Изобретение относится к электротехнике, в частности к системной автоматике, и может быть использовано как средство противоаварийного управления энергосистемой при возникновении в ней асинхронного режима.
Известен наиболее общий способ выявления и ликвидации асинхронного режима (АР) энергосистем (ЭС), основанный на измерении напряжений и токов в узле ЭС и косвенном определении критического угла между векторами э.д.с. эквивалентных генераторов в защищаемой ЭС. Действие способа основано на использовании реле направления мощности и реле сопротивления, с помощью которых по изменению знака мощности фиксируется наличие АР электропередачи, а по величине и аргументу сопротивления - попадание электрического центра качаний (ЭЦК) в контролируемый противоаварийной автоматикой участок электропередачи [1].
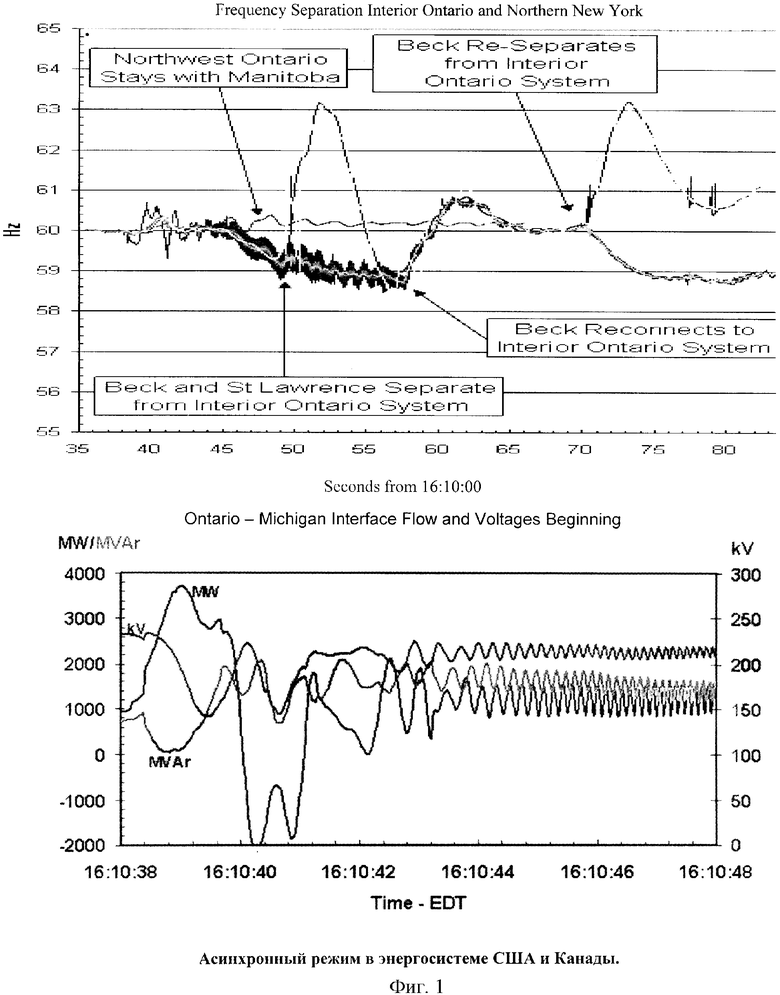
Недостатками данного способа являются его низкие селективность и чувствительность, так как реле направления мощности, используемое в качестве выявительного органа, может привести к излишнему срабатыванию или отказу устройства автоматики, а также к фиксации неправильного знака скольжения в зависимости от режима и структуры электропередачи, в частности от величины и характера нагрузки в узле включения измерительных органов автоматики. Указанный способ не позволяет достоверно фиксировать момент наступления асинхронного режима, обеспечить прогнозирование развития АР и формирование адаптивных управляющих воздействий на энергосистему в зависимости от характера процесса асинхронного режима и в соответствии с известными критериями [2]. Неправильное срабатывание устройства в режиме синхронных качаний и, тем более, задержка или отказ в ликвидации АР, когда это требуется в момент наступления АР по условиям работы энергосистемы, может получить опасное каскадное развитие аварии, как это произошло в энергосистеме США-Канады 14.08.2003 г. Из фиг.1 следует, что АР не был ликвидирован в момент его наступления, получил развитие и перешел в недопустимо длительный многочастотный АР, т.к. устройства автоматики оказались неспособны ликвидировать ни двухчастотный асинхронный режим в момент его наступления, ни многочастотный АР, когда средняя разность частот (более 7 Гц) между некоторыми асинхронно движущимися частями превысила допустимые условия работы устройств автоматики ведущих компаний мира (Siemens, ABB, Areva и др.).
Задачей изобретения является селективное выявление и ликвидация асинхронного режима автоматики независимо от изменений параметров энергосистемы, связанных с изменением режима и структурной схемы ее работы в процессе эксплуатации, а также с отклонениями частоты от синхронной в асинхронном режиме, формирование адаптивных управляющих воздействий на энергосистему в зависимости от характера процесса асинхронного режима.
Сущность изобретения заключается в том, что в узле электропередачи, являющегося одним из концов контролируемого устройством автоматики участка передачи, измеряют напряжения и токи, вычисляют комплексные величины сопротивлений по контурам фаза-фаза по отношению измеренных напряжений и токов и величину скорости их изменения во времени по величине первой производной зависимости сопротивления от времени, а на обоих концах контролируемого участка передачи измеряют частоту напряжения, передают текущую информацию о частоте на противоположный конец контролируемого участка передачи по каналу связи для передачи информации, вычисляют величину и определяют знак скорости изменения частоты напряжения обоих концов контролируемого участка во времени по величине и знаку первой производной зависимости частоты от времени, фиксируют изменение знака и направление изменения знака скорости изменения частоты в узле измерения напряжений и токов, сравнивают вычисленные величины с заданными уставками, а знак скорости изменения частоты - со знаком скорости изменения частоты на противоположном конце контролируемого участка передачи. По результатам сравнения фиксируют наличие асинхронного режима в энергосистеме с размещением электрического центра качаний на контролируемом участке передачи по признакам фиксации снижения величины любого из вычисленных сопротивлений меньше меньшей из двух уставок, заданной из условия несрабатывания в асинхронном режиме при размещении электрического центра качаний на противоположном конце контролируемого участка, и недостижения величины скорости его изменения уставки, заданной из условия отстройки устройства автоматики от коротких замыканий в зоне контроля уставкой сопротивления, и по признаку фиксации превышения величины скорости изменения частоты в узле измерения напряжений и токов ее грубой уставки, заданной из условия отстройки устройства автоматики от максимально возможной величины скорости изменения частоты в режиме синхронных качаний энергосистемы, в момент возникновения асинхронного режима, когда угол передачи проходит свое критическое значение, не ожидая момента достижения им 180°, или по признакам фиксации разных знаков скоростей изменения частоты на концах контролируемого участка передачи, и одновременной с этим фиксации превышения величиной скорости изменения частоты ее чувствительной уставки, заданной из условия обеспечения достаточной чувствительности к асинхронному режиму с размещением электрического центра качаний на контролируемом участке передачи. Если контроль величины скорости изменения частоты только ее грубой уставкой не обеспечивает этой чувствительности, фиксируют снижения величины сопротивления меньше большей из двух уставок, заданной из условия срабатывания в асинхронном режиме при размещении электрического центра качаний в любой точке контролируемого участка передачи, и недостижения величиной скорости его изменения уставки, заданной из условия отстройки устройства от коротких замыканий в зоне контроля уставкой сопротивления, либо в момент, когда текущее значение угла передачи проходит значение 180° по признаку фиксации изменения знака скорости изменения частоты в узле измерения напряжений и токов, и одновременно с этим снижения величины сопротивления меньше меньшей из двух уставок, заданной из условия несрабатывания в асинхронном режиме при размещении электрического центра качаний на противоположном конце контролируемого участка, недостижения величины скорости его изменения уставки, заданной из условия отстройки устройства от коротких замыканий в зоне контроля уставкой сопротивления. При работе устройства автоматики в многоступенчатом режиме дополнительно определяют каждый период асинхронного режима измерением промежутков времени между моментами фиксации асинхронного режима, когда текущее значение угла передачи проходит значение 180°, вычисляют величину средней разности частот между асинхронно движущимися частями энергосистемы как величину, обратную периоду, величину ее средней скорости изменения в каждом периоде асинхронного режима, как отношение изменения средней разности частот за каждый период к продолжительности периода, определяют знак средней разности частот по зафиксированному направлению изменения знака скорости изменения измеряемой частоты, величину средней разности частот сравнивают с уставкой, заданной из условия контроля превышения допустимой средней разности частот по условию обязательной ресинхронизации асинхронно движущихся частей энергосистемы, рассчитывают величину превышения средней разности частот над заданной уставкой, определяют число циклов асинхронного режима по числу его фиксаций и формируют управляющие воздействия на энергосистему.
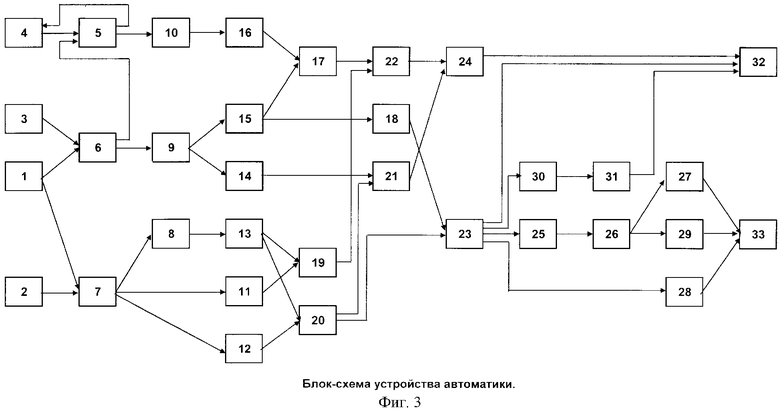
Сущность изобретения поясняется чертежами, где на фиг.2 представлена схема электропередачи, для которой осуществляется предлагаемый способ, на фиг.3 - блок-схема устройства автоматики.
Схема электропередачи включает:
Г1, Г2 - асинхронно движущиеся генераторы двухмашинной системы,
H1, Н2, НА, НВ - нагрузки соответственно узлов электропередачи 1, 2, А, В,
1, 2, А и В - узлы электропередачи,
АВ - контролируемый устройством автоматики участок электропередачи,
3, 4 - устройства автоматики.
Блок-схема устройства автоматики включает: блок измерения напряжения в узле А электропередачи (1), блок измерения тока по контролируемому участку АВ электропередачи в узле А (2), блок измерения частоты напряжения в узле А электропередачи (3), канал связи для передачи информации между узлами А и В электропередачи о текущем значении измеряемой частоты (4), блок приема в узле А текущей информации о частоте напряжения узла В и передачи текущей информации о частоте напряжения узла А в узле В (5), блок преобразования и запоминания сигнала частоты при глубоком снижении напряжения и выходе его величины за допустимый диапазон измерения частоты (6), блок вычисления комплексной величины сопротивления (7), блок вычисления величины первой производной зависимости сопротивления от времени (8), блок вычисления величины первой производной зависимости частоты узла А от времени (9), блок вычисления в узле А первой производной зависимости частоты узла В от времени (10), блок фиксации снижения величины сопротивления меньше большей из двух заданных уставок (11), блок фиксации снижения величины сопротивления меньше меньшей из двух заданных уставок (12), блок фиксации непревышения величиной первой производной зависимости сопротивления от времени заданной уставки (13), блок фиксации превышения величиной первой производной зависимости частоты узла А от времени грубой уставки (14), блок фиксации превышения величиной первой производной зависимости частоты узла А от времени чувствительной уставки (15), блок фиксации превышения величиной первой производной зависимости частоты узла В от времени чувствительной уставки в узле А (16), блок фиксации разных знаков скорости изменения частоты в узлах А и В (17), блок фиксации изменения знака скорости изменения частоты узла А и определение направления его изменения (18), схемы «и» (19), (20), (21), (22) и (23), схема «≥1» (24), блок вычисления периода асинхронного режима (25), блок вычисления средней разности частот между асинхронно движущимися частями энергосистемы (26), блок вычисления величины превышения средней разности частот над заданной уставкой (27), блок определения средней разности частот (28), блок вычисления средней скорости именения разности частот между асинхронно движущимися частями энергосистемы (29), счетчик циклов асинхронного режима (30), блок фиксации достижения числа циклов асинхронного режима заданной уставки (31), блок формирования управляющих воздействий на энергосистему с целью деления асинхронно движущихся частей энергосистемы (32), блок формирования управляющих воздействий на энергосистему с целью ресинхронизации ее асинхронно движущихся частей (33).
Способ осуществляется следующим образом. На фиг.2 устройствами автоматики (3) и (4), установленными соответственно в узлах А и В электропередачи, контролируют участок АВ электропередачи выполнением операций в соответствии с блок-схемой устройства автоматики.
Блоками (1), (2), (3) осуществляется измерение соответственно напряжения узла, тока по контролируемому участку и частоты напряжения узла.
По двум самостоятельным каналам связи (4) осуществляется передача информации в обоих направлениях о текущем значении частоты. Сигнал о текущем значении частоты с выхода блока измерения частоты (3) поступает на первый вход блока преобразования и запоминания сигнала частоты (6), в котором осуществляются преобразование этого сигнала в сигнал, способный управлять генерацией приемопередатчиком (5) сигнала для передачи по каналу связи (4) и запоминание сигнала о текущем значении частоты при периодическом глубоком кратковременном снижении напряжения во время асинхронного режима электропередачи ниже уровня допустимого по условию точности измерения частоты устройством автоматики. Время запоминания определяется промежутком времени, в течение которого напряжение оказалось ниже допустимого уровня. Управление формированием сигнала на выходе блока (6) осуществляется в основном сигналом о текущем значении частоты, поступающем на первый вход, и лишь кратковременно за счет памяти блока (6) в зависимости от уровня напряжения, подаваемого на второй вход блока (6) от выхода блока измерения напряжения (1) и допустимого уровня снижения напряжения по условию точности измерения частоты. Измеренные напряжения и токи с выхода соответственно блоков (1) и (2) поступают на вход блока (7), где вычисляются комплексные величины сопротивлений по контурам фаза-фаза. С выхода блока (7) сигналы о величинах сопротивлений поступают на вход блока (8), где вычисляются величины их первых производных. Сигнал о текущем значении частоты в узле установки устройства автоматики с выхода блока (6) подается на вход блока (9), где вычисляется величина ее первой производной. Сигнал о текущем значении частоты узла, противоположного месту установки устройства автоматики, с выхода блока (5) поступает на вход блока (10), где вычисляется величина ее первой производной.
Комплексная величина сопротивления с выхода блока (7) поступает на вход блоков (11) и (12) для сравнения с заблаговременно заданными и хранящимися в их памяти уставками. Уставка сопротивления для блока (11) задана из условия обеспечения достаточной чувствительности к асинхронному режиму независимо от места размещения электрического центра качаний (ЭЦК) на контролируемом участке АВ (большая уставка), а для блока (12) - из условия несрабатывания в асинхронном режиме при размещении ЭЦК на противоположном конце контролируемого участка, т.е. с охватом 85% контролируемого участка АВ (меньшая уставка). В случае снижения сопротивления ниже заданной большей из двух уставок фиксируется это событие появлением сигнала на выходе блока (11). В случае ее снижения сопротивления ниже меньшей из двух заданных уставок - это событие фиксируется появлением сигнала на выходе блоков (11) и (12) одновременно. Величина первой производной зависимости сопротивления от времени с выхода блока (8) поступает на вход блока (13) для сравнения с заблаговременно заданной и хранящейся в его памяти уставкой. В случае непревышения контролируемой величиной заданной уставки это событие фиксируется появлением сигнала на выходе блока (13).
Величина первой производной зависимости от времени частоты в месте установки устройства с выхода блока (9) поступает на вход блоков (14) и (15) для сравнения с заблаговременно заданными и хранящимися в их памяти уставками. Уставка для блока (14) задана - грубая - из условия отстройки устройства автоматики от максимально возможной величины первой производной зависимости частоты от времени в режиме синхронных качаний энергосистемы, а для блока (15) - чувствительная - из условия обеспечения достаточной чувствительности устройства к асинхронному режиму независимо от места размещения ЭЦК на контролируемом участке АВ. В случае превышения величиной контролируемого параметра грубой уставки это событие фиксируется появлением сигнала на выходе блоков (14) и (15). В случае же превышения ею только чувствительной уставки это событие фиксируется появлением сигнала только на выходе блока (15).
Сигнал о величине первой производной зависимости от времени частоты узла противоположного месту установки устройства с выхода блока (10) поступает на вход блока (16) для сравнения с заблаговременно заданной и хранящейся в памяти блока уставкой. Уставка задана из условия обеспечения достаточной чувствительности к асинхронному режиму независимо от места размещения ЭКЦ на контролируемом участке АВ. В случае превышения величиной контролируемого параметра уставки это событие фиксируется появлением сигнала на выходе блока (16). Сигналы с выходов блоков (15) и (16) поступают на вход блока (17) для сравнения их знаков. В случае разных знаков сигналов это событие фиксируется появлением сигнала на выходе блока (17).
В случаях, когда грубая уставка, заданная в блоке (14), обеспечивает достаточную чувствительность к асинхронному режиму независимо от расположения ЭЦК на контролируемом участке АВ, можно отказаться от использования канала связи (4) и блоков (5), (10), (16), (17).
Кроме вышеизложенного с выхода блока (15) сигнал поступает на вход блока (18). В случае изменения знака сигнала это событие фиксируется блоком (18) и на его выходе появляется импульс, знак которого определяется направлением изменения знака на входе блока.
Фиксируется одновременное появление сигналов на выходах блоков:
(11) и (13) - появлением сигнала на выходе блока (19);
(12) и (13) - появлением сигнала на выходе блока (20);
(14) и (20) - появлением сигнала на выходе блока (21);
(17) и (19) - появлением сигнала на выходе блока (22);
(18) и (20) - появлением импульсов на выходе блока (23) определенного знака, зависящего от знака импульса на выходе блока (18).
Сигналы с выхода блоков (21) и (22) поступают на входы блока (24), на выходе которого появляется сигнал в случае появления сигнала на любом его входе или на обоих входах одновременно.
Появлением сигнала на выходе блока (24) фиксируется момент возникновения асинхронного режима, когда текущее значение угла передачи проходит критическое значение δ≈δкр, с размещением ЭЦК на контролируемом участке АВ. Сигнал с выхода блока (24) поступает на вход блока (32), формирующего управляющие воздействия на энергосистему с целью деления асинхронно движущихся частей энергосистемы при такой необходимости.
Появлением сигнала на выходе блока (23) фиксируется асинхронный режим, когда текущее значение угла передачи проходит значение δ≈180°, с размещением ЭЦК на контролируемом участке АВ. Сигнал с выхода блока (23) поступает:
- на вход блока (32), формирующего управляющие воздействия на энергосистему с целью деления асинхронно движущихся частей энергосистемы при такой необходимости;
- на вход блока (25), который вычисляет период асинхронного режима по промежутку времени между импульсами на его входе;
- на вход блока (28), который определяет знак средней разности частот между асинхронно движущимися частями энергосистемы по знаку импульсов на его входе;
- на вход блока (30), который фиксирует число циклов асинхронного режима с размещением ЭЦК на контролируемом участке АВ.
С выхода блока (25) сигнал поступает на вход блока (26), который вычисляет среднюю разность частот между асинхронно движущимися частями энергосистемы. С выхода блока (26) сигнал поступает на вход блока (27), где средняя разность частот сравнивается с уставкой, заданной из условия обязательной ресинхронизации несинхронно движущихся частей энергосистемы, вычисляется величина превышения контролируемого параметра над уставкой. Кроме того, с выхода блока (26) сигнал поступает на вход блока (29), где вычисляются величина и знак средней скорости изменения частоты за каждый период асинхронного режима. Сигналы с выходов блоков (27)-(29), характеризующие процесс асинхронного режима с размещением ЭЦК на контролируемом участке АВ по знаку средней разности частот (блок 28), по величине превышения средней разности частот над заданной уставкой (блок 27) и по величине и знаку средней скорости изменения частоты за каждый период асинхронного режима (блок 29), поступают на вход блока (33), формирующего управляющие воздействия на энергосистему с целью ресинхронизации ее асинхронно движущихся частей при такой целесообразности.
Сигнал с выхода блока (30) поступает на вход блока (31) с целью сравнения с заданной и хранящейся в памяти блока уставкой числа циклов асинхронного режима и по достижении контролируемого параметра уставки фиксируется это событие появлением сигнала на выходе блока (31), который поступает на вход блока (32) для деления асинхронно движущихся частей энергосистемы при такой необходимости.
В зависимости от потребности энергосистемы в моменте ликвидации асинхронного режима, возможностей организации канала связи для передачи информации о текущем значении частоты или исправности этого канала и в зависимости от чувствительности грубой уставки по величине скорости изменения частоты к асинхронному режиму независимо от места размещения электрического центра качаний на контролируемом устройством автоматики участке передачи способ обеспечивает возможность фиксации асинхронного режима с осуществлением одного из нижеприведенных вариантов ближнего резервирования действия выявительного органа устройства автоматики другим иного принципа действия:
- две основные фиксации асинхронного режима в момент δ≈δкр и резервирующую основные фиксацию - в момент δ≈180° (канал связи есть, грубая уставка обеспечивает достаточную чувствительность);
- основную фиксацию асинхронного режима в момент δ≈δкр, дополнительную к основной фиксации - в момент δ≈δкр при близких расположениях ЭЦК и резервирующую основную фиксацию - в момент δ≈180° (канал связи есть, грубая уставка не обеспечивает достаточную чувствительность);
- основную фиксацию асинхронного режима в момент δ≈δкр и резервирующую основную фиксацию - в момент δ≈180° (канала связи нет, грубая уставка обеспечивает достаточную чувствительность);
- основную фиксацию асинхронного режима в момент δ≈180° и дополнительную фиксацию - в момент δ≈δкр при близких расположениях ЭЦК (канала связи нет, грубая уставка не обеспечивает достаточную чувствительность).
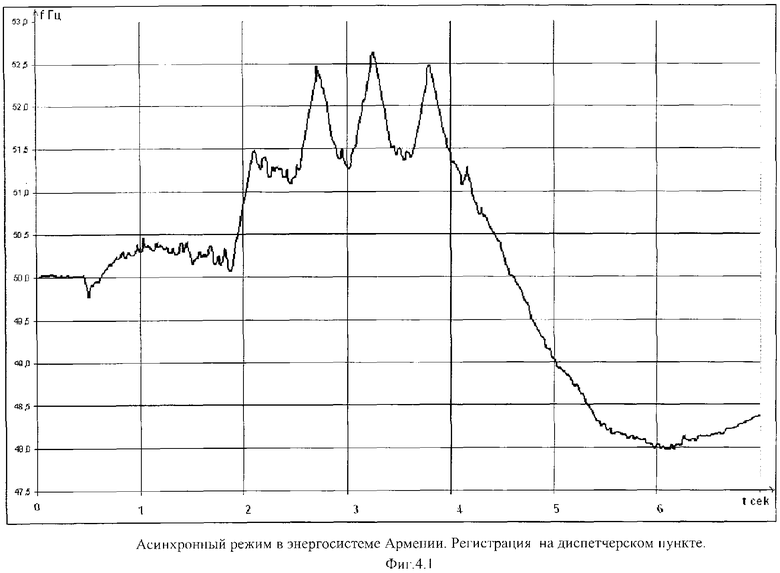
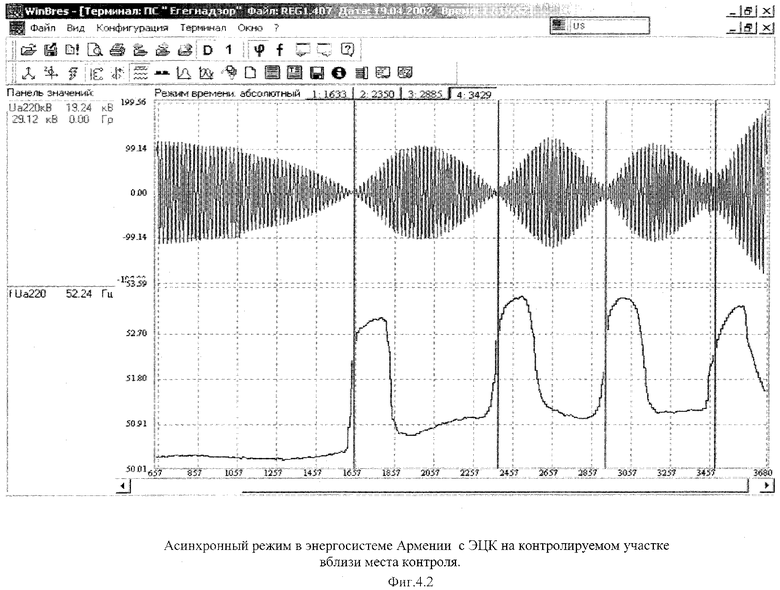
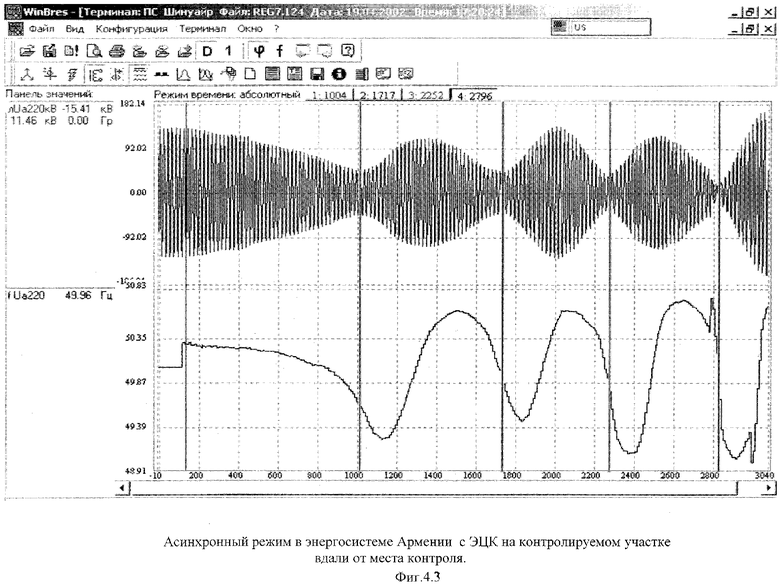
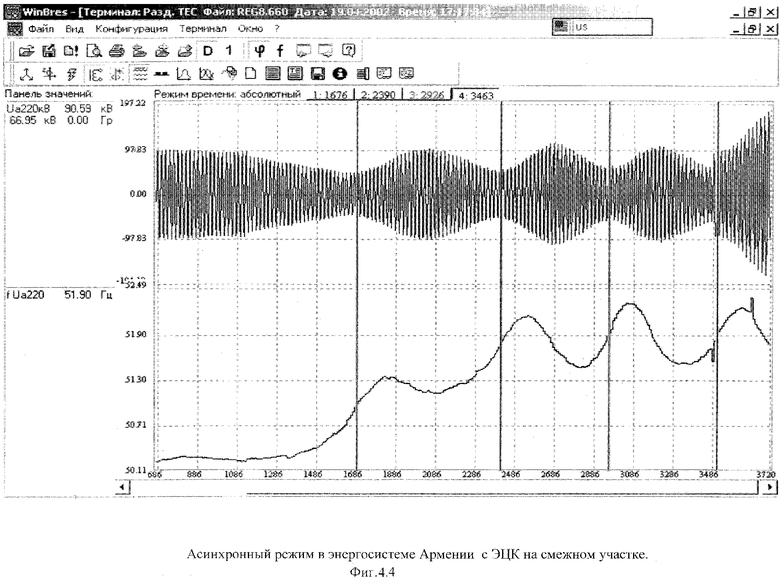
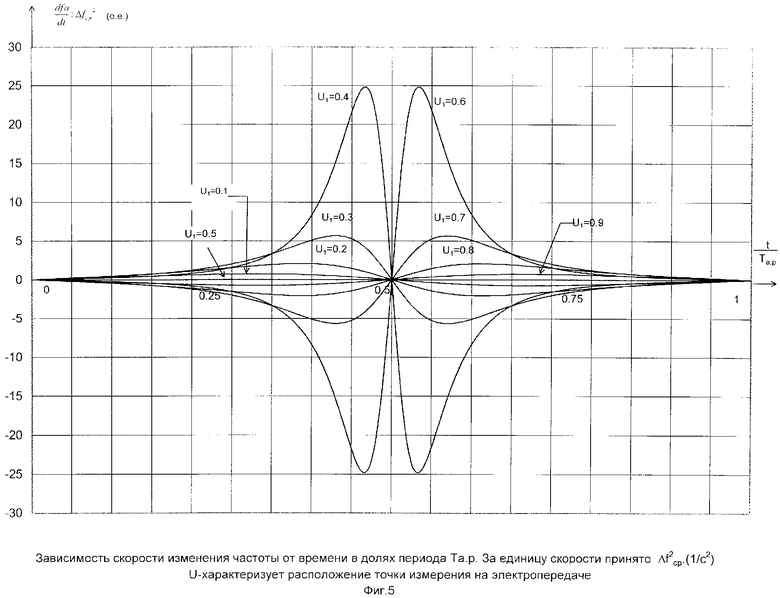
Для оценки контролируемости величины скорости изменения частоты в узлах электропередачи в момент δ≈δкр на фиг.1 показано зарегистрированное изменение частоты в энергосистеме США-Канады во время асинхронного режима 14.08.2003 г., из которой видно, что скорость изменения частоты в момент δ≈δкр в узле энергосистемы составила 1 Гц/сек, а на фиг.4.1-4.4 показаны зарегистрированные изменения частоты в энергосистеме Армении во время асинхронного режима 19.04.2002 г., из которых видно, что скорость изменения частоты на концах контролируемого участка электропередачи 220 кВ составила более 20 Гц/сек вблизи от электрического центра качаний на стороне Армянской энергосистемы и более 4 Гц/сек, вдали от центра на стороне Иранской энергосистемы, а в удаленном узле на стороне Армянской энергосистемы - более 4 Гц/сек. Характер общей зависимости величины и знака скорости изменения частоты во времени и в зависимости от места расположения узла измерения на электропередаче, полученный на основе аналогичной зависимости частоты [3], приведен на фиг.5.
Вышеприведенное доказывает принципиальную контролируемость величины и знака скорости изменения частоты в асинхронном режиме энергосистемы.
Надежную работу устройства автоматики при глубоких снижениях напряжения вблизи электрического центра качаний обеспечивают типовыми решениями точного измерения частоты в широком диапазоне изменения напряжения и с помощью запоминания измеренной частоты на время выхода величины напряжения за допустимый диапазон измерения частоты.
Способ обеспечивает по принципу действия и выбором уставок устройства автоматики надежную его отстройку от синхронных качаний, коротких замыканий и иных коммутаций в энергосистеме, аварийных снижений и повышений частоты при сбросах генерации или нагрузки в энергосистеме, а также от асинхронного режима при размещении электрического центра качаний не на контролируемом участке, и, вместе с тем, способ обеспечивает селективную и адаптивную фиксацию асинхронного режима в момент его возникновения, т.е. когда угол передачи проходит свое критическое значение δ≈δкр или при необходимости при δ≈180° при попадании электрического центра качаний в контролируемый устройством автоматики участок электропередачи независимо от изменений режима работы и структуры энергосистемы и независимо от величины отклонений частоты в энергосистеме, т.к. от этих факторов принципиально не зависит ни момент фиксации разных знаков скоростей изменения частоты на концах контролируемого участка, ни момент фиксации изменения знака скорости изменения частоты в узле измерения напряжений и токов, ни момент превышения величиной скорости изменения частоты над заданной уставкой.
Способ обеспечивает также селективность и адаптивность управляющих воздействий на энергосистему, формируемых устройством автоматики, с целью реализации мероприятий, способствующих ресинхронизации, т.к. вмешательство устройства автоматики в процесс ресинхронизации происходит только после селективной фиксации асинхронного режима в момент δ≈180°, превышения величиной среднего скольжения в процессе асинхронного режима над допустимой по условию обязательной самостоятельной ресинхронизации, а управляющие воздействия формируются дозированно в зависимости от величины этого превышения, величины и знака средней скорости изменения скольжения, т.е. с учетом прогноза развития процесса асинхронного режима. В случаях же неуспешности ресинхронизации, или ее нецелесообразности, или невозможности устройство осуществляет деление асинхронно движущихся частей энергосистемы.
Из вышеизложенного следует, что задача обеспечения способом селективности и адаптивности действия устройства автоматики в изменяющихся условиях работы энергосистемы решена во всех вариантах его использования в зависимости от потребности конкретной энергосистемы.
Реализация предложенного способа выявления и ликвидации асинхронного режима может быть осуществлена на основе использования микропроцессорной техники, в частности на базе микропроцессорных устройств релейной защиты и автоматики для высоковольтных линий электропередачи производства компании Siemens, ABB, Areva и др.
Основными преимуществами предложенного способа выявления и ликвидации асинхронного режима энергосистемы являются возможность фиксировать наличие асинхронного режима в момент его возникновения, возможность прогнозирования развития процесса асинхронного режима, адаптивность управляющих воздействий на энергосистему во всех вариантах его использования в зависимости от потребности энергосистемы, отсутствие зависимости его применения от диапазона реальных изменений частоты в асинхронно движущихся частях энергосистемы.
Источники информации
1. Гоник Я.Е., Иглицкий Е.С. ″Автоматика ликвидации асинхронного режима″. М., Энергия, 1980.
2. Хачатуров А.А. ″Несинхронные включения и ресинхронизация в энергосистемах″. М., Энергия, 1977.
3. Рабинович Р.С. ″Автоматическая частотная разгрузка энергосистем″. М., Энергия, 1980.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ВЫЯВЛЕНИЯ И ЛИКВИДАЦИИ АСИНХРОННОГО РЕЖИМА В ЭЛЕКТРОЭНЕРГЕТИЧЕСКОЙ СИСТЕМЕ УСТРОЙСТВОМ АВТОМАТИКИ | 2001 |
|
RU2204877C1 |
| СПОСОБ ВЫЯВЛЕНИЯ И ЛИКВИДАЦИИ АСИНХРОННОГО РЕЖИМА В ЭЛЕКТРОЭНЕРГЕТИЧЕСКОЙ СИСТЕМЕ УСТРОЙСТВОМ АВТОМАТИКИ | 2006 |
|
RU2316099C1 |
| СПОСОБ ВЫЯВЛЕНИЯ АСИНХРОННОГО РЕЖИМА В ЭНЕРГОСИСТЕМЕ | 2006 |
|
RU2316098C1 |
| СПОСОБ АВТОМАТИЧЕСКОЙ ЛИКВИДАЦИИ АСИНХРОННОГО РЕЖИМА | 2003 |
|
RU2249894C2 |
| СПОСОБ ВЫЯВЛЕНИЯ УГРОЗЫ И ФАКТА ВОЗНИКНОВЕНИЯ АСИНХРОННОГО РЕЖИМА В ЭНЕРГОСИСТЕМЕ | 1997 |
|
RU2104603C1 |
| СПОСОБ ВЫЯВЛЕНИЯ И ЛИКВИДАЦИИ АСИНХРОННОГО РЕЖИМА В ЭНЕРГОСИСТЕМЕ УСТРОЙСТВОМ АВТОМАТИКИ | 2006 |
|
RU2316100C1 |
| СПОСОБ ВЫЯВЛЕНИЯ АСИНХРОННОГО РЕЖИМА ЭЛЕКТРОПЕРЕДАЧИ | 2006 |
|
RU2316101C1 |
| СПОСОБ ВЫЯВЛЕНИЯ АСИНХРОННОГО РЕЖИМА ЭЛЕКТРОПЕРЕДАЧИ | 1997 |
|
RU2117374C1 |
| СПОСОБ ВЫЯВЛЕНИЯ АСИНХРОННОГО РЕЖИМА | 2000 |
|
RU2199807C2 |
| Способ автоматической ликвидации асинхронного режима электрической сети | 2022 |
|
RU2790631C1 |
В узле электропередачи, являющемся одним из концов контролируемого участка, измеряют напряжения и токи, вычисляют комплексные величины сопротивлений по контурам фаза-фаза по отношению измеренных напряжений и токов и величину скорости их изменения во времени, измеряют частоту напряжения, вычисляют величину и определяют знак скорости изменения частоты, фиксируют изменение знака скорости изменения частоты и направление его изменения, сравнивают вычисленные величины с заданными уставками, а знак скорости изменения частоты - с аналогичным на противоположном конце и фиксируют асинхронный режим с размещением электрического центра качаний на контролируемом участке в момент его наступления по признаку превышения величиной скорости изменения частоты грубой уставки или по признакам фиксации разных знаков этого параметра на концах контролируемого участка и превышения ее величиной чувствительной уставки, либо в момент, когда угол проходит значение 180° по признаку изменения знака параметра. В многоступенчатом режиме работы устройства автоматики формируют адаптивные управляющие воздействия на энергосистему в зависимости от характера процесса асинхронного режима. Технический результат - повышение достоверности выявления асинхронного режима энергосистемы. 5 ил.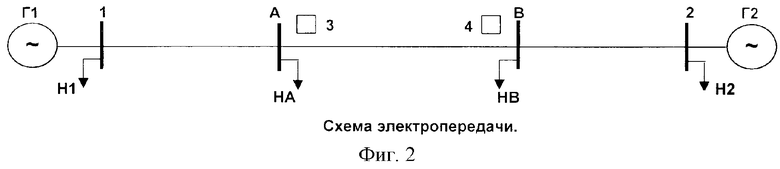
Способ выявления и ликвидации асинхронного режима энергосистемы, заключающийся в том, что в узле электропередачи, являющемся одним из концов контролируемого участка передачи, измеряют напряжения и токи, вычисляют комплексные величины сопротивлений по контурам фаза - фаза по отношению измеренных напряжений и токов и величину скорости их изменения во времени по величине первой производной зависимости сопротивления от времени, отличающийся тем, что на обоих концах контролируемого участка передачи измеряют частоту напряжения, передают текущую информацию о частоте на противоположный конец контролируемого участка передачи по каналу связи для передачи информации, вычисляют величину и определяют знак скорости изменения частоты напряжения обоих концов контролируемого участка во времени по величине и знаку первой производной зависимости частоты от времени, фиксируют изменение знака и направление изменения знака скорости изменения частоты в узле измерения напряжений и токов, сравнивают вычисленные величины с заданными уставками, а знак скорости изменения частоты со знаком скорости изменения частоты на противоположном конце контролируемого участка передачи, и по результатам сравнения фиксируют наличие асинхронного режима в энергосистеме с размещением электрического центра качаний на контролируемом участке передачи и формируют управляющие воздействия на энергосистему по признакам фиксации снижения величины любого из вычисленных сопротивлений меньше меньшей из двух уставок, заданной из условия несрабатывания в асинхронном режиме при размещении электрического центра качаний на противоположном конце контролируемого участка и непревышения величины скорости его изменения уставки, заданной из условия отстройки устройства автоматики от коротких замыканий в зоне контроля уставкой сопротивления, и по признаку фиксации превышения величины скорости изменения частоты в узле измерения напряжений и токов ее грубой уставки, заданной из условия отстройки устройства автоматики от максимально возможной величины скорости изменения частоты в режиме синхронных качании энергосистемы, в момент возникновения асинхронного режима, когда угол передачи проходит свое критическое значение, не ожидая момента достижения им 180°, или по признакам фиксации разных знаков скоростей изменения частоты на концах контролируемого участка передачи, и одновременной с этим фиксации превышения величиной скорости изменения частоты ее чувствительной уставки, заданной из условия обеспечения достаточной чувствительности к асинхронному режиму с размещением электрического центра качаний на контролируемом участке передачи, если контроль величины скорости изменения частоты только ее грубой уставкой не обеспечивает этой чувствительности, фиксируют снижения величины сопротивления меньше большей из двух уставок, заданной из условия срабатывания в асинхронном режиме при размещении электрического центра качаний в любой точке контролируемого участка передачи, и недостижения величиной скорости его изменения уставки, заданной из условия отстройки устройства от коротких замыканий в зоне контроля уставкой сопротивления, либо в момент, когда текущее значение угла передачи проходит значение 180° по признаку фиксации изменения знака скорости изменения частоты в узле измерения напряжений и токов, и одновременно с этим снижения величины сопротивления меньше меньшей из двух уставок, заданной из условия несрабатывания в асинхронном режиме при размещении электрического центра качаний на противоположном конце контролируемого участка и недостижения величиной скорости его изменения уставки, заданной из условия отстройки устройства от коротких замыканий в зоне контроля уставкой сопротивления, а при работе устройства автоматики в многоступенчатом режиме дополнительно определяют каждый период асинхронного режима измерением промежутков времени между моментами фиксации асинхронного режима, когда текущее значение угла передачи проходит значение 180°, вычисляют величину средней разности частот между асинхронно движущимися частями энергосистемы как величину, обратную периоду, величину ее средней скорости изменения в каждом периоде асинхронного режима как отношение изменения средней разности частот за каждый период к продолжительности периода, определяют знак средней разности частот по зафиксированному направлению изменения знака скорости изменения измеряемой частоты, величину средней разности частот сравнивают с уставкой, заданной по условию контроля превышения допустимой по условию обязательной ресинхронизации асинхронно движущихся частей энергосистемы, рассчитывают величину превышения средней разности частот над заданной уставкой, определяют число циклов асинхронного режима по числу его фиксаций и формируют управляющие воздействия на энергосистему.
| СПОСОБ ВЫЯВЛЕНИЯ И ЛИКВИДАЦИИ АСИНХРОННОГО РЕЖИМА В ЭЛЕКТРОЭНЕРГЕТИЧЕСКОЙ СИСТЕМЕ УСТРОЙСТВОМ АВТОМАТИКИ | 2001 |
|
RU2204877C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО ПРЕДОТВРАЩЕНИЯ АСИНХРОННОГО РЕЖИМА | 1998 |
|
RU2159981C2 |
| US 53372206 A, 09.08.1994. | |||

