Изобретение относится к гибридной системе привода с системами управления и главным валом вертолета с несущим винтом, соединенным с редуктором, которая может стабилизировать заданный пилотом режим полета, содержащей органы управления пилота, двигатель внутреннего сгорания (ДВС) и электродвигатель (ЭД), оба из которых воздействуют непосредственно на главный вал (3). ДВС соединен с системой управления ДВС, которая может регулировать подачу топлива из топливного бака к ДВС, чтобы обеспечить требуемую движущую силу на главном валу, а ЭД соединен с системой управления ЭД, которая посредством разряда батареи может приводить в действие ЭД или заряжать батарею благодаря механической мощности, создаваемой ЭД, в результате чего главный вал либо приводится в движение, либо, соответственно, тормозится. Изобретение также относится к способу эксплуатации такой гибридной системы привода.
Уровень техники
Как и в автомобильной промышленности, для вертолетов также известен привод с дополнительным электродвигателем, в частности с гибридным приводом.
Система, аналогичная системе, описанной выше, известна из US 2017/0225573 A1. Она включает в себя двигатель внутреннего сгорания и электродвигатель, расположенный между двигателем внутреннего сгорания и редуктором несущего винта. То же самое относится и к US 2018/0354635 A1. В указанном документе описывается способ регулирования посредством различных компьютерных систем распределения между двигателем внутреннего сгорания и электродвигателем.
ИЗ EP 3162713 известна еще одна гибридная система, приводящая в движение вертолет при помощи электродвигателя и двигателя внутреннего сгорания. Цель регулирования, описанного в указанном документе, состоит в поглощении пиков мощности посредством электродвигателя, так что двигатель внутреннего сгорания по возможности эксплуатируется в режиме "устойчивого состояния", также известном как "скользящая средняя мощность". Для достижения этого используемый управляющий сигнал разделяется на высокочастотную и низкочастотную составляющую сигнала, причем более быстрый высокочастотный сигнал передается в электродвигатель, а более медленный низкочастотный сигнал - в двигатель внутреннего сгорания. Таким образом, быстрые изменения берет на себя электродвигатель, в то время как двигатель внутреннего сгорания должен брать на себя изменения мощности только медленно, так сказать, "демпфировано". Недостаток указанного разделения заключается в снижении безопасности в случае отказа одного из двигателей. Поскольку ни один из указанных двигателей не получает весь сигнал, оставшийся двигатель не может сам по себе взять на себя выполнение полетных требований. Дополнительная система контроля должна обнаруживать отказ двигателя и немедленно обеспечивать прием оставшимся двигателем всего сигнала. Любая необходимая дополнительная система управления или контроля опять же представляет собой риск для безопасности полета.
Раскрытие сущности изобретения
Задача настоящего изобретения состоит в описании гибридной системы привода, посредством которой может быть обеспечена как можно более безопасная эксплуатация вертолета. Еще одна задача изобретения заключается в предложении способа, согласно которому может быть осуществлена указанная безопасная эксплуатация. Кроме того, безопасная эксплуатация должна быть обеспечена при минимальном расходе топлива.
Указанные задачи решаются благодаря признакам первых пунктов формулы изобретения соответствующих категорий. Дополнительные предпочтительные варианты осуществления описаны в зависимых пунктах.
Согласно изобретению в гибридной системе привода на главном валу расположено по меньшей мере по одному датчику крутящего момента и одному тахометру, причем как система управления ДВС, так и система управления ЭД при эксплуатации могут получать значения текущей частоты DZ вращения и текущего крутящего момента DM.
Кроме того, в памяти хранятся заданные значения частоты DZ0 вращения и крутящего момента DM0, при которых обеспечивается оптимальный коэффициент полезного действия ДВС. Указанные значения могут быть запрошены системой управления ЭД, причем первое из указанных значений - DZ0 - может быть запрошено также для системы управления ДВС.
Система управления ДВС посредством согласования мощности ДВС в любой момент времени может независимо достигнуть и стабилизировать заданную частоту DZ0 вращения главного вала, что позволяет стабилизировать любой режим полета, заданный органами управления пилота. Кроме того, система управления ЭД посредством применения ЭД может дополнительно приводить в движение или тормозить главный вал, в результате чего изменяется частота DZ вращения, а система управления ДВС автоматически согласует мощность ДВС, чтобы снова достичь и поддерживать заданную частоту DZ0 вращения главного вала.
В системе управления ЭД хранится первая директива, согласно которой ЭД всегда должен воздействовать на главный вал с такой движущей или тормозной силой, которая приводит к тому, что ДВС, если он достиг или, соответственно, поддерживает оптимальную частоту DZ0 вращения главного вала, автоматически создает на главном валу крутящий момент DM0, при котором ДВС достигает оптимальной мощности двигателя.
Предпочтительно ЭД расположен между ДВС и редуктором несущего винта 1. Частота DZ вращения может быть измерена в любом месте главного вала, она везде одинакова. По меньшей мере один из датчиков вращающего момента должен быть расположен между ДВС и ЭД, чтобы определять нагрузку ДВС на главном валу. Другие датчики вращающего момента могут быть расположены между ЭД и редуктором, чтобы определять общую нагрузку на главном валу. Однако определяющим для регулирования системы управления ЭД в первую очередь является датчик вращающего момента между ДВС и ЭД, поскольку он показывает мощность ДВС, который согласно первой директиве должен работать с максимальным коэффициентом полезного действия.
Между органами управления пилота и системой управления ДВС может быть выполнена прямая линия передачи сигналов данных, используемая для взлета и посадки вертолета. На указанных этапах первая директива применяться не должна. Косвенная связь всегда существует благодаря режиму полета вертолета. Если пилот устанавливает больший угол установки лопастей несущего винта, чтобы увеличить высоту, вследствие более высокой нагрузки частота DZ вращения главного вала сразу же падает, после чего в нормальном режиме потребность в мощности устанавливается в соответствии с первой директивой.
Дополнительно на топливном баке может быть расположен указатель уровня, а на батарее - указатель степени заряженности батареи, которые при эксплуатации могут передавать свои данные измерений в систему управления ЭД. Посредством вычислительного блока могут быть рассчитаны соответствующие пока еще имеющиеся в распоряжении энергии. В случае необходимости система управления ЭД может действовать в соответствии со второй директивой, отличающейся от первой директивы. Цель второй директивы может состоять в защите батареи от перезарядки и недозарядки, экономии топлива и/или периодической эксплуатации ДВС с более низкой мощностью для снижения выбросов.
Является важным, чтобы система управления ДВС вместе с ДВС в любое время могла независимо достичь необходимой частоты DZ вращения главного вала, чтобы достичь или, соответственно, стабилизировать режим полета, заданный органами управления пилота. Это означает, что вертолет с его ДВС может быть дооснащен ЭД и системой управления ЭД без необходимости вмешательства в существующую систему управления ДВС. Следствием этого является то, что в случае неисправности системы, когда отказывает ЭД и/или система управления ЭД, вертолетом можно нормально управлять только с ДВС.
Предлагаемый изобретением способ эксплуатации гибридной системы привода для главного вала вертолета обеспечивает требуемый пилотом режим полета путем применения предлагаемой изобретением гибридной системы привода с системами управления. Указанный способ выполняет следующие этапы.
Текущие значения частоты DZ вращения и крутящего момента DM непрерывно измеряют на главном валу и передают как в систему управления ЭД, так и в систему управления ДВС. Заданные значения частоты DZ0 вращения и крутящего момента DM0 хранятся в памяти, причем системой управления ЭД могут быть запрошены оба значения DZ0, DM0, а системой управления ДВС может быть запрошена по меньшей мере частота DZ0 вращения. Обе системы управления постоянно определяют отклонения измеренных значений DZ, DM от известных им заданных значений DZ0, DM0.
Как только пилот посредством органов управления пилота создает измененную потребность в мощности на главном валу, чтобы достичь требуемого режима полета, это также вызывает изменение частоты DZ вращения главного вала. На основе отклонения текущей частоты DZ вращения от заданной частоты DZ0 вращения система управления ДВС медленно изменяет мощность ДВС таким образом, что снова достигается заданная частота DZ0 вращения.
Точнее это поясняется в следующем примере. Система управления ДВС настроена таким образом, что ДВС всегда создает нагрузку, позволяющую достичь и стабилизировать оптимальную частоту DZ0 вращения. Если пилот регулирует лопасти несущего винта для увеличения высоты, то это приводит к понижению частоты DZ вращения. ДВС реагирует на указанное понижение частоты DZ вращения увеличенной мощностью, и создаваемый им крутящий момент DM повышается. Это в свою очередь приводит к тому, что частота DZ вращения повышается. Как только частота вращения снова достигает заданного значения DZ0 и стабилизируется, у системы управления ДВС уже нет причин для изменения мощности двигателя. ДВС продолжает работать без изменений, но с более высоким крутящим моментом DM, чем перед регулировкой лопастей несущего винта. При снижении вертолета соответственно происходит противоположное, и крутящий момент DM, создаваемый ДВС, падает.
Однако в предлагаемом изобретением способе с гибридной системой привода в действие согласно своей первой директиве вступает система управления ЭД. На основе отклонения текущих значений частоты DZ вращения и/или крутящего момента DM от соответствующих заданных значений DZ0, DM0 она более быстрым образом, чем ДВС, изменяет мощность ЭД таким образом, что ДВС после регулирования своей мощности до достижения заданной частоты DZ0 вращения создает заданный крутящий момент DM0, при котором он достигает оптимального коэффициента полезного действия. Система управления ЭД достигает этого посредством того, что она либо благодаря механической мощности ЭД заряжает батарею, либо приводит в действие ЭД посредством заряда в батарее.
Таким образом, в названном выше примере в действие также вступает система управления ЭД. Заданные значения частоты DZ0 вращения и крутящего момента DM0 ей известны, а соответствующие отличия от текущих значений DZ, DM она может определить на основе переданных ей измеренных значений.
Сначала система управления ЭД работает по своей первой директиве. Таким образом, если пилот регулирует лопасти несущего винта для увеличения высоты, сначала частота вращения падает, как описано выше. Однако прежде чем ДВС увеличит свою мощность благодаря увеличению крутящего момента, ЭД, реагирующий значительно быстрее, создает дополнительную требуемую нагрузку, так что снова немедленно достигается требуемая частота DZ0 вращения. Система управления ДВС, также постоянно контролирующая частоту вращения, в лучшем случае воспринимает кратковременное, незначительное отклонение заданной частоты DZ0 вращения, немедленно компенсируемое ЭД, поскольку ЭД сразу же создает необходимую для этого нагрузку. Вследствие большего времени реагирования ДВС он не увеличивает свою мощность, а сохраняет свой первоначально созданный крутящий момент DM.
То же самое происходит при полете со снижением, когда пилот уменьшает угол установки лопастей несущего винта. Батарея ЭД заряжается посредством того, что ЭД тормозит главный вал, прежде чем ДВС сможет компенсировать увеличение частоты вращения и понизить создаваемую им мощность.
Поэтому указанная первая директива системы управления ЭД, с одной стороны, регулирует и стабилизирует частоту DZ0 вращения главного вала посредством того, что она соответствующим образом управляет ЭД. Тем самым она предотвращает изменение нагрузки ДВС, его крутящий момент остается постоянным. Это является желательным, пока указанный крутящий момент соответствует заданному крутящему моменту DM0. Пока это так, коэффициент полезного действия всегда оптимален.
Кроме того, с другой стороны, система управления ЭД также постоянно контролирует соответствие крутящего момента DM, создаваемого на главном валу в данный момент, заданному крутящему моменту DM0. Отклонения могут возникнуть, например, после взлета, при полете с набором высоты или со снижением, или после отказа ЭД, например, вследствие слишком низкой заряженности батареи. Поэтому при установлении отклонения крутящего момента первая директива системы управления ЭД также регулирует указанный измеренный крутящий момент DM до заданного значения DM0 следующим образом. Если измеренный крутящий момент слишком высок, то система управления ЭД регулирует DZ до всегда немного увеличенного значения. Система управления ДВС реагирует на это снижением мощности, в результате чего крутящий момент, создаваемый ДВС, непрерывно уменьшается. Система управления ЭД поддерживает слегка увеличенную частоту вращения до тех пор, пока измеренный крутящий момент DM не будет соответствовать заданному крутящему моменту DM0. Как только это будет достигнуто, мощность ЭД снова быстро уменьшается до тех пор, пока опять не будет достигнута заданная частота DZ0 вращения. Вследствие этого также сохраняется заданный крутящий момент DM0. После этого ДВС работает со своим оптимальным коэффициентом полезного действия, а система управления ЭД снова стабилизирует DZ, чтобы ДВС неизменно обеспечивал свою оптимальную мощность.
Таким образом, при эксплуатации система управления ЭД на основе слишком низкой частоты вращения, если DZ < DZ0, и/или на основе повышенного крутящего момента, если DM > DM0, увеличивает мощность ЭД, и наоборот.
Согласно изобретению при отказе системы управления ЭД система управления ДВС на основе регулирования частоты вращения до заданного значения DZ0 автоматически обеспечивает стабильный режим полета, поскольку требуемая движущая сила обеспечивается посредством ДВС. Для этого не требуется согласование и дополнительный контроль.
В предпочтительном варианте осуществления способа система управления ЭД на основе данных измерений указателя уровня топливного бака, и/или указателя степени заряженности батареи может определять все еще имеющиеся в распоряжении энергии и вследствие этого периодически отклоняться от первой директивы и действовать согласно второй директиве. По указанной второй директиве батарея может целенаправленно заряжаться или разряжаться для защиты батареи, экономии топлива и/или периодической эксплуатации ДВС с более низкой мощностью для снижения выбросов.
Благодаря этому, например, может быть предотвращен глубокий разряд или перезарядка батареи. С другой стороны, при расположении на больших высотах целенаправленно в большей степени может использоваться ЭД, поскольку там сравнительно сильно увеличивается расход топлива. Кроме того, на этапе взлета и/или посадки в зависимости от потребности может эксплуатироваться исключительно ЭД для снижения в районе посадки шума и выбросов отработавших газов, или исключительно ДВС.
В то время как в EP 3162713 сигнал от пилота разделяется на высокочастотную и низкочастотную составляющую сигнала от пилота, чтобы достичь требуемого распределения мощности двух двигателей, в настоящем изобретении распределение мощности в нормальном режиме регулируется посредством первой директивы системы управления ЭД путем того, что измеренную частоту DZ вращения и измеренный крутящий момент DM регулируют до хранящихся в памяти заданных значений DZ0 и DM0. Во время нормального этапа полета, за исключением взлета и посадки, системы управления двух двигателей не получают управляющих сигналов от пилота. ЭД и ДВС регулируют свои мощности для стабилизации заданной частоты вращения DZ0, причем любое отклонение в первую очередь компенсирует более быстро реагирующий ЭД, прежде чем на это сможет среагировать инерционный ДВС. Кроме того, согласно первой директиве ЭД посредством дополнительного обеспечения положительной или отрицательной мощности регулирует крутящий момент DM, создаваемый ДВС, до заданного значения DM0. Таким образом, описанная здесь гибридная система привода очень проста в управлении и функционально надежна, даже в случае внезапного отказа ДВС.
Таким образом, гибридная система привода постоянно эксплуатируется с распределением нагрузки, позволяющим наиболее эффективным образом расходовать имеющееся топливо. Однако это достигается не посредством того, что осуществляются сложные вычисления, а непосредственно и только благодаря тому, что известны соответствующие текущие значения частоты DZ вращения и крутящего момента DM, а также их заданные значения DZ0, DM0.
При отказе ЭД гибридная система привода согласно изобретению становится обычным приводом с ДВС, так как система управления ДВС посредством ДВС с определенной задержкой в каждом случае точно обеспечивает на главном валу требуемый крутящий момент, необходимый для достижения и, соответственно, сохранения режима полета, заданного пилотом.
При отказе ДВС падает частота вращения, что немедленно компенсируется ЭД посредством дополнительной мощности. Благодаря стабилизации частоты DZ вращения обеспечена безопасность полета. Кроме того, система управления ЭД определяет, что крутящий момент DM, создаваемый ДВС, отсутствует, что может означать только то, что ДВС не работает. Таким образом, ЭД берет на себя все обеспечение мощности до тех пор, пока снова не заработает ДВС, или до приземления. Безопасный полет обеспечивается постоянно.
Поскольку каждая из двух систем управления получает одинаковые данные, генерируемые непосредственно в зависимости от режима полета, каждый из двигателей может автономно обеспечить требуемый режим полета. Распределение нагрузок по двум двигателям происходит совершенно автоматически посредством того, что ЭД очень быстро определяет и выполняет свою часть работы, так что ДВС может постоянно работать в оптимальном диапазоне.
Кроме того, при низком уровне топлива система управления ЭД может нагружать ЭД сильнее, чтобы экономить топливо. Для предотвращения глубокого разряда или перезарядки батареи также возможно отклонение от первой директивы. Также ЭД может быть подключен в качестве бустера, чтобы обеспечить дополнительную мощность, например, при перелете высокой горы. С другой стороны, при высокой температуре и/или экстремальных расположениях по высоте, при которых вследствие разряженного воздуха мощность ДВС сильно снижена, ЭД может применяться более интенсивно, если это позволяет заряд батареи, чтобы повысить располагаемый предел мощности или сэкономить топливо. Кроме того, на этапе взлета и/или посадки для снижения шума и выбросов отработавших газов в районе взлета или, соответственно, посадки может эксплуатироваться исключительно ЭД.
Как только исключительная ситуация заканчивается, снова активируется первая директива.
Краткое описание чертежей
Ниже изобретение описывается более подробно и со ссылками на чертежи. На чертежах показано следующее:
фиг. 1 - схематичное представление гибридной системы привода согласно изобретению;
фиг. 2 - графики для описания распределения нагрузки при различных режимах полета, таких как набор высоты, полет на крейсерской скорости и снижение.
Осуществление изобретения
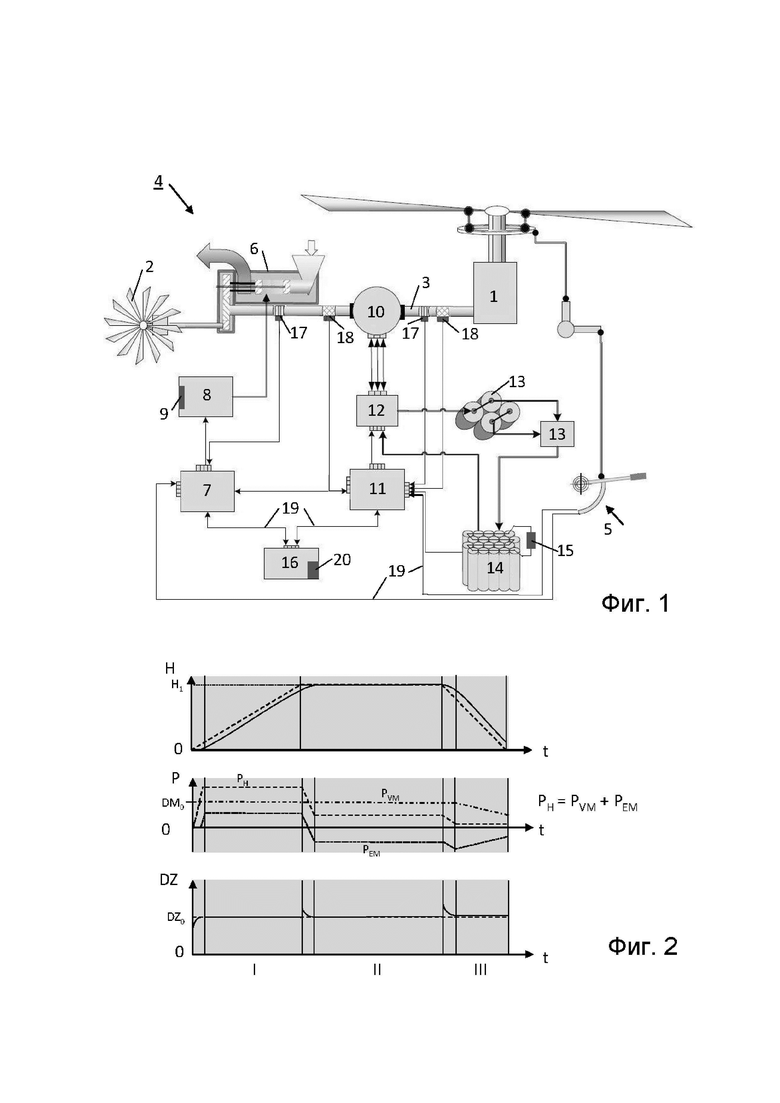
На фиг. 1 подробно, как это необходимо для описания изобретения, показана гибридная система 4 привода согласно изобретению. На указанном чертеже показана часть вертолета с трансмиссией 3, редуктор 1 с несущим винтом и, кроме того, хвостовой винт 2, который для предмета изобретения значения не имеет. На трансмиссии 3 параллельно расположены двигатель внутреннего сгорания (ДВС) 6 и электродвигатель (ЭД) 10, причем ЭД 10 предпочтительно расположен между ДВС 6 и редуктором несущего винта 1. Возможны и другие компоновки.
Органы 5 управления пилота обеспечивают прием сигналов управления от пилота для регулировки лопастей несущего винта, в результате чего регулируемая мощность двигателя, подлежащая установке, получается косвенным образом, в виде требуемой частоты DZ0 вращения главного вала 3. При необходимости, линия 19 передачи сигналов данных, проходящая от органов управления пилота к системе 7 управления ДВС, может быть использована для взлета и посадки.
ДВС 6 соединен с топливным баком 8, соединенным с системой 7 управления ДВС, которая может регулировать подачу топлива из топливного бака 8 к ДВС 6 для обеспечения необходимой движущей силы на главном валу 3. Кроме того, ЭД 10 соединен с батареей 14, предпочтительно через статический преобразователь 12 тока и зарядное устройство 13, которое может быть оснащено буферизацией для защиты от пиков тока. ЭД 10 может приводиться в действие благодаря заряду батареи 14, или батарея 14 может заряжаться благодаря механической мощности на ЭД 10, в результате чего главный вал 3 может либо приводиться в движение, либо тормозиться. Система 11 управления ЭД по меньшей мере косвенным образом, например, через статический преобразователь 12 тока, соединена с ЭД 10 и может регулировать его для обеспечения на главном валу 3 необходимой движущей или тормозной силы.
Кроме того, на топливном баке 8 может быть расположен указатель 9 уровня, а на батарее 14 - указатель 15 степени заряженности батареи, которые при эксплуатации могут передавать свои данные измерений в вычислительный блок 16.
На главном валу 3 расположено по меньшей мере по одному датчику 17 крутящего момента и тахометру 18. При эксплуатации система 7 управления ДВС и система 11 управления ЭД получают данные от по меньшей мере одного датчика 17 крутящего момента и по меньшей мере одного тахометра 18.
Вычислительный блок 16 соединен с системой 11 управления ЭД и системой 7 управления ДВС. Он используется для вычисления еще имеющейся в распоряжении энергии, необходимого крутящего момента на главном валу 3 и/или для управления системой 11 управления ЭД. Он содержит память 20 данных, в которой хранятся значения заданной частоты DZ0 вращения и заданного крутящего момента DM0, причем при указанных значениях достигается оптимальный ввод мощности ДВС 6, а коэффициент полезного действия ДВС при указанных значениях максимален.
При эксплуатации распределение нагрузок на ДВС 6 и ЭД 10 вызывается системой 11 управления ЭД. Схематично это показано на фиг. 2.
Пунктирная кривая на верхней диаграмме показывает режим полета как функцию времени, в каждом случае требуемый органами 5 управления пилота, в частности высоту H полета. Здесь под высотой полета "0" следует понимать землю. Сплошная линия показывает фактическую высоту H полета, она немного задержана. На первом этапе (I) вертолет постоянно набирает высоту до тех пор, пока он не достигнет желательной высоты H1 полета. На втором этапе (II) он постоянно продолжает летать на указанной высоте, а на третьем этапе (III) снова снижается. Между всеми этапами полета проходит некоторое время, пока не будет достигнута вновь заданная цель.
Кривые на средней диаграмме схематично показывают общую нагрузку PH, т.е. общий крутящий момент на несущем винте (штриховая линия), нагрузку PVM на ДВС 6 (штрихпунктирная линия) и нагрузку PEM на ЭД 10 (пунктирная линия). Нижняя диаграмма показывает частоту DZ вращения.
После процесса взлета ДВС 6 работает на стабильно высоком уровне. На первом этапе I ЭД 10 работает в качестве дополнительного привода, как только ДВС 6 достигает заданной оптимальной нагрузки PVM, посредством того, что он прикладывает крутящий момент DM0. Он поддерживает ДВС 6 при полете с набором высоты во время этапа I до тех пор, пока не будет достигнута заданная высота H1 полета, т.е. пока пилот немного не уменьшит угол установки лопастей несущего винта. Процесс взлета может происходить с отклонением от первой директивы до тех пор, пока вертолет не окажется в воздухе в безопасном положении.
В результате уменьшения угла установки лопастей несущего винта в начале этапа II частота DZ вращения кратковременно немного увеличивается, как видно из нижней диаграммы. ЭД 10 немедленно реагирует на это и снижает свою мощность до тех пор, пока частота DZ вращения снова не будет соответствовать заданному значению DZ0. После этого высота полета остается постоянной во время всего этапа II. ДВС 6 инерционен и поэтому не реагирует на указанное кратковременное изменение. В показанном примере на этапе II нагрузка на ЭД 10 отрицательна, таким образом, он в качестве генератора снова заряжает батарею 14 энергией, дополнительно имеющейся в распоряжении вследствие избытка мощности от ДВС 6. На этапе II ДВС 6 свою нагрузку также не изменяет.
В начале полета со снижением, в начале этапа III, пилот снова уменьшает угол установки лопастей несущего винта, частота DZ вращения опять кратковременно увеличивается, и ЭД 10 вновь реагирует на это снижением своей мощности. Однако в этот раз он согласно своей второй директиве осуществляет регулирование до частоты DZ вращения, которая немного больше заданного значения DZ0. Теперь энергия на ЭД 6 немедленно рекуперируется еще сильнее, поскольку ЭД 10 еще больше тормозит главный вал 3. Поскольку частота DZ вращения немного увеличена, ДВС 6 реагирует посредством того, что он постоянно снижает свою мощность. При этом ЭД 10 поддерживает повышенную частоту DZ вращения, как показано посредством нижней кривой на этапе III. Сплошная линия, показывающая текущую частоту DZ вращения, расположена выше пунктирной линии, представляющей DZ0.
Поскольку текущая частота DZ вращения больше заданной частоты DZ0 вращения, мощность на ДВС 6 падает и, таким образом, в месте посадки уменьшается шум и выбросы отработавших газов. Это достигается посредством того, что ЭД 10 постоянно уменьшает мощность, генерируемую электрическим способом, и, таким образом, ослабляет свое тормозное действие.
Согласно изобретению частота DZ вращения главного вала 3 по первой директиве регулируется только посредством ЭД 10 таким образом, что при DM0 ДВС 6 она стабилизируется на уровне заданной частоты DZ0 вращения. Согласно второй директиве, как показано на этапе III, происходит отклонение от этого, чтобы целенаправленно снизить нагрузку на ДВС 6. Помимо указанного выше снижения выбросов отклонение от первой директивы может иметь и другие основания. В частности, таким основанием может быть целенаправленный заряд или, соответственно, разряд батареи 14, если того требует степень ее заряженности. Кроме того, ЭД 10 может быть подключен в качестве бустера, чтобы кратковременно обеспечить повышенную мощность или сэкономить топливо, например, на больших высотах.
Вторая директива может регулироваться, например, на основании того, что известны запасы энергии, если система 11 управления ЭД имеет данные о степени заряженности батареи 14 и запаса топлива, на основании норм допустимых уровней шума в зависимости от высоты перелета и/или предварительной информации о запланированной траектории полета.
Перечень ссылочных обозначений
1 редуктор с несущим винтом
2 хвостовой винт
3 главный вал
4 гибридная система привода
5 органы управления пилота
6 двигатель внутреннего сгорания (ДВС)
7 система управления ДВС
8 топливный бак
9 указатель уровня
10 электродвигатель (ЭД)
11 система управления ЭД
12 статический преобразователь тока
13 зарядное устройство
14 батарея
15 указатель степени заряженности батареи
16 вычислительный блок
17 датчик крутящего момента
18 тахометр
19 линия передачи сигналов данных
20 память данных со значением оптимальной частоты вращения ДВС
I первый этап, полет с набором высоты
II второй этап, постоянная высота полета
III третий этап, полет со снижением
t время
H текущая высота полета
H1 высота полета, которую необходимо достичь
P мощность (избыточная по отношению к крутящему моменту)
PH общая мощность
PEM мощность на ЭД
PVM мощность на ДВС
DZ частота вращения главного вала, измеренная
DZ0 оптимальная частота вращения
DM крутящий момент на главном валу, измеренный
DM0 заданный крутящий момент.
Изобретение относится к летательным аппаратам. Гибридная система привода с системами управления и главным валом вертолета с несущим винтом, соединенным с редуктором, содержит органы управления пилота, двигатель внутреннего сгорания (ДВС) и электродвигатель (ЭД), оба из которых воздействуют на главный вал. На главном валу расположены датчики крутящего момента и тахометры. Система управления ДВС в любой момент времени способна независимо достигнуть заданной частоты вращения главного вала и стабилизировать ее для стабилизации любого режима полета, заданного органами управления пилота. Система управления ЭД дополнительно приводит в движение или тормозит главный вал. В системе управления ЭД хранится первая директива, с тем, чтобы всегда воздействовать на главный вал с такой движущей или тормозной силой, которая приводит к тому, что ДВС, если он достиг оптимальной частоты вращения главного вала, или поддерживает ее, автоматически создает на главном валу крутящий момент, при котором ДВС достигает оптимальной мощности. Повышается безопасность эксплуатации вертолета. 2 н. и 7 з.п. ф-лы, 2 ил.
1. Гибридная система (4) привода с системами (5, 7, 11) управления и главным валом (3) вертолета с несущим винтом (1), соединенным с редуктором, которая способна стабилизировать заданный пилотом режим полета, содержащая
- органы (5) управления пилота,
- двигатель внутреннего сгорания (ДВС) (6) и электродвигатель (ЭД) (10), оба из которых воздействуют непосредственно на главный вал (3),
- причем ДВС (6) соединен с системой (7) управления ДВС, которая способна регулировать подачу топлива из топливного бака (8) к ДВС (6), для обеспечения требуемой движущей силы на главном валу (3);
- и при этом ЭД (10) соединен с системой (11) управления ЭД, которая способна приводить в действие ЭД (10) посредством разряда батареи (14) или заряда батареи (14) благодаря механической мощности, создаваемой ЭД (10), в результате чего главный вал (3) либо приводится в движение, либо, соответственно, тормозится,
отличающаяся тем,
- что на главном валу (3) расположен один или более датчиков (17) крутящего момента и тахометров (18), и как для системы (7) управления ДВС, так и системы (11) управления ЭД при эксплуатации обеспечена возможностью получения значения текущей частоты (DZ) вращения и текущего крутящего момента (DM),
- причем заданные значения частоты (DZ0) вращения и крутящего момента (DM0), при которых ДВС (6) способен достичь своего оптимального коэффициента полезного действия, хранят в памяти и запрашивают для системы (11) управления ЭД, причем первое (DZ0) из указанных значений применимо для запроса также для системы (7) управления ДВС,
- и что система (7) управления ДВС посредством согласования мощности ДВС (6) в любой момент времени способна независимо достигнуть заданной частоты (DZ0) вращения главного вала (3) и стабилизировать ее для стабилизации любого режима полета, заданного органами (5) управления пилота,
- причем система (11) управления ЭД посредством применения ЭД (10) способна дополнительно приводить в движение или тормозить главный вал (3), благодаря чему система (7) управления ДВС на основе текущей частоты (DZ) вращения способна автоматически согласовать мощность ДВС (6) для достижения или, соответственно, поддержания заданной частоты (DZ0) вращения главного вала (3),
- и при этом в системе (11) управления ЭД хранится первая директива, с тем чтобы ЭД (10) всегда воздействовал на главный вал (3) с такой движущей или тормозной силой, которая приводит к тому, что ДВС (6), если он достиг оптимальной частоты (DZ0) вращения главного вала (3) или, соответственно, поддерживает ее, автоматически создает на главном валу (3) крутящий момент (DM0), при котором ДВС достигает оптимальной мощности двигателя.
2. Гибридная система (4) привода по п. 1, отличающаяся тем, что ЭД (10) расположен между ДВС (6) и редуктором несущего винта (1).
3. Гибридная система (4) привода по п. 1 или 2, отличающаяся тем, что между органами (5) управления пилота и системой (7) управления ДВС выполнена прямая линия (19) передачи сигналов данных для взлета и посадки вертолета.
4. Гибридная система (4) привода по одному из предыдущих пунктов, отличающаяся тем, что, кроме того, на топливном баке (8) расположен указатель (9) уровня, а на батарее (14) расположен указатель (15) степени заряженности батареи, которые при эксплуатации способны передавать свои данные измерений в систему (11) управления ЭД.
5. Гибридная система (4) привода по п. 4, отличающаяся тем, что она содержит вычислительный блок (16) для вычисления пока еще имеющихся в распоряжении энергий и в случае необходимости для вычисления второй директивы, отличающейся от первой директивы, для защиты батареи от перезарядки и недозарядки, экономии топлива и/или периодической эксплуатации ДВС (6) с более низкой мощностью для снижения выбросов.
6. Способ эксплуатации гибридной системы (4) привода для главного вала (3) вертолета для обеспечения требуемого пилотом режима полета с использованием гибридной системы (4) привода с системами (5, 7, 11) управления по одному из предыдущих пунктов, отличающийся этапами, на которых:
- на главном валу (3) непрерывно измеряют текущие значения (DZ, DM) частоты вращения и крутящего момента и передают как в систему (11) управления ЭД, так и в систему (7) управления ДВС,
- заданные значения частоты (DZ0) вращения и крутящего момента (DM0) хранят в памяти, причем обеспечена возможность запроса обоих значений (DZ0, DM0) системой (11) управления ЭД и по меньшей мере частоты (DZ0) вращения системой (7) управления ДВС, причем эти системы (7, 11) управления постоянно определяют отклонения измеренных значений (DZ, DM) от заданных значений (DZ0, DM0),
- как только пилот посредством органов (5) управления пилота создает изменяемую потребность в мощности на главном валу (3), чтобы достичь желательного режима полета, это также вызывает изменение частоты (DZ) вращения главного вала (3),
- система (7) управления ДВС на основе отклонения текущей частоты (DZ) вращения от заданной частоты (DZ0) вращения медленно изменяет мощность ДВС (6) таким образом, что достигается заданная частота (DZ0) вращения,
- система (11) управления ЭД согласно своей первой директиве на основе отклонения текущих значений частоты (DZ) вращения и/или крутящего момента (DM) от соответствующих заданных значений (DZ0, DM0) более быстрым образом, чем ДВС (6), изменяет мощность ЭД (10) таким образом, что ДВС (6) после замедленного регулирования своей мощности до достижения заданной частоты (DZ0) вращения создает заданный крутящий момент (DM0), при котором он достигает оптимального коэффициента полезного действия,
- вследствие чего либо батарея (14) заряжена благодаря механической мощности на ЭД (10), либо ЭД (10) приведен в действие благодаря заряду батареи (14),
- и при отказе системы (11) управления ЭД система (7) управления ДВС на основе регулирования частоты вращения до заданного значения (DZ0) автоматически посредством ДВС (7) обеспечивает требуемую движущую силу и таким образом, стабильный режим полета.
7. Способ по п. 6 с использованием гибридной системы (4) привода по п. 5, отличающийся тем, что система (11) управления ЭД на основе данных измерений указателя (9) уровня топливного бака (8) и/или указателя (15) степени заряженности батареи (14) определяет все еще имеющуюся в распоряжении энергию и вследствие этого согласно второй директиве отклоняется от регулирования первой директивы, чтобы целенаправленно заряжать или разряжать батарею (14) для защиты батареи, экономии топлива и/или периодической эксплуатации ДВС (6) с более низкой мощностью для снижения выбросов.
8. Способ по одному из пп. 6 или 7, отличающийся тем, что на этапе взлета и/или посадки эксплуатируют исключительно ЭД (10) для снижения в районе посадки шума и выбросов отработавших газов.
9. Способ по одному из пп. 6-8, отличающийся тем, что при эксплуатации система (11) управления ЭД на основе слишком низкой частоты вращения (DZ < DZ0) и/или повышенного крутящего момента (DM > DM0) увеличивает мощность ЭД (10), и наоборот.
| EP 3162713 A1, 03.05.2017 | |||
| CN 108082499 A, 29.05.2018 | |||
| СПОСОБ ПОМОЩИ ПИЛОТУ ОДНОДВИГАТЕЛЬНОГО ВИНТОКРЫЛОГО ЛЕТАТЕЛЬНОГО АППАРАТА В РЕЖИМЕ АВТОРОТАЦИИ | 2013 |
|
RU2556055C2 |
| DE 102010021026 A1, 24.11.2011 | |||
| WO 2019211549 A1, 07.11.2019 | |||
| WO 2014182616 A2, 13.11.2014. | |||

