ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
[0001] Настоящее изобретение относится к способу содействия движению и устройству содействия движению.
УРОВЕНЬ ТЕХНИКИ ИЗОБРЕТЕНИЯ
[0002] В последние годы исследовалась система, которая обнаруживает состояние препятствия, которое может присутствовать на маршруте движения задействуемого транспортного средства, и содействует движению задействуемого транспортного средства согласно состоянию препятствия. В JP 2017-140993 A раскрыт способ управления задействуемым транспортным средством, когда пешеходный переход, пересекающий маршрут движения, присутствует в пункте назначения поворота в случае, когда задействуемое транспортное средство поворачивает через встречную полосу движения на перекрестке.
[0003] В соответствии со способом, раскрытым в JP 2017-140993 A, при обнаружении пешехода, идущего по пешеходному переходу, управление положением остановки задействуемого транспортного средства осуществляется в соответствии с расстоянием от перекрестка до пешеходного перехода. В частности, когда расстояние от перекрестка до пешеходного перехода меньше, чем вся длина задействуемого транспортного средства, задействуемое транспортное средство останавливается без поворота. С другой стороны, когда расстояние от перекрестка до пешеходного перехода больше, чем вся длина задействуемого транспортного средства, задействуемое транспортное средство останавливается перед пешеходным переходом после поворота. Посредством такого управления можно избежать приближения к пешеходу или встречному транспортному средству, которые могут присутствовать на маршруте движения задействуемого транспортного средства.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0004] В соответствии со способом, раскрытым в JP 2017-140993 A, можно предотвратить приближение задействуемого транспортного средства к препятствию, такому как пешеход или встречное транспортное средство, которые могут существовать на маршруте движения задействуемого транспортного средства. Однако в случае, когда задействуемое транспортное средство выполняет изменение полосы движения и т.п., даже другое транспортное средство (например, встречное транспортное средство), движущееся вне маршрута движения задействуемого транспортного средства, может быть обращено к задействуемому транспортному средству и приблизиться к нему спереди задействуемого транспортного средства.
[0005] Задача настоящего изобретения состоит в том, чтобы предоставить способ содействия изменению полосы движения и устройство содействия изменению полосы движения, способные исключать приближение другого транспортного средства, движущегося вне маршрута движения задействуемого транспортного средства, к задействуемому транспортному средству в состоянии нахождения обращенным к задействуемому транспортному средству спереди задействуемого транспортного средства.
[0006] В соответствии с одним аспектом изобретения предоставлен способ содействия движению для выполнения изменения полосы движения задействуемого транспортного средства с использованием определенного маршрута и скорости транспортного средства. Способ содействия движению включает в себя: обнаружение встречного транспортного средства, движущегося по встречной полосе движения, встречной по отношению к полосе движения, по которой движется задействуемое транспортное средство, когда задействуемое транспортное средство начинает изменение полосы движения; определение точки пересечения между виртуальным маршрутом продвижения и линейным маршрутом продвижения, по которому встречное транспортное средство продвигается линейно, при этом виртуальный маршрут продвижения отличается от маршрута и является виртуальным продолжением маршрута продвижения задействуемого транспортного средства в направлении продвижения в течение периода от начала до конца изменения полосы движения; осуществление изменения полосы движения с использованием маршрута и скорости транспортного средства в случае, когда разность по времени между первым прогнозируемым временем, когда предполагается, что задействуемое транспортное средство достигает точки пересечения, и вторым прогнозируемым временем, пока встречное транспортное средство не достигнет точки пересечения, находится вне предварительно определенного диапазона; и когда разность по времени находится внутри предварительно определенного диапазона, осуществление изменения полосы движения посредством изменения по меньшей мере одного из маршрута и скорости транспортного средства таким образом, чтобы разность по времени находилась вне предварительно определенного диапазона.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0007] Фиг.1 представляет собой принципиальную схему конфигурации устройства содействия движению, общего для вариантов осуществления.
Фиг.2 представляет собой схему, показывающую обстановку вокруг задействуемого транспортного средства в случае, когда определенный маршрут и скорость транспортного средства (информация управления вождением) изменяются при управлении содействием движению согласно первому варианту осуществления.
Фиг.3 представляет собой блок-схему последовательности операций, показывающую управление содействием движению.
Фиг.4А представляет собой пояснительную схему примера изменения скорости транспортного средства.
Фиг.4В представляет собой пояснительную схему примера изменения маршрута.
Фиг.4С представляет собой пояснительную схему примера изменения маршрута.
Фиг.5A представляет собой пояснительную схему примера изменения скорости транспортного средства.
Фиг.5B представляет собой пояснительную схему примера изменения маршрута.
Фиг.6 представляет собой блок-схему последовательности операций, показывающую управление содействием движению в соответствии с модификацией.
Фиг.7 представляет собой схему, показывающую обстановку вокруг задействуемого транспортного средства в случае, когда маршрут и/или скорость транспортного средства изменяются при управлении содействием движению согласно второму варианту осуществления.
Фиг.8 представляет собой блок-схему последовательности операций, показывающую управление содействием движению.
Фиг.9 представляет собой пояснительную схему встречного транспортного средства, используемого для определения необходимости изменения маршрута и/или скорости транспортного средства в третьем варианте осуществления.
Фиг.10 представляет собой пояснительную схему встречного транспортного средства, используемого для определения необходимости изменения маршрута и/или скорости транспортного средства.
Фиг.11 представляет собой пояснительную схему примера, в котором присутствует разделительная полоса.
Фиг.12 представляет собой схему, показывающую обстановку вокруг задействуемого транспортного средства в случае, когда маршрут и/или скорость транспортного средства изменяются при управлении содействием движению согласно четвертому варианту осуществления.
Фиг.13 представляет собой схему, показывающую обстановку вокруг задействуемого транспортного средства в случае изменения маршрута и/или скорости транспортного средства.
ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
[0008] Далее варианты осуществления настоящего изобретения будут описаны со ссылкой на чертежи и т.п.
[0009] (Первый вариант осуществления)
Фиг.1 представляет собой принципиальную схему конфигурации устройства 100 содействия вождению, общего для вариантов осуществления настоящего изобретения.
[0010] Как показано на Фиг.1, устройство 100 содействия вождению включает в себя камеру 110, приемник 120 GPS, датчик 130, интерфейс 140 связи, базу 150 данных карт, указатель 160 направления (поворота), исполнительный механизм 170 и контроллер 180. Устройство 100 содействия вождению установлено, например, на транспортном средстве (задействуемом транспортном средстве А), имеющем функцию автономного вождения или функцию содействия вождению.
[0011] Камера 110 представляет собой устройство формирования изображений, которое формирует изображение внешней обстановки задействуемого транспортного средства А и получает информацию формирования изображений о внешней обстановке задействуемого транспортного средства А. Камера 110 представляет собой, например, камеры монитора кругового обзора, выполненные на внешних сторонах транспортного средства на передней, задней и левой и правой дверях задействуемого транспортного средства А, переднюю камеру, выполненную на внешней или внутренней стороне ветрового стекла транспортного средства, и заднюю камеру, выполненную на задней части задействуемого транспортного средства А. Камера 110 выводит информацию формирования изображений внешней обстановки в контроллер 180.
[0012] Приемник 120 GPS периодически принимает сигнал (данные GPS), передаваемый со спутника GPS. Приемник 120 GPS выводит принятые данные GPS в контроллер 180.
[0013] Датчик 130 включает в себя радар 131, гироскопический датчик 132, датчик 133 скорости транспортного средства и т.п. и обнаруживает состояние движения задействуемого транспортного средства А. Радар 131 обнаруживает объект вне задействуемого транспортного средства А с использованием радиоволн. Радиоволны представляют собой, например, миллиметровые волны, и радар 131 передает радиоволны в окрестности задействуемого транспортного средства А и принимает радиоволны, отраженные объектом, для обнаружения объекта. Радар 131 может получать, например, расстояние или направление до окружающего объекта в качестве информации об объекте. Гироскопический датчик 132 обнаруживает направление задействуемого транспортного средства А. Датчик 133 скорости транспортного средства обнаруживает скорость задействуемого транспортного средства А. Датчик 130 выводит полученную информацию об объекте, а также обнаруженные направление и скорость задействуемого транспортного средства А в контроллер 180.
[0014] Интерфейс 140 связи получает информацию об окружающей обстановке задействуемого транспортного средства A извне посредством беспроводной связи. Интерфейс 140 связи принимает различные типы информации от интеллектуальной транспортной системы (ITS), которая передает, например, информацию о дорожном движении, такую как информация о дорожных заторах и правилах дорожного движения, информацию о погоде и т.п. в режиме реального времени. ITS включает в себя связь между транспортными средствами и другим транспортным средством, связь между "транспортное средство - дорога" и придорожным устройством и т.п. Интерфейс 140 связи получает ускорение и замедление другого транспортного средства вокруг задействуемого транспортного средства А, относительное положение по отношению к задействуемому транспортному средству А и т.п., например, посредством связи между транспортными средствами.
[0015] База 150 данных карт хранит картографическую информацию. Картографическая информация включает в себя информацию о форме, уклоне, ширине, ограничении скорости, перекрестке, светофоре, количестве полос движения и т.п. дороги, включая кривизну кривой и т.п. К картографической информации, хранящейся в базе 150 данных карт, может обращаться контроллер 180 в любое время, что будет описано ниже.
[0016] Указатель 160 направления задействуется и останавливается действием водителя или командой от контроллера 180. Информация о задействовании и остановке указателя поворота 160 выводится в контроллер 180.
[0017] Исполнительный механизм 170 представляет собой устройство, которое осуществляет управление движением задействуемого транспортного средства А на основе команды от контроллера 180. Исполнительный механизм 170 включает в себя исполнительный механизм 171 привода, исполнительный механизм 172 тормоза, исполнительный механизм 173 рулевого управления и т.п.
[0018] Исполнительный механизм 171 привода представляет собой устройство для регулировки движущей силы задействуемого транспортного средства A.
[0019] Когда задействуемое транспортное средство А представляет собой транспортное средство с двигателем внутреннего сгорания, оснащенное двигателем в качестве приводным источником движения, исполнительный механизм 171 привода включает в себя исполнительный механизм дроссельной заслонки, который регулирует количество воздуха, подаваемого в двигатель (открытие дроссельной заслонки), и клапан впрыска топлива, который регулирует количество топлива, подаваемого в двигатель (количество впрыска топлива).
[0020] Когда задействуемое транспортное средство A представляет собой гибридное транспортное средство или электрическое транспортное средство, оснащенное мотором в качестве приводного источника движения, исполнительный механизм 171 привода включает в себя схему (инвертор, преобразователь и т.п.), способную регулировать электрическую мощность, подаваемую к мотору.
[0021] Исполнительный механизм 172 тормоза представляет собой устройство, которое задействует тормозную систему в ответ на команду от контроллера 180 и регулирует тормозное усилие, прикладываемое к колесам задействуемого транспортного средства А. Исполнительный механизм 172 тормоза включает в себя гидравлический тормоз или рекуперативный тормоз.
[0022] Исполнительный механизм 173 рулевого управления включает в себя вспомогательный мотор, который управляет крутящим моментом рулевого управления в системе рулевого управления с электроусилителем и т.п. Контроллер 180 управляет работой исполнительного механизма 173 рулевого управления для управления работой колес, тем самым способствуя изменению полосы движения задействуемого транспортного средства A.
[0023] Контроллер 180 состоит из компьютера, включающего в себя центральный блок управления (CPU), постоянное запоминающее устройство (ROM), запоминающее устройство с произвольным доступом (RAM) и интерфейс ввода/вывода (интерфейс I/O). Контроллер 180 выполняет обработку для реализации конкретного управления посредством исполнения конкретной программы. Контроллер 180 может включать в себя один компьютер или множество компьютеров.
[0024] Контроллер 180 генерирует информацию управления вождением, указывающую маршрут движения (включая временной режим рулевого управления), скорость движущегося транспортного средства (включая ускорение и замедление) и т.п., и содействует движению задействуемого транспортного средства А в соответствии с маршрутом и скоростью транспортного средства, указанными сгенерированной информацией управления вождением. Когда изменение полосы движения включено в маршрут движения, контроллер 180 изменяет маршрут и скорость транспортного средства в информации управления вождением в соответствии с обстановкой вокруг задействуемого транспортного средства А и содействует движению задействуемого транспортного средства А в соответствии с измененной информацией управления вождением.
[0025] Фиг.2 представляет собой схему, показывающую пример, в котором маршрут и скорость транспортного средства, указанные информацией управления вождением, изменяются, когда изменение полосы движения выполняется в состоянии, когда выполняется управление содействием движению. На фигуре показана четырехполосная дорога с двумя полосами движения с каждой стороны, и предполагается, что движение по левой стороне предписано законом.
[0026] В двух полосах движения на нижней стороне фигуры задействуемое транспортное средство А движется от правой стороны в левую сторону фигуры. Две полосы движения на верхней стороне фигуры являются встречными полосами движения, встречными по отношению к полосе движения задействуемого транспортного средства А, и встречное транспортное средство B движется от левой стороны в правую сторону фигуры по встречным полосам движения. На фигуре положение задействуемого транспортного средства А в каждый из трех моментов времени от t1 до t3 указано с помощью A1 до A3, а положение встречного транспортного средства B в каждый из трех моментов времени с t1 по t3 указано с помощью B1 до B3.
[0027] До момента времени t1 задействуемое транспортное средство А движется по внешней полосе движения, которая не соприкасается с встречной полосой движения среди полос движения из двух полос движения. Предполагается, что препятствие C находится на внутренней полосе движения, соприкасающейся с встречной полосой движения. Препятствием С является, например, строительная площадка или остановившееся из-за поломки транспортное средство.
[0028] В момент времени t1 задействуемое транспортное средство А достигает стороны препятствия С, а в момент времени t2 задействуемое транспортное средство А проезжает сторону препятствия С и начинает изменение полосы движения на внутреннюю полосу движения. Затем, в момент времени t3, задействуемое транспортное средство А начинает движение по внутренней полосе движения и завершает изменение полосы движения, а после момента времени t3 задействуемое транспортное средство А движется по внутренней полосе движения.
[0029] Предполагается, что встречное транспортное средство B движется по встречной внутренней полосе движения, которая соприкасается с полосой движения задействуемого транспортного средства А, и встречное транспортное средство B не выполняет изменение полосы движения. На фигуре показаны встречные транспортные средства от B1 до B3 в моменты времени от t1 до t3.
[0030] На фигуре маршрут движения задействуемого транспортного средства А указан толстой сплошной линией, и маршрут движения включает в себя траекторию движения в течение изменения полосы движения (с момента t2 до момента t3). Маршрут движения, прогнозируемый для встречного транспортного средства В, указан тонкой сплошной линией.
[0031] Виртуальный маршрут продвижения пересекается с прогнозируемым маршрутом движения встречного транспортного средства B в точке X пересечения, причем виртуальный маршрут продвижения отличается от маршрута и является виртуальным продолжением маршрута продвижения задействуемого транспортного средства в направлении продвижения в течение изменения полосы движения (в любое время с момента времени t2, когда начинается изменение полосы движения, до момента времени t3, когда изменение полосы движения заканчивается) задействуемого транспортного средства А, обозначенный пунктирной линией. Это означает, что задействуемое транспортное средство A и встречное транспортное средство B продвигаются к точке X пересечения, обращенными друг к другу, и приближаются друг к другу. То есть, поскольку задействуемое транспортное средство A и встречное транспортное средство B движутся к точке X пересечения, хотя маршруты движения не пересекаются друг с другом, оба транспортных средства приближаются друг к другу спереди. В такой ситуации водитель задействуемого транспортного средства А выполняет операцию рулевого управления, чтобы избежать приближения встречного транспортного средства В спереди, и в результате управление содействием вождению может быть прервано.
[0032] Следовательно, когда и задействуемое транспортное средство A, и встречное транспортное средство B, движутся к точке X пересечения, контроллер 180 изменяет информацию управления вождением задействуемого транспортного средства A и выполняет содействие движению задействуемого транспортного средства A в соответствии с измененной информацией управления вождением. Соответственно, задействуемое транспортное средство A и встречное транспортное средство B не движутся к точке X пересечения, обращенными друг к другу в течение изменения полосы движения, и можно исключить приближение обоих транспортных средств спереди.
[0033] Обращаясь снова к Фиг.1, контроллер 180, который выполняет такое управление, включает в себя блок 181 обнаружения положения задействуемого транспортного средства, блок 182 генерирования маршрута движения, блок 183 получения информации об окружающих транспортных средствах, блок 184 определения необходимости изменения и блок 185 содействия изменению полосы движения. Далее эти конфигурации будут описаны подробно.
[0034] Блок 181 обнаружения положения задействуемого транспортного средства постоянно обнаруживает текущее положение, скорость транспортного средства и направление движения задействуемого транспортного средства A на основе данных GPS от приемника 120 GPS и направления и скорости транспортного средства задействуемого транспортного средства A, обнаруживаемых датчиком 130. Блок 181 обнаружения положения задействуемого транспортного средства обнаруживает положение задействуемого транспортного средства A на карте со ссылкой на базу 150 данных карт.
[0035] Блок 181 обнаружения положения задействуемого транспортного средства получает информацию о дороге вокруг задействуемого транспортного средства А на основе обнаруженного текущего положения, скорости транспортного средства, направления движения и положения на карте задействуемого транспортного средства А, информацию формирования изображения о внешней обстановке, полученную камерой 110, и информацию об объекте, полученную датчиком 130. Информация о дороге включает в себя информацию о форме, уклоне, ширине, ограничении скорости, перекрестке, светофоре, типе полосы движения, количестве полос движения и т.п. дороги вокруг задействуемого транспортного средства А.
[0036] Блок 182 генерирования маршрута движения генерирует маршрут движения задействуемого транспортного средства А на основе информации, такой как положение или состояние окружающей дороги задействуемого транспортного средства А, обнаруженные блоком 181 обнаружения положения задействуемого транспортного средства, и установленного пункта назначения. На маршруте движения показано положение движения в направлении ширины транспортного средства на дороге. Кроме того, блок 182 генерирования маршрута движения генерирует информацию о скорости (включая ускорение и замедление, временной режим рулевого управления и т.п.) в случае, когда задействуемое транспортное средство А движется по маршруту движения.
[0037] Таким образом, блок 182 генерирования маршрута движения генерирует информацию управления вождением, включающую в себя маршрут движения и информацию о скорости. В примере, показанном на Фиг.2, информация управления вождением, указывающая маршрут движения (включая временной режим рулевого управления) и скорость движения (включая ускорение и замедление), генерируется таким образом, чтобы избежать препятствия C на обочине дороги и изменить полосу движения на внутреннюю полосу движения после проезда стороны препятствия C.
[0038] Блок 183 получения информации об окружающих транспортных средствах получает информацию об окружающих транспортных средствах на основе информации формирования изображения о внешней обстановке, полученной камерой 110, информации об объекте, полученной датчиком 130, и окружающей обстановки задействуемого транспортного средства А, полученной посредством интерфейса 140 связи. Информация об окружающих транспортных средствах включает в себя обстановку движения другого транспортного средства, включающего в себя встречное транспортное средство, движущееся по встречной полосе движения, встречной по отношению к задействуемому транспортному средству А.
[0039] Блок 184 определения необходимости изменения определяет, необходимо ли изменить информацию управления вождением в соответствии с обстановкой вокруг задействуемого транспортного средства A. В частности, как показано на Фиг.2, блок 184 определения необходимости изменения получает точку X пересечения между виртуальным маршрутом продвижения задействуемого транспортного средства А и прогнозируемым линейным маршрутом продвижения встречного транспортного средства B в момент времени t2, когда задействуемое транспортное средство А начинает изменение полосы движения. Кроме того, получаются время ta виртуального прибытия, которое прогнозируется как требуемое задействуемому транспортному средству A для виртуального достижения точки X пересечения, и время tb прогнозируемого прибытия, пока встречное транспортное средство B не достигнет точки X пересечения, и определяется, необходимо ли изменить информацию управления вождением в зависимости от того, находится ли разность td по времени между двумя транспортными средствами внутри предварительно определенного диапазона. Подробности обработки определения, выполняемой блоком 184 определения необходимости изменения, будут описаны позже со ссылкой на Фиг.4.
[0040] Блок 185 содействия изменению полосы движения выполняет содействие движению, включающее в себя изменение полосы движения задействуемого транспортного средства А. Когда блок 184 определения необходимости изменения определяет, что необходимо изменить информацию управления вождением, блок 185 содействия изменению полосы движения изменяет информацию управления вождением и выполняет содействие движению задействуемого транспортного средства А на основе маршрута и скорости транспортного средства, указанных измененной информацией управления вождением.
[0041] Фиг.3 представляет собой блок-схему последовательности операций управления содействием движению, выполняемого контроллером 180. Управление содействием движению многократно выполняется с предварительно определенным циклом. Управление содействием движению может выполняться посредством исполнения программы, хранящейся в контроллере 180.
[0042] На этапе S1 контроллер 180 (блок 182 генерирования маршрута движения) генерирует приблизительный маршрут движения и информацию о скорости задействуемого транспортного средства A на основе такой информации, как положение задействуемого транспортного средства A, обнаруженное по блоку 181 обнаружения положения задействуемого транспортного средства, установленный пункт назначения и т.п.
[0043] На этапе S2 контроллер 180 (блок 182 генерирования маршрута движения) определяет, следует ли начинать изменение полосы движения после предварительно определенного времени (например, через 3 секунды) с использованием маршрута движения, вычисленного на этапе S1. В примере на Фиг.2, в момент времени t1 определяется, что изменение полосы движения выполняется после предварительно определенного времени, и изменение полосы движения начинается в момент времени t2.
[0044] Когда определено, что изменение полосы движения начинается после предварительно определенного времени (S2: Да), то затем выполняется обработка этапа S3. Когда не определено, что изменение полосы движения выполняется после предварительно определенного времени (S2: Нет), то затем, при обработке этапа S9, управление содействием движению выполняется таким образом, что транспортное средство движется по определенному маршруту движения с определенной скоростью или ускорением.
[0045] На этапе S3 контроллер 180 (блок 182 генерирования маршрута движения) управляет указателем 160 направления, чтобы уведомить окружающие транспортные средства о том, что необходимо осуществлять изменение полосы движения.
[0046] На этапе S4 контроллер 180 (блок 182 генерирования маршрута движения) создает информацию управления вождением, указывающую траекторию движения, информацию о скорости и т.п., когда выполняется изменение полосы движения. В примере на Фиг.2, генерируются маршрут движения, по которому транспортное средство движется по внешней полосе движения перед препятствием C и меняет полосу движения на внутреннюю полосу движения после проезда стороны препятствия C, и информация о скорости, согласно которой транспортное средство ускоряется и замедляется без значительной тряски на маршруте движения.
[0047] На этапе S5 контроллер 180 (блок 183 получения информации об окружающих транспортных средствах) получает состояние окружающей обстановки задействуемого транспортного средства A и обнаруживает присутствие или отсутствие встречного транспортного средства B, обращенного к маршруту движения задействуемого транспортного средства A, после изменения полосы движения. Когда встречное транспортное средство B присутствует, контроллер 180 дополнительно прогнозирует маршрут движения встречного транспортного средства B.
[0048] Когда встречное транспортное средство B присутствует (S5: Да), то затем выполняется обработка этапа S6, и вычисляется точка X пересечения, используемая для определения необходимости изменения информации управления вождением. Когда встречного транспортного средства B нет (S5: Нет), то затем выполняется обработка этапа S9, и содействие движению выполняется таким образом, что изменение полосы движения выполняется в соответствии с маршрутом и скоростью, указанными в информации управления вождением, сгенерированной на этапе S4.
[0049] На этапе S6 контроллер 180 (блок 184 определения необходимости изменения) получает точку X пересечения, используемую для определения необходимости изменения информации управления вождением на последующем этапе S7. В частности, контроллер 180 получает виртуальный маршрут продвижения, который является виртуальным продолжением маршрута продвижения задействуемого транспортного средства вперед в направлении продвижения в течение изменения полосы движения, и получает точку X пересечения между виртуальным маршрутом продвижения и прогнозируемым маршрутом движения встречного транспортного средства B, полученного на этапе S5.
[0050] На этапе S7 контроллер 180 (блок 184 определения необходимости изменения) получает время ta виртуального прибытия (первое прогнозируемое время), пока задействуемое транспортное средство A виртуально не достигнет точки X пересечения, и время tb прогнозируемого прибытия (второе прогнозируемое время, пока встречное транспортное средство B не достигнет точки X пересечения, и определяет, необходимо ли изменить информацию содействия вождению в соответствии с тем, находится ли разность td по времени между временем ta виртуального прибытия и временем tb прогнозируемого прибытия в предварительно определенном диапазоне.
[0051] В частности, как показано на Фиг.2, контроллер 180 получает время ta виртуального прибытия, пока задействуемое транспортное средство A не достигнет точки X пересечения в случае, когда предполагается, что задействуемое транспортное средство A продвигается линейно по виртуальному маршруту продвижения без завершения изменения полосы движения. В то же время контроллер 180 прогнозирует время tb прогнозируемого прибытия, пока встречное транспортное средство B не достигнет точки X пересечения.
[0052] Кроме того, контроллер 180 получает разность td по времени между временем ta виртуального прибытия и временем tb прогнозируемого прибытия и определяет, необходимо ли исправление в соответствии с тем, находится ли разность td по времени внутри предварительно определенного диапазона (например, 1 секунда). Когда разность td по времени находится внутри предварительно определенного диапазона, контроллер 180 определяет, что задействуемое транспортное средство А и встречное транспортное средство B могут продвигаться к точке X пересечения, обращенными друг к другу, в одно и то же время. В таком случае, поскольку водитель задействуемого транспортного средства А вручную управляет транспортным средством, чтобы избежать движения впереди встречного транспортного средства В, и обработка управления вождением, вероятно, будет прервана, определяется, что исправление информации управления вождением является необходимым.
[0053] Таким образом, когда разность td по времени находится внутри предварительно определенного диапазона, определяется, что необходимо исправление информации управления вождением (S7: Да), и затем выполняется обработка этапа S8. Когда разность td по времени находится вне предварительно определенного диапазона, определяется, что исправление информации управления вождением не требуется (S7: Нет), и затем выполняется обработка этапа S9.
[0054] На этапе S8 контроллер 180 (блок 185 содействия изменению полосы движения) изменяет маршрут и скорость, указанные в информации управления вождением задействуемого транспортного средства А. Из-за такого изменения информации управления вождением по меньшей мере одно из точки X пересечения, времени ta виртуального прибытия и времени tb прогнозируемого прибытия изменяется, и разность td по времени оказывается вне предварительно определенного диапазона. В результате, поскольку исключается продвижение задействуемого транспортного средства А и встречного транспортного средства В к точке X пересечения, находясь обращенными друг к другу в одно и то же время, можно уменьшить вероятность того, что водитель задействуемого транспортного средства А вручную выполнит управление, и обработка управления движением прервется. Конкретный пример модификации информации управления вождением будет описан позже со ссылкой на Фиг.4А-4С, 5А и 5В.
[0055] На этапе S9 контроллер 180 (блок 185 содействия изменению полосы движения) содействует изменению полосы движения задействуемого транспортного средства A в соответствии с информацией управления вождением. Когда информация управления вождением изменяется на этапе S8, содействие движению выполняется на основе измененной информации управления вождением. Соответственно, разность td по времени находится вне предварительно определенного диапазона, и можно исключить прерывание обработки управления вождением из-за действия водителя задействуемого транспортного средства А и нестабильность поведения задействуемого транспортного средства А.
[0056] Примеры случая, когда информация управления вождением изменяется на этапе S8, показаны на Фиг.4А-4С и Фиг.5А и 5В. Фиг.4A-4C показывают примеры, в которых информация управления вождением изменяется, когда разность td по времени находится внутри предварительно определенного диапазона, и определено, что изменение необходимо (S7: Да) и когда время ta виртуального прибытия задействуемого транспортного средства A больше (позже), чем время tb прогнозируемого прибытия встречного транспортного средства B. Фиг.5A и 5B показывают примеры, в которых информация управления вождением изменяется, когда разность td по времени находится внутри предварительно определенного диапазона, и определено, что необходимо исправление (S7: Да) и когда время ta виртуального прибытия короче (ранее), чем время tb прогнозируемого прибытия.
[0057] В примере на Фиг.4А, контроллер 180 (блок 185 содействия изменению полосы движения) изменяет информацию о скорости (информацию управления вождением) таким образом, что скорость задействуемого транспортного средства А становится меньше, чем скорость, которая уже была установлена до начала изменения полосы движения без изменение маршрута движения. Из-за такого изменения время t2', когда изменение полосы движения начинается в соответствии с информацией управления вождением после изменения, является более поздним, чем время t2, когда изменение полосы движения начинается в соответствии с информацией управления движением до исправления. На фигуре показаны положения задействуемого транспортного средства A и встречного транспортного средства B, соответствующие моментам времени t1, t2 и t2'. Положение A2 задействуемого транспортного средства A в момент времени t2 до исправления опущено для удобочитаемости.
[0058] Поскольку время t2' начала изменения полосы движения задерживается за счет замедления задействуемого транспортного средства А перед началом изменения полосы движения, время ta виртуального прибытия, пока задействуемое транспортное средство А виртуально не достигнет точки X пересечения, становится больше. Время ta виртуального прибытия, превышающее время tb прогнозируемого прибытия, становится еще больше, и, таким образом, разность td по времени оказывается вне предварительно определенного диапазона. Как показано на фигуре, положение B2' встречного транспортного средства B расположено перед точкой X пересечения в момент времени t2', когда задействуемое транспортное средство A начинает изменение полосы движения, и задействуемое транспортное средство A продвигается к задней части встречного транспортного средства B, и, таким образом, исключается то, что задействуемое транспортное средство A и встречное транспортное средство B движутся таким образом, чтобы приблизиться друг к другу, обращенными друг к другу.
[0059] В примере на Фиг.4В, контроллер 180 (блок 185 содействия изменению полосы движения) изменяет маршрут движения (информацию управления вождением) в течение изменения полосы движения таким образом, что угол рулевого управления задействуемого транспортного средства А в течение изменения полосы движения меньше, чем угол, который уже был установлен. Из-за такого изменения время t2 начала изменения полосы движения задействуемого транспортного средства А не изменяется, и поэтому нет необходимости рассматривать время t2' начала изменения полосы движения после изменения, как в примере, показанном на Фиг.4А. На фигуре положения A1 и A2 задействуемого транспортного средства A и положения B1 и B2 встречного транспортного средства B показаны в соответствии с моментами времени t1 и t2 соответственно. Что касается виртуального маршрута продвижения задействуемого транспортного средства А, то виртуальный маршрут продвижения до исправления обозначен пунктирной линией, а виртуальный маршрут продвижения после исправления обозначен прерывистой линией.
[0060] Как показано на фигуре, за счет уменьшения угла рулевого управления рулевого колеса по сравнению с тем, который был до изменения, точка X пересечения изменяется на переднюю сторону в направлении продвижения задействуемого транспортного средства A, и, таким образом, время ta виртуального прибытия, пока задействуемое транспортное средство A виртуально достигнет точки X пересечения, становится короче. Кроме того, поскольку расстояние между встречным транспортным средством B и точкой X пересечения увеличивается, время tb прогнозируемого прибытия в точку X пересечения встречного транспортного средства B становится больше. В результате время ta виртуального прибытия, превышающее время tb прогнозируемого прибытия, становится еще больше, время tb прогнозируемого прибытия, меньшее времени ta виртуального прибытия, становится еще короче, и, в то же время, время tb прогнозируемого прибытия, большее, чем время ta виртуального прибытия, становится еще больше, и, таким образом, разность td по времени оказывается вне предварительно определенного диапазона. Как показано на фигуре, положение B2' встречного транспортного средства B расположена перед точкой X пересечения в момент времени t2', когда задействуемое транспортное средство A начинает изменение полосы движения, и задействуемое транспортное средство A продвигается к задней части встречного транспортного средства B, и, таким образом, исключается то, что задействуемое транспортное средство A и встречное транспортное средство B движутся таким образом, чтобы приблизиться друг к другу, обращенными друг к другу.
[0061] В примере на Фиг.4С, контроллер 180 (блок 185 содействия изменению полосы движения) изменяет маршрут движения (информацию управления вождением) в течение изменения полосы движения таким образом, что начальное положение при изменении полосы движения находится на передней стороне в направлении продвижения задействуемого транспортного средства A относительно положения, которое уже было установлено. Из-за такого изменения время t2', когда изменение полосы движения начинается в соответствии с информацией управления вождением после изменения, является более поздним времени t2, когда изменение полосы движения начинается в соответствии с информацией управления движением до исправления. На фигуре показаны положения задействуемого транспортного средства A и встречного транспортного средства B, соответствующие моментам времени t1, t2 и t2'. Положение A2 задействуемого транспортного средства A в момент времени t2 до исправления опущено для удобочитаемости.
[0062] Поскольку точка X пересечения изменяется на переднюю сторону в направлении продвижения посредством изменения начального положения изменения полосы движения на переднюю сторону в направлении продвижения задействуемого транспортного средства А, время ta виртуального прибытия, пока задействуемое транспортное средство виртуально не достигнет точки пересечения X, становится больше. Кроме того, поскольку расстояние между встречным транспортным средством B и точкой X пересечения уменьшается, время tb прогнозируемого прибытия в точку X пересечения встречного транспортного средства B становится короче. В результате время ta виртуального прибытия, превышающее время tb прогнозируемого прибытия, становится еще больше, и, в то же время, время tb прогнозируемого прибытия, меньшее времени ta виртуального прибытия, становится еще короче, и, таким образом, разность td по времени оказывается вне предварительно определенного диапазона. Как показано на фигуре, положение B2' встречного транспортного средства B расположено на передней стороне точки X пересечения в момент времени t2', когда задействуемое транспортное средство A начинает изменение полосы движения, и задействуемое транспортное средство A продвигается к задней части встречного транспортного средства B, и, таким образом, исключается то, что задействуемое транспортное средство A и встречное транспортное средство B движутся таким образом, чтобы приблизиться друг к другу, обращенными друг к другу.
[0063] В примере на Фиг.5A, контроллер 180 (блок 185 содействия изменению полосы движения) изменяет информацию о скорости (информацию управления вождением) так, чтобы скорость задействуемого транспортного средства A была выше, чем скорость, которая уже была установлена до начала изменения полосы движения без изменения маршрута движения. Из-за такого изменения время t2', когда изменение полосы движения начинается в соответствии с информацией управления вождением после изменения, является более ранним, чем время t2, когда начинается изменение полосы движения в соответствии с информацией управления вождением до исправления. На фигуре положения задействуемого транспортного средства A и встречного транспортного средства B показаны соответствующими моментам времени t1, t2' и t2, соответственно. Положение A2 задействуемого транспортного средства A в момент времени t2 до исправления опущено для удобочитаемости.
[0064] Поскольку время t2' начала изменения полосы движения становится более ранним за счет ускорения задействуемого транспортного средства А до начала изменения полосы движения, время ta виртуального прибытия к точке X пересечения задействуемого транспортного средства А становится короче. Таким образом, время ta виртуального прибытия, меньшее, чем время tb прогнозируемого прибытия, становится еще больше, и, таким образом, разность td по времени оказывается вне предварительно определенного диапазона. Как показано на фигуре, положение B2' встречного транспортного средства B расположено позади точки X пересечения в момент времени t2', когда задействуемое транспортное средство A начинает изменение полосы движения, и задействуемое транспортное средство A продвигается к передней части встречного транспортного средства B, и, таким образом, исключается движение задействуемого транспортного средства A и встречного транспортного средства B таким образом, чтобы приблизиться друг к другу, обращенными друг к другу.
[0065] В примере на Фиг.5В, контроллер 180 (блок 185 содействия изменению полосы движения) изменяет маршрут движения (информацию управления вождением) в течение изменения полосы движения таким образом, что угол рулевого управления задействуемого транспортного средства А в течение изменения полосы движения больше, чем угол, который уже был установлен. Из-за такого изменения время t2 начала изменения полосы движения задействуемого транспортного средства А не изменяется, и поэтому нет необходимости рассматривать время t2' начала изменения полосы движения после изменения, как в примере, показанном на Фиг.5А. Подобно Фиг.4В показаны положения А1 и А2 задействуемого транспортного средства А и положения В1 и В2 встречного транспортного средства В, соответствующие моментам времени t1 и t2 соответственно. Что касается виртуального маршрута продвижения, который является виртуальным продолжением маршрута продвижения задействуемого транспортного средства в направлении продвижения в течение изменения полосы движения задействуемого транспортного средства А, то виртуальный маршрут продвижения до исправления указан пунктирной линией, а виртуальный маршрут продвижения после исправления показан прерывистой линией.
[0066] Как показано на фигуре, за счет увеличения угла рулевого управления по сравнению с тем, который был до изменения, точка X пересечения изменяется на ближнюю сторону в направлении продвижения задействуемого транспортного средства A, и, таким образом, время ta виртуального прибытия, пока задействуемое транспортное средство A виртуально не достигнет точки X пересечения, становится короче. Кроме того, поскольку расстояние между встречным транспортным средством B и точкой X пересечения увеличивается, время tb прогнозируемого прибытия в точку X пересечения встречного транспортного средства B становится больше. В результате время ta виртуального прибытия, меньшее времени tb прогнозируемого прибытия, становится еще короче, и, в то же время, время tb прогнозируемого прибытия, превышающее время ta виртуального прибытия, становится еще больше, и, таким образом, разность td по времени оказывается вне предварительно определенного диапазона. Как показано на фигуре, положение B2' встречного транспортного средства B расположено позади точки X пересечения в момент времени t2', когда задействуемое транспортное средство A начинает изменение полосы движения, и задействуемое транспортное средство A продвигается к задней части встречного транспортного средства B, и, таким образом, исключается движение задействуемого транспортного средства A и встречного транспортного средства B таким образом, чтобы приблизиться друг к другу, обращенными друг к другу.
[0067] Определение точки X пересечения (S6) и вычисление разности по времени между временем ta виртуального прибытия и временем tb прогнозируемого прибытия (S7) могут выполняться во множество моментов времени с момента t2, когда изменение полосы движения начинается, до момента времени t3, когда изменение полосы движения заканчивается. Соответственно, в течение изменения полосы движения от начала до конца изменения полосы движения можно исключить движение задействуемого транспортного средства А и встречного транспортного средства В, чтобы они приближались друг к другу, обращенными друг к другу.
[0068] В настоящем варианте осуществления, как показано на Фиг.4A-5B, используется пример, в котором изменяются установленный маршрут и скорость задействуемого транспортного средства A, но настоящее изобретение не ограничивается этим. Разность по времени может находиться вне предварительно определенного диапазона за счет изменения как пути, так и скорости вместо изменения пути и скорости.
[0069] В соответствии с первым вариантом осуществления могут быть получены следующие полезные эффекты.
[0070] Согласно способу содействия движению согласно первому варианту осуществления, контроллер 180 определяет точку X пересечения между прогнозируемым маршрутом движения встречного транспортного средства B и виртуальным маршрутом продвижения задействуемого транспортного средства A в течение изменения полосы движения (S6). Кроме того, получаются время ta виртуального прибытия, пока задействуемое транспортное средство A виртуально не достигнет точки X пересечения, и время tb прогнозируемого прибытия, пока встречное транспортное средство B не достигнет точки X пересечения, и определяется, необходимо ли изменить информацию управления вождением, в соответствии с тем, находится ли разность td по времени между временем ta виртуального прибытия и временем tb прогнозируемого прибытия внутри предварительно определенного диапазона (S7).
[0071] Когда разность td по времени находится внутри предварительно определенного диапазона, существует вероятность того, что задействуемое транспортное средство А и встречное транспортное средство B продвинутся к точке X пересечения, обращенными друг к другу, в одно и то же время. Следовательно, контроллер 180 изменяет информацию управления вождением таким образом, что разность td по времени оказывается вне предварительно определенного диапазона (S8), и выполняет содействие вождению задействуемого транспортного средства А на основе измененной информации управления вождением (S9).
[0072] Здесь, когда встречное транспортное средство B приближается к задействуемому транспортному средству A, обращенными друг к другу, водителю задействуемого транспортного средства A не предпочтительна такая ситуация, и существует вероятность того, что водитель задействуемого транспортного средства A выполнит операцию вождения, чтобы предотвратить движение обоих транспортных средств, обращенными друг к другу. Однако, поскольку разность td по времени находится вне предварительно определенного диапазона посредством исправления информации управления вождением, описанной выше, исключается приближение задействуемого транспортного средства А и встречного транспортного средства В друг к другу, когда они обращены друг к другу. В результате исключается переход поведения задействуемого транспортного средства А в неустойчивую точку, вызванную выполнением водителем операции в течение содействия вождению, и, таким образом, становится возможным улучшить стабильность управления содействием вождению.
[0073] Согласно способу содействия движению согласно первому варианту осуществления, как показано на Фиг.4A, когда разность td по времени находится внутри предварительно определенного диапазона и определено, что исправление необходимо (S7: Да), контроллер 180 (блок 185 содействия изменению полосы движения) изменяет информацию о скорости (информацию управления вождением), чтобы замедлить задействуемое транспортное средство А перед началом изменения полосы движения.
[0074] Поскольку время t2' начала изменения полосы движения задерживается за счет замедления задействуемого транспортного средства А перед началом изменения полосы движения, время ta виртуального прибытия становится больше. Таким образом, время ta виртуального прибытия становится больше, и, таким образом, разность td по времени оказывается вне предварительно определенного диапазона. Из-за такого изменения в момент t2', когда задействуемое транспортное средство A начинает изменение полосы движения, встречное транспортное средство B расположено дальше вперед, и, таким образом, исключается приближение задействуемого транспортного средства A и встречного транспортного средства B друг к другу, когда они обращены друг к другу.
[0075] Из-за такого изменения время ta виртуального прибытия, большее, чем время tb прогнозируемого прибытия, становится еще больше, когда разность времени td находится внутри предварительно определенного диапазона, и определяется, что необходимо исправление (S7: Да) и когда время ta виртуального прибытия задействуемого транспортного средства A больше (позже), чем время tb прогнозируемого прибытия встречного транспортного средства B. В результате в момент t2', когда задействуемое транспортное средство A начинает изменение полосы движения, встречное транспортное средство B расположено дальше вперед, и, таким образом, маршрут движения задействуемого транспортного средства A становится маршрутом движения к задней части встречного транспортного средства B, и исключается приближение задействуемого транспортного средства A и встречного транспортного средства B друг с другом, в то время как они обращены друг к другу.
[0076] Как показано на Фиг.4B, когда разность td по времени находится внутри предварительно определенного диапазона и определено, что необходимо исправление (S7: Да), контроллер 180 (блок 185 содействия изменению полосы движения) изменяет маршрут движения (информацию управления вождением) в течение изменения полосы движения таким образом, что угол рулевого управления задействуемого транспортного средства А в течение изменения полосы движения становится меньше.
[0077] За счет уменьшения угла рулевого управления точка X пересечения изменяется в переднюю сторону в направлении продвижения задействуемого транспортного средства A, и, таким образом, время ta виртуального прибытия становится больше. Кроме того, поскольку расстояние между встречным транспортным средством B и точкой X пересечения уменьшается, время tb прогнозируемого прибытия становится короче. Из-за такого изменения время ta виртуального прибытия становится больше, и, в то же время, время tb прогнозируемого прибытия становится короче, и, таким образом, разность td по времени оказывается вне предварительно определенного диапазона. Из-за такого изменения в момент t2, когда задействуемое транспортное средство A начинает изменение полосы движения, точка X пересечения расположена дальше назад, а встречное транспортное средство B расположено дальше вперед, и, таким образом, исключается приближение задействуемого транспортного средства A и встречного транспортного средства B друг к другу, обращенными друг к другу.
[0078] Когда разность td по времени находится внутри предварительно определенного диапазона и определено, что необходимо исправление (S7: Да), и когда время ta виртуального прибытия задействуемого транспортного средства A больше (позднее), чем время tb прогнозируемого прибытия встречного транспортного средства B, то из-за такого изменения время ta виртуального прибытия, большее, чем время tb прогнозируемого прибытия, становится еще больше, и, в то же время, время tb прогнозируемого прибытия, меньшее, чем время ta виртуального прибытия, становится еще короче, и, таким образом, виртуальное время прибытия, большее, чем время tb прогнозируемого прибытия, становится еще больше. В результате в момент t2', когда задействуемое транспортное средство А начинает изменение полосы движения, точка X пересечения находится дальше назад, а встречное транспортное средство B находится дальше вперед, и, таким образом, маршрут движения задействуемого транспортного средства А становится маршрутом движения к задней части встречного транспортного средства B, и исключается приближение задействуемого транспортного средства A и встречного транспортного средства B друг к другу, обращенными друг к другу.
[0079] Как показано на Фиг.4C, когда разность td по времени находится внутри предварительно определенного диапазона и определено, что необходимо исправление (S7: Да), контроллер 180 (блок 185 содействия изменению полосы движения) изменяет маршрут движения (информацию управления вождением) в течение изменения полосы движения таким образом, что начальное положение при изменении полосы движения находится на передней стороне в направлении продвижения задействуемого транспортного средства. А.
[0080] Посредством изменения начального положения изменения полосы движения на переднюю сторону точка X пересечения изменяется на переднюю сторону, и, таким образом, время ta виртуального прибытия становится больше. Кроме того, поскольку расстояние между встречным транспортным средством B и точкой X пересечения уменьшается, время tb прогнозируемого прибытия становится короче. Таким образом, время ta виртуального прибытия становится больше, и, в то же время, время tb прогнозируемого прибытия становится короче, и, таким образом, разность td по времени оказывается вне предварительно определенного диапазона. Из-за такого изменения в момент t2', когда задействуемое транспортное средство A начинает изменение полосы движения, точка X пересечения расположена дальше назад, и встречное транспортное средство B расположено дальше вперед, и, таким образом, исключается приближение задействуемого транспортного средства A и встречного транспортного средства B друг к другу, обращенными друг к другу.
[0081] Когда разность td по времени находится внутри предварительно определенного диапазона и определено, что необходимо исправление (S7: Да), и когда время ta виртуального прибытия задействуемого транспортного средства A больше (позднее), чем время tb прогнозируемого прибытия встречного транспортного средства B, то из-за такого изменения время ta виртуального прибытия, большее, чем время tb прогнозируемого прибытия, становится еще больше, и, в то же время, время tb прогнозируемого прибытия, меньшее, чем время ta виртуального прибытия, становится еще короче, и, таким образом, разность td по времени оказывается вне предварительно определенного диапазона. В результате точка X пересечения расположена дальше назад, а встречное транспортное средство B расположено дальше вперед, и, таким образом, маршрут движения задействуемого транспортного средства A становится маршрутом движения к задней части встречного транспортного средства B и исключается приближение задействуемого транспортного средства A и встречного транспортного средства B друг к другу, обращенными друг к другу.
[0082] Как показано на Фиг.5A, когда разность td по времени находится внутри предварительно определенного диапазона и определено, что необходимо исправление (S7: Да), контроллер 180 (блок 185 содействия изменению полосы движения) изменяет информацию о скорости (информацию управления вождением), чтобы ускорить задействуемое транспортное средство А перед началом изменения полосы движения.
[0083] Поскольку время t2' начала изменения полосы движения становится более ранним за счет ускорения задействуемого транспортного средства А перед началом изменения полосы движения, время ta виртуального прибытия становится короче. Таким образом, время ta виртуального прибытия становится короче, и, таким образом, разность td по времени оказывается вне предварительно определенного диапазона. Из-за такого изменения в момент t2', когда задействуемое транспортное средство A начинает изменение полосы движения, встречное транспортное средство B находится дальше назад, и, таким образом, исключается приближение задействуемого транспортного средства A и встречного транспортного средства B друг к другу, обращенными друг к другу.
[0084] Когда разность td по времени находится внутри предварительно определенного диапазона и определено, что необходимо исправление (S7: Да), и когда время ta виртуального прибытия задействуемого транспортного средства A короче (ранее), чем время tb прогнозируемого прибытия встречного транспортного средства B, время ta виртуального прибытия, меньшее времени tb прогнозируемого прибытия, становится еще меньше из-за такого изменения, и, таким образом, разность td по времени оказывается вне предварительно определенного диапазона. В результате, в момент времени t2', когда задействуемое транспортное средство А начинает изменение полосы движения, встречное транспортное средство B расположено дальше назад, и, таким образом, маршрут движения задействуемого транспортного средства А становится маршрутом движения к передней части встречного транспортного средства В, и исключается приближение задействуемого транспортного средства A и встречного транспортного средства B друг к другу, обращенными друг к другу.
[0085] Как показано на Фиг.5B, когда разность td по времени находится внутри предварительно определенного диапазона и определено, что необходимо исправление (S7: Да), контроллер 180 (блок 185 содействия изменению полосы движения) изменяет маршрут движения (информацию управления вождением) в течение изменения полосы движения таким образом, что угол рулевого управления задействуемого транспортного средства А в течение изменения полосы движения становится больше.
[0086] Посредством увеличения угла рулевого управления точка X пересечения изменяется на ближнюю сторону в направлении продвижения задействуемого транспортного средства A, и, таким образом, время ta виртуального прибытия к точке X пересечения задействуемого транспортного средства A становится короче. Кроме того, поскольку расстояние между встречным транспортным средством B и точкой X пересечения увеличивается, время tb прогнозируемого прибытия в точку X пересечения встречного транспортного средства B становится больше. Следовательно, время ta виртуального прибытия становится короче, и, в то же время, время tb прогнозируемого прибытия становится больше, и, таким образом, разность td по времени оказывается вне предварительно определенного диапазона. Из-за такого изменения в момент t2', когда задействуемое транспортное средство A начинает изменение полосы движения, точка X пересечения расположена дальше вперед, а встречное транспортное средство B расположено дальше назад, и, таким образом, исключается приближение задействуемого транспортного средства A и встречного транспортного средства B друг к другу, обращенными друг к другу.
[0087] Когда разность td по времени находится внутри предварительно определенного диапазона и определено, что необходимо исправление (S7: Да), и когда время ta виртуального прибытия задействуемого транспортного средства A короче (ранее), чем время tb прогнозируемого прибытия встречного транспортного средства B, то из-за такого изменения время ta виртуального прибытия, меньшее времени tb прогнозируемого прибытия, становится еще короче, и, в то же время, время tb прогнозируемого прибытия, большее, чем время ta виртуального прибытия, становится еще больше, и, таким образом, разность td по времени оказывается вне предварительно определенного диапазона. В результате, в момент времени t2', когда задействуемое транспортное средство А начинает изменение полосы движения, точка X пересечения расположена дальше вперед, а встречное транспортное средство B расположено дальше назад, и, таким образом, маршрут движения задействуемого транспортного средства А становится маршрутом движения к передней части встречного транспортного средства B, и исключается приближение задействуемого транспортного средства A и встречного транспортного средства B друг к другу, обращенными друг к другу.
[0088] Хотя это не показано, когда разность td по времени находится внутри предварительно определенного диапазона и определено, что необходимо исправление (S7: Да), контроллер 180 (блок 185 содействия изменению полосы движения) может изменить информацию управления вождением таким образом, чтобы начальное положение при изменении полосы движения находилось позади задействуемого транспортного средства A.
[0089] Поскольку точка X пересечения изменяется на заднюю сторону посредством изменения начального положения изменения полосы движения на заднюю сторону задействуемого транспортного средства A, время ta виртуального прибытия к точке X пересечения задействуемого транспортного средства A становится короче. Кроме того, поскольку расстояние между встречным транспортным средством B и точкой X пересечения увеличивается, время tb прогнозируемого прибытия в точку X пересечения встречного транспортного средства B становится больше. Следовательно, время ta виртуального прибытия становится короче, и в то же время большое время tb прогнозируемого прибытия становится еще больше, и, таким образом, разность td по времени оказывается вне предварительно определенного диапазона. В результате в момент t2', когда задействуемое транспортное средство A начинает изменение полосы движения, точка X пересечения расположена дальше вперед, и встречное транспортное средство B расположено дальше назад, и, таким образом, исключается приближение задействуемого транспортного средства A и встречного транспортного средства B друг к другу, обращенными друг к другу.
[0090] Когда разность td по времени находится внутри предварительно определенного диапазона и определено, что необходимо исправление (S7: Да), и когда время ta виртуального прибытия задействуемого транспортного средства A короче (ранее), чем время tb прогнозируемого прибытия встречного транспортного средства B, то из-за такого изменения время ta виртуального прибытия, меньшее времени tb прогнозируемого прибытия, становится еще короче, и, в то же время, время tb прогнозируемого прибытия, большее, чем время ta виртуального прибытия, становится еще больше, и, таким образом, разность td по времени оказывается вне предварительно определенного диапазона. В результате, в момент времени t2', когда задействуемое транспортное средство А начинает изменение полосы движения, точка X пересечения расположена дальше вперед, а встречное транспортное средство B расположено дальше назад, и, таким образом, маршрут движения задействуемого транспортного средства А становится маршрутом движения к передней части встречного транспортного средства B, и исключается приближение задействуемого транспортного средства A и встречного транспортного средства B друг к другу, обращенными друг к другу.
[0091] (Модификация)
В первом варианте осуществления контроллер 180 изменяет маршрут и скорость, указанные информацией управления движением, как показано на Фиг.4A-4C, 5A и 5B, в зависимости от того, находится ли разность td по времени между временем ta виртуального прибытия и временем tb прогнозируемого прибытия внутри предварительно определенного диапазона.
[0092] Здесь, как описано выше, на Фиг.4A-4C показаны примеры, в которых информация управления вождением изменяется, когда разность td по времени находится внутри предварительно определенного диапазона, и определено, что необходимо исправление (S7: Да) и когда время ta виртуального прибытия задействуемого транспортного средства A больше (позже), чем время tb прогнозируемого прибытия встречного транспортного средства B. Фиг.5A и 5B показывают примеры, в которых информация управления вождением изменяется, когда разность td по времени находится внутри предварительно определенного диапазона, и определено, что необходимо исправление (S7: Да) и когда время ta виртуального прибытия короче (ранее), чем время tb прогнозируемого прибытия.
[0093] Таким образом, изменение (первое изменение), показанное на Фиг.4A-4C, и изменение (второе изменение), показанное на Фиг.5A и 5B, могут переключаться в соответствии с отношением величины между временем ta виртуального прибытия и временем tb прогнозируемого прибытия.
[0094] Фиг.6 представляет собой блок-схему последовательности способа управления содействием движению в соответствии с настоящей модификацией. Согласно блок-схеме, по сравнению с управлением содействия движению первого варианта осуществления, показанного на Фиг.2, обработка определения на этапе S71 предоставляется после этапа S7, и изменение этапа S81 или этапа S82 выборочно выполняется в соответствии с обработкой определения на этапе S71.
[0095] На этапе S71 контроллер 180 (блок 184 определения необходимости изменения) определяет, больше ли время ta виртуального прибытия, чем время tb прогнозируемого прибытия.
[0096] Когда время ta виртуального прибытия больше времени tb прогнозируемого прибытия (S71: Да), как показано на Фиг.4A-4C, то затем выполняется обработка изменения на этапе S81, так что задействуемое транспортное средство A движется к задней части встречного транспортного средства B. На этапе S81 информация управления вождением изменяется таким образом, что маршрут движения задействуемого транспортного средства A становится маршрутом движения к задней части встречного транспортного средства B.
[0097] С другой стороны, когда время ta виртуального прибытия короче времени tb прогнозируемого прибытия (S71: Нет), как показано на Фиг.5A и 5B, то затем выполняется обработка изменения на этапе S82, так что задействуемое транспортное средство A движется к передней части встречного транспортного средства B. На этапе S82 информация управления вождением изменяется таким образом, что маршрут движения задействуемого транспортного средства A становится маршрутом движения к передней части встречного транспортного средства B.
[0098] Согласно способу содействия движению в такой модификации, когда разность td по времени между временем tx виртуального прибытия и временем tb прогнозируемого прибытия находится внутри предварительно определенного диапазона (S7: Да), и время ta виртуального прибытия больше времени tb прогнозируемого прибытия (S71: Да), информация управления вождением, показанная на Фиг.4A-4C, изменяется таким образом, что задействуемое транспортное средство A движется к задней части встречного транспортного средства B (S81). Таким образом, исключается приближение задействуемого транспортного средства A и встречного транспортного средства B друг к другу, обращенными друг к другу, а исключается переход поведения задействуемого транспортного средства А в неустойчивую точку, вызванную выполнением водителем операции в течение содействия вождению, и, таким образом, можно улучшить стабильность управления содействием вождению.
[0099] Когда разность td по времени между временем tx виртуального прибытия и временем tb прогнозируемого прибытия находится внутри предварительно определенного диапазона (S7: Да), и время ta виртуального прибытия короче времени tb прогнозируемого прибытия (S71: Нет), информация управления вождением, показанная на Фиг.5A и 5B изменяется таким образом, что задействуемое транспортное средство A движется к передней части встречного транспортного средства B (S82). Таким образом, исключается приближение задействуемого транспортного средства A и встречного транспортного средства B друг к другу, обращенными друг к другу, и исключается переход поведения задействуемого транспортного средства А в неустойчивую точку, вызванную выполнением водителем операции в течение содействия вождению, и, таким образом, можно улучшить стабильность управления содействием вождению.
[0100] (Второй вариант осуществления)
В первом варианте осуществления контроллер 180 прогнозирует время ta виртуального прибытия (первое время) в точку X пересечения и время tb прогнозируемого прибытия (второе время), пока встречное транспортное средство B не достигнет точки X пересечения, и определяет, необходимо ли изменить информацию управления вождением, в зависимости от того, находится ли разность td по времени между временем ta виртуального прибытия (первое время) и временем tb прогнозируемого прибытия (второе время) внутри предварительно определенного диапазона, но настоящее изобретение не ограничено этим. Во втором варианте осуществления будет описан пример, в котором контроллер 180 устанавливает область Y пересечения вблизи точки X пересечения и определяет, необходимо ли изменение, в зависимости от того, находится ли разность td по времени внутри предварительно определенного диапазона или встречное транспортное средство B присутствует внутри области Y пересечения в время ta виртуального прибытия.
[0101] В частности, как показано на Фиг.7, контроллер 180 устанавливает область Y пересечения, имеющую предварительно определенную длину области в направлении вперед-назад вдоль направления маршрута продвижения встречного транспортного средства В с точкой X пересечения в качестве центра. Контроллер 180 получает время tx виртуального прибытия в случае, когда предполагается, что задействуемое транспортное средство А продвигается линейно по виртуальному маршруту продвижения и достигает точки X пересечения без завершения изменения полосы движения.
[0102] Контроллер 180 оценивает положение Bx встречного транспортного средства B во время tx виртуального прибытия и определяет, необходимо ли исправление в соответствии с тем, присутствует ли оцененное положение Bx встречного транспортного средства B в области Y пересечения. Когда положение Bx находится внутри области Y пересечения, задействуемое транспортное средство A и встречное транспортное средство B движутся к точке X пересечения, обращенные друг к другу, в одно и то же время, и существует высокая вероятность того, что оба транспортных средства приблизятся друг к другу, и, таким образом, определяется, что необходимо исправление информации управления вождением.
[0103] Фиг.8 представляет собой блок-схему последовательности операций управления содействием движению согласно второму варианту осуществления. Согласно блок-схеме, по сравнению с управлением содействием движению первого варианта осуществления, показанного на Фиг.2, обработка этапа S61 предоставляется после этапа S6.
[0104] На этапе S61 контроллер 180 устанавливает область Y пересечения, имеющую предварительно определенную длину области в направлении вперед-назад вдоль направления маршрута продвижения встречного транспортного средства B с точкой X пересечения в качестве центра. Здесь длина области может быть фиксированным значением, полученным посредством умножения скорости встречного транспортного средства B на разность td по времени, или может быть переменным значением, как показано в модификации, которая будет описана ниже.
[0105] На этапе S7 контроллер 180 оценивает положение Bx встречного транспортного средства B во время tx виртуального прибытия и определяет, необходимо ли исправление в соответствии с тем, присутствует ли оцененное положение Bx встречного транспортного средства B в области Y пересечения. Когда положение Bx встречного транспортного средства B во время tx виртуального прибытия находится внутри области Y пересечения, определяется, что необходимо исправление информации управления вождением.
[0106] Таким образом, когда положение Bx встречного транспортного средства B во время tx виртуального прибытия находится внутри области Y пересечения, определяется, что необходимо исправление информации управления вождением (S7: Да), и затем выполняется обработка исправления на этапе S8. Когда положение Bx встречного транспортного средства B находится вне области Y пересечения, определяется, что исправление информации управления вождением не требуется (S7: Нет), и затем выполняется обработка содействия этапа S9.
[0107] Согласно способу содействия движению по второму варианту осуществления, как показано на Фиг.7, контроллер 180 определяет точку X пересечения между прогнозируемым маршрутом движения встречного транспортного средства B и виртуальным маршрутом продвижения задействуемого транспортного средства A в течение изменения полосы движения (S6), и дополнительно определяет область Y пересечения, имеющую длину области в направление вперед-назад встречного транспортного средства B относительно точки X пересечения (S61). Затем контроллер 180 определяет, присутствует ли встречное транспортное средство B в области Y пересечения во время tx виртуального прибытия, прогнозируемое исходя из предположения, что задействуемое транспортное средство A достигает точки X пересечения (S7).
[0108] Когда встречное транспортное средство B присутствует в области Y пересечения, задействуемое транспортное средство А и встречное транспортное средство B продвигаются к точке X пересечения, обращенными друг к другу. Следовательно, контроллер 180 изменяет информацию управления вождением (S8) и выполняет содействие вождению задействуемого транспортного средства А на основе измененной информации управления вождением (S9), тем самым выполняя управление таким образом, чтобы встречное транспортное средство B не присутствовало в области Y пересечения во время tx виртуального прибытия. В частности, когда выполняется исправление, показанное на Фиг.4A-4C, встречное транспортное средство B находится перед областью Y пересечения во время tx виртуального прибытия, и когда коррекция, показанная на Фиг.5A и 5B, встречное транспортное средство B расположено позади области Y пересечения во время tx виртуального прибытия.
[0109] Здесь, в случае, когда встречное транспортное средство B присутствует в области Y пересечения во время tx виртуального прибытия, до времени tx времени виртуального прибытия, задействуемое транспортное средство A и встречное транспортное средство B продвигаются к точке X пересечения, обращенными друг к другу, в одно и то же время, и, таким образом, оба транспортных средства приближаются друг к другу. Благодаря такому подходу водитель задействуемого транспортного средства А может выполнить операцию вождения, чтобы предотвратить движение обоих транспортных средств, когда они обращены друг к другу. Однако, поскольку встречное транспортное средство B находится вне области Y пересечения во время tx виртуального прибытия посредством исправления информации управления вождением, описанной выше, исключается приближение задействуемого транспортного средства A и встречного транспортного средства B друг к другу, когда они обращены друг к другу.
[0110] Как описано выше, согласно способу содействия движению по второму варианту осуществления, можно определить, необходимо ли исправлять информацию управления вождением, посредством получения области Y пересечения и положения Bx встречного транспортного средства B во время tx виртуального прибытия вместо вычисления времени tb прогнозируемого прибытия, как в первом варианте осуществления. В результате повышается гибкость способа проектирования, и исключается переход поведения задействуемого транспортного средства А в неустойчивую точку, вызванную выполнением водителем операции во время содействия вождению, и, таким образом, становится возможным улучшить стабильность управления содействием вождению.
[0111] (Модификация)
В первом и втором вариантах осуществления область Y пересечения устанавливается таким образом, чтобы иметь предварительно определенную длину области в направлении вперед-назад встречного транспортного средства В относительно точки X пересечения. В настоящей модификации приведен пример, в котором длина области Y пересечения в направлении вперед-назад изменяется под действием внешнего фактора.
[0112] В качестве первого примера, чем выше относительная скорость между задействуемым транспортным средством A и встречным транспортным средством B, тем больше длина области у области пересечения в направлении вперед-назад. По мере увеличения относительной скорости водитель задействуемого транспортного средства А стремится не предпочесть, чтобы встречное транспортное средство B приблизилось к задействуемому транспортному средству А, обращенными друг к другу. Следовательно, за счет увеличения длины области Y пересечения по мере увеличения относительной скорости между задействуемым транспортным средством А и встречным транспортным средством В встречное транспортное средство B с большей вероятностью будет включено в область Y пересечения, и, таким образом, информация управления вождением скорее всего изменится. В результате можно исключить приближение задействуемого транспортного средства А и встречного транспортного средства В.
[0113] В качестве второго примера, чем уже ширина дороги задействуемого транспортного средства A или встречного транспортного средства B, тем больше длина области у области Y пересечения. Поскольку ширина дороги уже, водитель задействуемого транспортного средства A стремится не предпочитать, чтобы встречное транспортное средство B приближалось к задействуемому транспортному средству A, обращенными друг к другу. Следовательно, при дальнейшем увеличении длины области Y пересечения, поскольку ширина дороги задействуемого транспортного средства А и встречного транспортного средства В меньше, встречное транспортное средство B с большей вероятностью будет включено в область Y пересечения, и, таким образом, информация управления вождением, скорее всего, будет изменена. В результате можно исключить приближение задействуемого транспортного средства А и встречного транспортного средства В.
[0114] Аналогичным образом, поскольку задействуемое транспортное средство A или встречное транспортное средство B меньше, водитель задействуемого транспортного средства A имеет склонен не предпочитать, чтобы встречное транспортное средство B приблизилось к задействуемому транспортному средству A, обращенными друг к другу. Например, контроллер 180 может определить размер задействуемого транспортного средства A или встречного транспортного средства B на основе типа транспортного средства задействуемого транспортного средства A, сохраненного заранее, или внешней формы встречного транспортного средства B, изображаемой камерой 110. В другом примере контроллер 180 может установить длину области в соответствии с шириной задействуемого транспортного средства A или встречного транспортного средства B.
[0115] Таким образом, за счет дополнительного увеличения контроллером 180 длины области Y пересечения, поскольку задействуемое транспортное средство A и встречное транспортное средство B малы, встречное транспортное средство B с большей вероятностью будет включено в пересечение области Y, и, таким образом, информация управления вождением, скорее всего, будет изменена. В результате можно исключить приближение задействуемого транспортного средства А и встречного транспортного средства В.
[0116] (Третий вариант осуществления)
В первом или втором варианте осуществления был описан случай, когда одно встречное транспортное средство B движется по встречной полосе движения, но настоящее изобретение не ограничивается этим. В третьем варианте осуществления может быть определено, необходимо ли исправление информации управления вождением в случае присутствия множества встречных транспортных средств B.
[0117] При обнаружении множества встречных транспортных средств B, движущихся по встречной полосе маршрута продвижения после изменения полосы движения, контроллер 180 определяет, необходимо ли изменить информацию управления вождением для множества встречных транспортных средств B. Когда определено, что необходимо изменить информацию управления вождением для по меньшей мере одного встречного транспортного средства B, информация управления вождением изменяется. Однако с целью уменьшения нагрузки обработки необходимость изменения может не определяться для некоторых встречных транспортных средств B. Такая ситуация будет описана со ссылкой на Фиг.9-11.
[0118] Фиг.9 и 10 являются схемами, показывающими ситуацию, в которой выполняется управление содействием движению согласно третьему варианту осуществления. Согласно фигурам показаны задействуемое транспортное средство А и множество встречных транспортных средств с D1 по D3.
[0119] В примере на Фиг.9, встречные транспортные средства D1, D2 и D3 движутся по встречной полосе движения в порядке направления продвижения. Встречные транспортные средства D1 и D3 движутся по внутренней полосе движения, а встречное транспортное средство D2 движется по внешней встречной полосе движения. Предполагается, что встречное транспортное средство D1 намеревается изменить полосу движения на дальнюю полосу движения. Предполагается, что контроллер 180 может прогнозировать маршрут продвижения каждого из встречных транспортных средств D1-D3 с использованием информации формирования изображения камеры 110.
[0120] В таком случае контроллер 180 пропускает определение необходимости изменения информации управления вождением для встречного транспортного средства D2, линейно продвигающегося по внешней полосе движения, и встречного транспортного средства D1, пытающегося изменить полосу движения на внешнюю полосу движения, и определяет, необходимо ли изменить информацию управления вождением для встречного транспортного средства D3, движущегося по внутренней полосе движения. Таким образом, можно уменьшить количество целевых встречных транспортных средств D и, таким образом, можно уменьшить нагрузку обработки управления содействием движению.
[0121] В примере на Фиг.10, встречные транспортные средства D1, D2 и D3 движутся по встречной полосе движения в порядке направления движения. Встречные транспортные средства D1 и D2 движутся по внешней полосе движения, а встречное транспортное средство D3 движется по внутренней встречной полосе движения. Предполагается, что встречное транспортное средство D1 намеревается изменить полосу движения на внутреннюю полосу движения, а встречное транспортное средство D3 намеревается изменить полосу движения на внешнюю полосу движения.
[0122] В таком случае контроллер 180 пропускает определение того, необходимо ли изменить информацию управления вождением для встречного транспортного средства D2, линейно продвигающегося по внешней полосе движения, и встречного транспортного средства D3, изменяющего полосу движения на внешнюю полосу движения, и определяет, необходимо ли изменить информацию управления вождением для встречного транспортного средства D1, изменяющего полосу движения на внутреннюю полосу движения. В этом случае определяется точка X пересечения между виртуальным маршрутом продвижения задействуемого транспортного средства A в течение изменения полосы движения и прогнозируемым маршрутом движения встречного транспортного средства D1, которое выполняет изменение полосы движения. Таким образом, можно уменьшить количество целевых встречных транспортных средств D и, таким образом, можно уменьшить нагрузку обработки управления содействием движению.
[0123] Как показано на Фиг.11, в случае, когда между полосой движения задействуемого транспортного средства А и встречной полосой движения, по которой движется встречное транспортное средство B, имеется разделительная полоса Е, даже если задействуемое транспортное средство А и встречное транспортное средство B движутся к точке X пересечения, водитель задействуемого транспортного средства А с меньшей вероятностью будет испытывать беспокойство. Следовательно, можно уменьшить нагрузку обработки управления содействием движению посредством исключения управления изменением информации управления вождением.
[0124] (Четвертый вариант осуществления)
В вариантах осуществления с первого по третий было описано изменение полосы движения, выполняемое задействуемым транспортным средством, но настоящее изобретение не ограничивается этим. В четвертом варианте осуществления будет описан пример изменения полосы движения, в котором задействуемое транспортное средство поворачивает и входит в полосу движения линейного продвижения с боковой дороги на Т-образном перекрестке, где полоса движения линейного продвижения и боковая дорога пересекаются друг с другом.
[0125] Фиг.12 и 13 являются схемами, показывающими ситуацию, в которой выполняется управление содействием движению согласно четвертому варианту осуществления.
[0126] В примере на Фиг.12 предполагается, что на Т-образном перекрестке, где полоса движения, состоящая из одной полосы движения с каждой стороны, пересекается с боковой дорогой, выполняется изменение полосы движения таким образом, что задействуемое транспортное средство А поворачивает и въезжает на полосу движения со стороны боковой дороги. При изменении полосы движения на Т-образном перекрестке выполняется поворот налево для въезда на полосу движения со стороны, прилегающей к боковой дороге, вместо поворота направо на Т-образном перекрестке, пересекающего встречную полосу.
[0127] Что касается задействуемого транспортного средства A, то показаны задействуемое транспортное средство A1 в момент времени t1, когда начинается изменение полосы движения (поворот), задействуемое транспортное средство A2 в момент времени t2, когда задействуемое транспортное средство A поворачивает, и задействуемое транспортное средство A3 в момент времени t3, когда изменение полосы движения (поворот) завершено. Аналогичным образом, относительно встречного транспортного средства В показаны встречные транспортные средства с В1 по В3, соответствующие моментам времени с t1 по t3.
[0128] Также в таком случае контроллер 180 получает точку X пересечения между спрогнозированной полосой движения встречного транспортного средства B и виртуальным маршрутом продвижения, являющимся виртуальным продолжением маршрута продвижения задействуемого транспортного средства A в направлении продвижения в течение изменения полосы движения. Может быть получено время ta виртуального прибытия, пока задействуемое транспортное средство A не достигнет точки X пересечения, и время tb прогнозируемого прибытия, пока встречное транспортное средство B не достигнет точки X пересечения, и может быть определено, необходимо ли изменить информацию управления вождением в соответствии с тем, находится ли разность td по времени между временем ta виртуального прибытия и временем tb прогнозируемого прибытия внутри предварительно определенного диапазона.
[0129] На фигуре следующее транспортное средство F показано с правой стороны от задействуемого транспортного средства A в течение изменения полосы движения, то есть позади задействуемого транспортного средства A после изменения полосы движения. Контроллер 180 может определить точку пересечения в соответствии с точкой пересечения между виртуальным маршрутом продвижения в течение поворота задействуемого транспортного средства А и прогнозируемым маршрутом продвижения следующего транспортного средства F, и может определить, необходимо ли изменить информацию управления вождением в соответствии с разностью по времени между моментом времени, когда задействуемое транспортное средство A достигает точки пересечения, и прогнозируемым временем, пока следующее транспортное средство F не достигает точки пересечения. Таким образом, можно исключить приближение задействуемого транспортного средства A и следующего транспортного средства F друг к другу.
[0130] На Фиг.13 показан пример, в котором задействуемое транспортное средство А поворачивает на главную полосу движения, когда встречное транспортное средство B является двухколесным транспортным средством на Т-образном перекрестке без полосы движения. Даже в этом случае, выполняя управление содействием движению, контроллер 180 может определить, изменяется ли информация управления вождением, посредством определения области Y пересечения от точки X пересечения между виртуальным маршрутом продвижения в течение поворота задействуемого транспортного средства А и прогнозируемой полосой движения встречного транспортного средства B и определения того, находится ли встречное транспортное средство B внутри области Y пересечения во время tx виртуального прибытия.
[0131] Управление содействием движению, описанное выше, не ограничено случаем, когда задействуемое транспортное средство выполняет изменение полосы движения, например, изменение полосы движения или маршрута движения, как описано выше, и включает в себя случай, когда задействуемое транспортное средство начинает движение с обочины дороги.
[0132] Несмотря на то, что варианты осуществления настоящего изобретения были описаны выше, варианты осуществления просто иллюстрируют некоторые из примеров применения настоящего изобретения и не предназначены для ограничения технического объема настоящего изобретения конкретными конфигурациями вариантов осуществления.
[0133] Каждый из вариантов осуществления, описанных выше, был описан как отдельный вариант осуществления, но может быть соответствующим образом объединен.

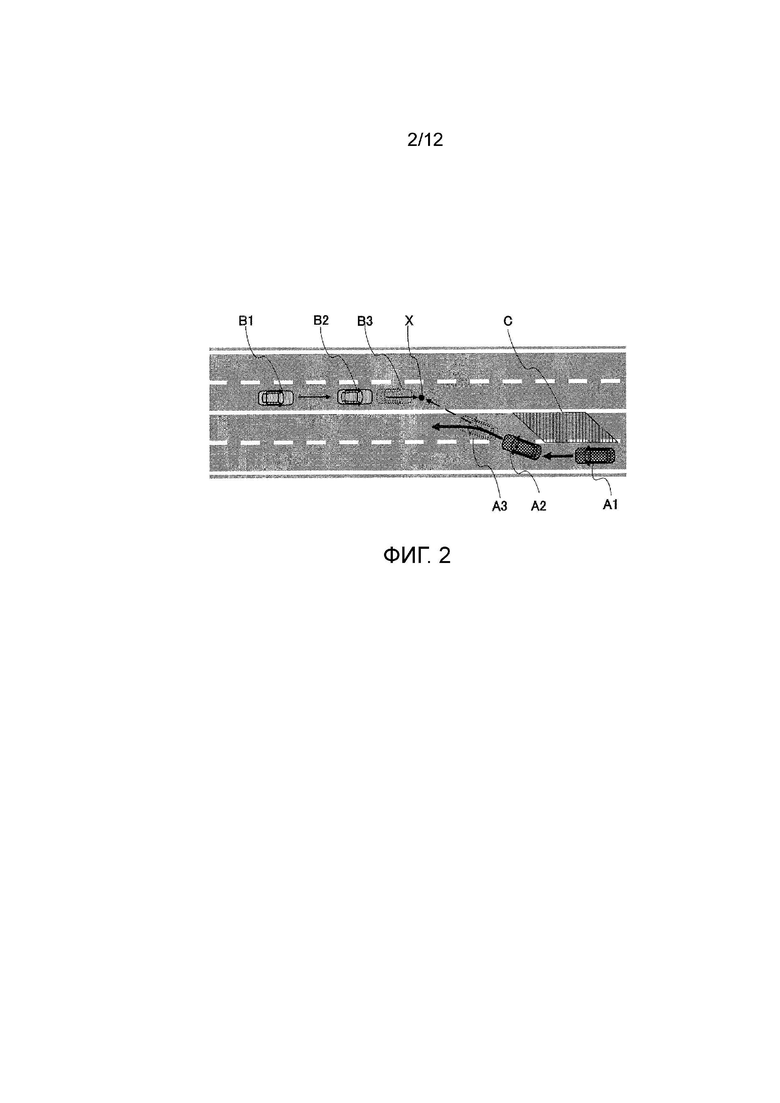


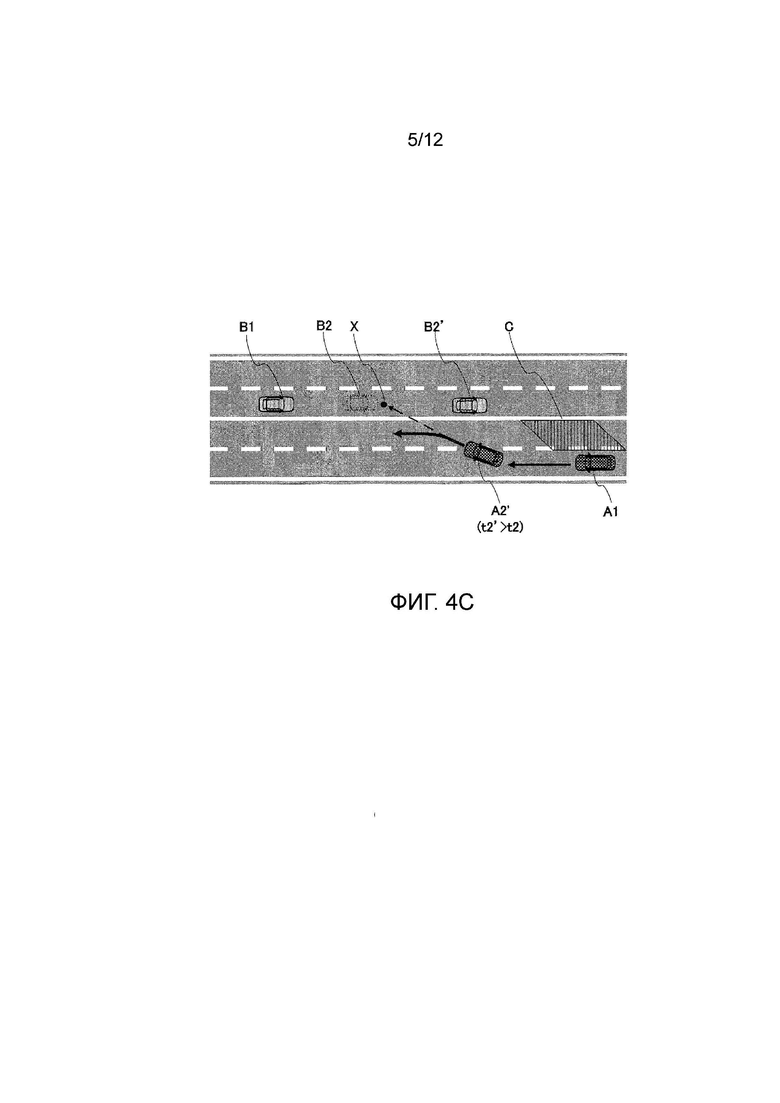



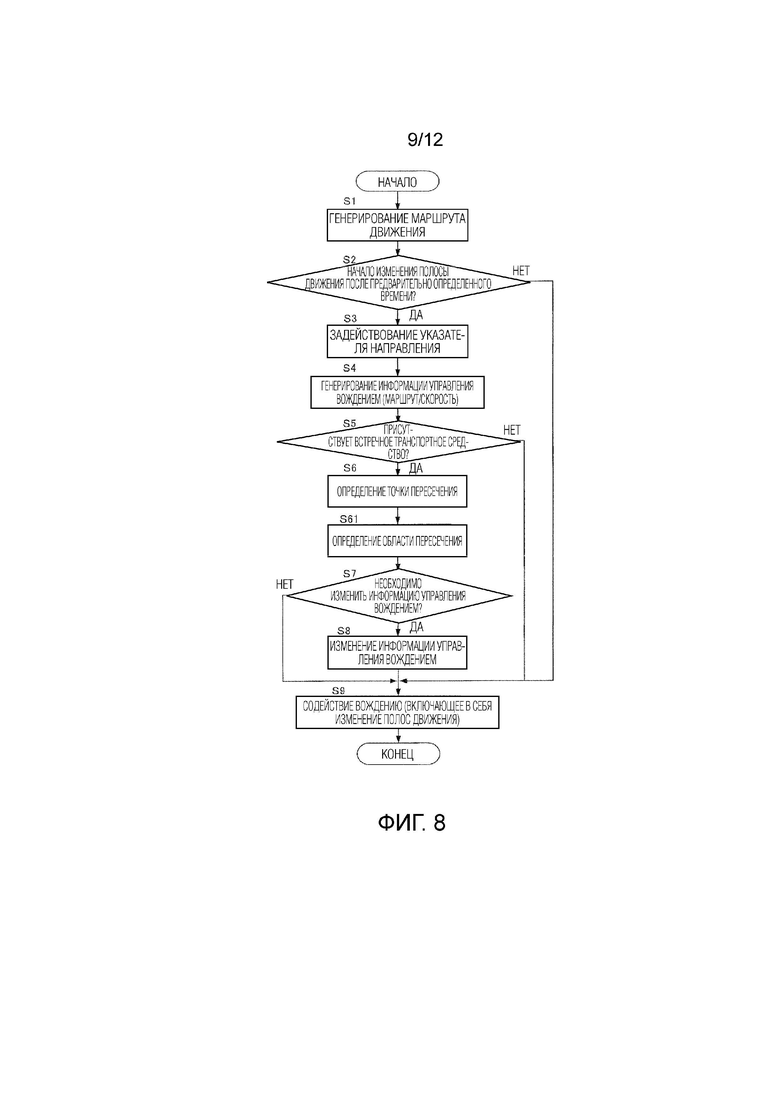

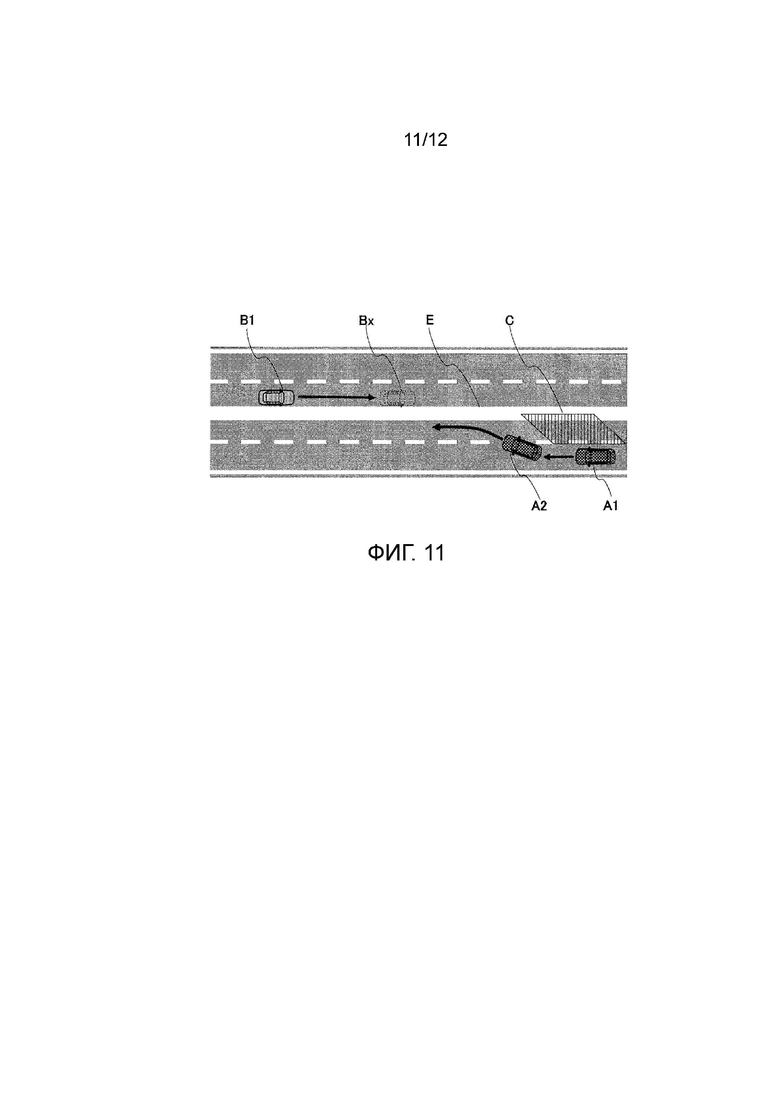

Группа изобретений относится к способу и устройству содействия движению. Устройство содействия движению содержит датчик для обнаружения окружающей обстановки задействуемого транспортного средства. Устройство содействия движению выполнено с возможностью определять маршрут движения и скорость транспортного средства, осуществлять изменение полосы движения транспортного средства, обнаруживать встречное транспортное средство, движущееся по встречной полосе движения, определять точку пересечения между виртуальным маршрутом продвижения и линейным маршрутом продвижения, осуществлять изменение полосы движения с использованием маршрута и скорости транспортного средства. Виртуальный маршрут продвижения отличается от упомянутого маршрута и является виртуальным продолжением маршрута продвижения задействуемого транспортного средства в направлении продвижения в течение периода от начала до конца изменения полосы движения. Достигается исключение приближения другого транспортного средства, движущегося вне маршрута движения задействуемого транспортного средства, к задействуемому транспортному средству в состоянии нахождения обращенным к задействуемому транспортному средству спереди задействуемого транспортного средства. 2 н. и 11 з.п. ф-лы, 13 ил.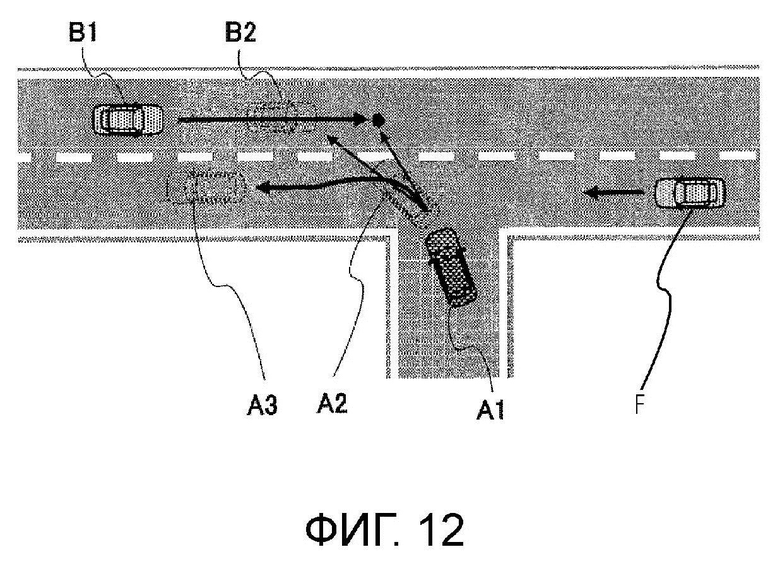
1. Способ содействия движению для выполнения изменения полосы движения задействуемого транспортного средства с использованием определенных маршрута и скорости транспортного средства, причем способ содействия движению содержит этапы, на которых:
обнаруживают встречное транспортное средство, движущееся по встречной полосе движения, встречной по отношению к полосе движения, по которой движется задействуемое транспортное средство, когда задействуемое транспортное средство начинает изменение полосы движения;
определяют точку пересечения между виртуальным маршрутом продвижения и линейным маршрутом продвижения, по которому встречное транспортное средство продвигается линейно, при этом виртуальный маршрут продвижения отличается от упомянутого маршрута и является виртуальным продолжением маршрута продвижения задействуемого транспортного средства в направлении продвижения в течение периода от начала до конца изменения полосы движения;
осуществляют изменение полосы движения с использованием маршрута и скорости транспортного средства в случае, когда разность по времени между первым прогнозируемым временем, когда предполагается, что задействуемое транспортное средство достигает точки пересечения, и вторым прогнозируемым временем, пока встречное транспортное средство не достигнет точки пересечения, находится вне предварительно определенного диапазона; и
когда разность по времени находится внутри этого предварительно определенного диапазона, осуществляют изменение полосы движения посредством изменения по меньшей мере одного из маршрута и скорости транспортного средства таким образом, чтобы разность по времени находилась вне упомянутого предварительно определенного диапазона.
2. Способ содействия движению по п.1, дополнительно содержащий этап, на котором осуществляют замедление перед началом изменения полосы движения, когда разность по времени находится внутри упомянутого предварительно определенного диапазона и первое прогнозируемое время больше второго прогнозируемого времени.
3. Способ содействия движению по п.1, дополнительно содержащий этап, на котором осуществляют ускорение перед началом изменения полосы движения, когда разность по времени находится внутри упомянутого предварительно определенного диапазона и первое прогнозируемое время равно или меньше второго прогнозируемого времени.
4. Способ содействия движению по п.1, дополнительно содержащий этап, на котором изменяют маршрут с тем, чтобы уменьшить угол рулевого управления при изменении полосы движения, когда разность по времени находится внутри упомянутого предварительно определенного диапазона и первое прогнозируемое время больше второго прогнозируемого времени.
5. Способ содействия движению по п.1, дополнительно содержащий этап, на котором изменяют маршрут с тем, чтобы увеличить угол рулевого управления при изменении полосы движения, когда разность по времени находится внутри упомянутого предварительно определенного диапазона и первое прогнозируемое время равно или меньше второго прогнозируемого времени.
6. Способ содействия движению по п.1, дополнительно содержащий этап, на котором изменяют маршрут таким образом, что начальное положение при изменении полосы движения находится на передней стороне в направлении продвижения, когда разность по времени находится внутри упомянутого предварительно определенного диапазона и первое прогнозируемое время больше второго прогнозируемого времени.
7. Способ содействия движению по п.1, дополнительно содержащий этап, на котором изменяют маршрут таким образом, что начальное положение при изменении полосы движения находится на ближней стороне в направлении продвижения, когда разность по времени находится внутри упомянутого предварительно определенного диапазона и первое прогнозируемое время равно или меньше второго прогнозируемого времени.
8. Способ содействия движению по п.1, дополнительно содержащий этапы, на которых:
определяют область пересечения, имеющую длину области согласно скорости встречного транспортного средства и разности по времени в направлении вперед-назад маршрута продвижения встречного транспортного средства относительно точки пересечения;
определяют, находится ли встречное транспортное средство внутри области пересечения после первого прогнозируемого времени;
осуществляют изменение полосы движения с использованием маршрута и скорости транспортного средства, когда встречное транспортное средство находится вне области пересечения после первого прогнозируемого времени; и
когда встречное транспортное средство находится внутри области пересечения после первого прогнозируемого времени, осуществляют изменение полосы движения посредством изменения по меньшей мере одного из маршрута и скорости транспортного средства таким образом, чтобы встречное транспортное средство находилось вне области пересечения после первого прогнозируемого времени.
9. Способ содействия движению по п.8, в котором чем выше относительная скорость между задействуемым транспортным средством и встречным транспортным средством, тем больше длина области у области пересечения.
10. Способ содействия движению по п.8, в котором чем уже ширина дороги маршрута движения задействуемого транспортного средства после изменения полосы движения или чем уже ширина дороги маршрута движения встречного транспортного средства, тем больше длина области у области пересечения.
11. Способ содействия движению по п.8, в котором чем меньше задействуемое транспортное средство или встречное транспортное средство, тем больше длина области у области пересечения.
12. Способ содействия движению по любому одному из пп.1-11, дополнительно содержащий этапы, на которых:
обнаруживают присутствие или отсутствие разделительной полосы между маршрутом движения после изменения полосы движения и маршрутом движения встречного транспортного средства; и
изменяют маршрут при изменении полосы движения, когда разделительная полоса не обнаружена.
13. Устройство содействия движению, содержащее:
датчик, выполненный с возможностью обнаруживать окружающую обстановку задействуемого транспортного средства, при этом
устройство содействия движению выполнено с возможностью:
определять маршрут движения и скорость транспортного средства задействуемого транспортного средства на основе информации об окружающей обстановке, обнаруженной датчиком; и
осуществлять изменение полосы движения задействуемого транспортного средства с использованием этих определенных маршрута и скорости транспортного средства, и
устройство содействия движению дополнительно выполнено с возможностью:
обнаруживать встречное транспортное средство, движущееся по встречной полосе движения, встречной по отношению к полосе движения, по которой движется задействуемое транспортное средство, когда задействуемое транспортное средство начинает изменение полосы движения;
определять точку пересечения между виртуальным маршрутом продвижения и линейным маршрутом продвижения, по которому встречное транспортное средство продвигается линейно, при этом виртуальный маршрут продвижения отличается от упомянутого маршрута и является виртуальным продолжением маршрута продвижения задействуемого транспортного средства в направлении продвижения в течение периода от начала до конца изменения полосы движения;
осуществлять изменение полосы движения с использованием маршрута и скорости транспортного средства в случае, когда разность по времени между первым прогнозируемым временем, когда предполагается, что задействуемое транспортное средство достигает точки пересечения, и вторым прогнозируемым временем, пока встречное транспортное средство не достигнет точки пересечения, находится вне предварительно определенного диапазона; и
когда разность по времени находится внутри этого предварительно определенного диапазона, осуществлять изменение полосы движения посредством изменения маршрута или скорости транспортного средства таким образом, чтобы разность по времени находилась вне упомянутого предварительно определенного диапазона.
| JP 2019101854 A, 24.06.2019 | |||
| JP 2020006763 А, 16.01.2020 | |||
| JP 2016132374 A, 25.07.2016 | |||
| US 2016207534 A1, 21.07.2016 | |||
| СПОСОБ ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЯ АВТОМОБИЛЕЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2550566C2 |

