мощности турбины, определяемый по величинам сигналов задания активной и измеренной реактивной мощностей генератора, а также известными зависимостями его к.п.д. от них. Изобретение направлено на обеспечение точности угла разворота лопастей. 2 ил., 1 табл.
Способ управления лопастями рабочего колеса гидротурбины, включающий использование сигналов задания активной мощности генератора, датчиков его активной и реактивной мощностей, выходного сигнала пропорционально-интегрирующего регулятора мощности турбины, входным сигналом которого является разность сигналов задания и выходного сигнала датчика активной мощности, а выходным - задание положения сервомотора привода лопаток направляющего аппарата, основанный на использовании обеспечивающей достижение максимального к.п.д. экспериментальной зависимости положения сервомотора привода разворота лопастей рабочего колеса от задания положения сервомотора направляющего аппарата и мощности турбины в комбинаторном режиме, заключающийся в определении сигнала ожидаемой комбинаторной мощности турбины по величинам сигнала задания активной, измеренной реактивной мощностей генератора и его к.п.д. как функции от них и использовании сигнала ожидаемой комбинаторной мощности в качестве входного в упомянутой экспериментальной зависимости для определения задания положения сервомотора приводу лопастей рабочего колеса.
| Способ и устройство повышения точности управления углом установки лопастей поворотно-лопастной турбины | 2015 |
|
RU2608793C2 |
| Способ управления лопастями рабочего колеса гидротурбин | 1969 |
|
SU291583A1 |
| Способ регулирования поворотнолопастной гидротурбины | 1977 |
|
SU659780A1 |
| US 8125096 B2, 28.12.2012 | |||
| DE 4124498 A1, 26.11.1992. | |||

