[Область техники, к которой относится изобретение]
[0001]
Настоящее изобретение относится к способу содействия движению и устройству содействия движению для транспортного средства.
[Уровень техники]
[0002]
В качестве устройства содействия движению такого типа известно устройство управления транспортным средством (патентный документ 1). Устройство управления транспортным средством функционирует, чтобы: классифицировать участников дорожного движения вокруг задействуемого транспортного средства в соответствии с атрибутом и состоянием на основе траекторий и положений участников дорожного движения и информации о задействуемом транспортном средстве и полосе движения; применять присутствующую (существующую) опасность, соответствующую классификации для каждого участника дорожного движения вокруг задействуемого транспортного средства, для генерирования карты присутствующих (существующих) опасностей на основе результатов классификации участников дорожного движения вокруг задействуемого транспортного средства и присутствующей опасности, предварительно изученной для каждой классификации; определять в качестве оптимального действия переход в состояние или остановку в состоянии, в котором большая величина вознаграждения получается посредством функции вознаграждения с использованием карты присутствующих опасностей среди состояний, соответствующих положениям задействуемого транспортного средства на множестве потенциально подходящих вариантов маршрутов; и управлять задействуемым транспортным средством в соответствии с определенным таким образом действием.
[Документ предшествующего уровня техники]
[Патентный Документ]
[0003]
[Патентный Документ 1] JP2019-106049A
[Сущность изобретения]
[Проблемы, решаемые изобретением]
[0004]
Однако в вышеупомянутом уровне техники оптимальное действие определяется с использованием карты присутствующих опасностей после обнаружения участников дорожного движения, таких как окружающие автомобили и пешеходы; следовательно, можно выполнить содействие движению для обнаруженных объектов, но невозможно выполнить содействие движению, соответствующее опасности, с которой ожидается столкновение. То есть вышеизложенный уровень техники имеет проблему, заключающуюся в том, что содействие движению не может быть выполнено для избегания любой опасности, которая может возникнуть.
[0005]
Задача, решаемая настоящим изобретением, состоит в том, чтобы предложить способ содействия движению и устройство содействия движению для транспортного средства, способные избежать любую опасность, которая может возникнуть.
[Средства для решения проблем]
[0006]
Настоящее изобретение включает в себя получение уровня опасности обнаруженного объекта, накопление полученного уровня опасности в связке с местоположением столкновения, в котором обнаружен объект, и использование накопленного уровня опасности для получения первичного оценочного уровня опасности объекта, с которым предсказывается столкновение в местоположении столкновения. Первичный оценочный уровень опасности ниже уровня опасности, полученного при обнаружении объекта. Вышеупомянутая проблема решается за счет получения вторичного оценочного уровня опасности, более низкого, чем первичный оценочный уровень опасности, с использованием предсказанного маневра движения другого транспортного средства, которое избегает опасность, обусловленную полученным первичным оценочным уровнем опасности, и при повторном движении в местоположении столкновения автономного управления движением транспортного средства с использованием полученного вторичного оценочного уровня опасности.
[Полезный эффект изобретения]
[0007]
В соответствии с настоящим изобретением уровень опасности может быть оценен до достижения местоположения столкновения, в котором произойдет столкновение с обнаруженным объектом, и, следовательно, можно выполнить, даже до обнаружения объекта, содействие движению, способное избежать любую опасность, которая может возникнуть.
[Краткое описание чертежей]
[0008]
Фиг.1 представляет собой блок-схему, иллюстрирующую способ содействия движению для транспортного средства согласно настоящему изобретению и систему содействия движению, включающую в себя устройство содействия движению.
Фиг.2 представляет собой блок-схему последовательности операций, иллюстрирующую процедуру обработки информации в системе содействия движению с Фиг.1.
Фиг.3 представляет собой блок-схему, иллюстрирующую вариант осуществления блока вычисления маршрута с Фиг.1.
Фиг.4 представляет собой блок-схему последовательности операций (часть 1), иллюстрирующую пример процедуры обработки информации в блоке вычисления маршрута с Фиг.3.
Фиг.5A представляет собой блок-схему последовательности операций (часть 2), иллюстрирующую пример процедуры обработки информации в блоке вычисления маршрута с Фиг.3.
Фиг.5B представляет собой блок-схему последовательности операций (часть 3), иллюстрирующую пример процедуры обработки информации в блоке вычисления маршрута с Фиг.3.
Фиг.6 представляет собой вид сверху, иллюстрирующий пример маршрута движения от текущего положения до пункта назначения, установленного блоком планирования маршрута устройства содействия движению с Фиг.1.
Фиг.7 представляет собой вид сверху, иллюстрирующий пример дорожной ситуации в конкретные дату и время на маршруте движения, показанном на Фиг.6.
Фиг.8 представляет собой схему, иллюстрирующую пример накопления информации об окружающих объектах, полученных в результате движения по маршруту движения с Фиг.6 множество раз и сохраненных в блоке хранения с Фиг.3.
Фиг.9 представляет собой схему, иллюстрирующую пример уровня опасности и вероятности столкновения, сгенерированных блоком генерирования карты предсказанных опасностей с Фиг.3 с использованием накопленной информации об окружающих объектах Фиг.8.
Фиг.10 представляет собой вид сверху, иллюстрирующий пример предсказанного маневра движения другого транспортного средства, которое избегает опасность, обусловленную первичным оценочным уровнем опасности в дорожной ситуации, показанной на Фиг.7.
Фиг.11 представляет собой вид сверху, иллюстрирующий пример карты предсказанных опасностей, сгенерированной блоком генерирования карты предсказанных опасностей с Фиг.3 для маршрута движения с Фиг.6.
Фиг.12 представляет собой вид сверху, иллюстрирующий пример окончательного маршрута движения, определенного блоком определения действий с Фиг.3 для маршрута движения с Фиг.6.
Фиг.13А представляет собой вид сверху, иллюстрирующий другой пример окончательного маршрута движения, определенного блоком определения действий с Фиг.3 для маршрута движения с Фиг.6.
Фиг.13B представляет собой вид сверху, иллюстрирующий еще один пример окончательного маршрута движения, определенного блоком определения действий с Фиг.3 для маршрута движения с Фиг.6.
Фиг.14 иллюстрирует сравнительный пример по отношению к варианту осуществления с Фиг.12, и представляет собой вид сверху, иллюстрирующий окончательный маршрут движения, определенный с использованием только карты присутствующих опасностей, показанной на Фиг.3.
[Вариант(ы) осуществления настоящего изобретения]
[0009]
Далее один или более вариантов осуществления настоящего изобретения будут описаны со ссылкой на чертежи. Способ содействия движению для транспортного средства и устройство содействия движению для транспортного средства согласно настоящему изобретению могут применяться не только для автономного управления движением, которое автономно выполняет управление скоростью транспортного средства и/или управление рулевым управлением транспортного средства, но также к навигационной системе, которая представляет соответствующий маршрут движения, когда водитель выполняет ручное вождение, чтобы помочь водителю при ручном вождении. При применении к автономному управлению транспортным средством способ содействия движению и устройство содействия движению в соответствии с настоящим изобретением могут применяться не только для автономного управления как скоростью, так и рулевым управлением, но также и для автономного управления одним из скорости и управления рулевого управления и ручного управление другого. Следующее описание будет сделано для примера, в котором способ содействия движению для транспортного средства и устройство содействия движению для транспортного средства согласно настоящему изобретению применяются к транспортному средству, имеющему функцию автономного управления движением. Описание следующих вариантов осуществления выполнено в предположении, что транспортное средство движется по левой стороне в стране, где действуют правила левостороннего движения. В странах с правосторонним движением транспортные средства движутся по правой стороне, поэтому правое и левое в следующем описании следует читать симметрично.
[0010]
Фиг.1 представлена блок-схема, иллюстрирующая конфигурацию системы 1000 содействия движению. Система 1000 содействия движению в соответствии с настоящим вариантом осуществления включает в себя устройство 100 содействия движению и контроллер 200 транспортного средства. Устройство 100 содействия движению в соответствии с настоящим вариантом осуществления включает в себя устройство 111 связи, в то время как контроллер 200 транспортного средства включает в себя устройство 211 связи, и устройство 100 содействия движению и контроллер 200 транспортного средства обмениваются информацией друг с другом посредством проводной связи или беспроводной связи.
[0011]
Более конкретно, система 1000 содействия движению согласно настоящему варианту осуществления включает в себя один или более датчиков 1, навигационное устройство 2, картографическую информацию 3, хранящуюся на считываемом носителе записей, устройство 4 обнаружения информации о задействуемом транспортном средстве, устройство 5 распознавания окружающей обстановки, устройство 6 распознавания объектов, устройство 100 содействия движению и контроллер 200 транспортного средства. Как показано на Фиг.1, датчики 1, навигационное устройство 2, картографическая информация 3, хранящаяся на считываемом носителе записей, устройство 4 обнаружения информации о задействуемом транспортном средстве, устройство 5 распознавания окружающей обстановки, устройство 6 распознавания объектов и каждое устройство устройства 100 содействия движению соединены друг с другом через сеть контроллеров (CAN) или другую бортовую локальную сеть для взаимного обмена информацией.
[0012]
Датчики 1 настоящего варианта осуществления обнаруживают информацию об окружающей обстановке движения, включая наличие препятствий, расположенных вокруг задействуемого транспортного средства, например, вокруг передней, боковых и задней частей задействуемого транспортного средства, и другие ситуации вокруг задействуемого транспортного средства. Датчики 1 настоящего варианта осуществления включают в себя устройства для распознавания информации об окружающей обстановке вокруг задействуемого транспортного средства, например, камеры, включающие в себя элементы формирования изображения, такие как CCD (ПЗС), ультразвуковые камеры, инфракрасные камеры или другие подобные камеры. Камеры согласно настоящему варианту осуществления, которые установлены в задействуемом транспортном средстве, захватывают изображения вокруг задействуемого транспортного средства и получают данные изображения, включающие в себя целевые транспортные средства, присутствующие вокруг задействуемого транспортного средства.
[0013]
Датчики 1 настоящего варианта осуществления включают в себя датчик дальности, и датчик дальности вычисляет относительное расстояние и относительную скорость между задействуемым транспортным средством и объектом. Информация об объекте, обнаруженном датчиком дальности, выводится в процессор 10. Примеры датчика дальности для использования включают в себя схемы, известные на момент подачи настоящей заявки, такие как лазерный радар, радар миллиметрового диапазона, другой аналогичный радар (LRF или т.п.), блок обнаружения и определения дальности света (LiDAR), и ультразвуковой радар.
[0014]
В качестве датчиков 1 настоящего варианта осуществления могут быть применены одна или более камер и датчик дальности. Датчики 1 настоящего варианта осуществления снабжены функцией объединения датчиков для дополнения отсутствующей информации в информации обнаружения посредством интеграции или синтеза информации датчиков от множества различных датчиков, такой как информация обнаружения от камер и информация обнаружения от датчика дальности, чтобы получить информацию об окружающей обстановке вокруг транспортного средства. Эта функция объединения датчиков может быть встроена в устройство 5 распознавания окружающей обстановки, устройство 6 распознавания объектов или другой контроллер или логическую схему.
[0015]
Объекты, обнаруживаемые датчиками 1, включают в себя ограничительные линии полос движения, осевые линии, обозначения дорожного покрытия, разделительные полосы, ограждения, бордюры, боковые стены шоссе, дорожные знаки, светофоры, пешеходные переходы, строительные площадки, местоположения аварий и ограничители движения. Объекты, обнаруживаемые датчиками 1, включают в себя автомобили (другие транспортные средства), отличные от задействуемого транспортного средства, мотоциклы, велосипеды и пешеходов. Объекты, обнаруженные датчиками 1, включают в себя препятствия. Препятствия - это объекты, которые могут повлиять на движение транспортного средства. Датчики 1 обнаруживают, по меньшей мере, информацию о препятствиях. Что касается объекта, обнаруженного датчиками 1, позиционная информация объекта может быть обнаружена из информации о собственном положении задействуемого транспортного средства, которая получена посредством GPS или т.п. и представляет положение движущегося задействуемого транспортного средства, и относительного положения (расстояния и направления) между задействуемым транспортным средством и объектом. Дополнительно или альтернативно в отношении объекта, обнаруженного датчиками 1, позиционная информация объекта может быть обнаружена в связке с картографической информацией из картографической информации, информации о собственном положении задействуемого транспортного средства, которая получается посредством одометрии и представляет положение движущегося задействуемого транспортного средства и относительное положение (расстояние и направление) между задействуемым транспортным средством и объектом.
[0016]
Навигационное устройство 2 согласно настоящему варианту осуществления обращается к картографической информации 3 для вычисления полосы движения/маршрута движения от текущего положения, обнаруженного устройством 4 обнаружения информации о задействуемом транспортном средстве, до пункта назначения. Полоса движения или маршрут движения связаны с дорогой, по которой движется задействуемое транспортное средство, или с формой линии, по которой идентифицируются направление (въезд/выезд) и полоса движения. Маршрут движения включает в себя информацию о полосе движения. В дальнейшем полоса движения может быть описана просто в качестве полосы.
[0017]
Картографическая информация 3 настоящего варианта осуществления хранится в считываемом состоянии на носителе записей, предусмотренном в устройстве 100 содействия движению, бортовом устройстве или серверном устройстве, и используется для генерирования маршрута и/или управления вождением. Картографическая информация 3 настоящего варианта осуществления включает в себя информацию о дороге, информацию о сооружениях и информацию об их атрибутах. Информация о дороге и информация об атрибутах дороги включает в себя информацию о ширине дороги, радиусе кривизны, структуре обочины дороги, правилах дорожного движения (ограничение скорости, разрешена ли смена полосы движения), точке слияния дороги, точке разветвления, положение, при котором количество полос движения увеличивается/уменьшается, и другую подобную информацию. Картографическая информация 3 настоящего варианта осуществления является так называемой картографической информацией высокой четкости, и в соответствии с картографической информацией высокой четкости может быть воспринята траектория перемещения для каждой полосы движения. Картографическая информация высокой четкости включает в себя двухмерную позиционную информацию и/или трехмерную позиционную информацию по каждой координате карты, информацию о границе дороги/полосы движения по каждой координате карты, информацию об атрибутах дороги, информацию о въезде/выезде полосы движения, информацию идентификации полосы движения и информацию о стыковочной полосе движения назначения.
[0018]
Дополнительно или в качестве альтернативы картографическая информация 3 настоящего варианта осуществления включает в себя информацию о границе маршрута движения, которая представляет собой границу между маршрутом, по которому движется задействуемое транспортное средство, и другой областью. Маршрут движения, по которому движется задействуемое транспортное средство, относится к дороге, по которому двигаться задействуемому транспортному средству, и форма маршрута передвижения конкретно не ограничена. Граница маршрута движения существует на каждой из правой и левой сторон по отношению к направлению движения задействуемого транспортного средства. Форма границы маршрута движения конкретно не ограничена, и ее примеры включают в себя обозначения дорожного покрытия и дорожные сооружения. Примеры границы маршрута движения обозначения дорожного покрытия включают в себя линии, ограничивающие полосу движения, и осевые линии. Примеры границы маршрута движения дорожной конструкции включают в себя срединные полосы, ограждения, бордюры, туннели и боковые стены шоссе. Для точки, в которой невозможно четко указать границу маршрута движения (например, внутри перекрестка), граница маршрута движения предварительно задается в картографической информации 3. Предварительно заданная граница маршрута движения является воображаемой границей маршрута движения, а не реально существующим обозначением дорожного покрытия или дорожным сооружением.
[0019]
Устройство 4 обнаружения информации о задействуемом транспортном средстве в соответствии с настоящим вариантом осуществления получает информацию обнаружения, касающуюся состояния задействуемого транспортного средства. Состояние задействуемого транспортного средства включает в себя текущее положение, скорость, ускорение, ориентацию и характеристики транспортного средства. Они могут быть получены от контроллера 200 транспортного средства или могут быть получены иным образом от каждого датчика задействуемого транспортного средства. Устройство 4 обнаружения информации о задействуемом транспортном средстве в соответствии с настоящим вариантом осуществления получает текущее положение задействуемого транспортного средства на основе информации, полученной от блока глобальной системы позиционирования (GPS), гироскопического датчика и/или одометра задействуемого транспортного средства. Устройство 4 обнаружения информации о задействуемом транспортном средстве согласно настоящему варианту осуществления получает скорость и ускорение задействуемого транспортного средства от датчика скорости транспортного средства задействуемого транспортного средства. Устройство 4 обнаружения информации о задействуемом транспортном средстве согласно настоящему варианту осуществления получает данные ориентации задействуемого транспортного средства от инерциального измерительного блока (IMU) задействуемого транспортного средства.
[0020]
Устройство 5 распознавания окружающей обстановки согласно настоящему варианту осуществления распознает позиционную информацию, полученную датчиками 1, информацию распознавания объекта, полученную из информации изображения и информации дальности вокруг задействуемого транспортного средства, и информацию об окружающей обстановке, установленную на основе информации карты. Устройство 5 распознавания окружающей обстановки согласно настоящему варианту осуществления объединяет множество элементов информации для генерирования информации об окружающей обстановке вокруг задействуемого транспортного средства. Устройство 6 распознавания объектов в соответствии с настоящим вариантом осуществления также использует картографическую информацию 3 вместе с информацией изображения и информацией дальности вокруг задействуемого транспортного средства, которые получены от датчиков 1, чтобы тем самым предсказать распознавание и/или маневр объекта вокруг задействуемого транспортного средства.
[0021]
Контроллер 200 транспортного средства в соответствии с настоящим вариантом осуществления представляет собой бортовой компьютер, такой как электронный блок управления (ECU), и осуществляет электронное управление приводным механизмом 210, отвечающим за вождение транспортного средства. Контроллер 200 транспортного средства управляет приводным устройством, тормозным устройством и рулевым устройством, включенными в приводной механизм 210, чтобы обеспечить движение задействуемого транспортного средства в соответствии с целевой скоростью транспортного средства и целевым маршрутом движения. Инструкции управления, основанные на плане вождения задействуемого транспортного средства, вводятся в контроллер 200 транспортного средства из устройства 100 содействия движению. Целевая скорость транспортного средства, целевой маршрут движения и план вождения задействуемого транспортного средства будут описаны позже.
[0022]
Приводной механизм 210 согласно настоящему варианту осуществления включает в себя электродвигатель и/или двигатель внутреннего сгорания в качестве источников привода движения, устройство передачи мощности (трансмиссии), включающее в себя приводной вал и автоматическую коробку переключения передач, которые передают выходную мощность источников привода движения к ведущим колесам, приводное устройство, управляющее устройством передачи мощности, тормозное устройство, тормозящее колеса, рулевое устройство, управляющее управляемыми колесами в соответствии с углом поворота рулевого колеса (так называемая рукоятка), и другие необходимые компоненты. Сигналы управления, соответствующие целевой скорости транспортного средства, вводятся в контроллер 200 транспортного средства от устройства 100 содействия движению. Контроллер 200 транспортного средства генерирует соответствующие сигналы управления для этих компонентов приводного механизма 210 на основе сигналов управления, поступающих от устройства 100 содействия движению, и выполняет управление вождением, включающим в себя ускорение/замедление транспортного средства. Информация управления передается на приводное устройство приводного механизма 210, который, таким образом, может автономно управлять скоростью транспортного средства.
[0023]
Дополнительно или в качестве альтернативы, контроллер 200 транспортного средства согласно настоящему варианту осуществления использует одну или более из информации о полосе движения, хранящейся в картографической информации 3, информации, распознаваемой устройством 5 распознавания окружающей обстановки, и информации, полученной устройством 6 распознавания объектов, для управления рулевым устройством приводного механизма 210 таким образом, чтобы задействуемое транспортное средство двигалось, сохраняя предварительно определенное боковое положение (положение в направлении право-лево транспортного средства) по отношению к целевому маршруту движения. Рулевое устройство включает в себя исполнительный механизм рулевого управления, который включает в себя двигатель и другие необходимые компоненты, закрепленные на валу рулевой колонки. Сигналы управления, соответствующие целевому маршруту движения, вводятся в контроллер 200 транспортного средства от устройства 100 содействия движению. Рулевое устройство приводного механизма 210 выполняет рулевое управление транспортным средством на основе сигналов управления, поступающих от контроллера 200 транспортного средства. Информация управления передается на рулевое устройство приводного механизма 210, которое, таким образом, может автономно управлять рулевым управлением транспортного средства.
[0024]
Устройство 100 содействия движению согласно настоящему варианту осуществления управляет вождением задействуемого транспортного средства, тем самым выполняя управление содействием движению задействуемого транспортного средства. Как показано на Фиг.1, устройство 100 содействия движению согласно настоящему варианту осуществления включает в себя процессор 10. Процессор 10 представляет собой компьютер, включающий в себя ROM 12, которое представляет собой постоянное запоминающее устройство (ROM), хранящее программы для выполнения управления вождением задействуемого транспортного средства, CPU 11, которое является центральным блоком обработки (CPU) в качестве рабочей схемы, выполняющей программы, хранящиеся в ROM 12 для использования в качестве устройства 100 содействия движению, и в RAM 13, которое представляет собой запоминающее устройство c произвольным доступом (RAM), служащее в качестве запоминающего устройства с возможностью доступа. Процессор 10 настоящего варианта осуществления отвечает за различные функции посредством взаимодействия программного обеспечения для достижения вышеуказанных функций и вышеописанного аппаратного обеспечения. Процессор 10 включает в себя устройство 111 связи и устройство 110 вывода и выводит различные команды для вывода или ввода и команды для разрешения считывания информации или предоставления информации контроллеру 200 транспортного средства, навигационному устройству 2, картографической информации 3, устройству 4 обнаружения информации о задействуемом транспортном средстве, устройству 5 распознавания окружающей обстановки и устройству 6 распознавания объектов. Процессор 10 осуществляет взаимный обмен информацией с датчиками 1, навигационным устройством 2, картографической информацией 3, устройством 4 обнаружения информации о задействуемом транспортном средстве, устройством 5 распознавания окружающей обстановки, устройством 6 распознавания объектов и контроллером 200 транспортного средства.
[0025]
Процессор 10 настоящего варианта осуществления включает в себя блок 120 установки пункта назначения, блок 130 планирования маршрута, блок 140 планирования вождения, блок 150 вычисления проезжаемой области, блок 160 вычисления маршрута и блок 170 управления действиями при вождении, которые отвечают за соответствующие функции. Процессор 10 согласно настоящему варианту осуществления сконфигурирован посредством взаимодействия вышеописанных аппаратных средств и программного обеспечения для реализации блока 120 установки пункта назначения, блока 130 планирования маршрута, блока 140 планирования вождения, блока 150 вычисления проезжаемой области, блока 160 вычисления маршрута и блока 170 управления действиями при вождении или выполнение соответствующих процессов.
[0026]
Процедура управления, выполняемая процессором 10 настоящего варианта осуществления, будет описана со ссылкой на Фиг.2. Фиг.2 представляет собой блок-схему последовательности операций, иллюстрирующую процедуру обработки информации системой содействия движению в соответствии с настоящим вариантом осуществления. Схема процесса автономного управления движением, выполняемого устройством 100 содействия движению, будет описана со ссылкой на Фиг.2.
[0027]
На этапе 1 на Фиг.2, сначала процессор 10 управляет блоком 120 установки пункта назначения для выполнения процесса получения текущего положения задействуемого транспортного средства на основе результата обнаружения устройства 4 обнаружения информации о задействуемом транспортном средстве, а на последующем этапе 2 выполняет процесс установки пункта назначения задействуемого транспортного средства. Пункт назначения может быть введен пользователем или иным образом предсказан другим устройством. На последующем этапе 3 процессор 10 управляет блоком 130 планирования маршрута для получения различных элементов информации обнаружения, включающих в себя картографическую информацию 3. На последующем этапе S4 процессор 10 управляет блоком 130 планирования маршрута, чтобы установить полосу движения (или маршрут движения) для пункта назначения, который устанавливается блоком 120 установки пункта назначения. Процессор 10 управляет блоком 130 планирования маршрута, чтобы установить полосу движения с использованием информации, полученной от устройства 5 распознавания окружающей обстановки и/или устройства 6 распознавания объектов в дополнение к картографической информации 3 и/или информации о собственном положении. Процессор 10 управляет блоком 130 планирования маршрута для установки дороги, по которой двигаться задействуемому транспортному средству, и для установки полосы движения дороги, по которой двигаться задействуемому транспортному средству, и, таким образом, то, что должно быть установлено, не ограничивается дорогой.
[0028]
На последующем этапе S5 процессор 10 управляет блоком 140 планирования вождения, чтобы выполнить процесс планирования действием при вождении задействуемого транспортного средства в каждой точке маршрута. План вождения задает действия при вождении, такие как движение вперед (GO) и остановка (No-GO) в каждой точке. Например, при повороте направо на перекрестке принимаются решения, в том числе определение того, следует ли останавливаться в положении стоп-линии, и определение того, следует ли продолжать движение независимо от присутствия транспортного средства на встречной полосе движения.
[0029]
На последующем этапе 6 для выполнения действия при вождении, запланированного на этапе 5, процессор 10 управляет блоком 150 вычисления проезжаемой области для выполнения процесса вычисления области вокруг задействуемого транспортного средства, в которой может двигаться задействуемое транспортное средство (эта область также будет названа проезжаемой областью) с использованием информации, полученной от устройства 5 распознавания окружающей обстановки и/или устройства 6 распознавания объектов в дополнение к картографической информации 3 и/или информации о собственном положении. Проезжаемая область не ограничивается областью в полосе движения, по которой движется задействуемое транспортное средство, и может быть полосой движения, смежной с полосой движения, по которой движется задействуемое транспортное средство (эта полоса движения будет называться смежной полосой движения). Достаточно, чтобы проезжаемая область представляла собой область, в которой может двигаться задействуемое транспортное средство, и проезжаемая область также может быть областью, отличной от области, распознанной в качестве полосы движения на дороге.
[0030]
На последующем этапе 7 процессор 10 управляет блоком 160 вычисления маршрута для выполнения процесса генерирования целевого маршрута движения, по которому движется задействуемое транспортное средство. В дополнение к этому процессор 10 управляет блоком 170 управления действиями при вождении для вычисления целевой скорости транспортного средства и профиля целевой скорости транспортного средства при движении по целевому маршруту движения. Процессор 10 может вычислять целевое замедление и целевое ускорение для текущей скорости транспортного средства и их профилей вместо или в дополнение к целевой скорости транспортного средства. Вычисленная целевая скорость транспортного средства может быть возвращена в процесс генерирования целевого маршрута движения для генерирования целевого маршрута движения, чтобы исключить изменение поведения транспортного средства и маневра (поведения), которое вызывает у пассажира транспортного средства ощущение неудобства. Сгенерированный целевой маршрут движения может быть возвращен в процесс вычисления целевой скорости транспортного средства для вычисления целевой скорости транспортного средства, чтобы исключить изменение поведения транспортного средства и маневра (поведения), которое вызывает у пассажира транспортного средства ощущение неудобства.
[0031]
На этапе 8 процессор 10 выполняет процесс создания плана вождения, который позволяет задействуемому транспортному средству двигаться по сгенерированному целевому маршруту движения. Дополнительно или альтернативно процессор 10 выполняет процесс создания плана вождения, который позволяет задействуемому транспортному средству двигаться со скоростью вычисленной целевой скорости транспортного средства. Затем, на этапе 9, процессор 10 использует устройство 110 вывода для вывода инструкций управления и значений команд управления на основе плана вождения в контроллер 200 транспортного средства через устройство 111 связи, и приводится в действие приводной механизм 210, который включает в себя различные исполнительные механизмы.
[0032]
В контроллер 200 транспортного средства продольная сила и поперечная сила, которые управляют положением движения задействуемого транспортного средства, вводятся на основе значений команд от процессора 10. В ответ на эти входные данные осуществляется управление поведением кузова транспортного средства и поведением колес, так что задействуемое транспортное средство автономно движется, следуя целевому маршруту движения. На основе такого управления по меньшей мере один из приводного исполнительного механизма и тормозного исполнительного механизма приводного механизма 210 кузова транспортного средства и, при необходимости, рулевого исполнительного механизма рулевого устройства в дополнение к вышеперечисленному, работают автономно для выполнения автономного управления движением до пункта назначения. Понятно, что приводной механизм 210 также может работать в ответ на значения команд на основе ручного управления.
[0033]
Между тем, на этапах S1-S4 на Фиг.2, устройство 100 содействия движению согласно настоящему варианту осуществления получает текущее положение задействуемого транспортного средства и устанавливает, исходя из установленного пункта назначения задействуемого транспортного средства и картографической информации 3, маршрут движения от текущего местоположения до пункта назначения. В данном документе, Фиг.3 представляет собой блок-схему, иллюстрирующую вариант осуществления блока 160 вычисления маршрута с Фиг.1. Блок 160 вычисления маршрута настоящего варианта осуществления выполняет процесс генерирования целевого маршрута движения, по которому движется задействуемое транспортное средство. Для получения первичного оценочного уровня опасности и вторичного оценочного уровня опасности для процесса генерирования целевого маршрута движения блок 160 вычисления маршрута включает в себя блок 1601 получения траекторий окружающих объектов, блок 1602 классификации окружающих объектов, блок 1603 хранения информации об окружающих объектах, блок 1604 хранения, блок 1605 генерирования карты предсказанных опасностей, блок 1610 изучения карты присутствующих опасностей, блок 1611 генерирования карты присутствующих опасностей, блок 1612 объединения карт опасностей и блок 1613 определения действий. Блок 1605 генерирования карты предсказанных опасностей включает в себя блок 1606 вычисления уровня опасности, блок 1607 вычисления вероятности столкновения, блок 1608 генерирования первичного оценочного уровня опасности и блок 1609 генерирования вторичного оценочного уровня опасности. Блок 160 вычисления маршрута в соответствии с настоящим вариантом осуществления может дополнительно включать в себя блок 1614 обнаружения избегающего опасность транспортного средства и блок 1615 генерирования уровня опасности избегающего опасность транспортного средства. Блок 1614 обнаружения избегающего опасность транспортного средства и блок 1615 генерирования уровня опасности избегающего опасность транспортного средства могут быть опущены по мере необходимости. Каждый из этих блоков 1601-1615 может быть реализован посредством программного обеспечения, установленного в ROM 12 устройства 100 содействия движению. Следует отметить, что каждый из этих блоков 1601-1615 просто классифицируется в описательных целях для описания функций, проявляемых при выполнении программы, и поэтому не определяет объем прав.
[0034]
Следующие варианты осуществления будут описаны в предположении, что блок 160 вычисления маршрута, показанный на Фиг.1 и 3, предусмотрен в транспортном средстве, но часть блока 160 вычисления маршрута не обязательно должна быть предусмотрена на стороне транспортного средства. В частности, на Фиг.3, некоторые или все из блока 1603 хранения информации об окружающих объектах, блока 1604 хранения, блока 1605 генерирования карты предсказанных опасностей, блока 1606 вычисления уровня опасности, блока 1607 вычисления вероятности столкновения, блока 1608 генерирования первичного оценочного уровня опасности, блока 1609 генерирования вторичного оценочного уровня опасности, блок 1610 изучения карты присутствующих опасностей, блок 1611 генерирования карты присутствующих опасностей, блок 1612 объединения карт опасностей, блок 1614 обнаружения избегающего опасность транспортного средства и блок 1615 генерирования уровня опасности избегающего опасность транспортного средства могут быть предусмотрены на сервере и т.п. Когда некоторые или все блоки, составляющие блок 160 вычисления маршрута, предусмотрены на сервере или подобном устройстве, отличном от транспортного средства, а остальные блоки предусмотрены в транспортном средстве, передача и прием информации между транспортным средством и сервером могут выполняться в режиме реального времени через телекоммуникационную сеть, такую как Интернет. Также возможно обеспечить блок 1603 хранения информации об окружающих объектах и/или блок 1604 хранения на сервере и накапливать информацию об объектах, обнаруженных множеством транспортных средств, в блоке 1603 хранения информации об окружающих объектах и/или блоке 1604 хранения. В этом случае транспортное средство, обнаруживающее объект, может не обязательно быть тем же самым транспортным средством, использующим информацию об уровне опасности. При условии, что некоторые или все из присутствующего (существующего) уровня опасности, первичного оценочного уровня опасности и вторичного оценочного уровня опасности вычислены на сервере, когда по меньшей мере один из них используется для автономного управления транспортным средством, можно получить присутствующий уровень опасности, первичный оценочный уровень опасности и вторичный оценочный уровень опасности, соответствующие информации о собственном положении с сервера.
[0035]
Дополнительно или в качестве альтернативы, время вычисления первичного оценочного уровня опасности, генерируемого блоком 1608 генерирования первичного оценочного уровня опасности блока 1605 генерирования карты предсказанных опасностей, и вторичного оценочного уровня опасности, генерируемого блоком 1609 генерирования вторичного оценочного уровня опасности, может быть время накопления на сервере оценочных уровней опасности, которые предварительно вычислены на сервере, или первичный оценочный уровень опасности и вторичный оценочный уровень опасности могут быть иначе вычислены во время движения в местоположении столкновения. Дополнительно или альтернативно, одна из карты присутствующих (существующих) опасностей, сгенерированной блоком 1611 генерирования карты присутствующих опасностей, карты предсказанных опасностей, сгенерированной блоком 1605 генерирования карты предсказанных опасностей, и объединенной карты опасностей, сгенерированной блоком 1612 объединения карт опасностей, может быть сгенерирована на сервере, а другие могут быть сгенерированы в транспортном средстве. Первичный оценочный уровень опасности и вторичный оценочный уровень опасности могут быть вычислены из накопленных данных или также могут быть вычислены из такой информации, как информация о строительных работах или информация о дорожном заторе, доступная из инфраструктуры, такой как система дорожного транспорта.
[0036]
Блок 1601 получения траекторий окружающих объектов получает соответствующие траектории участников дорожного движения вокруг задействуемого транспортного средства. К участникам дорожного движения относятся автомобили, пешеходы, велосипеды, мотоциклы и другие объекты (препятствия и т.п., например, строительные участки). Автомобили включают в себя впереди идущие транспортные средства, припаркованные транспортные средства, расположенные сзади транспортные средства, выезжающие из потока транспортные средства, (транспортные средства, которые уезжают с текущей полосы движения в другую полосу движения), въезжающие в поток транспортные средства (транспортные средства, которые заезжают в текущую полосу движения с другой полосы движения), транспортные средства, являющиеся препятствиями, и другие транспортные средства. К пешеходам относятся дети, пожилые люди и другие пешеходы в зависимости от возраста, и остановившиеся, идущие или бегущие пешеходы. Велосипеды включают в себя велосипеды для детей, пожилых людей и других людей в зависимости от возраста, и велосипеды, которые останавливаются или движутся с низкой или высокой скоростью. Мотоциклы включают в себя впереди идущие мотоциклы, остановившиеся мотоциклы, находящиеся сзади мотоциклы, выезжающие из потока мотоциклы (мотоциклы, которые уезжают с текущей полосы движения в другую полосу), въезжающие в поток мотоциклы (мотоциклы, которые присоединяются к текущей полосе движения из другой полосы движения), мотоциклы, являющиеся препятствиями, и другие мотоциклы.
[0037]
Для блока 1601 получения траекторий окружающих объектов задействуемое транспортное средство может служить в качестве исследовательского автомобиля в течение движения в произвольном месте для обнаружения и отслеживания участников дорожного движения и других объектов с использованием датчиков 1, таких как камера и датчик дальности. Блок 1601 получения траекторий окружающих объектов передает элементы информации о положениях, скоростях и направлениях участников дорожного движения в блок 1602 классификации окружающих объектов вместе с временными метками. Блок 1602 классификации окружающих объектов классифицирует элементы информации о положениях, скоростях и направлениях участников дорожного движения и других объектов, которые считываются из блока 1601 получения траекторий окружающих объектов, на основе критериев классификации для вышеописанных участников дорожного движения и других объектов, а затем передает классифицированные элементы информации в блок 1603 хранения информации об окружающих объектах и блок 1610 изучения карты присутствующих опасностей. Элементы информации о положениях, скоростях и направлениях участников дорожного движения и других объектов, переданные в блок 1603 хранения информации об окружающих объектах, используются для генерирования первичного оценочного уровня опасности и вторичного оценочного уровня опасности для последующего запроса содействия движению. С другой стороны, элементы информации о положениях, скоростях и направлениях участников дорожного движения и других объектов, переданные в блок 1610 изучения карты присутствующих опасностей, используются для генерирования карты присутствующих опасностей для содействия движению, которое выполняется в данный момент. Дополнительно или в качестве альтернативы, блок 1601 получения траекторий окружающих объектов может также передавать ту же информацию, что и информация об окружающих объектах, которая передается в блок 1602 классификации окружающих объектов, в блок 1614 обнаружения избегающего опасность транспортного средства.
[0038]
Блок 1602 классификации окружающих объектов не только классифицирует участников дорожного движения и другие объекты, как описано выше, но также, в частности, в настоящем варианте осуществления, классифицирует объекты, включающих в себя участников дорожного движения, которые получены блоком 1601 получения траекторий окружающих объектов, в объекты, перегораживающие полосу на длительное время, объекты, временно перегораживающие полосу движения, объекты, препятствующие транспортному потоку, или объекты, частично препятствующие транспортному потоку. Например, когда обнаруженный объект является припаркованным транспортным средством или строительным участком, он классифицируется как объект, который преграждает полосу движения в течение длительного времени, а когда обнаруженный объект является транспортным средством, ожидающим правого или поворота налево, остановившимся автобусом или тому подобным и перемещение в данный момент остановлено, но транспортный поток со временем будет восстановлен, классифицируется как объект временно перегораживающий полосу движения. Дополнительно или альтернативно, когда обнаруженный объект представляет собой транспортное средство, которое не останавливает движение, но может мешать транспортному потоку, например, въезжающее в поток транспортное средство или транспортное средство, застрявшее в полосе движения, оно классифицируется как объект, который препятствует транспортному потоку, в то время как когда обнаруженный объект является объектом, который может позволить задействуемому транспортному средству продолжить движение, избегая объект в боковом направлении, такой как пешеход, велосипед или двухколесное транспортное средство, он классифицируется как объект, который частично препятствует движению транспортного потока.
[0039]
Для обнаруженного объекта предварительно устанавливается уровень опасности для каждой из этих классификаций, и значение уровня опасности для каждой классификации используется блоком 1606 вычисления уровня опасности, который будет описан далее. Уровень опасности, как упоминается в настоящем документе, означает показатель степени опасности приближения задействуемого транспортного средства к препятствию (показатель ощущения опасности), и чем больше значение уровня опасности, тем выше опасность приближения задействуемого транспортного средства к препятствию. Относительное числовое значение используется из-за показателя ощущения опасности. Например, предварительно устанавливается соотношения величин уровней опасности для пешеходов среди участников дорожного движения, например, дети-пешеходы > пожилые пешеходы > другие пешеходы. Дети и пожилые люди являются такими же уязвимыми участниками дорожного движения, как и другие пешеходы, но дети более активны, чем пожилые люди, поэтому ожидается внезапный рывок к транспортным средствам. Поэтому уровень опасности детей-пешеходов устанавливается на максимальное значение. Таким образом, предварительно устанавливаются уровни опасности для всех участников дорожного движения и других объектов с точки зрения степени опасности приближения задействуемого транспортного средства.
[0040]
В частности, в настоящем варианте осуществления высокий уровень опасности устанавливается в порядке объекта, который преграждает полосу движения на длительное время, объекта, который временно преграждает полосу движения, объекта, который препятствует транспортному потоку, и объекта, который частично препятствует транспортному потоку. То есть с точки зрения объектов, препятствующих транспортному потоку по полосе движения, соотношение величины уровней опасности для четырех классификаций объекта, преграждающего полосу движения на длительное время, объекта, временно преграждающего полосу движения, объекта, препятствующий транспортному потоку, и объекта, частично мешающий транспортному потоку, определяется как объект, преграждающий полосу движения на длительное время > объект, временно преграждающий полосу движения > объект, препятствующих транспортному потоку > объект, частично препятствующих транспортному потоку.
[0041]
Блок 1603 хранения информации об окружающих объектах сохраняет элементы информации о положениях, скоростях, направлениях и времени участников дорожного движения и других объектов, которые классифицируются блоком 1602 классификации окружающих объектов, в блоке 1604 хранения. То есть, в то время как множество транспортных средств, включающих в себя задействуемое транспортное средство, движутся в произвольном месте, эти транспортные средства служат в качестве исследовательских автомобилей для повторения обработки вышеуказанным блоком 1601 получения траекторий окружающих объектов, блоком 1602 классификации окружающих объектов, блоком 1603 хранения информации об окружающих объектах и блоком 1604 хранения, и, таким образом, уровни опасности участников дорожного движения и других объектов последовательно накапливаются в блоке 1604 хранения, чтобы быть связанными с позиционной информацией о положениях, в которых обнаружены соответствующие объекты.
[0042]
В дополнение к позиционной информации о положении, в котором обнаружен объект, атрибутивная информация, такая как дата и время обнаружения объекта и/или погода, может быть связана и сохранена в блоке 1604 хранения. В этом случае может быть связан атрибут даты обнаружения объекта, такой как месяц, день недели, государственный праздник или начало/конец месяца, например, или атрибут времени, такой как утро/полдень/полночь, временной интервал для начала рабочего времени/временной интервал для выезда или временной интервал для приема пищи, например, могут быть связаны.
[0043]
Когда атрибут погоды связан, информация о погоде может быть получена через сеть связи, такую как Интернет, но датчик капель дождя, включенный в датчики 1, может использоваться для определения того, идет ли дождь или нет, или устройство 4 обнаружения информации о задействуемом транспортном средстве может использоваться для определения рабочего состояния дворников, таким образом, чтобы определять, идет дождь или нет.
[0044]
Описание будет сделано для примера, в котором, в то время как множество транспортных средств, включающих в себя задействуемое транспортное средство, движется в произвольном месте, эти транспортные средства служат в качестве исследовательских автомобилей для повторения обработки вышеуказанным блоком 1601 получения траекторий окружающих объектов, блоком 1602 классификации окружающих объектов, блоком 1603 хранения информации об окружающих объектах и блоком 1604 хранения на Фиг.3, и информация об окружающих объектах, таким образом, накапливается в блоке 1604 хранения на Фиг.3. Фиг.6 представляет собой вид сверху, иллюстрирующий пример маршрута движения от текущего положения до пункта назначения, установленного блоком 130 планирования маршрута устройства 100 содействия движению согласно настоящему варианту осуществления, и предполагается, что маршрут движения, например, часть регулярно прокладываемого маршрута для задействуемого транспортного средства V1. Фиг.7 представляет собой вид сверху, иллюстрирующий пример дорожной ситуации в конкретные дату и время на маршруте движения, показанном на Фиг.6.
[0045]
Регулярно прокладываемый маршрут задействуемого транспортного средства V1, показанный на Фиг.6, представляет собой маршрут движения задействуемого транспортного средства V1 для смены полос движения с левой полосы движения дороги D1, которая представляет текущее положение P1 задействуемого транспортного средства V1, на полосу движения только для поворота направо перед перекрестком C, как показано посредством маршрута R1 движения, поворота направо на перекрестке C, как показано на маршруте R2 движения, въезда на левую полосу движения дороги D2 после поворота направо, как показано на маршруте R3 движения, поворота налево на первом Т-образном перекрестке из левой полосы движения дороги D2 и движения прямо, как показано на маршруте R4 движения. Предполагается, что задействуемое транспортное средство V1 движется по регулярно прокладываемым маршрутам R1→R2→R3→R4 движения (в дальнейшем они также будут совместно именоваться маршрутом R движения), показанным на Фиг.6, каждый день, а дорожная ситуация в конкретный день и время проиллюстрирована на Фиг.7. Транспортные средства, показанные на Фиг.7, представляют собой все остальные транспортные средства. Есть другие транспортные средства V2a и V2b, которые остановились в левой полосе движения дороги D1, и затор возникает из-за четырех других транспортных средств V3a-V3d, ожидающих поворота налево на перекрестке C. Затор также возникает из-за пяти других транспортных средств V4a-V4e, которые ожидают поворота направо на правой полосе движения и полосе движения только для поворота направо дороги D1, и есть еще одно транспортное средство V5, остановленное на левой полосе движения дороги D2.
[0046]
S1-S4 на Фиг.6 представляют собой светофоры, и предполагается, что на перекрестке С для левостороннего движения на Фиг.6, транспортные средства, движущиеся по левосторонним полосам движения в направлении вверх-вниз на чертеже, движутся вслед за светофором S1, транспортные средства, движущиеся по правосторонним полосам движения в направлении вверх-вниз на чертеже, движутся вслед за светофором S2, транспортные средства, движущиеся по верхним полосам движения, идущим в право-левом направлении движения чертежа, следуют за светофором S3, и транспортные средства, движущиеся по нижним полосам движения, идущим в право-левом направлении движения чертежа следуют светофору S4. Также предполагается, что в сцене движения на Фиг.6 горят зеленые огни слева у светофоров S1 и S2 и красные огни справа у светофоров S3 и S4. Настройки светофоров S1-S4 одинаковы для сцен движения, показанных на Фиг.7 и Фиг.10-14.
[0047]
В такой ситуации, если предположить, что задействуемое транспортное средство движется по маршруту R движения, показанному на Фиг.6, в конкретную дату и время (с 6:00 до 7:00 5 февраля 2019 г.), то сначала другие транспортные средства V2a и V2b (уровень опасности определяется как опасность A), которые остановлены в левой полосе движения (определяется в качестве полосы 1 движения) дороги D1 (дорожный участок определен как 0001) обнаруживаются, и, таким образом, сохраняется, что существует уровень опасности для опасности A в полосе 1 движения дорожного участка 0001 в эту дату и время. Затем обнаруживаются четыре других транспортных средства V3a-V3d (уровень опасности определяется как опасность B), которые выстроились в линию на левой полосе движения дороги D1, чтобы дождаться поворота налево на перекрестке C, и таким образом сохраняется, что существует уровень опасности для опасности B в полосе 1 движения дорожного участка 0001 на эту дату и время (с 6:00 до 7:00 5 февраля 2019 г.). Аналогичным образом, пять других транспортных средств V4a-V4e (уровень опасности определяется как опасность B), которые ожидают поворота направо, обнаруживаются в правой полосе движения (определяется в качестве полосы 3 движения) и полосе движения только для поворота направо (определяется в качестве полосы 4 движения) дороги D1, и таким образом сохраняется, что существует уровень опасности B на полосах 3 и 4 движения дорожного участка 0001 в эту дату и время (с 6:00 до 7:00 5 февраля 2019 г.). Аналогично, другое транспортное средство V5 (уровень опасности определяется как опасность A), которое остановлено, обнаруживается на левой полосе движения (определяется в качестве полосы 1 движения) дороги D2 (дорожный участок определяется как 0002) и, таким образом, сохраняется, что существует уровень опасности для опасности А в полосе 1 движения дорожного участка 0002 на эту дату и время (с 6:00 до 7:00 5 февраля 2019 г.). С другой стороны, на центральной полосе движения (определяемой в качестве полосы 2 движения) дорожного участка 0001 или правой полосе движения (определяемой в качестве полосы 2 движения) дорожного участка 0002 не обнаружено никаких объектов, кроме указанных выше, и уровень опасности обнаружения объекта поэтому сохраняется как 0 (ноль).
[0048]
Фиг.8 представляет собой схему, иллюстрирующую пример накопления информации об окружающих объектах, полученных в результате движения по маршруту движения с Фиг.6 множество раз и сохраненных в блоке 1604 хранения на Фиг.3. В столбцах опасностей A-D на фигуре цифра «1» означает, что соответствующая опасность «присутствует», а цифра «0» означает, что соответствующая опасность «отсутствует». Как описано выше, при движении по регулярно прокладываемому маршруту R в дорожной ситуации, показанной на Фиг.7, с 6:00 до 7:00 5 февраля 2019 г. сохраняется, что в строках даты и времени с 6:00 до 7:00 5 февраля 2019 г. на Фиг.8, существуют уровни опасности опасностей A и B в полосе 1 движения дорожного участка 0001, существует уровень опасности для опасности B на полосах 3 и 4 движения дорожного участка 0001, и существует уровень опасности для опасности A в полосе 1 движения дорожного участка 0002, и сохраняется, что опасность опасности A, B, C или D не обнаружена на других дорожных участках или полосах движения.
[0049]
Аналогичным образом сохраняется, что в строках даты и времени с 6:00 до 7:00 6 февраля 2019 г. на Фиг.8, существует уровень опасности для опасности B в полосе 1 движения дорожного участка 0001 и существует уровень опасности для опасности A в полосе 1 движения дорожного участка 0002, и сохранено, что опасность опасности A, B, C, или D не обнаружена на других дорожных участках или полосах движения. Аналогичным образом сохраняется, что в строках даты и времени с 6:00 до 7:00 7 февраля 2019 г. на Фиг.8, существуют уровни опасности опасностей A и B в полосе 1 движения дорожного участка 0001, существует уровень опасности для опасности B на полосах 3 и 4 движения дорожного участка 0001, и существует уровень опасности для опасности A в полосе 1 движения дорожного участка 0002, и также сохраняется, что опасность опасности A, B, C или D не обнаружена на других дорожных участках или полосах движения.
[0050]
Обращаясь снова к Фиг.3, когда задействуемое транспортное средство V1 вводит пункт Px назначения, чтобы начать движение с этого момента, или при создании плана движения, блок 160 вычисления маршрута настоящего варианта осуществления получает первичный оценочный уровень опасности и вторичный оценочный уровень опасности для всей области маршрута движения R1→R2→R3→R4 от текущего положения P1 задействуемого транспортного средства V1 до пункта Px назначения и устанавливает маршрут движения транспортного средства на основе первичного оценочного уровня опасности и вторичного оценочного уровня опасности. Первичный оценочный уровень опасности и вторичный оценочный уровень опасности оцениваются для каждого положения движения и получаются из уровня опасности в каждом положении движения (которое также является местоположением столкновения с обнаруженным объектом, здесь и далее), предварительно накопленного в блоке 1604 хранения, и вероятности столкновения с объектом. Дополнительно или в качестве альтернативы, может быть обнаружено другое транспортное средство, которое избегает первичный оценочный уровень опасности, для получения уровня опасности избегающего опасность транспортного средства, и маршрут движения транспортного средства может быть установлен на основе уровня опасности избегающего опасность транспортного средства. Следующее описание будет сделано для способов получения уровня опасности в каждой точке движения и вероятности столкновения с объектом и т.д. для области маршрута R движения, показанного на Фиг.6, но те же способы можно применять и к другим областям.
[0051]
Сначала, будет описан способ получения первичного оценочного уровня опасности. Блок 1606 вычисления уровня опасности извлекает из информации, накопленной в блоке 1604 хранения, уровень опасности на каждом дорожном участке маршрута движения от текущего положения до пункта назначения. Параллельно с этим блок 1607 вычисления вероятности столкновения получает из информации, также накопленной в блоке 1604 хранения, вероятность столкновения на каждом дорожном участке маршрута движения от текущего положения до пункта назначения. Время получения вероятности столкновения может быть периодическим или может также быть временем получения вероятности столкновения. Фиг.9 представляет собой схему, иллюстрирующую пример уровня опасности и вероятности столкновения, сгенерированных блоком 1606 вычисления уровня опасности и блоком 1607 вычисления вероятности столкновения блока 1605 генерирования карты предсказанных опасностей с использованием накопленной информации об окружающих объектах, показанных на Фиг.8. Уровень опасности для опасности A равен 100, уровень опасности для опасности B равен 80, уровень опасности для опасности C равен 50, уровень опасности для опасности D равен 20, и столбцы опасности D опущены на Фиг.9.
[0052]
Как показано на Фиг.8, в полосе 1 движения дорожного участка 0001 опасность А была обнаружена дважды при трех движениях, и объект опасности В был обнаружен каждый день при движении три раза, но другой опасности С или D не было обнаружен. Как показано на Фиг.9, поэтому вероятность столкновения с опасностью A в полосе 1 движения дорожного участка 0001 вычисляется как 66% (=2÷3), вероятность столкновения с опасностью B вычисляется как 100%, а вероятности столкновения с опасностями C и D вычисляются как 0%. Аналогичным образом, в полосе 2 движения дорожного участка 0001 объект опасности A, B, C или D не был обнаружен ни в один из дней, как показано на Фиг.8. Как показано на Фиг.9, поэтому все вероятности столкновения с опасностями A-D в полосе 2 движения дорожного участка 0001 вычисляются как 0%. Как показано на Фиг.8, на каждой из полос 3 и 4 движения дорожного участка 0001 объект опасности B был обнаружен дважды при трехкратном движении; поэтому, как показано на Фиг.9, вероятность столкновения с опасностью B на полосах 3 и 4 движения дорожного участка 0001 вычислена как 66% (=2÷3). Как показано на Фиг.8, в полосе 1 движения дорожного участка 0002 объект опасности А был обнаружен каждый день в течение движения три раза; поэтому, как показано на Фиг.9, вероятность столкновения с опасностью А в полосе 1 движения дорожного участка 0002 вычисляется как 100%.
[0053]
Блок 1608 генерирования первичного оценочного уровня опасности умножает уровень опасности для каждой полосы движения каждого дорожного участка, разделенный в направлении продолжения дороги, на больший коэффициент, чем выше вероятность столкновения, и складывает уровни опасности, которые, таким образом, умножаются на соответствующие коэффициенты, чтобы получить первичный оценочный уровень опасности. Уровень опасности, умноженный на коэффициент, получают для каждого дорожного участка, разделенного, например, на 100 м по отношению к направлению продолжения дороги, а для дороги, имеющей множество полос движения, получают для каждой полосы движения.
[0054]
Коэффициент, умножаемый на уровень опасности, особо не ограничивается, при условии, что коэффициент тем больше, чем выше вероятность столкновения, и числовое значение вероятности столкновения, выраженное в процентах, может быть умножено без каких-либо изменений. Например, как показано на Фиг.9, в полосе 1 движения дорожного участка 0001 вероятность столкновения с опасностью A (уровень опасности равен 100) составляет 66%, вероятность столкновения с опасностью B (уровень опасности равен 80) составляет 100%, а вероятность столкновения с опасностью C (уровень опасности 50) составляет 0%; следовательно, первичный оценочный уровень опасности вычисляется как 100×66%+80×100%+50×0%=14600. Аналогично, как показано на Фиг.9, в полосе 1 движения дорожного участка 0002 вероятность столкновения с опасностью A (уровень опасности равен 100) равна 100%, вероятность столкновения с опасностью B (уровень опасности составляет 80) равна 0%, а вероятность столкновения с опасностью C (уровень опасности 50) равна 0%; поэтому первичный оценочный уровень опасности вычисляется как 100×100%+80×0%+50×0%=10000. Таким образом, первичный оценочный уровень опасности, полученный из уровень опасности и вероятности столкновения, представляет собой значение, равное или меньше уровня опасности.
[0055]
При получении значения первичного оценочного уровня опасности время избегания, необходимое для избегания обнаруженного объекта, может быть суммировано для каждой классификации обнаруженного объекта, и первичный оценочный уровень опасности может быть взвешен с отношением времени избегания для каждой классификации. Например, при условии, что объект, который преграждает полосу в течение длительного времени, классифицируется как объект с опасностью A (=100), объект, который временно преграждает полосу движения, классифицируется как объект с опасностью B (=80), объект, который препятствует движению транспортного потока классифицируется как имеющий опасность C (=50), а объект, который частично препятствует транспортному потоку, классифицируется как имеющий опасность D (=20), когда среднее время, необходимое для избегания каждого из объектов, классифицируемых как имеющие опасности A, B , C и D, составляет 10 минут, 5 минут, 1 минуту или 0,5 минуты соответственно, первичный оценочный уровень опасности может быть получен посредством умножения уровней опасности опасностей A, B, C и D на соответствующие вероятности столкновения, умножения этих умноженных уровней опасности на 10, 5, 1 и 0,5 в качестве весовых коэффициентов соответственно, а затем суммируя их.
[0056]
Дополнительно или в качестве альтернативы при получении значения первичного оценочного уровня опасности вероятность столкновения в каждом положении движения может быть получена посредством извлечения из элементов информации, хранящихся в блоке 1604 хранения, временного интервала, включающего в себя время движения из текущего P1 положения в пункт Px назначения. Аналогичным образом, при получении значения первичного оценочного уровня опасности вероятность столкновения в каждом положении перемещения может быть получена посредством извлечения из числа элементов информации, хранящихся в блоке 1604 хранения, информации об общем атрибуте даты при перемещении из текущего P1 положения в пункт Px назначения. Аналогичным образом, при получении значения первичного оценочного уровня опасности вероятность столкновения в каждом положении движения может быть получена посредством извлечения из числа элементов информации, хранящихся в блоке 1604 хранения, информации об общей рабочей ситуации дворников при движении из текущего P1 положения в пункт Px назначения.
[0057]
Далее будет описан способ получения вторичного оценочного уровня опасности. Блок 1609 генерирования вторичного оценочного уровня опасности получает вторичный оценочный уровень опасности, более низкий, чем первичный оценочный уровень опасности, с использованием предсказанного маневра другого транспортного средства, которое избегает опасность, обусловленную первичным оценочным уровнем опасности. Здесь опасность, обусловленная первичным оценочным уровнем опасности, относится к опасности, идентифицированной посредством уровня опасности и местоположения столкновения, которые используются, когда блок 1608 генерирования первичного оценочного уровня опасности получает первичный оценочный уровень опасности. То есть уровень опасности соответствует классифицированной опасности (например, любой из опасностей A-D), и, следовательно, можно понять, с каким видом опасности происходит столкновение в каком местоположении на маршруте R движения исходя из уровня опасности и местоположения столкновения. Предсказанный маневр движения согласно настоящему варианту осуществления относится к такому маневру движения, при котором, когда движущееся транспортное средство сталкивается с опасностью, препятствующей движению, такой как другое транспортное средство, остановившееся в левой полосе движения, или дорожный затор в ожидании поворота направо или налево, и который, как предсказывается, транспортное средство совершит для избегания опасности и продолжения движения. Как предсказать маневр движения будет описано ниже на примере предсказанного маневра движения в сцене движения, показанной на Фиг.7.
[0058]
Фиг.10 представляет собой вид сверху, иллюстрирующий пример предсказанного маневра движения другого транспортного средства, которое избегает опасность, обусловленную первичным оценочным уровнем опасности в сцене движения, показанной на Фиг.7. На Фиг.10, как и в сцене движения, показанной на Фиг.7, предполагается, что есть другие транспортные средства V2a и V2b, остановившиеся в левой полосе движения дороги D1, четыре других транспортных средства V3a-V3d, выстроившиеся в линию в левой полосе движения дороги D1, чтобы дождаться поворота налево на перекрестке C, пять других транспортных средств V4a-V4e, ожидающих поворота направо на правой полосе движения и полосе движения только для поворота направо дороги D1, и еще одно транспортное средство V5, остановившееся на левой полосе движения дороги D2. Эти транспортные средства соответствуют опасностям, обусловленным первичным оценочным уровнем опасности. Также предполагается, что есть еще одно транспортное средство V2x, которое движется позади других транспортных средств V2a и V2b, еще одно транспортное средство V3x, которое движется позади других транспортными средств V3a-V3d, и еще одно транспортное средство V4x, которое движется позади других транспортными средств V4a-V4e, и эти другие транспортные средства V2x, V3x и V4x движутся по маршрутам движения прямо через перекресток C.
[0059]
В этой сцене движения другое транспортное средство V2x, которое движется по левой полосе движения дороги D1, не может продолжать движение по левой полосе движения из-за столкновения с другими транспортными средствами V2a и V2b, которые остановились. Поэтому, как показано на Фиг.10, например, предсказывается, что другое транспортное средство V2x сменит полосу движения позади остановившегося другого транспортного средства V2b с левой полосы движения дороги D1 на центральную полосу движения, чтобы избежать остановившихся других транспортных средств V2a и V2b и продолжить движение. То есть в этом случае предсказанный маневр движения другого транспортного средства V2x, которое избегает опасность, представляет собой смену полосы движения позади остановившегося другого транспортного средства V2b с левой полосы движения дороги D1 на центральную полосу движения.
[0060]
Также в приведенной выше сцене движения другое транспортное средство V3x, которое движется позади другого транспортного средства V3d, сталкивается с дорожным затором от других транспортных средств V3a-V3d, которые ждут поворота налево на перекрестке C, и для того, чтобы продолжить движение по левой полосе движения, другое транспортное средство V3x должно ждать позади другого транспортного средства V3d до тех пор, пока не будет устранен дорожный затор, связанный с ожиданием поворота налево. Поэтому, как показано на Фиг.10, например, предсказывается, что другое транспортное средство V3x сменит полосу движения позади другого транспортного средства V3d с левой полосы движения дороги D1 на центральную полосу движения, чтобы избежать дорожный затор других транспортных средств V3a-V3d и продолжить движение без ожидания устранения дорожного затора. То есть в этом случае предсказанный маневр движения другого транспортного средства V3x, которое избегает опасность, представляет собой смену полосы движения позади другого транспортного средства V3d с левой полосы движения дороги D1 на центральную полосу движения.
[0061]
Аналогичным образом, в приведенной выше сцене движения другое транспортное средство V4x, которое движется позади другого транспортного средства V4e, сталкивается с дорожным затором других транспортных средств V4a-V4e, которые ждут поворота направо на перекрестке C, и для того, чтобы продолжить движение в правой полосе движения, другое транспортное средство V4x должно ждать позади другого транспортного средства V4e до тех пор, пока дорожный затор в ожидании поворота направо не будет устранен. Поэтому, как показано на Фиг.10, например, предсказывается, что другое транспортное средство V4x сменит полосу движения позади другого транспортного средства V4e с правой полосы движения дороги D1 на центральную полосу движения, чтобы избежать дорожный затор других транспортных средств V4a-V4e и продолжить движение без ожидания устранения дорожного затора. То есть в этом случае предсказанный маневр движения другого транспортного средства V4x, которое избегает опасность, представляет собой смену полосы движения позади другого транспортного средства V4e с правой полосы движения дороги D1 на центральную полосу движения.
[0062]
Здесь, на Фиг.10 предполагается, что задействуемое транспортное средство V1 движется прямо по центральной полосе движения дороги D1. Если другие транспортные средства V2x, V3x и V4x сменяют полосы движения с левой или правой полосы движения на центральную в соответствии с предсказанным маневром движения, другие транспортные средства V2x, V3x и V4x въедут на центральную полосу движения, в которой задействуемое транспортное средство V1 движется, впереди в направлении движения задействуемого транспортного средства V1. То есть задействуемому транспортному средству V1 может быть создана помеха впереди на центральной полосе движения, по которой движется задействуемое транспортное средство V1, другими транспортными средствами V2x, V3x и V4x, избегающими другие остановившиеся транспортные средства V2a и V2b, дорожный затор от других транспортных средств V3a-V3d, ожидающих поворота налево, и дорожный затор других транспортных средств V4a-V4e, ожидающих поворота направо, соответственно. Блок 1609 генерирования вторичного оценочного уровня опасности воспринимает возможность создания помехи каждым из других транспортных средств V2x, V3x и V4x как опасность и вычисляет вторичный оценочный уровень опасности на основе этой опасности.
[0063]
Когда опасность создания помехи от другого транспортного средства V2x или т.п. размещена как вторичный оценочный уровень опасности на карте предсказанных опасностей, положение, в котором размещен вторичный оценочный уровень опасности, расположено позади местоположения, в котором произойдет столкновение с опасностью, например, в смежной полосе движения по отношению к полосе движения, соответствующей местоположению столкновения с опасностью первичного оценочного уровня опасности. Например, в случае опасности создания помехи другим транспортным средством V2x, показанным на Фиг.10, местоположение, в котором другое транспортное средство V2x сталкивается с опасностью, является местоположением позади другого транспортного средства V2b, которое остановлено на левой полосе движения дороги D1. Тогда полоса движения, соответствующая местоположению позади другого транспортного средства V2b, то есть полоса движения, смежная с левой полосой движения дороги D1, является центральной полосой движения дороги D1. Таким образом, в этом случае вторичный оценочный уровень опасности, полученный в результате маневра движения в избегание других транспортных средств V2a и V2b, которые остановлены, размещен в центральной полосе движения дороги D1 позади другого транспортного средства V2b.
[0064]
В случае опасности создания помехи другим транспортным средством V3x, показанным на Фиг.10, местоположение, в котором другое транспортное средство V3x сталкивается с опасностью, является местоположением позади другого транспортного средства V3d, что является концом дорожного затора в ожидании поворота налево на дороге D1. Тогда полоса движения, соответствующая местоположению позади другого транспортного средства V3d, то есть полоса движения, смежная с левой полосой движения дороги D1, является центральной полосой движения дороги D1. Таким образом, в этом случае вторичный оценочный уровень опасности, полученный в результате маневра движения по избеганию дорожного затора от других транспортных средств V3a-V3d, ожидающих поворота налево, размещен на центральной полосе движения дороги D1 позади другого транспортного средства V3d. Аналогичным образом, в случае опасности создания помехи другим транспортным средством V4x, показанным на Фиг.10, местоположение, в котором другое транспортное средство V4x сталкивается с опасностью, является местоположением позади другого транспортного средства V4e, которое является концом дорожного затора в ожидании поворота направо на дороге D1. Тогда полоса движения, соответствующая местоположению позади другого транспортного средства V4e, то есть полоса движения, смежная с правой полосой движения дороги D1, является центральной полосой движения дороги D1. Таким образом, в этом случае вторичный оценочный уровень опасности, полученный в результате маневра движения по избеганию дорожного затора от других транспортных средств V4a-V4e, ожидающих поворота направо, размещен на центральной полосе движения дороги D1 позади другого транспортного средства V4e.
[0065]
Затем будет приведено описание еще одного транспортного средства V5x, показанного на Фиг.10. Предполагается, что, в отличие от других транспортных средств V2x, V3x и V4x, другое транспортное средство V5x поворачивает налево на перекрестке C, и другое транспортное средство V5, остановившееся на левой стороне, присутствует в полосе движения, на которую другое транспортное средство V5x поворачивает налево. В этом случае, если другое транспортное средство V5x выезжает на левую полосу движения среди полос движения назначения для поворота налево, другое транспортное средство V5x сталкивается с остановившимся другим транспортным средством V5 и не может продолжать движение по левой полосе движения. Кроме того, чтобы продолжить движение, другое транспортное средство V5x должно перестроиться с левой полосы движения на правую полосу движения дороги D2 позади остановившегося другого транспортного средства V5. Следовательно, чтобы избежать остановившееся другое транспортное средство V5 перед поворотом налево, а не после поворота налево, и продолжить движение без смены полосы движения после поворота налево, как показано на Фиг.10, например, предсказывается, что другое транспортное средство V5x въедет в правую полосу из полос движения назначения для поворота налево. То есть предсказанный маневр движения другого транспортного средства V5x, которое избегает опасность, представляет собой въезд на правую полосу движения дороги D2 при повороте налево.
[0066]
Здесь, на Фиг.10 предполагается, что задействуемое транспортное средство V1a собирается повернуть направо на перекрестке C. Если другое транспортное средство V5x въезжает на правую полосу движения дороги D2 при повороте налево в соответствии с предсказанным маневром движения, другое транспортное средство V5x выедет впереди задействуемого транспортного средства V1, в то время как задействуемое транспортное средство V1 поворачивает направо на перекрестке C. То есть при повороте направо на перекрестке C задействуемому транспортному средству V1 может быть создана помеха другим транспортным средством V5x, которое избегает остановившееся другое транспортное средство V5. Блок 1609 генерирования вторичного оценочного уровня опасности воспринимает возможность создания помехи другим транспортным средством V5x как опасность и вычисляет вторичный оценочный уровень опасности на основе этой опасности.
[0067]
Когда опасность создания помехи другим транспортным средством V5x на перекрестке C размещена как вторичный оценочный уровень опасности на карте предсказанных опасностей, положение, в котором размещен вторичный оценочный уровень опасности, находится, например, в области, в которой другое транспортное средство V5x движется по перекрестку C. В качестве альтернативы или в дополнение к этому, при условии, что задействуемое транспортное средство V1a поворачивает направо, когда перекресток C расположен позади первичного оценочного уровня опасности, размещенного в полосе движения после поворота направо по отношению к направлению движения задействуемого транспортного средства V1a, положение, в котором размещен вторичный оценочный уровень опасности, представляет собой, например, крайнюю правую полосу движения, в которой существует первичный оценочный уровень опасности, среди полос движения после поворота направо. В сцене движения, показанной на Фиг.10, остановившееся другое транспортное средство V5 присутствует в левой полосе движения дороги D2 после поворота направо, и перекресток С существует позади задействуемого транспортного средства V1a, которое поворачивает направо относительно направления движения задействуемого транспортного средства V1a. В этом случае вторичный оценочный уровень опасности размещен в правой полосе движения дороги D2. В качестве альтернативы или в дополнение к правой полосе движения дороги D2, по которой движется задействуемое транспортное средство V1 после поворота направо на перекрестке C, среди полос движения на перекрестке C, по которым может двигаться задействуемое транспортное средство V1 при повороте направо (обозначаемых как «полосы движения в течение поворота направо»), в полосе движения, в которой отсутствует первичный оценочный уровень опасности, может быть размещен вторичный оценочный уровень опасности.
[0068]
Здесь, когда дорога D2 после поворота направо включает в себя три или более полос движения, имеются две или более полос движения, отличных от полосы движения, в которой существует первичный оценочный уровень опасности, то есть две или более полос движения, в которых может быть размещен вторичный оценочный уровень опасности. В этом случае вторичный оценочный уровень опасности может быть размещен в полосе движения, ближайшей к первичному оценочному уровню опасности, среди полос движения, отличных от полосы движения, в которой существует первичный оценочный уровень опасности. Например, в сцене движения, показанной на Фиг.10, когда дорога D2 включает в себя левую полосу движения, центральную полосу и правую полосу движения, вторичный оценочный уровень опасности размещен на центральной полосе движения дороги D2. Дополнительно или в качестве альтернативы опасность может быть увеличена у полосы движения с вторичным оценочным уровнем опасности вблизи первичного оценочного уровня опасности среди вторичных оценочных уровней опасности, размещенных в двух или более полосах движения, по отношению к направлению движения задействуемого транспортного средства V1a. Например, в сцене движения, показанной на Фиг.10, когда дорога D2 включает в себя левую полосу движения, центральную полосу и правую полосу движения, вторичный оценочный уровень опасности размещен в центральной полосе движения и правой полосе движения, и вторичный оценочный уровень опасности центральной полосы движения вблизи первичного оценочного уровня опасности левой полосы движения может быть установлен больше, чем вторичный оценочный уровень опасности правой полосы движения.
[0069]
В сцене движения, показанной на Фиг.10, предполагается, что задействуемое транспортное средство V1a поворачивает направо, но также, когда задействуемое транспортное средство V1a поворачивает налево, вторичный оценочный уровень опасности может быть размещен в том же положении, что и при повороте задействуемого транспортного средства V1a направо. То есть при условии, что задействуемое транспортное средство V1 поворачивает налево, когда перекресток С расположен позади первичного оценочного уровня опасности, размещенного в полосе движения после поворота налево по отношению к направлению движения задействуемого транспортного средства V1, вторичный оценочный уровень опасности размещен в полосе движения, отличной от крайней левой полосы движения, в которой существует первичный оценочный уровень опасности, среди полос движения после поворота налево. Например, на Фиг.10 предполагается, что задействуемое транспортное средство V1 поворачивает налево из положения другого транспортного средства V5x по тому же маршруту R движения, что и другое транспортное средство V5x, а другое транспортное средство V5x поворачивает направо на перекрестке C из положения задействуемого транспортного средства V1a. В этом случае перекресток С существует позади задействуемого транспортного средства V1 после поворота налево по отношению к направлению движения задействуемого транспортного средства V1, и остановившееся другое транспортное средство V5 присутствует на левой полосе движения дороги D2 после поворота налево. Следовательно, вторичный оценочный уровень опасности размещен в полосе движения, отличной от левой полосы движения, которая является левой полосой движения дороги D2, то есть в правой полосе движения. Здесь два или более вторичных оценочных уровня опасности могут быть установлены в соответствии с количеством полос движения после поворота налево. В этом случае, как и в случае поворота направо, описанного выше, опасность может быть увеличена у полосы движения с вторичным оценочным уровнем опасности вблизи первичного оценочного уровня опасности, среди вторичных оценочных уровней опасности, размещенных в двух и более полосах движения, относительно направления движения задействуемого транспортного средства V1. Дополнительно или в качестве альтернативы, вторичный оценочный уровень опасности может быть размещен в полосе движения, ближайшей к первичному оценочному уровню опасности, среди двух или более полос движения. В качестве альтернативы или в дополнение к правой полосе движения дороги D2, по которой может двигаться задействуемое транспортное средство V1 после поворота налево на перекрестке C, среди полос движения на перекрестке C, по которым движется задействуемое транспортное средство V1 при повороте налево (обозначаемых как «полосы движения в течение поворота налево»), в полосе движения, в которой отсутствует первичный оценочный уровень опасности, может быть размещен вторичный оценочный уровень опасности.
[0070]
Описанное выше положение размещения вторичного оценочного уровня опасности при повороте направо или налево исходит из предположения, что дорога является левосторонней. Когда дорога является правосторонней, правое и левое следует читать симметрично в приведенном выше описании, и положение размещения вторичного оценочного уровня опасности устанавливается симметрично по отношению к случаю левостороннего движения.
[0071]
При размещении вторичного оценочного уровня опасности на карте предсказанных опасностей необходимо дополнительно к положению вычислить величину. Здесь значение вторичного оценочного уровня опасности выводится из маневра движения в целях избегания опасности, обусловленной первичным оценочным уровнем опасности, и, следовательно, может быть вычислено с использованием значения первичного оценочного уровня опасности. Величина вторичного оценочного уровня опасности может быть вычислена, например, как значение, полученное посредством умножения значения первичного оценочного уровня опасности, соответствующего опасности, которую следует избежать, на предварительно определенное значение (например, 0,8). Предварительно определенное значение может быть изменено в соответствии с классификацией опасности, например, 0,8, когда опасность, которую следует избежать, классифицируется как опасность А, 0,6, когда опасность, которую следует избежать, классифицируется как опасность В, 0,4, когда опасность, которую следует избежать, классифицируется как опасность C, или 0,2, когда опасность, которую следует избежать, классифицируется как опасность D. Например, как показано на Фиг.9, первичный оценочный уровень опасности полосы 1 движения дорожного участка 0001 вычисляется как 100×66%+80×100%+50×0%=14600. В этом случае вторичный оценочный уровень опасности полосы 1 движения дорожного участка 0001 вычисляется, например, как 100×66%×0,8+80×100%×0,6+50×0%×0,4=10080. В качестве альтернативы или в дополнение к этому величина вторичного оценочного уровня опасности может быть увеличена пропорционально величине первичного оценочного уровня опасности, соответствующего опасности, которую следует избежать. Когда первичный оценочный уровень опасности и вторичный оценочный уровень опасности обусловлены одной и той же опасностью, значение вторичного оценочного уровня опасности меньше, чем значение первичного оценочного уровня опасности, поскольку первое получается посредством умножения первичного оценочного уровня опасности на предварительно определенный коэффициент.
[0072]
Дополнительно или альтернативно, подобно первичному оценочному уровню опасности, вторичный оценочный уровень опасности может быть получен для каждой полосы движения каждого дорожного участка, разделенного в направлении продолжения дороги. Вторичный оценочный уровень опасности получают для каждого дорожного участка, разделенного, например, на 100 м по отношению к направлению продолжения дороги, а для дороги, имеющей множество полос движения, получают для каждой полосы движения. Во второй смежной полосе движения, которая является смежной по отношению к смежной полосе движения, в которой размещен вторичный оценочный уровень опасности, вторичный оценочный уровень опасности может использоваться для получения третичного или более высокого предсказанного уровня опасности.
[0073]
Как описано выше, в блоке 1605 генерирования карты предсказанных опасностей получают первичный оценочный уровень опасности и вторичный оценочный уровень опасности для каждого положения движения, и генерируют карту предсказанных опасностей, в которой первичный оценочный уровень опасности и вторичный оценочный уровень опасности изложены в картографической информации. Фиг.11 представляет собой вид сверху, иллюстрирующий пример карты предсказанных опасностей, сгенерированной блоком 1605 генерирования карты предсказанных опасностей с Фиг.3 для маршрута R движения с Фиг.6. На Фиг.11 показано, что чем темнее цвет полосы движения, тем больше первичный и вторичный оценочный уровень опасности. Самый темный маршрут движения - это встречная полоса движения, что указывает на то, что задействуемое транспортное средство V1 не может двигаться.
[0074]
Маршруты движения, которые не являются полосами встречного движения и по которым может двигаться задействуемое транспортное средство V1, включают в себя маршрут движения со вторым самым темным цветом, маршрут движения с третьим самым темным цветом и маршрут движения без цвета. Например, на левой полосе D11 движения дороги D1 часто возникает дорожный затор от других транспортных средств V3a-V3d, ожидающих поворота налево, так что первичный оценочный уровень опасности, полученный блоком 1608 генерирования первичного оценочного уровня опасности является большим значением, и поэтому второй самый темный цвет присваивается положению, в котором возникает дорожный затор. Кроме того, на левой полосе D11 движения дороги D1 другие транспортные средства V2a и V2b часто припаркованы на обочине дороги, так что первичный оценочный уровень опасности, полученный блоком 1608 генерирования первичного оценочного уровня опасности, имеет большое значение, и таким образом, второй самый темный цвет присваивается положениям остановки на обочине дороги. Аналогичным образом, на правой полосе D13 движения дороги D1 часто возникает затор других транспортных средств V4a-V4e, ожидающих поворота направо, так что первичный оценочный уровень опасности, полученный блоком 1608 генерирования первичного оценочного уровня опасности, представляет собой большое значение, поэтому второй самый темный цвет присваивается положению, в котором возникает дорожный затор. Кроме того, на левой полосе D21 движения дороги D2 часто присутствует припаркованное транспортное средство, так что первичный оценочный уровень опасности, полученный блоком 1608 генерирования первичного оценочного уровня опасности, является большим значением, и, следовательно, присваивается второй самый темный цвет.
[0075]
С другой стороны, что касается центральной полосы D12 движения дороги D1, первичный оценочный уровень опасности, относящийся к обнаруженному объекту, мал. Однако участок центральной полосы D12 движения рядом с перекрестком С имеет большой уровень опасности в том смысле, что задействуемое транспортное средство V1 должно сменить полосу (перестроиться) на полосу D14 движения только для поворота направо, и поэтому присваивается второй самый темный цвет. Аналогичным образом, участок правой полосы D13 движения рядом с перекрестком С имеет большой уровень опасности в том смысле, что задействуемое транспортное средство V1 должно перестроиться на полосу D14 движения только для поворота направо, и поэтому присваивается второй самый темный цвет. В дополнение к этому, в центральной полосе D12 движения дороги D1 третий самый темный цвет присваивается за вторыми самыми темными цветами, соответствующими первичному оценочному уровню опасности, которые присвоены левой полосе D11 движения и правой полосе D13 движения. Это обусловлено тем, что вторичный оценочный уровень опасности, полученный блоком 1609 генерирования вторичного оценочного уровня опасности, имеет большое значение.
[0076]
Что касается правой полосы D22 движения дороги D2, то первичный оценочный уровень опасности, относящийся к обнаруженному объекту, мал. Однако, участок D22a правой полосы D22 движения рядом с точкой разветвления на дорогу D3 имеет большой уровень опасности в том смысле, что задействуемое транспортное средство V1 должно перестроиться с полосы движения на левую полосу движения, и поэтому присваивается второй самый темный цвет. Участок D21a дороги D2 после прохождения через точку разветвления на дорогу D3 также имеет большой уровень опасности в том смысле, что задействуемое транспортное средство V1 должно перестроиться в левую полосу движения, и поэтому присваивается второй самый темный цвет. В дополнение к этому, в правой полосе D22 движения дороги D2 третий самый темный цвет присваивается второму самому темному цвету, соответствующему первичному оценочному уровню опасности, который присвоен левой полосе D21 движения дороги D2. Этот третий самый темный цвет, присвоенный правой полосе D22 движения, продолжается до перекрестка C. Это обусловлено тем, что, когда присутствует транспортное средство V5x с поворотом налево, которое обращено к задействуемому транспортному средству V1a, поворачивающему направо, существует опасность того, что задействуемому транспортному средству V1a будет создана помеха впереди во время поворота направо, и, следовательно, вторичный оценочный уровень опасности, полученный блоком 1609 генерирования вторичного оценочного уровня опасности, имеет большое значение.
[0077]
Блок 1613 определения действий с Фиг.3 относится к карте предсказанных опасностей, показанной на Фиг.11, и выбирает маршрут движения с наименьшим уровнем опасности при движении по маршруту R1→R2→R3→R4 движения на Фиг.6. Здесь при движении по маршруту R1→R2→R3→R4 движения на Фиг.6, нет необходимости двигаться в непосредственной близости от положения движения (вблизи местоположения столкновения с обнаруженным объектом), то есть по той же полосе движения, и сюда включен случай движения по той же дороге. Первичный оценочный уровень опасности и вторичный оценочный уровень опасности вычисляются, по меньшей мере, перед движением в положении движения (местоположении столкновения с обнаруженным объектом). Фиг.12 иллюстрирует окончательный маршрут движения R1a→R2a→Ra3→R4a, который, таким образом, устанавливается с учетом первичного и вторичного оценочных уровней опасности. С другой стороны, Фиг.14 иллюстрирует маршрут движения R1x→R2x→R3x→R4x в соответствии со сравнительным примером, который установлен при условии текущего положения P1 до пункта Px назначения без учета первичного оценочного уровня опасности или вторичного оценочного уровня опасности. Фиг.12 представляет собой вид сверху, иллюстрирующий окончательный маршрут Ra движения, который определяется блоком 1613 определения действий с Фиг.3 для маршрута R движения с Фиг.6 и Фиг.14 иллюстрирует сравнительный пример по отношению к варианту осуществления с Фиг.12, и представляет собой вид сверху, иллюстрирующий окончательный маршрут Rx движения, который определяется с использованием только карты присутствующих опасностей, полученной блоком 1611 генерирования карты присутствующих опасностей с Фиг.3.
[0078]
Сравнивая маршрут Ra движения согласно варианту осуществления настоящего изобретения с Фиг.12 с маршрутом Rx движения в соответствии со сравнительным примером для настоящего изобретения на Фиг.14, сначала, время смены полосы движения из текущего положения P1 задействуемого транспортного средства V1 на центральную полосу движения, правую полосу движения и полосу движения только для поворота направо перед перекрестком C отличается. То есть в сравнительном примере, показанном на Фиг.14, маршрут R1x движения для смены полосы движения в обычное время смены полосы движения устанавливается на основе скорости транспортного средства задействуемого транспортного средства V1 и расстояния или времени, необходимого для смены полосы движения; следовательно, в некоторых случаях задействуемое транспортное средство V1 может остановиться позади другого транспортного средства V2b, которое остановилось в левой полосе движения дороги D1, до тех пор, пока не завершится смена полосы движения следующего за ним транспортного средства, которое уже начало перестроение, или задействуемое транспортное средство V1 может следовать за самым задним другим транспортным средством V3d в дорожном заторе, который возникает на левой полосе движения дороги D1, в ожидании поворота налево.
[0079]
С другой стороны, в варианте осуществления, показанном на Фиг.12, остановившиеся другие транспортные средства V2a и V2b, которые, вероятно, будут присутствовать в левой полосе движения дороги D1, и дорожный затор в ожидании поворота налево, который, вероятно, произойдет, предсказываются, поскольку первичный оценочный уровень опасности, проиллюстрированный как D11 на Фиг.11, является высоким, и установленный маршрут R1a движения, следовательно, является маршрутом для смены полосы движения на центральную полосу движения до дорожного затора на левой полосе движения дороги D1. Кроме того, в варианте осуществления, показанном на Фиг.12, опасность создания помехи другим транспортным средством из-за остановившихся других транспортных средств V2a и V2b, которые, вероятно, будут находиться в левой полосе движения дороги D1, и из-за дорожного затора в ожидании поворота налево, что вероятно произойдет, предсказывается, поскольку вторичный оценочный уровень опасности, показанный как D12 на Фиг.11, имеет высокий уровень, и установленный маршрут R1a движения представляет собой маршрут, по которому другое транспортное средство V2x, избегая остановившиеся другие транспортные средства V2a и V2b, меняет полосу движения с центральной полосы движения на правую полосу движения и находится в направлении избегания вторичного оценочного уровня опасности перед въездом на центральную полосу движения с левой полосы движения из-за смены полос движения. Это позволяет задействуемому транспортному средству плавно перестроиться в полосу только для поворота направо, не останавливаясь позади другого транспортного средства V2b, которое остановилось в левой полосе движения дороги D1, до завершения смены полосы движения следующего за ним транспортного средства, которое уже начало перестроение, или не следуя позади самого заднего транспортного средства V3d в дорожном заторе, который возникает в левой полосе движения дороги D1 в ожидании поворота налево.
[0080]
Еще одно отличие при сравнении маршрута Ra движения согласно варианту осуществления настоящего изобретения, показанному на Фиг.12 с маршрутом Rx движения в соответствии со сравнительным примером для настоящего изобретения на Фиг.14 показан способ въезда на дорогу D2 после поворота направо на перекрестке С. В сравнительном примере, показанном на Фиг.14 задействуемое транспортное средство сначала въезжает на левую полосу движения дороги D2 после поворота направо на перекрестке С, поскольку задействуемое транспортное средство установлено на движение по левой полосе движения, как правило, при движении по дороге. Однако впереди находится припаркованное транспортное средство V5, и задействуемое транспортное средство, следовательно, следует по маршруту R3x движения, чтобы один раз перестроиться в правую полосу движения, чтобы избежать припаркованное транспортное средство V5, а затем снова перестроиться в левую полосу движения.
[0081]
С другой стороны, в варианте осуществления, показанном на Фиг.12, высокая вероятность того, что припаркованное транспортное средство V5 находится в левой полосе движения дороги D2, предсказывается первичным оценочным уровнем опасности, показанным как D21 на Фиг.11 и является высокой, и установленный маршрут R3a движения, таким образом, является маршрутом движения, по которому задействуемое транспортное средство поворачивает направо на перекрестке C, затем непосредственно въезжает на правую полосу движения дороги D2, затем опережает припаркованное транспортное средство на левой полосе движения, а затем перестраивается на левую полосу движения. Это устраняет необходимость перестроения с левой полосы движения на правую полосу движения на дороге D2.
[0082]
В общем, транспортное средство, в котором управление содействию движению, такое как автономное вождение, выполняется для движения, управляется для движения с использованием датчиков, предусмотренных в транспортном средстве для движения, с использованием информации, обнаруженной датчиками. Поэтому используются информация, полученная датчиками, и высокоточная информация информации, полученной датчиком, например, информация на короткой дальности от задействуемого транспортного средства, и информация, которая может быть использована для управления содействием движению, ограничена. Однако, к счастью, в варианте осуществления, показанном на Фиг.12, первичный и вторичный оценочные уровни опасности используются как информация, не полученная датчиками, и/или как информация, дополняющая информацию, полученную датчиками, что приводит к предсказанию ситуации в положении, удаленном от задействуемого транспортного средства, например, для предварительной смены полосы движения и выбора оптимальной полосы движения.
[0083]
Обращаясь снова к Фиг.3, блок 160 вычисления маршрута настоящего варианта осуществления дополнительно включает в себя блок 1610 изучения карты присутствующих опасностей, блок 1611 генерирования карты присутствующих опасностей и блок 1612 объединения карт опасностей. Блок 1610 изучения карты присутствующих опасностей генерирует обеспечивающий траекторию уровень для генерирования карты присутствующей опасности.
[0084]
Когда человек-водитель видит объект, такой как припаркованный автомобиль, в дорожной обстановке, водитель думает о том, что делать, чтобы справиться с объектом или по какому маршруту проехать, а не о том, как далеко от объекта нужно держать дистанцию. Чтобы смоделировать такой механизм, блок 1610 изучения карты присутствующих опасностей генерирует из данных вождения обеспечивающий траекторию уровень для отображения карты присутствующих опасностей. То есть обеспечивающий траекторию уровень генерируется в реальном времени для каждой классификации каждого фактически обнаруженного объекта, такого как, например, транспортное средство, пешеход или велосипед. Он включает в себя уровень непригодного пространства для предотвращения столкновения, уровень пригодного пространства для обеспечения желаемой траектории и уровень скорости для обеспечения подходящей целевой скорости. Кроме того, когда исследовательский автомобиль взаимодействует с различными участниками дорожного движения в каждой категории, их траектории изучаются с использованием данных о естественном вождении. При обработке в режиме реального времени обеспечивающий траекторию уровень используется для вычисления желаемой локальной траектории и целевого профиля скорости.
[0085]
На основе обеспечивающего траекторию уровня, полученного от блока 1610 изучения карты присутствующих опасностей, который предварительно изучен для каждой классификации, и результата классификации участников дорожного движения вокруг задействуемого транспортного средства, блок 1611 генерирования карты присутствующих опасностей применяет обеспечивающий траекторию уровень каждого участника движения вокруг задействуемого транспортного средства в соответствии с классификацией для генерирования карты присутствующих опасностей. Карта предсказанных опасностей, сгенерированная блоком 1605 генерирования карты предсказанных опасностей, получается посредством предсказывания уровня опасности на основе прошлого опыта с использованием характеристического значения вероятности столкновения, тогда как карта присутствующих опасностей, сгенерированная блоком 1611 генерирования карты присутствующих опасностей, получается посредством вычисления уровня опасности для объекта, обнаруженного в течение фактического движения по маршруту движения. Это позволяет выполнять соответствующее содействие движению на основе присутствующего уровня опасности, когда объект случайно или внезапно обнаруживается на дорожном участке или полосе движения, на которых первичный оценочный уровень опасности и вторичный оценочный уровень опасности являются низкими, например, из-за низкой вероятности столкновения с обнаруженным объектом. Когда присутствующий уровень опасности и первичный оценочный уровень опасности обусловлены одной и той же опасностью, присутствующий уровень опасности, вычисленный для обнаруженной опасности, больше, чем первичный оценочный уровень опасности для данной опасности. Это связано с тем, что первичный оценочный уровень опасности является уровнем опасности, предсказанным с использованием характеристического значения вероятности столкновения для этого уровня опасности.
[0086]
Затем блок 1612 объединения карт опасностей генерирует объединенную карту опасностей, в которую объединены карта предсказанных опасностей, сгенерированная блоком 1605 генерирования карты предсказанных опасностей, и карта присутствующих опасностей, сгенерированная блоком 1611 генерирования карты присутствующих опасностей. В частности, блок 1612 объединения карт опасностей обнаруживает объект вокруг задействуемого транспортного средства при фактическом вождении задействуемого транспортного средства и после обнаружения объекта, такого как препятствие, получает присутствующий уровень опасности объекта, обнаруженный блоком 1611 генерирования карты присутствующих опасностей. Затем первичный оценочный уровень опасности и вторичный оценочный уровень опасности сравниваются с присутствующим уровнем опасности, и объединенная карта опасностей генерируется на основе большего уровня опасности, чтобы содействовать движению транспортного средства, например, установить полосу движения, в которой двигаться задействуемому транспортному средству V1.
[0087]
Далее будут описаны блок 1614 обнаружения избегающего опасность транспортного средства и блок 1615 генерирования уровня опасности избегающего опасность транспортного средства, показанные на Фиг.3. При фактическом движении по маршруту Ra движения блок 1614 обнаружения избегающего опасность транспортного средства использует информацию об окружающих объектах, которая передается из блока 1601 получения траекторий окружающих объектов, для обнаружения другого транспортного средства, которое избегает опасность, обусловленную первичным оценочным уровнем опасности. Например, в сцене движения, показанной на Фиг.10, блок 1614 обнаружения избегающего опасность транспортного средства обнаруживает из информации об объектах, которые блок 1601 получения траекторий окружающих объектов обнаруживает с использованием датчиков 1, таких как камера и датчик дальности, другое транспортное средство V2x, которое избегает остановившихся других транспортных средств V2a, и V2b, другое транспортное средство V3x, которое избегает дорожный затор от других транспортных средств V3a-V3d, ожидающих поворота налево, другое транспортное средство V4x, которое избегает дорожный затор других транспортных средств V4a-V4e, ожидающих поворота направо, и другое транспортное средство V5x, которое поворачивает налево, чтобы въехать на правую полосу движения дороги D2.
[0088]
Блок 1615 генерирования уровня опасности избегающего опасность транспортного средства вычисляет уровень опасности, полученный от другого транспортного средства, которое избегает опасность, обусловленную первичным оценочным уровнем опасности. Другое транспортное средство обнаруживается при фактическом движении по маршруту Ra движения. Например, в сцене движения, показанной на Фиг.10, когда блок 1614 обнаружения избегающего опасность транспортного средства фактически обнаруживает в течение движения другое транспортное средство V2x, которое избегает остановившиеся другие транспортные средства V2a и V2b, блок 1615 генерирования уровня опасности избегающего опасность транспортного средства вычисляет уровень опасности избегающего опасность транспортного средства, выеденный из фактически обнаруженного другого транспортного средства V2x, который выше, чем вторичный оценочный уровень опасности, соответствующий первичному оценочному уровню опасности, обусловленному остановившимися другими транспортными средствами V2a и V2b.
[0089]
Блок 1609 генерирования вторичного оценочного уровня опасности получает вторичный оценочный уровень опасности с использованием предсказанного маневра движения, независимо от того, существует ли или нет другое транспортное средство, которое избегает опасность. С другой стороны, блок 1615 генерирования уровня опасности избегающего опасность транспортного средства получает уровень опасности избегающего опасность транспортного средства, который выше, чем вторичный оценочный уровень опасности, когда блок 1614 обнаружения избегающего опасность транспортного средства фактически обнаруживает другое транспортное средство, которое избегает опасность, обусловленную первичным оценочным уровнем опасности. Таким образом с использованием вторичного оценочного уровня опасности и уровня опасности избегающего опасность транспортного средства, можно дополнительно избежать любую опасность, которая может возникнуть, по сравнению с тем, когда используется только вторичный оценочный уровень опасности.
[0090]
Уровень опасности избегающего опасность транспортного средства, получается посредством использования предсказанного маневра движения другого транспортного средства, которое избегает опасность, обусловленную первичным оценочным уровнем опасности, как и в случае вторичного оценочного уровня опасности. Таким образом, положение, в котором размещен уровень опасности избегающего опасность транспортного средства, является, например, тем же самым положением, что и для вторичного оценочного уровня опасности, соответствующего первичному оценочному уровню опасности. В качестве альтернативы или в дополнение к этому, положение, в котором размещен уровень опасности избегающего опасность транспортного средства, может быть расположено позади местоположения, в котором произойдет столкновение с опасностью, обусловленной первичным оценочным уровнем опасности, в смежной полосе движения по отношению к полосе, соответствующей местоположению, в котором произойдет столкновение с опасностью.
[0091]
Дополнительно или альтернативно, величина уровня опасности избегающего опасность транспортного средства может быть вычислена, когда блок 1614 обнаружения избегающего опасность транспортного средства фактически обнаруживает другое транспортное средство, которое избегает опасность, обусловленную первичным оценочным уровнем опасности, например, посредством взвешивания вторичного оценочного уровня опасности, соответствующего первичному оценочному уровню опасности. Например, когда первичный оценочный уровень опасности вычисляется как 100×66%+80×100%+50×0%=14600 в полосе 1 движения дорожного участка 0001 на Фиг.9, а вторичный оценочный уровень опасности вычисляется как 100×66%×0,8+80×100%×0,6+50×0%×0,4=10080 в полосе 2 движения дорожного участка 0001, уровень опасности избегающего опасность транспортного средства в полосе 2 движения дорожного участка 0001 вычисляется как 10080×1,5=15120, например, посредством умножения вторичного оценочного уровня опасности на 1,5.
[0092]
Вычисленный уровень опасности избегающего опасность транспортного средства может быть интегрирован в карту опасностей. Например, блок 1612 объединения карт опасностей отражает уровень опасности избегающего опасность транспортного средства в карте предсказанных опасностей, которая генерируется блоком 1605 генерирования карты предсказанных опасностей, а затем объединяет ее с картой присутствующих опасностей, которая генерируется блок 1611 генерирования карты присутствующих опасностей, чтобы сгенерировать объединенную карту опасностей. Блок 1612 объединения карт опасностей сравнивает первичный оценочный уровень опасности, вторичный оценочный уровень опасности, присутствующий уровень опасности и уровень опасности избегающего опасность транспортного средства друг с другом и генерирует на основе наивысшего уровня опасности объединенную карту опасностей, чтобы содействовать движению транспортного средства, например, устанавливать полосу движения, по которой двигаться задействуемому транспортному средству V1.
[0093]
Далее будет описан план движения при вычислении уровня опасности избегающего опасность транспортного средства. Когда блок 1614 обнаружения избегающего опасность транспортного средства фактически обнаруживает другое транспортное средство V2x, которое избегает опасность, обусловленную первичным оценочным уровнем опасности, и блок 1615 генерирования уровня опасности избегающего опасность транспортного средства вычисляет уровень опасности избегающего опасность транспортного средства, блок 160 вычисления маршрута настоящего варианта осуществления определяет, можно ли или нет избежать опасность, обусловленную обнаруженным другим транспортным средством V2x. Затем, когда определено, что опасность, обусловленную другим транспортным средством V2x, можно избежать, выполняется смена полосы движения для избегания опасности.
[0094]
Например, в сцене движения, показанной на Фиг.12, предполагается, что впереди идущее транспортное средство находится впереди задействуемого транспортного средства V1, которое движется по левой полосе движения дороги D1, и впереди идущее транспортное средство движется по той же левой полосе движения, что и задействуемое транспортное средство V1. Также предполагается, что впереди идущее транспортное средство столкнется с остановившимися другими транспортными средствами V2a и V2b в течение движения и сменит полосу движения с левой полосы движения дороги D1 на центральную полосу движения, чтобы продолжить движение. В этом случае блок 1614 обнаружения избегающего опасность транспортного средства, обнаруживает впереди идущее транспортное средство как транспортное средство, которое избегает остановившиеся другие транспортные средства V2a и V2b. Затем, на основе предсказанного маневра движения при смене полосы движения с левой полосы движения дороги D1 на центральную полосу движения, блок 1615 генерирования уровня опасности избегающего опасность транспортного средства вычисляет уровень опасности избегающего опасность транспортного средства, который размещен позади другого транспортного средства V2b, например, на центральной полосе движения дороги D1. В этом случае задействуемое транспортное средство V1 движется, например, по маршруту R1a движения, с тем чтобы сменить полосы движения с центральной полосы движения на правую полосу движения, прежде чем столкнуться с уровнем опасности избегающего опасность транспортного средства, и может избежать опасность создания помехи другим транспортным средством V2x.
[0095]
С другой стороны, когда делается определение, что опасность, обусловленная уровнем опасности избегающего опасность транспортного средства, такого как другое транспортное средство V2x, невозможно избежать и с опасностью будет столкновение, блок 160 вычисления маршрута настоящего варианта осуществления вычисляет новый план движения, чтобы исключить опасность, прежде чем столкнуться с опасностью. Сцена, в которой невозможно избежать опасность, обусловленную уровнем опасности избегающего опасность транспортного средства, и новый план движения для исключения опасности будет описан ниже со ссылкой на Фиг.13А и 13В.
[0096]
Фиг.13А представляет собой вид сверху, иллюстрирующий пример сцены движения, в которой нельзя избежать опасность, обусловленную уровнем опасности избегающего опасность транспортного средства. В сцене движения, показанной на Фиг.13A, предполагается, что задействуемое транспортное средство V1 движется от текущего положения P1 до пункта Px назначения по маршруту R движения, показанному на Фиг.6. В сцене движения, показанной на Фиг.13A, также предполагается, что, как и в сцене движения, показанной на Фиг.7, остановившиеся другие транспортные средства V2a и V2b присутствуют на обочине дороги в левой полосе движения дороги D1, и дорожный затор возникает из-за других транспортных средств V3a-V3d, ожидающих поворота налево. Также предполагается, что дорожный затор возникает на правой полосе движения и полосе движения только для поворота направо дороги D1 из-за других транспортных средств V4a-V4e, которые ожидают поворота направо, и другое транспортное средство V5, остановившееся на обочине дороги, присутствует в левой полосе движения дороги D2. В сцене движения, показанной на Фиг.13A, дополнительно предполагается, что имеется не проезжаемая область X, такая как дорожное сооружение в правой полосе движения дороги D1, и впереди идущее транспортное средство Y, которое движется по левой полосе движения той же дороги D1, что и задействуемое транспортное средство V1, присутствует впереди задействуемого транспортного средства V1.
[0097]
В сцене движения, показанной на Фиг.13А, задействуемое транспортное средство V1 должно повернуть направо на перекрестке С, чтобы достичь пункта Рх назначения. Следовательно, для того чтобы задействуемое транспортное средство V1 достигло полосы движения только для поворота направо дороги D1, блок 160 вычисления маршрута вычисляет маршрут движения, например, от текущего положения P1 до самого заднего другого транспортного средства V4e в дорожном заторе в ожидании поворота направо. В этом случае блок 160 вычисления маршрута вычисляет, например, маршруты R1b и R1c движения, показанные на Фиг.13А. Маршруты R1b и R1c движения вычисляются таким образом, чтобы максимально избежать первичный оценочный уровень опасности и вторичный оценочный уровень опасности из-за остановившихся других транспортных средств V2a и V2b и дорожных заторов в ожидании поворота направо и поворота налево.
[0098]
Здесь при движении по маршруту R1b движения задействуемое транспортное средство V1 должно двигаться по центральной полосе движения дороги D1 до задней части остановившегося другого транспортного средства V2b. Однако впереди идущее транспортное средство Y находится впереди задействуемого транспортного средства V1, а остановившиеся другие транспортные средства V2a и V2b находятся перед впереди идущим транспортным средством Y. Поэтому предсказывается, что впереди идущее транспортное средство Y избегает другие транспортные средства V2a и V2b, изменяя полосы движения с левой полосы движения дороги D1 на центральную полосу движения, чтобы продолжить движение. В этом случае блок 1614 обнаружения избегающего опасность транспортного средства, обнаруживает впереди идущее транспортное средство Y как другое транспортное средство, которое избегает другие транспортные средства V2a и V2b. Затем на основе предсказанного маневра движения впереди идущего транспортного средства Y для смены полосы движения с левой полосы движения дороги D1 на центральную полосу движения блок 1615 генерирования уровня опасности избегающего опасность транспортного средства вычисляет уровень опасности избегающего опасность транспортного средства, расположенного позади другого транспортного средства V2b, например, на центральной полосе движения дороги D1. Следовательно, при движении по маршруту R1b движения в сцене движения, показанной на Фиг.13A, задействуемое транспортное средство V1 не может избежать опасность создания помехи впереди идущим транспортным средством Y впереди в направлении движения по центральной полосе движения дороги D1, то есть опасность, обусловленную уровнем опасности избегающего опасность транспортного средства.
[0099]
В этом случае блок 160 вычисления маршрута определяет, что нельзя избежать опасность создания помехи впереди идущим транспортным средством Y, и вновь вычисляет план движения, который, даже если ему будет создана помеха впереди идущим транспортным средством Y при движении по маршруту R1b движения, может исключить опасность, обусловленную созданием помехи. Блок 160 вычисления маршрута вычисляет, например, новый план движения, в котором задействуемое транспортное средство V1 движется со скоростью транспортного средства, которая меньше скорости транспортного средства, которую устанавливает водитель, на предварительно определенное значение или более. Здесь предварительно определенное значение может быть установлено равным подходящему значению, которое может исключить опасность, обусловленную предсказанным маневром движения другого транспортного средства, которое избегает опасность, такую как помеха. В качестве альтернативы или в дополнение к этому блок 160 вычисления маршрута может вычислить новый план движения таким образом, чтобы расстояние между транспортными средствами между задействуемым транспортным средством V1 и другим транспортным средством, которое избегает опасность, такую как впереди идущее транспортное средство Y, поддерживалось на предварительно определенном расстояние между транспортными средствами и более. Здесь предварительно определенное расстояние между транспортными средствами может быть установлено в подходящее значение, которое может исключить опасность, обусловленную предсказанным маневром движения другого транспортного средства, которое избегает опасность, такое как помеха.
[0100]
Дополнительно или альтернативно, например, когда задействуемое транспортное средство V1 и впереди идущее транспортное средство Y движутся по одной и той же полосе движения, а другое транспортное средство, которое избегает опасность, создает помеху перед впереди идущим транспортным средством Y, блок 160 вычисления маршрута может обратиться к отношению между задействуемым транспортным средством V1 и впереди идущим транспортным средством Y для вычисления нового плана движения, который исключает опасность. Например, блок 160 вычисления маршрута может вычислить новый план движения таким образом, чтобы относительная скорость транспортного средства между задействуемым транспортным средством V1 и впереди идущим транспортным средством Y поддерживалась на предварительно определенной относительной скорости транспортного средства или меньше. Здесь предварительно определенная относительная скорость транспортного средства может быть установлена равной соответствующему значению, которое может исключить опасность, обусловленную предсказанным маневром движения другого транспортного средства, которое избегает опасность. В качестве альтернативы или в дополнение к этому блок 160 вычисления маршрута может вычислить новый план движения таким образом, чтобы расстояние между транспортными средствами между задействуемым транспортным средством V1 и впереди идущим транспортным средством Y поддерживалось на предварительно определенном расстоянии между транспортными средствами или более. Здесь предварительно определенное расстояние между транспортными средствами может быть установлено равным соответствующему значению, которое может исключить опасность, обусловленную предсказанным маневром движения другого транспортного средства, которое избегает опасность.
[0101]
Сцена, в которой невозможно избежать опасность, обусловленную уровнем опасности избегающего опасность транспортного средства, не ограничивается сценой, проиллюстрированной на Фиг.13А, и может произойти, например, когда задействуемое транспортное средство V1 поворачивает направо, как показано на Фиг.13B. Сцена движения, показанная на Фиг.13B, следует за сценой движения, показанной на Фиг.13А, и предполагается, что дорожный затор при ожидании поворота налево, возникший на левой полосе движения дороги D1, и дорожный затор при ожидании поворота направо, возникший на правой полосе движения дороги D1, устранены, и транспортное средство V1 собирается повернуть направо на перекрестке C. Также предполагается, что впереди идущее транспортное средство Y продолжает движение по центральной полосе движения дороги D1 и проезжает прямо через перекресток C. Также предполагается, что другое транспортное средство V5 остановлено на левой полосе движения дороги D2, как в сцене движения, показанной на Фиг.13А. Также предполагается, что, в отличие от сцены движения на Фиг.13А, другое транспортное средство V6, которое поворачивает налево, присутствует на перекрестке С, на котором задействуемое транспортное средство V1 собирается повернуть направо, и обращено к задействуемому транспортному средству V1.
[0102]
В сцене движения, показанной на Фиг.13В, при повороте направо на перекрестке С задействуемое транспортное средство V1 въезжает на правую полосу движения дороги D2 для избегания опасности перестроения с левой полосы движения дороги D2 на правую полосу после поворота направо, чтобы избежать другое транспортное средство V5. С другой стороны, предполагается, что другое транспортное средство V6 въедет на правую полосу движения дороги D2, потому что другое транспортное средство V6 избегает остановившееся другое транспортное средство V5 перед левым поворотом, а не после поворота налево, и продолжает движение, не меняя полосу движения после поворота налево. В этом случае, если другое транспортное средство V6 въезжает на правую полосу движения дороги D2 при повороте налево в соответствии с предсказанным маневром движения, другое транспортное средство V6 может создать помеху впереди задействуемого транспортного средства V1, в то время как задействуемое транспортное средство V1 поворачивает направо на перекрестке C. В этом случае блок 1614 обнаружения избегающего опасность транспортного средства, обнаруживает встречное поворачивающее налево транспортное средство V6 как другое транспортное средство, которое избегает другое транспортное средство V5. Затем, на основе предсказанного маневра движения въезда встречного поворачивающего налево транспортного средства V6 на правую полосу движения дороги D2, блок 1615 генерирования уровня опасности избегающего опасность транспортного средства вычисляет уровень опасности избегающего опасность транспортного средства, который размещен на перекрестке C в положении, показанным третьим самым темным цветом на Фиг.11.
[0103]
В этом случае, например, до того, как задействуемое транспортное средство V1 въедет на перекресток С, блок 160 вычисления маршрута вычисляет план движения, в котором задействуемое транспортное средство V1 не въезжает на перекресток, и, таким образом, может избежать опасность создания помехи встречным поворачивающим налево транспортным средством V6 на перекрестке C. С другой стороны, в этом случае, например, если задействуемое транспортное средство V1 въехало на перекресток C, то задействуемое транспортное средство V1 не может двигаться назад, чтобы вернуться на полосу движения только для поворота направо, и, следовательно, не может избежать опасность создания помехи встречным поворачивающим налево транспортным средством V6 на перекрестке С, то есть опасности, обусловленной уровнем опасности избегающего опасность транспортного средства. Таким образом, когда невозможно избежать опасность, обусловленную уровнем опасности избегающего опасность транспортного средства, блок 160 вычисления маршрута определяет, что невозможно избежать опасность создания помехи встречным поворачивающим налево транспортным средством V6 и вновь вычисляет план движения, который может исключить опасность, обусловленную помехой. Например, блок 160 вычисления маршрута вычисляет маршрут, в котором задействуемое транспортное средство V1 один раз останавливается и ожидает на перекрестке C (маршрут R2b) и возобновляет поворот направо (маршрут R2c) после того, как встречное поворачивающее налево транспортное средство V6 въезжает на правую полосу движения дороги D2. В качестве альтернативы этому, при условии, что задействуемое транспортное средство V1 поворачивает направо на перекрестке С, когда имеется множество полос движения для поворота направо, которые являются производными полосами на перекрестке С, и другое транспортное средство V6 поворачивает налево и обращено к задействуемому транспортному средству, например, блок 160 вычисления маршрута может выбрать полосу движения с наименьшим уровнем опасности среди полос движения для поворота направо на перекрестке C, которые являются производными полосами движения, для вычисления плана движения до того, как задействуемое транспортное средство V1 въедет на перекресток C.
[0104]
Кроме того, когда задействуемое транспортное средство V1 поворачивает налево, как в случае поворота направо, блок 160 вычисления маршрута вновь вычисляет план движения, который может исключить опасность из-за помехи. Например, в сцене движения на Фиг.13В предполагается, что задействуемое транспортное средство V1 и встречное поворачивающее налево транспортное средство V6 меняются местами, задействуемое транспортное средство V1 поворачивает налево из положения V6 и въезжает на правую полосу движения дороги D2, а встречное поворачивающее направо транспортное средство присутствует в положении V1. В этом случае, когда делается определение, что задействуемое транспортное средство V1 въехало на перекресток С и не может избежать опасность создания помехи встречным поворачивающим направо транспортным средством, блок 160 вычисления маршрута вычисляет план движения, например, для движения со скоростью транспортного средства, которая ниже установленной скорости транспортного средства, которую устанавливает водитель, на предварительно определенное значение или более. Здесь предварительно определенное значение может быть установлено равным подходящему значению, которое может исключить опасность, обусловленную предсказанным маневром движения встречным поворачивающим направо транспортным средством, которое избегает опасность. В качестве альтернативы этому блок 160 вычисления маршрута может установить крайнюю левую полосу движения среди полос движения после поворота налево (т.е. левую полосу движения дороги D2) в качестве полосы движения, по которой задействуемому транспортному средству V1 двигаться после поворота налево, и вновь вычислить план движения. Посредством этого маршрута движения можно избежать опасность, обусловленную уровнем опасности избегающего опасность транспортного средства. Однако, чтобы продолжить движение, необходимо перестроиться с левой полосы движения на правую полосу позади другого транспортного средства V5.
[0105]
Далее будет описано содержание обработки, выполняемой блоком 160 вычисления маршрута. На Фиг.4 представлена блок-схема последовательности операций, иллюстрирующая процедуру обработки информации в блоке 1603 хранения информации об окружающих объектах блока 160 вычисления маршрута, а Фиг.5A и 5B представляют собой блок-схемы последовательности операций, иллюстрирующие процедуру обработки информации в блоке 1605 генерирования карты предсказанных опасностей, блоке 1610 изучения карты присутствующих опасностей, блоке 1611 генерирования карты присутствующих опасностей, блоке 1612 объединения карт опасностей и блоке 1613 определения действий блока 160 вычисления маршрута.
[0106]
Сначала, когда каждое транспортное средство движется по произвольной дороге, процесс, показанный на Фиг.4, и данные, накопленные при этом, используются для последующего содействия движению для каждого транспортного средства. На этапе S11 на Фиг.4, выполняется определение того, начало ли или нет движение каждое транспортное средство, и когда движение началось, процесс переходит к этапу S12, на котором обнаруживаются окружающие объекты посредством датчиков 1, таких как камера и датчик дальности. Когда транспортное средство не начало движение, этап S11 повторяется.
[0107]
Когда объекты вокруг задействуемого транспортного средства обнаружены на этапе S12, процесс переходит к этапу S13, на котором объекты, обнаруженные посредством устройства 5 распознавания окружающей обстановки и устройства 6 распознавания объектов, классифицируются, и устройство 4 обнаружения информации о задействуемом транспортном средстве используется для получения позиционной информации о положениях, в которых обнаружены объекты. Затем классификация, относящаяся к уровню опасности обнаруженных объектов, связывается с обнаруженными положениями и сохраняется в блоке 1604 хранения. На этапе S14 выполняется определение того, было ли или нет завершено движение задействуемого транспортного средства, и, когда движение задействуемого транспортного средства не завершено, процесс возвращается на этап S12, на котором обнаружение объектов и накопление данных повторяется до тех пор, пока движение не будет завершено. Большой объем данных, в которых классифицированные объекты и позиционная информация связаны друг с другом, накапливается в блоке 1604 хранения, и, таким образом, становится возможным получать экспериментальные данные об уровне опасности в произвольном положении.
[0108]
Затем при начале содействия движению задействуемого транспортного средства исполняются процессы, проиллюстрированные на Фиг.5А и 5В. Предполагается, что содействие движению согласно настоящему варианту осуществления представляет собой содействие движению, при котором водитель вводит пункт назначения, и автономное управление движением выполняется с использованием маршрута R движения из текущего положения P1 в пункт Px назначения. Пункты назначения включают в себя, помимо окончательного пункта назначения, промежуточную точку и перекресток, с которым будет встреча далее, например, перекресток, на котором запланирован поворот налево. В этом случае сначала на этапе S21 на Фиг.5A выполняется определение того, было ли или нет начато содействие движению задействуемого транспортного средства, и когда содействие движению задействуемого транспортного средства начато, процесс переходит к этапу S22. Когда содействие движению задействуемого транспортного средства не начато, этап S21 повторяется. На этапе S22 водителю предлагается ввести пункт назначения, текущее положение P1 задействуемого транспортного средства V1 получается устройством 4 обнаружения информации о задействуемом транспортном средстве, и получается пункт Px назначения, введенный водителем.
[0109]
На этапе S23 маршрут R движения вычисляется на основе текущего положения P1 задействуемого транспортного средства V1 и пункта Px назначения, которые получены на этапе S22. На последующем этапе S24 уровень опасности для каждого положения движения (т.е. для каждого дорожного участка и для каждой полосы движения) вдоль маршрута R движения, вычисленного на этапе S23, получается из блока 1604 хранения. На последующем этапе S25 вероятность столкновения с объектом для каждого положения движения (т.е. для каждого дорожного участка и для каждой полосы движения) вдоль маршрута R движения, вычисленного на этапе S23, получается из блока 1604 хранения. Затем, на последующем этапе S26, первичный оценочный уровень опасности вычисляется посредством умножения уровня опасности каждого обнаруженного объекта на вероятность столкновения. Соответствующие уровни опасности обнаруженных объектов и вероятности столкновения получаются на этапах S24 и S25. После вычисления первичного оценочного уровня опасности на этапе S26 процесс переходит к этапу S27 на Фиг.5B, на котором вторичный оценочный уровень опасности вычисляется с использованием уровня опасности и местоположения столкновения, которые используются для вычисления первичного оценочного уровня опасности. После начала содействия движению задействуемого транспортного средства V1, предпочтительно, процессы этапов S22-S27 выполняются перед началом движения, и маршрут R движения устанавливается посредством выбора участков дороги и полос движения, в которых первичный и вторичный оценочные уровни опасности являются наименьшими.
[0110]
Когда задействуемое транспортное средство V1 начинает движение, на этапе S28 окружающий объект обнаруживается в режиме реального времени, и когда объект обнаруживается, процесс переходит к этапу S29, на котором блок 1611 генерирования карты присутствующих опасностей вычисляет присутствующий уровень опасности для обнаруженного объекта. Затем, после вычисления присутствующего уровня опасности, на этапе S30 блок 1614 обнаружения избегающего опасность транспортного средства может определить, существует ли или нет другое транспортное средство, которое избегает опасность, обусловленную первичным оценочным уровнем опасности. Когда определено, что другое транспортное средство, которое избегает опасность, обусловленную первичным оценочным уровнем опасности, отсутствует, процесс переходит к этапу S31. С другой стороны, когда определено, что присутствует другое транспортное средство, которое избегает опасность, обусловленную первичным оценочным уровнем опасности, процесс переходит к этапу S34.
[0111]
Когда процесс переходит к этапу S31, первичный и вторичный оценочные уровни опасности сравниваются с присутствующим уровнем опасности, и движению транспортного средства оказывается содействие на основе большего уровня опасности. То есть, когда первичный и вторичный оценочные уровни опасности больше, процесс переходит к этапу S32, на котором выполняется содействие движению, отдающее приоритет предсказанному уровню опасности. С другой стороны, когда присутствующий уровень опасности больше, процесс переходит к этапу S33, на котором выполняется содействие движению, отдающее приоритет присутствующему уровню опасности.
[0112]
С другой стороны, когда процесс переходит к этапу S34, блок 1615 генерирования уровня опасности избегающего опасность транспортного средства вычисляет уровень опасности избегающего опасность транспортного средства, и процесс переходит к этапу S35. На этапе S35 выполняется определение того, можно ли избежать другое транспортное средство, обнаруженное на этапе S30, которое избегает опасность. Когда определено, что опасность можно избежать, процесс переходит к этапу S36, на котором содействие движению выполняется с использованием уровня опасности избегающего опасность транспортного средства. С другой стороны, когда делается определение, что опасность невозможно избежать, процесс переходит к этапу S37, на котором блок 160 вычисления маршрута вновь вычисляет план движения, который исключает опасность, обусловленную уровнем опасности избегающего опасность транспортного средства. Этап S30 и этапы S34-S37 могут быть опущены по мере необходимости.
[0113]
Когда на этапе S28 в режиме реального времени не обнаруживается окружающий объект, процесс переходит к этапу S32 без выполнения этапов S29, S30 и S31, чтобы определить приоритет содействия движению по первичному и вторичному оценочным уровням опасности.
[0114]
Как описано выше, согласно способу содействия движению для транспортного средства и устройству содействия согласно настоящему варианту осуществления, когда транспортное средство обнаруживает объект, получается уровень опасности объекта, уровень опасности объекта связывается с местоположением столкновения, в котором произойдет столкновение с объектом, уровень опасности в местоположении столкновения накапливается, и накопленный уровень опасности в местоположении столкновения используется для получения первичного оценочного уровня опасности объекта, с которым предсказывается столкновение в местоположении столкновения. Первичный оценочный уровень опасности ниже уровня опасности, полученного при обнаружении объекта. Затем получают вторичный оценочный уровень опасности, меньший, чем первичный оценочный уровень опасности с использованием предсказанного маневра движения другого транспортного средства, которое избегает опасность, обусловленную первичным оценочным уровнем опасности, и при повторном движении в местоположении столкновения движение транспортного средства автономно управляется с использованием вторичного оценочного уровня опасности. Это позволяет оценить уровень опасности до достижения местоположения столкновения, в котором произойдет столкновение с обнаруженным объектом, и, следовательно, можно выполнить, даже до обнаружения объекта, содействие движению, способное избежать любую опасность, которая может возникнуть. Когда установлен первичный оценочный уровень опасности, движение задействуемого транспортного средства V1 может быть затруднено действием другого транспортного средства, которое избегает опасность, обусловленную первичным оценочным уровнем опасности. Однако, к счастью, когда устанавливается первичный оценочный уровень опасности, устанавливается вторичный оценочный уровень опасности, который может возникнуть из-за первичного оценочного уровня опасности, тем самым позволяя заранее составить план движения с учетом первичного оценочного уровня опасности и вторичного оценочного уровня опасности, который возникает из-за первичного оценочного уровня опасности, и можно реализовать движение, в котором исключаются ненужные остановки, замедление и поведение.
[0115]
Кроме того, согласно способу содействия движению для транспортного средства и устройству содействия согласно настоящему варианту осуществления, вторичный оценочный уровень опасности размещен позади местоположения столкновения в смежной полосе движения по отношению к полосе движения, соответствующей местоположению столкновения с первичным оценочным уровнем опасности. Благодаря такому размещению можно точно определить опасность, обусловленную другим транспортным средством, которое может создать помеху на полосе движения, по которой движется задействуемое транспортное средство V1, для избегания опасности впереди в направлении движения задействуемого транспортного средства V1, и ненужные остановки, замедления и т. д. могут быть исключены.
[0116]
Более того, в соответствии со способом содействия движению для транспортного средства и устройством содействия согласно настоящему варианту осуществления величина вторичного оценочного уровня опасности увеличивается пропорционально величине первичного оценочного уровня опасности. Это позволяет установить величину вторичного оценочного уровня опасности в соответствии с опасностью, обусловленной первичным оценочным уровнем опасности.
[0117]
Кроме того, согласно способу содействия движению для транспортного средства и устройству содействия согласно настоящему варианту осуществления, третичный или более высокий предсказанный уровень опасности получают во второй смежной полосе движения, которая является смежной по отношению к смежной полосе движения, с использованием вторичного оценочного уровня опасности, и при повторном движении в местоположении столкновения движение транспортного средства автономно управляется с использованием третичного или более высокого предсказанного уровня опасности. Посредством этой операции устанавливается третичный или более высокий предсказанный уровень опасности, который может возникнуть из-за вторичного оценочного уровня опасности, и может быть предварительно создан план движения с учетом третичного или более высокого предсказанного уровня опасности; следовательно, можно реализовать движение, при котором ненужные остановки, замедление и поведение исключаются.
[0118]
Кроме того, согласно способу содействия движению для транспортного средства и устройству содействия согласно настоящему варианту осуществления, при условии, что задействуемое транспортное средство V1 осуществляет поворот налево, когда перекресток С расположен позади первичного оценочного уровня опасности, размещенного в полосе движения после поворота налево относительно направления движения задействуемого транспортного средства V1, вторичный оценочный уровень опасности размещен в полосе движения, отличной от полосы движения, в которой существует первичный оценочный уровень опасности, среди полос движения после поворота налево или в течение поворота налево. Посредством такого размещения можно точно определить опасность, обусловленную поворачивающим направо транспортным средством, которое избегает первичный оценочный уровень опасности, размещенный в полосе движения после поворота налево, и можно исключить ненужную остановку, замедление и т. д.
[0119]
Кроме того, согласно способу содействия движению для транспортного средства и устройству содействия согласно настоящему варианту осуществления, при условии, что задействуемое транспортное средство V1 осуществляет поворот направо, когда перекресток С расположен позади первичного оценочного уровня опасности, размещенного в полосе движения после поворота направо относительно направления движения задействуемого транспортного средства V1, вторичный оценочный уровень опасности размещен в полосе движения, отличной от полосы движения, в которой существует первичный оценочный уровень опасности, среди полос движения после поворота направо или в течение поворота направо. Посредством такого размещения можно точно определить опасность, обусловленную поворачивающим налево транспортным средством, которое избегает первичный оценочный уровень опасности, размещенный в полосе движения после поворота направо, и можно исключить ненужную остановку, замедление и т. д.
[0120]
Кроме того, согласно способу содействия движению для транспортного средства и устройству содействия согласно настоящему варианту осуществления, когда имеются две или более полос движения, отличных от полосы движения, в которой существует первичный оценочный уровень опасности, среди полос движения после поворота налево или поворота направо, вторичный оценочный уровень опасности размещен в полосе движения, ближайшей к первичному оценочному уровню опасности среди полос движения, отличных от полосы движения, в которой существует первичный оценочный уровень опасности. Благодаря такому размещению можно точно оценить опасность, обусловленную поворачивающим направо транспортным средством, которое избегает первичный оценочный уровень опасности, размещенный в полосе движения после поворота налево, и опасность, обусловленную поворачивающим налево транспортным средством, которое избегает первичный оценочный уровень опасности, размещенный в полосе движения после поворота направо, и можно исключить ненужную остановку, замедление и т.д.
[0121]
Кроме того, согласно способу содействия движению для транспортного средства и устройству содействия согласно настоящему варианту осуществления, опасность увеличивается в полосах движения после поворота налево или поворота направо у полосы движения со вторичным оценочным уровнем опасности вблизи первичного оценочного уровня опасности среди вторичных оценочных уровней опасности, размещенных в двух или более полосах движения относительно направления движения задействуемого транспортного средства. Это позволяет более точно отразить первичный оценочный уровень опасности, размещенный в полосе движения после поворота налево или направо, во вторичном оценочном уровне опасности.
[0122]
Кроме того, согласно способу содействия движению для транспортного средства и устройству содействия настоящего варианта осуществления, когда движение задействуемого транспортного средства V1 управляется автономно, обнаруживается объект вокруг задействуемого транспортного средства V1. При обнаружении объекта получают присутствующий уровень опасности объекта, и наивысший уровень опасности среди присутствующего уровня опасности, первичного оценочного уровня опасности и вторичного оценочного уровня опасности вычисляется как объединенная опасность. Движение транспортного средства автономно управляется посредством объединенной опасности. Это позволяет двигаться, выбирая самый высокий уровень среди вычисленных уровней опасности, и можно выполнять содействие движению, способное избежать любую опасность, которая может возникнуть. Кроме того, план движения может быть создан предварительно с учетом присутствующего уровня опасности, первичного оценочного уровня опасности и вторичного оценочного уровня опасности, и можно реализовать движение, в котором исключаются ненужные остановки, торможение и поведение.
[0123]
Кроме того, согласно способу содействия движению для транспортного средства и устройства содействия согласно настоящему варианту осуществления, объединенная опасность, вычисленная из присутствующего уровня опасности, первичного оценочного уровня опасности и вторичного оценочного уровня опасности, используется для установки полосы движения, в которой транспортному средству двигаться. Это позволяет выбирать полосу движения на основе наивысшего уровня среди вычисленных уровней опасности, и можно выполнять содействие движению, способное избежать любую опасность, которая может возникнуть. Кроме того, можно реализовать движение, при котором ненужные остановки, замедление и поведение исключаются.
[0124]
Кроме того, в соответствии со способом содействия движению для транспортного средства и устройством содействия согласно настоящему варианту осуществления, когда уровень опасности вычисляется для одной и той же опасности, присутствующий уровень опасности является самым большим, первичный оценочный уровень опасности является вторым по величине, и вторичный оценочный уровень опасности является наименьшим. Это позволяет выполнять содействие движению на основе присутствующего уровня опасности, обусловленного объектом, обнаруженным в течение движения, и фактическую опасность можно избежать. Таким образом можно исключить ненужную остановку, замедление и поведение.
[0125]
Более того, согласно способу содействия движению для транспортного средства и устройству содействия согласно настоящему варианту осуществления, движение задействуемого транспортного средства V1 управляется автономно, чтобы перестроиться в направлении избегания вторичного оценочного уровня опасности. Это может избежать любой опасности, которая может возникнуть, и можно исключить ненужные остановки, замедления и поведение.
[0126]
Кроме того, согласно способу содействия движению для транспортного средства и устройству содействия согласно настоящему варианту осуществления выполняется определение того, существует ли или нет другое транспортное средство, которое избегает опасность, обусловленную первичным оценочным уровнем опасности. Когда определено, что существует другое транспортное средство, уровень опасности избегающего опасность транспортного средства получается с использованием предсказанного маневра движения другого транспортного средства, и движение транспортного средства автономно управляется с использованием уровня опасности избегающего опасность транспортного средства. Посредством этой операции вторичный оценочный уровень опасности и уровень опасности избегающего опасность транспортного средства, превышающий вторичный оценочный уровень опасности, могут быть использованы, таким образом, для дополнительного избегания любой опасности, которая может возникнуть, по сравнению со случаем использования только вторичного оценочного уровня опасности.
[0127]
Кроме того, согласно способу содействия движению для транспортного средства и устройству содействия согласно настоящему варианту осуществления, уровень опасности избегающего опасность транспортного средства размещен позади местоположения столкновения в смежной полосе движения по отношению к полосе, соответствующей местоположению столкновения с первичным оценочным уровнем опасности. Благодаря такому размещению можно точно определить опасность, обусловленную другим транспортным средством, которое создает помеху на полосе движения, по которой движется задействуемое транспортное средство V1, для избегания опасности впереди в направлении движения задействуемого транспортного средства V1, и ненужная остановка, замедление и т.д. могут быть исключены.
[0128]
Кроме того, согласно способу содействия движению для транспортного средства и устройству содействия согласно настоящему варианту осуществления, уровень опасности избегающего опасность транспортного средства размещен в том же положении, что и вторичный оценочный уровень опасности, полученный с использованием предсказанного маневра движения другого транспортного средства, которое избегает опасность, обусловленную первичным оценочным уровнем опасности. Благодаря такому размещению можно точно определить опасность, обусловленную другим транспортным средством, которое создает помеху на полосе движения, по которой движется задействуемое транспортное средство V1, для избегания опасности впереди в направлении движения задействуемого транспортного средства V1, и ненужная остановка, замедление и т. д. могут быть исключены.
[0129]
Кроме того, согласно способу содействия движению для транспортного средства и устройству содействия согласно настоящему варианту осуществления, уровень опасности избегающего опасность транспортного средства получается посредством взвешивания вторичного оценочного уровня опасности, полученного с использованием предсказанного маневра движения другого транспортного средства, которое избегает опасность, обусловленную первичным оценочным уровнем опасности. Это позволяет установить величину уровня опасности избегающего опасность транспортного средства в соответствии с опасностью, обусловленной вторичным оценочным уровнем опасности.
[0130]
Кроме того, согласно способу содействия движению для транспортного средства и устройству содействия настоящего варианта осуществления, когда движение задействуемого транспортного средства V1 управляется автономно, обнаруживается объект вокруг задействуемого транспортного средства. Когда объект обнаружен, получается присутствующий уровень опасности объекта, и наивысший уровень опасности среди присутствующего уровня опасности, первичного оценочного уровня опасности, вторичного оценочного уровня опасности и уровня опасности избегающего опасность транспортного средства вычисляется как объединенная опасность. Движение транспортного средства автономно управляется посредством объединенной опасности. Это позволяет двигаться, выбирая самый высокий уровень среди вычисленных уровней опасности, и можно выполнять содействие движению, способное избежать любую опасность, которая может возникнуть. Кроме того, план движения может быть создан заранее с учетом присутствующего уровня опасности, первичного оценочного уровня опасности, вторичного оценочного уровня опасности и уровня опасности избегающего опасность транспортного средства, и можно реализовать движение, в котором ненужные остановки, торможения, и поведение исключаются.
[0131]
Кроме того, в соответствии со способом содействия движению для транспортного средства и устройством содействия согласно настоящему варианту осуществления используется объединенная опасность, вычисленная из присутствующего уровня опасности, первичного оценочного уровня опасности, вторичного оценочного уровня опасности и уровня опасности избегающего опасность транспортного средства, для установки полосы движения, по которой двигаться задействуемому транспортному средству. Это позволяет выбирать полосу движения на основе наивысшего уровня среди вычисленных уровней опасности, и можно выполнять содействие движению, способное избежать любую опасность, которая может возникнуть. Кроме того, можно реализовать движение, при котором ненужные остановки, замедление и поведение исключаются.
[0132]
Кроме того, согласно способу содействия движению для транспортного средства и устройству содействия согласно настоящему варианту осуществления выполняется определение относительно того, можно ли или нет избежать опасность, обусловленную уровнем опасности избегающего опасность транспортного средства. Когда определено, что можно избежать опасность, обусловленную уровнем опасности избегающего опасность транспортного средства, выполняется смена полос движения для избегания опасности, обусловленной уровнем опасности избегающего опасность транспортного средства. Это помогает избежать любую опасность, которая может возникнуть, и можно исключить ненужные остановки, замедления и поведение.
[0133]
Кроме того, согласно способу содействия движению для транспортного средства и устройству содействия согласно настоящему варианту осуществления, при условии, что задействуемое транспортное средство V1 поворачивает направо на перекрестке С, когда имеется другое транспортное средство V6, которое обращено к задействуемому транспортному средству V1 и поворачивает налево, задействуемое транспортное средство V1 не въезжает на перекресток. Это может предотвратить опасность создания помехи встречным поворачивающим налево транспортным средством V6 на перекрестке C, и можно исключить ненужную остановку, замедление и поведение.
[0134]
Кроме того, согласно способу содействия движению для транспортного средства и устройству содействия согласно настоящему варианту осуществления, при условии, что задействуемое транспортное средство V1 поворачивает направо на перекрестке С, когда на перекрестке С имеется две или более полос движения для поворота направо и другое транспортное средство V6, которое обращено к задействуемому транспортному средству V1 и поворачивает налево, полоса движения для поворота направо, в которой уровень опасности является наименьшим, выбирается из полос движения для поворота направо на перекрестке C. Это может исключить опасность создания помехи встречным поворачивающим налево транспортным средством V6 на перекрестке C, и ненужные остановки, замедление и поведение могут быть исключены.
[0135]
Кроме того, согласно способу содействия движению для транспортного средства и устройству содействия согласно настоящему варианту осуществления, при условии, что задействуемое транспортное средство V1 поворачивает налево на перекрестке С, когда имеется другое транспортное средство, которое обращено к задействуемому транспортному средству V1 и поворачивает направо, крайняя левая полоса движения среди полос движения после того, как задействуемое транспортное средство V1 поворачивает налево, устанавливается в качестве полосы движения, по которой двигаться задействуемому транспортному средству V1 после поворота налево. Это может исключить опасность, обусловленную встречным поворачивающим направо транспортным средством, и можно исключить ненужную остановку, замедление и поведение.
[0136]
Кроме того, согласно способу содействия движению для транспортного средства и устройству содействия согласно настоящему варианту осуществления выполняется определение относительно того, можно ли или нет избежать опасность, обусловленную уровнем опасности избегающего опасность транспортного средства. Когда делается определение, что опасность, обусловленную уровнем опасности избегающего опасность транспортного средства, невозможно избежать, и возникнет столкновение с опасностью, план движения, который исключает опасность, обусловленную уровнем опасности избегающего опасность транспортного средства, вновь вычисляется до столкновения с опасностью, обусловленной уровнем опасности избегающего опасность транспортного средства. Это позволяет предварительно создать план движения перед вторичным оценочным уровнем опасности при наличии другого транспортного средства, въезжающего во вторичный оценочный уровень опасности, и можно реализовать движение, при котором исключаются ненужные остановки, торможения и поведение при движении в положении, размещенном со вторичным оценочным уровнем опасности.
[0137]
Кроме того, согласно способу содействия движению для транспортного средства и устройству содействия согласно настоящему варианту осуществления вновь вычисленный план движения представляет собой план движения, в котором задействуемое транспортное средство V1 движется со скоростью транспортного средства, которая ниже установленной скорости транспортного средства, которую водитель устанавливает, на предварительно определенное значение или более. Это может исключить опасность, обусловленную уровнем опасности избегающего опасность транспортного средства, по сравнению со случаем движения с установленной скоростью транспортного средства.
[0138]
Кроме того, согласно способу содействия движению для транспортного средства и устройству содействия согласно настоящему варианту осуществления вновь вычисленный план движения является планом движения для движения с поддержанием относительной скорости транспортного средства между задействуемым транспортным средством V1 и впереди идущим транспортным средством для задействуемого транспортного средства V1 на предварительно установленной относительной скорости транспортного средства или менее. Это может исключить опасность, обусловленную уровнем опасности избегающего опасность транспортного средства, по сравнению со случаем движения без учета относительной скорости.
[0139]
Кроме того, согласно способу содействия движению для транспортного средства и устройству содействия согласно настоящему варианту осуществления вновь вычисленный план движения представляет собой план движения для движения с поддержанием расстояния между транспортными средствами между задействуемым транспортным средством V1 и впереди идущим транспортным средством Y для задействуемого транспортного средства V1 на предварительно определенном расстоянии между транспортными средствами или более. Это может исключить опасность, обусловленную уровнем опасности избегающего опасность транспортного средства, по сравнению со случаем движения без учета расстояния между транспортными средствами между впереди идущим транспортным средством Y и задействуемым транспортным средством V1.
[0140]
Кроме того, согласно способу содействия движению для транспортного средства и устройству содействия согласно настоящему варианту осуществления вновь вычисленный план движения представляет собой план движения для движения с поддержанием расстояния между транспортными средствами между задействуемым транспортным средством V1 и другим транспортным средством, которое избегает опасность, обусловленную первичным оценочным уровнем опасности, на предварительно определенном расстоянии между транспортными средствами или больше. Это может исключить опасность, обусловленную уровнем опасности избегающего опасность транспортного средства, по сравнению со случаем движения без учета расстояния между транспортными средствами между другим транспортным средством и задействуемым транспортным средством V1.
[0141]
Кроме того, согласно способу содействия движению для транспортного средства и устройству содействия согласно настоящему варианту осуществления, при условии, что задействуемое транспортное средство V1 поворачивает направо на перекрестке С, когда имеется другое транспортное средство V6, которое обращено к задействуемому транспортному средству V1 и поворачивает налево, вновь вычисленный план движения представляет собой план движения, в котором задействуемое транспортное средство V1 ожидает на перекрестке C. Это позволяет задействуемому транспортному средству V1 возобновить поворот направо после завершения поворота налево встречного поворачивающего налево транспортного средства V6, и опасность, обусловленная встречным поворачивающим налево транспортным средством V6, может быть исключена.
[0142]
Кроме того, согласно способу содействия движению для транспортного средства и устройству содействия согласно настоящему варианту осуществления, при условии, что задействуемое транспортное средство V1 поворачивает направо на перекрестке С, когда на перекрестке С имеется две или более полос движения для поворота направо и другое транспортное средство V6, которое обращено к задействуемому транспортному средству и поворачивает налево, вновь вычисленный план движения представляет собой план движения для выбора полосы движения для поворота направо, в которой уровень опасности является самым низким среди полос движения направо на перекрестке C. Это может исключить опасность, обусловленную встречным поворачивающим налево транспортным средством V6.
[0143]
Кроме того, согласно способу содействия движению для транспортного средства и устройству содействия настоящего варианта осуществления, при условии, что задействуемое транспортное средство V1 поворачивает налево на перекрестке, когда существует другое транспортное средство, которое обращено к задействуемому транспортному средству V1 и поворачивает направо, вновь вычисленный план движения представляет собой план движения, в котором задействуемое транспортное средство V1 движется со скоростью транспортного средства, которая ниже установленной скорости транспортного средства, которую устанавливает водитель, на предварительно определенное значение или более. Это может исключить опасность, обусловленную уровнем опасности избегающего опасность транспортного средства, по сравнению со случаем движения с установленной скоростью транспортного средства.
[Описание ссылочных обозначений]
[0144]
1000 Система содействия движению
100 Устройство содействия движению
10 Процессор
11 CPU
12 ROM
13 RAM
110 Устройство вывода
111 Устройство связи
120 Блок установки пункта назначения
130 Блок планирования маршрута
140 Блок планирования вождения
150 Блок вычисления проезжаемой области
160 Блок вычисления маршрута
1601 Блок получения траекторий окружающих объектов
1602 Блок классификации окружающих объектов
1603 Блок хранения информации об окружающих объектах
1604 Блок хранения
1605 Блок генерирования карты предсказанных опасностей
1606 Блок вычисления уровня опасности
1607 Блок вычисления вероятности столкновения
1608 Блок генерирования первичного оценочного уровня опасности
1609 Блок генерирования вторичного оценочного уровня опасности
1610 Блок изучения карты присутствующих опасностей
1611 Блок генерирования карты присутствующих опасностей
1612 Блок объединения карт опасностей
1613 Блок определения действий
1614 Блок обнаружения избегающего опасность транспортного средства
1615 Блок генерирования уровня опасности избегающего опасность транспортного средства
170 Блок управления действиями при вождении
200 Контроллер транспортного средства
210 Приводной механизм
211 Устройство связи
1 Датчики
2 Навигационное устройство
3 Картографическая информация
4 Устройство обнаружения информации о задействуемом транспортном средстве
5 Устройство распознавания окружающей обстановки
6 Устройство распознавания объектов
C Перекресток
D1 Дорога
D11 Левая полоса движения
D12 Центральная полоса движения
D13 Правая полоса движения
D14 Полоса движения только для поворота направо
D2 Дорога
D21 Левая полоса движения
D21a Участок после проезда через разветвление на дорогу D3
D22 Правая полоса движения
D22a Участок рядом с точкой ответвления на дорогу D3
D3 Дорога
D31 Левая полоса движения
P1 Текущее положение задействуемого автомобиля
Px Пункт назначения задействуемого транспортного средства
R, R1, R2, R3, R4 Маршрут движения
Ra, R1a, R2a, R3a, R4a Маршрут движения
R1b, R1c Маршрут движения
R2b, R2c Маршрут движения
R2d, R2e Маршрут движения
Rx, R1x, R2x, R3x, R4x Маршрут движения (сравнительный пример)
S1, S2, S3, S4 Светофор
V1, V1a Задействуемое транспортное средство
V2a, V2b, V2c, V2d Другие транспортные средства, ожидающие поворота налево
V3a, V3b Другие остановившиеся транспортные средства
V4a, V4b, V4c, V4d, V4e Другие транспортные средства, ожидающие поворота направо
V5 Другое остановленное транспортное средство
V6 Встречное поворачивающее налево поворот транспортное средство
X Не проезжаемая область
Y Впереди идущее транспортное средство

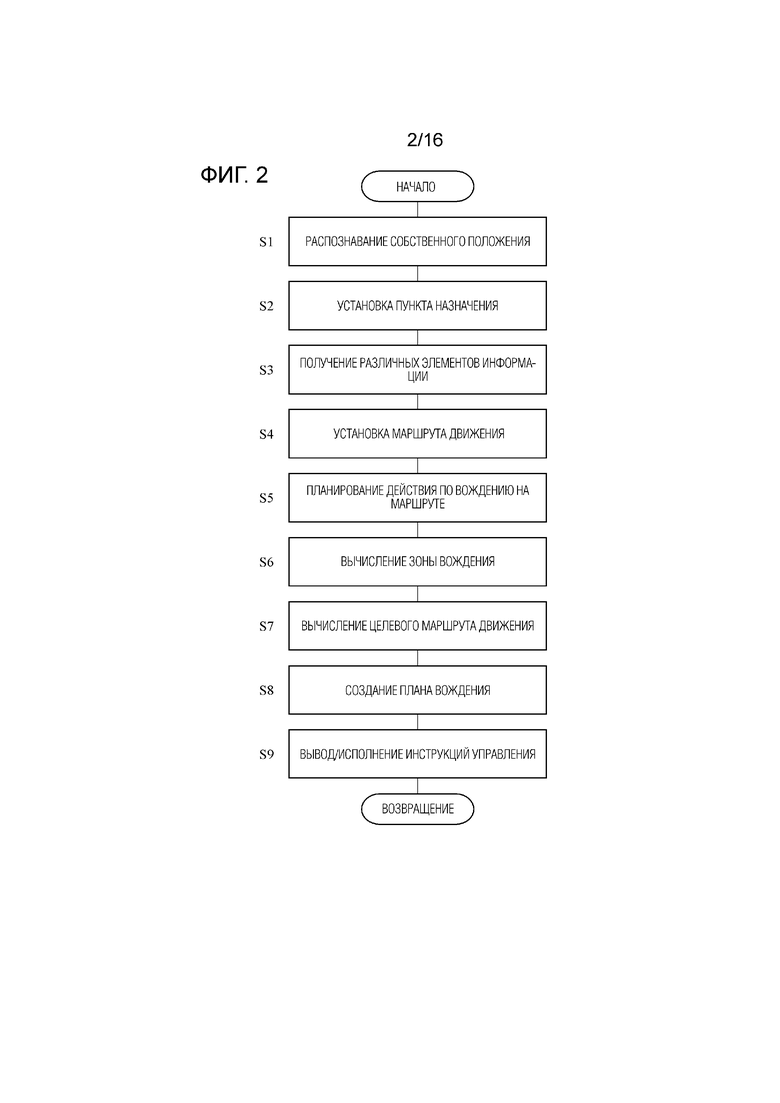
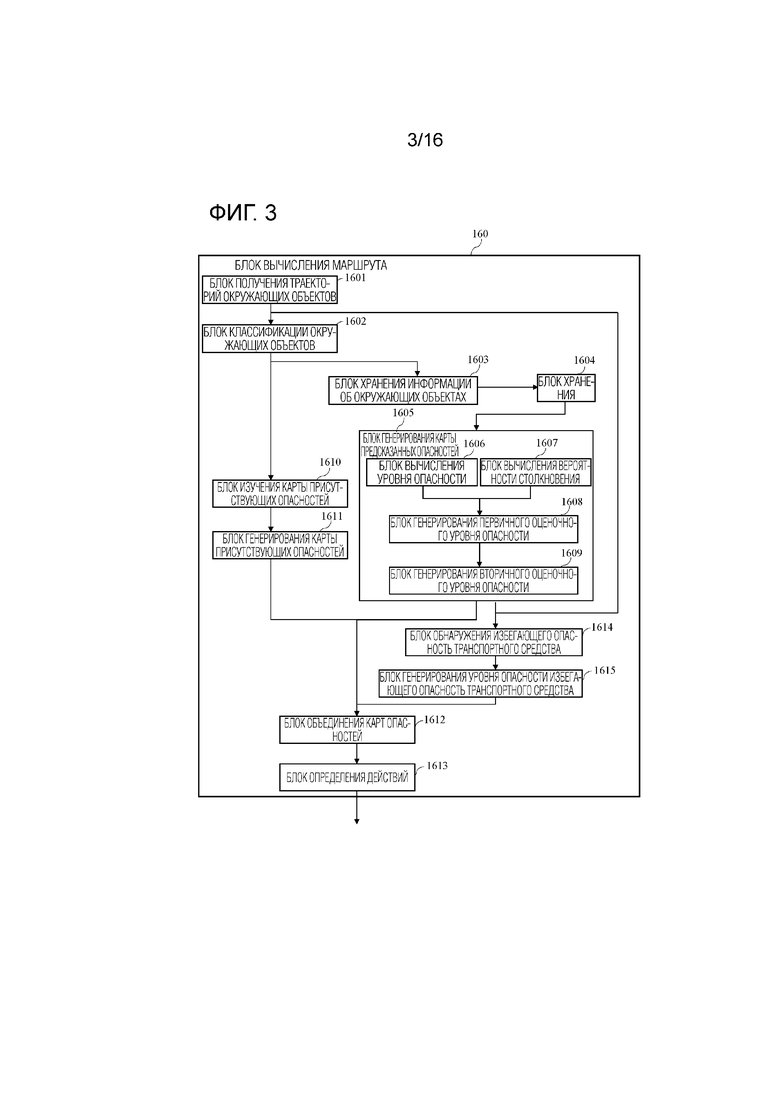
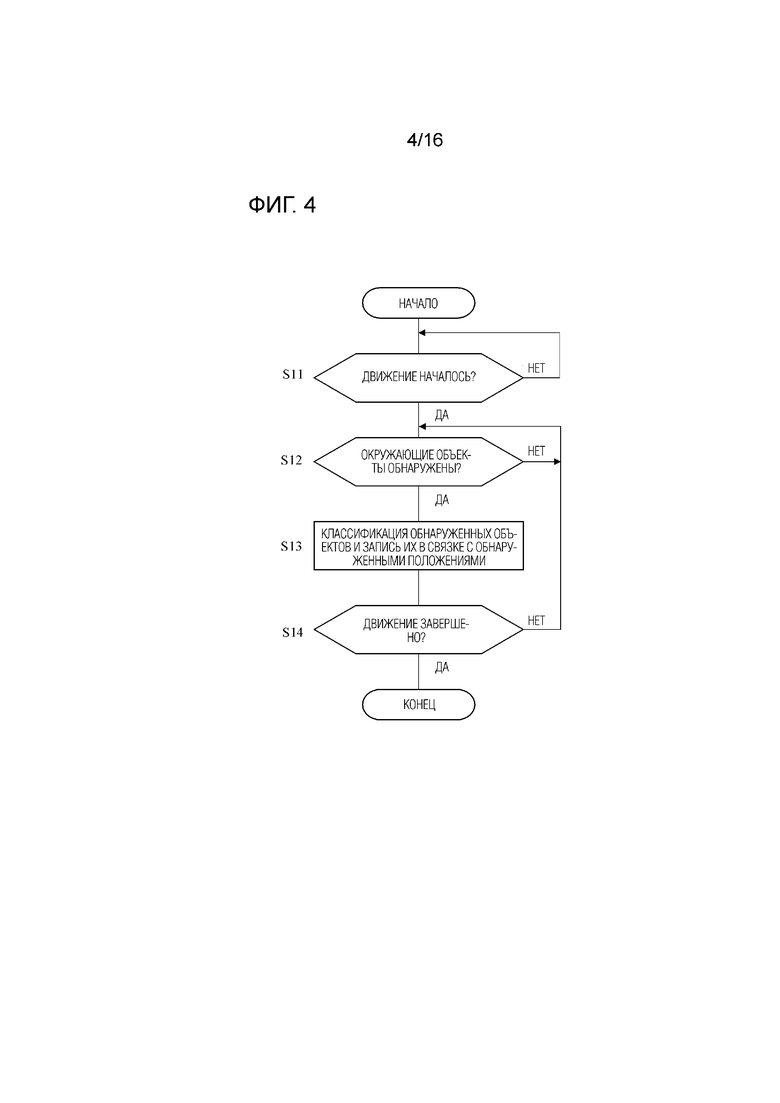
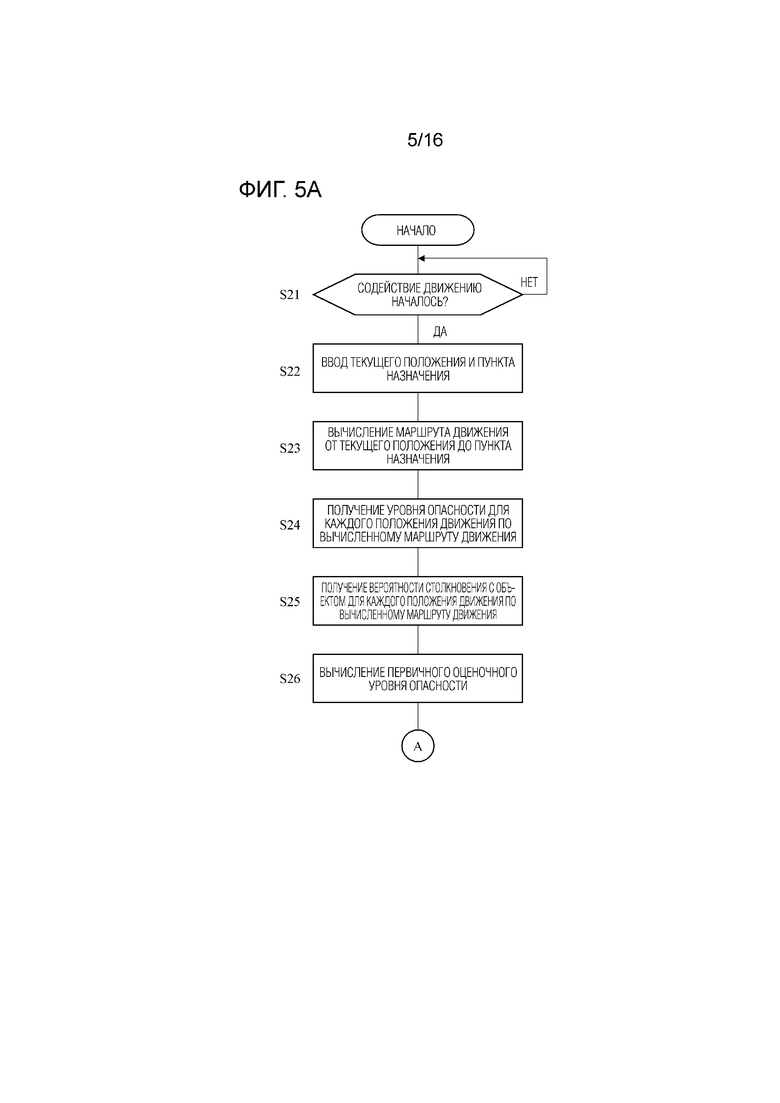
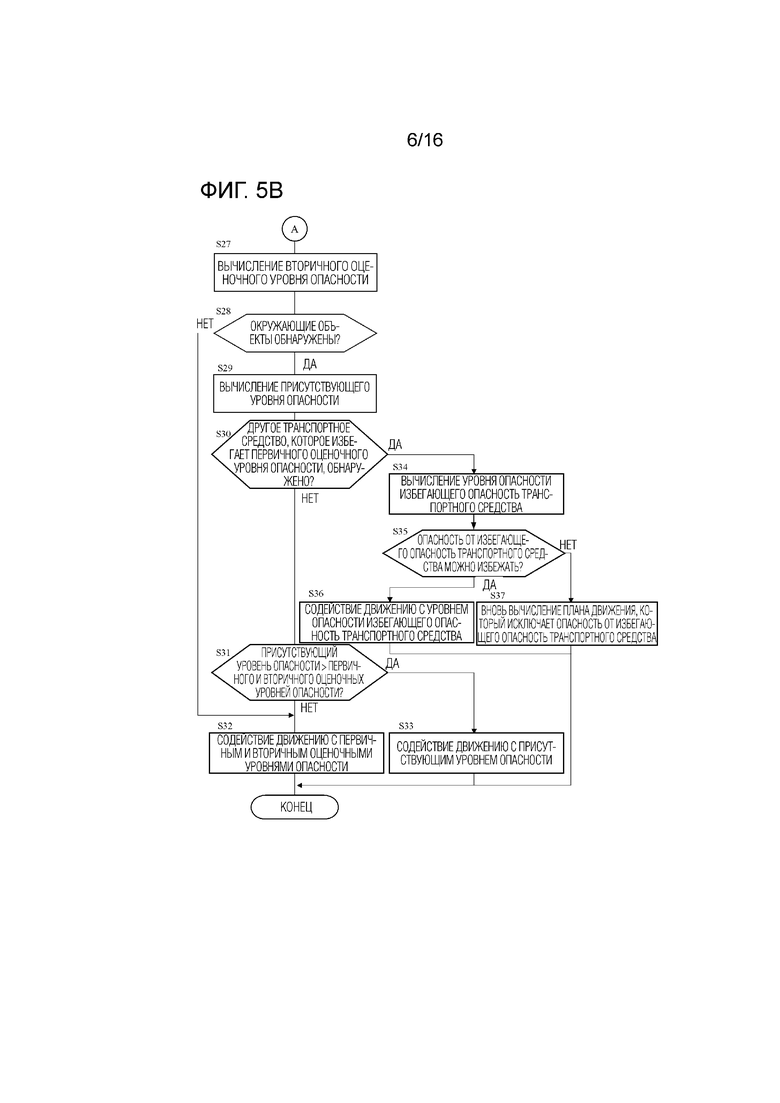
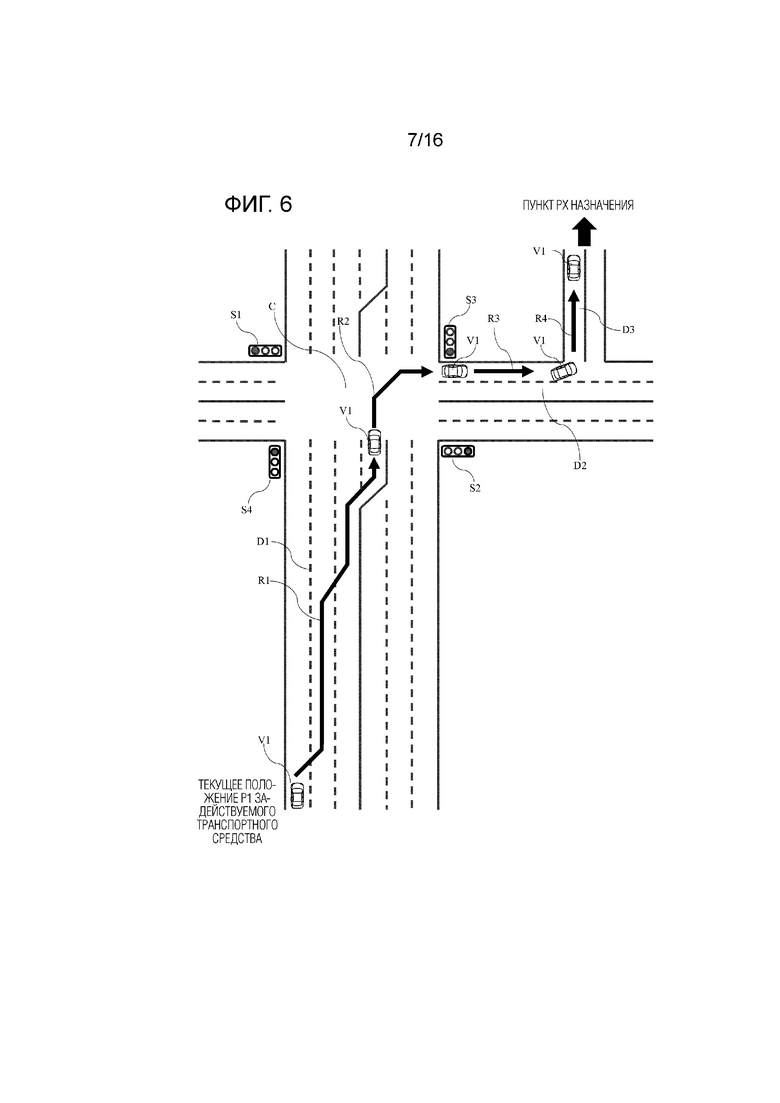
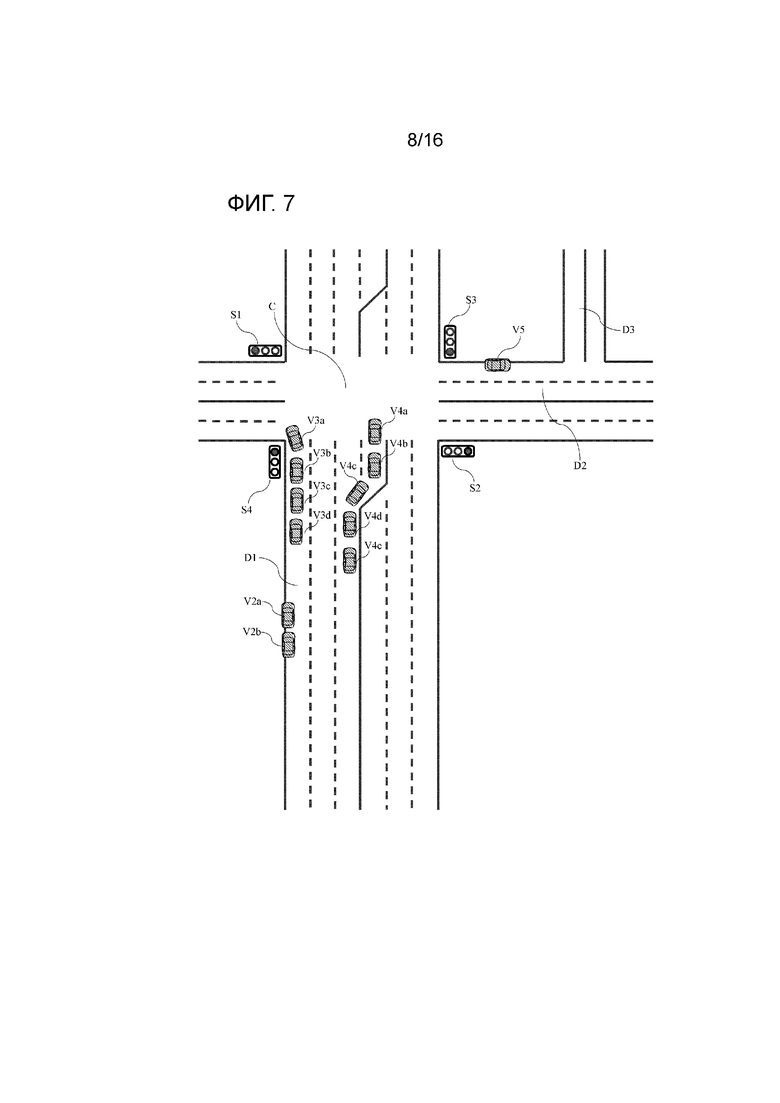
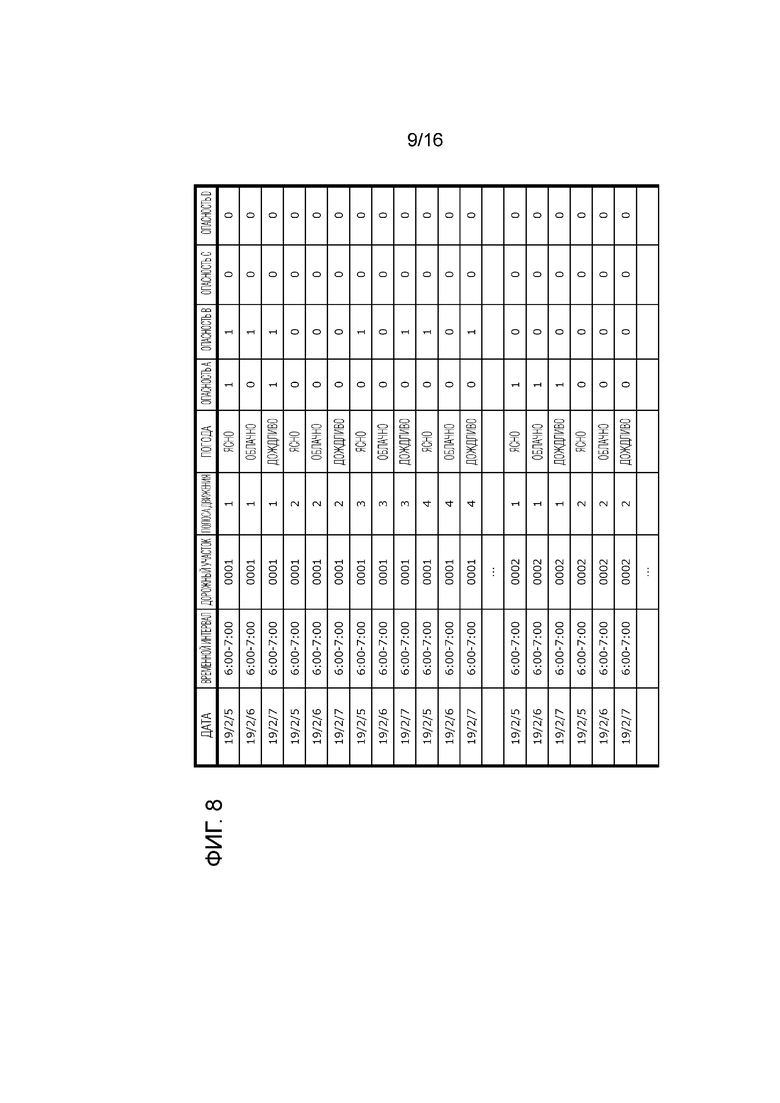
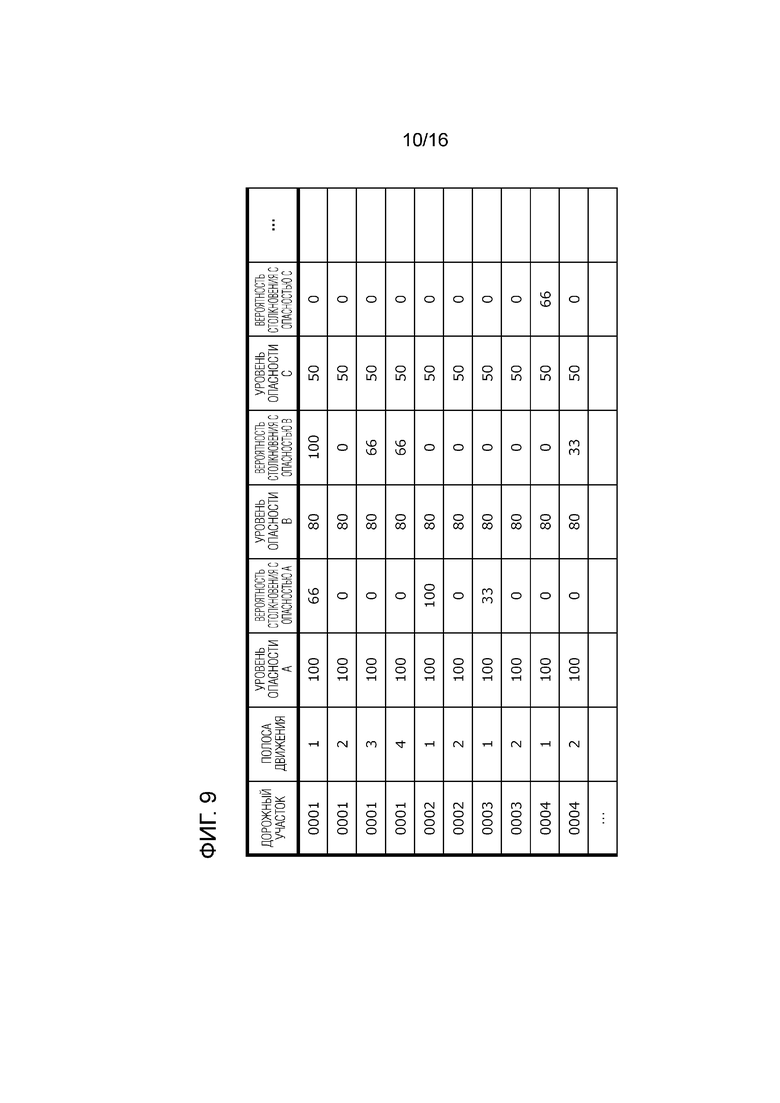
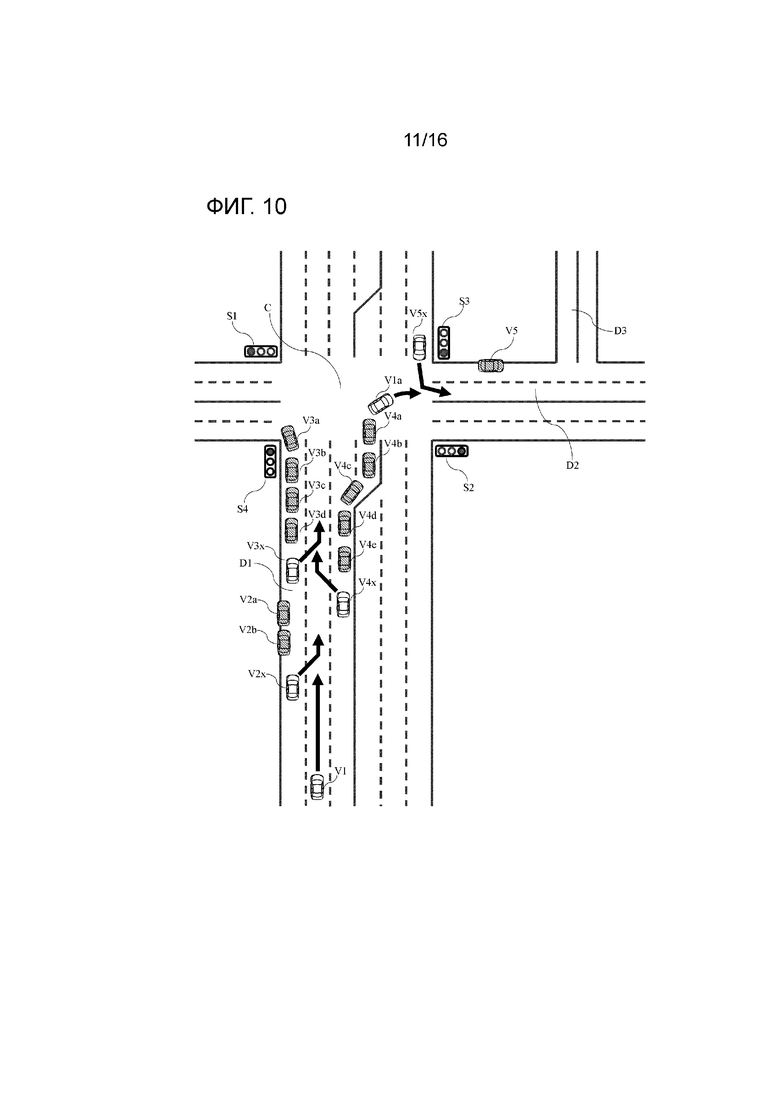
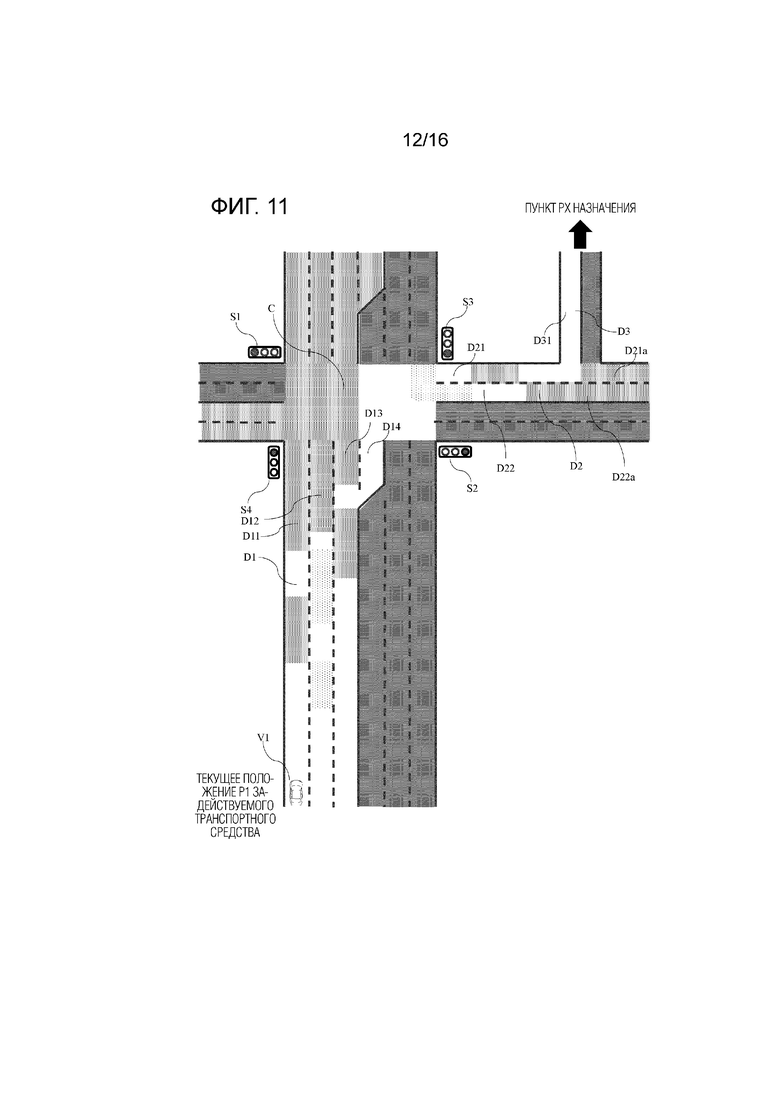
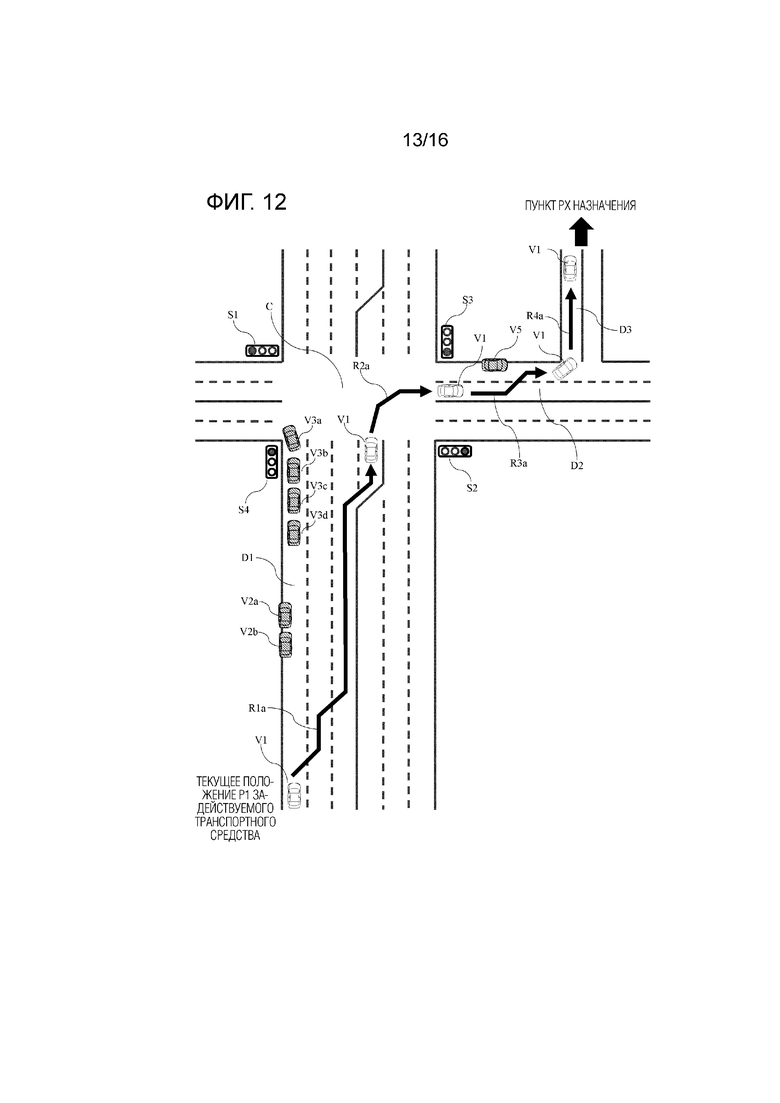
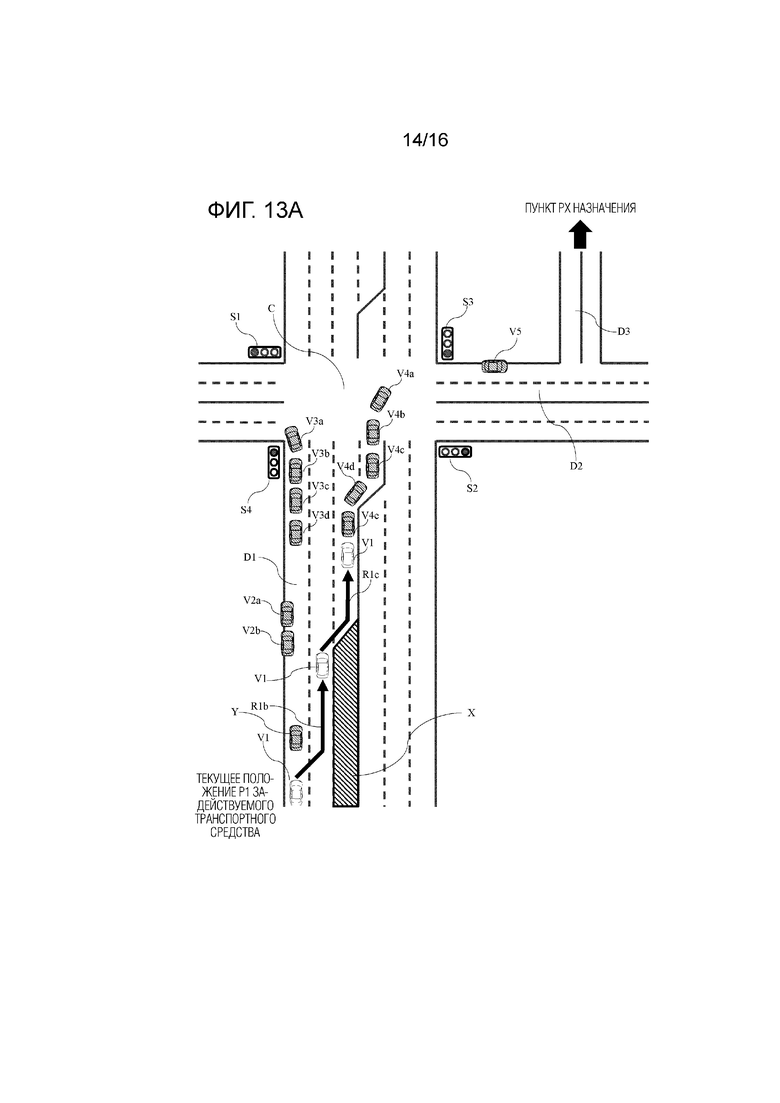
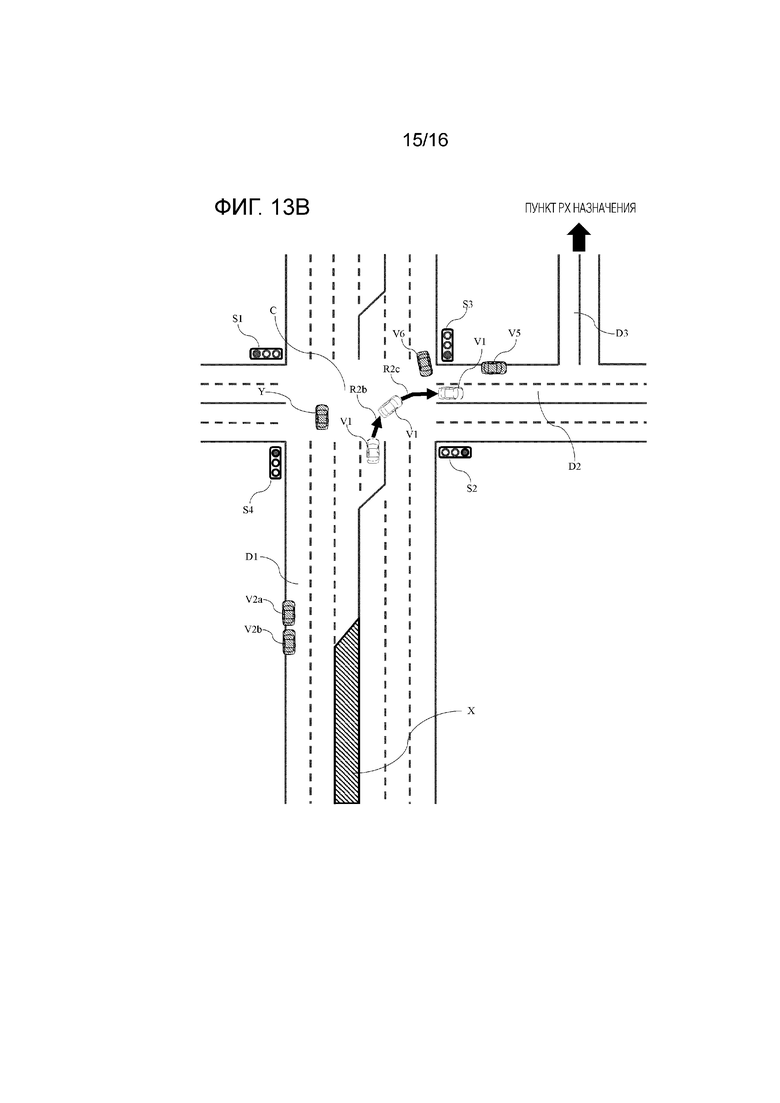
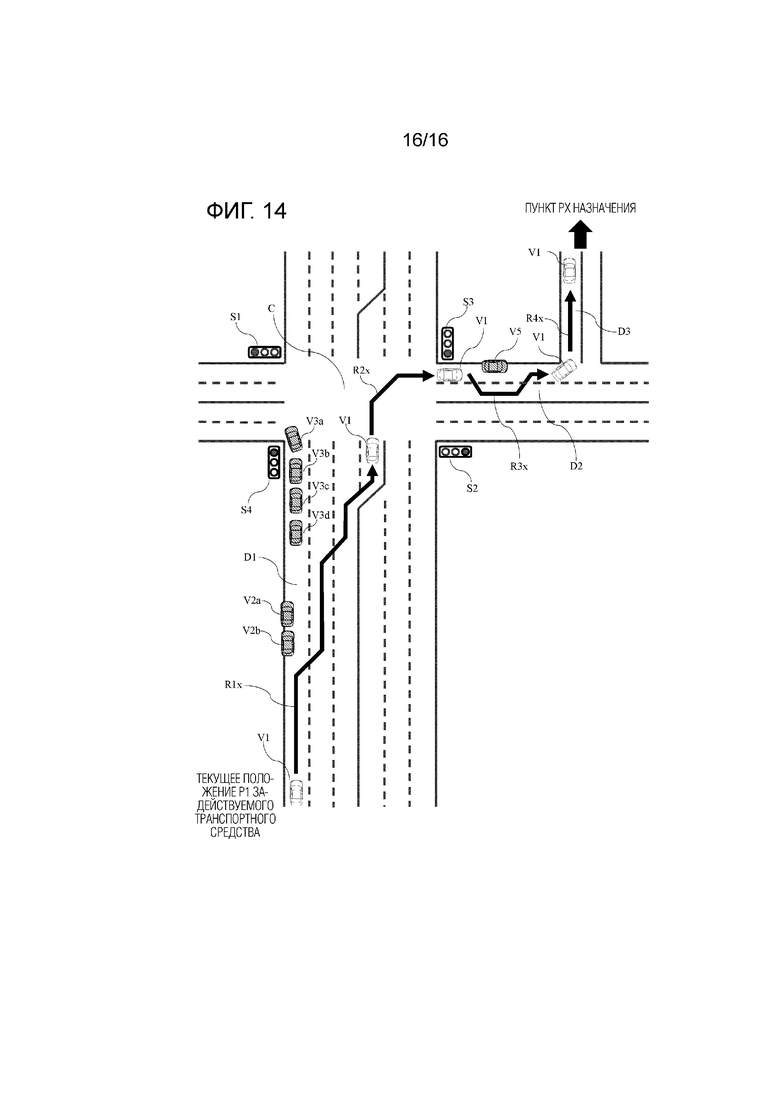
Группа изобретений относится к способу и устройству содействия движению для транспортного средства. Способ содержит этапы, на которых: при обнаружении объекта транспортным средством получают уровень опасности объекта; связывают уровень опасности объекта с местоположением столкновения и накапливают уровень опасности; используют накопленный уровень опасности в местоположении столкновения для получения первичного оценочного уровня опасности объекта; получают вторичный оценочный уровень опасности, с использованием предсказанного маневра движения другого транспортного средства, которое избегает опасность, обусловленную первичным оценочным уровнем опасности; при повторном движении в местоположении столкновения, автономно управляют движением транспортного средства с использованием вторичного оценочного уровня опасности. Первичный оценочный уровень опасности ниже уровня опасности, полученного при обнаружении объекта. Вторичный оценочный уровень опасности ниже первичного оценочного уровня опасности. Достигается оценка уровня опасности до достижения местоположения столкновения. 2 н. и 29 з.п. ф-лы, 16 ил.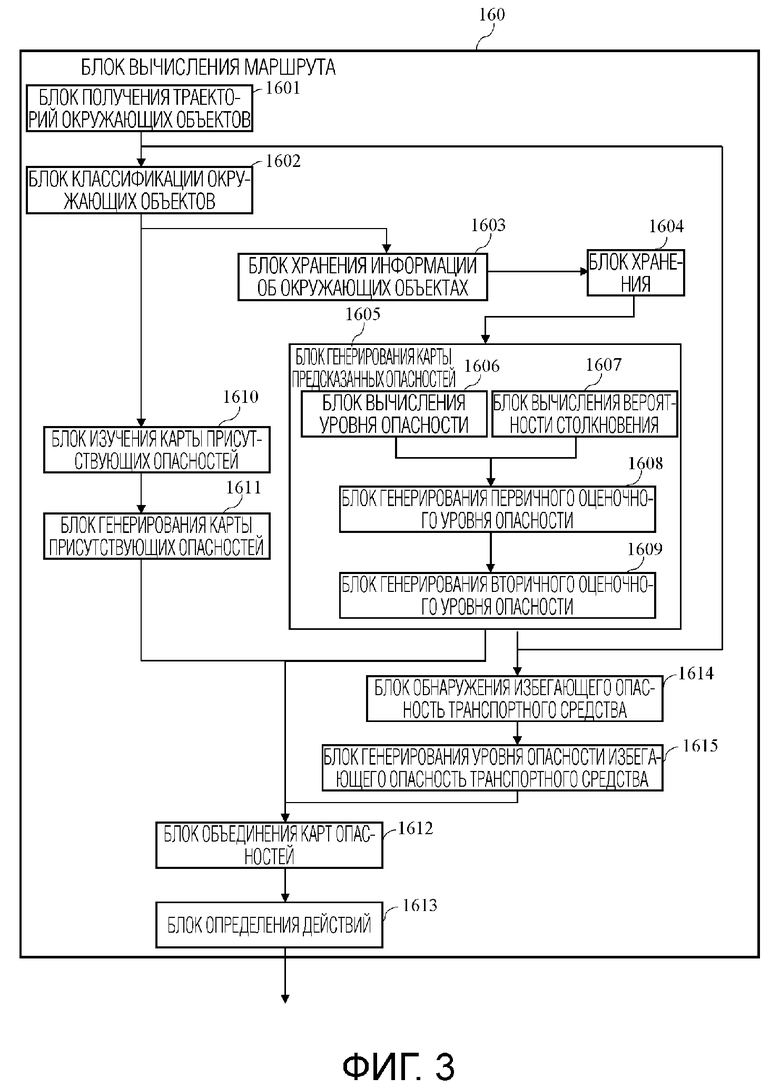
1. Способ содействия движению для транспортного средства, содержащий этапы, на которых:
при обнаружении объекта транспортным средством получают уровень опасности объекта;
связывают уровень опасности объекта с местоположением столкновения, в котором произойдет столкновение с объектом, и накапливают уровень опасности в местоположении столкновения;
используют накопленный уровень опасности в местоположении столкновения для получения первичного оценочного уровня опасности объекта, с которым предсказывается столкновение в местоположении столкновения, при этом первичный оценочный уровень опасности ниже уровня опасности, полученного при обнаружении объекта;
получают вторичный оценочный уровень опасности, который ниже первичного оценочного уровня опасности, с использованием предсказанного маневра движения другого транспортного средства, которое избегает опасность, обусловленную первичным оценочным уровнем опасности; и
при повторном движении в местоположении столкновения, автономно управляют движением транспортного средства с использованием вторичного оценочного уровня опасности.
2. Способ по п.1, в котором вторичный оценочный уровень опасности размещен позади местоположения столкновения на смежной полосе движения по отношению к полосе движения, соответствующей местоположению столкновения с первичным оценочным уровнем опасности.
3. Способ по п.1 или 2, в котором величина вторичного оценочного уровня опасности увеличивается пропорционально величине первичного оценочного уровня опасности.
4. Способ по п.2, содержащий этапы, на которых:
получают третичный или более высокий предсказанный уровень опасности во второй смежной полосе движения, которая является смежной по отношению к смежной полосе движения, с использованием вторичного оценочного уровня опасности; и
при повторном движении в местоположении столкновения автономно управляют движением транспортного средства с использованием третичного или более высокого предсказанного уровня опасности.
5. Способ по любому одному из пп.1-4, в котором при условии, что задействуемое транспортное средство осуществляет поворот налево, когда перекресток расположен позади первичного оценочного уровня опасности, размещенного в полосе движения после поворота налево относительно направления движения задействуемого транспортного средства, вторичный оценочный уровень опасности размещен в полосе движения, отличной от полосы движения, в которой первичный оценочный уровень опасности существует, среди полос движения после поворота налево или в течение поворота налево.
6. Способ по любому одному из пп.1-4, в котором при условии, что задействуемое транспортное средство осуществляет поворот направо, когда перекресток расположен позади первичного оценочного уровня опасности, размещенного в полосе движения после поворота направо относительно направления движения задействуемого транспортного средства, вторичный оценочный уровень опасности размещен в полосе движения, отличной от полосы движения, в которой первичный оценочный уровень опасности существует, среди полос движения после поворота направо или в течение поворота направо.
7. Способ по п.5 или 6, в котором при наличии двух или более полос движения, отличных от полосы движения, в которой существует первичный оценочный уровень опасности, вторичный оценочный уровень опасности размещен в полосе движения, ближайшей к первичному оценочному уровню опасности, среди полос движения, отличных от полосы движения, в которой существует первичный оценочный уровень опасности.
8. Способ по любому одному из пп.5-7, в котором опасность увеличивается у полосы движения со вторичным оценочным уровнем опасности вблизи первичного оценочного уровня опасности, среди вторичных оценочных уровней опасности, размещенных в двух или более полосах движения, по отношению к направлению движения задействуемого транспортного средства.
9. Способ по любому одному из пп.1-8, содержащий этапы, на которых:
при автономном управлении движением задействуемого транспортного средства обнаруживают объект вокруг задействуемого транспортного средства;
при обнаружении объекта получают присутствующий уровень опасности объекта;
вычисляют наивысший уровень опасности среди присутствующего уровня опасности, первичного оценочного уровня опасности и вторичного оценочного уровня опасности в качестве объединенной опасности; и
автономно управляют движением задействуемого транспортного средства с использованием объединенной опасности.
10. Способ по п.9, содержащий этап, на котором используют объединенную опасность, вычисленную из присутствующего уровня опасности, первичного оценочного уровня опасности и вторичного оценочного уровня опасности, для установки полосы движения, в которой двигаться задействуемому транспортному средству.
11. Способ по п.9 или 10, в котором при вычислении уровня опасности для одной и той же опасности присутствующий уровень опасности является наибольшим, первичный оценочный уровень опасности является вторым по величине, а вторичный оценочный уровень опасности является наименьшим.
12. Способ по любому одному из пп.1-11, содержащий этап, на котором автономно управляют движением задействуемого транспортного средства, с тем чтобы сменить полосы движения в направлении избегания вторичного оценочного уровня опасности.
13. Способ по п.1, содержащий этапы, на которых:
определяют, существует ли или нет другое транспортное средство, которое избегает опасность, обусловленную первичным оценочным уровнем опасности;
при определении того, что другое транспортное средство существует, получают уровень опасности избегающего опасность транспортного средства с использованием предсказанного маневра движения другого транспортного средства; и
автономно управляют движением транспортного средства с использованием уровня опасности избегающего опасность транспортного средства.
14. Способ по п.13, в котором уровень опасности избегающего опасность транспортного средства размещен позади местоположения столкновения в смежной полосе движения по отношению к полосе движения, соответствующей местоположению столкновения с первичным оценочным уровнем опасности.
15. Способ по п.13 или 14, в котором уровень опасности избегающего опасность транспортного средства размещен в том же положении, что и вторичный оценочный уровень опасности, полученный с использованием предсказанного маневра движения другого транспортного средства, которое избегает опасность, обусловленную первичным оценочным уровнем опасности.
16. Способ по любому одному из пп.13-15, в котором уровень опасности избегающего опасность транспортного средства получен посредством взвешивания вторичного оценочного уровня опасности, полученного с использованием предсказанного маневра движения другого транспортного средства, которое избегает опасность, обусловленную первичным оценочным уровнем опасности.
17. Способ по любому одному из пп.13-16, содержащий этапы, на которых:
при автономном управлении движением задействуемого транспортного средства обнаруживают объект вокруг задействуемого транспортного средства;
при обнаружении объекта получают присутствующий уровень опасности объекта;
вычисляют наивысший уровень опасности среди присутствующего уровня опасности, первичного оценочного уровня опасности, вторичного оценочного уровня опасности и уровня опасности избегающего опасность транспортного средства в качестве объединенной опасности; и
автономно управляют движением транспортного средства с использованием объединенной опасности.
18. Способ по п.17, содержащий этап, на котором используют объединенную опасность, вычисленную из присутствующего уровня опасности, первичного оценочного уровня опасности, вторичного оценочного уровня опасности и уровня опасности избегающего опасность транспортного средства, для установки полосы движения, в которой двигаться задействуемому транспортному средству.
19. Способ по любому одному из пп.13-18, содержащий этапы, на которых:
определяют, можно ли или нет избежать опасность, обусловленную уровнем опасности избегающего опасность транспортного средства; и
при определении того, что опасность, обусловленную уровнем опасности избегающего опасность транспортного средства, можно избежать, осуществляют смену полос движения для избегания опасности, обусловленной уровнем опасности избегающего опасность транспортного средства.
20. Способ по любому одному из пп.13-18, в котором при условии, что задействуемое транспортное средство поворачивает направо на перекрестке, когда существует другое транспортное средство, которое обращено к задействуемому транспортному средству и поворачивает налево, задействуемое транспортное средство не въезжает на перекресток.
21. Способ по любому одному из пп.13-18, в котором при условии, что задействуемое транспортное средство поворачивает направо на перекрестке, когда на перекрестке существуют две или более полосы движения для поворота направо и другое транспортное средство, которое обращено к задействуемому транспортному средству и поворачивает налево, полоса движения для поворота направо, в которой уровень опасности наименьший, выбирается из числа полос движения для поворота направо на перекрестке.
22. Способ по любому одному из пп.13-18, в котором при условии, что задействуемое транспортное средство поворачивает налево на перекрестке, когда существует другое транспортное средство, которое обращено к задействуемому транспортному средству и поворачивает направо, самая левая полоса движения среди полос движения после того, как задействуемое транспортное средство повернет налево, устанавливается в качестве полосы движения, в которой задействуемому транспортному средству двигаться после поворота налево.
23. Способ по любому одному из пп.13-18, содержащий этапы, на которых:
определяют, можно ли или нет избежать опасность, обусловленную уровнем опасности избегающего опасность транспортного средства; и
при определении того, что опасность, обусловленную уровнем опасности избегающего опасность транспортного средства, невозможно избежать и с опасностью будет столкновение, вновь вычисляют план движения, который исключает опасность, обусловленную уровнем опасности избегающего опасность транспортного средства, перед столкновением с опасностью, обусловленной уровнем опасности избегающего опасность транспортного средства.
24. Способ по п.23, в котором вновь вычисленный план движения представляет собой план движения, в котором задействуемое транспортное средство движется со скоростью транспортного средства, которая меньше установленной скорости транспортного средства, которую устанавливает водитель, на предварительно определенное значение или более.
25. Способ по п.23 или 24, в котором вновь вычисленный план движения представляет собой план движения таким образом, чтобы поддерживать относительную скорость транспортного средства между задействуемым транспортным средством и впереди идущим транспортным средством для задействуемого транспортного средства на предварительно определенной относительной скорости транспортного средства или менее.
26. Способ по любому одному из пп.23-25, в котором вновь вычисленный план движения представляет собой план движения для движения таким образом, чтобы поддерживать расстояние между транспортными средствами между задействуемым транспортным средством и впереди идущим транспортным средством для задействуемого транспортного средства на предварительно определенном расстоянии между транспортными средствами или более.
27. Способ по любому одному из пп.23-26, в котором вновь вычисленный план движения представляет собой план движения для движения таким образом, чтобы поддерживать расстояние между транспортными средствами между задействуемым транспортным средством и другим транспортным средством, которое избегает опасность, обусловленную первичным оценочным уровнем опасности, на предварительно определенном расстоянии между транспортными средствами или более.
28. Способ по любому одному из пп.23-27, в котором при условии, что задействуемое транспортное средство поворачивает направо на перекрестке, когда существует другое транспортное средство, которое обращено к задействуемому транспортному средству и поворачивает налево, вновь вычисленный план движения представляет собой план движения, в котором задействуемое транспортное средство ожидает на перекрестке.
29. Способ по любому одному из пп.23-27, в котором при условии, что задействуемое транспортное средство поворачивает направо на перекрестке, когда на перекрестке существуют две или более полосы движения для поворота направо и другое транспортное средство, которое обращено к задействуемому транспортному средству и поворачивает налево, вновь вычисленный план движения представляет собой план движения для выбора полосы движения для поворота направо, в которой уровень опасности является наименьшим из числа полос движения для поворота направо на перекрестке.
30. Способ по любому одному из пп.23-27, в котором при условии, что задействуемое транспортное средство поворачивает налево на перекрестке, когда существует другое транспортное средство, которое обращено к задействуемому транспортному средству и поворачивает направо, вновь вычисленный план движения представляет собой план движения, в котором задействуемое транспортное средство движется со скоростью транспортного средства, которая ниже установленной скорости транспортного средства, которую устанавливает водитель, на предварительно определенное значение или более.
31. Устройство содействия движению для транспортного средства, содержащее:
средство обнаружения для обнаружения объекта вокруг транспортного средства;
контроллер для получения уровня опасности, первичного оценочного уровня опасности и вторичного оценочного уровня опасности объекта и автономного управления движением транспортного средства с использованием вторичного оценочного уровня опасности; и
хранилище, в котором хранится информация об объекте, обнаруженном средством обнаружения, и информация об уровне опасности, полученном контроллером,
при этом контроллер выполнен с возможностью:
при обнаружении средством обнаружения объекта получать уровень опасности объекта;
связывать уровень опасности объекта с местоположением столкновения, в котором произойдет столкновение с объектом, и накапливать уровень опасности в местоположении столкновения в хранилище;
использовать уровень опасности в местоположении столкновения, накопленный в хранилище, для получения первичного оценочного уровня опасности объекта, с которым предсказывается столкновение в местоположении столкновения, причем первичный оценочный уровень опасности ниже уровня опасности, полученного при обнаружении объекта;
получать вторичный оценочный уровень опасности с использованием предсказанного маневра движения другого транспортного средства, которое избегает опасность, обусловленную первичным оценочным уровнем опасности; и
при повторном движении в местоположении столкновения автономно управлять движением транспортного средства с использованием вторичного оценочного уровня опасности.
| WO 2020044512 A1, 05.03.2020 | |||
| JP 2019106049 A, 27.06.2019 | |||
| JP 2019211830 A, 12.12.2019 | |||
| JP 2018058588 A, 12.04.2018. |

