Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к способу отображения плана движения и устройству отображения плана движения.
Уровень техники
[0002] Устройство, которое информирует пешехода о маршруте движения транспортного средства-носителя, известно из уровня техники (например, см. патентный документ 1). Это устройство прогнозирует маршрут движения транспортного средства-носителя и рисует схему, которая побуждает пешеходов вблизи маршрута движения не входить на маршрут движения, чтобы тем самым информировать пешехода о приближении транспортного средства-носителя и предотвратить вход пешехода на маршрут движения транспортного средства-носителя.
Документы из уровня техники
Патентные документы
[0003] Патентный документ 1: Опубликованная заявка на патент Японии № 2014-13524
Раскрытие изобретения
Проблема, решаемая изобретением
[0004] Способ, раскрытый в Патентном документе 1, предназначен для предотвращения входа пешехода на маршрут движения транспортного средства-носителя; поэтому, когда пешеход намеревается перейти дорогу, невозможно отобразить информацию, необходимую для определения того, следует ли пешеходу перейти дорогу.
[0005] Ввиду проблемы, описанной выше, задача настоящего изобретения состоит в создании способа отображения плана движения и устройства отображения плана движения, которые способны отображать пешеходу информацию, необходимую для определения, следует ли перейти дорогу.
Средство для решения проблемы
[0006] Для решения задачи, описанной выше, способ отображения плана движения и устройство отображения плана движения согласно настоящему изобретению выполнены с возможностью отображения изображения на поверхности дороги в прогнозируемой точке перехода, в которой прогнозируется, что пешеход перейдёт дорогу, информацию, относящуюся к плану движения транспортного средства-носителя, от текущего положения транспортного средства-носителя до прогнозируемой точки перехода.
Эффекты изобретения
[0007] Способ отображения плана движения и устройство отображения плана движения согласно настоящему изобретению могут отображать пешеходу информацию, необходимую для определения, следует ли переходить дорогу.
Краткое описание чертежей
[0008] Фиг.1 - общий вид системы, иллюстрирующий систему A автономного управления движением, в которой применяются способ отображения плана движения и устройство отображения плана движения согласно первому варианту осуществления.
Фиг.2 - блок-схема, иллюстрирующая последовательность операций процесса отображения информации о плане движения, выполняемого контроллером 40 отображения плана движения системы A автономного управления движением.
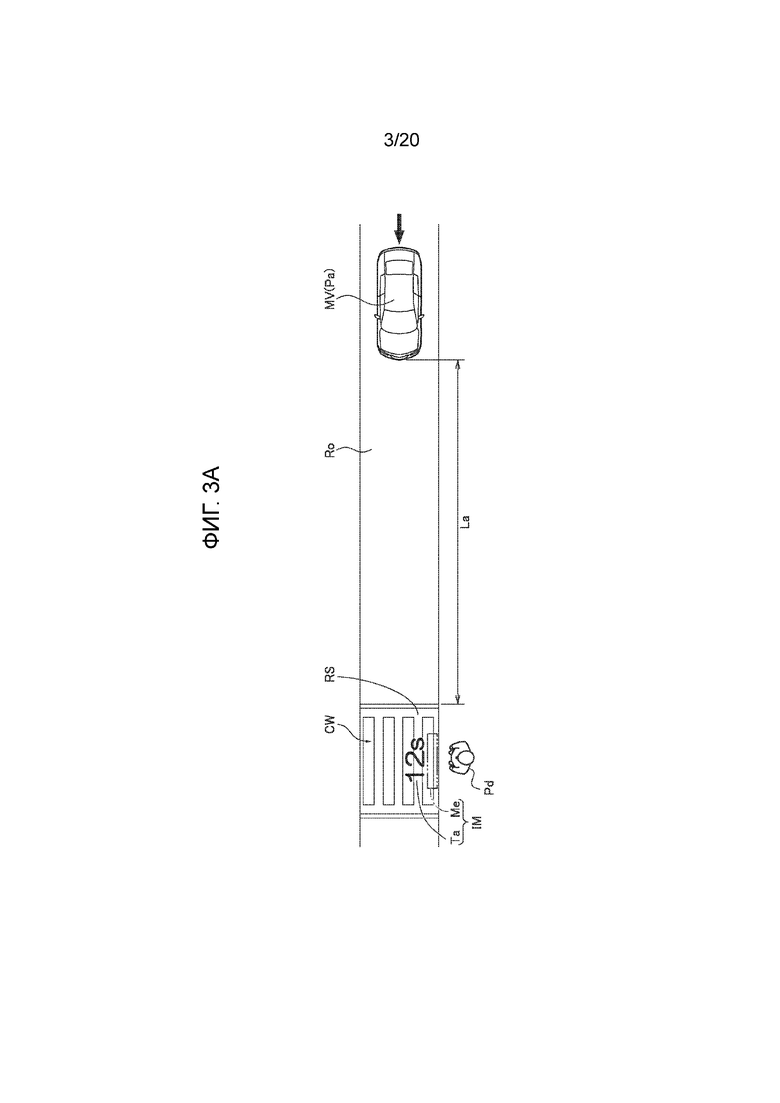
Фиг. 3A - вид сверху, иллюстрирующий один пример изображения IM, отображаемого посредством процесса отображения информации о плане движения, согласно первому варианту осуществления, и состояние, в котором расстояние между транспортным средством MV (транспортным средством-носителем) и пешеходным переходом CW как прогнозируемой точкой перехода составляет расстояние La.
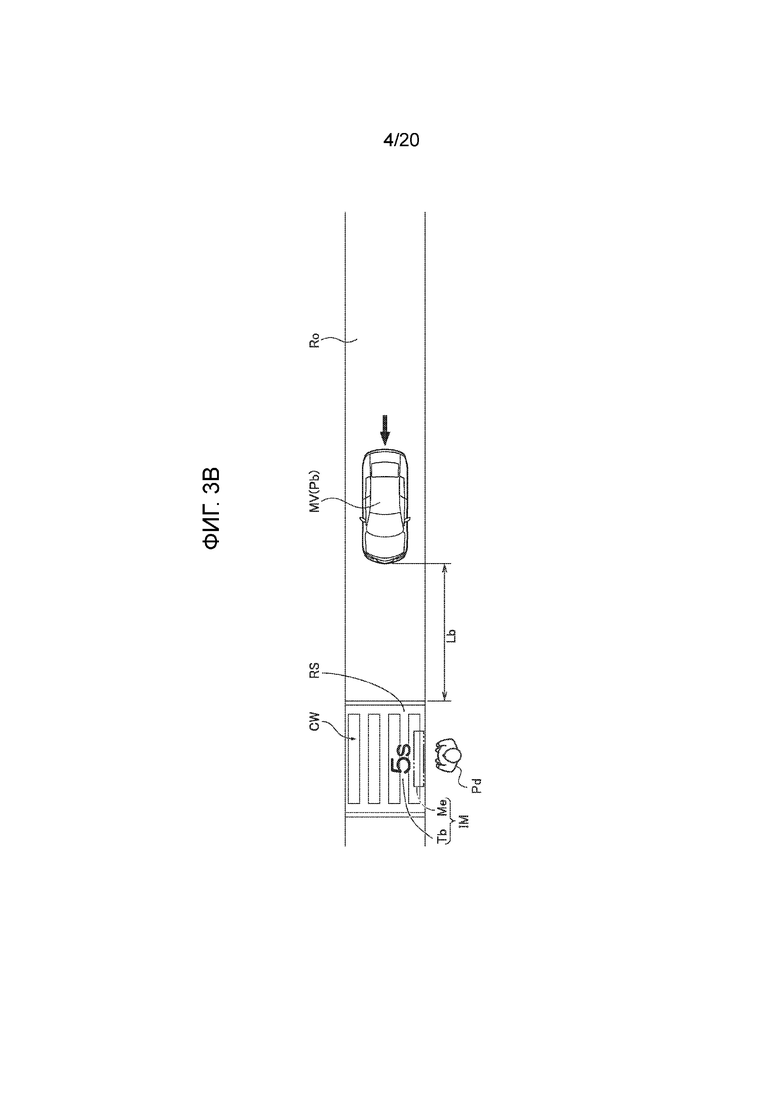
Фиг. 3B - вид сверху, иллюстрирующий один пример изображения IM, отображаемого посредством процесса отображения информации о плане движения согласно первому варианту осуществления, и состояние, в котором расстояние между транспортным средством MV (транспортное средство-носитель) и пешеходным переходом CW как прогнозируемой точкой перехода составляет расстояние Lb, которое меньше расстояния La.
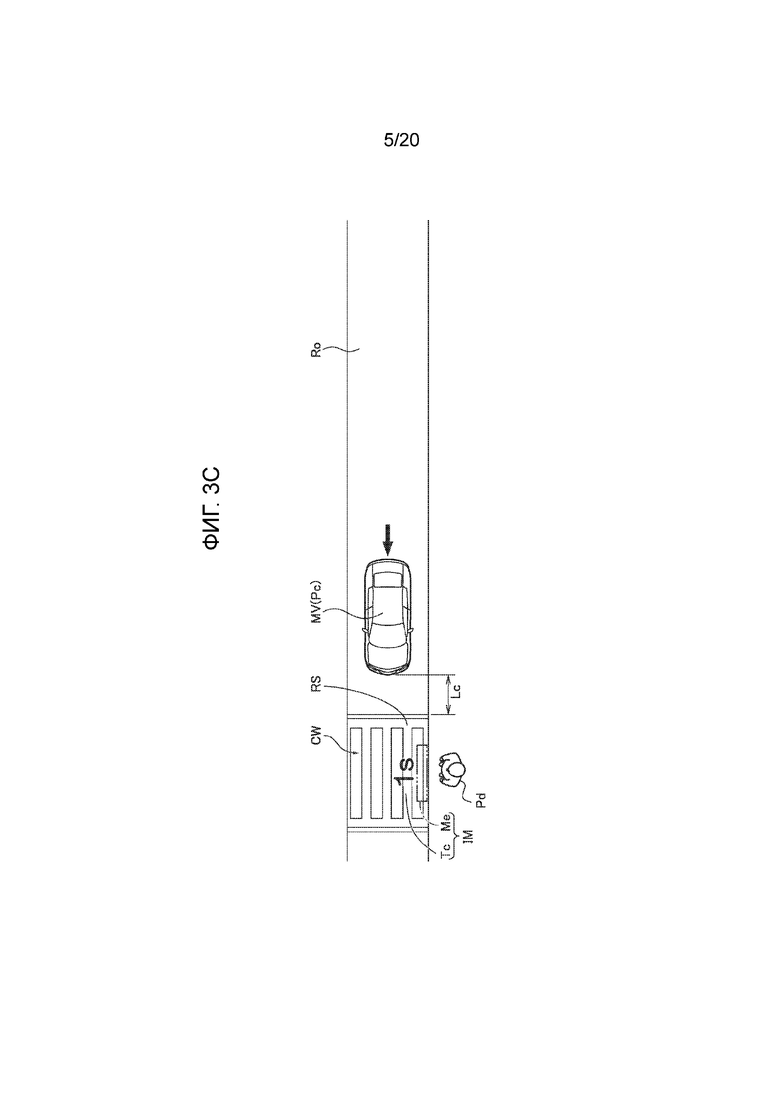
Фиг. 3C - вид сверху, иллюстрирующий один пример изображения IM, отображаемого посредством процесса отображения информации о плане движения согласно первому варианту осуществления, и состояние, в котором расстояние между транспортным средством MV (транспортное средство-носитель) и пешеходным переходом CW как прогнозируемой точкой перехода составляет расстояние Lc, которое меньше расстояния Lb.
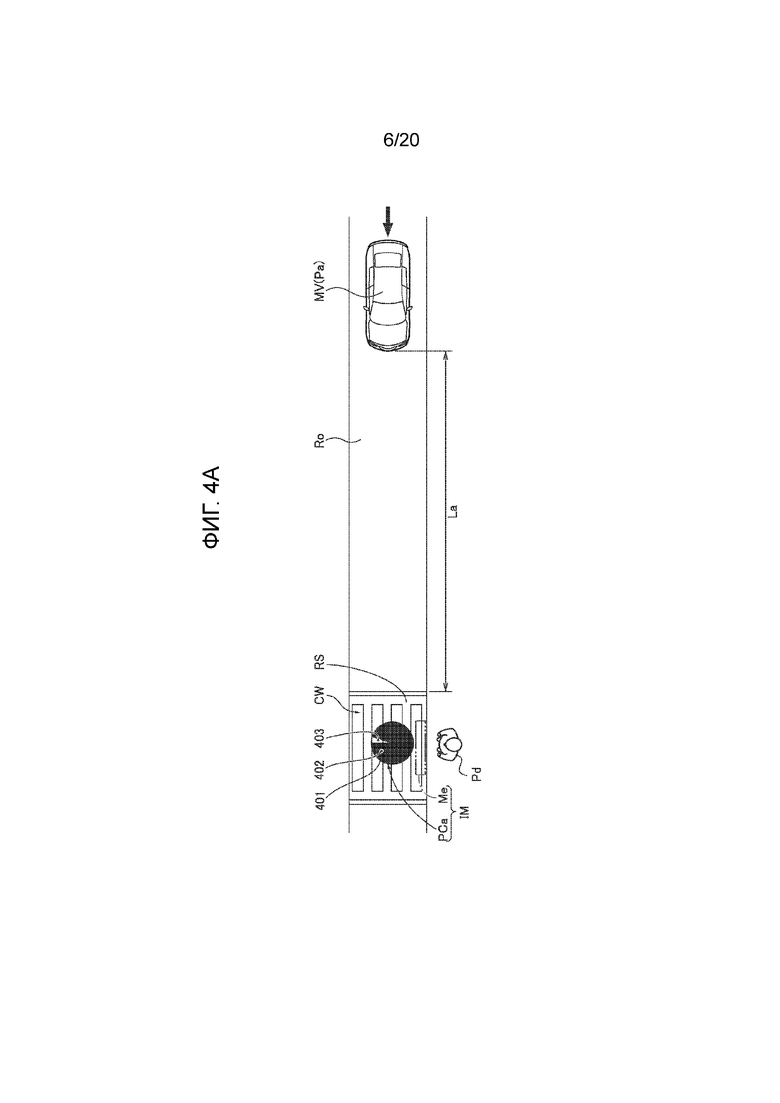
Фиг. 4A - вид сверху, иллюстрирующий один пример изображения IM, отображаемого посредством процесса отображения информации о плане движения, согласно второму варианту осуществления, и состояние, в котором расстояние между транспортным средством MV (транспортное средство-носитель) и пешеходным переходом CW как прогнозируемой точкой перехода составляет расстояние La.
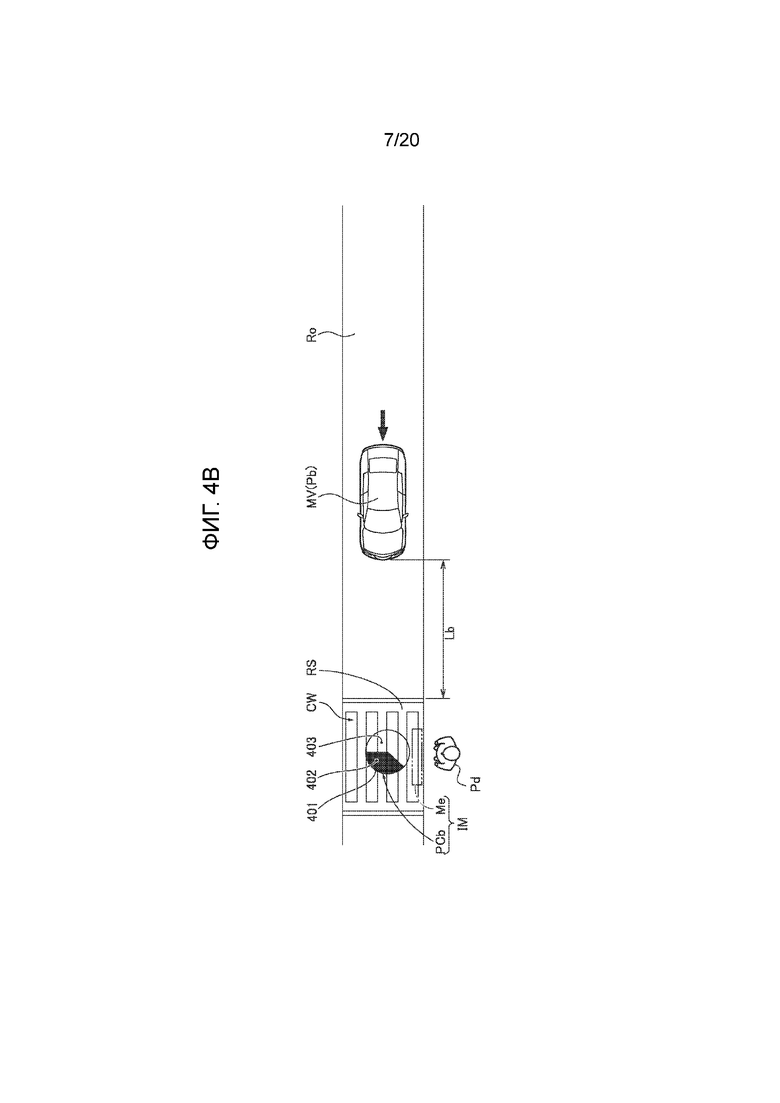
Фиг. 4B - вид сверху, иллюстрирующий один пример изображения IM, отображаемого посредством процесса отображения информации о плане движения согласно второму варианту осуществления, и состояние, в котором расстояние между транспортным средством MV (транспортное средство-носитель) и пешеходным переходом CW как прогнозируемой точкой перехода составляет расстояние Lb, которое меньше расстояния La.
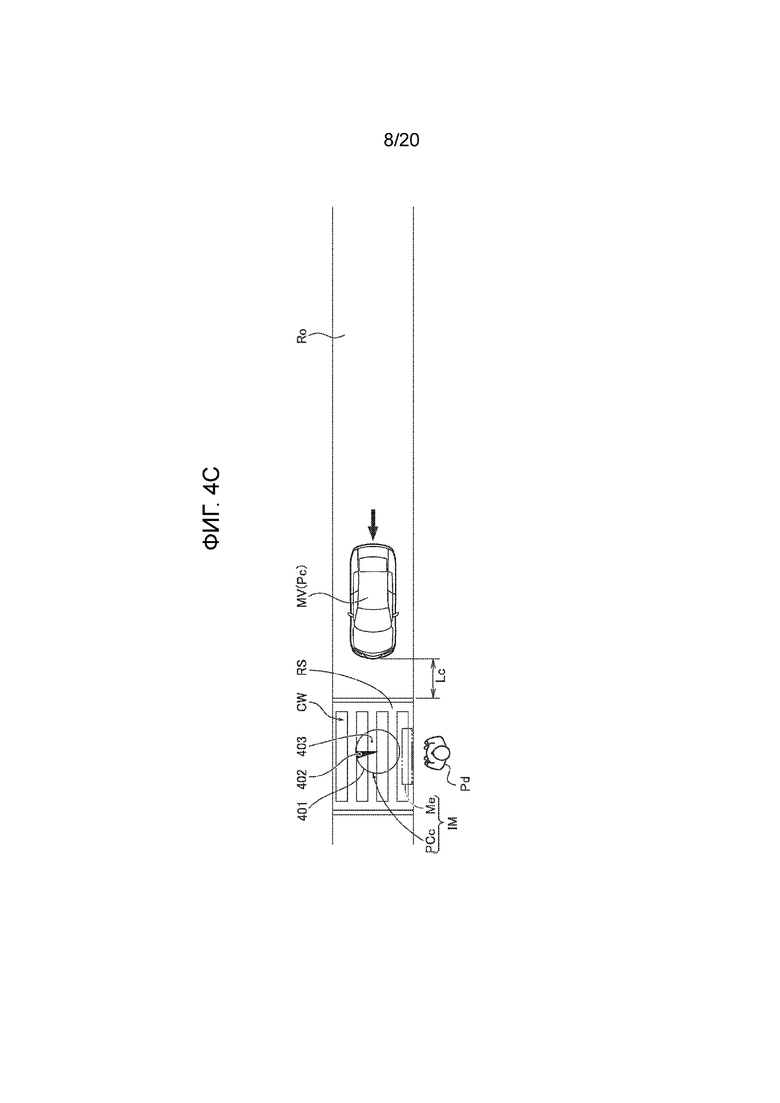
Фиг.4C - вид сверху, иллюстрирующий один пример изображения IM, отображаемого посредством процесса отображения информации о плане движения, согласно второму варианту осуществления, и состояние, в котором расстояние между транспортным средством MV (транспортное средство-носитель) и пешеходным переходом CW как прогнозируемой точкой перехода составляет расстояние Lc, которое меньше расстояния Lb.
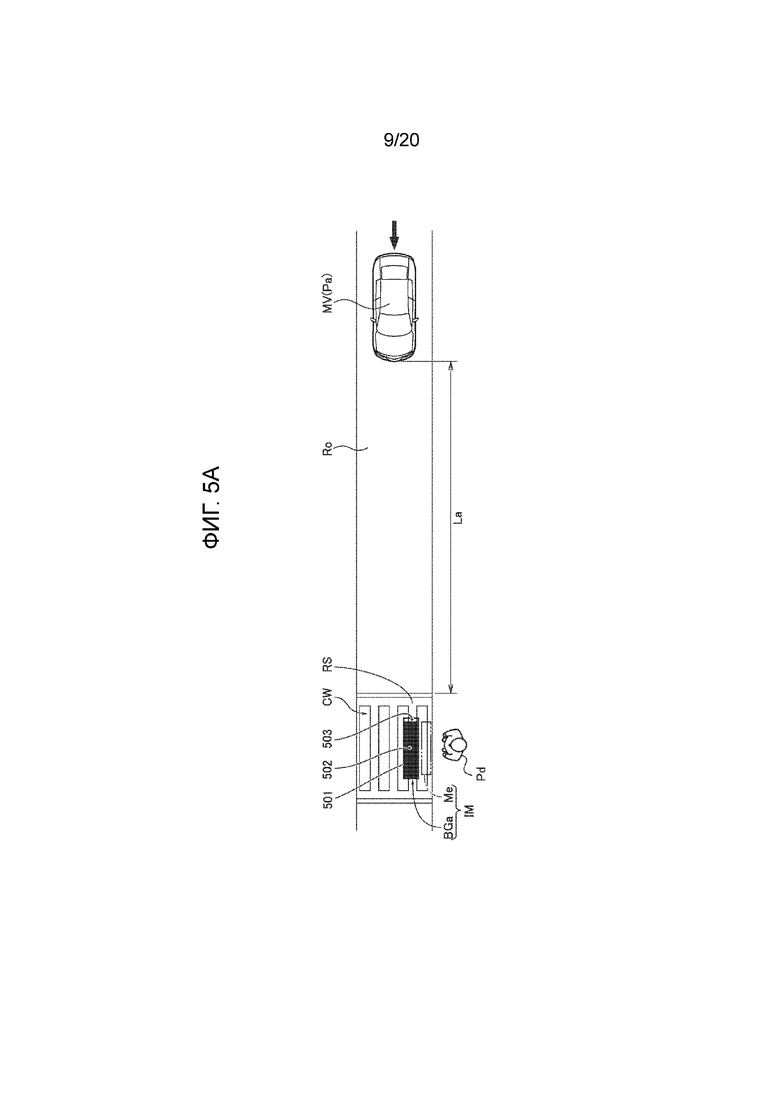
Фиг. 5A - вид сверху, иллюстрирующий один пример изображения IM, отображаемого посредством процесса отображения информации о плане движения, согласно третьему варианту осуществления, и состояние, в котором расстояние между транспортным средством MV (транспортное средство-носитель) и пешеходным переходом CW как прогнозируемой точкой перехода составляет расстояние La.
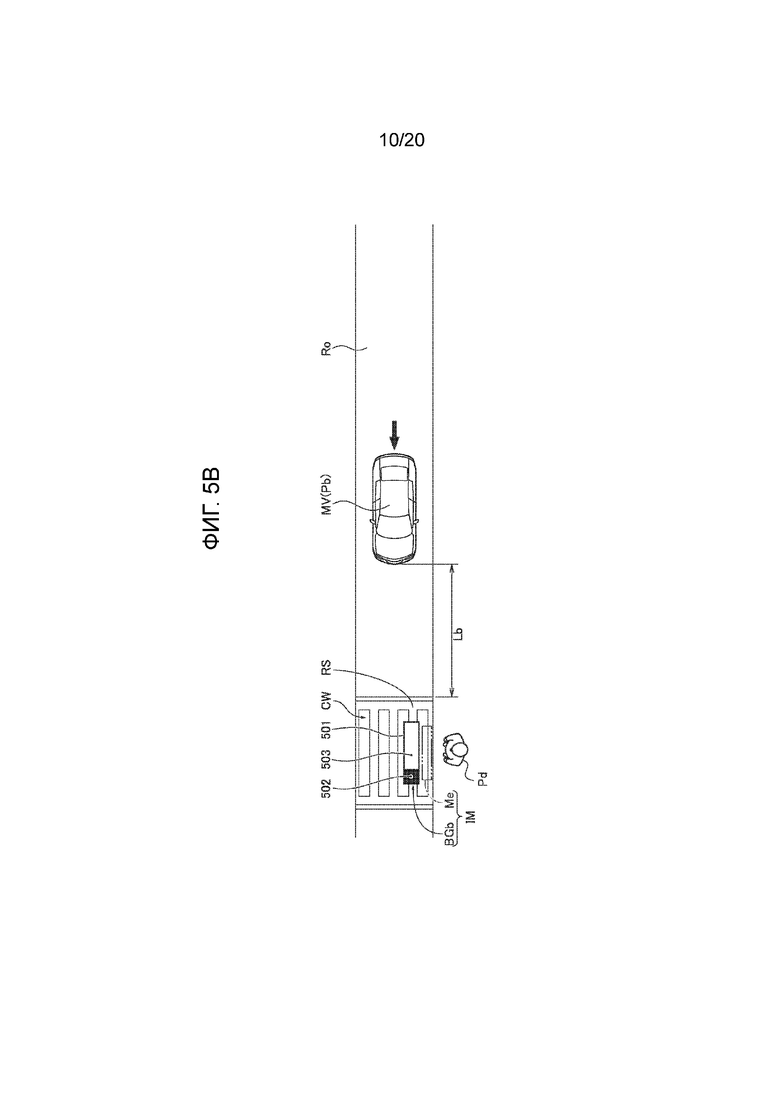
Фиг. 5B - вид сверху, иллюстрирующий один пример изображения IM, отображаемого посредством процесса отображения информации о плане движения, согласно третьему варианту осуществления, и состояние, в котором расстояние между транспортным средством MV (транспортное средство-носитель) и пешеходным переходом CW как прогнозируемой точкой перехода составляет расстояние Lb, которое меньше расстояния La.
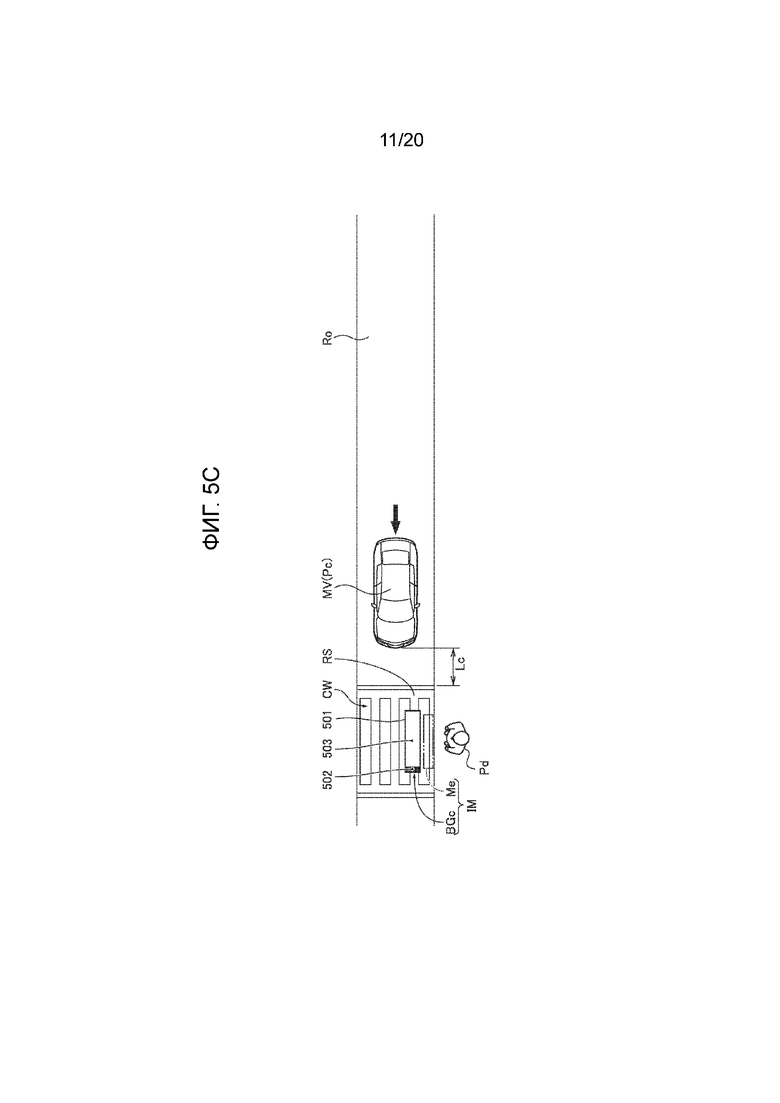
Фиг. 5C - вид сверху, иллюстрирующий один пример изображения IM, отображаемого посредством процесса отображения информации о плане движения согласно третьему варианту осуществления, и состояние, в котором расстояние между транспортным средством MV (транспортное средство-носитель) и пешеходным переходом CW как прогнозируемой точкой перехода составляет расстояние Lc, которое меньше расстояния Lb.
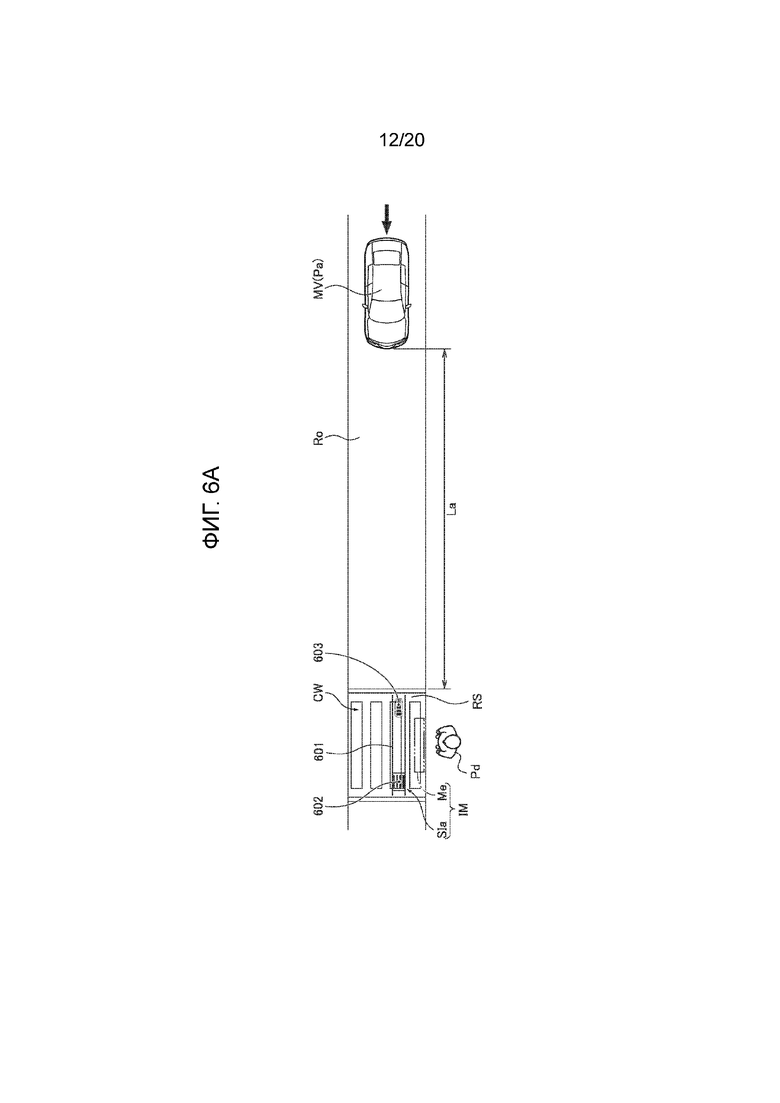
Фиг. 6A - вид сверху, иллюстрирующий один пример изображения IM, отображаемого посредством процесса отображения информации о плане движения, согласно четвертому варианту осуществления, и состояние, в котором расстояние между транспортным средством MV (транспортное средство-носитель) и пешеходным переходом CW как прогнозируемой точкой перехода составляет расстояние La.
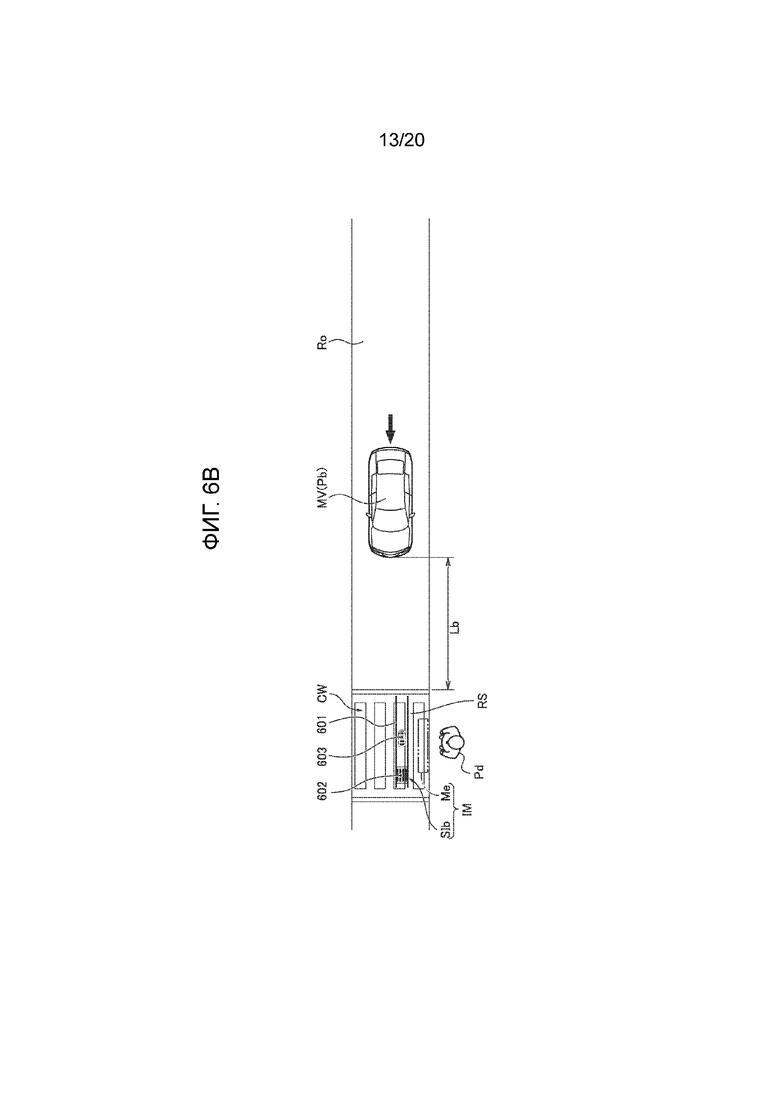
Фиг. 6B - вид сверху, иллюстрирующий один пример изображения IM, отображаемого посредством процесса отображения информации о плане движения согласно четвертому варианту осуществления, и состояние, в котором расстояние между транспортным средством MV (транспортное средство-носитель) и пешеходным переходом CW как прогнозируемой точкой перехода составляет расстояние Lb, которое меньше расстояния La.
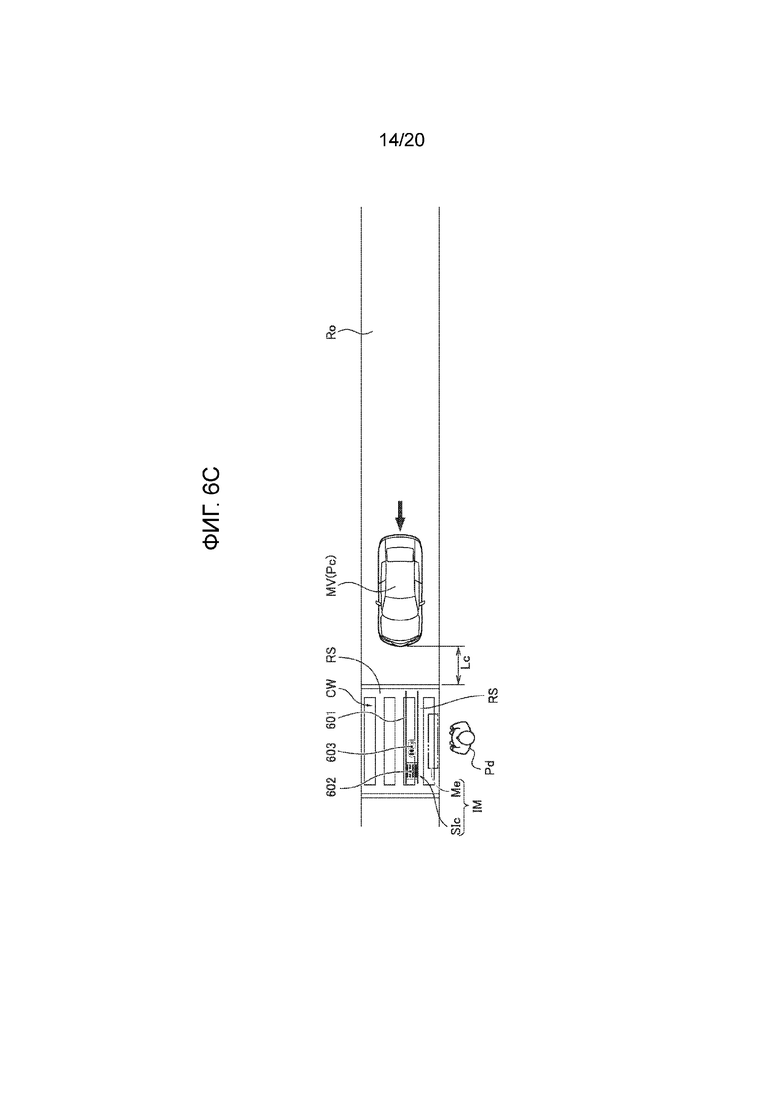
Фиг. 6C - вид сверху, иллюстрирующий один пример изображения IM, отображаемого посредством процесса отображения информации о плане движения согласно четвертому варианту осуществления, и состояние, в котором расстояние между транспортным средством MV (транспортное средство-носитель) и пешеходным переходом CW как прогнозируемой точкой перехода составляет расстояние Lc, которое меньше расстояния Lb.
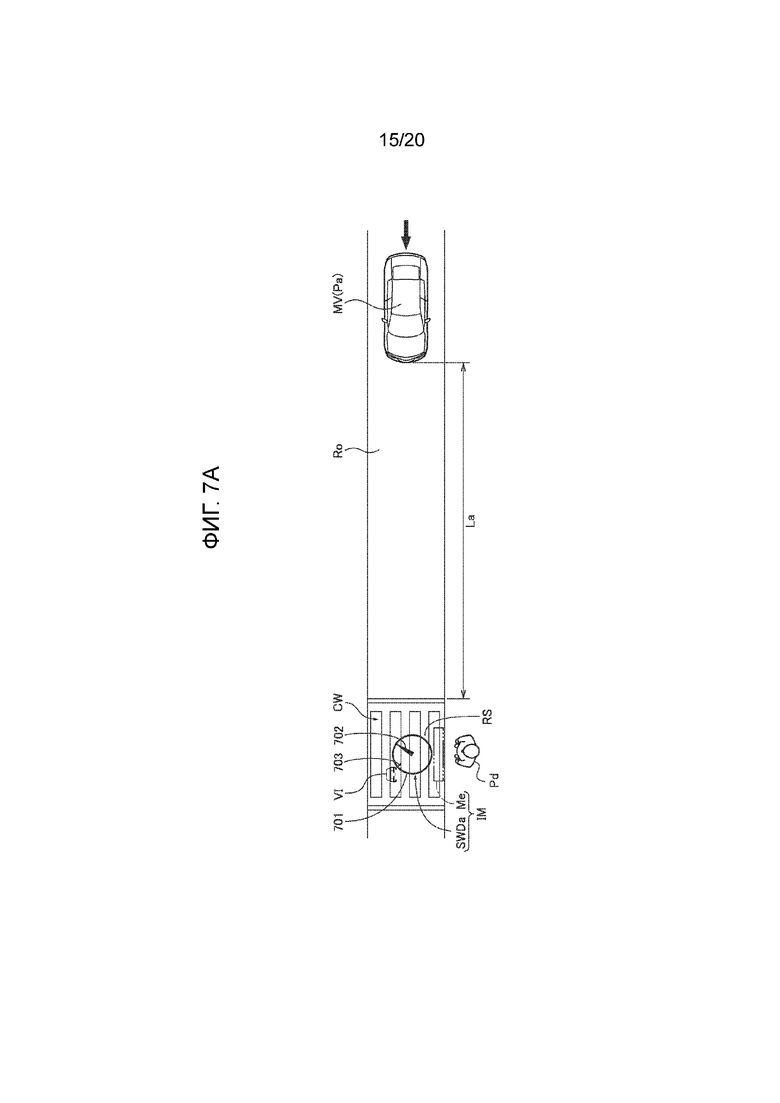
Фиг. 7A - вид сверху, иллюстрирующий один пример изображения IM, отображаемого посредством процесса отображения информации о плане движения согласно пятому варианту осуществления, и состояние, в котором расстояние между транспортным средством MV (транспортное средство-носитель) и пешеходным переходом CW как прогнозируемой точкой перехода составляет расстояние La.
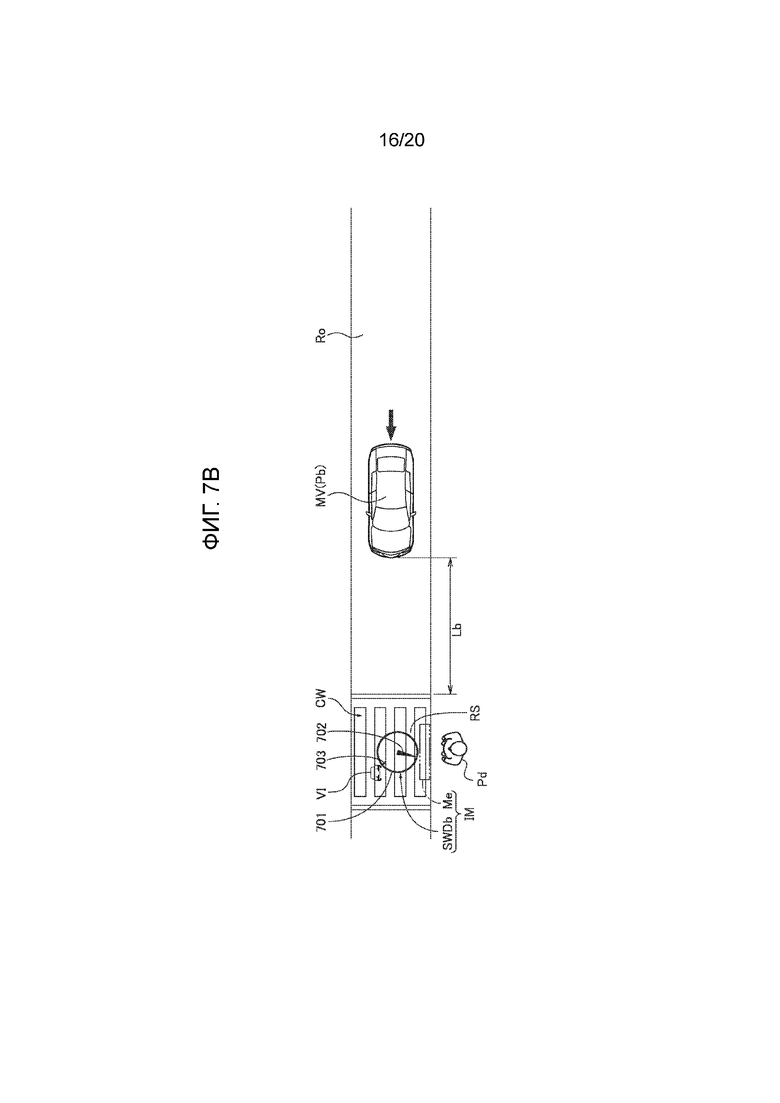
Фиг. 7B - вид сверху, иллюстрирующий один пример изображения IM, отображаемого посредством процесса отображения информации о плане движения, согласно пятому варианту осуществления, и состояние, в котором расстояние между транспортным средством MV (транспортное средство-носитель) и пешеходным переходом CW как прогнозируемой точкой перехода составляет расстояние Lb, которое меньше расстояния La.
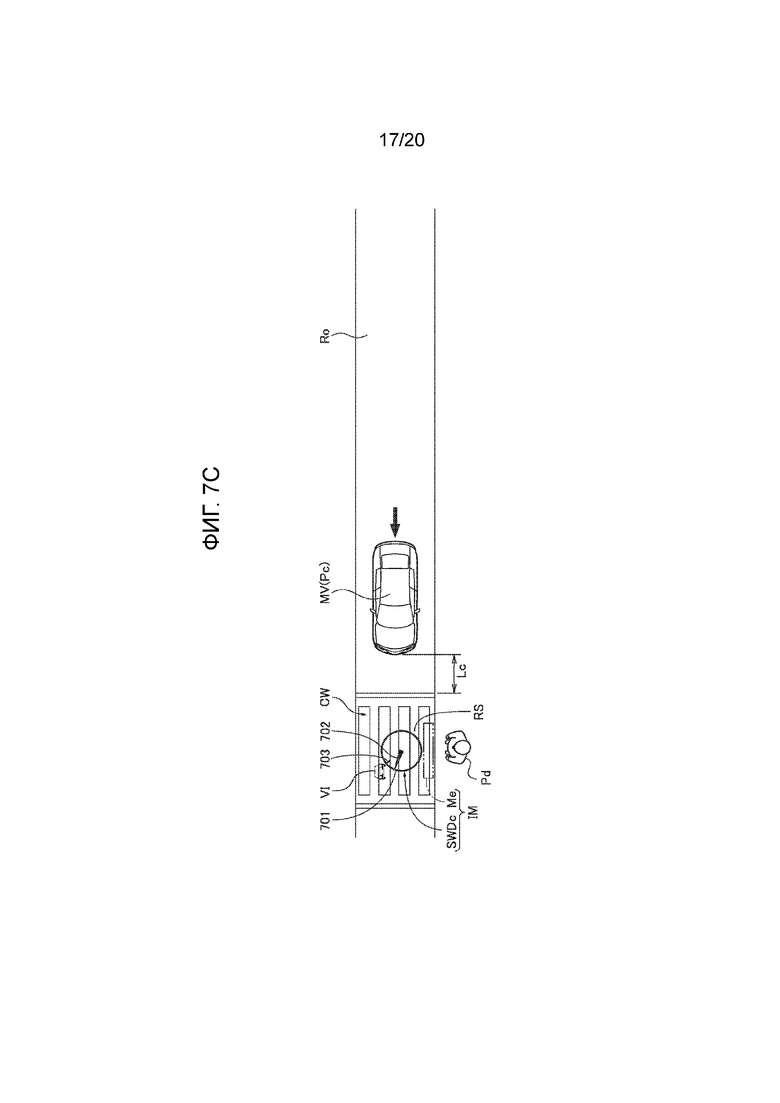
Фиг. 7C - вид сверху, иллюстрирующий один пример изображения IM, отображаемого посредством процесса отображения информации о плане движения, согласно пятому варианту осуществления, и состояние, в котором расстояние между транспортным средством MV (транспортное средство-носитель) и пешеходным переходом CW как прогнозируемой точкой перехода составляет расстояние Lc, которое меньше расстояния Lb.
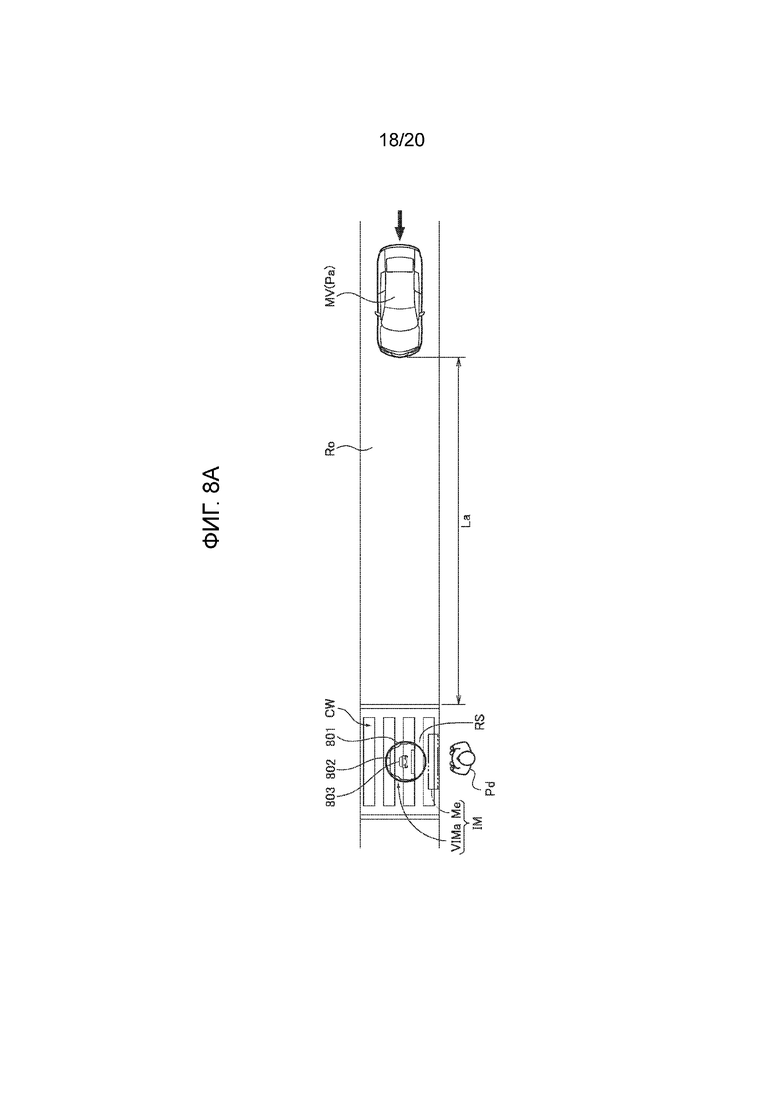
Фиг. 8A - вид сверху, иллюстрирующий один пример изображения IM, отображаемого посредством процесса отображения информации о плане движения, согласно шестому варианту осуществления, и состояние, в котором расстояние между транспортным средством MV (транспортное средство-носитель) и пешеходным переходом CW как прогнозируемой точкой перехода составляет расстояние La.
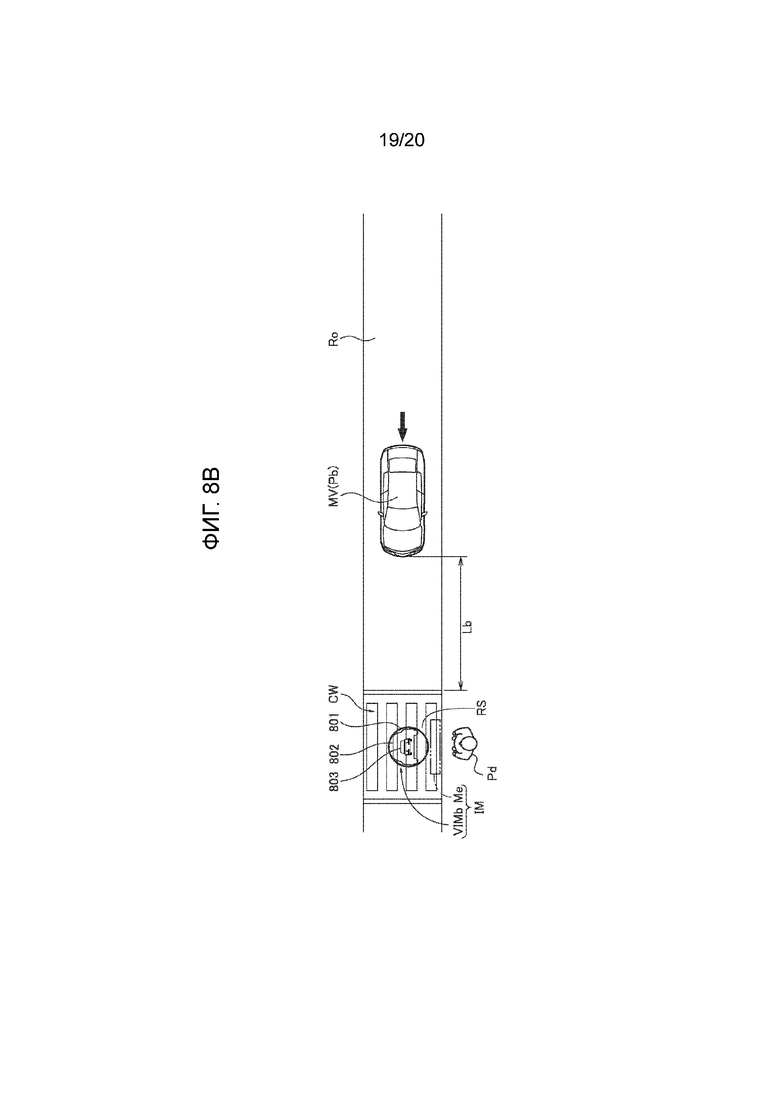
Фиг. 8B - вид сверху, иллюстрирующий один пример изображения IM, отображаемого посредством процесса отображения информации о плане движения, согласно шестому варианту осуществления, и состояние, в котором расстояние между транспортным средством MV (транспортное средство-носитель) и пешеходным переходом CW как прогнозируемой точкой перехода составляет расстояние Lb, которое меньше расстояния La.
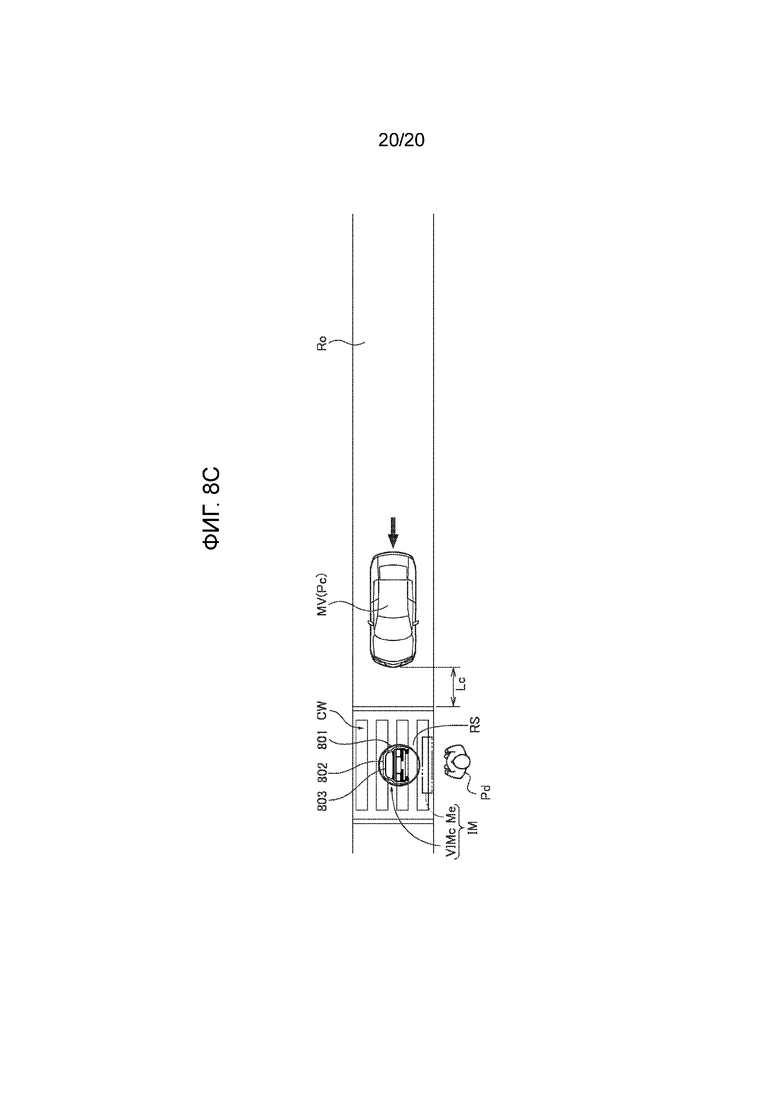
Фиг. 8C - вид сверху, иллюстрирующий один пример изображения IM, отображаемого посредством процесса отображения информации о плане движения согласно шестому варианту осуществления, и состояние, в котором расстояние между транспортным средством MV (транспортное средство-носитель) и пешеходным переходом CW как прогнозируемой точкой перехода составляет расстояние Lc, которое меньше расстояния Lb.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
[0009] Варианты осуществления для реализации способа отображения плана движения и устройства отображения плана движения согласно настоящему изобретению будут описаны ниже на основе чертежей.
[0010] (Первый вариант осуществления)
Способ отображения плана движения и устройство отображения плана движения согласно первому варианту осуществления применяются к автономно управляемому транспортному средству (один пример транспортного средства с помощью при вождении), в котором управление движением, торможением и углом рулевого управления осуществляется автоматически для движения по сформированному целевому маршруту движения, когда выбран режим автономного управления.
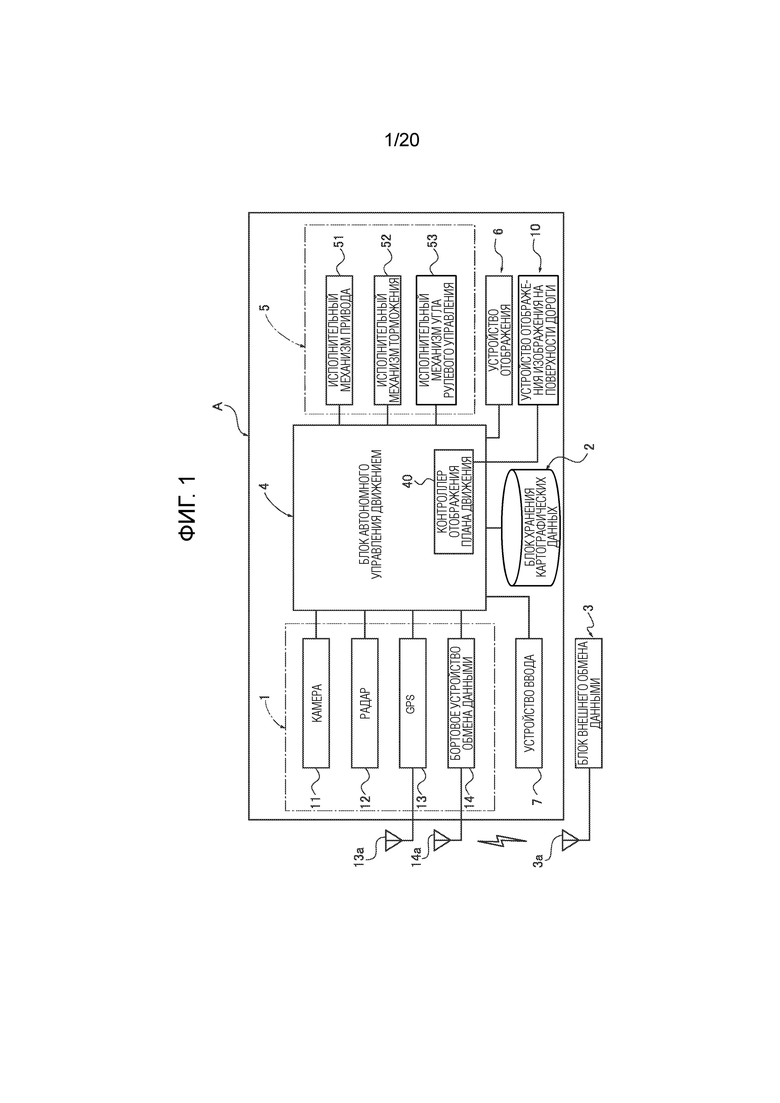
[0011] Фиг. 1 иллюстрирует систему A автономного управления движением, в которой применяется способ отображения плана движения и устройство отображения плана движения согласно первому варианту осуществления. Общая конфигурация системы будет описана ниже на основе Фиг. 1.
[0012] Система A автономного управления движением содержит бортовой датчик 1, блок 2 хранения картографических данных, блок 3 внешнего обмена данными, блок 4 автономного управления движением, исполнительный механизм 5, устройство 6 отображения и устройство 7 ввода.
[0013] Бортовой датчик 1 включает в себя камеру 11, радар 12, GPS 13 и бортовое устройство 14 обмена данными. Кроме того, информация от датчиков, полученная посредством бортового датчика 1, выводится в блок 4 автономного управления движением.
[0014] Камера 11 представляет собой датчик распознавания окружения, который реализует функцию получения с помощью данных изображения периферийной информации для транспортного средства, такой как полосы движения, движущиеся впереди транспортные средства, пешеходы Pd (см. Фиг. 3A) и тому подобное, в качестве функции, необходимая для автономного управления. Эта камера 11 выполнена, например, путем объединения передней камеры распознавания, задней камеры распознавания, правой камеры распознавания, левой камеры распознавания и тому подобного для транспортного средства-носителя. Транспортное средство-носитель - это транспортное средство, на котором установлена система A автономного управления движением, и относится к транспортному средству MV, описанному на Фиг. 3A, и т.п.
[0015] Из изображений с камеры можно обнаруживать объекты и полосы движения на пути движения транспортного средства-носителя и объекты за пределами пути движения транспортного средства-носителя (дорожные конструкции, движущиеся впереди транспортные средства, движущиеся сзади транспортные средства, встречные транспортные средства, окружающие транспортные средства, пешеходы Pd, велосипеды, двухколесные транспортные средства), путь движения транспортного средства-носителя (белые линии дорожной разметки, границы дороги, линии остановки, пешеходные переходы CW, дорожные знаки, ограничения скорости и т д.) и тому подобное.
[0016] Радар 12 является датчиком измерения расстояния, который реализует функцию обнаружения присутствия объекта, включая пешеходов Pd, вблизи транспортного средства-носителя и функцию обнаружения расстояния до объекта вблизи транспортного средства-носителя, в качестве функций, необходимых для автономного управления. Здесь «радар 12» - это общий термин, который включает в себя радары, использующие радиоволны, лидары, использующие оптическое излучение, и сонары, использующие ультразвуковые волны. Примеры радара 12, который можно использовать, включают в себя лазерный радар, радар миллиметрового диапазона, ультразвуковой радар, лазерный дальномер и тому подобное. Этот радар 12 выполнен, например, путем объединения переднего радара, заднего радара, правого радара, левого радара и тому подобного для транспортного средства-носителя.
[0017] Радар 12 обнаруживает положения объектов на пути движения транспортного средства-носителя и объектов за пределами пути перемещения транспортного средства-носителя (дорожные конструкции, движущиеся впереди транспортные средства, движущиеся сзади транспортные средства, встречные транспортные средства, окружающие транспортные средства, пешеходы, велосипеды, двухколесные транспортные средства), а также расстояние до каждого объекта. Если угол обзора недостаточен, радары могут быть добавлены по мере необходимости.
[0018] GPS 13 представляет собой датчик положения транспортного средства-носителя, который имеет антенну 13a GNSS и который обнаруживает положение транспортного средства-носителя (широту и долготу), когда транспортное средство остановлено или находится в движении, путём использования спутниковой связи. “GNSS” - это сокращение от «Глобальной спутниковой навигационной системы», а “GPS” - от «Глобальной системы определения местоположения».
[0019] Бортовое устройство 14 обмена данными представляет собой датчик внешних данных, который осуществляет беспроводную связь с блоком 3 внешнего обмена данными через антенны 3а, 14а приемопередатчика, чтобы таким образом получать извне информацию, которая не может быть получена транспортным средством-носителем.
[0020] Например, в случае устройства обмена данными, установленного на другом транспортном средстве, движущемся вблизи транспортного средства-носителя, блок 3 внешнего обмена данными осуществляет связь между транспортными средствами между транспортным средством-носителем и упомянутым другим транспортным средством. С помощью этой связи между транспортными средствами информация, необходимая для транспортного средства-носителя, может быть получена среди различных элементов информации, сохранённых в другом транспортном средстве, посредством запроса от бортового устройства 14 обмена данными.
[0021] Например, в случае устройства обмена данными, предусмотренного в инфраструктурном оборудовании, блок 3 внешнего обмена данными осуществляет связь с инфраструктурой между транспортным средством-носителем и инфраструктурным оборудованием. Посредством этой связи c инфраструктурой может быть получена информация, необходимая для транспортного средства-носителя, среди различных элементов информации, сохранённых в инфраструктурном оборудовании, посредством запроса от бортового устройства 14 обмена данными. Например, если имеется недостающая информация в картографических данных, сохранённых в блоке 2 хранения картографических данных, или информация, которая была обновлена из картографических данных, недостающая информация или обновленная информация может быть дополнена. Также возможно получить информацию о дорожном движении, такую как информация о заторах и информация об ограничениях движения, для целевого маршрута движения, по которому планируется движение транспортного средства-носителя.
[0021] Блок 2 хранения картографических данных состоит из бортовой памяти, в которой сохранены так называемые электронные картографические данные, в которых широта/долгота связаны с картографической информацией. Картографические данные, сохранённые в блоке 2 хранения картографических данных, являются картографическими данными высокой точности, имеющими уровень точности, при котором можно распознать по меньшей мере каждую из полос движения на дороге, которая имеет множество полос движения. Путём использования таких картографических данных высокой точности можно создать целевой маршрут движения, указывающий, по какой полосе движения из множества полос движения будет двигаться транспортное средство-носитель при автономном управлении. Затем, если положение транспортного средства-носителя, обнаруженное GPS 13, распознается как информация о местоположении транспортного средства-носителя, картографические данные высокой точности вокруг положения транспортного средства-носителя устанавливаются в блок 4 автономного управления движением.
[0023] Картографические данные высокой точности включают в себя информацию о дороге, связанную с каждой точкой, и информация о дороге определяется узлами и участками, которые соединяют узлы. Информация о дороге включает в себя информацию для идентификации дороги по местоположению и области дороги, тип дороги для каждой дороги, ширину полосы движения для каждой дороги и информацию о форме дороги. Для каждого фрагмента идентификационной информации каждого участка дороги информация о дороге сохраняется в связи с местоположением перекрестка, направлениями приближения к перекрестку, типом перекрестка и другой информацией, связанной с перекрестком. Для каждого элемента идентификационной информации каждого участка дороги информация о дороге сохраняется в связи с типом дороги, шириной полосы движения, формой дороги, возможностью сквозного движения, правилами приоритетности, возможен ли объезд (возможен ли въезд на смежную полосу движения), ограничением скорости, знаками и прочей информацией о дороге.
[0024] Блок 4 автономного управления движением имеет функцию объединения информации, вводимой из бортового датчика 1 и блока 2 хранения картографических данных, для формирования целевого маршрута движения, профиля целевой скорости транспортного средства (включая профиль ускорения и профиль замедления), и тому подобного. То есть целевой маршрут движения на уровне полосы движения из текущего положения до места назначения формируется на основании способа поиска предписанного маршрута, картографических данных высокой точности из блока 2 хранения картографических данных и тому подобного, и профиля целевой скорости транспортного средства и т.д. по целевому маршруту движения. Кроме того, если в результате распознавания области вокруг транспортного средства бортовым датчиком 1, когда транспортное средство-носитель остановлено или движется по целевому маршруту движения, определено, что автономное управление не может поддерживаться, целевой маршрут движения, профиль целевой скорости транспортного средства и тому подобное последовательно корректируются на основании результатов распознавания области вокруг транспортного средства-носителя.
[0025] Когда формируется целевой маршрут движения, блок 4 автономного управления движением вычисляет значение команды движения, значение команды торможения и значение команды угла рулевого управления таким образом, что транспортное средство движется по целевому маршруту движения, выводит вычисленные значения команд на каждый исполнительный механизм и побуждает транспортное средство-носитель двигаться и останавливаться по заданному маршруту движения. В частности, результат вычисления значения команды движения выводится на исполнительный механизм 51 привода, результат вычисления значения команды торможения выводится на исполнительный механизм 52 торможения, а результат вычисления значения команды угла рулевого управления выводится на исполнительный механизм 53 угла рулевого управления.
[0026] Исполнительный механизм 5 представляет собой управляющий исполнительный механизм, который побуждает транспортное средство двигаться по целевой траектории движения и останавливаться, и включает в себя исполнительный механизм 51 привода, исполнительный механизм 52 торможения и исполнительный механизм 53 угла рулевого управления.
[0027] Исполнительный механизм 51 привода принимает значения команды управления приводом, вводимые из блока 4 автономного управления движением, и управляет приводной силой, которая выводится на ведущие колеса. Примеры исполнительного механизма 51 привода, который может использоваться, включают в себя двигатель в случае транспортного средства с приводом от двигателя, двигатель и двигатель/генератор (работающий на мощности) в случае гибридного транспортного средства, а также двигатель/генератор (работающий на мощности) в случае электрического транспортного средства.
[0028] Исполнительный механизм 52 торможения принимает значения команды торможения, введенные из блока 4 автономного управления движением, и управляет силой торможения, которая выводится на ведущие колеса. Примеры исполнительного механизма 52 торможения, который может быть использован, включают в себя гидравлический усилитель, электрический усилитель, исполнительный механизм на основе давления тормозной жидкости, исполнительный механизм на основе тормозного мотора и двигатель/генератор (с регенерацией).
[0029] Исполнительный механизм 53 угла рулевого управления принимает значения команды угла рулевого управления, введенные из блока 4 автономного управления движением, и управляет углом рулевого управления для управляемых колес. Примеры исполнительного механизма 53 угла рулевого управления, который может быть использован, включают в себя мотор рулевого управления и тому подобное, предусмотренный в системе передачи усилия рулевого управления системы рулевого управления.
[0030] Устройство 6 отображения отображает на экране положение движущегося транспортного средства-носителя на карте для обеспечения водителю и пассажирам визуальной информации о местоположении транспортного средства-носителя, когда транспортное средство остановлено или движется при помощи автономного управления. Это устройство 6 отображения вводит информацию о целевом маршруте движения, информацию о положении транспортного средства-носителя, информацию о месте назначения и тому подобном, формируемую блоком 4 автономного управления движением, и отображает на экране дисплея карту, дороги, целевой маршрут движения (маршрут движения транспортного средства-носителя), местоположение транспортного средства-носителя, место назначения и тому подобное легко видимым образом.
[0031] Устройство 7 ввода выполняет различные операции ввода посредством операции водителя, для чего может использоваться, например, функция сенсорной панели устройства 6 отображения, а также другие рукоятки и переключатели. Примеры вводов, выполняемых водителем, включают в себя ввод информации, относящейся к месту назначения, и ввод настроек, таких как движение с постоянной скоростью и движение со следованием при автономном управлении, и тому подобное.
[0032] Кроме того, блок 4 автономного управления движением системы A автономного управления движением включает в себя контроллер 40 отображения плана движения и выполняет управление отображением информации плана движения для отображения изображения информации, относящейся к плану движения, дополнительно описанной ниже, на поверхности RS дороги (см. фиг. 3A) с использованием устройства 10 отображения изображения на поверхности дороги.
[0033] Устройство 10 отображения изображения на поверхности дороги предусмотрено в передней или верхней части транспортного средства MV и излучает видимый свет на поверхность RS дороги перед транспортным средством-носителем (например, на расстоянии от нескольких десятков до нескольких сотен метров впереди), таким образом отображая изображение IM, включающее в себя движущиеся изображения букв, диаграмм и тому подобное (см. фиг. 3A). Примеры устройства 10 отображения изображения на поверхности дороги, которое может быть использовано, включают в себя устройства, которые излучают и отображают лазерное излучение, или устройства, которые увеличивают и проецируют изображение или видео, такие как так называемое проекционное устройство. Кроме того, устройство 10 отображения изображения на поверхности дороги расположено на высоте земли, полученной заранее экспериментальным путём, исходя из наибольшего расстояния, на котором желательно отображать изображение путем излучения света на поверхность RS дороги.
[0034] Затем информация, относящаяся к плану движения, которая должна отображаться на поверхности RS дороги в первом варианте осуществления, включает в себя необходимое время Tra для прибытия, которое является временем, необходимым транспортному средству-носителю, чтобы достичь положения, в котором должно отображаться изображение IM, и сообщение, указывающее, намерено ли транспортное средство-носитель остановиться. Здесь планы движения составляются заранее в отношении того, какой тип управления должен быть выполнен от текущего положения транспортного средства-носителя (транспортного средства MV) до пешеходного перехода CW в качестве прогнозируемой точки перехода. Более конкретно, это планы, например, того, с какой скоростью или изменением скорости следует достичь пешеходного перехода CW, следует ли остановиться или проехать без остановки на пешеходном переходе CW и тому подобное. То есть транспортное средство, которое выполняет автономное движение, постоянно формирует план движения, относящийся к скорости транспортного средства, ускорению/замедлению и рулевому управлению таким образом, чтобы транспортное средство двигалось по заданному маршруту движения, созданному заранее. По этой причине план движения для достижения пешеходного перехода CW, который является вышеописанной предписанной точкой, также составляется заранее. Таким образом можно отображать информацию, относящуюся к плану движения. В дополнение к необходимому времени Tra для прибытия, описанному выше, информация, относящаяся к плану движения, которая может отображаться, включает в себя расстояние до пешеходного перехода CW, описанное ниже.
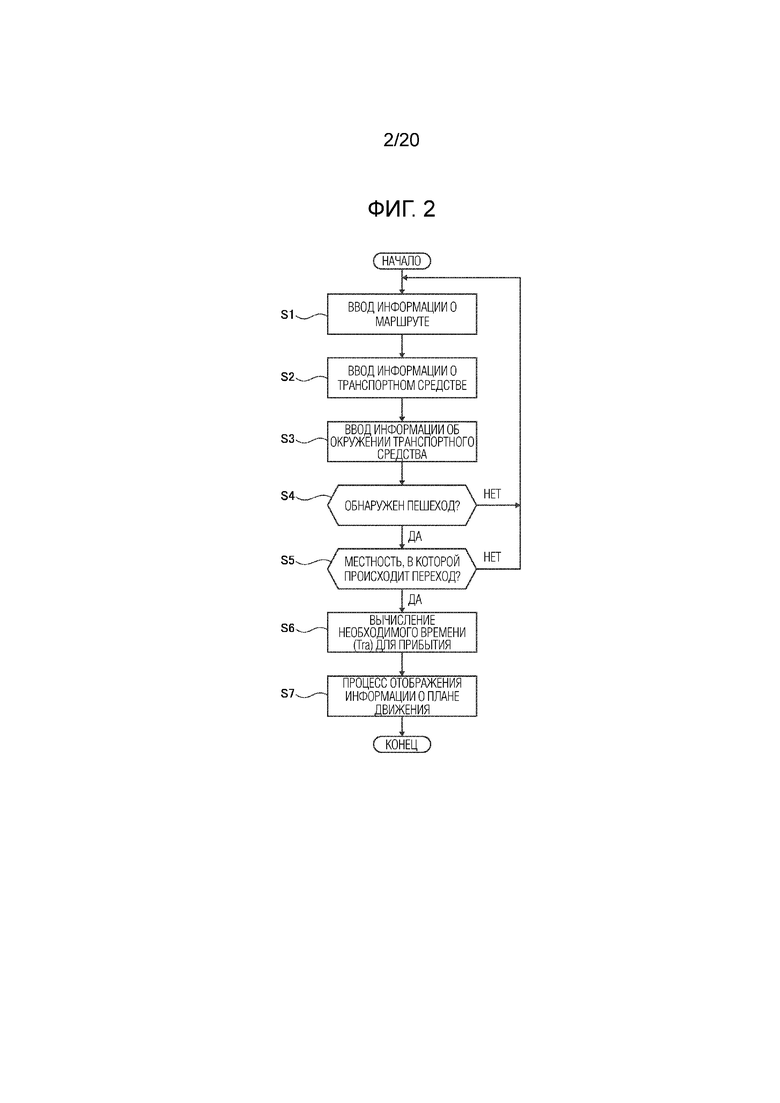
[0035] Поток обработки управления отображением плана движения контроллером 40 отображения плана движения будет описан ниже с обращением к блок-схеме на Фиг.2.
[0036] На этапах S1-S3 информация о маршруте, информация о транспортном средстве и информация об окружении транспортного средства и вводятся и получаются в качестве информации, относящейся к плану движения, и информации, относящейся к прогнозированию перехода. Информация о маршруте представляет собой информацию, относящуюся к маршруту движения транспортного средства-носителя, обеспечиваемую в блоке 4 автономного управления движением. В дополнение к запрашиваемому системой маршруту, заранее установленному в соответствии с вводом водителя в блок 4 автономного управления движением, в эту информацию маршрута также включается запрашиваемый водителем маршрут, соответствующий рулевому управлению водителя. Информация о транспортном средстве относится к движению транспортного средства-носителя, такому как угол рулевого управления и скорость транспортного средства для транспортного средства-носителя. Информация об окружении транспортного средства связана с областью вокруг транспортного средства, полученной от камеры 11, радара 12 и тому подобного. В частности, информация об окружении транспортного средства включает в себя информацию о дороге, относящуюся к окружению транспортного средства-носителя, информацию об объектах в окружении транспортного средства-носителя и информацию о кузове транспортного средства.
[0037] На этапе S4, к которому процесс переходит после ввода каждого элемента информации, определяется, был ли пешеход Pd обнаружен в окружении целевого маршрута движения (маршрута движения) транспортного средства-носителя. Обнаружение пешехода Pd выполняется на основании информации об окружении транспортного средства, и обнаружение выполняется по меньшей мере за пределами расстояния, на котором отображается изображение посредством устройства 10 отображения изображения на поверхности дороги посредством излучения света. Если пешеход Pd не обнаружен, процесс возвращается к этапу S1, а если пешеход Pd обнаружен, процесс переходит к следующему этапу S5.
[0038] На следующем этапе S5 определяется, относится ли точка обнаружения пешехода Pd вблизи планируемого маршрута движения транспортного средства-носителя или точка вблизи него к местности, в которой происходит переход. Затем, если это местность, в которой происходит переход, процесс переходит к этапу S6, а если это не местность, в которой происходит переход, процесс возвращается к этапу S1.
[0039] Здесь местность, в которой происходит переход, включает в себя местность, в которой имеется пешеходный переход CW (см. Фиг. 3A), и местность, в которой пересекаются дороги. Далее, определение того, является ли это местностью, в которой происходит переход, основано по меньшей мере на информации о положении транспортного средства-носителя и информации картографических данных, и включает в себя определение наличия или отсутствия пешеходного перехода CW или перекрестка в пределах величины заданного расстояния впереди на планируемом маршруте движения транспортного средства-носителя. В этом случае может быть добавлено определение на основании информации об окружении транспортного средства, полученной посредством бортового датчика 1, такого как камера 11.
[0040] Кроме того, в пределах величины заданного расстояния означает в пределах величины расстояния, на котором пешеход Pd (человек, планирующий переход), пытающийся пересечь пешеходный переход CW или перекресток, может быть обнаружен бортовым датчиком 1, и в пределах величины расстояния, на котором может отображаться изображение посредством устройства 10 отображения изображения на поверхности дороги, или в пределах величины расстояния, немного превышающего это расстояние. Более конкретно, оно находится в пределах величины расстояния, например, от нескольких десятков метров до 300 метров от транспортного средства-носителя.
[0041] Кроме того, определение в отношении местности, на которой происходит переход, или определение на этапе S4 для обнаружения пешехода Pd может включать в себя то, обращен ли пешеход Pd непосредственно к пешеходному переходу CW или к дороге Ro планируемого маршрута движения.
[0042] На этапе S6, к которому процесс переходит, если на этапе S5 определена местность, на которой происходит переход, вычисляется необходимое время Tra для прибытия, которое представляет собой время, необходимое транспортному средству-носителю для прибытия в прогнозируемую точку перехода, которая была определена как местность, на которой происходит переход, после чего процесс переходит к следующему этапу S7.
[0043] На этапе S7 выполняется процесс отображения информации о плане движения. В этом процессе отображения информации о плане движения устройство 10 отображения изображения на поверхности дороги отображает изображение IM, указывающее информацию, относящуюся к плану движения, на поверхности RS дороги (см. Фиг. 3A). Кроме того, поверхность RS дороги находится в конце поверхности дороги пешеходного перехода CW в зоне улицы рядом с тротуаром в направлении ширины, и находится вблизи ног пешехода, когда пешеход Pd, планирующий переход, стоит перед пешеходным переходом CW. Кроме того, в первом варианте осуществления информация, относящаяся к плану движения, отображаемому с использованием изображения IM, включает в себя сообщение, сообщающее о необходимом времени Tra для прибытия и о том факте, что транспортное средство остановится или продолжит движение в прогнозируемой точке перехода.
[0044] Теперь на основе фиг. 3A-3C будет описано изображение IM, которое должно отображаться на поверхности RS дороги. Изображение IM, отображаемое устройством 10 отображения изображения на поверхности дороги, включает в себя участки Ta-Tc отображения необходимого времени для прибытия для отображения необходимого времени Tra для прибытия с числом и единицей измерения секунд «с», и область Me отображения сообщения, которая является областью, в которой намерение остановиться и тому подобное отображается с помощью букв, предписанных знаков и тому подобного. Кроме того, изображение IM отображается с использованием цвета, такого как красный или желтый, который может быть легко распознан пешеходом Pd, даже если изображение накладывается на поверхность RS дороги или белые линии пешеходного перехода CW.
[0045] На Фиг. 3A-3C показан случай, в котором прогнозируемая точка перехода является пешеходным переходом CW, и на каждом чертеже показано различие между состояниями, в которых расстояние La-Lc между транспортным средством MV и пешеходным переходом CW постепенно сокращается из-за движения транспортного средства MV, которое является транспортным средством-носителем.
[0046] Таким образом, когда расстояние La-Lc между положением (Pa) - (Pc) транспортного средства MV (транспортное средство-носитель) и пешеходным переходом CW (прогнозируемая точка перехода) сокращается, необходимое время Tra для прибытия уменьшается, так что количество секунд, которое должно отображаться на участках Ta-Tc отображения необходимого времени для прибытия, также изменяется на меньшие значения. В этом случае, например, необходимое время Tra для прибытия отображается как неподвижное видео в единицах предписанного количества секунд (например, в единицах одной секунды). Здесь неподвижное видео относится к изображению, в котором само изображение неподвижно, но кажется движущимся изображением из-за того, что отображение изменяется с шагом в предписанный период времени. То есть, хотя изображение «12 с», отображаемое на участке Ta отображения необходимого времени для прибытия на Фиг. 3A, само по себе не движется, как показано на Фиг. 3A-3C, оно выглядит как движущееся изображение, на котором отображение изменяется от «12 с» до «1 с» с шагом в одну секунду.
[0047] Кроме того, блок 4 автономного управления движением обнаруживает наличие или отсутствие светофора на пешеходном переходе CW, и, если сигнал светофора отсутствует, в качестве плана движения формируется план движения для остановки перед пешеходным переходом CW. В таком случае контроллер 40 отображения плана движения отображает в области Me отображения сообщений сообщение о том, что транспортное средство-носитель остановится, посредством неподвижного изображения или движущегося изображения. То есть сообщение может отображаться посредством неподвижного изображения или может отображаться посредством движущегося изображения, которое многократно отображает сообщение, движущееся, например, в горизонтальном направлении (например, слева направо), как это видит пешеход Pd.
[0048] Кроме того, если светофор установлен на пешеходном переходе CW, если сигнал светофора по отношению к транспортному средству MV является сигналом остановки (красный сигнал светофора), формируется план движения для остановки перед пешеходным переходом CW в качестве плана движения таким же образом, как описано выше, и отображается сообщение, указывающее на остановку. С другой стороны, если сигнал светофора по отношению к транспортному средству MV является сигналом движения (зеленый сигнал светофора), блок 4 автономного управления движением формирует план движения для проезда пешеходного перехода CW. В этом случае контроллер 40 отображения плана движения отображает сообщение, указывающее в области Me отображения сообщений, что транспортное средство продолжит движение. В качестве альтернативы, в таком случае нет необходимости отображать область Me отображения сообщений.
[0049] Соответственно, пешеход Pd, который намеревается перейти, может смотреть на отображение участков Ta-Tc отображения необходимого времени для прибытия в изображении IM, отображаемом на поверхности RS дороги в конце пешеходного перехода CW у ног пешехода, и может визуально определить время, необходимое транспортному средству MV для достижения пешеходного перехода CW (необходимое время Tra для прибытия). Кроме того, глядя на отображение в области Me отображения сообщений, можно узнать, намеревается ли транспортное средство MV остановиться на пешеходном переходе CW. Кроме того, поскольку изображение IM отображается на поверхности RS дороги, изображение IM может легко попасть в поле зрения пешехода Pd, даже если пешеход смотрит вниз на мобильный телефон или тому подобное.
[0050] Эффекты способа отображения плана движения и устройства отображения плана движения согласно первому варианту осуществления перечислены ниже.
[0051] (1) Способ отображения плана движения, выполняемый системой A автономного управления движением согласно первому варианту осуществления, выполняется посредством управления бортовым устройством 10 отображения изображения на поверхности дороги, которое может отображать изображение IM на поверхности RS дороги, посредством контроллера 40 отображения плана движения для отображения информации, относящейся к плану движения транспортного средства-носителя, на поверхности RS дороги, содержащий этапы (S1-S3) получения информации, относящейся к плану движения транспортного средства-носителя, и информации, относящейся к прогнозированию перехода пешехода Pd, этапы (S4, S5) получения прогнозируемой точки перехода, в которой прогнозируется переход пешехода Pd на планируемом маршруте движения транспортного средства-носителя на основании полученной информации, и этап (S7) отображения изображения информации, относящейся к плану движения транспортного средства-носителя, от текущего положения (Pa, Pb, Pc) транспортного средства-носителя до пешеходного перехода CW в качестве прогнозируемой точки перехода, на поверхности RS дороги пешеходного перехода CW как прогнозируемой точки перехода посредством устройства 10 отображения изображения на поверхности дороги.
Таким образом можно обеспечить пешеходу Pd, пытающемуся пересечь пешеходный переход CW, информацию, относящуюся к плану движения, необходимую для определения, следует ли переходить дорогу, посредством изображения IM. Затем пешеход Pd может видеть изображение IM, отображаемое на поверхности RS дороги, и узнавать план движения, такой как необходимое время Tra для прибытия транспортного средства MV и наличие намерения остановиться таким образом, что возможно точное определение для выполнения беспрепятственного перехода.
[0052] В частности, в транспортном средстве MV, которое движется посредством системы A автономного управления движением, поскольку движение выполняется на основании плана движения, который заранее формируется блоком 4 автономного управления движением, можно обеспечить информацию, относящуюся к плану движения с высокой точностью. Кроме того, в транспортном средстве MV, которое осуществляет автономное движение, существует вероятность того, что водитель не смотрит в направлении движения транспортного средства MV; в этом случае пешеходу Pd становится трудно осуществлять зрительную связь с водителем, то есть устанавливать так называемый зрительный контакт. По этой причине становится более эффективным отображение плана движения посредством изображения IM.
[0053] (2) Способ отображения плана движения, который выполняется системой A автономного управления движением согласно первому варианту осуществления, дополнительно содержит этап (S6) получения необходимого времени для прибытия, которое является временем, необходимым транспортному средству-носителю, чтобы достичь пешеходного перехода CW как прогнозируемой точки перехода из текущего положения (Pa, Pb, Pc) на основании полученной информации, при этом информация, относящаяся к плану движения на этапе (S7) отображения изображения на поверхности RS дороги включает в себя необходимое время Tra для прибытия. То есть в изображении IM необходимое время Tra для прибытия отображается с использованием чисел на участках Ta-Tc отображения необходимого времени для прибытия.
Соответственно, можно представить пешеходу Pd, пытающемуся пересечь пешеходный переход CW, необходимое время Tra для прибытия, которое является временем, необходимым транспортному средству MV для достижения прогнозируемой точки перехода (пешеходного перехода CW), необходимое для определения того, следует ли переходить дорогу. В результате пешеход Pd может более точно выполнять определение в отношении выполнения перехода.
[0054] (3) Способ отображения плана движения, который выполняется системой A автономного управления движением согласно варианту осуществления, таков, что на этапе (S7) отображения изображения на поверхности RS дороги изображение отображается с использованием движущегося изображения, показывающего изменения в плане движения по мере движения транспортного средства-носителя. То есть время, которое отображается на участках Ta-Tc отображения необходимого времени для прибытия, изменяется в соответствии с необходимым временем Tra для прибытия, которое представляет собой время, необходимое для достижения пешеходного перехода CW, изменяющееся от момента к моменту вследствие движения транспортного средства МВ.
Соответственно, появляется возможность точного отображения плана движения, который меняется от момента к моменту. В результате для пешехода Pd, пытающегося пересечь пешеходный переход CW, становится возможным точно узнать необходимое время Tra для прибытия в качестве плана движения, глядя на изображение IM. В частности, если пешеход Pd не смотрит на изображение IM в момент времени по Фиг. 3A, и пешеход Pd смотрит на изображение IM в момент времени по Фиг. 3B, можно узнать необходимое время Tra для прибытия в момент времени по Фиг. 3B.
[0055] (4) Система A автономного управления движением согласно первому варианту осуществления содержит устройство 10 отображения изображения на поверхности дороги, которое установлено на транспортном средстве-носителе и которое может отображать изображение IM на поверхности RS дороги, контроллер 40 отображения плана движения, который управляет операцией отображения устройства 10 отображения изображения на поверхности дороги, элемент, который выполняет процесс по этапам S1-S3, в качестве блока получения информации, который получает информацию, относящуюся к плану движения транспортного средства-носителя, и информацию, относящуюся к прогнозированию выполнения перехода пешеходом, и элемент, который выполняет процесс по этапу S5, в качестве блока прогнозирования точки перехода, который получает прогнозируемую точку перехода, в которой прогнозируется переход пешехода Pd на целевом маршруте движения (маршруте движения) транспортного средства-носителя. Затем контроллер 40 отображения плана движения управляет операцией отображения устройства 10 отображения изображения на поверхности дороги для отображения изображения информации, относящейся к плану движения транспортного средства-носителя, на поверхности RS дороги на пешеходном переходе CW в качестве прогнозируемой точки перехода, начиная с текущего положения (Pa-Pc) транспортного средства-носителя по отношению к пешеходному переходу CW в качестве прогнозируемой точки перехода.
Следовательно, как описано в пункте (1) выше, посредством изображения IM можно обеспечить пешеходу Pd информацию, относящуюся к плану движения, которая является информацией, необходимой для определения, следует ли переходить дорогу. Затем пешеход Pd, пытающийся пересечь пешеходный переход CW, может посмотреть на изображение IM, отображаемое на поверхности RS дороги, и узнать план движения, например, необходимое время Tra для прибытия транспортного средства MV и наличие или отсутствие намерения остановиться, чтобы можно было выполнить точное определение в отношении выполнения перехода.
[0056] (Другие варианты осуществления)
Ниже будут описаны другие варианты осуществления. Другие варианты осуществления иллюстрируют модифицированные примеры изображения IM, которое должно отображаться с помощью устройства 10 отображения изображения на поверхности дороги; основные конфигурации системы A автономного управления движением являются такими же, как и в первом варианте осуществления.
Фиг. 4A-4C иллюстрируют изображение IM, которое должно отображаться посредством процесса отображения информации о плане движения согласно второму варианту осуществления, и изменения в нем; во втором варианте осуществления в качестве изображения IM для отображения необходимого времени Tra для прибытия посредством движущегося изображения используются участки PCa-PCc отображения круговой диаграммы.
[0058] Участки PCa-PCc отображения круговой диаграммы включают в себя участок 401 круглой внешней рамки, область 402 отображения необходимого времени для прибытия, указывающую необходимое время Tra для прибытия, и область 403 отображения прошедшего времени, указывающую время, прошедшее с момента начала отображения изображения IM. Участок 401 внешней рамки и область 402 отображения необходимого времени для прибытия отображаются с использованием цветов, таких как красный или желтый, которые можно легко распознать на поверхности RS дороги или белых линиях пешеходного перехода CW. С другой стороны, область 403 отображения прошедшего времени делается бесцветной или отображается белым, серым или тому подобным цветом, что трудно отличить от белых линий и поверхности RS дороги. В этом случае также осуществляется отображение в области Me отображения сообщений наличия или отсутствия намерения транспортного средства MV (транспортного средства-носителя) остановиться.
[0059] Соответственно, на изображении IM показано движущееся изображение, в котором, когда транспортное средство MV приближается к пешеходному переходу CW и необходимое время Tra для прибытия уменьшается, доля, занимаемая областью 402 отображения необходимого времени для прибытия и вписанный угол постепенно уменьшается, и доля, занимаемая областью 403 отображения прошедшего времени и направлением по окружности, постепенно увеличивается.
[0060] Хотя область 402 отображения необходимого времени для прибытия отображает необходимое время Tra для прибытия, может отображаться расстояние La-Lc между пешеходным переходом CW (прогнозируемой точкой перехода) и транспортным средством MV . В этом случае расстояние La-Lc получается вместо вычисления необходимого времени Tra для прибытия на этапе S6, чтобы таким образом отображать расстояние La-Lc на этапе S7.
[0061] Как описано выше, даже во втором варианте осуществления пешеход Pd может точно визуально установить с помощью изображения IM наличие или отсутствие намерения остановиться, и необходимое время Tra для прибытия, которое является необходимым временем для достижения транспортным средством MV пешеходного перехода CW, который необходимо пересечь. Таким образом, даже во втором варианте осуществления можно получить эффекты (1) - (4), описанные в первом варианте осуществления.
[0062] Фиг. 5A-5C иллюстрируют изображение IM, которое должно отображаться посредством процесса отображения информации о плане движения согласно третьему варианту осуществления, и изменения в нем; в третьем варианте осуществления в качестве изображения IM для отображения необходимого времени Tra для прибытия посредством движущегося изображения используются участки BGa-BGc отображения гистограммы.
[0063] Эти участки BGa-BGc отображения гистограммы включают в себя прямоугольный участок 501 внешней рамки, область 502 отображения необходимого времени для прибытия, указывающую необходимое время Tra для прибытия, и область 503 отображения прошедшего времени, указывающую время, прошедшее с момента начала отображения изображения IM. Участок 501 внешней рамки и область 502 отображения необходимого времени для прибытия отображаются с использованием цветов, таких как красный или желтый, которые можно легко распознать на поверхности RS дороги или белых линиях пешеходного перехода CW. С другой стороны, область 503 отображения прошедшего времени сделана бесцветной или отображается в белом, сером или тому подобном цвете, который трудно отличить от белых линий и поверхности RS дороги. В этом случае также осуществляется отображение в области Me отображения сообщений наличия или отсутствия намерения транспортного средства MV (транспортного средства-носителя) остановиться.
[0064] Соответственно, на изображении IM показано движущееся изображение, на котором, когда транспортное средство MV приближается к пешеходному переходу CW и необходимое время Tra для прибытия уменьшается, доля, занимаемая областью 502 отображения необходимого времени для прибытия, и длина постепенно уменьшаются, и доля, занимаемая областью 503 отображения прошедшего времени, и ее длина постепенно увеличиваются.
[0065] Как описано выше, даже в третьем варианте осуществления пешеход Pd может точно визуально установить посредством изображения IM наличие или отсутствие намерения остановиться, а также необходимое время Tra для прибытия, которое является необходимым временем для достижения транспортным средством MV пешеходного перехода CW, который необходимо пересечь. Таким образом, даже в третьем варианте осуществления можно получить эффекты от (1) до (4), описанные в первом варианте осуществления.
[0066] Фиг. 6A-6C иллюстрируют изображение IM, которое должно отображаться посредством процесса отображения информации о плане движения согласно четвертому варианту осуществления, и изменения в нем; в четвертом варианте осуществления в качестве изображения IM для отображения информации, относящейся к плану движения, с использованием движущегося изображения используются участки SIa-SIc отображения схематичного изображения.
[0067] Эти участки SIa-SIc отображения схематичного изображения схематично показывают взаимосвязь между дорогой Ro, пешеходным переходом CW и транспортным средством MV (транспортное средство-носитель). Таким образом, участки SIa-SIc отображения схематичного изображения включают в себя участок 601 отображения дороги, представляющий дорогу Ro, участок 602 отображения пешеходного перехода, представляющий пешеходный переход CW, и участок 603 отображения транспортного средства, представляющий транспортное средство MV. Кроме того, участок 601 отображения дороги, участок 602 отображения пешеходного перехода и участок 603 отображения транспортного средства отображают фактическое взаимное расположение между дорогой Ro, пешеходным переходом CW и транспортным средством MV (транспортное средство-носитель) в виде уменьшенного изображения. Каждый из участков 601, 602, 603 отображения отображается с использованием цветов, таких как красный или желтый, которые можно легко распознать на поверхности RS дороги или белых линиях пешеходного перехода CW, а другие участки сделаны бесцветными или отображаются белым, серым и тому подобным цветом, который трудно отличить от белых линий и поверхности RS дороги.
[0068] Таким образом, интервал между участком 602 отображения пешеходного перехода и участком 603 отображения транспортного средства может отображаться в соответствии с необходимым временем Tra для прибытия таким же образом, как и во втором и третьем вариантах осуществления, описанных выше, или может быть показан в соответствии с расстоянием La-Lc между пешеходным переходом CW и транспортным средством MV (транспортное средство-носитель). Если он показывается таким образом в соответствии с расстоянием La-Lc, на этапе S6 выполняется процесс, в котором получается расстояние La-Lc между пешеходным переходом CW и транспортным средством MV (транспортное средство-носитель), и интервал между участком 602 отображения пешеходного перехода и участком 603 отображения транспортного средства определяются на основании этих расстояний La-Lc. В качестве альтернативы, таким же образом, как на этапе S6 по первому варианту осуществления, может быть получено необходимое время Tra для прибытия, и интервал между участком 602 отображения пешеходного перехода и участком 603 отображения транспортного средства может быть определен на основании этого необходимого времени Tra для прибытия. Кроме того, отображение в области Me отображения сообщения наличия или отсутствия намерения остановиться также выполняется в этом четвертом варианте осуществления.
[0069] Соответственно, в четвертом варианте осуществления изображение IM отображается как движущееся изображение, в котором интервал между участком 602 отображения пешеходного перехода и участком 603 отображения транспортного средства сокращается, когда транспортное средство MV приближается к пешеходному переходу CW.
[0070] В результате пешеход Pd может точно визуально установить наличие или отсутствие намерения остановиться, необходимое время Tra для прибытия или расстояние La-Lc между транспортным средством MV и пешеходным переходом CW, который предстоит пересечь. Таким образом, даже в четвертом варианте осуществления можно получить эффекты (1) - (4), описанные в первом варианте осуществления.
[0071] Фиг. 7A-7C иллюстрируют изображение IM, которое должно отображаться посредством процесса отображения информации о плане движения в пятом варианте осуществления, и изменения в нем; в пятом варианте осуществления в качестве IM изображения для отображения необходимого времени Tra для прибытия посредством движущегося изображения используются участки SWDa-SWDc отображения секундомера.
[0072] Эти участки SWDa-SWDc отображения секундомера включают в себя круговую внешнюю периферийную рамку 701, участок 702 стрелки, соответствующий секундной стрелке, участок VI изображения транспортного средства, представляющий прибытие транспортного средства, и опорный участок 703, который выступает внутрь от внешней периферийной рамки 701.
[0073] Внешняя периферийная рамка 701, участок 702 стрелки и опорный участок 703 и участок VI изображения транспортного средства отображаются с использованием цветов, таких как красный или желтый, которые можно легко распознать на поверхности RS дороги или белых линиях пешеходного перехода CW. С другой стороны, другие участки сделаны бесцветными или отображаются в белом, сером или тому подобном цвете, что трудно отличить от белых линий и поверхности RS дороги. Кроме того, необходимое время Tra для прибытия отображается посредством интервала по часовой стрелке между участком 702 стрелки и опорным участком 703. В этом случае в области Me отображения сообщений также осуществляется отображение наличия или отсутствия намерения транспортного средства MV (транспортное средство-носитель) остановиться.
[0074] Соответственно, в пятом варианте осуществления, как показано на Фиг. 7A-7C, изображение IM отображается в виде движущегося изображения, в котором участок 702 стрелки постепенно приближается к опорному участку 703, когда транспортное средство MV приближается к пешеходному переходу CW.
[0075] Таким образом пешеход Pd может точно визуально установить наличие или отсутствие намерения остановиться и необходимое время Tra для прибытия, которое представляет собой время, необходимое транспортному средству MV для достижения пешеходного перехода CW, который предстоит пересечь. Таким образом, даже в пятом варианте осуществления можно получить эффекты (1) - (4), описанные в первом варианте осуществления.
[0076] На фиг. 8A-8C показано изображение IM, которое должно отображаться посредством процесса отображения информации о плане движения согласно шестому варианту осуществления, и изменения в нем. Этот шестой вариант осуществления представляет собой пример, в котором изображение IM отображается как движущееся изображение расстояния La-Lc или необходимого времени Tra для прибытия с использованием участков VIMa-VIMc отображения изображения транспортного средства.
[0077] Участки VIMa-VIMc отображения изображения транспортного средства включают в себя круговую внешнюю периферийную рамку 801, опорное изображение 802 транспортного средства, отображаемое в контакте с внутренней периферией внешней периферийной рамки 801, и изображение 803 транспортного средства, отображаемое внутри опорного изображения 802 транспортного средства. Тогда различие в размерах опорного изображения 802 транспортного средства и изображения 803 транспортного средства представляет необходимое время Tra для прибытия или расстояние La-Lc между пешеходным переходом CW и приближающимся транспортным средством MV.
[0078] Участки VIMa-VIMc отображения изображения транспортного средства, внешняя периферийная рамка 801, опорное изображение 802 транспортного средства и изображение 803 транспортного средства отображаются с использованием цветов, таких как красный или желтый, которые можно легко распознать на поверхности RS дороги или белых линиях пешеходного перехода CW. С другой стороны, другие участки выполнены бесцветными или отображаются в белом, сером или тому подобном цвете, который трудно отличить от белых линий и поверхности RS дороги. В этом случае также осуществляется отображение в области Me отображения сообщений наличия или отсутствия намерения транспортного средства MV (транспортное средство-носитель) остановиться.
[0079] Как показано на фиг. 8A-8C, в этом шестом варианте осуществления изображение IM изменяется таким образом, что размер изображения 803 транспортного средства постепенно приближается к размеру опорного изображения 802 транспортного средства, когда транспортное средство MV приближается к пешеходному переходу CW из текущего положения. Кроме того, в области Me отображения сообщений отображается наличие или отсутствие намерения транспортного средства MV остановиться.
[0080] Соответственно, пешеход Pd может установить наличие или отсутствие намерения транспортного средства MV остановиться на пешеходном переходе CW, расстояние La-Lc до транспортного средства MV или необходимое время Tra для прибытия, что является необходимой информацией для определения того, следует ли переходить дорогу на пешеходном переходе CW. Затем на основании информации, полученной из изображения IM, пешеход Pd может точно определить, следует ли переходить пешеходный переход CW. Таким образом, даже в шестом варианте осуществления можно получить эффекты (1) - (4), описанные в первом варианте осуществления.
[0081] Способ отображения плана движения и устройство отображения плана движения согласно настоящему изобретению были описаны выше на основе вариантов осуществления. Однако конкретные конфигурации не ограничены этими вариантами осуществления, и могут быть выполнены различные изменения и дополнения к конструкции, не выходящие за рамки объема изобретения согласно каждому пункту формулы изобретения.
[0082] Например, в вариантах осуществления примеры были реализованы в системе A автономного управления движением, но изобретение может применяться в транспортных средствах, отличных от транспортных средств, которые осуществляют автономное движение. То есть изобретение может быть применено в устройстве помощи при вождении или любом другом транспортном средстве, которое может определять присутствие или отсутствие пешехода (человека, планирующего переход), а также определять маршрут движения транспортного средства-носителя посредством бортового датчика 1, блока 2 хранения картографических данных и тому подобного.
[0083] Кроме того, в вариантах осуществления в качестве прогнозируемой точки перехода была проиллюстрирована местность, имеющая пешеходный переход CW или перекресток, но это не налагает никаких ограничений. Например, в дополнение к пешеходному переходу CW и перекрестку, прогнозируемая точка перехода может быть определена, когда обнаружен пешеход, который имеет положение, указывающее на намерение перейти дорогу Ro.
[0084] Кроме того, в вариантах осуществления был представлен пример, в котором в качестве информации, относящейся к плану движения, отображается как расстояние La-Lc между транспортным средством-носителем и пешеходным переходом CW (прогнозируемой точкой перехода) или необходимое время Tra для прибытия, так и сообщение, указывающее на наличие или отсутствие намерения остановиться. Например, вместо этого может отображаться любое из необходимого времени Tra для прибытия, расстояния La-Lc и наличия или отсутствия намерения остановиться. Кроме того, если упомянутое сообщение отображается, в соответствии с ситуацией может отображаться и другое сообщение кроме намерения остановиться, например сообщение, запрещающее переход.
[0085] Кроме того, в вариантах осуществления был представлен пример, в котором область Me отображения сообщений размещена перед отображением информации, относящейся к необходимому времени для прибытия, которую видит пешеход Pd, но упомянутое положение не ограничено этим. Отображение информации, относящейся к необходимому времени для прибытия, может отображаться впереди или может располагаться параллельно слева и справа от отображения информации, относящейся к необходимому времени для прибытия.
[0086] Кроме того, в вариантах осуществления был представлен пример, в котором целевой маршрут движения, формируемый блоком автономного управления движением, используется в качестве маршрута движения, но это не налагает никаких ограничений; например, в устройстве помощи при вождении, в котором целевой маршрут движения не формируется, в качестве маршрута движения может использоваться прогнозируемый маршрут движения.
Изобретение относится к способу отображения плана движения. Способ отображения плана движения, в котором бортовое устройство отображения изображения на поверхности дороги, которое может отображать изображение на поверхности дороги, управляется контроллером отображения для отображения информации, относящейся к плану движения транспортного средства-носителя, на поверхности дороги, содержит этап, на котором получают информацию, относящуюся к плану движения транспортного средства-носителя, и информацию, относящуюся к прогнозированию выполнения перехода пешеходом, этап на котором получают прогнозируемую точку перехода, в которой прогнозируется выполнение перехода пешеходом, на маршруте движения транспортного средства-носителя на основании полученной информации. Способ также содержит этап на котором отображают изображение информации, относящейся к плану движения транспортного средства-носителя от текущего положения транспортного средства-носителя до прогнозируемой точки перехода на поверхности дороги в прогнозируемой точке перехода с использованием устройства отображения изображения на поверхности дороги. Достигается повышение безопасности пешеходов. 2 н. и 2 з.п. ф-лы, 20 ил.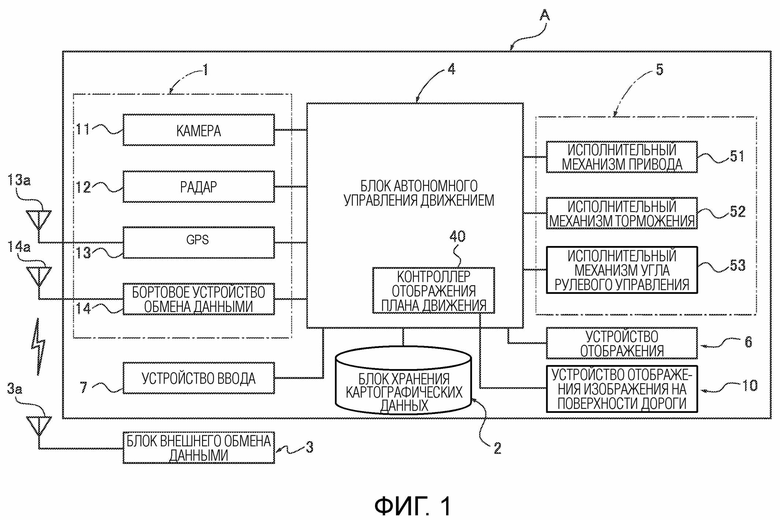
1. Способ отображения плана движения, в котором бортовое устройство отображения изображения на поверхности дороги, которое может отображать изображение на поверхности дороги, управляется контроллером отображения для отображения информации, относящейся к плану движения транспортного средства-носителя, на поверхности дороги, содержащий:
этап, на котором получают информацию, относящуюся к плану движения транспортного средства-носителя, и информацию, относящуюся к прогнозированию выполнения перехода пешеходом;
этап, на котором получают прогнозируемую точку перехода, в которой прогнозируется выполнение перехода пешеходом, на маршруте движения транспортного средства-носителя на основании полученной информации; и
этап, на котором отображают изображение информации, относящейся к плану движения транспортного средства-носителя от текущего положения транспортного средства-носителя до прогнозируемой точки перехода на поверхности дороги в прогнозируемой точке перехода с использованием устройства отображения изображения на поверхности дороги.
2. Способ отображения плана движения по п. 1, дополнительно содержащий
этап, на котором получают необходимое время для прибытия, которое представляет собой время, необходимое транспортному средству-носителю для достижения прогнозируемой точки перехода из текущего положения, на основании полученной информации, при этом
информация, относящаяся к плану движения, на этапе отображения изображения на поверхности дороги включает в себя упомянутое необходимое время для прибытия.
3. Способ отображения плана движения по п. 1 или 2, в котором
на этапе отображения изображения на поверхности дороги изображение отображается с использованием движущегося изображения, указывающего изменения в плане движения по мере движения транспортного средства-носителя.
4. Устройство отображения плана движения, содержащее:
устройство отображения изображения на поверхности дороги, которое установлено в транспортном средстве-носителе и может отображать изображение на поверхности дороги,
контроллер отображения, который управляет операцией отображения устройства отображения изображения на поверхности дороги,
блок получения информации, который получает информацию, относящуюся к плану движения транспортного средства-носителя и информацию, относящуюся к прогнозированию выполнения перехода пешеходом, и
блок прогнозирования точки перехода, который получает прогнозируемую точку перехода, в которой прогнозируется выполнение перехода пешеходом на маршруте движения транспортного средства-носителя,
при этом:
контроллер отображения управляет операцией отображения устройства отображения изображения на поверхности дороги для отображения изображения информации, относящейся к плану движения транспортного средства-носителя от текущего положения транспортного средства-носителя до прогнозируемой точки перехода на поверхности дороги в прогнозируемой точке пересечения.
| JP 2017226371 A, 28.12.2017 | |||
| Печь-кухня, могущая работать, как самостоятельно, так и в комбинации с разного рода нагревательными приборами | 1921 |
|
SU10A1 |
| US 2018208199 A1, 26.07.2018 | |||
| СИСТЕМА ДЛЯ ПЛАНИРОВАНИЯ МУЛЬТИМОДАЛЬНОГО МАРШРУТА ПОЕЗДКИ | 2014 |
|
RU2572279C1 |

