Изобретение относится к электротехнике, а именно, к релейной защите и автоматике.
Известен способ выявления асинхронного режима, реализованный в системе выявления качаний и асинхронного режима в электрической сети (Patent № 7930117 United States, Int. Cl. G01R 19/00 (2006.01). Systems and methods for power swing and out-of-step detection using time stamped data : № 2009/0089608 A1: filed 02.04.2009 : publication Data 19.04.2011 / Armando Guzman-Casillas, Pullman WA (US); assignee Schweitzer Engineering Laboratories, Inc., Pullman, WA (US). – 28 p. : fig.). Способ фиксирует асинхронный режим и выявляет электрический центр качаний на контролируемом участке по углу между векторами напряжений по концам контролируемого участка. При этом векторы напряжений формируются непосредственно по измерениям устройств, установленных на концах контролируемого участка.
Для работы способа необходима синхронизация и связь между устройствами. Поэтому способ имеет невысокую надежность, поскольку при отказе аппаратуры связи между устройствами способ теряет работоспособность.
От этого недостатка свободен способ автоматической ликвидации асинхронного режима электрической сети, реализованный в устройстве АЛАР-М (Руководство по эксплуатации устройства автоматики ликвидации асинхронного режима «АЛАР-М» КДРН.402252.002 РЭ Версия 04.05. ОАО «Институт «Энергосетьпроект», ООО «Энергоизмеритель», г. Москва, 2010. С. 13 – 16). Способ полагает, что возник асинхронный режим, и электрический центр качаний находится на контролируемом участке, если угол между векторами напряжений по концам контролируемого участка достиг уставки. При этом способ использует измерения электрических величин только на месте установки устройства и вектор напряжения в конце контролируемого участка определяет на основе модели линии.
Способ не может в текущем режиме определить критический угол, при котором электрическая система теряет устойчивость. Кроме того, способ не имеет возможности прогнозировать возникновение электрического центра качаний на контролируемом участке.
От этого недостатка свободен способ выявления асинхронного режима (Патент № 2199807 Российская Федерация, МПК Н02Н 3/24 (2000.01) Способ выявления асинхронного режима : № 2000114402/09 : заявл. 05.06.2000: опубликовано 27.02.2003 / Эдлин М.А., Кац П.Я., Струков А.В. ; заявитель ОАО «Научно-исследовательский институт по передаче электроэнергии постоянным током высокого напряжения». – 6 с. : ил.). Способ так же, как и предыдущие аналоги, анализирует угол между векторами напряжения по концам контролируемого участка. В способе полагают, что в энергосистеме имеет место асинхронный режим, если знак скорости изменения активной мощности противоположен знакам скорости и ускорения угла между векторами напряжений по концам контролируемого участка. Принимают, что электрический центр качаний находится в пределах контролируемого участка, если он содержит в себе точку минимального напряжения.
Способ определяет момент наступления асинхронного режима косвенно, поскольку судит о наступлении асинхронного режима не по углу между эквивалентными ЭДС двухмашинной схемы замещения. Это свойство создает вероятность ложного срабатывания способа в некоторых режимах работы электрической сети, например, в режиме глубоких качаний.
Наиболее близким по технической сущности и достигаемому результату к предлагаемому способу является способ (Патент № 2204877 Российская Федерация, МПК H02H 3/48 (2000.01). Способ выявления и ликвидации асинхронного режима в электроэнергетической системе устройством автоматики : № 2001126970/09 : заявл. 08.10.2001 : опубликовано 20.05.2003 / Якимец И.В., Наровлянский В.Г., Налевин А.А., Ваганов А.Б. ; заявитель ОАО «Проектно-изыскательский и научно-исследовательский институт по проектированию энергетических систем и электрических сетей «Энергосетьпроект». – 10 с. : ил.). Способ в отличии от аналогов выявляет асинхронный режим электрической сети на основе оценки угла между комплексными сигналами ЭДС эквивалентных источников двухмашинной схемы замещения энергосистемы.
Как и во всех упомянутых выше способах, фазные токи и напряжения в месте измерения преобразуют фильтрами симметричных составляющих в комплексные сигналы тока и напряжения прямой последовательности, которые в свою очередь преобразуют моделью контролируемого участка линии в одноименные комплексные сигналы в конце контролируемого участка. При этом все вычисления электрических величин в способе производят на средней частоте составляющих электрических величин асинхронного режима, в то время как параметры самой модели контролируемого участка представлены на номинальной частоте. Это приводит к увеличению погрешности способа.
Этот способ принят в качестве прототипа.
Техническим результатом, достигаемым предлагаемым способом, является повышение точности выявления асинхронного режима и электрического центра качаний электрической сети.
Поставленная цель достигается тем, что в известном способе выявления асинхронного режима электрической сети, согласно которому фазные токи и напряжения в месте измерения преобразуют фильтрами симметричных составляющих в комплексные сигналы тока и напряжения прямой последовательности, которые в свою очередь преобразуют моделью контролируемого участка линии в одноименные комплексные сигналы в конце контролируемого участка, оценивают угол между комплексными сигналами ЭДС эквивалентных источников двухмашинной схемы замещения энергосистемы, фиксируют асинхронный режим при достижении упомянутым углом заданного значения, выявляют избыточную и дефицитную части энергосистем в асинхронном режиме, определяют место электрического центра качаний и, если он находится на контролируемом участке, формируют сигнал срабатывания, вводят новые операции. Их суть заключается в следующем. На основе фазных электрических величин в месте измерения формируют вспомогательный сигнал, определяют частоты его компонентов, близкие к промышленной. Из фазных электрических величин в месте измерения выделяют составляющие упомянутых частот и преобразуют их в комплексные сигналы тока и напряжения прямой последовательности упомянутых частот в месте измерения. Затем с помощью модели контролируемого участка с учетом частот сигналов их преобразуют в одноименные комплексные сигналы в конце контролируемого участка. Определяют отношения модулей комплексных сигналов напряжения прямой последовательности упомянутых частот в месте измерения и одноименных комплексных сигналов в конце контролируемого участка и, если одно из них больше, а другое меньше единицы, то полагают, что электрический центр качаний находится на контролируемом участке. Формируют результирующие комплексные сигналы напряжения в месте измерения и в конце контролируемого участка как суммы комплексных сигналов напряжения прямой последовательности упомянутых частот в месте измерения и в конце контролируемого участка соответственно. Определяют разность фаз результирующего комплексного сигнала напряжения в месте измерения и одноименного сигнала в конце контролируемого участка. Определяют избыточную и дефицитную части электрической системы – при условии нахождения электрического центра качаний на контролируемом участке – путем определения знака приращения величины упомянутой разности фаз. При этом, если знак этого приращения положительный, то энергосистему «за спиной» двухмашинной схемы замещения относят к ее избыточной части и полагают, что она движется с частотой, большей из упомянутых частот, и энергосистему с противоположной стороны относят к дефицитной части и полагают что, она движется с меньшей из упомянутых частот. Если знак приращения отрицательный, то полагают обратное. Комплексное сопротивление каждого из источников двухмашинной схемы замещения энергосистемы определяют на частоте источника по падению напряжения на нем от тока источника противоположного конца. В двухмашинной схеме замещения энергосистемы определяют комплексный сигнал ЭДС источника «за спиной» как сумму напряжения на зажимах сопротивления источника и комплексного сигнала напряжения прямой последовательности в месте измерения на частоте источника и аналогично сигнал ЭДС источника противоположного конца – как сумму напряжения на зажимах сопротивления источника и комплексного сигнала напряжения прямой последовательности в конце контролируемого участка.
В следующей реализации способа в качестве вспомогательного сигнала принимают одно из фазных напряжений.
В третьей реализации способа в качестве вспомогательного сигнала принимают один из фазных токов.
В четвертой реализации способа в качестве вспомогательного сигнала принимают совокупность фазных напряжений и токов.
В пятой реализации фиксируют асинхронный режим, если сдвиг фаз ЭДС источников двухмашинной схемы замещения превышает 90 градусов и происходит изменение знака скорости изменения скольжения, причем скольжение источников напряжения двухмашинной схемы замещения энергосистемы определяют как разность частот источника «за спиной» и источника противоположной стороны.
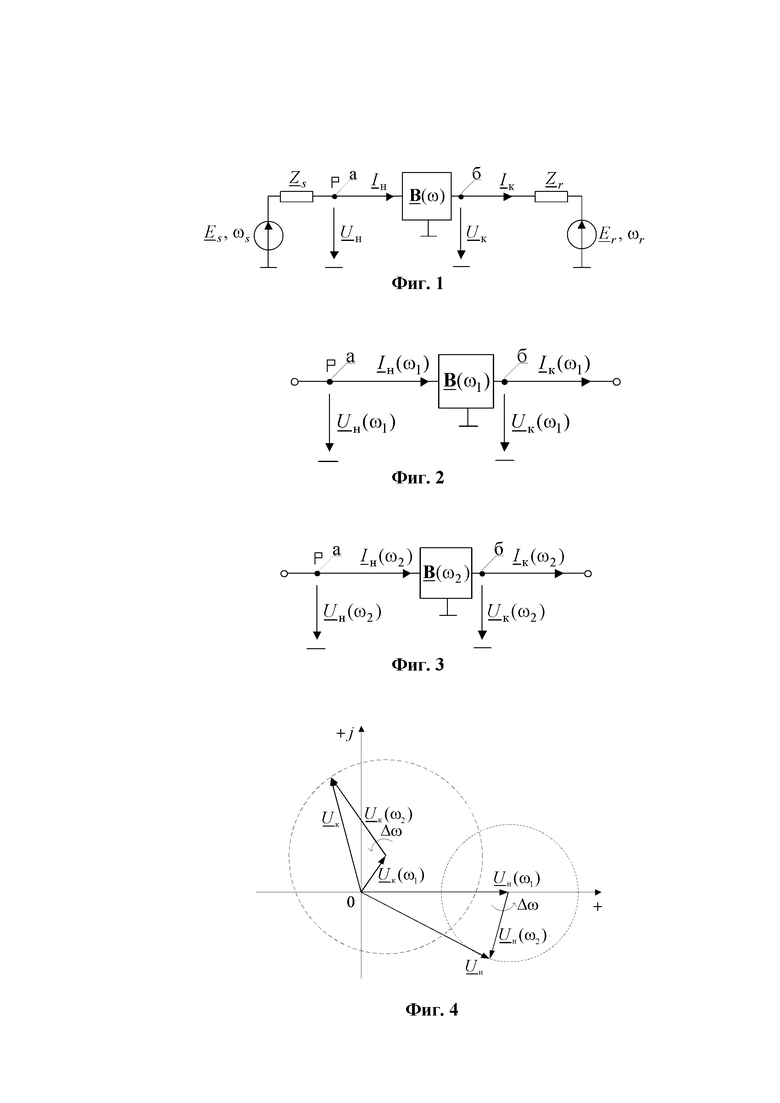
На фиг. 1 представлена двухмашинная схема замещения электропередачи. Она включает в себя эквивалентные источники ЭДС передающей (источник «за спиной») и принимающей (источник с противоположной стороны) частей энергосистемы  и
и  с внутренними сопротивлениями
с внутренними сопротивлениями  и
и  ; модель контролируемого участка представлена четырехполюсником
; модель контролируемого участка представлена четырехполюсником  . Флажком обозначено место установки устройства, реализующего предлагаемый способ. Устройство измеряет напряжение
. Флажком обозначено место установки устройства, реализующего предлагаемый способ. Устройство измеряет напряжение  и ток
и ток  в начале контролируемого участка (точка «а» на электропередаче). Эквивалентные ЭДС
в начале контролируемого участка (точка «а» на электропередаче). Эквивалентные ЭДС  и , а также их частоты
и , а также их частоты  и
и  и внутренние сопротивления и неизвестны и подлежат определению.
и внутренние сопротивления и неизвестны и подлежат определению.
На фиг. 2 и 3 представлены модели контролируемого участка на частоте  и
и  . Каждая из моделей контролируемого участка представлена соответствующим четырехполюсником с матрицей комплексных коэффициентов
. Каждая из моделей контролируемого участка представлена соответствующим четырехполюсником с матрицей комплексных коэффициентов  или
или  . Она предназначена для преобразования комплексных сигналов прямой последовательности в месте измерения (в точке «а») в соответствующие комплексные сигналы в конце контролируемого участка (в точке «б» на фиг. 2 и 3).
. Она предназначена для преобразования комплексных сигналов прямой последовательности в месте измерения (в точке «а») в соответствующие комплексные сигналы в конце контролируемого участка (в точке «б» на фиг. 2 и 3).
На фиг. 4 показаны годографы векторов напряжений в месте измерения  (в точке «а») и в конце контролируемого участка
(в точке «а») и в конце контролируемого участка  (в точке «б») в асинхронном режиме с электрическим центром качаний внутри контролируемого участка.
(в точке «б») в асинхронном режиме с электрическим центром качаний внутри контролируемого участка.
На фиг. 5 и 6 представлены схемы замещения электропередачи при действии источников и в отдельности.
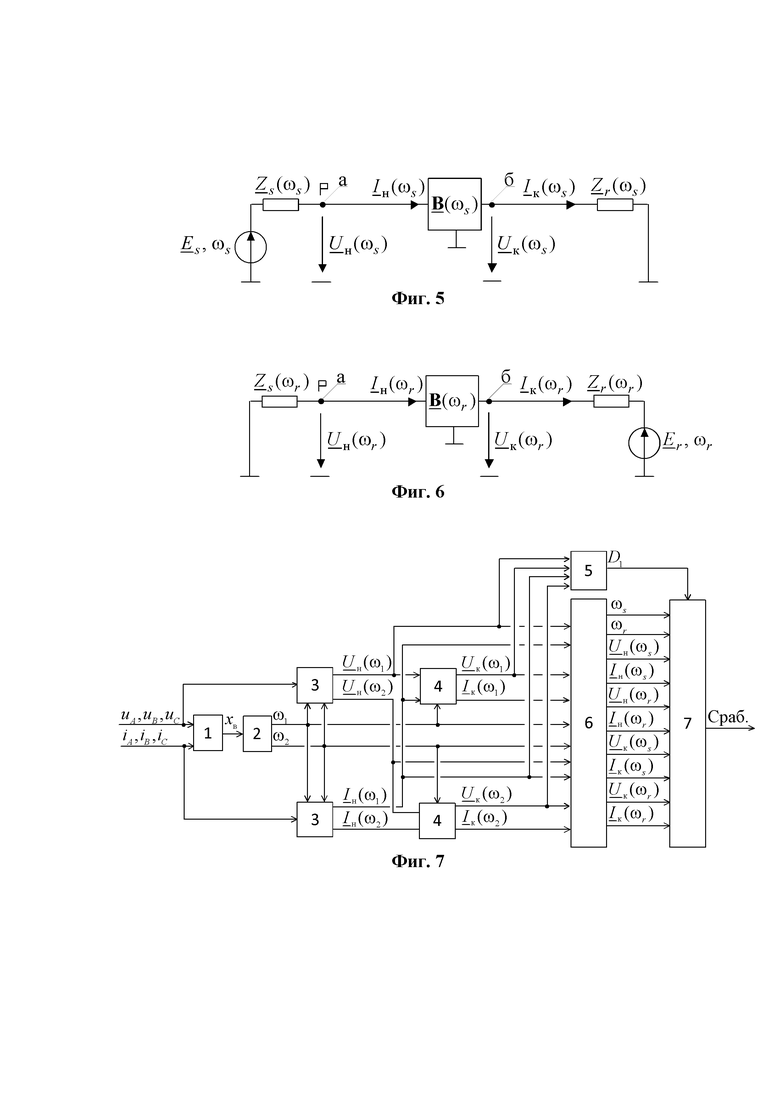
На фиг. 7 представлена структурная схема, реализующая способ автоматической ликвидации асинхронного режима электрической сети. Схема включает в себя блок формирования вспомогательного сигнала 1; блок определения частот составляющих сигнала асинхронного режима 2; блок преобразования измеренных электрических величин в комплексные сигналы прямой последовательности 3; модель контролируемого участка 4; блок определения места электрического центра качаний 5; блок определения дефицитной и избыточной частей энергосистемы 6 и блок выявления момента потери устойчивости электрической сети 7.
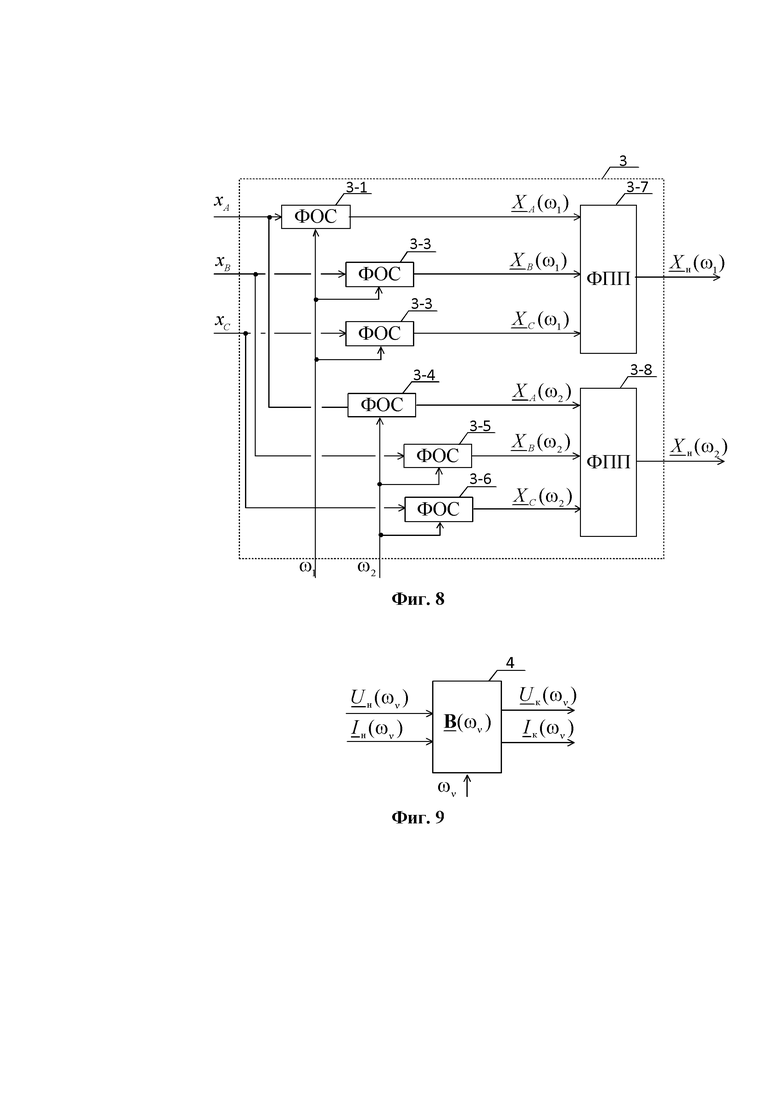
На фиг. 8 приведена структурная схема блока преобразования измеренных электрических величин в комплексные сигналы прямой последовательности 3. Схема включает в себя фильтры ортогональных составляющих (ФОС) 3-1 – 3-6; фильтры прямой последовательности (ФПП) 3-7 и 3-8. Блок преобразует входные трехфазные электрические величины  (
( – обозначение фазы) в комплексные сигналы прямой последовательности
– обозначение фазы) в комплексные сигналы прямой последовательности  и
и  их компонентов частот
их компонентов частот  и
и  .
.
На фиг. 9 приведена структурная схема модели контролируемого участка 4. Модель контролируемого участка на частоте  представлена матрицей комплексных коэффициентов
представлена матрицей комплексных коэффициентов  . Она предназначена для преобразования комплексных сигналов прямой последовательности в месте измерения (в точке «а» на фиг. 2 и 3) в соответствующие комплексные сигналы в конце контролируемого участка (в точке «б» на фиг. 2 и 3).
. Она предназначена для преобразования комплексных сигналов прямой последовательности в месте измерения (в точке «а» на фиг. 2 и 3) в соответствующие комплексные сигналы в конце контролируемого участка (в точке «б» на фиг. 2 и 3).
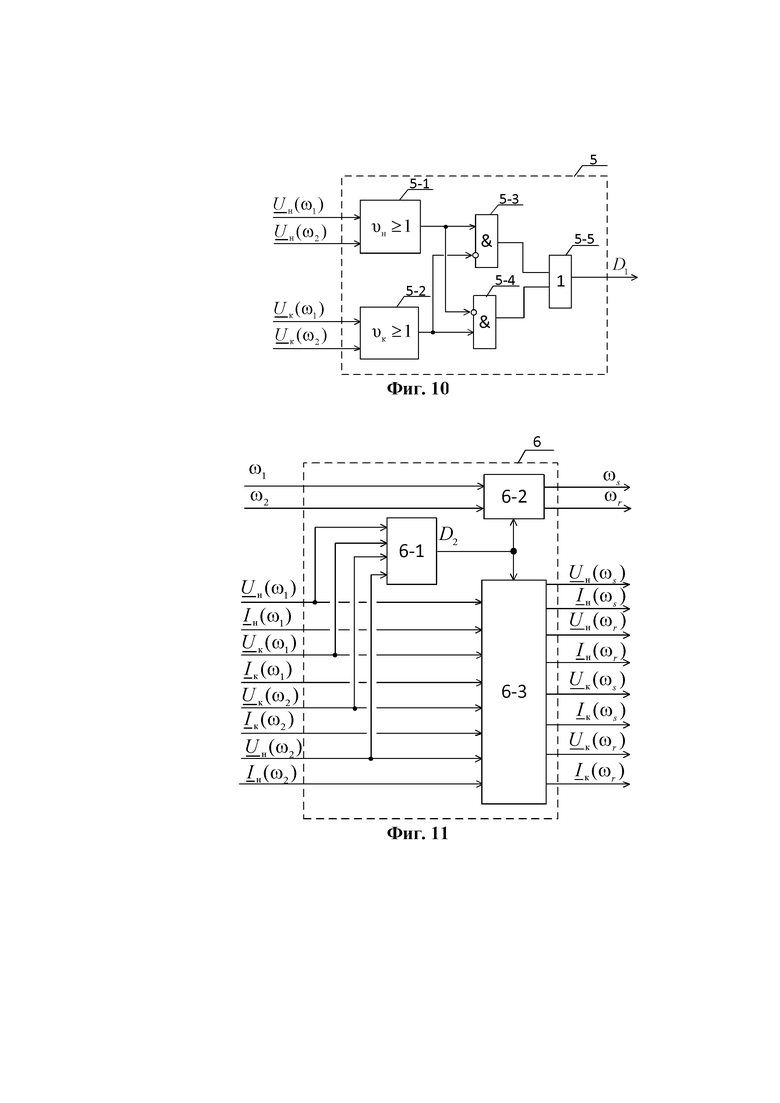
На фиг. 10 приведена структурная схема блока определения места электрического центра качаний 5. Схема включает в себя пороговые органы 5-1 и 5-2; элементы логического умножения 5-3 и 5-4 и логического сложения 5-5.
На фиг. 11 приведена структурная схема блока определения дефицитной и избыточной частей энергосистемы 6. Схема включает в себя блок определения знака приращения угла 6-1 между результирующими векторами напряжений в месте измерения  и в конце контролируемого участка ; логический дискриминатор частоты 6-2 источника «за спиной»
и в конце контролируемого участка ; логический дискриминатор частоты 6-2 источника «за спиной»  и источника с противоположной стороны
и источника с противоположной стороны  ; блок классификации сигналов 6-3, предназначенный для разделения входных комплексных сигналов частот
; блок классификации сигналов 6-3, предназначенный для разделения входных комплексных сигналов частот  и
и  на группы сигналов, связанных с источником «за спиной» и с источником с противоположной стороны.
на группы сигналов, связанных с источником «за спиной» и с источником с противоположной стороны.
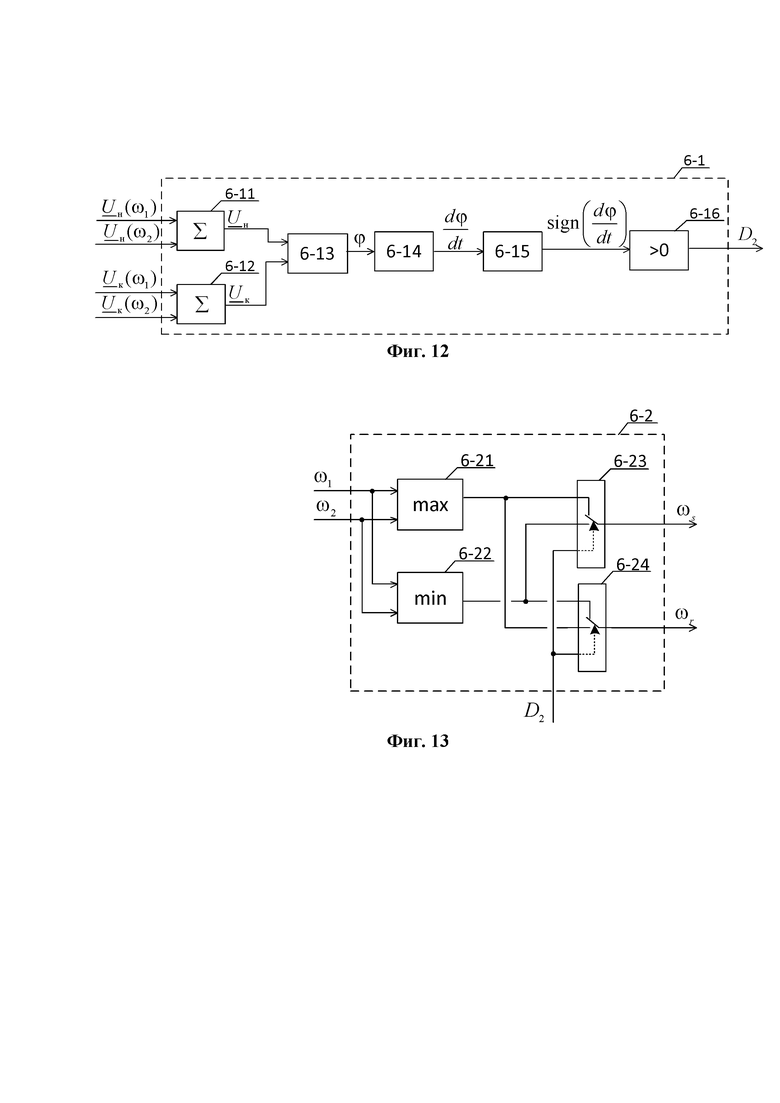
На фиг. 12 приведена структурная схема блока определения знака приращения угла 6-1 между результирующими векторами напряжений в месте измерения и в конце контролируемого участка. Схема включает в себя сумматоры 6-11 и 6-12; блок определения разности фаз между комплексными сигналами 6-13; блок приращения разности фаз 6-14; определитель знака (нуль-индикатор) 6-15 и пороговый орган 6-16.
На фиг. 13 приведена структурная схема логического дискриминатора частоты 6-2. Его предназначение состоит в установлении соответствия частот  и
и  компонентов измеряемых величин частотам источника «за спиной»
компонентов измеряемых величин частотам источника «за спиной»  и источника с противоположной стороны
и источника с противоположной стороны  . Схема логического дискриминатора состоит из максиселектора 6-21, миниселектора 6-22, переключателей 6-23 и 6-24, управляемых логическим сигналом
. Схема логического дискриминатора состоит из максиселектора 6-21, миниселектора 6-22, переключателей 6-23 и 6-24, управляемых логическим сигналом  от блока определения знака приращения угла 6-1.
от блока определения знака приращения угла 6-1.
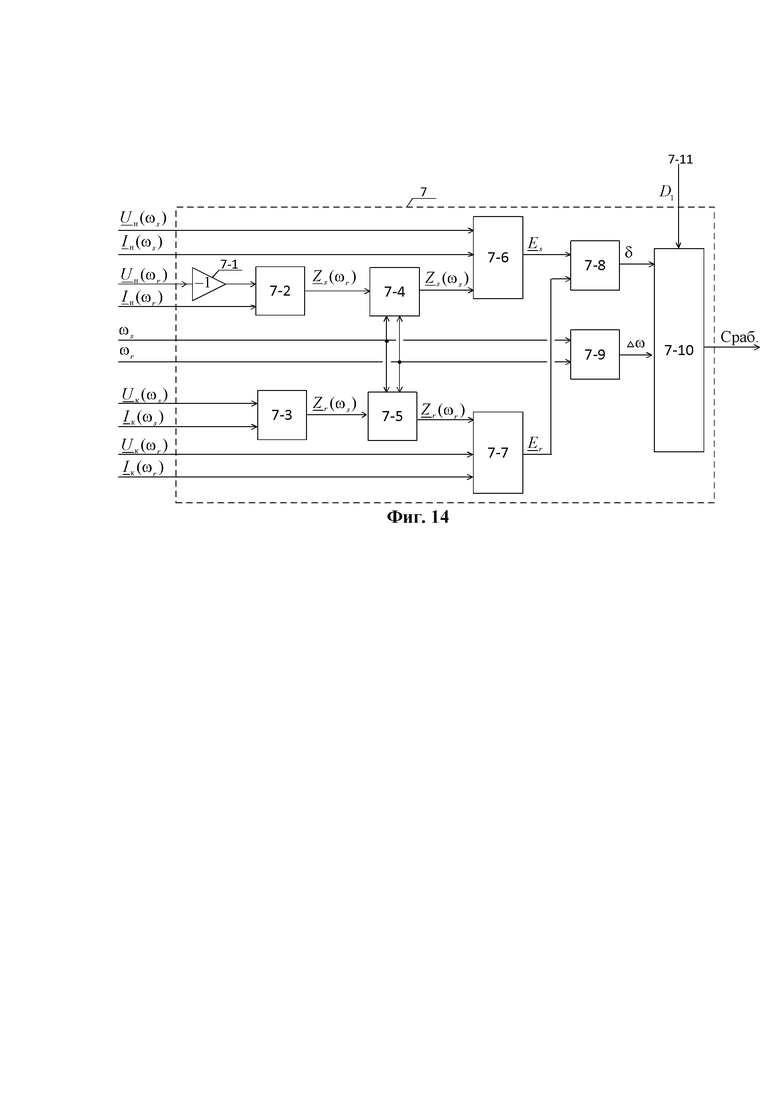
На фиг. 14 приведена структурная схема блока выявления момента потери устойчивости электрической сети 7. Схема включает в себя усилитель 7-1 с коэффициентом усиления –1; блоки определения комплексного сопротивления 7-2 и 7-3 источника «за спиной» на частоте ωr и источника с противоположной стороны на частоте  ; блоки пересчета комплексного сопротивления 7-4 и 7-5 на частоте
; блоки пересчета комплексного сопротивления 7-4 и 7-5 на частоте  ; блок определения ЭДС 7-6 и 7-7 источника «за спиной» и источника с противоположной стороны; блок определения угла передачи 7-8; блок определения частоты скольжения 7-9; блок определения момента потери устойчивости электрической сети 7-10; разрешающий вход 7-11.
; блок определения ЭДС 7-6 и 7-7 источника «за спиной» и источника с противоположной стороны; блок определения угла передачи 7-8; блок определения частоты скольжения 7-9; блок определения момента потери устойчивости электрической сети 7-10; разрешающий вход 7-11.
Поясним идею предлагаемого способа на примере двухчастотного асинхронного режима электрической сети, представленной на фиг. 1. В асинхронном режиме частоты источников «за спиной»  и с противоположной стороны
и с противоположной стороны  не совпадают. Поэтому электрические величины асинхронного режима в каждой точке электрической сети содержат две составляющие различных частот. Именно использование электрических величин разных частот асинхронного режима позволяет способу прогнозировать расположение электрического центра качания на контролируемом участке еще до того момента, когда формируются условия для его возникновения. Наряду с этим, знание частот составляющих измеренных электрических величин позволяет использовать модели электрической сети при действии каждой составляющей электрической величины в отдельности.
не совпадают. Поэтому электрические величины асинхронного режима в каждой точке электрической сети содержат две составляющие различных частот. Именно использование электрических величин разных частот асинхронного режима позволяет способу прогнозировать расположение электрического центра качания на контролируемом участке еще до того момента, когда формируются условия для его возникновения. Наряду с этим, знание частот составляющих измеренных электрических величин позволяет использовать модели электрической сети при действии каждой составляющей электрической величины в отдельности.
Поскольку при декомпозиции измеренной электрической величины на составляющие их принадлежность к реакции электрической системы на тот или иной источник установить невозможно, то обозначим предварительно частоты составляющих как  и
и  (фиг. 2 и 3). Тогда результирующие векторы напряжений в месте измерения
(фиг. 2 и 3). Тогда результирующие векторы напряжений в месте измерения  и в конце контролируемого участка определяются как совокупность соответствующих комплексных сигналов частот
и в конце контролируемого участка определяются как совокупность соответствующих комплексных сигналов частот  и
и  :
:
 (1)
(1)
и
 (2)
(2)
Как известно, ликвидация асинхронного режима в энергосистеме выполняется путем отключения связи между дефицитной и избыточной частями электрической системы. Селективность деления электрической сети обеспечивается отключением только той связи, на которой располагается электрический центр качаний. Это свойство способа достигается за счет прогнозирования возникновения электрического центра качаний на контролируемом участке.
Классические способы выявления асинхронного режима определяют положение электрического центра качаний по факту достижения углом между векторами напряжений по концам контролируемого участка 180 градусов, т.е. они в принципе не имеют возможности предсказывать возникновение электрического центра качаний на контролируемом участке.
Поясним способность предлагаемого изобретения прогнозировать возникновение электрического центра качаний на контролируемом участке.
Для этого способ использует оценки отношения модулей комплексных сигналов составляющих напряжения в месте измерения  и такого же отношения составляющих напряжений в конце контролируемого участка
и такого же отношения составляющих напряжений в конце контролируемого участка  . Электрический центр качаний находится внутри участка, если одно из этих отношений больше единицы, а другое – меньше, т.е. должны выполняться следующие условия:
. Электрический центр качаний находится внутри участка, если одно из этих отношений больше единицы, а другое – меньше, т.е. должны выполняться следующие условия:
либо
 и
и  , (3)
, (3)
либо
 и
и  . (4)
. (4)
При  электрический центр качаний возникает в месте измерения, а при
электрический центр качаний возникает в месте измерения, а при  – в конце контролируемого участка. Предлагаемый подход позволяет прогнозировать возникновение электрического центра качаний на контролируемом участке и выдать сигнал на разрыв связи заранее в менее тяжелых условиях для работы электрической системы.
– в конце контролируемого участка. Предлагаемый подход позволяет прогнозировать возникновение электрического центра качаний на контролируемом участке и выдать сигнал на разрыв связи заранее в менее тяжелых условиях для работы электрической системы.
Пример предсказания электрического центра качаний на контролируемом участке предлагаемым способом по условию (3) иллюстрируется фиг. 4. Движение всех векторов указано относительно векторов частоты  , поэтому векторы составляющих частоты
, поэтому векторы составляющих частоты  фиксированы во времени. Тогда векторы составляющих частоты
фиксированы во времени. Тогда векторы составляющих частоты  проскальзывают с частотой скольжения
проскальзывают с частотой скольжения  относительно векторов с
относительно векторов с  :
:
 (5)
(5)
и
 (6)
(6)
где k – текущий отсчет,
 – период дискретизации сигналов.
– период дискретизации сигналов.
Годографы напряжений (5) и (6) представляют собой окружности, положение центров которых определяются векторами напряжений частоты  , а величины радиусов – модулями векторов напряжения частоты
, а величины радиусов – модулями векторов напряжения частоты  . На фиг. 4, годограф результирующего вектора напряжения в конце контролируемого участка охватывает, а годограф результирующего вектора напряжения в месте измерения не охватывает начало координат. Эта картина полностью соответствует условию (3).
. На фиг. 4, годограф результирующего вектора напряжения в конце контролируемого участка охватывает, а годограф результирующего вектора напряжения в месте измерения не охватывает начало координат. Эта картина полностью соответствует условию (3).
Еще одной особенностью предлагаемого способа является возможность выявления избыточной и дефицитной частей электрической сети еще в начале асинхронного режима благодаря прогнозированию места расположения электрического центра качаний на контролируемом участке. Это свойство способа основано на общеизвестном характере изменения разности фаз между результирующими комплексными сигналами напряжений и в цикле асинхронного режима. Известно, что если электрический центр качаний находится на контролируемом участке, то знак приращения упомянутой разности фаз не меняется (абсолютное значение разности фаз постоянно растет), в то время, как при электрическом центре качаний за пределами контролируемого участка приращение разности фаз разнополярно (разность фаз колеблется в диапазоне от минус 90 до плюс 90 градусов).
При электрическом центре качаний на контролируемом участке и положительном приращении разности фаз избыточная часть энергосистемы находится «за спиной», а если знак приращения разности фаз имеет отрицательный характер, то справедливо обратное. Тогда избыточная часть энергосистемы движется с частотой, наибольшей из упомянутых частот, а дефицитная часть движется с частотой, меньшей из упомянутых частот.
Знание частот источников двухмашинной схемы замещения позволяет рассматривать электрическую схему при действии каждого из источников отдельно (фиг. 5 и 6). Это упрощает определение неизвестных параметров электрической схемы: эквивалентных ЭДС и , а также их внутренние сопротивления и , угла передачи  (угла между ЭДС и ).
(угла между ЭДС и ).
С целью ликвидации асинхронного режима электрической сети еще до возникновения электрического центра качаний на контролируемом участке – т.е. до достижения углом передачи 180 градусов, которое сопровождается значительным ростом тока и снижением напряжения на контролируемом участке – способ отключает контролируемый участок при достижении углом передачи уже критического значения. Способ использует достижение угла критического значения как гарантию правильного деления электрической сети, поскольку после критического угла система необратимо теряет устойчивость.
Момент преодоления углом передачи  критического значения предлагаемый способ фиксирует по моменту смены знака скорости изменения скольжения
критического значения предлагаемый способ фиксирует по моменту смены знака скорости изменения скольжения  при углах передачи, большем 90 градусов. Скольжение определяется как разность частот источника «за спиной» и источника противоположной стороны:
при углах передачи, большем 90 градусов. Скольжение определяется как разность частот источника «за спиной» и источника противоположной стороны:
 . (7)
. (7)
Рассмотрим работу предлагаемого способа на основе структурной схемы, приведенной на фиг. 7. Техническое совершенство предлагаемого способа достигается в результате выполнения следующих операций:
1. Сначала фазные напряжения  и фазные токи
и фазные токи 
 в месте измерения преобразуют во вспомогательный сигнал
в месте измерения преобразуют во вспомогательный сигнал  блоком 1 (фиг. 7).
блоком 1 (фиг. 7).
В общем случае вспомогательный сигнал формируется как линейная комбинация какого-либо напряжения  и тока
и тока  фазы
фазы  в месте установки устройства:
в месте установки устройства:
 ,
,
где  – весовые коэффициенты.
– весовые коэффициенты.
В частном случае в качестве вспомогательного сигнала принимают одно из фазных напряжений или один из фазных токов в месте установки устройства. Например, если место установки близко к источнику бесконечной мощности (сопротивление источника равно нулю), то измеряемое напряжение полностью определяется источником и не содержит составляющих, вызванных действием источника с противоположного конца. В этом случае в качестве вспомогательного сигнала рекомендуется принимать один из фазных токов как сигнал, содержащий составляющие обеих частот асинхронного режима  и
и  . В случае высокой вероятности возникновения электрического центра качаний вблизи места установки устройства также лучше использовать одно из фазных напряжений.
. В случае высокой вероятности возникновения электрического центра качаний вблизи места установки устройства также лучше использовать одно из фазных напряжений.
Затем на основе вспомогательного сигнала в блоке 2 (фиг. 7) определяют частоты составляющих сигнала асинхронного режима  и
и  .
.
2. Блоком 3 (фиг. 7) фазные напряжения  и токи
и токи  в месте измерения преобразуют в комплексные сигналы напряжения
в месте измерения преобразуют в комплексные сигналы напряжения  ,
,  и тока
и тока  ,
,  прямой последовательности частот
прямой последовательности частот  и
и  .
.
Для этого сначала из фазной электрической величины  формируют комплексный сигнал составляющей асинхронного режима частоты
формируют комплексный сигнал составляющей асинхронного режима частоты  ,
,  например, адаптивным фильтром ортогональных составляющих (ФОС блоки 3-1 – 3-3 для частоты
например, адаптивным фильтром ортогональных составляющих (ФОС блоки 3-1 – 3-3 для частоты  и блоки 3-4 – 3-6 для частоты
и блоки 3-4 – 3-6 для частоты  фиг. 8) [Антонов, В. И. Адаптивный структурный анализ электрических сигналов: теория и ее приложения в интеллектуальной электроэнергетике / В. И. Антонов. – Чебоксары : Чувашский государственный университет имени И.Н. Ульянова, 2018. – 334 с.]:
фиг. 8) [Антонов, В. И. Адаптивный структурный анализ электрических сигналов: теория и ее приложения в интеллектуальной электроэнергетике / В. И. Антонов. – Чебоксары : Чувашский государственный университет имени И.Н. Ульянова, 2018. – 334 с.]:

где
и

амплитуда и начальная фаза составляющей частоты  .
.
Затем формируются комплексные сигналы напряжения  ,
,  и тока
и тока  ,
,  фильтрами прямой последовательности (ФПП блок 3-7 для частоты
фильтрами прямой последовательности (ФПП блок 3-7 для частоты  и блок 3-8 для частоты
и блок 3-8 для частоты  фиг. 8):
фиг. 8):

где – фазный множитель.
– фазный множитель.
3. Блоком 4 (фиг. 7) определяют комплексные сигналы напряжения и тока прямой последовательности частот  и
и  , действующие в конце контролируемого участка.
, действующие в конце контролируемого участка.
При этом для каждой частоты асинхронного режима используют свою модель контролируемого участка  или
или  . На фиг. 9 эти модели представлены как четырехполюсник с матрицей комплексных коэффициентов
. На фиг. 9 эти модели представлены как четырехполюсник с матрицей комплексных коэффициентов ,
,  . С помощью моделей контролируемого участка преобразуют комплексные сигналы прямой последовательности в месте измерения в соответствующие комплексные сигналы в конце контролируемого участка:
. С помощью моделей контролируемого участка преобразуют комплексные сигналы прямой последовательности в месте измерения в соответствующие комплексные сигналы в конце контролируемого участка:
4. В блоке 5 (фиг. 7) определяют место электрического центра качаний на контролируемом участке.
Для этого пороговые органы оценивают отношения модулей комплексных сигналов составляющих напряжения в месте измерения  (блок 5-1 фиг. 10) и в конце контролируемого участка
(блок 5-1 фиг. 10) и в конце контролируемого участка  (блок 5-2). Сигналы срабатывания пороговых органов
(блок 5-2). Сигналы срабатывания пороговых органов
5-1 и 5-2 контролируются элементами логического И 5-3 и 5-4, формируя сигналы на своем выходе согласно условиям (3) и (4) соответственно.
Срабатывание любого из элементов логического умножения 5-3 и 5-4 приводит к срабатыванию элемента логического ИЛИ 5-5, устанавливая, что электрический центр качаний возникает на контролируемом участке. В этом случае логический сигнал  принимает значение логической единицы
принимает значение логической единицы
( ), в противном случае – логического нуля (
), в противном случае – логического нуля ( ).
).
5. Блок 6 (фиг. 7) предназначен для определения избыточной и дефицитной частей электрической системы.
Сначала блоком 6-1 (фиг. 11) определяют знак приращения угла между результирующими векторами напряжений в месте измерения и в конце контролируемого участка . Для этого сначала при помощи сумматоров (блок 6-11 и 6-12 фиг. 12) определяют результирующие векторы напряжения в месте измерения и напряжения в конце контролируемого участка как сумму одноименных комплексных сигналов составляющих частот  и
и  согласно формулам (1) и (2).
согласно формулам (1) и (2).
Затем определяют разность фаз результирующих векторов напряжений в месте измерения и в конце контролируемого участка (блок 6-13 фиг. 12):
Приращение разности фаз определяют в блоке 6-14 (фиг. 12), используя значения разности фаз на текущем и предыдущем отсчетах:
а ее знак  определяют в блоке 6-15. Если знак приращения положителен, то срабатывает пороговый орган 6-16, формируя на выходе блока 6-1 сигнал логической единицы (
определяют в блоке 6-15. Если знак приращения положителен, то срабатывает пороговый орган 6-16, формируя на выходе блока 6-1 сигнал логической единицы ( ), в противном случае – сигнал логического нуля (
), в противном случае – сигнал логического нуля ( ).
).
Положительный знак приращения разности фаз означает, что источник «за спиной» принадлежит избыточной части энергосистемы и «движется» с ускорением относительно источника противоположной стороны. Поэтому его частота равна наибольшей из частот асинхронного режима, т.е.  . Тогда источник противоположной стороны будет иметь наименьшую частоту, т.е.
. Тогда источник противоположной стороны будет иметь наименьшую частоту, т.е.  . В блоке 6-2 наибольшая частота определяется максиселектором 6-21 (фиг. 13), а наименьшая – миниселектором 6-22. Установление соответствия частот
. В блоке 6-2 наибольшая частота определяется максиселектором 6-21 (фиг. 13), а наименьшая – миниселектором 6-22. Установление соответствия частот  и
и  частотам источников осуществляется переключателями 6-23 и 6-24, управляемыми логическим сигналом
частотам источников осуществляется переключателями 6-23 и 6-24, управляемыми логическим сигналом  . На фиг. 13 положение ключей переключателей 6-23 и 6-24 указаны при . Сигнал
. На фиг. 13 положение ключей переключателей 6-23 и 6-24 указаны при . Сигнал  так же определяет принадлежность компонентов сигнала асинхронного режима к реакции электрической системы на тот или иной источник в блоке 6-3.
так же определяет принадлежность компонентов сигнала асинхронного режима к реакции электрической системы на тот или иной источник в блоке 6-3.
6. Блоком 7 (фиг. 7) выявляют момент потери устойчивости электрической сети. Его срабатывание контролируется блоком 5, который формирует разрешающий сигнал ( ) согласно своему прогнозу о предстоящем электрическом центре качаний на контролируемом участке. Потерю устойчивости определяют путем контроля блоком 7 текущего угла передачи
) согласно своему прогнозу о предстоящем электрическом центре качаний на контролируемом участке. Потерю устойчивости определяют путем контроля блоком 7 текущего угла передачи
 (8)
(8)
Для этого сначала определяют внутренние сопротивления источников. Сопротивление источника «за спиной» определяется в модели электрической сети только с источником противоположного конца (фиг. 6). В этом случае используются измерения в месте установки устройства составляющих частот действующего источника:
Сопротивление источника противоположной стороны определяется аналогично, но уже в модели электрической сети только с источником «за спиной» (фиг. 5). При этом используются составляющие сигнала в конце контролируемого участка, определенные с помощью модели контролируемого участка на частоте источника «за спиной»
Все необходимые операции формулы (9) выполняются в блоках 7-1 и 7-2, а формулы (10) – в блоке 7-3 (фиг. 14).
Поскольку сопротивления (9) и (10) рассчитаны на частоте «чужого» источника, то их необходимо пересчитать, учитывая зависимость их реактивной части от частоты. Сопротивление источника «за спиной» корректируется в блоке 7-4 по выражению:

а сопротивление источника с противоположной стороны – в блоке 7-5 по выражению:

Затем определяют ЭДС источников – каждую в своей модели (фиг. 5 и 6). Для определения ЭДС источника «за спиной» в блоке 7-6 используются электрические величины в месте измерения на частоте источника:

а при определении ЭДС источника противоположного конца в блоке 7-7 – электрические величины в конце контролируемого участка на частоте источника:

После определения комплексных сигналов ЭДС источников двухмашинной схемы замещения электрической сети определяют текущий угол передачи (8) в блоке 7-8.
Способ выявляет момент потери устойчивости электрической сети при достижении углом передачи предполагаемого критического значения. Уставка блока 7-10 задается либо как фиксированное значение  , либо определяется адаптивно в зависимости от режима электрической сети.
, либо определяется адаптивно в зависимости от режима электрической сети.
В случае адаптивной уставки достижение углом передачи критического значения определяют при углах передачи, большем 90 градусов, по моменту смены знака скорости изменения скольжения  . Скольжение определяют в блоке 7-9 по формуле (7).
. Скольжение определяют в блоке 7-9 по формуле (7).
Факт возникновения асинхронного режима в электрической сети с электрическим центром качания на контролируемом участке устанавливают, если блоком 7-10 выявлена потеря устойчивости электрической сети и на его разрешающем входе 7-11 действует сигнал от блока определения места электрического центра качаний 5. В этом случае выходной сигнал блока 7 принимает значение логической единицы (Сраб.=1) в противном случае – логического нуля (Сраб.=0).
Таким образом, декомпозиция сигнала асинхронного режима электрической сети на составляющие частот источников двухмашинной схемы замещения и использование моделей сети для отдельных составляющих сигнала позволяют прогнозировать электрический центр качаний на контролируемом участке задолго до его возникновения и повышает точность выявления асинхронного режима и электрического центра качаний.
Изобретение относится к области электротехники, в частности к релейной защите и автоматике. Технический результат заключается в повышении точности выявления асинхронного режима и электрического центра качаний электрической сети. Достигается тем, что на основе вспомогательного сигнала, полученного из фазных электрических величин в месте измерения, определяют частоты компонентов, близкие к промышленной. Это позволяет из фазных электрических величин в месте измерения выделить составляющие упомянутых частот и преобразовать их в комплексные сигналы тока и напряжения прямой последовательности упомянутых частот в месте измерения, а затем с помощью модели контролируемого участка с учетом частот сигналов – в одноименные комплексные сигналы в конце контролируемого участка. 4 з.п. ф-лы, 14 ил.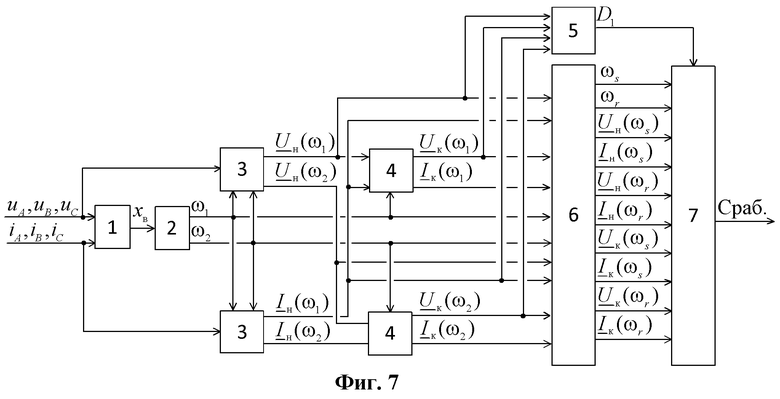
1. Способ автоматической ликвидации асинхронного режима электрической сети, согласно которому фазные токи и напряжения в месте измерения преобразуют фильтрами симметричных составляющих в комплексные сигналы тока и напряжения прямой последовательности, которые, в свою очередь, преобразуют моделью контролируемого участка линии в одноименные комплексные сигналы в конце контролируемого участка, оценивают угол между комплексными сигналами ЭДС эквивалентных источников двухмашинной схемы замещения энергосистемы, фиксируют асинхронный режим при достижении упомянутым углом заданного значения, выявляют избыточную и дефицитную части энергосистем в асинхронном режиме, определяют место электрического центра качаний и, если он находится на контролируемом участке, формируют сигнал срабатывания,
отличающийся тем, что на основе фазных электрических величин в месте измерения формируют вспомогательный сигнал, определяют частоты его компонентов, близкие к промышленной, и из фазных электрических величин в месте измерения выделяют составляющие упомянутых частот и преобразуют их в комплексные сигналы тока и напряжения прямой последовательности упомянутых частот в месте измерения и с помощью модели контролируемого участка с учетом частот сигналов – в одноименные комплексные сигналы в конце контролируемого участка,
определяют отношения модулей комплексных сигналов напряжения прямой последовательности упомянутых частот в месте измерения и одноименных комплексных сигналов в конце контролируемого участка и, если одно из них больше, а другое меньше единицы, то полагают, что электрический центр качаний находится на контролируемом участке,
формируют результирующие комплексные сигналы напряжения в месте измерения и в конце контролируемого участка как суммы комплексных сигналов напряжения прямой последовательности упомянутых частот в месте измерения и в конце контролируемого участка соответственно и определяют разность фаз результирующего комплексного сигнала напряжения в месте измерения и одноименного сигнала в конце контролируемого участка,
определяют избыточную и дефицитную части электрической системы – при условии нахождения электрического центра качаний на контролируемом участке – путем определения знака приращения величины упомянутой разности фаз, при этом если знак этого приращения положительный, то энергосистему «за спиной» относят к ее избыточной части и полагают, что она движется с частотой, большей из упомянутых частот, и энергосистему с противоположной стороны относят к дефицитной части и полагают, что она движется с меньшей из упомянутых частот, а если знак приращения отрицательный, то полагают обратное,
комплексное сопротивление каждого из источников двухмашинной схемы замещения энергосистемы определяют на частоте источника по падению напряжения на нем от тока источника противоположного конца,
в двухмашинной схеме замещения энергосистемы определяют комплексный сигнал ЭДС источника «за спиной» как сумму напряжения на зажимах сопротивления источника и комплексного сигнала напряжения прямой последовательности в месте измерения на частоте источника и аналогично сигнал ЭДС источника с противоположного конца – как сумму напряжения на зажимах сопротивления источника и комплексного сигнала напряжения прямой последовательности в конце контролируемого участка на частоте источника.
2. Способ по п. 1, отличающийся тем, что в качестве вспомогательного сигнала принимают одно из фазных напряжений.
3. Способ по п. 1, отличающийся тем, что в качестве вспомогательного сигнала принимают один из фазных токов.
4. Способ по п. 1, отличающийся тем, что вспомогательный сигнал формируют как совокупность фазных напряжений и токов.
5. Способ по одному из пп. 1-4, отличающийся тем, что фиксируют асинхронный режим энергосистемы, если сдвиг фаз ЭДС источников двухмашинной схемы замещения превышает 90 градусов и происходит изменение знака скорости изменения скольжения, причем скольжение источников напряжения двухмашинной схемы замещения энергосистемы определяют как разность частот источника «за спиной» и источника противоположной стороны.
| СПОСОБ ВЫЯВЛЕНИЯ И ЛИКВИДАЦИИ АСИНХРОННОГО РЕЖИМА В ЭЛЕКТРОЭНЕРГЕТИЧЕСКОЙ СИСТЕМЕ УСТРОЙСТВОМ АВТОМАТИКИ | 2001 |
|
RU2204877C1 |
| СПОСОБ ОПТИМАЛЬНОГО ВЕКТОРНОГО УПРАВЛЕНИЯ АСИНХРОННЫМ ДВИГАТЕЛЕМ | 2009 |
|
RU2402147C1 |
| СПОСОБ ВЫЯВЛЕНИЯ И ЛИКВИДАЦИИ АСИНХРОННОГО РЕЖИМА ЭНЕРГОСИСТЕМЫ | 2005 |
|
RU2294040C1 |
| CN 102064524 A, 18.05.2011. | |||

