Область техники, к которой относится изобретение
Настоящее изобретение относится в общем к области управления газотурбинным двигателем летательного аппарата, а более конкретно - к области управления по замкнутому контуру скорости вращения газотурбинного двигателя посредством контроля клапана дозировки топлива. Изобретение касается системы и способа управления газотурбинным двигателем летательного аппарата, а также газотурбинного двигателя, оснащенного системой управления.
Уровень техники
Скорость вращения газотурбинного двигателя летательного аппарата, как правило, контролируется клапаном дозирования топлива, содержащим дозирующую заслонку, положение которой определяет объемный расход топлива, впрыскиваемого в камеру сгорания, и исполнительный механизм, выполненный с возможностью перемещения дозирующей заслонки в зависимости от электрического тока управления. Для большинства газотурбинных двигателей управление по замкнутому контуру скоростью вращения с учетом заданного значения скорости осуществляется для того, чтобы получить лучшие характеристики газотурбинного двигателя, в частности, с точки зрения реакции на заданное значение скорости. В частности, это управление по замкнутому контуру может быть основано на двойном контуре управления, а именно на общем контуре, регулирующем скорость вращения газотурбинного двигателя путем вычисления заданного значения положения дозирующей заслонки, и на локальном контуре, управляющем исполнительным механизмом в зависимости от положения дозирующей заслонки, измеренного датчиком положения. Недостатком этого двойного контура управления является то, что в случае отказа датчика положения становится полностью невозможным управление скоростью вращения. Выход из строя датчика положения приводит к остановке газотурбинного двигателя. На многодвигательном летательном аппарате это подразумевает перераспределение тяги и выработки электроэнергии на остальных газотурбинных двигателях. На однодвигательном летательном аппарате выход из строя датчика положения означает не только полную потерю тяги, но и потерю выработки электроэнергии. Датчик положения, который является критическим элементом для полета летательного аппарата, как правило, дублируется. Затем каждый датчик положения предоставляет результаты измерения положения в корректор локального контура, который выполняет управление по замкнутому контуру на основе среднего значения двух измерений положения. Тем не менее, при наличии двух датчиков положения возникает проблема в случае расхождения измерений положения. Корректор не может определить, какое из измерений положения является правильным и следует использовать для управления по замкнутому контуру. Таким образом, даже в случае отказа одного измерительного датчика может быть заблокировано управление по замкнутому контуру скоростью вращения газотурбинного двигателя. Кроме того, управление по замкнутому контуру блокируется в случае выхода из строя двух датчиков положения.
Ввиду вышеизложенного, задача изобретения состоит в том, чтобы выполнить систему для управления газотурбинным двигателем летательного аппарата, обеспечивающую управление по замкнутому контуру его скоростью вращения с учетом заданного значения даже в случае отказа датчика положения, измеряющего положение дозирующей заслонки. Другая задача изобретения состоит в том, чтобы выполнить систему управления, гарантирующую работу газотурбинного двигателя в штатных рабочих диапазонах даже при отсутствии информации о положении дозирующей заслонки.
Раскрытие сущности изобретения
Для решения этих задач изобретение основывается на управлении по замкнутому контуру скоростью вращения без проведения измерения положения дозирующей заслонки. Исполнительный механизм приводится в действие напрямую в зависимости от отклонения между заданным значением скорости вращения и измеренной скоростью вращения.
Более конкретно, изобретение относится к системе управления для газотурбинного двигателя летательного аппарата, причем газотурбинный двигатель содержит:
▪ камеру сгорания,
▪ клапан дозирования топлива, включающий в себя дозирующую заслонку, положение которой определяет объемный расход топлива, впрыскиваемого в камеру сгорания, и исполнительный механизм, выполненный с возможностью перемещения дозирующей заслонки в зависимости от электрического тока управления,
▪ датчик положения, выполненный с возможностью измерения положения дозирующей заслонки и подачи результата измерения положения,
▪ датчик скорости, выполненный с возможностью измерения скорости вращения газотурбинного двигателя и подачи результата измерения скорости вращения, и
▪ блок контроля, выполненный с возможностью подачи заданного значения скорости вращения, обнаружения отказа датчика положения и подачи сигнала отказа в случае обнаружения отказа датчика положения.
Согласно изобретению система управления содержит:
▪ систему обработки в штатном режиме, включающую в себя:
глобальный корректор, выполненный с возможностью приема заданного значения скорости вращения и результата измерения скорости вращения и определения заданного значения массового расхода топлива в зависимости от заданного значения скорости вращения и результата измерения скорости вращения,
модуль преобразования, выполненный с возможностью преобразования заданного значения массового расхода топлива в заданном положении, и
локальный корректор, выполненный с возможностью приема заданного значения положения и результата измерения положения и определения электрического тока управления в штатном режиме в зависимости от заданного значения положения и результата измерения положения,
▪ систему обработки в режиме работы с ухудшенными характеристиками, включающую в себя прямой корректор, выполненный с возможностью приема заданного значения скорости вращения и результата измерения скорости вращения и определения электрического тока управления в режиме работы с ухудшенными характеристиками в зависимости от заданного значения скорости вращения и результата измерения скорости вращения, и
▪ модуль управления режимами, выполненный с возможностью приема сигнала отказа, электрического тока управления в штатном режиме и электрического тока управления в режиме работы с ухудшенными характеристиками, и подачи, в исполнительный механизм клапана дозирования топлива, электрического тока управления в штатном режиме при отсутствии приема сигнала отказа и электрического тока управления в режиме работы с ухудшенными характеристиками в случае приема сигнала отказа.
В пределах объема настоящего изобретения параметр полета летательного аппарата соответствует, например, числу Маха или высоте летательного аппарата. Рабочий параметр газотурбинного двигателя соответствует, например, температуре внутри газотурбинного двигателя, например, температуре выхлопных газов или в камере сгорания, или давлению внутри газотурбинного двигателя, например, статическому давлению на входе в камеру сгорания.
Согласно конкретному варианту осуществления прямой корректор выполнен с возможностью дополнительного приема одного или нескольких параметров полета летательного аппарата и/или одного или несколько рабочих параметров газотурбинного двигателя, при этом электрический ток дополнительно определяется в зависимости от параметров полета летательного аппарата и/или рабочих параметров газотурбинного двигателя. Предпочтительно прямой корректор может быть выполнен с возможностью приема числа Маха и высоты летательного аппарата и определения электрического тока управления в режиме работы с ухудшенными характеристиками в зависимости от этих параметров полета.
Прямой корректор представляет собой, например, пропорциональный корректор, интегральный корректор, дифференциальный корректор или любое сочетание этих корректоров. В частности, в состав прямого корректора может входить корректор пропорционально-интегрального типа. Когда прямой корректор принимает параметр полета летательного аппарата и/или рабочий параметр газотурбинного двигателя, коэффициент усиления пропорционального корректора, постоянная интегрирования пропорционального корректора и/или производная постоянная дифференциального корректора могут быть переменными, зависящими от этих параметров.
Система обработки в режиме работы с ухудшенными характеристиками может быть также выполнена таким образом, чтобы интегрировать модуль защиты, выполненный с возможностью ограничения работы газотурбинного двигателя в штатных рабочих диапазонах, которые соответствуют управлению по замкнутому контуру газотурбинного двигателя благодаря системе обработки в штатном режиме, или даже в рабочих диапазонах с функциональными ограничениями.
В частности, в первом варианте осуществления изобретения система обработки в режиме работы с ухудшенными характеристиками дополнительно включает в себя ограничитель градиента, выполненный с возможностью приема заданного значения скорости вращения и определения заданного значения ускорения-ограниченной скорости. Заданное значение ускорения-ограниченной скорости определяется таким образом, чтобы ограничить скорость изменения заданного значения скорости вращения, и используется прямым корректором вместо заданного значения скорости вращения. На практике заданное значение ускорения-ограниченной скорости определяется таким образом, чтобы следовать заданному значению скорости вращения со скоростью изменения, которая меньше или равна заданному максимальному порогу ускорения.
Ограничитель градиента может дополнительно быть выполнен с возможностью приема одного или нескольких параметров полета летательного аппарата и/или одного или нескольких рабочих параметров газотурбинного двигателя, при этом заданный максимальный порог ускорения может изменяться в зависимости от параметров полета и/или параметров работы газотурбинного двигателя.
Во втором варианте осуществления изобретения система обработки в режиме работы с ухудшенными характеристиками дополнительно включает в себя схему ограничения, выполненную с возможностью приема заданного значения скорости вращения, измерения скорости вращения и рабочего параметра газотурбинного двигателя, и определения заданного значения ограниченной скорости, причем заданное значение ограниченной скорости определяется путем вычисления разности между рабочим параметром и заданным минимальным пороговым параметром или между рабочим параметром и заданным максимальным пороговым параметром, путем умножения упомянутой разности на коэффициент, который относится к рабочему параметру, путем сложения результата измерения скорости вращения с результатом умножения и путем взятия, в качестве заданного значения ограниченной скорости, максимума между результатом сложения и заданным значением скорости вращения, когда разность вычисляется по отношению к минимальному пороговому параметру, и минимума между результатом сложения и заданным значением скорости вращения, когда разность вычисляется по отношению к максимальному пороговому параметру.
В частности, схема ограничения может быть выполнена с возможностью приема, в качестве рабочего параметра, результата измерения давления газотурбинного двигателя, например, результата измерения статического давления на входе в камеру сгорания, причем разность вычисляется между результатом измерения давления и заданным минимальным давлением. В качестве альтернативы, схема ограничения может быть выполнена с возможностью приема, в качестве рабочего параметра, результата измерения температуры газотурбинного двигателя, например, результата измерения температуры выхлопных газов, при этом разность вычисляется между результатом измерения температуры и заданной максимальной температурой.
Схема ограничения может быть выполнена с возможностью приема несколько рабочих параметров газотурбинного двигателя, при этом каждый рабочий параметр сравнивается с минимальным или максимальным пороговым параметром, как было указано ранее. В этом случае заданное значение ограниченной скорости определяется как максимум по отношению к различным минимальным и максимальным значениям, определенным для рабочих параметров газотурбинного двигателя.
Изобретение также относится к газотурбинному двигателю для летательного аппарата, содержащему:
▪ камеру сгорания,
▪ клапан дозирования топлива, включающий в себя дозирующую заслонку, положение которой определяет объемный расход топлива, впрыскиваемого в камеру сгорания, и исполнительный механизм, выполненный с возможностью перемещения дозирующей заслонки в зависимости от электрического тока управления,
▪ датчик положения, выполненный с возможностью измерения положения дозирующей заслонки и подачи результата измерения положения,
▪ датчик скорости, выполненный с возможностью измерения скорости вращения газотурбинного двигателя и подачи результата измерения скорости вращения,
▪ блок контроля, выполненный с возможностью подачи заданного значения скорости вращения, обнаружения отказа датчика положения и подачи сигнала отказа в случае обнаружения отказа датчика положения, и
▪ систему управления, которая описана ранее.
Согласно конкретному варианту осуществления датчик положения содержит первый чувствительный элемент и второй чувствительный элемент, причем первый чувствительный элемент выполнен с возможностью измерения положения дозирующей заслонки и выполнения измерения первого положения, и второй чувствительный элемент выполнен с возможностью измерения положения дозирующей заслонки и выполнения измерения второго положения, при этом блок контроля выполнен с возможностью обнаружения отказа датчика положения в случае отклонения между первым результатом измерения положения и вторым результатом измерения положения, который больше, чем заданный порог, или при отсутствии приема первого результата измерения положения и второго результата измерения положения.
Наконец, изобретение относится к способу управления для газотурбинного двигателя летательного аппарата, причем газотурбинный двигатель содержит:
▪ камеру сгорания,
▪ клапан дозирования топлива, включающий в себя дозирующую заслонку, положение которой определяет объемный расход топлива, впрыскиваемого в камеру сгорания, и исполнительный механизм, выполненный с возможностью перемещения дозирующей заслонки в зависимости от электрического тока управления,
▪ датчик положения, выполненный с возможностью измерения положения дозирующей заслонки и подачи результата измерения положения,
▪ датчик скорости, выполненный с возможностью измерения скорости вращения газотурбинного двигателя и предоставления результатов измерения скорости вращения, и
▪ блок контроля, выполненный с возможностью подачи заданного значения скорости вращения, обнаружения отказа датчика положения и подачи сигнала отказа в случае обнаружения отказа датчика положения.
Согласно изобретению способ управления содержит этапы:
▪ контроля отказа датчика положения,
▪ при отсутствии отказа датчика положения,
определения заданного значения массового расхода топлива в зависимости от заданного значения скорости вращения и результата измерения скорости вращения,
преобразования заданного значения массового расхода топлива в заданное значение положения,
определения электрического тока управления в штатном режиме в зависимости от заданного значения положения и результата измерения положения, и
подачи, в исполнительный механизм клапана дозирования топлива, электрического тока управления в штатном режиме,
▪ в случае отказа датчика положения,
определения электрического тока управления в режиме работы с ухудшенными характеристиками в зависимости от заданного значения скорости вращения и результата измерения скорости вращения, и
подачи, в исполнительный механизм клапана дозирования топлива электрического тока управления в режиме работы с ухудшенными характеристиками.
Краткое описание чертежей
Другие признаки, подробности и преимущества изобретения станут очевидными после прочтения последующего описания, приведенного только в качестве примера и со ссылкой на сопроводительные чертежи, на которых:
на фиг. 1 показан в виде блок-схемы пример газотурбинного двигателя летательного аппарата и системы управления с двойным контуром управления для газотурбинного двигателя;
на фиг. 2 показан в виде блок-схемы пример газотурбинного двигателя летательного аппарата и системы управления газотурбинного двигателя согласно изобретению, при этом упомянутая система управления содержит систему обработки в штатном режиме и систему обработки в режиме работы с ухудшенными характеристиками;
на фиг. 3 показано управление по замкнутому контуру, выполняемое с использованием системы обработки в режиме работы с ухудшенными характеристиками;
на фиг. 4 показан модуль защиты, оснащающий систему обработки в режиме работы с ухудшенными характеристиками; и
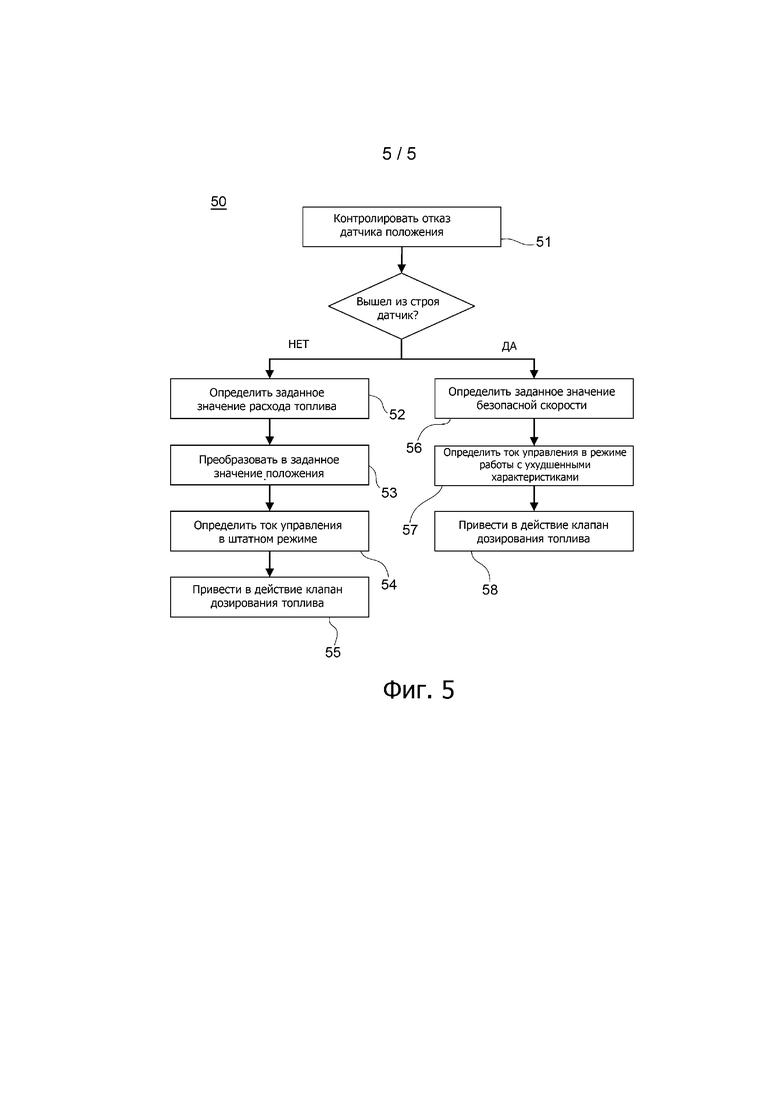
на фиг. 5 показан пример способа управления согласно изобретению.
Подробное описание изобретения
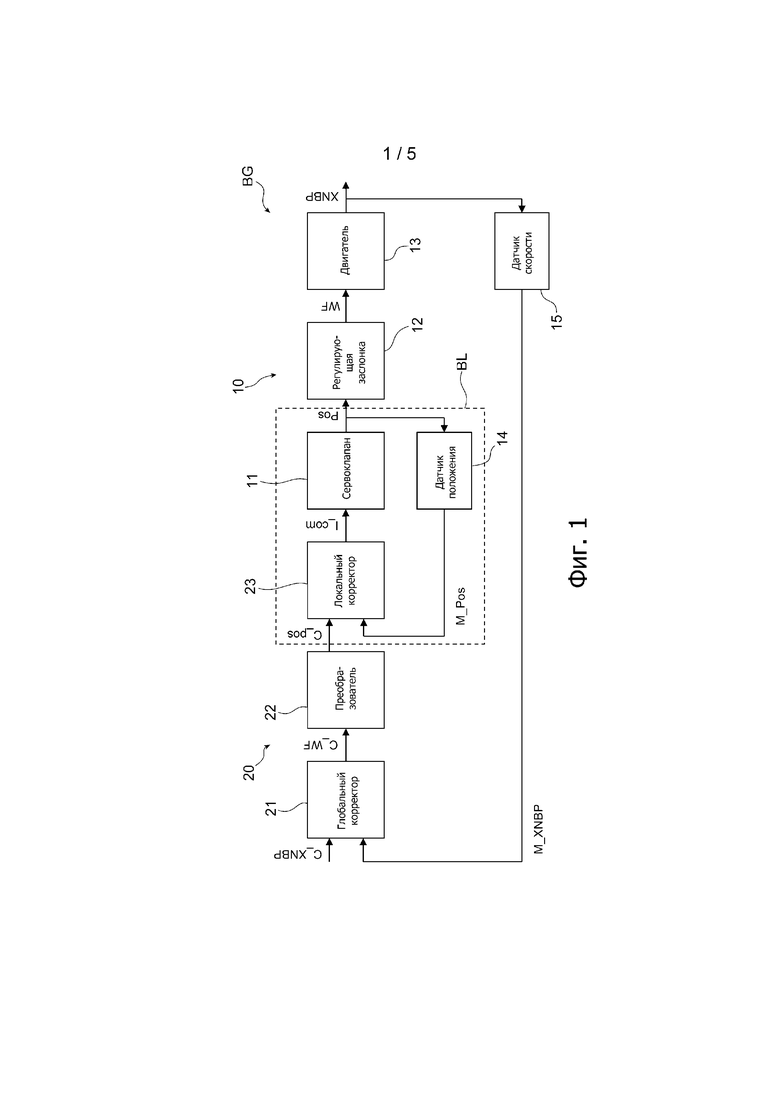
На фиг. 1 показан в виде блок-схемы пример газотурбинного двигателя летательного аппарата и системы управления для газотурбинного двигателя на основе двойного контура управления. В частности, газотурбинный двигатель 10 содержит сервоклапан 11, дозирующую заслонку 12, камеру сгорания и набор вращающихся элементов, как правило, обозначаемых термином «двигатель» 13, датчик 14 положения и датчик 15 скорости. Сервоклапан 11 и дозирующая заслонка 12 образуют клапан дозирования топлива. Дозирующая заслонка 12 выполнена с возможностью перемещения в различные положения сервоклапаном 11, причем каждое положение, обозначенное «Pos», соответствует объемному расходу топлива, обозначенному «WF», которое впрыскивается в камеру сгорания. Сгорание этого объема топлива приводит во вращение вращающиеся элементы газотурбинного двигателя, в частности, компрессор и турбину. В двухкорпусном газотурбинном двигателе вращающиеся элементы содержат корпус низкого давления и корпус высокого давления, причем каждый корпус содержит компрессор, турбину и соединительный вал между компрессором и турбиной. Скорость вращения одного из вращающихся элементов измеряется датчиком 15 скорости. В оставшейся части описания считается, что датчик 15 скорости измеряет скорость вращения корпуса XNBP низкого давления, при этом результат измерения обозначен «M_XNBP». Более того, положение Pos дозирующей заслонки 12 измеряется датчиком 14 положения, при этом результат измерения положения обозначен «M_Pos». Датчик 14 положения может включать в себя два чувствительных элемента, каждый из которых выполнен с возможностью измерения положения дозирующей заслонки 12 и подачи результата измерения положения. Датчик 14 положения представляет собой, например, датчик типа линейно регулируемого дифференциального трансформатора (LVDT).
Система 20 управления содержит глобальный корректор 21, преобразователь 22 и локальный корректор 23. Глобальный корректор 21 принимает результат измерения скорости M_XNBP вращения и заданное значение скорости, обозначенную «C_XNBP», предоставляемую блоком для контроля за летательным аппаратом. Например, это заданное значение определяется в зависимости от тяги, необходимой пилоту летательного аппарата или автопилоту. В зависимости от заданного значения C_XNBP скорости и результата измерения M_XNBP скорости вращения глобальный корректор 21 определяет заданное значение массового расхода топлива, обозначенную «C_WF». Преобразователь 22 выполнен с возможностью приема этой заданного значения C_WF и определения ассоциированной заданного значения C_Pos положения для дозирующей заслонки 12. В частности, преобразователь 22 может определить заданное значение C_Pos положения в зависимости от одного или нескольких параметров, например, температуры топлива расположенной впереди дозирующей заслонки 12. Заданное значение C_Pos положения передается в локальный корректор 23, который также принимает результат измерения M_Pos положения. Локальный корректор 23 выполнен с возможностью определения электрического тока I_com управления в зависимости от заданного значения C_Pos положения и результата измерения M_Pos положения. Когда датчик 14 положения предоставляет несколько результатов измерения положения, локальный корректор 23 учитывает, например, среднее значение результатов измерений положения. Электрический ток I_com управления подается в сервоклапан 11 таким образом, чтобы при приведении его в действие дозирующая заслонка перемещалась в желаемое положение. Глобальный корректор 21 и локальный корректор 23 представляют собой, например, пропорционально-интегрально-дифференциальные (ПИД) корректоры.
Таким образом, система 20 управления включает в себя двойной контур управления, а именно локальный контур BL, образованный локальным корректором 23, сервоклапаном 11 и датчиком 14 положения, и глобальный контур BG, образованный глобальным корректором 21, преобразователем 22, локальным корректором 23, сервоклапаном 11, датчиком 14 положения, дозирующей заслонкой 12, двигателем 13 и датчиком 15 скорости. Из этой схемы следует, что в случае отсутствия приема результата измерения M_Pos положения локальным корректором 23 или значительного отклонения между результатами измерениями положения из-за нескольких чувствительных элементов, локальный контур BL больше не работает, что также приводит к блокированию работы глобального контура BG. При отсутствии какого-либо управления по замкнутому контуру газотурбинный двигатель останавливается автоматически или вручную.
Во избежание потери управляемости газотурбинного двигателя и, следовательно, непосредственно газотурбинного двигателя, в изобретении предложена система управления, содержащая в дополнение к двойному контуру управления, который описан выше, контур для управления скоростью вращения газотурбинного двигателя, который не учитывает результат измерения M_Pos положения и который может использоваться в случае недоступности или отказа измерения M_Pos положения. Этот контур управления называется «контуром отказа в режиме работы с ухудшенными характеристиками».
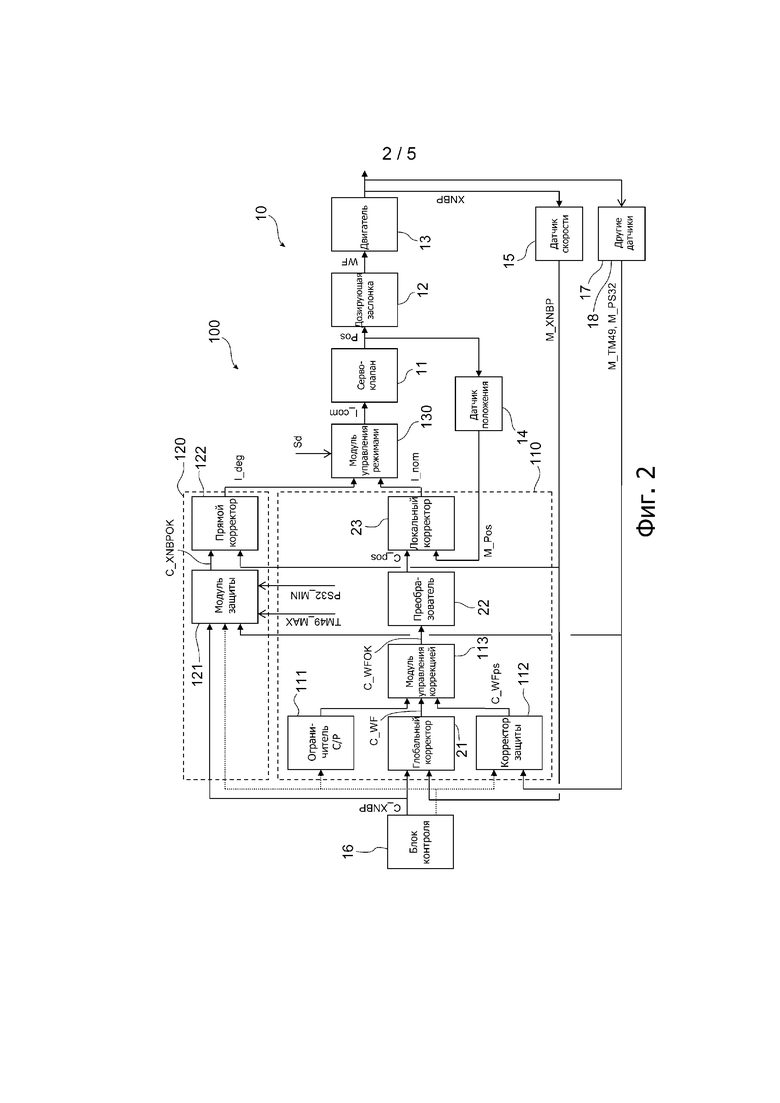
На фиг. 2 показан в виде блок-схемы пример газотурбинного двигателя летательного аппарата и системы управления согласно изобретению для газотурбинного двигателя. Газотурбинный двигатель 10 содержит, как и газотурбинный двигатель, показанный на фиг. 1, сервоклапан 11, дозирующую заслонку 12, двигатель 13, включающий в себя камеру сгорания и вращающиеся элементы, датчик 14 положения и датчик 15 скорости. Кроме того, газотурбинный двигатель 10 содержит блок 16 контроля, датчик 17 температуры, выполненный с возможностью измерения температуры внутри газотурбинного двигателя, и датчик 18 давления, выполненный с возможностью измерения давления внутри газотурбинного двигателя. Блок 16 контроля выполнен с возможностью предоставления заданного значения C_XNBP скорости и различных летных и/или рабочих параметров газотурбинного двигателя 10, как указано ниже. В этом примерном варианте осуществления датчик 17 температуры выполнен с возможностью определения измерения температуры выхлопных газов M_TM49, и датчик 18 давления выполнен с возможностью определения измерения статического давления на входе в камеру M_PS32 сгорания. Тем не менее датчик 17 температуры может измерять любую другую температуру газотурбинного двигателя, необходимую для его управления. Система 100 управления содержит систему 110 обработки в штатном режиме, систему 120 обработки в режиме работы с ухудшенными характеристиками и модуль 130 управления режимами.
Система 110 обработки в штатном режиме включает в себя, в манере, идентичной системе управления 20, показанной на фиг. 1, глобальный корректор 21, преобразователь 22 и локальный корректор 23. В дополнение к этому, она включает в себя ограничитель 111 C/P, корректор 112 защиты и модуль 113 управления коррекцией. Ограничитель 111 C/P принимает из блока 16 контроля параметры полета и рабочие параметры газотурбинного двигателя и определяет минимальные и максимальные пределы расхода топлива в зависимости от этих параметров. Параметры полета содержат, например, число Маха и высоту летательного аппарата, и рабочие параметры газотурбинного двигателя содержат, например, измерение температуры выхлопных газов M_TM49 и измерение статического давления на входе в камеру M_PS32 сгорания. Корректор 112 защиты также принимает параметры полета и параметры работы газотурбинного двигателя. Из этих параметров корректор 112 защиты вычисляет заданное значение C_WFps массового расхода топлива, обеспечивающую соответствие пороговым параметрам, например, максимальной температуре выхлопных газов TM49_MAX и минимальному статическому давлению на входе в камеру PS32_MIN сгорания. Разумеется, корректор 112 защиты может принимать во внимание и другие параметры. На практике корректор 112 защиты может включать в себя индивидуальный корректор защиты для каждого контролируемого параметра. Общий корректор 21 определяет заданное значение C_WF массового расхода топлива в зависимости от заданного значения C_XNBP скорости и результата измерения M_XNBP скорости вращения. Заданного значения C_WF и C_WFps массового расхода топлива и минимальные и максимальные пределы расхода топлива подаются в модуль 113 управления коррекцией, который проверяет, что заданное значение массового расхода топлива C_WF соответствует минимальным и максимальным пределам расхода топлива и заданному значению C_WFps, и обеспечивает на выходе заданное значение C_WFOK порогового массового расхода топлива. Упомянутое заданное значение C_WFOK преобразуется преобразователем 22 в заданное значение C_Pos положения для дозирующей заслонки 12. Аналогично системе управления, показанной на фиг. 1, заданное значение C_Pos положения передается в локальный корректор 23 для выполнения управления по замкнутому контуру положением дозирующей заслонки 12. Локальный корректор 23 определяет электрический ток I_nom управления в штатном режиме, который при отсутствии срабатывания ограничителя 111 C/P и корректора 112 защиты соответствует электрическому току I_com управления системы 20 управления.
Система 120 обработки в режиме работы с ухудшенными характеристиками включает в себя модуль 121 защиты и прямой корректор 122. Модуль 121 защиты выполнен с возможностью выполнения функций, которые аналогичны функциям ограничителя 111 C/P и корректора 112 защиты. Он принимает параметры полета и рабочие параметры газотурбинного двигателя 10 из блока 16 контроля, датчика 17 температуры и датчика 18 давления. Модуль 121 защиты дополнительно принимает заданное значение C_XNBP скорости и определяет заданное значение C_XNBPOK безопасной скорости. Примерный вариант осуществления модуля 121 защиты будет подробно описан со ссылкой на фиг. 4. Прямой корректор 122 принимает заданное значение C_XNBPOK безопасной скорости и результат измерения скорости M_XNBP вращения и определяет электрический ток I_deg управления в режиме работы с ухудшенными характеристиками в зависимости от этой заданного значения C_XNBPOK безопасной скорости и этого результата измерения скорости M_XNBP вращения. Прямой корректор 122 представляет собой, например, пропорционально-интегральный (PI) корректор.
Модуль 130 управления режимами принимает электрический ток I_nom управления в штатном режиме и электрический ток I_deg управления в режиме работы с ухудшенными характеристиками и подает электрический ток I_com управления для сервоклапана 11. Модуль 130 управления режимами выполнен с возможностью подачи, как и электрического тока I_com управления, электрического тока I_nom управления в штатном режиме при отсутствии отказа в измерении положения дозирующей заслонки 12 и электрического тока управления в режиме работы с ухудшенными характеристиками I_deg в случае отказа. Для этой цели модуль управления режимами может принимать сигнал Sd отказа, вырабатываемый в случае отказа датчика 14 положения. Например, сигнал Sd отказа вырабатывается блоком 16 контроля. В качестве альтернативы, модуль 130 управления режимами может принимать результат измерения положения каждого из чувствительных элементов от датчика 14 положения и на основании этого определять отказ, в частности, в случае отклонения между двумя результатами измерения положения. Таким образом, в зависимости от электрического тока управления, выбранного модулем управления режимами, система 100 управления выполняет управление по замкнутому контуру скоростью XNBP либо с использованием системы 110 обработки в штатном режиме, либо с использованием системы 120 обработки в режиме работы с ухудшенными характеристиками. В этом случае, когда выбран электрический ток I_nom управления в штатном режиме, локальное управление по замкнутому контуру выполняется через локальный корректор 23, сервоклапан 11 и датчик 14 положения, и глобальное управление по замкнутому контуру выполняется одновременно с помощью глобального корректора 21, преобразователя 22, локального корректора 23, сервоклапана 11, дозирующей заслонки 12, двигателя 13 и датчика 15 скорости.
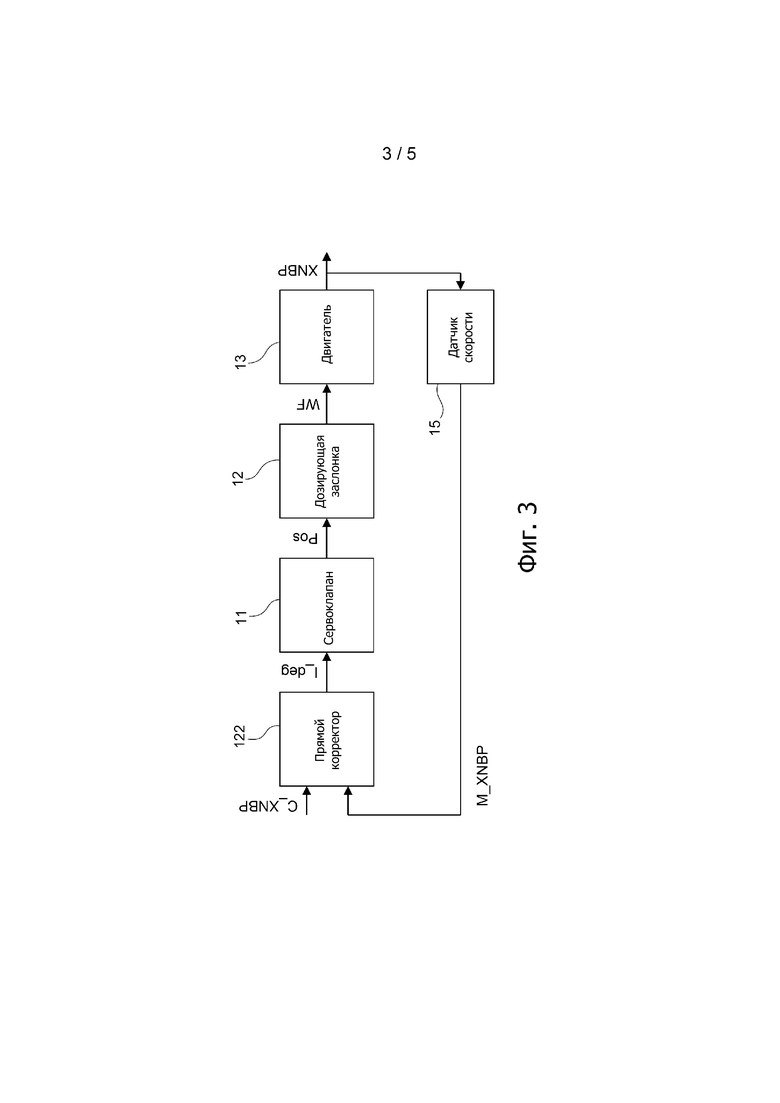
На фиг. 3 показано управление по замкнутому контуру, выполняемое с использованием системы 120 обработки в режиме работы с ухудшенными характеристиками, когда выбран электрический ток I_deg управления в режиме работы с ухудшенными характеристиками. Одиночный контур управления по замкнутому контуру образован прямым корректором 122, сервоклапаном 11, дозирующей заслонкой 12, двигателем 13 и датчиком 15 скорости. Управление по замкнутому контуру можно квалифицировать как «прямое», так как оно не использует результат измерения M_Pos положения дозирующей заслонки 12. Следует отметить, что прямой корректор 122 может напрямую принимать заданное значение C_XNBP скорости, как показано на фиг. 3, при отсутствии модуля 121 защиты.
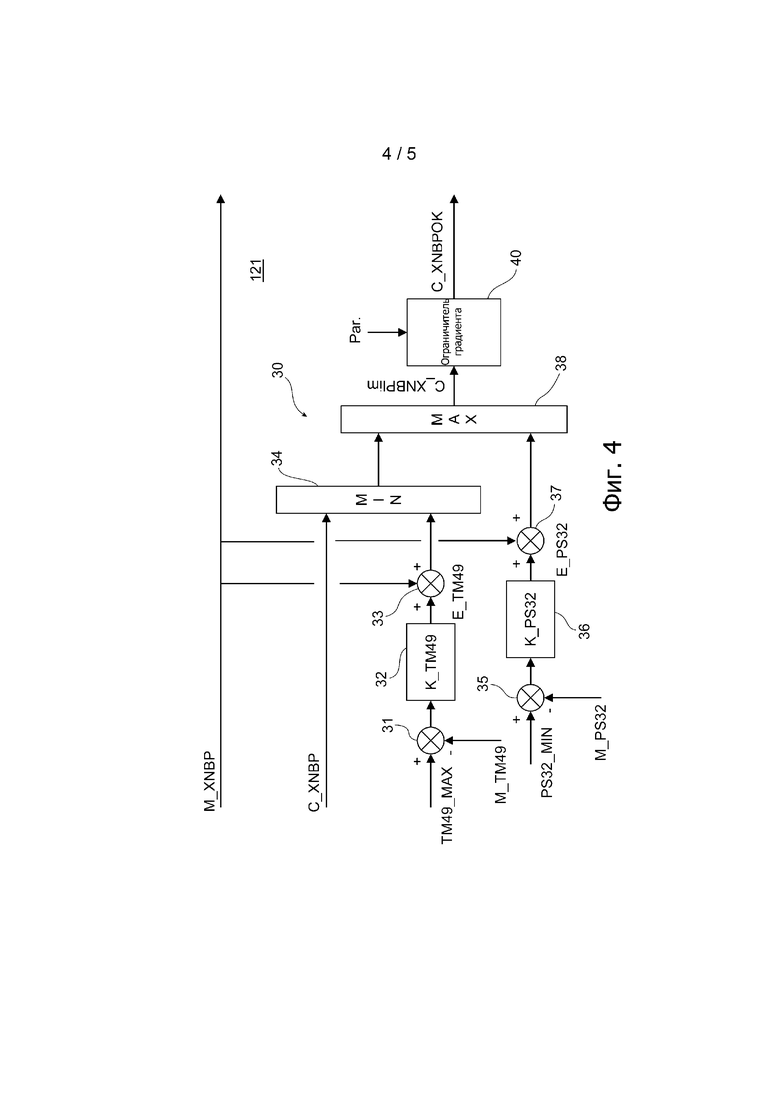
На фиг. 4 показан модуль 121 защиты системы 120 обработки в режиме работы с ухудшенными характеристиками. Модуль 121 защиты содержит схему 30 ограничения и ограничитель 40 градиента. Схема 30 ограничения содержит первый вычитатель 31, первый усилитель 32, первый сумматор 33, оператор 34 MIN, второй вычитатель 35, второй усилитель 36, второй сумматор 37 и оператор 38 MAX. Он выполнен с возможностью приема заданного значения C_XNBP скорости вращения, измерения скорости M_XNBP вращения, измерения температуры выхлопных газов M_TM49 и измерения статического давления на входе в камеру M_PS32 сгорания и подачи заданного значения C_XNBPlim ограниченной скорости. Вычитатель 31 вычитает результат измерения температуры выхлопных газов M_TM49 из максимальной температуры TM49_MAX (TM49_MAX - M_TM49); усилитель 32 вычисляет значение E_TM49, умножая результат вычитания на температурный коэффициент K_TM49 (E_TM49 = K_TM49 × (TM49_MAX - M_TM49)); сумматор 33 суммирует результат этого умножения с результатом измерения скорости M_XNBP вращения: K_TM49 × (TM49_MAX - M_TM49) + M_XNBP; и оператор 34 MIN сравнивает результат этого сложения с заданным значением C_XNBP скорости вращения и сохраняет минимальное значение. Параллельно с этим вычитатель 35 вычитает результат измерения давления M_PS32 из минимального давления PS32_MIN (PS32_MIN - M_PS32); усилитель 36 вычисляет значение E_PS32 путем умножения результата вычитания на коэффициент K_PS32 давления (E_PS32 = K_PS32 × (PS32_MIN - M_PS32)); сумматор 37 суммирует результат этого умножения с результатом измерения скорости M_XNBP вращения (K_PS32 × (PS32_MIN - M_PS32) + M_XNBP); и оператор 38 MAX сравнивает результат этого сложения с минимальным значением, сохраняемым оператором 34 MIN, и сохраняет максимальное значение. Это максимальное значение соответствует заданному значению C_XNBPlim ограниченной скорости.
Схема 30 ограничения позволяет заблокировать работу газотурбинного двигателя 10 при температуре выхлопных газов, превышающей максимальную температуру TM49_MAX, и/или при статическом давлении на входе в камеру сгорания ниже минимального давления PS32_MIN. Действительно, когда результат измерения температуры M_TM49 приближается к максимальной температуре TM49_MAX, сумма значения E_TM49 и результат измерения скорости M_XNBP вращения (E_TM49 + M_XNBP) становится меньше заданного значения C_XNBP скорости вращения. Затем эта сумма используется в качестве заданного значения C_XNBPlim ограниченной скорости вместо заданного значения C_XNBP скорости вращения. Можно заметить, что если измерение температуры M_TM49 равно максимальной температуре TM49_MAX, заданное значение C_XNBPlim ограниченной скорости равно измерению скорости M_XNBP вращения. Аналогичным образом, когда результат измерения давления M_PS32 приближается к минимальному давлению PS32_MIN, сумма значения E_PS32 и результат измерения M_XNBP скорости вращения становятся больше, чем заданное значение C_XNBP скорости вращения. Затем эта сумма используется в качестве заданного значения C_XNBPlim ограниченной скорости вместо заданного значения C_XNBP скорости вращения. В этом примерном варианте осуществления используются только два оператора 34, 38. Тем не менее, результат сложения на выходе сумматора 37 может сравниваться с заданным значением C_XNBP скорости вращения с помощью первого оператора MAX и второго оператора MAX, сравнивающего значения этого первого оператора MAX и оператора 34 MIN. Более того, для определения заданного значения C_XNBPlim ограниченной скорости можно принимать во внимание более двух параметров. В этом случае каждый из этих параметров сравнивается с минимальным или максимальным пороговым параметром, как описано для давления PS32 и температуры TM49. Затем заданное значение C_XNBPlim является результатом максимума значений от различных операторов, каждый из которых ассоциируется с параметром.
Ограничитель 40 градиента принимает заданное значение C_XNBPlim ограниченной скорости и определяет заданное значение ускорения-ограниченной скорости, соответствующую заданному значению C_XNBPOK безопасной скорости. Это заданное значение C_XNBPOK ускорения-ограниченной скорости определяется таким образом, чтобы следовать заданному значению C_XNBPlim ограниченной скорости со скоростью изменения, которая меньше или равна заданному максимальному порогу ускорения. Таким образом, ограничитель 40 градиента позволяет замедлить динамику газотурбинного двигателя и избежать создания отношения расхода топлива к давлению за пределами штатных рабочих диапазонов. Ограничитель 40 градиента может принимать один или несколько параметров полета летательного аппарата и/или один или несколько рабочих параметров газотурбинного двигателя и адаптировать порог максимального ускорения в зависимости от этих параметров. В частности, максимальный порог ускорения может изменяться в зависимости от числа Маха и высоты летательного аппарата, а также от статического давления на входе в камеру PS32 сгорания.
Температурный коэффициент K_TM49 может быть определен путем сравнения, используя модель газотурбинного двигателя, влияния увеличения скорости XNBP вращения на температуру TM49 выхлопных газов. Аналогичным образом можно определить коэффициент K_PS32 давления. Заданный максимальный порог ускорения ограничителя 40 градиента можно определить с использованием моделирования на основе модели газотурбинного двигателя, регулируемой с использованием системы обработки в штатном режиме. Это может соответствовать ускорению, с которого расход топлива превышает максимальный предел ограничителя 111 C/P.
Система 100 управления может иметь чисто аппаратную архитектуру или программную архитектуру, способную выполнять компьютерную программу. Например, она может включать в себя программируемую вентильную матрицу (FPGA), процессор, микропроцессор или микроконтроллер. Более того, функциональная конфигурация элементов системы 100 управления никоим образом не ограничивает аппаратную конфигурацию этих элементов. Таким образом, в качестве примера два элемента, представленные как отдельные, на практике могут быть образованы одним и тем же электрическим или электронным компонентом или их функциями, которые исполняются одним и тем же процессором.
На фиг. 5 показан пример способа управления, реализующего газотурбинный двигатель и систему управления, показанную на фиг. 2. Способ 50 содержит этап 51 контроля, на котором контролируется отказ датчика 14 положения. Этот этап 51 контроля предпочтительно выполняется непрерывно или через регулярные интервалы времени. Он состоит, например, в определении отсутствия результата измерения положения или отклонения между двумя результатами измерения положения, превышающего заданный порог. При отсутствии отказа датчика 14 положения способ переходит к этапу 52 определения заданного значения расхода топлива. На этом этапе 52 заданное значение C_WF массового расхода топлива определяется в зависимости от заданного значения C_XNBP скорости вращения и результата измерения M_XNBP скорости вращения. Этап 52 выполняется глобальным корректором 21, ограничителем 111 C/P, корректором 112 защиты и модулем 113 управления коррекцией. Затем на этапе 53 преобразования заданное значение C_WF массового расхода топлива преобразуется в заданное значение C_Pos положения. Этот этап 53 выполняется преобразователем 22. На этапе 54 определения тока управления в штатном режиме определяется электрический ток I_nom управления в штатном режиме в зависимости от заданного значения C_Pos положения и результата измерения M_Pos положения. На этапе 55 приведения в действие электрический ток I_nom управления в штатном режиме подается на сервоклапан 11, чтобы переместить дозирующую заслонку 12 в желаемое положение. Когда во время этапа 51 контроля обнаруживается отказ датчика 14 положения, способ переключается на этап 56 определения заданного значения безопасной скорости. Этот этап 56 выполняется модулем 121 защиты. Он заключается в определении заданного значения C_XNBPOK безопасной скорости из заданного значения C_XNBP скорости вращения, параметров полета и рабочих параметров газотурбинного двигателя. Затем способ управления включает в себя этап 57 определения тока управления в режиме работы с ухудшенными характеристиками. На этом этапе 57, выполняемом системой 120 обработки в режиме работы с ухудшенными характеристиками, электрический ток I_deg управления в режиме работы с ухудшенными характеристиками определяется в зависимости от заданного значения C_XNBPOK безопасной скорости и результата измерения M_XNBP скорости вращения. Затем на этапе 58 приведения в действие электрический ток I_deg управления в режиме работы с ухудшенными характеристиками подается в сервоклапан 11, чтобы переместить дозирующую заслонку 12 в желаемое положение.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КОНТРОЛЯ СИСТЕМЫ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 2017 |
|
RU2661802C1 |
| УСТРОЙСТВО АВАРИЙНОГО УПРАВЛЕНИЯ ПОДАЧЕЙ ТОПЛИВА В ОСНОВНУЮ КАМЕРУ СГОРАНИЯ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2009 |
|
RU2432477C2 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ НА ПРЕРВАННОМ ВЗЛЕТЕ САМОЛЕТА | 2024 |
|
RU2837365C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ МАСЛОСИСТЕМОЙ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2004 |
|
RU2287074C2 |
| СПОСОБ ДИАГНОСТИКИ И ПАРИРОВАНИЯ ОТКАЗОВ ДАТЧИКОВ РЕГУЛИРУЕМЫХ ПАРАМЕТРОВ ДВУХКАНАЛЬНОЙ ЭЛЕКТРОННОЙ СИСТЕМЫ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2023 |
|
RU2817573C1 |
| Способ управления перепуском воздуха из компрессора низкого давления турбореактивного двухвального двигателя с высокой степенью двухконтурности | 2024 |
|
RU2836207C1 |
| СПОСОБ УПРАВЛЕНИЯ АВИАЦИОННЫМ ВОЗДУШНО-РЕАКТИВНЫМ ДВИГАТЕЛЕМ ЛЕТАТЕЛЬНОГО АППАРАТА | 2016 |
|
RU2646020C1 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 2006 |
|
RU2319025C1 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 2014 |
|
RU2549920C1 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 1989 |
|
RU2007599C1 |
Изобретение относится к системе и способу управления газотурбинного двигателя летательного аппарата. Согласно изобретению система (100) управления содержит: систему (110) обработки в штатном режиме, содержащую глобальный корректор (21), выполненный с возможностью управления скоростью вращения газотурбинного двигателя путем подачи заданного значения (C_WF) положения в устройство дозирования топлива (11, 12), и локальный корректор (23), выполненный с возможностью управления положением дозатора топлива путем подачи тока (I_nom) управления в штатном режиме; систему (120) обработки в режиме работы с ухудшенными характеристиками, содержащую прямой корректор (122), выполненный с возможностью управления скоростью вращения газотурбинного двигателя путем подачи тока (I_dég) управления в режиме работы с ухудшенными характеристиками, и модуль (130) управления режимами, выполненный с возможностью подачи в устройство дозирования топлива электрического тока (I_nom) управления в штатном режиме - при отсутствии отказа датчика положения, измеряющего положение устройства дозирования топлива, и подачи электрического тока (I_dég) управления в режиме работы с ухудшенными характеристиками - в случае отказа датчика положения. 3 н. и 6 з.п. ф-лы, 5 ил.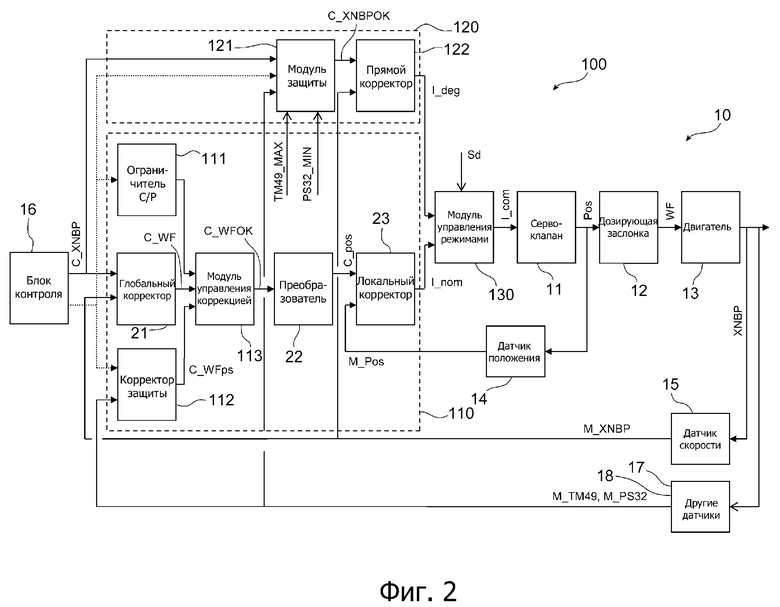
1. Система управления для газотурбинного двигателя летательного аппарата, содержащего:
камеру (13) сгорания,
клапан дозирования топлива, включающий в себя дозирующую заслонку (12), положение которой определяет объемный расход топлива, впрыскиваемого в камеру сгорания, и исполнительный механизм (11), выполненный с возможностью перемещения дозирующей заслонки в зависимости от электрического тока (I_com) управления,
датчик (14) положения, выполненный с возможностью измерения положения дозирующей заслонки и подачи результата измерения положения (M_Pos),
датчик (15) скорости, выполненный с возможностью измерения скорости вращения газотурбинного двигателя и подачи результата измерения (M_XNBP) скорости вращения, и
блок (16) контроля, выполненный с возможностью подачи заданного значения (C_XNBP) скорости вращения для обнаружения отказа датчика положения и для подачи сигнала (Sd) отказа в случае обнаружения отказа датчика положения,
при этом система (100) управления содержит:
систему (110) обработки в штатном режиме, включающую в себя:
глобальный корректор (21), выполненный с возможностью приема заданного значения (C_XNBP) скорости вращения и результата измерения (M_XNBP) скорости вращения и определения заданного значения (C_WF) массового расхода топлива в зависимости от заданного значения (C_XNBP) скорости вращения и результата измерения (M_XNBP) скорости вращения,
преобразователь (22), выполненный с возможностью преобразования заданного значения (C_WF) массового расхода топлива в заданное значение (C_Pos) положения, и
локальный корректор (23), выполненный с возможностью приема заданного значения (C_Pos) положения и результата измерения (M_Pos) положения и определения электрического тока (I_nom) управления в штатном режиме в зависимости от заданного значения (C_Pos) положения и результата измерения (M_Pos) положения,
систему (120) обработки в режиме работы с ухудшенными характеристиками, включающую в себя прямой корректор (122), выполненный с возможностью приема заданного значения (C_XNBP) скорости вращения и результата измерения (M_XNBP) скорости вращения и определения электрического тока (I_deg) управления в режиме работы с ухудшенными характеристиками в зависимости от заданного значения (C_XNBP) скорости вращения и результата измерения (M_XNBP) скорости вращения, и
модуль (130) управления режимами, выполненный с возможностью приема сигнала (Sd) отказа, электрического тока (I_nom) управления в штатном режиме и электрического тока (I_deg) управления в режиме работы с ухудшенными характеристиками и подачи, в исполнительный механизм (11) клапана дозирования топлива, электрического тока (I_nom) управления в штатном режиме при отсутствии приема сигнала отказа, а в случае приема сигнала отказа - подачи электрического тока (I_deg) управления в режиме работы с ухудшенными характеристиками.
2. Система управления по п. 1, в которой прямой корректор (122) выполнен с возможностью дополнительного приема одного или более параметров полета летательного аппарата и/или одного или более рабочих параметров газотурбинного двигателя, причем электрический ток (I_deg) управления в режиме работы с ухудшенными характеристиками дополнительно определяется в зависимости от параметров полета летательного аппарата и/или рабочих параметров газотурбинного двигателя.
3. Система управления по п. 1 или 2, в которой система (120) обработки в режиме работы с ухудшенными характеристиками дополнительно включает в себя ограничитель (40) градиента, выполненный с возможностью приема заданного значения (C_XNBP) скорости вращения и определения заданного значения (C_XNBPOK) ускорения-ограниченной скорости, причем заданное значение ускорения-ограниченной скорости определяется таким образом, чтобы ограничить скорость изменения заданного значения скорости вращения, при этом заданное значение (C_XNBPOK) ускорения-ограниченной скорости используется прямым корректором (122) вместо заданного значения (C_XNBP) скорости вращения.
4. Система управления по п. 3, в которой ограничитель (40) градиента дополнительно выполнен с возможностью приема одного или более параметров полета летательного аппарата и/или одного или более рабочих параметров газотурбинного двигателя, причем заданный максимальный порог ускорения является переменной, которая зависит от параметров полета и/или рабочих параметров газотурбинного двигателя.
5. Система управления по любому из пп. 1-4, в которой система (120) обработки в режиме работы с ухудшенными характеристиками дополнительно включает в себя схему (30) ограничения, выполненную с возможностью приема заданного значения (C_XNBP) скорости вращения, результата измерения (M_XNBP) скорости вращения и рабочего параметра газотурбинного двигателя (M_TM49, M_PS32) и определения заданного значения (C_XNBPlim) ограниченной скорости, причем заданное значение (C_XNBPlim) ограниченной скорости определяется путем вычисления разности между рабочим параметром (M_PS32) и заданным минимальным пороговым параметром (PS32_MIN) или между рабочим параметром (M_TM49) и заданным максимальным пороговым параметром (TM49_MAX) путем умножения упомянутой разности на коэффициент, относящийся к рабочему параметру (K_TM49, K_PS32), путем сложения результата измерения (M_XNBP) скорости вращения с результатом умножения и путем взятия, в качестве заданного значения (C_XNBPlim) ограниченной скорости, максимума между указанным результатом сложения и заданным значением скорости вращения, когда разность вычисляется по отношению к минимальному пороговому параметру, и минимума между указанным результатом сложения и заданным значением скорости вращения, когда разность вычисляется по отношению к максимальному пороговому параметру.
6. Система управления по п. 5, в которой схема (30) ограничения выполнена с возможностью приема, в качестве рабочего параметра, результата измерения давления газотурбинного двигателя (M_PS32), причем разность вычисляется между измеренным давлением и заданным минимальным давлением (PS32_MIN), и/или схема (30) ограничения выполнена с возможностью приема, в качестве рабочего параметра, результата измерения температуры газотурбинного двигателя (TM_49), причем разность вычисляется между результатом измерения температуры и заданной максимальной температурой (TM49_MAX ).
7. Газотурбинный двигатель для летательного аппарата, содержащий:
камеру (13) сгорания,
клапан дозирования топлива, включающий в себя дозирующую заслонку (12), положение которой определяет объемный расход топлива, впрыскиваемого в камеру сгорания, и исполнительный механизм (11), выполненный с возможностью перемещения дозирующей заслонки в зависимости от электрического тока (I_com) управления,
датчик (14) положения, выполненный с возможностью измерения положения дозирующей заслонки и подачи результата измерения положения (M_Pos),
датчик (15) скорости, выполненный с возможностью измерения скорости вращения газотурбинного двигателя и подачи результата измерения (M_XNBP) скорости вращения,
блок (16) контроля, выполненный с возможностью подачи заданного значения (C_XNBP) скорости вращения, для обнаружения отказа датчика положения и подачи сигнала (Sd) отказа в случае обнаружения отказа датчика положения, и
систему (100) управления по любому из пп. 1-6.
8. Газотурбинный двигатель по п. 7, в котором датчик (14) положения содержит первый чувствительный элемент и второй чувствительный элемент, причем первый чувствительный элемент выполнен с возможностью измерения положения дозирующей заслонки и подачи первого результата измерения положения, и второй чувствительный элемент выполнен с возможностью измерения положения дозирующей заслонки и подачи второго результата измерения, при этом блок (16) контроля выполнен с возможностью обнаружения отказа датчика положения в случае отклонения между первым результатом измерения положения и вторым результатом измерения положения, которое превышает заданный порог, или при отсутствии приема первого результата измерения положения и второго результата измерения положения.
9. Способ управления для газотурбинного двигателя летательного аппарата, причем газотурбинный двигатель (10) содержит:
камеру (13) сгорания,
клапан дозирования топлива, включающий в себя дозирующую заслонку (12), положение которой определяет объемный расход топлива, впрыскиваемого в камеру сгорания, и исполнительный механизм (11), выполненный с возможностью перемещения дозирующей заслонки в зависимости от электрического тока (I_com) управления,
датчик (14) положения, выполненный с возможностью измерения положения дозирующей заслонки и подачи результата измерения (M_Pos) положения,
датчик (15) скорости, выполненный с возможностью измерения скорости вращения газотурбинного двигателя и подачи результата измерения (M_XNBP) скорости вращения, и
блок (16) контроля, выполненный с возможностью подачи заданного значения (C_XNBP) скорости вращения, для обнаружения отказа датчика положения и подачи сигнала (Sd) отказа в случае обнаружения отказа датчика положения,
при этом способ управления содержит этапы, на которых:
контролируют (51) отказ датчика (14) положения,
при отсутствии отказа датчика положения,
определяют (52) заданное значение (C_WF) массового расхода топлива в зависимости от заданного значения (C_XNBP) скорости вращения и результата измерения (M_XNBP) скорости вращения,
преобразуют (53) заданное значение (C_WF) массового расхода топлива в заданное значение (C_Pos) положения,
определяют (54) электрический ток управления в штатном режиме (54) в зависимости от заданного значения (C_Pos) положения и результата измерения (M_Pos) положения, и
подают (55) в исполнительный механизм (11) клапана дозирования топлива электрический ток (I_nom) управления в штатном режиме;
в случае отказа датчика положения,
определяют (57) электрический ток (I_deg) управления в режиме работы с ухудшенными характеристиками в зависимости от заданного значения (C_XNBP) скорости вращения и результата измерения (M_XNBP) скорости вращения, и
подают (58) в исполнительный механизм (11) клапана дозирования топлива электрический ток (I_deg) управления в режиме работы с ухудшенными характеристиками.
| US 2007005219 A1, 04.01.2007 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ДВИГАТЕЛЕЙ ВНУТРЕННЕГО СГОРАНИЯ И ЭКСПЕРТНАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2175120C2 |
| Способ управления газотурбинной установкой | 1990 |
|
SU1776842A1 |

