Изобретение относится к области авиационной техники и касается создания беспилотных и скоростных турбоэлектрических вертолетов с ярусным расположением несущих винтов в двух меньших в поворотных кольцевых каналах и один больший над ними, обеспечивающих возможность выполнения технологии вертикального или короткого взлета и посадки, но и короткого взлета и вертикальной посадки (КВВП) для наземного или аэродромного, но и палубного базирования.
Известен экспериментальный электрический вертолет модели Firefly компании «Sikorsky» (США), выполненный по одновинтовой несущей схеме с трехлопастным несущим и двухлопастным рулевым винтами, содержит силовую установку, включающую электродвигатель, передающий крутящий момент через валы трансмиссии на несущий и рулевой винты, вертикальный стреловидный киль с рулевым винтом, смонтированным над хвостовой балкой, снабженной впереди киля горизонтальным оперением, полозковое шасси, оснащенное колесами для рулежки по земле.
Признаки, совпадающие - наличие одновинтовой несущей схемы с рулевым винтом и однодвигательной силовой установки с электромотором, передающим через валы трансмиссии взлетную мощность трехлопастному несущему и двухлопастному рулевому винтам, обеспечивающим перемещение вверх-вниз, вперед-назад, влево-вправо и в любой комбинации при его поступательном горизонтальном полете. Вращение несущего и рулевого винтов - синхронизирующее. Электровертолет Sikorsky Firefly, выполненный на базе вертолета классической конструкции с рулевым винтом модели S-300C, имеет двухсотсильный электродвигатель, который крепится на проверенную временем раму модели Hughes 269. Две установленные по бокам фюзеляжа литиево-ионные полимерные батареи весом 265 кг способны выдать до 135 ампер-часов - этого вполне достаточно для того, чтобы этот экспериментальный электровертолет после выполнения вертикального взлета и посадки мог выполнить самый энергозатратный этап полета - зависание в воздухе продолжительностью до 15 минут.
Причины, препятствующие поставленной задаче: первая - это то, что вертолет с движителем в виде несущего трехлопастного винта, имеющего автомат перекоса, имеет большой объем регламентных работ и является дорогим в эксплуатации, но и малую весовую отдачу; вторая - это то, что силовая установка дорогостоящего электрического вертолета включает один электродвигатель и тем самым снижает надежность крейсерского полета при его отказе; третья - это то, что в вертолете одновинтовой несущей схемы имеют место непроизводительные затраты до 10-14% мощности силовой установки на привод рулевого винта, необходимость хвостовой балки и агрегатов хвостовой трансмиссии, а также опасность, создаваемая рулевым винтом для наземного персонала; четвертая - это то, что вес рулевого винта вместе с хвостовой балкой и агрегатами хвостовой трансмиссии составляет до 15…20% веса пустого электровертолета и имеет тенденцию к увеличению с ростом взлетного его веса. Все это и ограничивает возможность коммерческого использования с непрерывным полетом вертолета не менее одного часа, а также дальнейшего повышения максимальной скорости полета и скороподъемности, но и показателей транспортной эффективности.
Известен беспилотный электроконвертоплан (БЭКП) фирмы Agusta Westland "Project Zero" (Италия) [патент ЕР 2551190 от 29.07.2011], представляющий собой моноплан со среднерасположенным необычной формы крылом, имеющим с концевыми крылышками внешние съемные части крыла от кольцевых консолей крыла, внутри последних смонтированы электромоторы с винтами, установленными в поворотных мотогондолах, при повороте которых он преобразовывается в вертолет двухвинтовой поперечной схемы, содержит в фюзеляже из углепластика систему управления и аккумуляторные батареи, двухкилевое V-образное хвостовое оперение и трехстоечное убирающееся колесное шасси с носовой вспомогательной и главными опорами.
Признаки, совпадающие - наличие поворотных мотогондол с винтами, создающими горизонтальную и соответствующим отклонением вертикальную тягу, диапазон поворота мотогондол с винтами от 0°C до +97,5° содержит систему управления, равномерно распределяющую зарядку аккумуляторов полномасштабного БЭКП между поворотными электромоторами с тянущими винтами, обеспечивающими скорость до 500 км/ч и высоту полета до 7500 м, двухкилевое V-образное хвостовое оперение и трехстоечное убирающееся колесное шасси с носовой вспомогательной опорой. Для зарядки аккумуляторов воздушные винты при его нахождении на земле могут выставляться в "наклонном" положении, играя роль ветряков электрогенераторов.
Причины, препятствующие поставленной задаче: первая - это то, что консольное размещение в кольцевых консолях крыла поворотных мотогондол с электромоторами и винтами предопределяет конструктивно сложное крыло необычной формы, оснащенное сложной механизацией и рулевыми поверхностями крыла □ элевонами, что усложняет конструкцию. Вторая - это то, что диаметры двух тянущих винтов ограничены размахом кольцевых консолей крыла и, как следствие, ограничивает вертикальную тяговооруженность, а возможность короткого взлета и посадки с отклоненными вверх тянущими винтами на угол 45° при обеспечении угла опрокидывания φ=15° предопределяет удлинение высоты стоек шасси на 10-12%. Третья - это то, что горизонтальная тяга винтов обеспечивается только в крейсерском полете, поэтому после его выполнения и при возможном отказе узлов поворота мотогондол с винтами взлетать и садиться «по-самолетному», как обычный самолет, этот двухвинтовой БЭКП не может, так как радиус его тянущих винтов гораздо больше высоты установки мотогондол внутри кольцевых консолей крыла, что значительно уменьшает безопасность и сложность продольного и поперечного управления с V-образным хвостовым оперением, особенно на переходных режимах полета, когда у такого крыла вектор его тяги не уравновешивается. Недостатком является также неразвитое хвостовое оперение, отсюда плохая и путевая устойчивость, и особенно при отказе одного из электромоторов при асимметрии тяги. Все это ограничивает возможность дальнейшего увеличения взлетного веса и весовой отдачи при повышении тяговооруженности.
Наиболее близким к предлагаемому изобретению является вертолет-самолет-амфибия [патент RU 2310583 от 15.11.2005], содержащий трехвинтовую ярусную схему с двумя винтами в кольцевых каналах на поворотных консолях крыла и над ними на пилоне несущий винт, имеющий газотурбинные двигатели и систему трансмиссии, включающую основные и центральный редукторы с валами, вращающими несущий и тянущие винты в кольцевых каналах, и на конце хвостовой балки за стабилизатором газовые струйные рули путевого и продольного управления, трехопорную схему колесного шасси с главными колесами, убираемыми в обтекатели бортовых выступов.
Признаки, совпадающие - наличие на пилоне двухлопастного несущего винта, имеющего S-образную форму в плане, и под ним на поворотных консолях высокорасположенного крыла, имеющего диапазон поворота от -5° до +95° с двумя кольцевыми каналами, снабженными тянущими винтами, создающими горизонтальную и соответствующим их отклонением на угол 90° - вертикальную тягу или наклонную тягу - на угол 30° соответственно при выполнении вертикального взлета и посадки (ВВП) или короткого взлета и посадки (КВП) с перегрузочным (до 20%) взлетным весом и оснащенных в их центре редукторами винтов. Последние связаны соединительными валами с главным редуктором, приводимым газотурбинным двигателем, который снабжен газоотводящими системами для газовых струйных рулей путевого и продольного управления, смонтированных на конце хвостовой балки за двухкилевым оперением.
Причины, препятствующие поставленной задаче: первая - это то, что ярусное расположение двух винтов в кольцевых каналах на поворотных консолях высокорасположенного крыла и над ними несущего винта предопределяет увеличение его габаритных размеров по высоте, затрудняющих его базирование и эксплуатацию на кораблях. Это также приводит и к уменьшению габаритных размеров поворотных кольцевых каналов и, как следствие, винты выполнены небольшого диаметра. Поэтому при создании ими вертикальной тяги, образуя малую ометаемую площадь, вызывают значительную нагрузку на нее и большую скорость отбрасываемого воздушного потока от поверхности, ухудшающего взаимовлияние винтов, особенно работающих по тянущей схеме и при одинаковом направлении вращения несущего и тянущих консольных винтов. Вторая - это то, что винты, смонтированные на поворотных консолях высокорасположенного крыла в кольцевых каналах, имеют близкое расположение их линий вертикальной тяги от центра масс, что осложняет поперечную управляемость как на вертолетных, так и на переходных режимах полета. Третья - это то, что газотурбинный двигатель снабжен газовыми рулями путевого и продольного управления. Подобная схема увеличивает сложность и массу конструкции, приводит к необходимости увеличения длины хвостовой балки с газоотводящей удлинительной сопловой трубкой и к взаимовлиянию путевого и продольного управления, приводящему к запаздыванию путевого управления на 0,5-1 секунды по сравнению с управлением рулевым винтом. Кроме того, непроизводительные затраты мощности, требуемые для парирования реактивного крутящего момента несущего винта реактивными соплами, составляют 8-10% от мощности силовой установки (СУ). Все это ограничивает возможность повышения путевой и продольной управляемости и, следовательно, сверхманевренности при висении, а также дальнейшего повышения взлетного веса и полезной нагрузки, дальности полета и показателей транспортной эффективности.
Предлагаемым изобретением решается задача в указанном выше известном вертолете-самолете-амфибии упрощения конструкции и исключения газовых струйных рулей продольного и путевого управления, а также элеронов на крыле и валов трансмиссии, повышения взлетного веса и увеличения весовой отдачи, уменьшения потребной мощности на путевую балансировку при висении и улучшения путевой и продольной управляемости, повышения скорости, высоты и дальности полета.
Отличительными признаками предлагаемого изобретения от указанного выше известного вертолета-самолета-амфибии, наиболее близкого к нему, являются наличие того, что он наряду с ярусным расположением движительно-несущих одновинтовой и двухвинтовой систем, последняя из которых оснащена толкающими винтами, имеющими одинаковое направление вращения между собой и противоположное с несущим винтом, выполнен как по технологии многорежимной аэродинамической системы управления балансировкой по тангажу и курсу, так и снабжен возможностью преобразования его полетной конфигурации наряду с вертолетом трехвинтовой несущей схемы с разновеликими несущими винтами, имеющего в одновинтовой и двухвинтовой системах соответственно несущий винт большего и толкающие винты меньшего диаметра, в полетную конфигурацию крылатого автожира, имеющего раздельные движительную систему с толкающими винтами, и несущие системы, включающие соответственно несущий винт и низкорасположенное трапециевидное крыло малого удлинения, центр давления последнего при поступательном горизонтальном полете расположен вдоль подъемной силы авторотирующего несущего винта с обеспечением сложения соответствующих подъемных сил от двух несущих систем, но и обратно; поворотные консоли крыла, имеющие электромеханический привод, обеспечивающий диапазон поворота крыла на положительные углы атаки (αкр) от 0° до +100°, снабжены возможностью синфазного ускоренного их синхронного отклонения с толкающими винтами в кольцевых каналах от вертикально расположенного крыла назад и вперед по полету на угол αкр=+10° и αкр=-10 соответственно от +90° до +100° и от +90° до +80° как для управления по тангажу при висении, так и возможности зависания на месте при попутном и встречном ветре соответственно, кольцевые каналы, смонтированные на концах крыла, оснащены соосно узлам поворота консолей последнего независимыми электромеханическими узлами их поворота в вертикальной продольной плоскости относительно соответствующей консоли крыла на угол αкр2=±15°, снабжены в каждом конечном положении поворота консолей крыла возможностью дифференциального, но и синфазного ускоренного отклонения кольцевых каналов с толкающими винтами на соответствующие углы атаки (αкр2) от их линий вертикальной и горизонтальной тяги соответственно вперед-назад и вверх-вниз для сверхманевренного управления по курсу с компенсацией реактивного момента от работы несущего винта и поперечного управления соответственно при вертикальном взлете/посадке, висении и горизонтальном полете, но и вверх при коротком взлете/ посадке, причем после его полета в конфигурации крылатого автожира с горизонтально расположенным крылом и в случае отказа узлов его поворота парирование реактивного момента от работы несущего винта при висении создается дифференциальным изменением горизонтальной или силы, или направления тяги реверсивных толкающих винтов, силовая установка, выполненная по параллельно-последовательной гибридной технологии силового привода, состоящая из электрических консольных и центральной мотогондол соответственно с толкающими и несущим винтами, первые две из которых, имея равные между собой и их суммарную меньшую вертикальные тяги толкающих винтов, обеспечивающих при пиковой мощности соответствующих электромоторов меньшую подъемную силу, составляющую 1/3 от взлетного веса в сравнении с подъемной силой несущего винта, снабжены левым и правым электромоторами, выполненными с возможностью их работы при различных углах отклонения в вертикальной продольной плоскости и вращательно связанными с толкающими винтами, смонтированы в соответствующих мотогондолах, вынесенных с толкающими винтами за заднюю кромку внутрикольцевой части крыла соответствующих кольцевых каналов, имеющих на их выходе развитые несущие аэродинамические поверхности с V-образной в плане задней кромкой, смонтированные вдоль средней линии внутрикольцевой части крыла, а центральная мотогондола несущего винта, в которой как наряду с газотурбинным двигателем, смонтированным по оси симметрии и сзади пилона, имеющим по бокам последнего воздухозаборники и задний угловой в плане выхлопной патрубок, отклоненный в сторону по направлению вращения несущего винта, противодействуя реактивному моменту последнего при висении, и передний вывод вала для отбора взлетной его мощности, так и наряду с главным редуктором, имеющим по оси симметрии обратную T-образную конфигурацию, снабжена по полету передней и задней входными, но и верхней выходной муфтами сцепления, вращательно связывающими главный редуктор соответственно с электрическим мотор-генератором, расположенным спереди пилона и выполненным обратимым, и газотурбинным двигателем, но и с валом несущего винта, а также представляющая собой систему электропривода, включающую все электромоторы, аккумуляторные перезаряжаемые батареи, преобразователь энергии с блоком управления силовой передачи, подключающим и отключающим электромоторы и газотурбинный двигатель, переключающим генерирующую мощность и порядок подзарядки аккумуляторов от электрического мотор-генератора, который в режиме электрогенератора при полетной конфигурации крылатого автожира обеспечивает поочередно два способа генерации мощности в центральной мотогондоле или от внутреннего, или внешнего источника энергии соответственно от газотурбинного двигателя или авторотирующего несущего винта, при этом как передняя и задняя входные, так и верхняя выходная электромагнитные муфты сцепления, обеспечивающие дистанционное управление их сцеплением/расцеплением как соответствующих входных валов главного редуктора с валом электрического мотор-генератора и газотурбинного двигателя, так и его выходного вала с валом несущего винта, имеющего в случае отказа всех его двигателей возможность аварийной посадки, обеспечиваемой блоком управления, имеющим резервный источник электроэнергии для автоматического расцепления его вала с выходным валом главного редуктора и установки его лопастей в авторотирующее положение с одновременным автоматическим ускоренным отклонением вверх как на угол αкр=+10° консолей крыла, имеющих по всему его размаху максимально отклоненный предкрылок и пилообразную в плане заднюю кромку, так и на угол αкр2=+15° кольцевых каналов с толкающими винтами, в гибридной центральной мотогондоле, обеспечивающей три способа работы газотурбинного двигателя, но и включая один способ в системе генерации мощности для зарядки аккумуляторов при передаче его мощности соответственно с электрическим мотор-генератором, работающим в режиме электромотора, или совместно или поочередно от каждого на вал несущего винта, но и самостоятельной работы при распределенной передаче его мощности и на последний, обеспечивающий в перегрузочном варианте горизонтальный полет в конфигурации винтокрыла, и на электрический мотор-генератор, работающий в режиме электрогенератора.
Благодаря наличию этих признаков в скоростном турбоэлектрическом вертолете обеспечивается возможность преобразования полетной его конфигурации с вертолета трехвинтовой ярусной схемы с нижними и верхним несущими винтами в крылатый автожир, имеющий раздельные движительную систему с толкающими винтами и несущие системы, включающие соответственно несущий винт и крыло малого удлинения, центр давления последнего при поступательном горизонтальном полете расположен вдоль подъемной силы авторотирующего несущего винта с обеспечением сложения соответствующих подъемных сил от этих двух несущих систем, но и обратно. При вертикальном взлете, посадке и висении парирование остаточного реактивного момента, образуемого от несущих винтов различного диаметра, осуществляется с помощью многорежимной аэродинамической системы управления балансировкой по курсу, создающей в горизонтальной плоскости парирующий момент, который уравновешивает реактивный крутящий момент от большего несущего винта. Например, при вращении последнего против часовой стрелки при виде сверху парирование обеспечивается отклонением левого и правого кольцевых каналов с толкающими винтами, размещенных на концах крыла, соответственно назад и вперед по полету, что создает две противоположно направленные аэродинамические силы на концах крыла, образующие парирующий момент, обеспечивающий аэродинамическое путевое управление. Это позволяет наряду с автоматом перекоса лопастей несущего винта улучшить продольно-поперечное, но и, исключая конструкцию струйных рулей продольного и путевого управления, улучшить управление по тангажу и курсу, а также уменьшить длину и массу хвостовой балки, но и достичь на вертолетных режимах полета сверхманевренности, особенно при совместном использовании дифференциального отклонения толкающих винтов в поворотных кольцевых каналах и полного парирования реактивного момента при балансировке по курсу, но и снизить в 1,5-1,7 раза непроизводительные затраты и достичь уровня до 5-7% мощности СУ. В гибридной СУ на крейсерских режимах горизонтального полета в конфигурации крылатого автожира увеличение генерирующей мощности для электропитания, когда падение зарядки литиево-ионной полимерной аккумуляторной батареи снизится до 25% от ее максимума система управления, автоматически отключит выходной муфтой сцепления авторотирующий несущий винт от главного редуктора, обеспечивающего генерацию мощности в центральной мотогондоле от маломощного внешнего источника энергии на электрический мотор-генератор (ЭМГ), и включит газотурбинный двигатель гибридной центральной мотогондолы, который будет вращать обратимый ЭМГ, обеспечивающий подзарядку аккумуляторов в полетной конфигурации крылатого автожира при свободной авторотации несущего винта. При этом 20% мощности гибридной СУ полностью расходуется для привода только толкающих винтов в кольцевых каналах, что позволяет достичь больших крейсерских скоростей полета до 420-450 км/ч. Причем с целью обеспечения в перегрузочном варианте крейсерского режима горизонтального полета в конфигурации винтокрыла возможно в центральной мотогондоле использовать один из трех способов генерации мощности при зарядке аккумуляторных батарей от внутреннего источника энергии - газотурбинного двигателя при самостоятельной его работе и распределенной передаче номинальной его мощности и на несущий винт, обеспечивающий увеличение пропульсивной тяги, и на обратимый ЭМГ. Это также позволяет снизить удельный расход топлива и весьма повысить дальность действия, топливную и экономическую эффективность. Все это позволит достичь весьма малошумной гибридной СУ, имеющей систему электропривода, включающую электромоторы, питаемые от аккумуляторов, преобразователь энергии с блоком управления силовой передачи, подключающим и отключающим электромоторы и газотурбинный двигатель, переключающим генерирующую мощность и порядок подзарядки аккумуляторов, что обеспечит при равномерном распределении зарядки аккумуляторной перезаряжаемой батареи возможность работы электромоторов и особенно газотурбинного двигателя без пиковых перегрузок и при минимальной акустической сигнатуре. Наличие этих признаков позволит при переходных маневрах повысить путевую устойчивость и управляемость по курсу, а также продольную стабильность и поперечную управляемость, но и достичь сверхманевренности.
Предлагаемое изобретение скоростного турбоэлектрического вертолета (СТЭВ) и варианты его использования иллюстрируются общими видами на фиг.1 и 2.
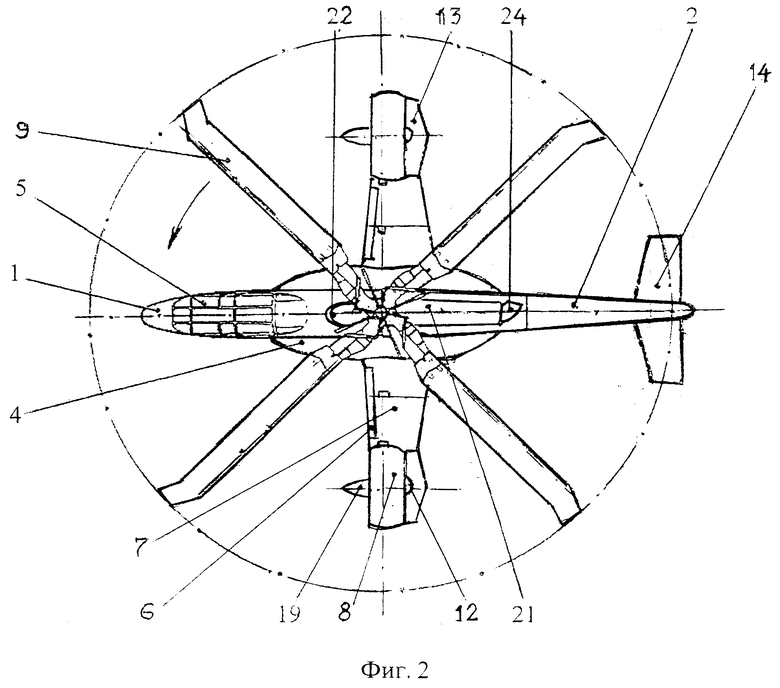
На фиг.1 на общем виде сбоку изображен СТЭВ с трапециевидным крылом малого удлинения, имеющим обтекатели на бортовых выступах и на концах поворотных консолей толкающие винты в поворотных кольцевых каналах, левый и правый из них отклонены соответственно назад и вперед при вертикальном взлете, посадке и висении как вертолета с трехвинтовой ярусной несущей схемой и Y-образным оперением.
На фиг.2 на общем виде сверху изображен СТЭВ в полетной конфигурации крылатого автожира с низкорасположенным крылом, на концах консолей которого установлены толкающие винты в поворотных кольцевых каналах, имеющих на выходе несущие аэродинамические поверхности с V-образной задней кромкой, преобразующей трапециевидное крыло малого удлинения с пилообразной задней кромкой.
Скоростной турбоэлектрический вертолет, представленный на фиг.1 и 2, содержит фюзеляж 1, имеет плавно образованную тонкую хвостовую балку 2 и крыло 3, имеющее положительный угол поперечного V, обтекатели 4 и малое удлинение с наивыгоднейшим профилем, обеспечивающим необходимый и достаточный прирост подъемной силы с крейсерского полета на переходный и взлетно-посадочный режимы. В носовой части фюзеляжа 1 размещена (например, в СТЭВ-штурмовик) двухместная кабина 5 экипажа с отдельными кабинами штурмана-оператора и летчика, сиденья которых расположены уступом. Низкорасположенное трапециевидное крыло 3 оснащено предкрылками 6, автоматически отклоняющимися вниз, в зависимости от скорости и высоты полета. Во время аварийной посадки на режиме авторотации для разгрузки крыла 3 предкрылки 6 отклоняются автоматически на максимальный угол.
Поворотные консоли 7 крыла 3 имеют электромеханический привод, обеспечивающий диапазон поворота крыла на положительные углы атаки (αкр) от 0° до +100°. Кольцевые каналы 8 двухвинтовой системы, смонтированные на концах крыла 3, оснащены соосно узлам поворота консолей 7 последнего независимыми электромеханическими узлами их поворота в вертикальной продольной плоскости относительно соответствующей консоли 7 крыла 3 на угол αкр2=±150º. В трехвинтовой ярусной несущей схеме винты с жестким креплением лопастей и гасителем колебаний как верхний больший несущий винт 9 с автоматом перекоса лопастей смонтирован на выходном валу, проходящему внутри полого вертикального корпуса 11 главного редуктора, выполненного по оси симметрии в виде обратной Т-образной формы, расположен в обтекателе 10, так и нижние меньшие толкающие винты 12 в поворотных кольцевых каналах 8, имеющих на выходе аэродинамические поверхности 13 с V-образной в плане задней кромкой, смонтированные в продолжение средней линии внутрикольцевой части крыла. Стабилизатор 14 имеет положительный угол поперечного V, снабжен под фюзеляжным килем 15, образующим в поперечной плоскости Y-образное хвостовое оперение, смонтированное на конце хвостовой балки 2. Подфюзеляжный киль 15 оснащен в обтекателе законцовки килевой его поверхности амортизационной стойкой заднего колеса 16, образуя трехопорную схему колесного шасси, имеющего главные колеса 17, убирающиеся в обтекатели 4 левого и правого бортового выступа 18. Многорежимная аэродинамическая система управления балансировкой (АСУБ) по курсу, создающая в горизонтальной плоскости парирующий момент, который уравновешивает реактивный крутящий момент от большего несущего винта 9. Поэтому на режимах вертикального взлета/посадки и висения парирование остаточного реактивного момента, образуемого от несущих большего тянущего 9 и меньших толкающих 12 винтов различного диаметра и вращающихся в противоположном направлении, обеспечивается отклонением левого и правого кольцевых каналов 8 с толкающими винтами 12, размещенными на концах крыла 3, соответственно назад и вперед по полету, что создает две противоположно направленные аэродинамические силы на концах крыла, образующие парирующий момент, обеспечивающий аэродинамическое путевое управление (см. фиг.2). Включение АСУБ производится автоматически при повороте консолей 7 крыла 3 на угол более 30°. Имеется согласование совместной работы АСУБ и поворота толкающих винтов 12 в кольцевых каналов 8, включая и дифференциального ускоренного, и совместного с поворотом консолей 7 крыла 3.
Силовая установка выполнена по параллельно-последовательной гибридной технологии силового привода, состоящая из электрических консольных 19 и гибридной центральной мотогондол 20 соответственно с толкающими 12 и несущим 9 винтами. Центральная мотогондола 20 несущего винта 9, в которой наряду с газотурбинным двигателем 21 (ГТД), смонтированным по оси симметрии и сзади пилона 22, оснащен по бокам последнего воздухозаборником 23 и задним угловым в плане выхлопным патрубком 24, отклоненным в сторону по направлению вращения несущего винта 9 и наряду с главным редуктором, выполненным по оси симметрии в виде обратной Т-образной конфигурации, снабжена по полету передней и задней входными, но и верхней выходной муфтами сцепления, вращательно связывающими главный редуктор соответственно с обратимым электрическим мотор-генератором (на фиг.1 и 2 не показаны), расположенным спереди пилона 22 в обтекателе 10, и газотурбинным двигателем 21, но и с валом несущего винта 9. Для улучшения взлетно-посадочных характеристик и уменьшения вибрации от четырехлопастного несущего винта 9 на режиме висения концы его лопастей имеют шумопонижающие стреловидные законцовки, отогнутые вниз и противоположную сторону вращения винта 9, формирующие каждую противолежащую пару в S-образную форму в плане (см. фиг.2).
Управление СТЭВ при различных режимах его полета обеспечивается циклическим (изменяющим направление тяги) и общим (изменяющим силу тяги) шагом несущих винтов соответственно большего тянущего 9 и меньших толкающих 12 винтов с жестким креплением лопастей и гасителем колебаний, а также работой многорежимной АСУБ с синфазным отклонением поворотных консолей 7 крыла 3 и в каждом конечном положении последнего дифференциальным отклонением поворотных кольцевых каналов 8 с аэродинамическими поверхностями 13, расположенными в зоне активного обдува толкающих винтов 12. В полетной конфигурации винтокрыла и крылатого автожира пропульсивная и маршевая тяга обеспечивается соответственно несущим винтом 9 совместно с винтами 12 и только винтами 12, а подъемная сила создается только крылом 3 и несущим винтом 9 совместно с крылом 3 соответственно (см. фиг.2). На режиме вертикального взлета/посадки и висения СТЭВ подъемная сила создается только несущими винтами тянущим 9 и толкающими 12 трехвинтовой ярусной схемы (см. фиг.1), а на режиме перехода - крылом 3 и несущими винтами тянущим 9 и толкающими 12 соответственно большего и меньшего диаметра.
На режимах вертикального взлета/посадки и висения продольно-поперечное управление осуществляется изменением направления и силы тяги несущего винта 9 автоматом перекоса. Поскольку в ярусной трехвинтовой несущей схеме полный момент рысканья My образуется в результате взаимодействия горизонтальных составляющих тяги несущих разновеликих винтов, создающих разворачивающий момент, то образуемый при этом остаточный реактивный момент парируется отклонением левого и правого кольцевых каналов 8 с толкающими винтами 12, размещенными на концах вертикально расположенного крыла 3, соответственно назад и вперед по полету, что создает на его концах две противоположно направленные аэродинамические силы, обеспечивающие аэродинамическое путевое управление. При висении направление полета может осуществляться, как у вертолета ярусной трехвинтовой несущей схемы: поворачиваясь влево-вправо, перемещаясь вверх-вниз, поступательный полет вперед-назад, влево-вправо и в любой комбинации (см. фиг.1). С приближением к поверхности земли или палубы корабля и при полете вблизи них на вертолетных режимах полета четырехлопастные несущие больший 9 и меньшие 12 винты образуют под СТЭВ область уплотненного воздуха, создающего эффект воздушной подушки и тем самым повышающего их КПД. Для соответствующей его посадки на поверхность земли или палубы корабля используются колеса задней вспомогательной 16 и главных 17 опор, убирающиеся только последними из них в обтекатели 4 бортовых выступов 18.
При полете СТЭВ с коротким взлетом и посадкой при его максимальном взлетном весе может осуществляться, как у комбинированного вертолета, т.е. винтокрыла. В этом случае его толкающие винты 12 в кольцевых каналах 8 поворачиваются вверх на угол 25-30°, а несущий винт 9, изменяя угол установки тарелки автомата перекоса, наклоняет плоскость вращения несущего винта 9, вследствие чего формируется движущая сила, создающая маршевую тягу и подъемную силу, большую подъемной силы, обеспечиваемой крылом 3. При этом 40% мощности гибридной СУ полностью расходуется для привода несущего 9 и толкающих винтов 12. Это позволит увеличить полезную нагрузку в 1,6 раза и скорость крейсерского полета, так как при высоких скоростях полетная комбинация крыло 3 - толкающие винты 12 гораздо выгоднее для создания подъемной силы и маршевой тяги, чем одним несущим винтом 9. После набора высоты горизонтальный полет СТЭВ при максимальной полезной нагрузке может осуществляться так же, как у крылатого автожира. В этом случае толкающие винты 12 устанавливаются горизонтально и обеспечивают маршевую тягу, а несущий винт 9 отключается от привода двигателей СУ и начинает авторотировать, создавая только подъемную силу наравне с подъемной силой, обеспечиваемой крылом 3. Кроме того, при авторотации срыв потока на лопастях несущего винта отодвигается на более высокие скорости полета, что позволит получить скорости полета 440 км/ч.
Таким образом СТЭВ, выполненный по концепции ярусного расположения несущих винтов (ЯРНВ) в подъемно-маршевой и подъемно-несущей системах соответственно по схеме 2+1, обеспечивающих возможность преобразования его полетной конфигурации, представляет собой комбинированный скоростной электровертолет с многорежимной АСУБ путевого управления. Выбор такой аэродинамической схемы обусловлен простотой и возможностью преобразования его полетной конфигурации с вертолета ярусной трехвинтовой несущей схемы с разновеликими несущими винтами в полетную конфигурацию как винтокрыла, так и крылатого автожира, но и обратно. При этом несущий больший винт в конфигурации вертолета и винтокрыла предназначен для создания подъемной и пропульсивной силы, поступательное же движение в горизонтальной плоскости увеличивается и винтами в поворотных кольцевых каналах. На вертолетных режимах полета такая трехвинтовая несущая схема с АСУБ и толкающими винтами в поворотных кольцевых каналах, обеспечивающими дополнительную подъемную силу, позволяет достичь при ВВП непроизводительных затрат до 5-7% мощности СУ, увеличить почти на 12% взлетный вес и полезную нагрузку.
Поэтому дальнейшие исследования по созданию беспилотных и скоростных турбоэлектрических вертолетов исполнения ЯРНВ-Х2+1, обеспечивающих возможность выполнения технологии ВВП, КВП и КВВП при различном их базировании, используя вышеназванные преимущества, позволят освоить широкое их семейство.
Наиболее актуальным в современных условиях для этих целей может являться освоение легкого СТЭВ с взлетным весом 2500 и 2920 кг и для перевозки 5 и 8 человек с дальностью полета до 1334 и 2058 км соответственно при выполнении ВВП и КВП. Гибридная СУ суммарной пиковой/номинальной мощностью 640/352 кВт в СТЭВ исполнения ЯРНВ-Х2+1, включающая два электромотора (каждый пиковой мощностью по 155кВт) и один обратимый ЭМГ, имеет генераторный ГТД модели RR300, который может предоставить еще 220кВт (300 л.с). При благоприятных погодных условиях литиевая батарея весом 590 кг позволит улететь на расстояние в 315 км при крейсерской скорости 420 км/ч и времени висения 0,5 ч. Однако при падении зарядки до 25% от максимального значения включится ГТД и будет в полете подпитывать аккумуляторы. Топливный его бак при выполнении ВВП вмещает 200 кг топлива, что эквивалентно дополнительным 1029 км от общей дальности полета 1344 км.
В конечном итоге широкие эксплуатационные требования к комбинированным вертолетам нового поколения, несомненно, приведут к созданию и освоению СТЭВ, позволяющих не только реализовать реально высокие технико-экономические результаты, но и достойно конкурировать на внешнем рынке с компанией «Sikorsky» (США) и фирмой "Agusta Westland" (Италия), производящими аналогичные вертолеты и БЭКП.
| название | год | авторы | номер документа |
|---|---|---|---|
| СКОРОСТНОЙ СВЕРХМАНЕВРЕННЫЙ ВИНТОКРЫЛ | 2012 |
|
RU2480379C1 |
| МНОГОВИНТОВОЙ БЕСПИЛОТНЫЙ ВИНТОКРЫЛ | 2016 |
|
RU2611480C1 |
| МНОГОВИНТОВОЙ ПРЕОБРАЗУЕМЫЙ БЕСПИЛОТНЫЙ ВЕРТОЛЕТ | 2014 |
|
RU2550909C1 |
| МНОГОВИНТОВОЙ ПРЕОБРАЗУЕМЫЙ СКОРОСТНОЙ ВЕРТОЛЕТ | 2014 |
|
RU2548304C1 |
| МНОГОВИНТОВОЙ КОНВЕРТИРУЕМЫЙ СКОРОСТНОЙ ВЕРТОЛЕТ | 2014 |
|
RU2568517C1 |
| СКОРОСТНОЙ КОМБИНИРОВАННЫЙ ВИНТОКРЫЛ | 2016 |
|
RU2610326C1 |
| БЕСПИЛОТНЫЙ ТЯЖЕЛЫЙ ЭЛЕКТРОКОНВЕРТОПЛАН | 2013 |
|
RU2532672C1 |
| МНОГОВИНТОВОЙ ТЯЖЕЛЫЙ КОНВЕРТОВИНТОКРЫЛ | 2013 |
|
RU2521121C1 |
| ЛЕГКИЙ КОНВЕРТИРУЕМЫЙ СКОРОСТНОЙ ВЕРТОЛЕТ | 2015 |
|
RU2579235C1 |
| АВИАТРАНСФОРМЕР, ПРЕОБРАЗУЕМЫЙ В АВТОМОБИЛЬ | 2016 |
|
RU2650257C1 |
Изобретение относится к области авиационной техники, в частности к конструкциям беспилотных вертолетов. Скоростной турбоэлектрический вертолет содержит трехвинтовую ярусную схему с двумя винтами в кольцевых каналах на поворотных консолях крыла и над ними на пилоне несущий винт, газотурбинные двигатели, передающие крутящий момент через главный редуктор и валы трансмиссии на несущий и тянущие винты в кольцевых каналах, газовые струйные рули путевого и продольного управления. Вертолет снабжен возможностью преобразования полетной конфигурации с вертолета трехвинтовой несущей схемы с разновеликими несущими винтами в одновинтовой с несущим винтом большего и толкающими винтами меньшего диаметра и в крылатый автожир, имеющий раздельные движительную систему с толкающими винтами и несущие системы, включающие соответственно несущий винт и низкорасположенное крыло малого удлинения с пилообразной задней кромкой. Консоли крыла могут поворачиваться на угол от 0º до 100º, а кольцевые каналы, смонтированные на концах крыла, имеют возможность поворота относительно соответствующей консоли крыла на угол αкр=±15°. Силовая установка выполнена по параллельно-последовательной гибридной технологии силового привода. Достигается уменьшение потребной мощности на путевую балансировку при висении и улучшение путевой и продольной управляемости. 2 ил.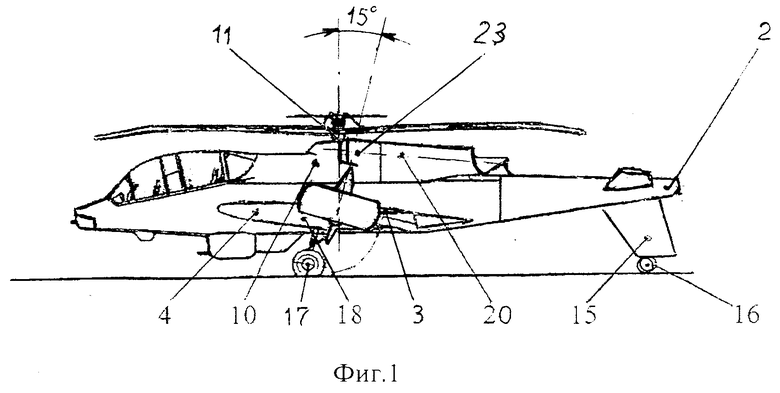
Скоростной турбоэлектрический вертолет, содержащий трехвинтовую ярусную схему с двумя винтами в кольцевых каналах на поворотных консолях крыла и над ними на пилоне несущий винт, имеет газотурбинные двигатели и систему трансмиссии, включающую основные и центральный редукторы с валами, вращающими несущий и тянущие винты в кольцевых каналах, и на конце хвостовой балки за стабилизатором газовые струйные рули путевого и продольного управления, трехопорную схему колесного шасси с главными колесами, убираемыми в обтекатели бортовых выступов, отличающийся тем, что он наряду с ярусным расположением движительно-несущих одновинтовой и двухвинтовой систем, последняя из которых оснащена толкающими винтами, имеющими одинаковое направление вращения между собой и противоположное с несущим винтом, выполнен как по технологии многорежимной аэродинамической системы управления балансировкой по тангажу и курсу, так и снабжен возможностью преобразования его полетной конфигурации наряду с вертолета трехвинтовой несущей схемы с разновеликими несущими винтами, имеющего в одновинтовой и двухвинтовой системах соответственно несущий винт большего и толкающие винты меньшего диаметра, в полетную конфигурацию крылатого автожира, имеющего раздельные движительную систему с толкающими винтами и несущие системы, включающие соответственно несущий винт и низкорасположенное трапециевидное крыло малого удлинения, центр давления последнего при поступательном горизонтальном полете расположен вдоль подъемной силы авторотирующего несущего винта с обеспечением сложения соответствующих подъемных сил от двух несущих систем, но и обратно; поворотные консоли крыла, имеющие электромеханический привод, обеспечивающий диапазон поворота крыла на положительные углы атаки (αкр) от 0° до +100°, снабжены возможностью синфазного ускоренного их синхронного отклонения с толкающими винтами в кольцевых каналах от вертикально расположенного крыла назад и вперед по полету на угол αкр=+10° и αкр=-10° соответственно от +90° до +100° и от +90° до +80° как для управления по тангажу при висении, так и возможности зависания на месте при попутном и встречном ветре соответственно, кольцевые каналы, смонтированные на концах крыла, оснащены соосно узлам поворота консолей последнего независимыми электромеханическими узлами их поворота в вертикальной продольной плоскости относительно соответствующей консоли крыла на угол αкр2=±15°, снабжены в каждом конечном положении поворота консолей крыла возможностью дифференциального, но и синфазного ускоренного отклонения кольцевых каналов с толкающими винтами на соответствующие углы атаки (αкр2) от их линий вертикальной и горизонтальной тяги соответственно вперед-назад и вверх-вниз для сверхманевренного управления по курсу с компенсацией реактивного момента от работы несущего винта и поперечного управления соответственно при вертикальном взлете/посадке, висении и горизонтальном полете, но и вверх при коротком взлете/посадке, причем после его полета в конфигурации крылатого автожира с горизонтально расположенным крылом и в случае отказа узлов его поворота парирование реактивного момента от работы несущего винта при висении создается дифференциальным изменением горизонтальной или силы, или направления тяги реверсивных толкающих винтов, силовая установка, выполненная по параллельно-последовательной гибридной технологии силового привода, состоящая из электрических консольных и центральной мотогондол соответственно с толкающими и несущим винтами, первые две из которых, имея равные между собой и их суммарную меньшую вертикальные тяги толкающих винтов, обеспечивающих при пиковой мощности соответствующих электромоторов меньшую подъемную силу, составляющую 1/3 от взлетного веса в сравнении с подъемной силой несущего винта, снабжены левым и правым электромоторами, выполненными с возможностью их работы при различных углах отклонения в вертикальной продольной плоскости и вращательно связанными с толкающими винтами, смонтированы в соответствующих мотогондолах, вынесенных с толкающими винтами за заднюю кромку внутрикольцевой части крыла соответствующих кольцевых каналов, имеющих на их выходе развитые несущие аэродинамические поверхности с V-образной в плане задней кромкой, смонтированные вдоль средней линии внутрикольцевой части крыла, а центральная мотогондола несущего винта, в которой как наряду с газотурбинным двигателем, смонтированным по оси симметрии и сзади пилона, имеющим по бокам последнего воздухозаборники и задний угловой в плане выхлопной патрубок, отклоненный в сторону по направлению вращения несущего винта, противодействуя реактивному моменту последнего при висении, и передний вывод вала для отбора взлетной его мощности, так и наряду с главным редуктором, имеющим по оси симметрии обратную Т-образную конфигурацию, снабжена по полету передней и задней входными, но и верхней выходной муфтами сцепления, вращательно связывающими главный редуктор соответственно с электрическим мотор-генератором, расположенным спереди пилона и выполненным обратимым, и газотурбинным двигателем, но и с валом несущего винта, а также представляющая собой систему электропривода, включающую все электромоторы, аккумуляторные перезаряжаемые батареи, преобразователь энергии с блоком управления силовой передачи, подключающим и отключающим электромоторы и газотурбинный двигатель, переключающим генерирующую мощность и порядок подзарядки аккумуляторов от электрического мотор-генератора, который в режиме электрогенератора при полетной конфигурации крылатого автожира обеспечивает поочередно два способа генерации мощности в центральной мотогондоле или от внутреннего, или внешнего источника энергии соответственно от газотурбинного двигателя или авторотирующего несущего винта, при этом как передняя и задняя входные, так и верхняя выходная электромагнитные муфты сцепления, обеспечивающие дистанционное управление их сцеплением/расцеплением как соответствующих входных валов главного редуктора с валом электрического мотор-генератора и газотурбинного двигателя, так и его выходного вала с валом несущего винта, имеющего в случае отказа всех его двигателей возможность аварийной посадки, обеспечиваемой блоком управления, имеющим резервный источник электроэнергии для автоматического расцепления его вала с выходным валом главного редуктора и установки его лопастей в авторотирующее положение с одновременным автоматическим ускоренным отклонением вверх как на угол αкр=+10° консолей крыла, имеющих по всему его размаху максимально отклоненный предкрылок и пилообразную в плане заднюю кромку, так и на угол αкр=+15° кольцевых каналов с толкающими винтами, в гибридной центральной мотогондоле, обеспечивающей три способа работы газотурбинного двигателя, но и включая один способ в системе генерации мощности для зарядки аккумуляторов при передаче его мощности соответственно с электрическим мотор-генератором, работающим в режиме электромотора, или совместно или поочередно от каждого на вал несущего винта, но и самостоятельной работы при распределенной передаче его мощности и на последний, обеспечивающий в перегрузочном варианте горизонтальный полет в конфигурации винтокрыла, и на электрический мотор-генератор, работающий в режиме электрогенератора.
| ВЕРТОЛЕТ-САМОЛЕТ-АМФИБИЯ | 2005 |
|
RU2310583C2 |
| US 20070215750 A1, 20.09.2007 | |||
| МНОГОЦЕЛЕВОЙ ГИДРОКОНВЕРТОВИНТОПЛАН | 2007 |
|
RU2351506C2 |
| US 8052094 B2, 08.11.2011 | |||

