Область техники, к которой относится изобретение
Настоящее изобретение относится, в общем, к магнитно-резонансной томографии, в частности, к катушечной конструкции магнитно-резонансной томографии, системе магнитно-резонансной томографии, способу позиционирования РЧ катушки для системы магнитно-резонансной томографии и долговременному машиночитаемому носителю.
Уровень техники
В магнитно-резонансной томографии (МРТ) в качестве приемников, передатчиков или комбинированных приемопередатчиков могут быть использованы радиочастотные (РЧ) катушки.
Обычно РЧ катушки могут быть использованы в качестве антенн для возбуждения ядерных спинов и детектирования сигналов от них. Широко используются для МРТ, в частности, поверхностные катушки, которые могут быть размещены на поверхности или вокруг поверхности обследуемого пациента, и объемные катушки, которые могут быть размещены так, чтобы окружать все тело или определенную область пациента, такую как голова или другие конечности. В качестве примера такие РЧ катушки могут быть предусмотрены в виде катушки типа "птичья клетка", поперечной электромагнитной (ТЕМ, от англ. transverse electromagnetic) резонаторной катушки и т.д.
Что касается качества МРТ, можно считать, что, например, расстояние до РЧ катушки от обследуемого пациента может быть фактором, влияющим на чувствительность РЧ катушки. Следовательно, это может быть также фактором для отношения сигнал/шум (SNR, от англ. signal-to-noise ratio) РЧ катушки, который может влиять на качество МРТ.
Однако во время получения изображения, в частности, на расстояние от катушки до пациента может влиять несколько факторов, например, движение пациента, вдох или выдох пациента и т.д.
В патентном документе US 2015/0293188 А1 описан способ позиционирования по меньшей мере одной локальной катушки для записи магнитно-резонансных данных с помощью магнитно-резонансного устройства, причем измеряют по меньшей мере одну запись поверхностных данных, которая описывает поверхность пациента, подлежащего регистрации, который уже расположен для регистрации на кушетке для пациента магнитно-резонансного устройства, извлекают поверхностную характеристику пациента из записи поверхностных данных и выбирают по меньшей мере одно положение и/или форму по меньшей мере одной из по меньшей мере одной локальной катушки в зависимости от поверхностной характеристики таким образом, чтобы было обеспечено предварительно заданное расстояние между поверхностью пациента и поверхность локальной катушки.
Раскрытие сущности изобретения
Поэтому может возникнуть необходимость в улучшении магнитно-резонансной томографии, в частности в отношении улучшения отношения сигнал/шум (SNR) радиочастотной (РЧ) катушки.
Задача настоящего изобретения решена объектом независимых пунктов формулы, при этом дополнительные варианты осуществления включены в зависимые пункты формулы изобретения.
В соответствии с одним аспектом, предусмотрена катушечная конструкция магнитно-резонансной томографии (МРТ), которая содержит базовую конструкцию, имеющую изменяемую форму, и по меньшей мере одну РЧ катушку, расположенную на базовой конструкции или по меньшей мере частично в ней. Катушечная конструкция МРТ дополнительно содержит исполнительное средство, проходящее вдоль базовой конструкции таким образом, что базовая конструкция может деформироваться вдоль и/или вокруг по меньшей мере одной оси, чтобы, например, образовать приемное пространство для обследуемого пациента, и средство детектирования положения, выполненное с возможностью детектирования текущего положения по меньшей мере части пациента, в частности относительно РЧ катушки и/или системы МРТ. Катушечная конструкция МРТ дополнительно содержит средство управления, соединенное со средством детектирования положения и с исполнительным средством, при этом средство управления выполнено с возможностью регулирования формы базовой конструкции для поддержания контакта внешней поверхности базовой конструкции и/или РЧ катушки по меньшей мере с частью пациента путем приведения в действие исполнительного средства в ответ на детектированное изменение текущего положения относительно предыдущего положения по меньшей мере части пациента. Другими словами, в частности, во время визуализации (томографии) базовая конструкция и/или РЧ катушка могут находиться, предпочтительно, в непосредственном контакте с пациентом или его поверхностью. Чтобы поддерживать этот контакт даже при движении пациента, форма базовой конструкции регулируется соответствующим образом.
Катушечная конструкция МРТ может быть предусмотрена в виде локальной РЧ катушечной конструкции любого типа, такой как поверхностная РЧ катушка, объемная РЧ катушка и т.д., и, в частности, в виде РЧ катушки типа "птичья клетка", поперечной электромагнитной (ТЕМ) РЧ катушки или т.п.
Изменяемая форма базовой конструкции может быть предусмотрена, например, за счет использования гибкого материала, который допускает деформацию, например изгиб, увеличение размера, уменьшение размера или т.п. Это может позволить изменять геометрическую форму, в частности внешнюю форму, базовой конструкции от плоской формы до различных кривизн, и наоборот. Фактическая РЧ катушка, расположенная внутри или на базовой конструкции, может быть жесткой или гибкой и может быть предусмотрена в виде (антенной) решетки. Исполнительное средство может быть предусмотрено с возможностью механического или гидравлического (по текучей среде) управления. Кроме того, оно может быть магнитно-резонансно совместимым и, например, может управляться оптическими сигналами или т.п.В качестве примера, исполнительное средство может быть предусмотрено в виде источника давления, такого как компрессор или т.п., и может быть выполнено как единое целое с катушечной конструкцией МРТ, так и отдельно от нее. Средство детектирования положения может быть подходящим датчиком, выполненным с возможностью детектирования абсолютного положения, относительного положения и/или движения пациента или части его тела. Средство управления может быть любым электронным устройством, содержащим процессор, запоминающий блок и/или блок памяти, коммуникационный интерфейс и т.д.
Приведение в действие исполнительного средства может приводить к изменению формы базовой конструкции, в результате чего, например, базовая конструкция и/или РЧ катушка могут быть смещены относительно предыдущего положения и/или субъекта или пациента. Это может позволить обеспечить по меньшей мере частичную компенсацию детектированного изменения текущего положения относительно предыдущего положения. Кроме того, базовая конструкция может быть оптимальным образом адаптирована к форме пациента, например телу или части тела. Следовательно, катушечная конструкция МРТ может быть расположена на близком и/или заданном расстоянии от тела и/или в контакте с ним, и таким образом может быть достигнуто лучшее SNR, а также лучшее качество изображения. Кроме того, может быть облегчено позиционирование катушечной конструкции МРТ в точном положении. Следовательно, занимающие много времени фиксация и подгонка, которыми обычно занимается лечащий персонал, могут быть опущены, и общий рабочий процесс может быть оптимизирован. Кроме того, напряжение пациента во время позиционирования катушечной конструкции МРТ может быть уменьшено.
В одном варианте осуществления исполнительное средство может быть расположено на стороне катушки, обращенной в сторону от пациента.
Таким образом, исполнительное средство может толкать катушку в направлении пациента. Это может дополнительно улучшить позиционирование РЧ катушки на определенном минимальном расстоянии относительно пациента, например поверхности пациента.
В соответствии с одним вариантом осуществления исполнительное средство может содержать один или более трубопроводов, соединенных со средством управления и выполненных с возможностью управления ими посредством средства управления.
Один или более трубопроводов могут быть выполнены, например, для транспортировки текучей среды, например жидкой или газообразной среды, или для приведения в движение механического элемента, который, в свою очередь, может быть приведен в действие исполнительным средством. Например, трубопроводы могут быть герметичными для текучей среды и выполнены с возможностью приведения в действие исполнительным средством с помощью воздуха, в частности пневматически.
В одном варианте осуществления по меньшей мере два трубопровода могут открываться (выходить) в расположенные на расстоянии друг от друга секции базовой конструкции и могут быть выборочно управляемыми.
Следовательно, базовой конструкции можно придать различные формы и кривизны.
В соответствии с одним вариантом осуществления в трубопроводе может проходить нитевидный элемент, который может находиться в зацеплении с базовой конструкцией.
Нитевидный элемент может быть выполнен в виде троса, например троса Боудена или т.п. Предпочтительно, нитевидный элемент может быть немагнитным, например изготовленным из пластмассы, чтобы быть магнитно-резонансно совместимым. Конец нитевидного элемента, обращенный в сторону от исполнительного средства, может быть сцеплен с базовой конструкцией. Для этого деформируемая базовая конструкция может иметь крепежную конструкцию, например шарнирную полосу или т.п., которая позволяет зацеплению с соответствующей частью деформируемой базовой конструкции находиться в требуемом положении рядом с телом пациента, или вся конструкция находится/формируется вблизи пациента.
В одном варианте осуществления по меньшей мере один трубопровод может быть соединен на одном конце с источником давления, а на другом конце открывается по текучей среде (выходит) по меньшей мере к одной подушке, имеющей изменяемую форму.
Соответственно, исполнительное средство может быть предусмотрено в виде источника давления или может содержать его. Одну или более подушек можно также называть внутренней подушкой или внутренними подушками, и они могут быть, в частности, неотъемлемой частью катушечной конструкции МРТ. Источник давления, который также может называться исполнительным средством, может быть выполнен с возможностью обеспечения положительного или отрицательного давления относительно давления окружающей среды.
В соответствии с одним вариантом осуществления по меньшей мере одна подушка может быть выполнена с возможностью предоставления сигнала обратной связи, указывающего внешнее давление, приложенное по меньшей мере к одной подушке. Исполнительное средство может быть приведено в действие в ответ на этот сигнал обратной связи.
В одном варианте осуществления по меньшей мере одна подушка может быть расположена на стороне базовой конструкции и/или РЧ катушки, обращенной в сторону от контактирующей с пациентом стороны.
Подушка может быть расположена таким образом, чтобы она давила на РЧ катушку и/или базовую конструкцию таким образом, чтобы вызвать смещение базовой конструкции и/или РЧ катушки относительно пациента и/или системы МРТ. Подушка может быть расположена таким образом, чтобы заполнять пространство между катушечной конструкцией МРТ и внутренней стороной туннеля системы МРТ. Одна или более подушек могут быть одноразовыми и могут съемно прикрепляться к катушечной конструкции МРТ.
В соответствии с одним вариантом осуществления средство детектирования положения может управляться с частотой взятия отсчетов, позволяющей детектировать смещение органа пациента и, в соответствии с этим, управлять исполнительным средством.
Это может обеспечить относительно быструю деформацию или изменение формы базовой конструкции. Кроме того, это может позволить компенсировать респираторные/дыхательные, сердечные движения пациента и т.д. Кроме того, может быть детектировано и/или компенсировано движение пациента в целом или его частей, например рук или ног.
В соответствии с одним вариантом осуществления средство детектирования положения может содержать один или более датчиков расстояния, выполненных с возможностью предоставления информации о расстоянии между поверхностью пациента и катушкой.
Датчики расстояния могут быть распределены, в частности равномерно распределены, чтобы обеспечить детектирование даже небольших движений или смещений.
Дополнительно или альтернативно, средство детектирования положения может управляться посредством воздуха и может быть выполнено с возможностью детектирования внешне приложенного давления, указывающего на контакт с пациентом.
В одном варианте осуществления средство управления может быть дополнительно соединено со средством определения деформации, выполненным с возможностью предоставления информации о текущей деформации базовой конструкции.
Например, средство определения может быть расположено на базовой конструкции или по меньшей мере частично в ней. В одном примере средство определения может содержать датчик деформаций, выполненный на оптическом волокне, или оптических волокнах с брэгговскими решетками, которые выполнены с возможностью предоставления сигнала обратной связи в реальном времени, связанного с его собственной динамической формой, которая соответствует или связана с формой базовой конструкции и/или РЧ катушек, или тому подобным. Таким образом, формы и/или положения управляемого удлиненного инструмента могут быть динамически определены с помощью оптических волокон, включающих в себя брэгговские решетки. Работа средства определения может включать в себя прием отраженного сигнала от датчика деформаций, определение спектрального профиля отраженного сигнала и определение деформации оптического волокна на основе сравнения спектрального профиля отраженного сигнала с предварительно заданным спектральным профилем.
В соответствии с одним вариантом осуществления базовая конструкция дополнительно может содержать средство детектирования давления, выполненное с возможностью регистрации давления, оказываемого пациентом на базовую конструкцию, при этом средство управления может быть дополнительно выполнено с возможностью приведения в действие исполнительного средства для компенсации зарегистрированного давления.
Это может позволить получить сигнал обратной связи на перемещение пациента. Кроме того, это может позволить синхронизировать расстояние до РЧ катушки относительно респираторных/дыхательных, сердечных движений пациента и т.д. для постоянного качества изображения.
В одном варианте осуществления средство управления может быть дополнительно соединено с системой магнитно-резонансной томографии и выполнено с возможностью предоставления сигнала захвата изображения, побуждающего систему томографии выполнять визуализацию только тогда, когда положение РЧ катушки относительно пациента компенсировано.
Компенсация может быть связана с движением и/или перемещением пациента относительно РЧ катушки. Это может еще больше улучшить качество изображения.
В соответствии с одним вариантом осуществления базовая конструкция может содержать пленку, на которой напечатана катушка.
Это может обеспечить возможность деформации РЧ катушки, общей с деформацией базовой конструкции. Кроме того, катушечная конструкция может быть небольшого размера, в частности тонкой.
В одном варианте осуществления базовая конструкция может содержать первую пленку и вторую пленку, которые образуют слоистую конструкцию типа "сэндвич" с РЧ катушкой, расположенной между ними, причем пленка может содержать на стороне катушки, обращенной к пациенту, по меньшей мере одно отверстие, открывающееся по текучей среде к источнику давления.
Это может обеспечить гибкую двухстороннюю пленочную систему с интегрированной РЧ катушкой. На стороне, обращенной к пациенту, могут быть предусмотрены отверстия, например сетка, пеноматериал, мембрана и т.д. При обеспечении отрицательного давления, в частности вакуума, пленочная система может прилипать к пациенту. Давление может быть приложено через каналы, трубопроводы или тому подобное, встроенные в пленочную систему. Подходящее распределение впускных фитингов, впускных гнезд может обеспечить хорошее соединение пленки и пациента на всех границах и однородным образом, особенно в положении РЧ катушки, чтобы получить заданное расстояние от катушки до пациента. Кроме того, биосовместимая жидкость, такая как гель, клей или тому подобное, может обеспечить надлежащую или заданную адгезию сенсорной катушечной системы на основе пленки к пациенту.
В соответствии с одним аспектом предусмотрена система магнитно-резонансной томографии (система МРТ). Система МРТ также может быть названа МРТ сканером, линейным ускорителем (linac, от англ. linear accelerator) или тому подобным и может содержать туннель, кушетку для поддержки обследуемого пациента, выполненную с возможностью выборочного перемещения в туннель, и РЧ катушечную конструкцию. Катушечная конструкция содержит базовую конструкцию, имеющую изменяемую форму, по меньшей мере одну РЧ катушку, расположенную на базовой конструкции или в ней, исполнительное средство, проходящее вдоль базовой конструкции таким образом, что базовая конструкция может деформироваться вдоль и/или вокруг по меньшей мере одной оси с образованием приемного пространства для пациента, средство детектирования положения, выполненное с возможностью детектирования изменения положения по меньшей мере части обследуемого пациента относительно РЧ катушки, и средство управления, соединенное со средством детектирования положения и исполнительным средством, причем средство управления выполнено с возможностью приведения в действие исполнительного средства в ответ на детектированное изменение текущего положения относительно предыдущего положения.
В одном варианте осуществления система магнитно-резонансной томографии может содержать по меньшей мере одну подушку, имеющую изменяемую форму и расположенную на внутренней стенке туннеля, и выполненную с возможностью прижатия катушечной конструкции к пациенту.
Подушка может быть расположена на стороне базовой конструкции и/или РЧ катушки, обращенной в сторону от контактирующей с пациентом стороны.
Подушка может также называться внешней подушкой, в частности по отношению к катушечной конструкции, и может быть расположена на стороне РЧ катушки и/или базовой конструкции, обращенной в сторону от пациента и/или кушетки. Подушка может быть управляемой по текучей среде и может быть соединена с исполнительным средством. Она может быть выполнена с возможностью по меньшей мере частичной компенсации детектированных движений и/или любых перемещений пациента. Она может быть расположена таким образом, чтобы позволить катушечной конструкции быть выдвинутой в направлении пациента и/или кушетки. Одна или более подушек могут быть одноразовыми и могут съемно прикрепляться к системе МРТ. Кроме того, одна или более подушек могут быть расположены в немагнитном рукаве.
В соответствии с одним вариантом осуществления могут быть предусмотрены два или более мешка или две или более подушки, причем два или более мешка имеют сравнительно меньший индивидуальный объем, в частности по сравнению с одним мешком или подушкой. Затем исполнительное средство может быть функционально связано с каждым из двух или более мешков или подушек для индивидуального накачивания и/или сдувания соответствующих мешков или подушек.
Таким образом, используя эти несколько малых подушек или мешков, давление на пациента и/или РЧ катушку можно регулировать более точно.
В одном варианте осуществления исполнительное средство может быть соединено по меньшей мере с одной управляемой по текучей среде подушкой, встроенной в кушетку.
Одна или более подушек могут называться внешней подушкой или внешними подушками. Она может съемно прикрепляться к удерживающей конструкции, например выемке, фиксирующим зажимам или тому подобному. Одна или более подушек могут быть одноразовыми. Подушка может быть выполнена с возможностью предоставления сигнала обратной связи, вызванного измерением давления внутри подушки, указывающего на движение, перемещение и/или смещение пациента, когда измеряемое давление изменяется, например уменьшается или увеличивается.
В одном варианте осуществления базовая конструкция может быть расположена внутри покрывала, выполненного с возможностью покрытия пациента и подлежащего накачиванию по текучей среде или сдуванию с помощью источника давления.
Источник давления может называться исполнительным средством. Покрывало может быть немагнитным.
В соответствии с одним вариантом осуществления покрывало содержит двухстеночную конструкцию, а источник давления соединен по текучей среде с пространством, заключенным между двумя указанными стенками.
Путем обеспечения, например, отрицательного давления, например вакуума, в пространстве между двумя стенками фиксируется мешкообразная форма покрывала, и отрицательное давление между покрывалом и пациентом может быть высвобождено.
В соответствии с одним аспектом предложен способ позиционирования РЧ катушки для системы магнитно-резонансной томографии относительно обследуемого пациента. Способ включает в себя:
- детектирование текущего положения по меньшей мере части пациента относительно РЧ катушки, и
- приведение в действие исполнительного средства, проходящего вдоль базовой конструкции, в которой или на которой расположена РЧ катушка, таким образом, чтобы базовая конструкция могла деформироваться вдоль и/или вокруг по меньшей мере одной оси в ответ на детектированное изменение положения пациента относительно катушки между детектированным текущим положением и предыдущим положением.
Способ может позволить по меньшей мере частично компенсировать детектированное движение и/или смещение пациента. Он также может позволить синхронизировать форму РЧ катушки с любым движением, вызванным дыханием, сердечным движением или движением пациента в целом, чтобы обеспечить хорошее и/или постоянное качество изображения.
В соответствии с одним аспектом обеспечен долговременный машиночитаемый носитель. Машиночитаемый носитель содержит сохраненные на нем последовательности инструкций, причем последовательности инструкций включают в себя инструкции, которые при исполнении компьютерной системой побуждают компьютер выполнять вышеуказанный способ.
Машиночитаемый носитель может, в частности, быть обработан вышеуказанной системой МРТ и/или вышеуказанной катушечной конструкцией МРТ.
Эти и другие аспекты настоящего изобретения станут очевидными и будут разъяснены со ссылкой на варианты осуществления, описанные ниже.
Краткое описание чертежей
Примерные варианты осуществления изобретения будут описаны ниже со ссылкой на прилагаемые чертежи:
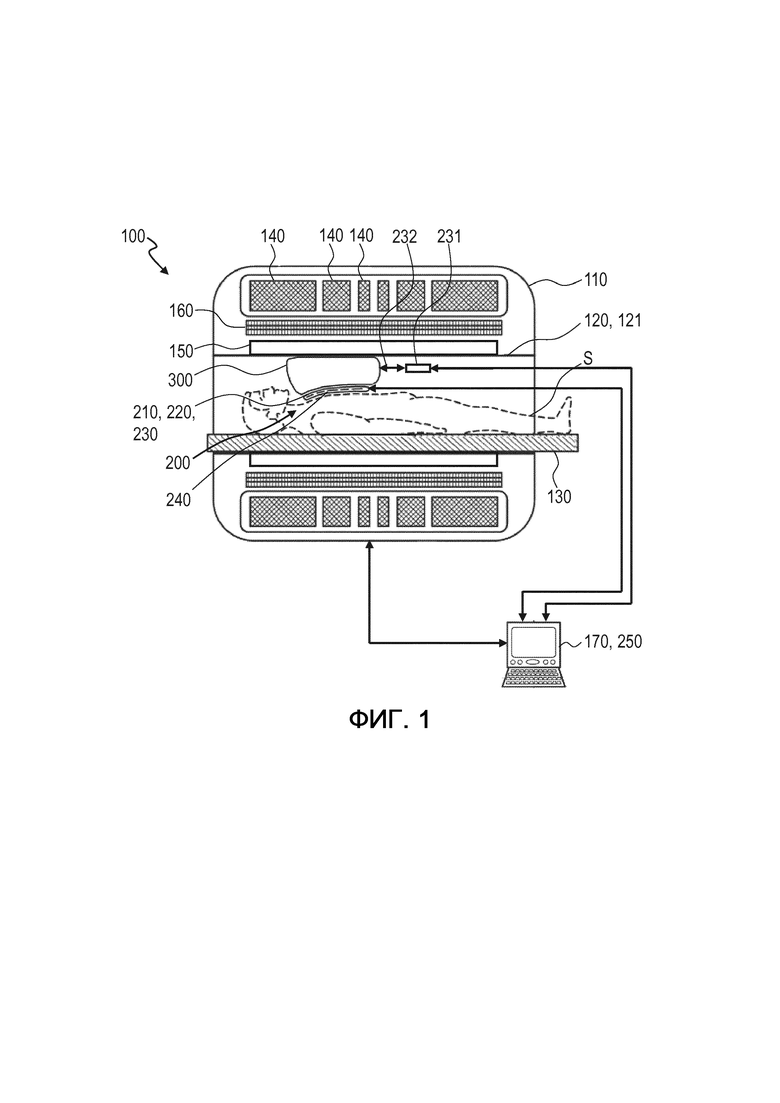
На фиг. 1 показан вариант осуществления схематически проиллюстрированной системы МРТ с туннелем, катушечной конструкцией и подушкой.
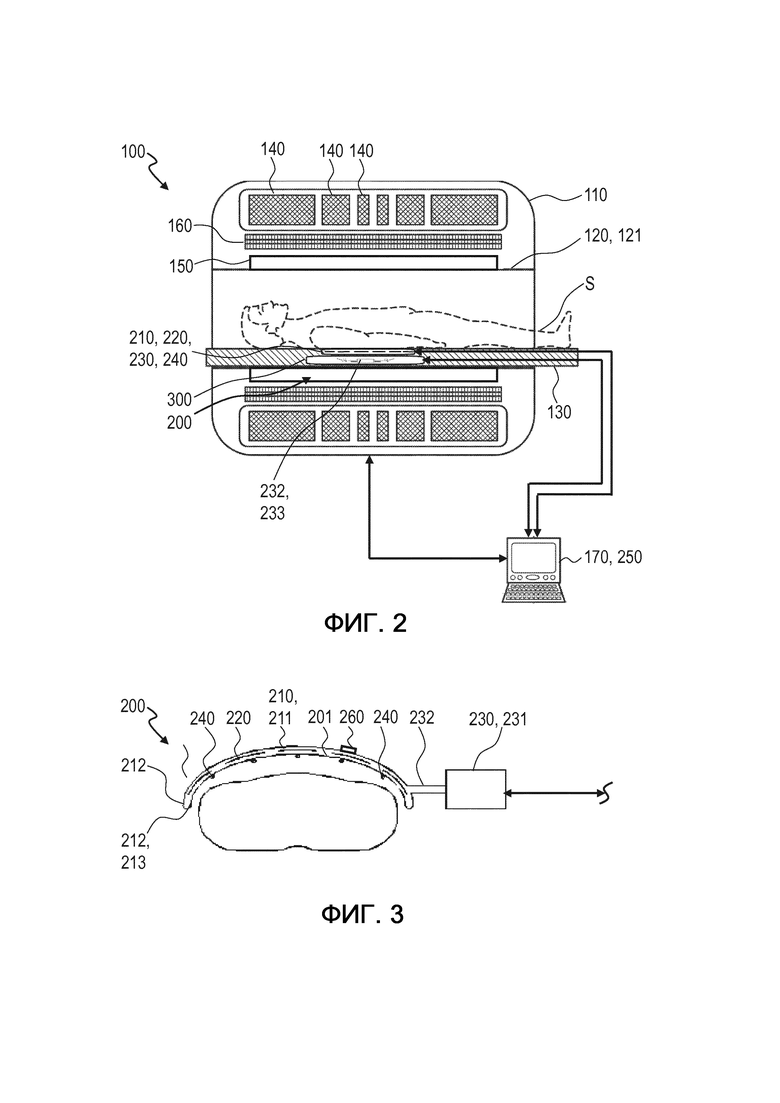
На фиг. 2 показан другой вариант осуществления схематически проиллюстрированной системы МРТ с туннелем, катушечной конструкцией и подушкой.
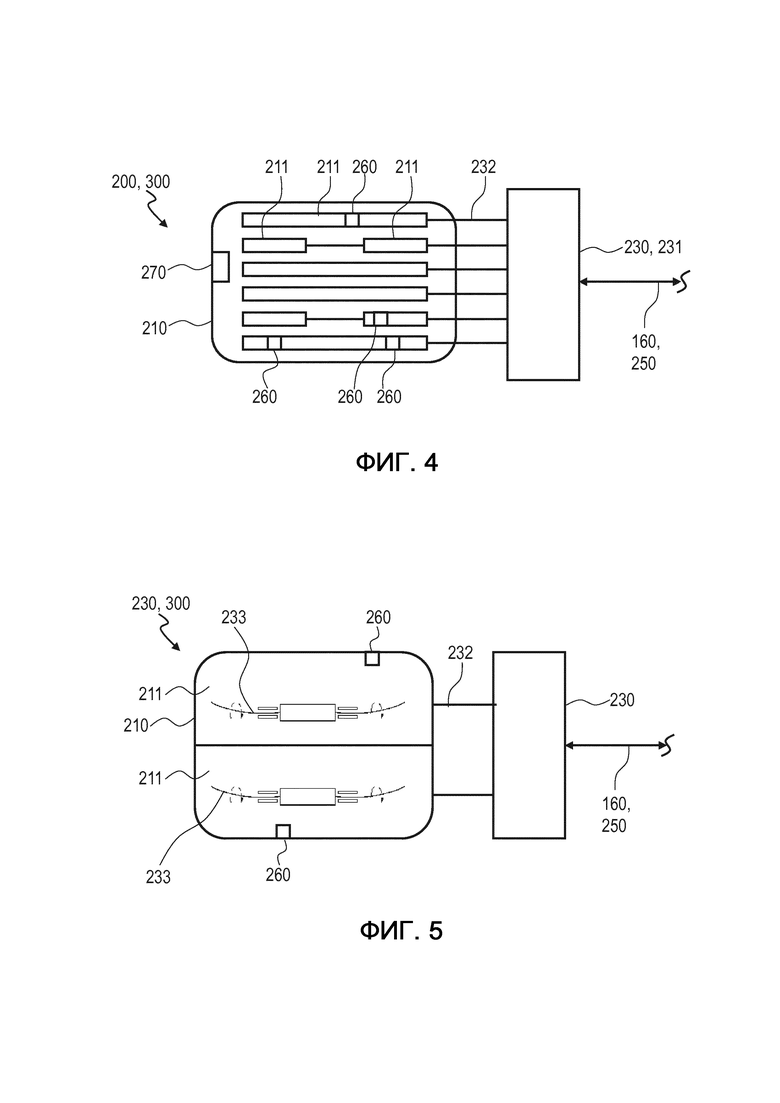
На фиг. 3 показан вариант осуществления схематически проиллюстрированной катушечной конструкции.
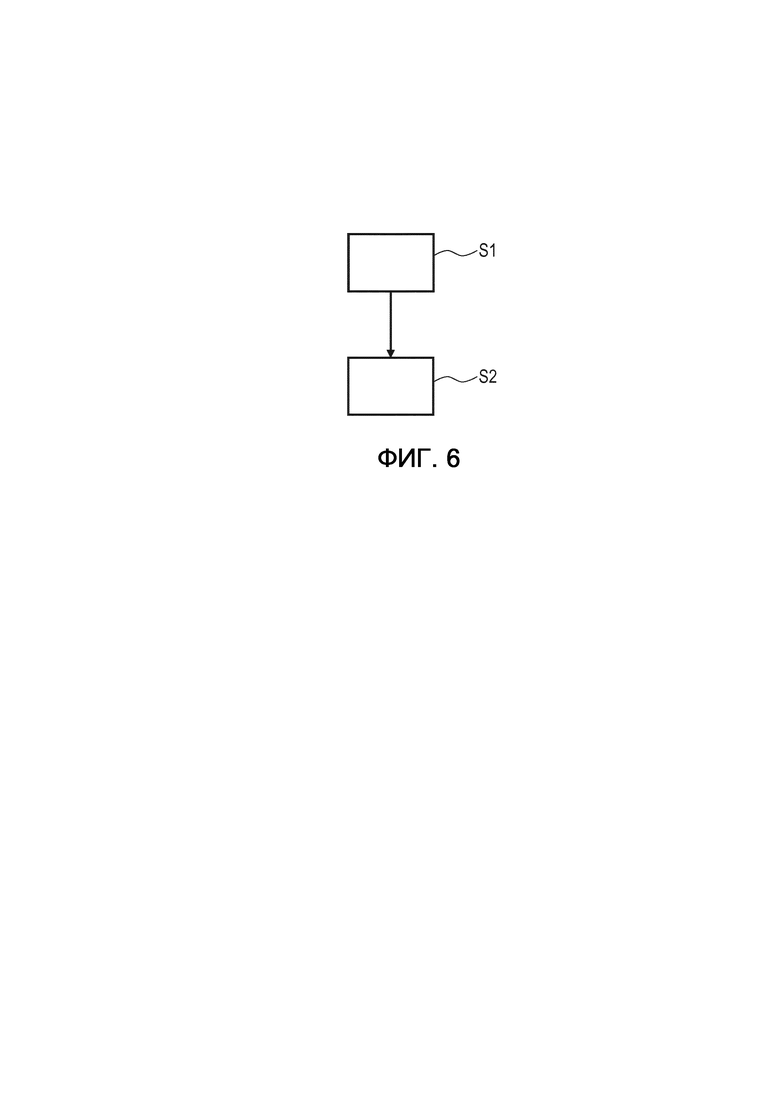
На фиг. 4 показан вариант осуществления схематически проиллюстрированного исполнительного средства.
На фиг. 5 показан вариант осуществления схематически проиллюстрированного исполнительного средства.
На фиг. 6 показана блок-схема способа позиционирования РЧ катушки относительно обследуемого пациента.
Осуществление изобретения
На фиг. 1 в схематическом поперечном разрезе показан вариант осуществления системы 100 магнитно-резонансной томографии (системы МРТ). Она содержит корпус 110, имеющий туннель 120, который определяет область исследования для обследуемого пациента S. В качестве примера, туннель 120 имеет цилиндрическую форму, причем также могут быть использованы другие геометрические конфигурации, такие как открытая магнитно-резонансная геометрическая конфигурация. Пациент S, который также может быть назван субъектом, подлежащим визуализации, помещен на кушетку 130, выполненную с возможностью выборочного перемещения в туннель 120. Система 100 МРТ содержит главный магнит 140, который выполнен с возможностью генерирования статического основного (В0) магнитного поля в исследуемой области внутри туннеля 120. Возбужденный магнитный резонанс, который, в частности, может быть возбужден интегрированной в систему РЧ катушкой 150 для всего тела, например типа "птичья клетка", ТЕМ или решеточной катушкой, образованной рамками (петлями), диполями, полосковыми (стриповыми) линиями или их комбинациями, может быть пространственно закодирован, сдвинут по фазе и/или частоте или иным образом управляемым градиентами магнитного поля, выборочно генерируемыми набором градиентных катушек 160 магнитного поля. Системой 100 МРТ управляют и/или ее эксплуатируют с помощью средства 170 управления, которое для простоты показано здесь в виде компьютерной системы. Она может содержать несколько подсистем, не указанных здесь, таких как процессор, восстанавливающий процессор, память данных для хранения компьютерных программных элементов и/или изображений пациента S, контроллер сбора магнитно-резонансных данных и т.д., и может быть выполнена с возможностью генерации, пространственного кодирования и считывания магнитно-резонансных данных, для восстановления посредством процессора магнитно-резонансной реконструкции для генерации одного или более изображений пациента S.
Для детектирования магнитного резонанса, который может быть выборочно возбужден, в исследуемой области расположены одна или более радиочастотных (РЧ) катушечных конструкций 200. На данной примерной иллюстрации одна РЧ катушечная конструкция 200 представлена в виде локальной катушки, которая выполнена в виде локальной грудной катушки таким образом, чтобы быть обращенной к передней стороне лежащего пациента S. Следует отметить, что РЧ катушечная конструкция 200 может быть катушкой другого типа, выполненной с возможностью размещения в других областях пациента S, например головная катушка или тому подобное. Как правило, катушечная конструкция 200 может быть выполнена в виде катушки типа "птичья клетка", поперечной электромагнитной (ТЕМ) резонаторной катушки, рамочной решетки, решетки из полосковых линий, диполя и т.д. Следует отметить, что РЧ катушечная конструкция 200 может быть выполнена только как приемная или передающая/ приемная, приемопередающая катушка.
Катушечная конструкция 200 содержит базовую конструкцию 210, имеющую изменяемую форму таким образом, чтобы быть деформируемой. Базовая конструкция 210 изготовлена из любого подходящего материала, который обеспечивает изменяемую форму, и который является магнитно-резонансно совместимым. На базовой конструкции 210 расположены или, как показано на фиг. 1, в базовую конструкцию 210, встроены одна или более РЧ катушек 220, которые также могут называться антенной и могут быть выполнены в виде решетки. Следует отметить, что РЧ катушки 220 проиллюстрированы схематически и могут содержать один или более фактических катушечных/антенных проводников, включая аналоговый/цифровой предусилитель, расстраивающую электронику и т.д. РЧ катушки 220 могут быть выполнены с возможностью их деформирования по меньшей мере существенно при изменении формы базовой конструкции 210. Исполнительное средство 230 (см., например, фиг. 3 и 4) проходит по меньшей мере частично вдоль базовой конструкции 210 таким образом, чтобы базовая конструкция 210 могла деформироваться вдоль и/или вокруг по меньшей мере одной оси, что будет описано более подробно ниже. Катушечная конструкция 200 дополнительно содержит средство 240 детектирования положения (см., например, фиг. 3 для получения более подробной информации), которое выполнено с возможностью детектирования текущего положения по меньшей мере части пациента S относительно РЧ катушки 220 и/или базовой конструкции 210. Средство 240 детектирования положения может быть предусмотрено в качестве датчика расстояния или аналогичного устройства и будет описано более подробно ниже. К исполнительному средству 230 и средству 240 детектирования положения присоединено средство 250 управления, которое в данном варианте осуществления, например, встроено в средство 170 управления системы 100 МРТ. Катушечная конструкция 200 соединена со средством 170 и/или 250 управления через соответствующее соединение для передачи данных. В частности, средство 170, 250 управления соединено с исполнительным средством 230 таким образом, чтобы приводить в действие исполнительное средство 230 в ответ на движение и/или перемещение пациента S, детектированное средством 240 детектирования положения. Таким образом, может быть достигнута по меньшей мере частичная компенсация детектированного движения пациента S. Как показано на фиг. 1, форма катушечной конструкции 200 может быть адаптирована в режиме реального времени к форме поверхности тела пациента S, причем в образцовой конструкции в области грудной клетки, например, любой подъем и опускание грудной клетки можно понимать как движение. В этом отношении любое другое перемещение конечностей или органов может рассматриваться как движение. Для компенсации таких движений средство 240 детектирования положения может управляться с частотой взятия отсчетов, позволяющей детектировать смещение органа пациента S и, в соответствии с этим, управлять исполнительным средством 230.
Средство 170 управления дополнительно выполнено с возможностью предоставления сигнала захвата изображения, побуждающего систему томографии выполнять визуализацию только тогда, когда положение, движение, смещение пациента S компенсировано.
Далее, со ссылкой на фиг. 1, в туннеле 120 расположен подушкообразный элемент 300 давления, далее именуемый мешком или подушкой, который конструктивно может быть отнесен либо к системе 100 МРТ, либо к катушечной конструкции 200. Исполнительное средство 230 содержит источник 231 давления, такой как компрессор или тому подобное, для накачивания и/или сдувания, например, путем обеспечения одного или более выпускных клапанов, подушки 300, через один или более трубопроводов 232, в ответ на детектированное движение. Деформируя подушку 300, например, накачивая и/или сдувая одну или более ее герметичных секций, мешок или подушка 300 могут придавать базовой конструкции 210 и/или РЧ катушкам 220 такую форму, чтобы она адаптировалась к изменяющейся поверхности тела пациента S. По меньшей мере в некоторых вариантах осуществления могут быть предусмотрены два или более мешка или подушек 300, имеющих сравнительно меньший индивидуальный объем, в частности по сравнению с одним мешком или подушкой 300. Исполнительное средство 230 затем может быть функционально связано с каждым из двух или более мешков или подушек 300 для индивидуального накачивания и/или сдувания соответствующих мешков или подушек 300. По меньшей мере в некоторых вариантах осуществления РЧ катушка 220 может быть встроена в один или более мешков или подушек 300. В другом варианте осуществления один или более мешков могут быть встроены в РЧ катушку. Один или более мешков или подушек 300 расположены на внутренней стенке 121 туннеля 120 и съемно прикреплены там. Таким образом, один или более мешков или подушек 300 могут использовать внутреннюю стенку 121 в качестве упора. Хотя на фиг. 1 не показано, они также могут быть расположены в углублении или т.п. внутренней стенки 121.
На фиг. 2 показан в схематическом поперечном разрезе еще один вариант системы 100 МРТ. Он отличается от вышеприведенного тем, что подушка 300 альтернативно или дополнительно расположена в кушетке 130 и тем, что, например, исполнительное средство 230 содержит механическую приводную систему, имеющую один или более нитевидных элементов 233 (для получения более подробной информации см. фиг. 5), таких как трос Боудена или т.п., встроенный в несколько участков подушки 300. Посредством приведения в действие нитевидных элементов 233 подушка 300 изменяет свою форму, в частности свою внешнюю геометрическую форму, чтобы адаптироваться к поверхности тела пациента S. Подушка 300 встроена в кушетку 130, которая может для этой цели иметь углубление и подходящие крепежные средства для съемного крепления.
На фиг. 3 схематически проиллюстрирована катушечная конструкция 200 более подробно. Она содержит базовую конструкцию 210, несущую РЧ катушки 220 и имеющую множество разделенных, герметичных для текучей среды секций 211 (для получения более подробной информации см. фиг. 4), проходящих вдоль базовой конструкции 210. Секции 211 соединены с источником 231 давления через трубопроводы 232. Источник 231 давления управляемым образом соединен со средством 170, 250 управления, как указано необозначенной линией передачи данных, и может быть накачан и/или сдут в секциях. На стороне базовой конструкции 210 и/или РЧ катушек 220, обращенных к пациенту S, вышеупомянутые средства 240 детектирования положения расположены таким образом, чтобы детектировать, например, путем измерения расстояния до пациента S в реальном времени, движение и/или смещение пациента S относительно катушечной конструкции 200. В ответ на любое детектированное движение и/или смещение средство 170, 250 управления может приводить в действие исполнительное средство 230, в частности источник давления 231, таким образом, чтобы адаптировать форму базовой конструкции 210 и/или РЧ катушек 220 к поверхности тела пациента S, как схематически показано на фиг. 3.
Далее, со ссылкой на фиг. 3, в некоторых вариантах осуществления базовая конструкция 210 содержит пленку 212, на которой напечатана РЧ катушка 220. В качестве примера, базовая конструкция 210, показанная на фиг. 4, содержит первую пленку 212 и вторую пленку 212, которые образуют слоистую конструкцию типа "сэндвич" с РЧ катушкой 220, расположенной между ними. Хотя пленка 212 не проиллюстрирована подробно, она содержит на стороне катушки, обращенной к пациенту S по меньшей мере одно отверстие 213, например сетку или тому подобное, которая соединена с источником 231 давления, в частности, через секции 211.
На фиг. 4 показан схематический вид в плане варианта осуществления катушечной конструкции 200 и/или подушки 300, некоторые конструктивные части которых по меньшей мере схожи с конструктивными частями катушечной конструкции 200. Секции 211 расположены на расстоянии друг от друга и выборочно приводятся в действие исполнительным средством 230, которое, например, содержит источник давления 231, соединенный по текучей среде с секциями 211 через трубопроводы 232. Как указано необозначенной линией передачи данных, средство 170, 250 управления может управлять источником 231 давления таким образом, чтобы деформировать вдоль и/или вокруг одной или более осей. Для детектирования текущей деформации базовой конструкции 210 и/или подушки 300 средство 170, 250 управления соединено с одним или более средствами 260 определения деформации, которые проходят вдоль базовой конструкции 210 и/или подушки 300 таким образом, чтобы предоставить сигнал обратной связи в реальном времени, содержащий информацию о текущей форме базовой конструкции 210 и/или подушки 300, средству 170, 250 управления. Средство 260 определения деформации может быть предусмотрено, например, в качестве системы для детектирования и определения динамической формы, положений, температур и напряжения или деформации вдоль участков, секций или длины базовой конструкции 210 и/или подушки 300 с использованием оптических волокон с брэгговскими решетками или тому подобного. Чем больше средств 260 определения деформации распределено по базовой конструкции 210, тем более точное измерение может быть выполнено.
Далее, со ссылкой на фиг. 4, в некоторых вариантах осуществления базовая конструкция 210 и/или подушка 300 дополнительно содержит одно или более средств 270 детектирования давления, которые выполнены с возможностью регистрации давления, оказываемого пациентом на базовую конструкцию 210 и/или подушку 300. Соответственно, средство 170, 250 управления дополнительно выполнено с возможностью приведения в действие исполнительного средства 230 для компенсации зарегистрированного давления, которое может быть индикатором слишком малого расстояния до пациента S. Чем больше средств 270 детектирования давления распределено по базовой конструкции 210, тем более точное измерение может быть выполнено.
На фиг. 5 показан вариант осуществления конструкции 200 и/или подушки 300, в соответствии с которым исполнительное средство 230 содержит вышеупомянутые нитевидные элементы 233, проходящие вдоль базовой конструкции 210 и/или подушки 300. Нитевидные элементы 233 встроены в отдельные секции 211, расположенные на расстоянии друг от друга, и соединены с исполнительным средством 230 через трубопроводы 232, которые в данном контексте можно назвать направляющими. В частности, для передачи энергии между нитевидными элементами 233 и базовой конструкцией 210, нитевидные элементы 233 с базовой конструкцией соединяет, например, шарнир, таким образом, чтобы они находились в зацеплении. Опять же, средство 260 определения деформации может предоставлять сигнал обратной связи в реальном времени о текущей форме, полученной посредством манипулирования нитевидными элементами 233. Как показано на фиг. 5, средство 170, 250 управления соединено с исполнительным средством 230.
На фиг. 6 показана блок-схема способа позиционирования РЧ катушки 220 к пациенту S и/или для управления системой 100 МРТ. Способ может быть осуществлен с использованием вышеуказанной системы 100 МРТ, катушечной конструкции 200 и/или подушки 300. На этапе S1 детектируют текущее положение по меньшей мере части пациента S относительно РЧ катушки 220, в частности, с помощью средства 240 детектирования положения. На одном или более опциональных этапах также может быть детектирована текущая форма катушечной конструкции 200, в частности базовой конструкции 210 и/или радиочастотной катушки 220, чтобы адаптировать форму в режиме реального времени к детектированной форме поверхности пациента S (как показано на фиг. 1, 2 и 3). Аналогично, на одном или более опциональных этапах фидуциальные маркеры (не показаны) могут быть захвачены камерой или тому подобным, температура поверхности пациента S может быть детектирована средством 260 определения деформации или другими подходящими датчиками температуры. На этапе S2 исполнительное средство 230 и, опционально, его вышеупомянутые компоненты, проходящие вдоль базовой конструкции 210, приводятся в действие таким образом, чтобы базовая конструкция 210 деформировалась в ответ на возможно детектированное изменение положения пациента S относительно РЧ катушки 220 между детектированным текущим положением и предыдущим положением. Таким образом, может быть достигнута по меньшей мере частичная компенсация этого изменения положения. В некоторых вариантах осуществления деформация базовой конструкции 210 и/или РЧ катушки 220 выполняется в режиме реального времени для синхронизации с любым движением пациента, таким как дыхание или тому подобное. На одном или более опциональных этапах выполняют вычисление SNR в реальном времени с учетом детектированного текущего положения, формы катушечной конструкции 200 и т.д. Кроме того, на одном или более опциональных этапах может быть определена системная матрица реального времени катушечной конструкции 200. Кроме того, на одном или более опциональных этапах средства 170, 250 управления адаптируют для предоставления сигнала захвата изображения, побуждающего систему МРТ выполнять визуализацию только тогда, когда положение компенсировано.
Следует отметить, что варианты осуществления изобретения описаны со ссылкой на различные объекты изобретения. В частности, некоторые варианты осуществления описаны со ссылкой на пункты формулы изобретения, относящиеся к катушечной конструкции, в то время как другие варианты осуществления описаны со ссылкой на пункты формулы изобретения, относящиеся к системе МРТ. Однако специалист в данной области техники сделает вывод из вышеизложенного и нижеследующего описания, что, если не указано иное, в дополнение к любой комбинации признаков, относящихся к объекту изобретения одного типа, также любая комбинация признаков, относящихся к различным объектам изобретения, считается раскрытой в рамках настоящей заявки. Однако все признаки могут быть скомбинированы, обеспечивая синергетические эффекты, которые являются чем-то большим, чем простое суммирование признаков.
Хотя изобретение было проиллюстрировано и подробно описано на чертежах и приведенном выше описании, такое иллюстрирование и описание должны считаться иллюстративными или приведенными в качестве примера, но не ограничивающими. Изобретение не ограничивается раскрытыми вариантами осуществления. Другие вариации к раскрытым вариантам осуществления могут быть поняты и осуществлены специалистами в данной области при осуществлении заявленного изобретения на основе изучения чертежей, раскрытия и зависимых пунктов формулы изобретения.
В формуле изобретения слово "содержащий" не исключает других элементов или этапов, а использование единственного числа не исключает множественности. Один процессор или другой блок может выполнять функции нескольких элементов, указанных в формуле изобретения. Тот факт, что некоторые меры указаны во взаимно различных зависимых пунктах формулы изобретения, не означает, что комбинация этих мер не может быть использована с выгодой. Любые ссылочные обозначения в формуле изобретения не должны толковаться как ограничивающие объем изобретения.
Список ссылочных обозначений
100 система магнитно-резонансной томографии (система МРТ)
110 корпус
120 туннель
121 внутренняя стенка 130 кушетка
140 главный магнит
150 катушка для всего тела
160 градиентная катушка магнитного поля
170 средство управления
200 катушечная конструкция
210 базовая конструкция
211 секция базовой конструкции
212 пленка базовой конструкции
213 отверстие 220 РЧ катушка
230 исполнительное средство
231 источник давления
232 трубопровод
233 нитевидный элемент
240 средство детектирования положения
250 средство управления
260 средство определения деформации
270 средство детектирования давления
300 элемент давления (например, подушка)
Использование: для магнитно-резонансной томографии. Сущность изобретения заключается в том, что катушечная конструкция для магнитно-резонансной томографии содержит: базовую конструкцию, имеющую изменяемую форму; радиочастотную (РЧ) катушку, расположенную на базовой конструкции или в ней; исполнительное средство, по меньшей мере частично проходящее вдоль базовой конструкции таким образом, что базовая конструкция может деформироваться вдоль и/или вокруг по меньшей мере одной оси; средство детектирования положения, выполненное с возможностью детектирования текущего положения по меньшей мере части обследуемого пациента относительно радиочастотной катушки; средство управления, соединенное со средством детектирования положения и исполнительным средством, при этом средство управления выполнено с возможностью регулирования формы базовой конструкции для поддержания контакта внешней поверхности базовой конструкции и/или радиочастотной катушки по меньшей мере с частью пациента путем приведения в действие исполнительного средства в ответ на детектированное изменение текущего положения относительно предыдущего положения по меньшей мере части пациента. Технический результат: улучшение качества изображения магнитно-резонансной томографии (МРТ). 4 н. и 11 з.п. ф-лы, 6 ил.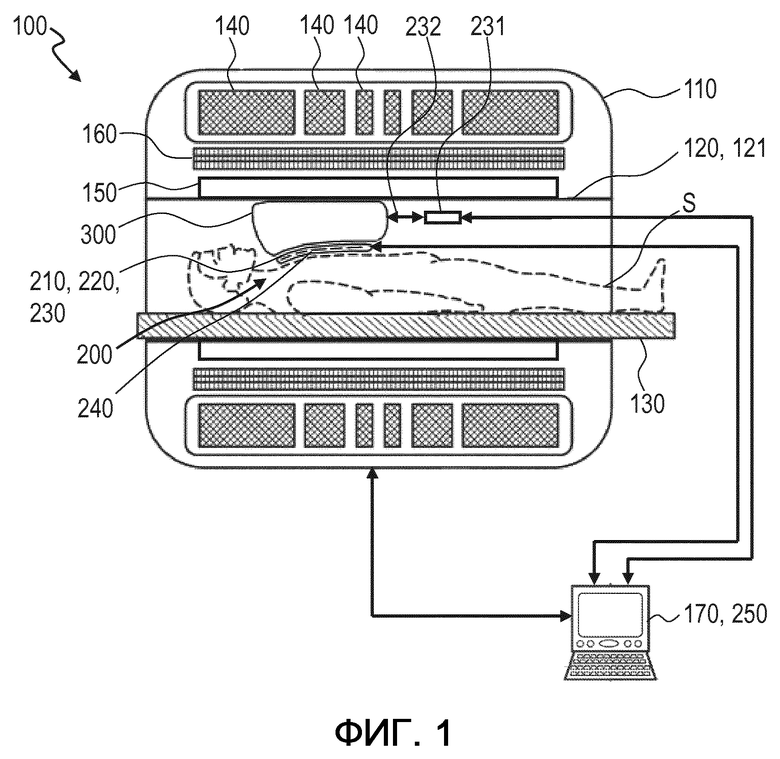
1. Катушечная конструкция (200) для магнитно-резонансной томографии, содержащая:
- базовую конструкцию (210), имеющую изменяемую форму,
- радиочастотную (РЧ) катушку (220), расположенную на базовой конструкции или в ней,
- исполнительное средство (230), по меньшей мере частично проходящее вдоль базовой конструкции таким образом, что базовая конструкция может деформироваться вдоль и/или вокруг по меньшей мере одной оси,
- средство (240) детектирования положения, выполненное с возможностью детектирования текущего положения по меньшей мере части обследуемого пациента относительно радиочастотной катушки, и
- средство (250) управления, соединенное со средством детектирования положения и исполнительным средством,
при этом средство (250) управления выполнено с возможностью регулирования формы базовой конструкции для поддержания контакта внешней поверхности базовой конструкции (210) и/или радиочастотной катушки (220) по меньшей мере с частью пациента путем приведения в действие исполнительного средства (230) в ответ на детектированное изменение текущего положения относительно предыдущего положения по меньшей мере части пациента.
2. Катушечная конструкция по п. 1, в которой исполнительное средство (230) расположено на стороне катушки, обращенной в сторону от пациента (S).
3. Катушечная конструкция по п. 1 или 2, в которой исполнительное средство (230) содержит один или более трубопроводов, соединенных со средством (250) управления и выполненных с возможностью управления ими посредством указанного средства (250) управления.
4. Катушечная конструкция по п. 3, в которой по меньшей мере два трубопровода открываются в расположенные на расстоянии друг от друга секции базовой конструкции (210) и являются выборочно управляемыми.
5. Катушечная конструкция по п. 3 или 4, в которой в трубопроводе проходит нитевидный элемент (233), находящийся в зацеплении с базовой конструкцией (210).
6. Катушечная конструкция по п. 3 или 4, в которой по меньшей мере один трубопровод соединен на одном конце с источником (233) давления, а на другом конце открывается по текучей среде к подушке (300), имеющей изменяемую форму.
7. Катушечная конструкция по любому из предыдущих пунктов, в которой средство (240) детектирования положения выполнено с возможностью управления им с частотой взятия отсчетов, позволяющей детектировать смещение органа пациента и, в соответствии с этим, управлять исполнительным средством.
8. Катушечная конструкция по любому из предыдущих пунктов, в которой средство (240) детектирования положения содержит один или более датчиков расстояния, выполненных с возможностью предоставления информации о расстоянии между поверхностью пациента и катушкой.
9. Катушечная конструкция по любому из предыдущих пунктов, в которой средство (250) управления дополнительно соединено со средством (260) определения деформации, выполненным с возможностью предоставления информации о текущей деформации по меньшей мере базовой конструкции (210).
10. Катушечная конструкция по любому из предыдущих пунктов, в которой базовая конструкция (210) дополнительно содержит средство (270) детектирования давления, выполненное с возможностью регистрации давления, оказываемого пациентом на базовую конструкцию,
при этом средство (250) управления дополнительно выполнено с возможностью приведения в действие исполнительного средства для компенсации зарегистрированного давления.
11. Катушечная конструкция по любому из предыдущих пунктов, в которой средство (250) управления дополнительно соединено с системой магнитно-резонансной томографии и выполнено с возможностью предоставления сигнала захвата изображения, побуждающего указанную систему томографии выполнять визуализацию только тогда, когда положение компенсировано.
12. Катушечная конструкция по п. 11, в которой базовая конструкция (210) содержит первую пленку и вторую пленку, которые образуют слоистую конструкцию типа "сэндвич" с катушкой, расположенной между ними,
при этом пленка содержит на стороне катушки, обращенной к пациенту, по меньшей мере одно отверстие, открывающееся по текучей среде к источнику давления.
13. Система магнитно-резонансной томографии, содержащая:
- туннель (120),
- кушетку (130) для поддержки обследуемого пациента, выполненную с возможностью выборочного перемещения в туннель, и
- катушечную конструкцию (200) по любому из предыдущих пунктов.
14. Способ позиционирования радиочастотной (РЧ) катушки (220) для системы (100) магнитно-резонансной томографии относительно обследуемого пациента (S), включающий:
- детектирование текущего положения по меньшей мере части пациента (S) относительно радиочастотной катушки (220), и
- регулировку формы базовой конструкции для поддержания контакта внешней поверхности базовой конструкции (210) и/или радиочастотной катушки (220) по меньшей мере с частью пациента путем приведения в действие исполнительного средства (230), проходящего вдоль базовой конструкции (210), в которой или на которой расположена радиочастотная катушка, таким образом, чтобы базовая конструкция (2210) могла деформироваться вдоль и/или вокруг по меньшей мере одной оси в ответ на детектированное изменение положения пациента относительно катушки между детектированным текущим положением и предыдущим положением пациента.
15. Долговременный машиночитаемый носитель, содержащий сохраненные на нем последовательности инструкций, причем последовательности инструкций включают в себя инструкции, которые, при исполнении компьютерной системой (170, 250), побуждают компьютер выполнять способ по п. 14.
| US 2015293188 A1, 15.10.2015 | |||
| US 2010036237 A1, 11.02.2010 | |||
| WO 2006095297 A1, 14.09.200 | |||
| WO 2009134920 A2, 05.11.2009 | |||
| АНТЕННАЯ СИСТЕМА ДЛЯ АППАРАТОВ МАГНИТНО-РЕЗОНАНСНОГО ИЗОБРАЖЕНИЯ И ЯДЕРНО-МАГНИТНО-РЕЗОНАНСНЫХ АППАРАТОВ | 1997 |
|
RU2172004C2 |

