Область техники, к которой относится изобретение
Варианты осуществления изобретения относятся к медицинскому устройству и способам изготовления такого медицинского устройства, в частности, для использования в стоматологии и ортопедии, например, имплантациях, включающих в себя скуловые имплантации и импланты для ортопедических целей.
Описание связанного уровня техники
Импланты и имплантации хорошо известны уже много лет, в том числе скуловые имплантaции, которые представляют собой зубные импланты в верхнечелюстную кость.
Carlos Aparicio и др. опубликовал статью, озаглавленную “Скуловые импланты: показания, способы и результаты, и код успеха скуловой имплантации” в журнале Periodontology 2000, Vol. 64, 2013, 1-18, доступно в Интернете по адресу www.apariciozygomatic.com wp- content/uploads/2015/05/ Zygomatic-Success-Code_2.pdf, в которой вневерхнечелюстная имплантация скулового импланта в череп представлена на странице 3 как фиг. 2. Внутрисинусальная имплантация скулового импланта представлена на странице 6 как фиг. 5.
В каталоге, опубликованном в Интернете организацией Noris Medical of Nesher, Израиль, на странице http://www.norismedical.com/products/catalog-2/, скуловые импланты, изделия и инструменты для использования с зубными имплантами в целом и со скуловыми имплантами, в частности, представлены на страницах 22-25.
В Патенте США № 4,235,428 Jack H. Davis обнародовал ортопедический инструмент, который улучшает способ, посредством которого костные сквозные штифты вставляются в костные фрагменты.
Патент США № 4,257,411, выданный Kenneth O. Cho раскрывает направляющую для хирургического сверла, приспособленную для временной установки в области дистального участка бедренной кости для сверления костного канала через участок бедренной кости с большой точностью.
Патент США № 4,848,327, выданный Kevin D. Perdue раскрывает технику, процедуру и устройство, посредством которого хирургические штифты или винты могут быть имплантированы в тело для фиксации ортопедического стержня для прочности или укрепления или ограничения перемещения сломанной кости.
Международная патентная заявка WO 2010/054493 Al , поданная Hans Stadler, описывает устройство, имеющее тянущий элемент, который закрепляется в первой кости или костном фрагменте, и который может направляться через первый костный канал во второй костный канал второй кости или костного фрагмента.
Патент США № 3,867,932, выданный Donald R. Huene, раскрывает блок для соединения противоположных сегментов сломанной кости с помощью усовершенствованного зажима для фиксации сегментов соприкасающимся образом.
Патентная заявка США № 2007/0239168, поданная Thomas Kuenzi, раскрывает нацеливающее устройство для вставки задающих угол длинных винтов в конкретную область кости для оптимального лечения костных переломов с помощью пластиночной/винтовой системы (систем),
Патентная публикация США № 20070055249, поданная David G. Jensen, раскрывает системы, устройства, способы и наборы для избирательного проделывания отверстий костных пластин для образования резьбовых отверстий во время вставки костных пластин.
Сущность изобретения
Представлен механизм для медицинского устройства для направления наконечника или направляемого вручную механизированного привода для безопасного сверления несквозного канала в требуемой ориентации направления.
Медицинское устройство 10 предназначено для механизированного приведения в действие и направления медицинских приспособлений, например, сверл, и для ручного направления имплантов и ручных инструментов. Медицинское устройство имеет механический механизм, имеющий первый участок механизма и второй участок механизма.
Первый участок механизма имеет контактный элемент для размещения на выбранном месте на участке тела. Второй участок механизма имеет рабочий модуль для направления и поддержания медицинского приспособления 19. Механический механизм обеспечивает расположение контактного элемента и рабочего модуля относительно друг друга в двух направлениях вдоль отрезка прямой линии. Кроме того, механический механизм обеспечивает поддержание медицинского приспособления постоянно нацеленным на выбранное место.
Также описан способ изготовления медицинского устройства для имплантации медицинских имплантов, включающих в себя ортопедические импланты, зубные импланты и скуловые импланты ZI. Кроме того, иллюстрируется вариант осуществления медицинского устройства, в котором конструкция медицинского устройства изготовлена в виде сплошного и жесткого куска материала.
Техническая проблема
Проблема состоит в том, что пользователь, чаще всего хирург, вынужден вручную направлять и ориентировать ручное устройство для сверления канала, без помощи оборудования для визуализации и вычислительных средств, в точной пространственной ориентации в трехмерном объеме тела. Проблема является особенно острой, когда небольшое отклонение просверленного канала от требуемой ориентации является критическим и может вызвать непоправимые повреждения тела. Шансы сохранить требуемое направление и ориентацию направляемого вручную просверливаемого канала являются довольно сомнительными. Когда точная ориентация является критичной, направление вручную является неподходящим. Отклонение от заданного направления сверления может привести к повреждению органа(ов), задетых сверлом, при этом повреждения иногда являются непоправимыми. Другими словами, проблема состоит в том, как вручную направить и просверлить несквозной канал в точной ориентации в направлении невидимой целевой точки без помощи другой аппаратуры. Такая проблема встречается, например, при имплантации внутрисинусального скулового импланта ZI,как представлено на фиг. B и C.
С целью иллюстрации и ориентации на фиг. A представлен участок тела BDY, включающий в себя кость BNE. Тело может представлять собой участок живого организма, включающий в себя кожу, ткань и кости, например, людей и животных. Участок кости BNE, невидимый при осмотре, представлен пунктирными линиями. Участок кости BNE может быть доступен для осмотра в точке A.
Можно рассмотреть необходимость сверления несквозного канала BBOR , начиная от доступной точки входа NTRPNT до, но не глубже, чем целевая точка TRGTP. Целевая точка TRGTP скрыта в кости BNE, при этом кость может ощущаться при прикосновении с внешней стороны BDYEX тела BDY. Прямая ось X проходит через точку входа NTRPNT и целевую точку TRGTP, входит на наружную поверхность BDYEX тела BDY в выбранном месте EMPL.
Такая проблема встречается, например, при имплантации внутрисинусального скулового импланта ZI,как представлено на фиг. B и C.
Фиг. B представляет собой вид спереди лица пациента, на котором представлена линия оси X. Ось X обозначает направление, выбранное для сверления несквозного канала, который начинается от входа NTRPT, расположенного в точке A на десне верхней челюсти MAX. Углы, обозначенные как L и R вокруг точки A в качестве центра вращения, указывают возможные угловые отклонения от оси X. Следует быть внимательным, чтобы исключить отклонения от оси X для уменьшения повреждения жизненно важных органов.
Важно не допустить таких отклонений от оси X. Например, представлено, что отклонение на угол R канал пересекает глазницу. Однако, угловых отклонений на виде спереди нетрудно избежать, поскольку они могут быть видны при продлении направления оси сверлящего канал инструмента. Скорее проблему представляют отклонения в плоскости поперечного сечения, проходящей через ось X перпендикулярно виду спереди, как представлено на фиг. C.
Фиг. C - схематичное поперечное сечение верхней челюсти MAX, представляющее требуемую ось X, альвеолярный отросток ALVRG и точку входа A. Суть проблемы, подлежащей решению, составляют угловые отклонения γ и δ от оси X, и вокруг точки A в качестве центра вращения. В отличие от вида лица спереди, представленного на фиг. B, поперечное сечение фиг. C скрыто от осмотра. Обычно удаляется и выполняется отверстие через стенку верхнечелюстной пазухи SNSWL для визуальной проверки и попытки ориентировать сверло. Несмотря на это такое нежелательное вмешательство не исключает непредвиденных проблем.
Для скуловой имплантaции очевидно, что скуловой имплант ZI должен закрепляться в скуловой кости Z, представленной приблизительно пунктирными линиями на фиг. B. Расположение скуловой кости Z черепа может быть легко обнаружено врачом посредством пальпации лица пальцами руки, в целом под полостью глазницы глаза.
Именно рядом и напротив скуловой кости Z врач или пользователь медицинского устройства 10 и/или 310 будет определять размещение выбранного места EMPL. Как только контактный элемент 151 располагается на выбранном месте EMPL, пользователь будет иметь уверенность в том, что требуемая ось X проходит через место EMPL и будет выходить через это определенное место. Использование устройства для ориентации зубного приспособления, или, более конкретно, устройства для ориентации зубного сверла, например, медицинского устройства 10 и/или 310, обеспечивает уверенность в безопасности имплантации.
Решение проблемы
Фиг. D иллюстрирует примерное решение указанной проблемы. Представленное медицинское устройство 10 включает в себя механический механизм 11, имеющий первый участок 12 и второй участок 14. Первый участок 12 и второй участок 14 взаимно соединены для обеспечения размещения относительно друг друга в ограниченном двунаправленном поступательном перемещении вдоль прямолинейного отрезка линии на оси 10X. На фиг. D представлено, что первый участок 12 поддерживает второй участок 14 и обеспечивает взаимное скользящее поступательное перемещение обоих участков. Можно сказать, что каждый из первого участка 12 и второго участка 14 поддерживает скользящим образом.
Первый участок 12 поддерживает контактный модуль 15, который удерживает контактный элемент 151, а второй участок 14 поддерживает рабочий модуль 16. Контактный элемент 151 располагается на теле BDY в месте EMPL, представленном на фиг. A. Механический механизм 11 выполнен с возможностью постоянного направления продольной оси 199 медицинского приспособления 19, например, сверла 19, поддерживаемого рабочим модулем 16, в направлении контактного элемента 151. В описании сверло 194 может включать в себя сверла для предварительного сверления, сверла для окончательного сверления, сверла для имплантации, сверла для несквозного канала и тому подобное, для зубных и ортопедических имплантаций и медицинских вмешательств в целом. Посредством направления в ориентации друг к другу медицинское приспособление 19 и контактный элемент 151 постоянно располагаются в линейном совмещении с осью 10X и вдоль оси 10X медицинского устройства 10. Отсюда, когда контактный элемент 151 удерживается на месте EMPL, а медицинское приспособление 19 располагается на точке входа NTRPNT, первый и последний соединены осью 10X. Ось X на фиг. A соосна с осью 10X на фиг. D, и обе оси проходят через целевую точку TRGPT. Таким образом, когда медицинское приспособление 19 представляет собой сверло, приводимое в действие рабочим модулем 16, несквозной канал BBOR будет нацелен на целевую точку TRGTP. Таким образом обеспечивается решение проблемы.
Полезные результаты
Использование медицинского устройства 10 гарантирует, что посредством механически направляющих медицинских приспособлений 19 они могут нацеливаться от точки входа NTRPNT на выбранную целевую точку TRGTP и не будут допускать отклонение от прямолинейного отрезка прямой линии, проходящей от точки входа NTRPNT к целевой точке TRGTP. Таким образом, исключается повреждение пациента, иногда непоправимое повреждение.
Аналогично обеспечивается стопорный элемент 20, или стопор 20 для ограничения глубины несквозного канала BBOR,и для недопущения сверления дальше или глубже, чем требуется, то есть дальше и в сторону от целевой точки TRGTP. Таким образом, в случае несквозных каналов, например, для имплантов, не допускается физическое повреждение тела BDY, повреждение которого иногда является непоправимым.
Медицинское устройство 10 является независимым и не требует внешнего оборудования, поскольку выполнено для работы, например, без помощи устройств визуализации и/или компьютерных процессоров, работающих со специализированными компьютерными программами.
Простота механического механизма, механической конструкции и простота использования являются дополнительными превосходными преимуществами медицинского устройства 10, в дополнение к небольшому весу, жесткости и надежности и изготовлению из медицинских практичных подходящих материалов. Такие материалы могут включать в себя металлы, пластики и синтетические материалы. Кроме того, изготовление медицинского устройства 10 может обеспечиваться посредством традиционных процессов производства.
Краткое описание чертежей
Неограничивающие варианты осуществления изобретения описаны со ссылкой на нижеприведенное описание примерных вариантов осуществления совместно с чертежами. Чертежи в целом представлены не в масштабе, и любые измерения предназначены только для примера и необязательно являются ограничивающими. На чертежах идентичные конструкции, элементы или части, которые имеются более, чем на одном чертеже, предпочтительно обозначены одним и тем же или похожим номером ссылочной позиции на всех чертежах, на которых они имеются, и на которых:
Фиг. A - C и фиг. D представляют, соответственно, проблему и решение,
Фиг. 1 - схематическое поперечное сечение через верхнюю челюсть,
Фиг. 2 - медицинское устройство, выполненное в виде механического механизма,
Фиг. 3 иллюстрирует направляющие втулки,
Фиг. 4 - две плоскости работы механического механизма,
Фиг. 5-7 - альтернативы примерных вариантов осуществления механического механизма,
Фиг. 8-19 - примерные варианты осуществления контактного модуля и контактного блока,
Фиг. 20 - стопорный элемент, поддерживаемый механическим механизмом,
Фиг. 21 - стопорный элемент 21,
Фиг. 22 - использование медицинского устройства 10 и
Фиг. 23 - конструкционное медицинское устройство 310.
Описание вариантов осуществления
С целью иллюстрации примерной проблемы сделана отсылка к зубной хирургии, например, к имплантации внутрисинусального скулового импланта ZI.
Фиг. 1 представляет поперечное сечение через верхнюю челюсть MAX. Поперечное сечение выполнено по оси X фиксирующего канала ANCBR, просверленного для имплантации интрасинусального скулового импланта ZI. Гребень альвеолярного отростка ALVRG не имеет зубов THT, которые, однако, представлены пунктирными линиями.
На фиг. 1 на профильной линии P точка A и точка C ограничивают пределы фиксирующего канала ANCBR. Обе точки - и A, и C - расположены на оси X. Передняя точка A обозначает точку входа NTRPNT фиксирующего канала ANCBR, при этом точка входа располагается на альвеолярном отростке ALVRG. Скуловая имплантaция как вмешательство требует обычно сверления несквозного канала BBOR, который обычно начинается посредством сверления по меньшей мере одного предварительного канала PRLMBR, с последующим образованием канала для фиксации импланта ANCBR. Несквозной канал BBOR обычно начинается от точки входа NTRPNT в передней точке A, проходит через верхнечелюстную пазуху MXSNS и заканчивается в целевой точке TRGPT, недалеко от выхода из скуловой кости Z.
На фиг. 1 задняя точка C обозначает целевую точку TRGPT в скуловой кости Z, при этом целевая точка может не выходить наружу. Выход за пределы скуловой кости Z означает протыкание лица пациента. Точка C достигается после того как сверло 193 для фиксирующего канала прошло от альвеолярного отростка ALVRG внутрь и через верхнечелюстную пазуху MXSNS и просверлило фиксирующий канал ANCBR в скуловой кости Z. Задняя точка C покрыта тканью TSS и кожей SKN лица и, очевидно, расположена на оси X фиксирующего канала ANCBR. Ось X проходит от передней точки A через верхнечелюстную пазуху MXSNS, пересекает заднюю точку C и далее продолжает идти через ткань TSS и кожу SKN на наружную сторону лица, таким образом, к наружной стороне тела BDYEX, через место EMPL, выбранное пользователем.
Пользователем является, в целом, хирург или врач, например, хирург-стоматолог или хирург-ортопед, но медицинское устройство 10, которое представляет собой также устройство 10 для ориентации сверла, может также использоваться другими практикующими врачами.
Именно пользователь выбирает расположение места EMPL на коже SKN лица для определения ориентации оси X, что означает выбор ориентации фиксирующего канала ANCBR. Прямолинейный отрезок линии, проходящей от передней точки A к выбранному месту EMPL будет, таким образом, также проходить через заднюю точку C. Таким образом, ось X задает ось фиксирующего канала ANCBR, и, таким образом, также, пространственную ориентацию скулового импланта ZI.
Механический механизм
Фиг. 2 схематично иллюстрирует примерный вариант осуществления медицинского устройства 10, выполненного как механический механизм 11, включающий в себя первый участок 12 устройства и второй участок 14 устройства, которые взаимно соединены для движения относительно друг друга. На фиг. 2 относительное движение представлено как скользящее движение, но альтернативно, относительное движение может быть отличным от скользящего, и механический механизм 11 может включать в себя один или более подшипников, сцеплений, шарниров, петель или их сочетания.
Каждый из первого и второго участков, соответственно, 12 и 14, может быть образован как конструкция, имеющая в целом форму прямоугольной рамки. Рамка может быть изготовлена из набора первых рамочных элементов 120, образующих контур первого участка 12, и набора вторых рамочных элементов 140 с образованием контура второго участка 14. В собранном виде первая рамка 12 и вторая рамка 14 могут работать во взаимно относительно двунаправленном поступательном перемещении, и как по существу плоский механизм. По существу плоский означает в данном случае, что плоскость не является геометрической плоскостью, но имеет некоторую толщину, поскольку, на самом деле, первые рамочные элементы 120 и вторые рамочные элементы 140 являются трехмерными. Со ссылкой на набор правосторонних декартовых координат, представленный на фиг. 2, первый участок 12 и второй участок 14 располагаются в плоскости x-z. Первый участок 12 и второй участок 14 могут поступательно перемещаться в одной и той же плоскости в прямом и обратном направлении по оси x.
В описании термины «выше», «над», «верхний» и их синонимы относятся к положительным значениям вдоль оси z, а термины «ниже», «под», «нижний» и их синонимы относятся к отрицательным значениям вдоль оси z.
Первый участок 12 может иметь в целом форму прямоугольника, образованного четырьмя первыми прямыми элементами 121, которые включают в себя по меньшей мере два параллельных первых поперечных элемента 122, а именно первый верхний поперечный элемент 123 и первый нижний поперечный элемент 124.
Перпендикулярно первым поперечным элементам 122 первый участок 12 может иметь два параллельных первых продольных элемента 125, а именно первый малый продольный элемент 126, более короткий по сравнению с более длинным первым большим продольным элементом 127. На фиг. 2 два первых поперечных элемента 122 представлены параллельными оси набора координат, а два первых продольных элемента 125 параллельны оси z.
Аналогично первый большой продольный элемент 127 имеет первый дополнительный участок 128 и может, таким образом, быть длиннее первого малого продольного элемента 126 на первый дополнительный участок.
Как дополнительно описано здесь и далее, первая рамка 12 может включать в себя две пары расположенных поперечно линейных подшипников 13 или втулок 13, ось которых параллельна оси x, как, например, цельные втулки 13. Каждый из продольных элементов 125 может поддерживать соединение линейных подшипников 13 скольжения, которые располагаются на нем на расстоянии друг от друга и параллельно друг другу и оси x.
Каждый подшипник 13 скольжения из пары подшипников 13 скольжения, опирающихся на первые продольные элементы 126, совмещен по оси с расположенным напротив подшипником 13 скольжения. Таким образом, пара подшипников 13 скольжения, расположенных на более длинном первом большом продольном элементе 127, соосно совмещена с парой подшипников 13 скольжения, расположенных напротив на более коротком первом малом продольном элементе 126. Очевидно, подшипники 13 скольжения выбираются так, чтобы садиться со скольжением на вторые поперечные элементы 142.
Второй участок 14 также может иметь в целом форму прямоугольника, образованного четырьмя вторыми прямыми элементами 141, включающими в себя по меньшей мере два параллельных вторых поперечных элемента 142, а именно, второй верхний поперечный элемент 143 и второй нижний поперечный элемент 144. Перпендикулярно вторым элементам 142 второй участок 14 может иметь два вторых параллельных продольных элемента 145, а именно второй малый продольный элемент 146 и более длинный по сравнению с ним второй большой продольный элемент 147.
На фиг. 2 два вторых поперечных прямых элемента 143 представлены расположенными параллельно оси x системы координат, а два продольных прямых элемента 145 параллельны оси z.
Кроме того, второй большой продольный элемент 147 имеет второй дополнительный участок 148 и может, таким образом, быть длиннее второго малого продольного элемента 146 на величину этого второго дополнительного участка.
Фиг. 3 схематично иллюстрирует две из четырех направляющих втулок 13, установленных на первом большом продольном элементе 127. На фиг. 2 для соединения второго участка 14 с первым участком 12 каждый из двух вторых поперечных элементов 142, которые были заранее соединены со вторым большим продольным элементом 147, может быть вставлен в надлежаще установленные и разнесенные втулки 13, расположенных на обоих первых продольных элементах 125. Расстояние 12D между осями 131 втулок 13, установленных на продольном элементе 125, равно расстоянию 14D между осями 142X двух вторых поперечных элементов 142, расположенных параллельно оси z системы координат, представленной на фиг.2. Таким образом, второй малый продольный элемент 146 может соединяться с обоими вторыми поперечными элементами 142 с образованием второго участка 14. Следует заметить, что когда обеспечивается стопорный элемент 20, этот последний может быть установлен, например, на одном из двух вторых поперечных элементов 142 до вставки через первый набор втулок 13.
Как только два вторых поперечных элемента 142, представленных на фиг. 2, выходят из двух втулок 13, поддерживаемых первым большим продольным элементом 127, второй малый продольный элемент 146, представленный на фиг. 2, может быть неподвижно соединен со вторыми поперечными элементами 142 с образованием второго участка 14 внутри жесткой замкнутой конструкции из четырех вторых прямых элементов 141. Поскольку втулки 13 поддерживаются в соосном зацеплении со вторыми поперечными элементами 142, первый участок 12 и второй участок 14 могут свободно скользить в двунаправленном поступательном движении относительно друг друга. Однако второй участок 14 остается в первом участке 12 и имеет ограниченную свободу поступательного движения для перемещения. Другими словами, когда второй участок 14 медицинского устройства 10 скользит в направлении первого участка 12, в направлении положительных значений оси x системы координат, представленной на фиг. 2, второй большой продольный элемент 147 будет задерживаться первым малым продольным элементом 126 первого участка 12. Когда первый участок 12 скользит от второго участка 14, таким образом, расширяя медицинское устройство 10, второй малый продольный элемент 146 второго участка 14 будет задерживать первый большой продольный элемент 127 первого участка 12. Как описано ниже, по меньшей мере один стопорный элемент 20 поступательного перемещения может быть регулируемым образом прикреплен ко второму поперечному элементу 142 для точного ограничения диапазона поступательного перемещения второго участка 14 относительно первого участка 12.
На фиг. 2 представлено, что второй дополнительный участок 148, который представляет собой продолжение второго большого продольного элемента 147, располагается параллельно длине первого дополнительного участка 128, который является продолжением первого большого продольного элемента 127. Первый и второй дополнительные участки, соответственно 128 и 148, надлежаще располагаются в одной и той же плоскости, но взаимно противоположны друг другу, как для поступательного движения друг к другу, так и поступательного движения друг от друга. Другими словами, второй дополнительный участок 148 может быть поступательно сдвинут в первом направлении от первого дополнительного участка 128 для увеличения и расширения медицинского устройства 10. Для возврата и уменьшения медицинского устройства 10 второй дополнительный участок 148 поступательно перемещается во втором направлении, противоположном первому направлению.
Как представлено на фиг. 4, такое расширение или уменьшение может происходить в первой плоскости 1PL, общей для первого участка и второго участка, соответственно 12 и 14, и во второй плоскости 2PL, общей для первого и второго дополнительных участков, соответственно 128 и 148. Вторая плоскость 2PL может располагаться под заданным углом α относительно первой плоскости 1PL, при этом угол α может быть фиксированным или регулируемым.
Альтернативные механические механизмы
Фиг. 5, 6 и 7 - схематические изображения альтернативных примерных вариантов осуществления из многих возможных вариантов осуществления механического механизма 11.
Фиг. 5 иллюстрирует механический механизм 11, в котором, по сравнению с фиг. 2, имеется одно отличие, состоящее в том, что второй участок 14 поддерживает подшипники 30. Фиг. 6 отличается от фиг. 2 тем, что первый и второй рамочные элементы, соответственно 120 и 140, располагаются перпендикулярно и симметрично относительно первого и второго дополнительных участков, соответственно 124 и 128. На фиг. 7 механический механизм 11 выполнен как двойной плоский стержне-шарнирный механизм, при этом шарниры имеют только одну степень свободы движения.
Контактный модуль
Как представлено на фиг. 2, первый дополнительный участок 128 поддерживает контактный модуль 15, обращенный ко второму дополнительному участку 148, который поддерживает рабочий модуль 16. Контактный модуль 15 имеет контактный элемент 151, предназначенный для осуществления контакта с участком тела BDY, например, с лицом. Термин «тело» BDY относится к человеку или животному, при этом тело BDY может включать в себя ткань TSS, кожу SKN и кости BNE, на одном из которых может располагаться контактный элемент 151. Альтернативно контактный элемент 151 может располагаться на вспомогательном элемент 157, представлено на фиг. 9, и может прикрепляться к телу BDY и находиться в контакте с телом BDY, например, при помощи ассистента или посредством использования ременного или шлемообразного устройства. Контактный модуль 15 и контактный элемент 151 может иметь форму соответственно имеющемуся медицинскому случаю, а также подходящую для работы и комфорта при удержании в руках пользователя.
На фиг. 2 медицинское приспособление 19, поддерживаемое рабочим модулем 16, представлено расположенным соосно оси X и направлено на контактный модуль 15. Медицинское приспособление 19, таким образом, расположено соосно и нацелено на контактный элемент 151, или на контактную точку 154, или на место EMPL, выбранное пользователем. Однако хотя медицинское приспособление 19 постоянно нацелено на определенное пользователем и выбранное место EMPL, контактный элемент 151 не всегда находится в непосредственном физическом контакте с местом EMPL, как описано ниже,
На фиг. D медицинское приспособление 19 изображено в рабочем положении на теле BDY. Ось 10X медицинского приспособления 19 на фиг. D совпадает с осью X, представленной на фиг. A, при этом указанная ось проходит от точки входа NTRPNT через целевую точку TRGPT к выбранному месту EMPL. Продольная ось 199 медицинского приспособления 19 направлена на шиповидныый контактный элемент 151, который должен располагаться на выбранном месте EMPL. Кончик шипа 152 представляет собой контактную точку 154, расположенную на оси X, при этом указанная контактная точка является общей с выбранным местом EMPL. Таким образом, ориентация, выбранная пользователем на прямом отрезке линии от точки входа NTRPNT до контактной точки 154, точно определена. Такая точность ориентации позволяет пользователю сверлить несколько расположенных рядом непересекающихся каналов, проходящих от различных точек входа NTRPNT до соответствующих выбранных мест EMPL, и более того, без опасности пересечения этих каналов. Пользователь, таким образом, обеспечивается ориентацией(ями) для каналов, которые он сам выбрал в качестве безопасных для операции. Термин «безопасный» означает «не вызывающий повреждения органов анатомии тела BDY».
Таким образом, с помощью кончика 198 медицинского приспособления 19 на точке входа NTRPNT и кончика 153 шипа 152 на выбранном месте EMPL медицинское устройство 10 располагается надлежащим образом. Например, когда медицинское устройство 10 надлежаще расположено пользователем, оно точно нацелено для направления и ориентации медицинского приспособления 19 в направлении, вдоль которого, например, может быть безопасно просверлен имплантационный канал IMPBR.
Контактный модуль 15 может быть выполнен согласно типу хирургического вмешательства или согласно выбранному месту EMPL, или соответственно вспомогательному элементу 157, к которому будет закрепляться контактный элемент 151, или также в зависимости от медицинских условий. Кроме того, форма контактного элемента 151 может быть индивидуализирована согласно пожеланию или необходимости. Кроме того, легкость манипулирования или удержания контактного элемента 151 может увеличиваться за счет присоединения к нему специального манипуляционного устройства, непредставленного на чертежах.
Ниже со ссылкой на фиг. 8-19 описаны схематические примерные иллюстрации некоторых примерных вариантов осуществления контактного модуля 15, который может располагаться на свободном концевом участке 1281 первого дополнительного участка 128.
На фиг. 8 и 9 проиллюстрирован контактный элемент 151, расположенный на свободном конце 1281 дополнительного участка 128 или вблизи него. Контактный элемент 151 может быть выполнен в виде шипа 152, который может быть подходящим, в частности, для использования медицинского устройства 10 на кости BNE. При расположении на выбранном месте EMPL тела BDY кончик 153 шипа 152 определяет контактную точку 154, которая совпадает и с кончиком 153 шипа и с местом EMPL.
На фиг. 10 и 11 изображен контактный элемент 151, выполненный в виде контактного шара 155, который осуществляет контакт с телом BDY в контактной точке 154. Хотя это не представлено на чертежах, вместо контактного шара 155 может обеспечиваться выполненный в виде полусферы контактный элемент 151, который может действовать как контактный шар 155. Аналогично, в качестве контактных элементов 151 могут также использоваться пространственные симметричные элементы, подобные эллипсоидам или полусферам, хотя это не представлено на чертежах. На фиг. 12 представлено примерное частичное поперечное сечение вспомогательного элемента 157, который располагается между контактным шаром 155 и выбранным местом EMPL, на которое нацелена ось 199 медицинского приспособления 19. Контактный шар 155 не располагается на выбранном месте EMPL и не находится в контакте с выбранным местом EMPL. Однако пользователь может визуально обнаружить и идентифицировать выбранное место EMPL, которое он определил и, необязательно, отметил через открытое отверстие 1510, которое проникает во вспомогательный элемент 157. Это задача пользователя - надлежаще расположить вспомогательный элемент 157 на теле BDY в продолжение оси X, проходящей от точки входа NTRPNT к выбранному месту EMPL.
На фиг. 13 изображено открытое отверстие 1510, или окно 159 для пальца, или отверстие 1531 для пальца, которое расположено в свободном концевом участке 1281 первого дополнительного участка 128. Открытое отверстие 1510 выбирается так, чтобы при расположении на месте EMPL кончик пальца FNGRTP мог пройти через него так, чтобы создать ручной тактильный контакт с кончиком пальца FNGRTP в качестве контактной точки 154, которая совпадает с местом EMPL. Перед вставкой кончика пальца FNGRTP в открытое отверстие 1510 открытое отверстие 1510 обеспечивает визуальную проверку и изучение места EMPL. Место EMPL может быть заранее обозначено меткой MRK.
На фиг. 14 изображен свободный концевой участок 1281 дополнительного участка 128, к которому для примера неподвижно фиксирован контактный элемент 151, скажем, посредством высвобождаемых механических крепежных средств 160 или фиксаторов, или посредством других таких средств, известных специалисту в данной области техники. Как правило, в целом для контактных элементов 151 съемный контактный элемент 158 может быть съемным, заменяемым и сменным на другие различные контактные элементы. Кроме того, контактный элемент 151 имеет окно 159 для пальца, например, открытое отверстие 1510, круглое или нет, через которое кончик пальца FNGRTP может пройти как раз настолько, чтобы дотронуться и прощупать выбранное место EMPL. Контактная точка 154, на центре окна 159 для пальца или открытого отверстия 1510, является общей с местом EMPL. Продольная ось 199 медицинского приспособления 19, таким образом, нацелена на выбранное место EMPL, которое может быть обнаружено и ощупано через окно 159 для пальца.
Следует заметить, что для шипа 153 кончик 153 шипа 152 определяет контактную точку 154, которая должна располагаться на выбранном пользователем месте EMPL. Однако, например, когда контактный элемент 151 выполнен как контактный шар 155, контактная точка 154 шара 155 не ограничена одной единственной точкой на поверхности контактного шара 155. Несмотря на это, физическая контактная точка на теле BDY должна быть выбранным местом EMPL.
На фиг. 15 и 16 представлен частичный поперечный разрез схематического примерного варианта осуществления контактного элемента 151, образованного как шарнирный механизм 1511, имеющий по меньшей мере три степени свободы вращения для обеспечения повышенной легкости использования. Фиг. 16 представляет собой частичный поперечный разрез вида сбоку, выполненного по плоскости A-A, представленной на фиг. 15. Шарнирный механизм 1511 может соединяться со свободным концевым участком 1281 первого дополнительного участка 128, или с соединенным с ним соединительным элементом 1515, который соединен с ним опосредованно. Главным образом, шарнирный механизм 1511 может включать в себя сердечник 1512, шатун 1513 и опору 1514 для пальца. Сердечник 1512 шарнирного механизма 1511 может, таким образом, быть соединен с первым дополнительным участком 128 или промежуточным соединительным элементом 1515.
На фиг. 15 канавка 1521, расположенная в плоскости x-y системы координат, вырезана или в первом участке 128 или в промежуточном соединительном элементе 1515. Канавка обеспечивает свободную посадку скольжения для свободного конца 1516 по меньшей мере трех штифтов 1517, которые неподвижно соединены консольно с сердечником 1512. Таким образом, сердечник 1512 может вращаться вокруг оси параллельно или соосно с осью z декартовой системы координат.
На фиг. 15 и 16 один сквозной штифт 1517, неподвижно соединенный с сердечником 1512 и проходящий через сердечник 1512, поддерживает шатун 1513. Сквозной штифт 1517 параллелен оси y декартовой системы координат, ось которой входит в лист бумаги. Концевые участки сквозного штифта 1517 вделаны в сердечник 1512. Как представлено на фиг. 16, средний участок сквозного штифта 1517 пересекает канал 1520. Канал 1520 сердечника разделяет сердечник1512 на две ветки 1527 сердечника, между которыми шатун 1513 поддерживается сквозным штифтом 1517. Средний участок сквозного штифта 1517 зацепляется и проходит в свободной посадке скольжения в искривленном канале 1518, вырезанном в шатуне 1513. Сквозной штифт 1517 располагается на центре кривизны искривленного канала 1518. Таким образом, шатун 1513 может свободно вращаться по часовой стрелке CCW и против часовой стрелки ACCW, от одного конца искривленного канала 1518 к другому концу, как представлено стрелками, обозначенными соответственно CCW и CCW. Шатун 1513 может, таким образом, поворачиваться в пределах диапазона по меньшей мере 120° в плоскости x-z системы координат.
Два плеча 1522 шатуна отходят от искривленного канала 1518, по одному плечу 1522 шатуна от каждого конца искривленного участка 1519, в котором вырезан искривленный канал 1518, и проходят параллельно оси z декартовой системы координат. На свободном конце 1523 плечей 1522 шатуна и между ними опора 1514 для пальца удерживается съемным и заменяемым образом. Опора 1514 для пальца может быть выполнена как шайба 1524, имеющая открытый канал канал 1525 шайбы, центр которого представляет собой контактную точку. Шайба 1524 неподвижно соединена с двумя соосно совмещенными и диаметрально противоположными штифтами 1526. Каждый штифт 1526 поддерживается с возможностью вращения для вращения посредством свободного конца 1523 каждого плеча 1522 шатуна. На фиг. 15 два штифта 1526 представлены расположенными параллельно оси x системы координат. Для замены опоры 1514 для пальца два плеча 1522 шатуна могут быть вручную упруго раздвинуты, опора 1514 для пальца может быть извлечена и может быть заменена другой такой опорой 1514 для пальца. Размер канала 1525 шайбы выбирается так, что при расположении на месте EMPL кончик пальца FNGRTP может проходить через него как раз чтобы создавать тактильный контакт с местом EMPL. Необязательно место EMPL может быть заранее обозначено меткой MRK. Перед вставкой кончика пальца FNGRTP в открытый канал 1525 шайбы опора1514 для пальца позволяет провести визуальную проверку и осмотр места EMPL. Следует заметить, что опоры 1514 для пальца могут быть заменяемыми и доступны в различных размерах и формах для соответствия пользователю, выполняющему вмешательство.
На фиг. 17 представлена альтернатива шайбообразной опоре 1514 для пальца в виде гнездо 1529 для пальца, которое может по существу охватывать кончик FNGRTP пальца, расположенного в нем. Гнездо 1529 для пальца может быть неподвижно соединено с двумя соосно совмещенными и диаметрально противоположными штифтами 1526. Каждый штифт 1526 поддерживается с возможностью вращения для вращения свободным концом 1523 каждого плеча 1522 шатуна. Отверстие 1539 для кончика пальца гнезда 1529 для пальца, которое заключает в себя кончик пальца FNGRTP, может работать таким же образом, что и канал 1525 шайбы. Кончик пальца FNGRTP проходит в гнездо 1529 для пальца через отверстие 1531 для пальца, а центр отверстия 1539 для кончика пальца или открытое отверстие 1510 представляет собой контактную точку 154.
На фиг. 18 изображено наложение поперечного сечения шайбообразной опоры 1514 для пальца и гнезда 1529 для пальца, представляющее, что кончик пальца FNGRTP может рассматриваться в качестве контактной точки 154 и в случае опоры 1514 для пальца, и в случае гнезда 1529 для пальца. Опоры 1514 для пальца и гнезда 1529 для пальца могут быть избирательно взаимозаменяемыми и иметь различные размеры и конфигурации для соответствия пользователю, месту EMPL и типу вмешательства.
Открытый канал 1525 шайбы и отверстие 1539 для кончика пальца гнезда 1529 для пальца являются предпочтительными для осмотра и прикосновения к выбранному месту EMPL. Пользователь может указать выбранное место EMPL посредством наложения на него метки MRK распознавания места, представлено на фиг. 17, например, крестика, точки или кружка с точкой в середине. Такая метка MRK может быть легко обнаружена визуально через открытый канал 1525 шайбы или через отверстие 1539 для кончика пальца гнезда 1529 для пальца. Таким образом, просто расположить центр канала 1525 шайбы или отверстия 1539 для кончика, на метке MRK. Дополнительное преимущество относится к имплантации скулового импланта ZI в скуловую кость Z. Обычно слой ткани TSS и кожи SKN, отделяющий место EMPL от целевой точки TRGTP бывает скорее тонким. Поэтому кончик пальца FNGRTP в опоре 1514 для пальца, расположенной на месте EMPL, может легко ощущать приближение приближающегося работающего моторизованного медицинского приспособления 19. Такое тактильное обнаружение возможно задолго до выхода медицинского приспособления 19 из скуловой кости Z. Пользователь, таким образом, будет способен остановить сверление несквозного канала BBOR, например, когда целевая точка TRGTP достигнута, и не допустить выхода несквозного имплантационного канала IMPBR за пределы целевой точки TRGTP.
Для использования медицинского устройства 10 после предварительных медицинских этапов подготовки сначала выбираются место EMPL и точка входа NTRPNT, и каждая из них может необязательно отмечаться, при необходимости, меткой MRK. Затем контактная точка 154 контактного элемента 151 размещается и жестко удерживается на выбранном месте EMPL, или может быть надлежаще размещена относительно его на оси X и в продолжение оси X, проходящей от точки входа NTRPNT к месту EMPL. Необязательно контактный элемент 151 может удерживаться на месте помощником, который, альтернативно, может удерживать вспомогательный элемент 157, если он не прикреплен к телу BDY, посредством ременного или шлемовидного устройства. Таким образом, подготавливается привод 18 приспособления, как описано ниже, и он связывается с направляющей 17 приспособления.
Рабочий модуль
На фиг. 19 представлен рабочий модуль 16, который соединен со свободным концевым участком 1481 второго дополнительного участка 148 неподвижно, и точно ориентирован в направлении на контактный элемент 151. Рабочий модуль 16 предназначен для поддержания медицинских приспособлений 19 и включает в себя, главным образом, направляющую 17 приспособления и привод 18 приспособления. Направляющая 17 приспособления может соединяться со вторым дополнительным участком 148 или с его внутренней стороной 148a, которая обращена к первому дополнительному участку 128, представленному на фиг. 2, или с его наружным участком 148b, который обращен от первого дополнительного участка 128. Привод 18 приспособления, который может быть выполнен как независимый модуль, связывается для работы с направляющей 17 приспособления и вводится в съемное зацепление с ней с наружной стороны 148b второго дополнительного участка 148.
Как представлено на фиг. 2, направляющая 17 приспособления неподвижно и постоянно нацелена в ориентации, обращенной к контактному модулю 15. Таким образом, продольная ось 199 медицинского приспособления 19, поддерживаемого направляющей 17 приспособления, постоянно располагается соосно совмещенной с осью X, ориентирована в направлении и нацелена на контактную точку 154 контактного элемента 151.
Именно конфигурация механического механизма 11 обеспечивает, что продольная ось 199 медицинского приспособления 19, например, медицинского приспособления 19 или медицинского зубного устройства 19, поддерживаемого направляющей 17 приспособления, остается постоянно совмещенной с контактной точкой 154. Такое совмещение остается правильным и при остановке, и во время взаимного относительного движения между первым участком 12 и вторым участком 14 механического механизма 11. Медицинское устройство 10 обеспечивает, что независимо от пространственного положения и наклона его и рабочего модуля 16, как только контактный элемент 151 располагается на выбранном месте EMPL, и при этом кончик 198 медицинского приспособления 19 находится на точке входа NTRPNT, медицинское приспособление 19 нацелено на целевую точку TRGTP. Другими словами, медицинское приспособление 19 нацелено на контактный элемент 151 или контактную точку 154, которая располагается на месте EMPL, на прямой общей линейной оси X и 10X, которая проходит через точку входа NTRPNT и целевую точку TRGTP, как представлено на фиг. D.
Фиг. 19 иллюстрирует схематический вариант осуществления рабочего модуля 16, представляющий, что направляющая 17 приспособления включает в себя направляющую втулку 172, которая может поддерживать по меньшей мере одну переходную втулку 173. Направляющая втулка 172 может быть неподвижно, но съемно и заменяемым образом соединена со вторым дополнительным участком 148, например, посредством использования резьбы. Направляющая втулка 172 соединяется в соосном совмещении вдоль оси X, которая проходит через контактную точку 154, представленную на фиг. 2, и имеет больший внутренний диаметр 174 входного отверстия направляющей втулки, за которым следует меньший относительно него внутренний диаметр 175 направляющей втулки. Переходная втулка 173 имеет переводный фланец 176 наружного диаметра 177 переходной втулки, который выполнен с возможностью вмещения во больший внутренний диаметр 174 входного отверстия направляющей втулки 172. Кроме того, переходная втулка 173 имеет наружный диаметр 177 переходной втулки, предназначенный для направления и поддержки меньшим по размеру внутренним диаметром 175 направляющей втулки. Кроме того, переходная втулка 173 имеет внутренний диаметр 178 переходной втулки, который может быть приспособлен для направления и поддержки в нем специального медицинского приспособления 19. Направляющая втулка 172 может заменяемым образом вмещать различные переходные втулки 173, каждая из которых может быть приспособлена для направления и поддержания медицинского приспособления 19 конкретного диаметра.
Например, направляющая втулка 172 может иметь меньший внутренний диаметр 175 направляющей втулки номинального размера 6 мм, и может быть подогнана к переходной втулке 173, имеющей внутренний диаметр 178 переходной втулки, выполненный для направления медицинского приспособления 19 диаметром 4,2 мм. Такое медицинское приспособление 19 может представлять собой сверло 183 для фиксирующего канала при скуловой имплантации или скуловой имплант ZI, или медицинский инструмент другого типа. Для сверления предварительного канала PRLBR направляющая втулка 172 может быть приведена в соответствие с переходной втулкой 173, имеющей внутренний диаметр 178 переходной втулки, соответствующий диаметру предварительного сверла 192, скажем, диаметром 2,8 мм. Различные медицинские приспособления 19 могут поддерживаться рабочим модулем 16 для получения преимущества, заключающегося в хорошем нацеливании на целевую точку TRGPT, в частности, когда целевая точка TRGPT скрыта от взгляда, например, в случае скулового импланта ZI или при сверлении несквозного канала BBOR.
На фиг. 16 также изображен привод 18 приспособления, который приводится в действие с наружной стороны 148b второго дополнительного участка 148. Рабочее устройство 180 может включать в себя медицинское приспособление 19, подлежащее приведению в действие двигателем или приводимым в действие вручную. Рабочее устройство 180 может, таким образом, включать в себя механизированный привод 181, например, удерживаемый в руке наконечник 182, к которому присоединяется медицинское приспособление 19.
При использовании направляющую 17 приспособления может быть необходимо подогнать к диаметру зубного приспособления 19, поддерживаемому приводом 18 приспособления. Однако, если это целесообразно, может использоваться номинальный внутренний диаметр направляющей втулки 172. Затем переходная втулка 173 вводится через больший по размеру внутренний диаметр 174 направляющей втулки 172 в относительно меньший, по сравнению с ним, направляющий внутренний диаметр 175. Введение переходной втулки 173 останавливается посредством ступеньки 179 направляющей втулки, которая располагается внутри большего внутреннего диаметра 174 направляющей втулки 172. И, наконец, медицинское приспособление 19, или соединенное с наконечником 182 или управляемое вручную, вводится во внутренний диаметр 178 переходной втулки или в меньший по размеру внутренний диаметр 175 направляющей втулки и выводится из него.
Стопорный элемент
На фиг. 2 представлен ограничивающий движение элемент 20, расположенный на втором верхнем поперечном элементе 143. Стопорный элемент 20 предназначен для остановки движения в одном направлении посредством упора в первый малый продольный элемент 126. Хотя это не представлено на чертежах, ограничивающий движение стопорный элемент 20 может быть установлен на втором нижнем поперечном элементе 144. Кроме того, стопорный элемент 20 может располагаться но обоих вторых поперечных элементах 141.В целом, останавливающий движение стопорный элемент 20 останавливается при упоре в первый продольный элемент 125. Альтернативно, дополнительный второй боковой стопорный элемент 201 может прикрепляться ко второму участку 14 для поддержания стопорного элемента 20, как представлено на фиг. 20. Ограничивающий движение стопорный элемент 20, расположенный на втором поперечном элементе 142 или на дополнительном стопорном элементе 201, может регулироваться вручную посредством грубой регулировки или тонкой регулировки. Предпочтительно стопорный элемент 20 приспособлен и для грубой, и для тонкой регулировки.
На фиг. 20 схематично изображен примерный вариант осуществления механического механизма 11, имеющего дополнительный стопорный элемент 201, имеющий круглое поперечное сечение, расположенный параллельно первому и второму поперечным элементам, соответственно 122 и 142. Предпочтительно стопорный элемент 201 представляет собой стержень с резьбой. Один конец стопорного элемента 201 соединен со вторым малым продольным элементом l46, а другой конец соединен со вторым большим продольным элементом 147. Проходы 202, открытые в оба первых продольных элемента 125, обеспечивают свободное перемещение через стопорный элемент 201. Стопорный элемент 20 представлен опирающимся на стопорный элемент 201, расположенный между первым малым продольным элементом 126 и вторым большим продольным элементом 147.
Фиг. 21 представляет собой схематическую иллюстрацию частичного поперечного разреза примерного варианта осуществления регулируемого ограничивающего движение стопорного элемента 20, или, для краткости, стопора 20. Стопор 20 предназначен для остановки движения второго участка 14 относительно первого участка 12, таким образом, рабочего модуля 16, в направлении контактного модуля 15, и наоборот. Стопор 20 позволяет пользователю выбирать желательное продольное расстояние разделения 210, или промежутка разделения 210, представленного на фиг. 2, между кончиком 198 медицинского приспособления 19 и контактным элементом 151, посредством точного регулирования размещения стопора 20. Выбранное продольное расстояние 210 может, таким образом, устанавливаться как ограничение, за пределами которого взаимное относительное движение между рабочим модулем 16 и контактным модулем 15 невозможно уменьшить. Например, при помощи контактного модуля 15, прочно закрепленного на месте EMPL, и при помощи кончика 198 медицинского инструмента 19, например, медицинского сверла 194, расположенного на точке входа NTRPNT, выбранное ограничивающее движение положение стопора 20 обеспечивает пользователю возможность сверления несквозного канала BBOR до выбранного пользователем ограничения длины канала, но не дальше или не глубже. Посредством надлежащего регулирования ограничивающего движение стопора 20 пользователь, таким образом, может безопасно сверлить несквозной канал BBOR точно на заданную глубину, при этом глубина сверления может ограничиваться так, чтобы не заходить за целевую точку TRGPT.
На фиг. 21 представлен стопор 20, подлежащий размещению, например, на резьбовом боковом стопорном элементе 201, имеющем маленький шаг резьбы. Подпружиненный поршень 203 поддерживает лезвие 204, которое вдвигается между нитками резьбы стопорного элемента 201 посредством упругого элемента 205. Упругий элемент 205, например, цилиндрическая пружина 205, имеет первый конец, который упирается в нижний участок поршня 203. Второй конец упругого элемента 205 упирается во внутреннее дно стакана 206.
Стакан 206 “висит” на боковом стопорном элементе 201, который проходит через него посредством обеспеченных в нем двух диаметрально противоположных отверстий 211 стакана. Отверстия 211 стакана могут быть выполнены как продольные прорези, предназначенные для свободного прохода в них стопорного элемента 201. Толкатель 209, который поддерживает кнопку 207, устанавливается на поршень 203. Когда на кнопку 207 нажимают для воздействия на толкатель 209 и затем на поршень 203, чтобы надавить на упругий элемент 205, две диаметрально противоположные прорези 213 толкателя могут совмещаться с двумя диаметрально противоположными отверстиями 211стакана, чтобы поперечный стопорный элемент 201 прошел и через прорези стакана, и через прорези толкателя, соответственно через 211 и 213.
С помощью лезвия 204, зацепленного с резьбовым стопорным элементом 201, легко вручную вращать стопор 20 вокруг стопорного элемента 201. При каждом полном повороте стопора 20 лезвие 204 перемещается на расстояние, равное шагу резьбы поперечного стопорного элемента 201. Для точности и тонкой регулировки стопора 20 может быть предпочтительна резьба, имеющая небольшой шаг, от 0,5 мм до 1 мм.
Для перемещения стопора 20 при грубой регулировке посредством поступательного перемещения вдоль поперечного стопорного элемента 201, которая может быть быстрее, чем посредством поворота при тонкой регулировке, кнопка 207 нажимается для давления на толкатель 209 и поршень 203, которые при надавливании выводят лезвие 204 из зацепления с резьбой резьбового стопорного элемента 201. Две диаметрально противоположные открытые прорези 213 толкателя, обеспеченные в толкателе 209, обеспечивают проход через них поперечного стопорного элемента 201, и далее обеспечивают перемещение толкателя 209 перпендикулярно и в направлении поперечного стопорного элемента 201. Поэтому, когда толкатель 209 нажат, толкатель 209 давит на поршень 203, который, в свою очередь, сжимает пружину 205. Таким образом, лезвие 204 выходит из зацепления с резьбой стопорного элемента 201, и стопор 20 может быть поступательно перемещен в двух направлениях для грубой регулировки положения.
Предпочтительно стопор 20 обеспечивает две функции: точную регулировку выбранного продольного расстояния 210 посредством поворота вокруг стопорного элемента 201, а также грубую регулировку и более быстрое перемещение в поступательном перемещении вследствие нажатия толкателя 209 и скользящего перемещения вдоль стопорного элемента 201.
Для сборки стопора 20 упругий элемент или пружина 205 вводятся в стакан 206, а на него устанавливается поршень 203, и на расстоянии от пружины 205 устанавливается лезвие 204. Затем на поршень 203 устанавливается толкатель 209. Затем, посредством толкания кнопки 207 толкатель 209 прижимается к подпружиненному поршню 203. При необходимости кнопка 207 может поворачиваться для достижения совмещения двух диаметрально противоположных прорезей 213 толкателя с двумя диаметрально противоположными прорезями 211 стакана. Затем стопорный элемент 201 проходит через совмещенные отверстия 213 толкателя и отверстия 211 стакана, и затем кнопка 207 высвобождается, чтобы обеспечить зацепление лезвия 204 с резьбой стопорного элемента 201.
Использование медицинского устройства 10
Как описано в Википедии в Интернете в статье "Скуловой имплант", скуловые импланты ZI используются для стоматологической реабилитации, когда в верхней челюсти имеется недостаточное количество кости BNE. Медицинское устройство 10 может использоваться и для внутричелюстной и для внечелюстной скуловой имплантaции. Пример, упрощенный для использования описания внутричелюстной имплантации, и для использования медицинского устройства 10 в сравнении направленной и ненаправленной обычной имплантации описан ниже со ссылкой на фиг. 1 и 22.
На фиг. 22 представлена упрощенная и краткая иллюстрация примерного использования медицинского устройства 10 для внутричелюстной скуловой имплантaции ZI со ссылкой на фиг. 1. Сначала второй участок 14 медицинского устройства 10 отдаляется от первого участка 12. Затем образуется рабочий модуль 16 посредством присоединения к нему привода 18 приспособления, который поддерживает зубное приспособление 19, соединенное с наконечником 182 и приводимое в действие наконечником 182. Может использоваться переходная втулка 173. Положение стопора 20 регулируется. Контактный элемент 151 контактного модуля 15 располагается на лице пациента, на коже SKN напротив скуловой кости Z, на которой пользователь уже выбрал место EMPL посредством ручного ощупывания. С помощью контактного элемента 151 на месте EMPL и кончика 198 зубного приспособления 19 на точке входа NTRPNT, как представлено на фиг. 1, наконечник 182 просверливает несквозной канал. Несквозной канал BBOR просверливается до остановки стопором 20 и/или посредством обнаружения ощупыванием пальцем приближения сверла 194. Затем наконечник 182 выводится из направляющей 17 приспособления. И, наконец, может использоваться вставленное вручную и закрепленное зубное приспособление 19, необязательно посредством направляющей 17 приспособления, для завершения имплантации.
Следует заметить, что использование медицинского устройства 10 не допускает разночтений, связанных со свободным ручным ненаправленным направлением ориентации и глубиной сверления канала.
Механическая конструкция
Фиг. 23 схематично иллюстрирует дополнительный примерный вариант осуществления медицинского устройства 10 в качестве структурного медицинского устройства 310, выполненного в виде цельной механической конструкции 311. В отличие от механического механизма 11, описанного выше в настоящем документе, механическая конструкция 311 может быть изготовлена как единый жесткий и надежный блок, то есть один кусок материала, включающий в себя контактный блок 315 и направляющий блок 316. Механическая конструкция 311 включает в себя первый структурный участок 312 и второй структурный участок 314, которые взаимно жестко соединены вместе третьим структурным участком 313 с образованием жесткой, в целом дугообразной формы.
Структурное медицинское устройство 310 может быть изготовлено из подходящих для медицинского использования материалов, которые могут включать в себя металлы, пластики и синтетические материалы. Изготовление структурного медицинского устройства 310 может обеспечиваться посредством традиционных производственных процессов, включающих в себя аддитивную печать, каковые процессы хорошо известны специалистам в данной области техники. Структурное медицинское устройство 310 может быть изготовлено различных размеров и форм, из которых может быть выбрано одно структурное устройство 310 надлежащего размера и формы для конкретной медицинской процедуры.
В описании термины «вверх», «над», «верхний» и их синонимы относятся к положительным значениям по оси z, а термины «вниз», «под», «нижний» и их синонимы относятся к отрицательным значениям по оси z.
Как представлено на фиг. 23, первый структурный участок 312 поддерживает контактный блок 315, обращенный к направляющему блоку 316, который поддерживается вторым структурным участком 314. Контактный блок 315 может быть идентичен или аналогичен одном из вариантов осуществления контактного блока 15, описанного со ссылкой на фиг. 8-14 для механического механизма 11. Контактный блок 315 имеет контактный элемент 3151 для обеспечения контакта с наружным участком тела BDY, например, лицом. Термин «тело» BDY означает принадлежность к живому существу, при этом тело BDY может включать в себя ткань TSS, кожу SKN и кости BNE, на которых может располагаться один из контактного элемента 151 или 3151. Альтернативно, контактный элемент 3151 может располагаться на вспомогательном элементе 157, как представлено на фиг. 12. Вспомогательный элемент 157 может удерживаться в контакте с телом BDY, например, с помощью ассистента или ременного или шлемовидного устройства, но это не представлено на чертежах. Контактный блок 315 и контактный элемент 3151 могут иметь форму согласно требованиям имеющегося медицинского случая, а также для легкости работы и комфортного удержания в руках пользователем. При необходимости контактный элемент 3151, идентичный или аналогичный таковому в вариантах осуществления контактного модуля 15, описанного выше со ссылкой на фиг. 14-18 для механического механизма 11, может использоваться на первом конце 3121 первого структурного участка 312.
На фиг. 23 направляющий блок 316 для поддержания и направления зубных приспособлений 19 включает в себя направляющую трубку 3161, представленную расположенной соосно совмещенной вдоль оси X и нацеленной на контактный блок 315. Медицинские приспособления 19, таким образом, нацелены в осевом направлении на контактный элемент 3151, или контактную точку 3154, или место EMPL, выбранное пользователем для расположения на нем контактного блока 315. Однако, хотя медицинское приспособление 19 постоянно нацелено на определенное пользователем и выбранное место EMPL, контактный элемент 151 не всегда находится в прямом физическом контакте с местом EMPL, как описано ниже.
На фиг. D изображено медицинское приспособление 19 в рабочем расположении на теле BDY. Продольная ось 199 медицинского приспособления 19 совпадает с осью X, представленной на фиг. A, проходящей от точки входа NTRPNT через целевую точку TRGPT к выбранному месту EMPL. Продольная ось 199 медицинского приспособления 19 нацелена на шиповидный контактный элемент 151 или 3151, расположенный на выбранном месте EMPL. Кончик 3153 шипа 152 или 3152 представляет собой контактную точку 154, расположенную на оси X. Таким образом, направление ориентации, выбранное пользователем на прямом отрезке линии, проходящей от точки входа NTRPNT к контактной точке 154, точно определяется. Такая точность ориентации позволяет пользователю сверлить множество расположенных рядом друг с другом непересекающихся каналов. Пользователь, таким образом, обеспечивается ориентацией(ями) каналов, которые он сам выбрал в качестве безопасных для вмешательства. Безопасность означает отсутствие опасности повреждения органов и анатомии тела BDY. Таким образом, с помощью кончика 198 медицинского приспособления 19, расположенного на точке входа NTRPNT, и кончика шипа 152 или 3152, расположенного на выбранном месте EMPL, медицинское устройство 10 располагается надлежащим образом. Например, когда надлежаще расположенное пользователем медицинское устройство 10 и структурное медицинское устройство 310 точно нацелены на точно направленное и ориентированное медицинское приспособление 19 в направлении, вдоль которого может быть безопасно просверлен несквозной канал BBOR, например, имплантационный канал IMPBR. Контактный блок 315 может быть выполнен согласно типу хирургического вмешательства и/или согласно выбранному месту EMPL на участке тела BDY, к которому прикреплен контактный элемент 151 или 3151, или к вспомогательному элементу 157 или 3157. Кроме того, форма контактного элемента 151 или 3151 может быть индивидуализирована согласно желанию или необходимости. Кроме того, легкость манипулирования или удержания контактного элемента 3151 может быть улучшена посредством соединения с ним специального устройства для легкого манипулирования, которое не представлено на чертежах.
Ниже коротко описаны со ссылкой на фиг. 8-19 схематические иллюстрации нескольких примерных вариантов осуществления контактного блока 315, который может располагаться на первом структурном участке 312.
На фиг. 8 и 9 проиллюстрирован контактный элемент 151 или 3151, выполненный в виде шипа 152 или 3152, который может подходить, в частности, для использования медицинского устройства 10 на кости BNE. При расположении на выбранном месте EMPL тела BDY кончик 153 или 3153 шипа 152 определяет контактную точку 154 или 3154, совпадающую с кончиком 153 или 3153 шипа.
На фиг. 10 и 11 изображен контактный элемент 151 или 3151, выполненный в виде контактного шара 155, выполняющего контакт с телом BDY в контактной точке 154 или 3154. Контактный элемент 151 или 3151, заканчивающийся как полусфера, может быть также эффективен, как контактный шар 155.
На фиг. 12 представлен примерный частичный поперечный разрез вспомогательного элемента 157, расположенного между контактным шаром 155 и выбранным местом EMPL, на которое нацелена продольная ось 199 медицинского приспособления 19. Контактный элемент 151 или 3151, имеющий контактный шар 155, не располагается на выбранном месте EMPL. Однако, пользователь может визуально обнаружить и идентифицировать выбранное место EMPL, которое он определил через открытое отверстие 1510, выполненное во вспомогательном элементе 157, для расположения его на отрезке прямой линии, проходящей от точки входа NTRPNT к целевой точке TRGTP, как представлено на фиг. D. На фиг. 13 и 14 изображен свободный концевой участок 1281 первого дополнительного участка 128, или первый конец 312 первого структурного участка 312, в котором образован контактный элемент 151 или 3151, или контактный элемент 151 или 3151, например, неподвижно прикреплен, скажем, съемными механическими фиксаторами 160 или посредством другого прикрепления, соединенного со вторым дополнительным участком 148 средством, известным специалистам в данной области техники. Контактный элемент 3151 или 151 может быть съемным, взаимозаменяемым и заменяемым другими, отличными от этого контактными элементами. Кроме того, контактный элемент 151 или 3151 может иметь окно 159 для пальца, например, открытое отверстие 1510 или 3158, через которое кончик пальца FNGRTP может проходить настолько, чтобы касаться и прощупывать выбранное место EMPL. Центр окна 159 для пальца или открытого отверстия 3158 может рассматриваться как контактная точка 3151 или 154. Продольная ось 199 медицинского приспособления 19 нацелена на выбранное, посредством окна 159 или 3158 для пальца, обнаруженное место EMPL.
Контактный элемент 3151 может также быть выполнен в виде шарнирного механизма 1511 для прикрепления к первому структурному участку 312 согласно описанию, относящемуся к фиг. 15-18, приведенному выше в настоящем документе.
На фиг. 23 представлена структурная направляющая 171 приспособления механической конструкции 311, соединенная со вторым концом 3142 второго структурного участка 314, неподвижно прикрепленная в точно ориентированном направлении. Структурная направляющая 171 приспособления предназначена для поддержания медицинских приспособлений 19 и выполнена с возможностью поддержания привода 18 приспособления. Структурная направляющая 171 приспособления неподвижно соединена с концом 3142.
Привод 18 приспособления может быть связан для работы со структурной направляющей 171 приспособления и введен в нее с наружной стороны 3142b второго структурного участка 314. Рабочее устройство 180 может включать в себя медицинское приспособление 19, подлежащее приведению в действие двигателем или вручную. Рабочее устройство 180 может, таким образом, включать в себя механизированный привод 181, например, удерживаемый в руках наконечник 182, к которому присоединено медицинское приспособление 19. В отличие от механического механизма 11 медицинское приспособление 19, поддерживаемое механической структурой 311, поступательно перемещается исключительно посредством движения, переданного рабочему устройству 180, относительно структурной направляющей втулки 1721. В этом состоит отличие от одновременного перемещения направляющей 17 приспособления вместе с приводом 18 приспособления, как это происходит при использовании механического механизма 11.
Именно конфигурация механической структуры 311 обеспечивает, что продольная ось 199 медицинского приспособления 19, например, ортопедического приспособления или зубного приспособления, поддерживаемая структурной направляющей 171 приспособления, остается постоянно совмещенной с контактным элементом 151 или 3151, или с контактной точкой 154 или 3154. Структурное медицинское устройство 310 обеспечивает, что независимо от его пространственного положения и наклона, как только контактный элемент 151 или 3151 размещаются на выбранном месте EMPL, а кончик 198 медицинского приспособления 19 - на точке входа NTRPNT, медицинское приспособление 19 нацелено на целевую точку TRGTP. Другими словами, медицинское приспособление 19 нацелено на контактную точку 154, расположенную на месте EMPL, на прямолинейной оси X или 10X, проходящей через точку входа NTRPNT и нацеливаемую целевую точку TRGTP, как представлено на фиг. D.
На фиг. 23 проиллюстрирован схематический вариант осуществления структурной направляющей 171 приспособления, выполненной как структурная направляющая втулка 1721, которая неподвижно соединена с концом 3142 второго структурного участка 314. Структурная направляющая втулка 1721 соединяется соосно с осью X, проходящей через контактную точку 154 или 3154, как представлено, соответственно, на фиг. 2 и 23. Структурная направляющая втулка 1721 может быть выполнена как направляющая трубка 3161, имеющая меньший внутренний диаметр 175, который может приниматься за номинальный внутренний диаметр. Меньший внутренний диаметр 175 может быть выполнен с возможностью вмещения в него и поддержания любой из переходных втулок 173 или иметь меньший внутренний диаметр 178, который предназначен для направления и поддержания в нем конкретного медицинского приспособления 19.
Аналогично направляющей втулке 172 механического механизма 11 структурная направляющая втулка 1721 может иметь меньший внутренний диаметр 175 направляющей втулки, который может иметь номинальный диаметр, составляющий 6 мм, например, и может соответствовать переходной втулке 173, имеющей внутренний диаметр 178 переходной втулки, подходящий для направления медицинского приспособления 19 диаметром 4,2 мм. Такое медицинское приспособление 19 может представлять собой сверло 193 для сверления фиксирующего канала для скуловой имплантaции или медицинский имплант, например, скуловой имплант ZI, или медицинский инструмент другого типа. Для сверления предварительного канала PRLMBR в направляющую втулку 172 может вставляться переходная втулка 173, имеющая внутренний диаметр 179 переходной втулки, соответствующий диаметру сверла 192 для предварительного сверления отверстия, скажем, диаметром 2,8 мм. Могут обеспечиваться различные размеры переходной втулки 173 для соответствия и поддержки множества медицинских приспособлений 19. Множество медицинских приспособлений 19 могут поддерживаться структурной направляющей 171 приспособления для обеспечения точной нацеленности на целевую точку TRGPT, в частности, когда целевая точка TRGTP скрыта от обзора, например, в случае скулового импланта ZI или при сверлении несквозного канала BBOR для других целей. Альтернативно, структурная направляющая втулка 1721 может иметь меньший внутренний диаметр 175 направляющей втулки, соответствующий конкретному медицинскому приспособлению 19.
Использование структурного медицинского устройства 310
Структурное медицинское устройство 310 представляет собой другой вариант осуществления медицинского устройства 10, но оба они обеспечивают направление для обеспечения надлежащей имплантации имплантов в требуемой и выбранной ориентации по направлению. Использование структурного медицинского устройства 310 аналогично использованию медицинского устройства 10, с учетом того, что структурное медицинское устройство 310 изготовлено как единый элемент, в противоположность первому участку 12 и второму участку 14 медицинского устройства 10.
Во-первых, не являясь раздвижным и выдвигаемым, структурное медицинское устройство 310, имеющее форму и размер, подходящие для данного вмешательства, должно быть выбрано из набора таких устройств. Во-вторых, образуется рабочий модуль 16 посредством присоединения к нему привода 18 приспособления, который поддерживает зубное приспособление 19, которое соединяется с наконечником 182 и приводится в действие наконечником 182. Может использоваться переходная втулка 173. Контактный элемент 151 контактного модуля 15 располагается на лице пациента, на коже SKN напротив скуловой кости Z, на которой пользователь выбрал место EMPL посредством ощупывания. Зубное приспособление 19 вставляется так, чтобы оно выступало из структурной направляющей втулки 1721.
При помощи контактного элемента 151 на месте EMPL и кончика 198 зубного приспособления 19, продвинутого на точку входа NTRPNT, как представлено на фиг. 1, наконечник 182 сверлит несквозной канал. Несквозной канал BBOR сверлится до остановки посредством пальце-пальпаторного обнаружения приближения сверла 194. Затем наконечник 182 выводится из структурной направляющей 171 приспособления. И, наконец, может использоваться вставка и закрепление зубного приспособления 19 вручную, необязательно посредством структурной направляющей 171 приспособления, для завершения имплантации.
Следует заметить, что использование структурного медицинского устройства 310 не допускает разночтений в отношении свободного ручного ненаправляемого направления ориентации и глубины сверления канала.
Таким образом, описано медицинское устройство 10 и способ направления медицинского приспособления 19. Медицинское устройство 10 в целом предназначено для использования хирургами или врачами, подобными зубным хирургам, но без ограничения этой областью медицины. Медицинское приспособление 19 рассматривается как медицинские инструменты и медицинские изделия, используемые для выполнения медицинского вмешательства или медицинской процедуры. Такие инструменты могут включать в себя сверла, медицинские импланты и инструменты для остеотомии, приводимые в действие двигателем или вручную.
Медицинское устройство 10 может иметь механический механизм 11, имеющий первый участок 12 механизма, который включает в себя контактный модуль 15, поддерживающий контактный элемент 151, который может представлять конкретную контактную точку 154, такую как кончик шипа, или иметь точку поверхности, которая может контактировать с участком тела BDY. Термин «тело» BDY относится к телу живого позвоночного организма и включает в себя кость BNE, кожу SKN и ткань. Место для контактного элемента 151, обеспечивающее контакт с телом BDY, определяется пользователем медицинского устройства 10 как выбранное место EMPL.
Механический механизм 11 может также иметь второй участок 14 механизма, включающий в себя рабочий модуль 16, который предназначен для направления и поддержки медицинского приспособления 19. Термин «направление» означает сохранение требуемого направления ориентации. Другими словами, недопущение отклонения медицинского приспособления 19 в направлении ориентации, отличном от требуемого направления, при этом указанное отклонение может происходить, например, от встречи с препятствиями, что вызывает отклонение от требуемого направления.
Механический механизм 11 дополнительно выполнен с возможностью обеспечивать перемещение контактного элемента 151 и рабочего модуля 16 относительно друг друга. Один из двух элементов соединения, включающего в себя контактный элемент 151 и рабочий модуль 16, может оставаться неподвижным, при этом другой из двух элементов соединения может перемещаться ближе к нему или дальше от другого. Относительное перемещение может, таким образом, быть двунаправленным, но ограниченным поступательным перемещением вдоль ограниченного отрезка прямой линии. Кроме того, механический механизм 11 сохраняет медицинское приспособление 19 постоянно и непрерывно нацеленным на и в направлении выбранного пользователем места EMPL. Это, таким образом, также означает, что механический механизм 11 сохраняет медицинское приспособление 19 постоянно и непрерывно нацеленным на контактный элемент 151, расположенный на выбранном месте EMPL.
Рабочий модуль 16 дополнительно выполнен с возможностью поддерживать множество различных медицинских приспособлений 19, и поддерживать направляющую 17 приспособления, а также направляющую 17 приспособления, связанную для работы с приводом 18 приспособления. Направляющая 17 приспособления может поддерживать по меньшей мере одно из направляющей втулки 172 для направления медицинского приспособления 19, при этом направляющая втулка 172 предназначена для поддержания одной или более переходных втулок 173. Привод 18 приспособления предназначен для поддержания механизированного привода 181, например, переносного механического инструмента 182, с которым медицинский инструмент 19 может быть соединен, и для приведения в движение медицинского приспособления 19. Привод 18 приспособления является независимым от медицинского устройства 10 и от механического механизма 11. Следовательно, направляющая 17 приспособления, которая неподвижно соединена с механическим механизмом 11, открыта для вмещения и направления ручного медицинского инструмента 19 для его работы вручную, или до или после присоединения привода 18 приспособления для работы с помощью направляющей 17 приспособления. При работе механизированный привод 181 и направляющая 17 приспособления могут оставаться соединенными вместе посредством удержания рукой.
Контактный элемент 151, поддерживаемый контактным модулем 15, может иметь открытое отверстие 1510, которое предназначено для проверки через него посредством визуального осмотра и/или ручной тактильной пальпации выбранного места EMPL. Выбранное место EMPL может располагаться на участке тела BDY, включающем в себя кость BNE, ткань TSS и кожу SKN, а также на вспомогательном элементе 157. Открытое отверстие 1510, которое открыто в контактном элементе 151, обеспечивает пользователю возможность проверять через него вспомогательный элемент 157, или посредством визуального осмотра и/или посредством ручной тактильной пальпации. Следует заметить, что контактный элемент 151 может быть выполнен как шарнирный механизм 1511. Пользователь является оператором медицинского устройства 10. Кроме того, открытое отверстие 1510 может выбираться имеющим требуемую геометрическую форму.
Механический механизм 11 дополнительно выполнен с возможностью поддержания по меньшей мере одного стопора 20. Указанный по меньшей мере один стопор 20 предназначен для недопущения дальнейшего поступательного перемещения с закрытием механизма 11, таким образом, для недопущения сведения вместе первого участка 12 и второго участка 14 механического механизма 11, например, для недопущения более глубокого просверливания канала BRE. Стопорный элемент 20, который поддерживается и соединяется с механическим механизмом 11, может управляемым образом располагаться и фиксироваться на нем, но съемно, для регулирования в требуемом расположении. Таким образом, возможно регулируемо установить промежуток разделения 210, который разделяет контактный элемент 151 и/или его контактную точку 154 и кончик 198 медицинского приспособления 19. Таким образом, указанный по меньшей мере один стопор 20 может регулироваться для ограничения глубины проникновения медицинского приспособления 19 в несквозной канал BBOR. Регулировка положения указанного по меньшей мере одного стопора 20 может быть получена посредством или одного из двух или обоих из управления точной регулировкой и управления грубой регулировкой. Контактная точка 154 контактного элемента 151 может дополнительно быть предназначена для размещения на вспомогательном элементе 157, который поддерживается на теле BDY. Однако требуется осторожность, например, использования тактильной пальпации и/или визуального осмотра, для поддержания контактной точки 154 в положении вдоль прямого отрезка линии, нацеленной на выбранное место EMPL.
Первый участок 12 и второй участок 14 механического механизма 11 выполнены с возможностью работать в первой плоскости работы 1PL. Первый дополнительный участок 128 соединен с первым участком 12, который поддерживает контактный модуль 15, а второй дополнительный участок 148 соединен со вторым участком 14, который поддерживает рабочий модуль 16. И первый дополнительный участок 128, и второй дополнительный участок 148 выполнены с возможностью работы во второй плоскости работы 2PL. Однако первая плоскость работы 1PL и вторая плоскость работы 2PL могут представлять собой или одну и ту же плоскость или различные плоскости. Тем не менее медицинское устройство 10 дополнительно выполнено с возможностью удерживать независимое ручное устройство жесткой механической конструкции. Кроме того, медицинское приспособление 19 остается постоянно нацеленным на открытое отверстие 1510 вдоль отрезка прямой линии, независимо от движения и неподвижности механического механизма 11 и по меньшей мере одного из медицинских приспособлений 19. Кроме того, направляющая 17 приспособления дополнительно выполнена с возможностью поддерживать по меньшей мере одно медицинское приспособление 19 нацеленным на контактную точку контактного элемента 151, а привод 18 приспособления выполнен с возможностью приведения в действие указанного по меньшей мере одного медицинского приспособления 19 самого по себе и в сочетании с по меньшей мере одним из прямолинейного поступательного движения, вращательного движения и возвратно-поступательного движения.
В другом примерном варианте осуществления медицинское устройство 10 может быть выполнено как структурное медицинское устройство 310, имеющее механическую конструкцию 311 для направления и ориентации медицинского приспособления 19. Структурное медицинское устройство 310 может поддерживать первый структурный участок 312, второй структурный участок 314 и третий структурный участок, при этом указанные три участка жестко соединены вместе. Структурное медицинское устройство 310 может иметь изогнутую форму в виде буквы C, в которой один концевой участок буквы C поддерживает контактный блок 315, а другой концевой участок буквы C поддерживает структурную направляющую 171 приспособления.
Первый структурный участок 312 может поддерживать контактный блок 315, имеющий контактный элемент 3151, предназначенный для размещения на выбранном месте EMPL на участке тела BDY, а второй структурный участок 314 может поддерживать структурную направляющую 171 приспособления, которая удерживает и направляет медицинское приспособление 19. Кроме того, механическая конструкция 311 выполнена с возможностью постоянного направления и нацеливания продольной оси 199 медицинского приспособления 19 на контактный элемент 3151. Таким образом, механическая конструкция 311 предназначена для сохранения медицинского приспособления 19 нацеленным на контактный элемент 3151 в соосном совмещении относительно друг друга вдоль прямого отрезка линии.
Структурная направляющая 171 приспособления может быть предназначена для поддержания по меньшей мере одного зубного приспособления 19 и по меньшей мере одной переходной втулки 173. Контактный элемент 3151 может иметь открытое отверстие 3158, предназначенное для проверки через него по меньшей мере посредством одного из визуального осмотра и тактильной пальпации выбранного места EMPL, расположенного на участке тела BDY, включающего в себя кость BNE, ткань TSS и кожу SKN.
Контактная точка 3154 контактного элемента 3151 может дополнительно предназначаться для размещения на вспомогательном элементе 157, который может поддерживаться на теле BDY и быть ориентирован вдоль прямого отрезка линии. Однако, требуется осторожность, например, тактильная пальпация и/или визуальная проверка, для сохранения контактной точки 154 в положении вдоль прямого отрезка линии, нацеленной на выбранное место EMPL.
Структурное медицинское устройство 310 может быть выполнено как независимое переносное устройство жесткой механической конструкции 311 и может быть изготовлено посредством процесса аддитивной печати.
Контактный элемент 3151 может быть выполнен с возможностью поддерживать шарнирный механизм 1511.
Структурная направляющая 171 приспособления дополнительно выполнена с возможностью работы совместно с переносным механизированным приводом 181, с которым соединено медицинское приспособление 19. Кроме того, медицинское приспособление 19 может приводиться в действие механизированным приводом 181, одним или в сочетании, в по меньшей мере одно из прямолинейного поступательного движения, вращательного движения и возвратно-поступательного движения.
Промышленная применимость
Медицинское устройство 10 и структурное медицинское устройство 310 являются подходящими для изготовления промышленностью, производящей медицинские устройства и медицинские инструменты.
Перечень ссылок
# Наименование
α угол
β угол
γугол
δ угол
A передняя точка
ALVRG альвеолярный отросток
ANCBR канал для закрепления импланта
BBOR несквозной канал
BDY тело
BDYEX наружная сторона тела
BNE кость
BNPRT небольшой открытый участок
BRE канал
C целевая точка
DRLL сверло
EMPL выбранное место
FGR палец
FNGRTP кончик пальца
MRK метка
MXSNS верхнечелюстная пазуха
NTRPNT точка входа
P профильная линия
PIV поворот
PRLBR предварительный канал
SNSWL стенка пазухи
SKN кожа
THT зубы
TRGTP целевая точка
TSS ткань
ZI скуловой имплант(ация)
1PL первая плоскость работы
2PL вторая плоскость работы
10 медицинское устройство или устройство ориентации сверла
10X ось нацеливания устройства
11 механический механизм
12 первый участок
13 продольные подшипники
14 второй участок
15 контактный модуль
16 рабочий модуль
17 направляющая приспособления
18 привод приспособления
19 медицинское приспособление
20 стопор или стопорный элемент
120 первый рамочный элемент
121 первый прямой элемент
122 первый поперечный элемент
123 первый верхний поперечный элемент
124 первый нижний поперечный элемент
125 первый продольный элемент
126 первый малый продольный элемент
127 первый большой продольный элемент
128 первый дополнительный участок
128a внутренняя сторона первого дополнительного участка 128
129 стопорный элемент
1281 участок свободного конца элемента 128
12D расстояние между осями 131
12M прямой элемент
14D расстояние 14D между осями 142X
13 расстояние между осями 131
131 оси на первом участке
14 второй участок
140 второй рамочный элемент
141 второй прямой элемент
142 второй поперечный элемент
42X оси на втором участке
143 второй верхний поперечный элемент
144 второй нижний поперечный элемент
145 второй продольный элемент
146 второй малый продольный элемент
147 второй большой продольный элемент
148 второй дополнительный участок
148a внутренняя сторона второго дополнительного участка
148b наружная сторона второго дополнительного участка
1481 участок свободного конца элемента 148
151 контактный элемент
152 шип
153 кончик шипа
154 контактная точка
155 контактный шар
156 контактная полусфера
157 вспомогательный элемент
158 съемный контактный элемент
159 окно для пальца
160 крепежные средства
1510 открытое отверстие
1511 шарнирный механизм
1512 сердечник
1513 шатун
1514 опора для пальца
1515 промежуточный элемент
1516 свободный конец элемента 1517
1517 сквозной штифт
1518 искривленный канал
1519 искривленный участок элемента 1513
1520 канал сердечника
1521 канавка
1522 плечо шатуна
1523 свободный конец элемента 1522
1524 шайба
1525 канал шайбы
1526 штифт
1527 ветка сердечника
1528 центр элемента 1530
1529 гнездо для пальца
1530 отверстие для кончика пальца элемента 1529
1531 отверстие для пальца
171 структурная направляющая приспособления
1721 структурная направляющая втулка
172 направляющая втулка
173 переходная втулка
174 больший внутренний диаметр направляющей втулки
175 меньший внутренний диаметр направляющей втулки
176 переводный фланец
177 наружный диаметр переходной втулки
178 внутренний диаметр (переходной втулки)
179 шаг направляющей втулки
180 рабочее устройство
181 механизированный привод
182 наконечник
19 медицинское приспособление
190 медицинский инструмент
191 инструмент для остеотомии
192 предварительное сверло
193 сверло для фиксирующего/имплантационного канала
194 сверло
195 медицинский имплант
196 инструмент для вставки и закрепления
197 глубинометр
198 кончик медицинского приспособления
199 продольная ось элемента 19
20 стопор или стопорный элемент
201 стопорный элемент
202 стопорный проход
203 поршень
204 лезвие
205 упругий элемент
206 стакан
207 кнопка
209 толкатель
210 продольное расстояние или промежуток разделения
211 отверстие стакана
213 прорезь толкателя
310 структурное медицинское устройство
311 механическая структура
312 первый структурный участок
3121 первый конец элемента 312
313 третий структурный участок
314 второй структурный участок
3142 конец второго участка элемента 314
3142a внутренняя сторона элемента 3142
3142b наружная сторона элемента 3142
315 контактный блок
3151 контактный элемент
3152 шип
3153 кончик шипа
3154 контактная точка
3157 вспомогательный элемент
3158 открытое отверстие
316 направляющий блок
3161 направляющая трубка
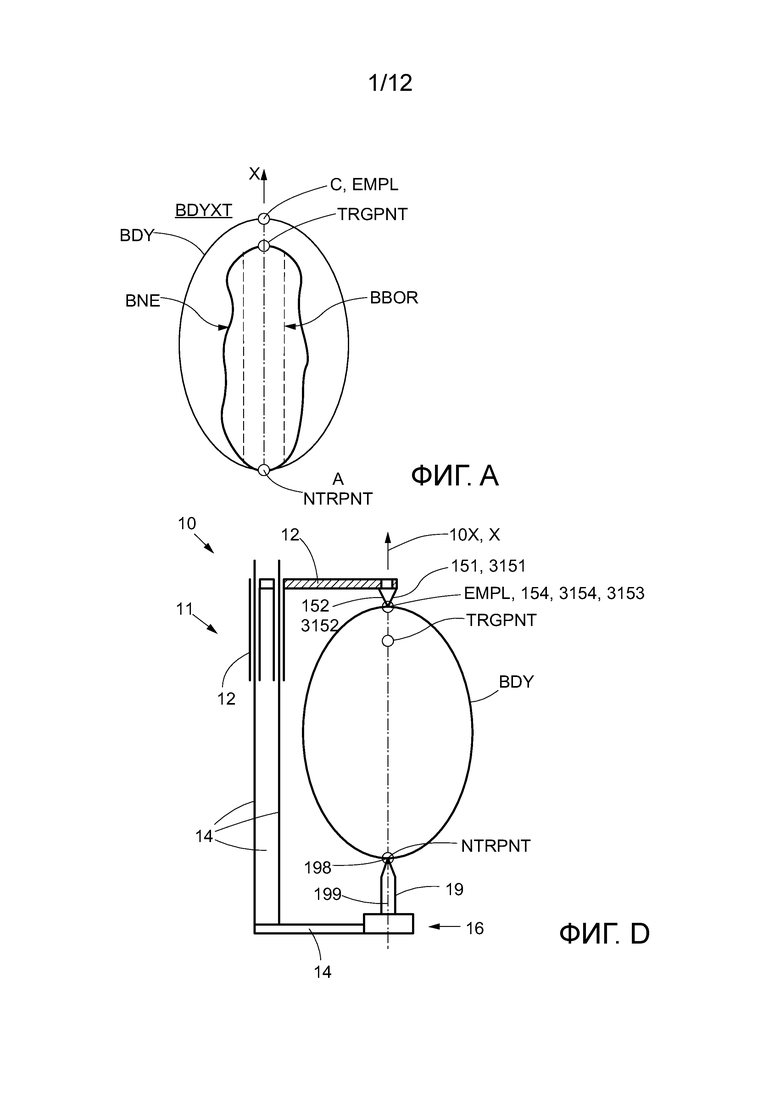
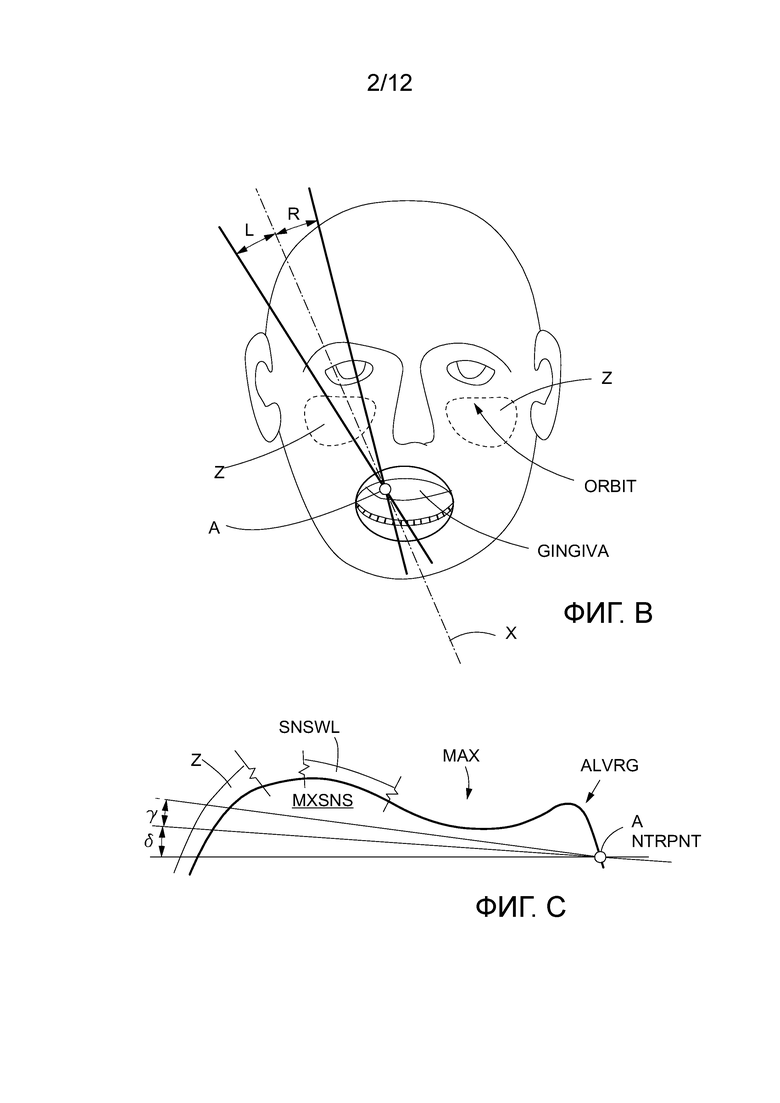
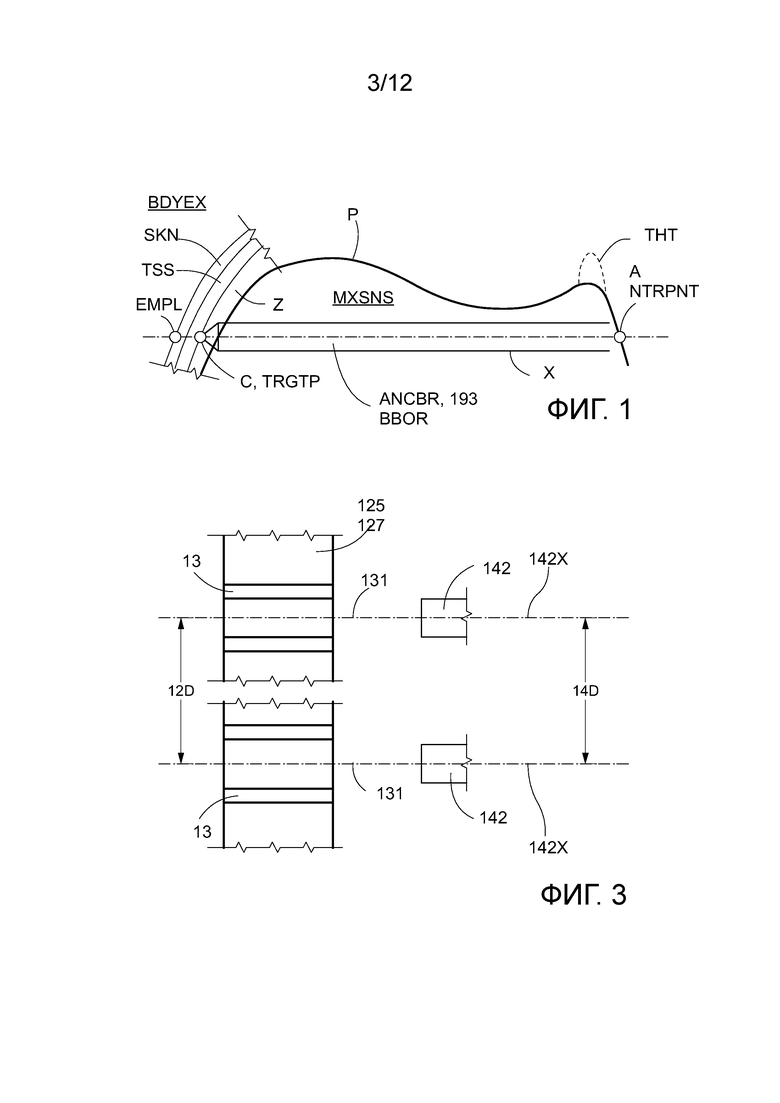
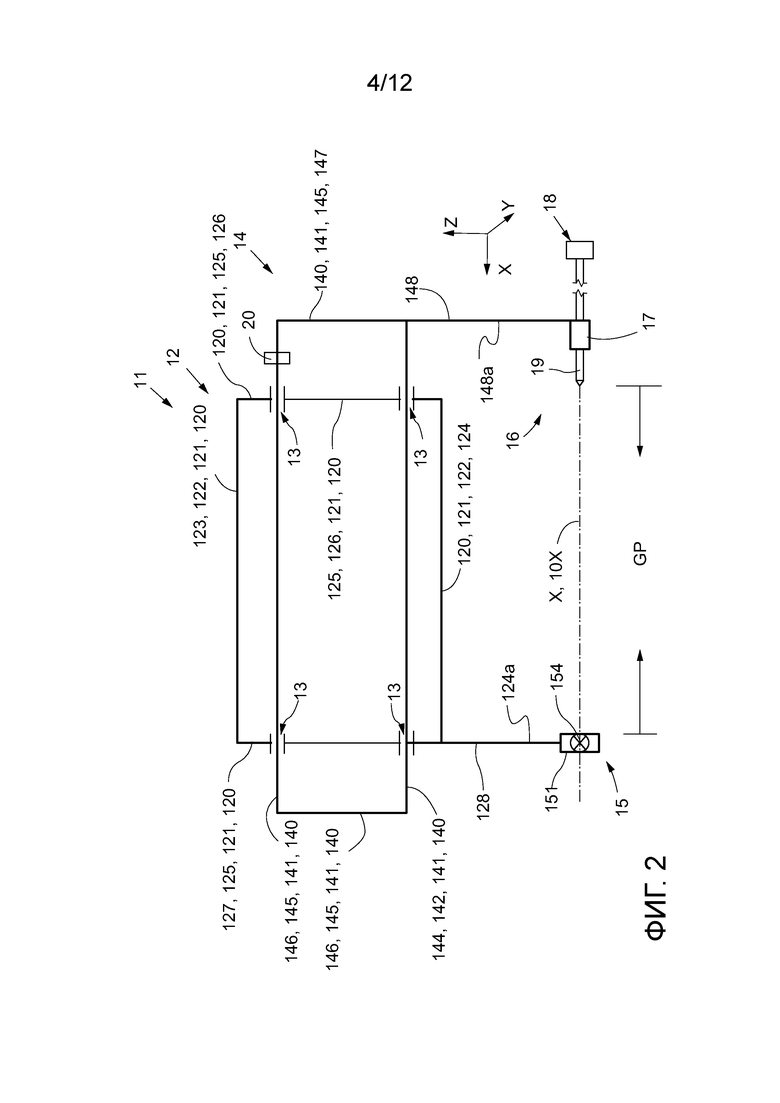
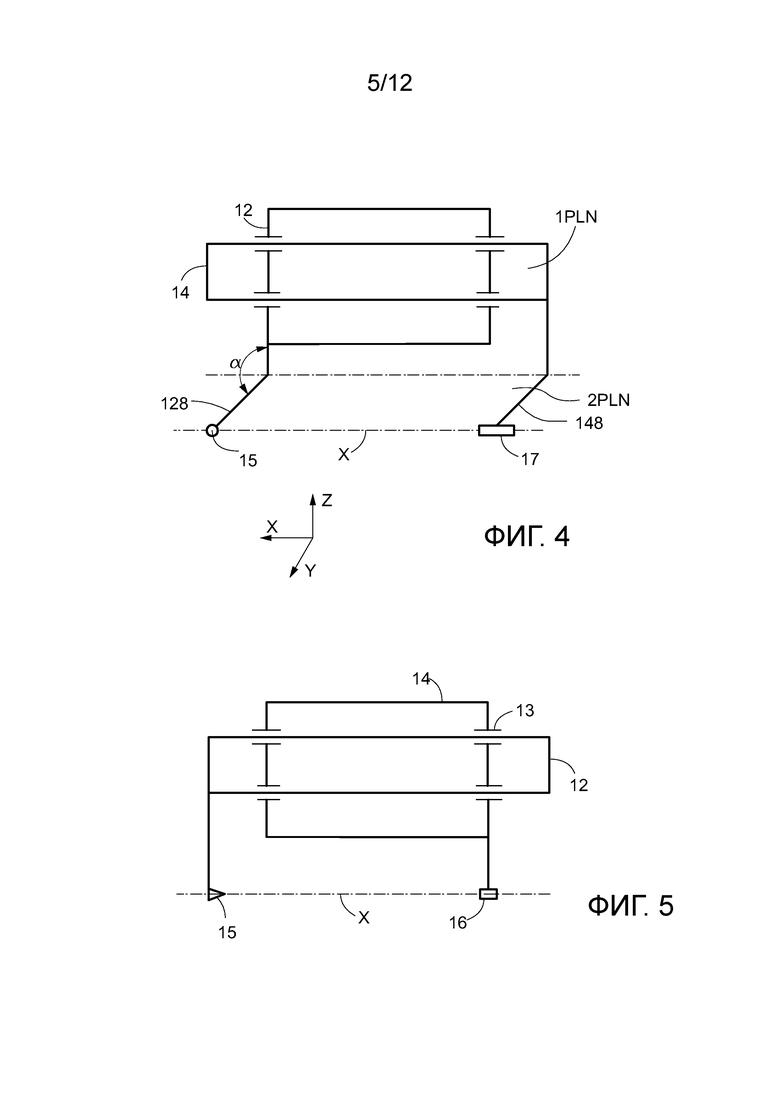
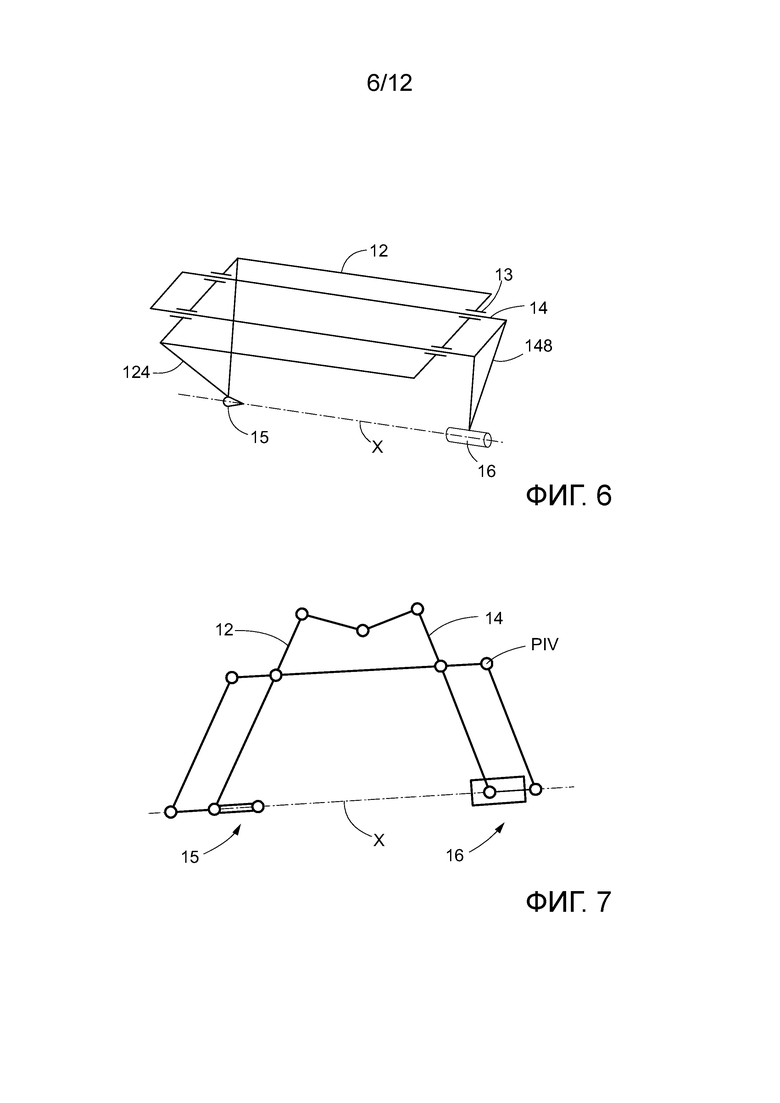
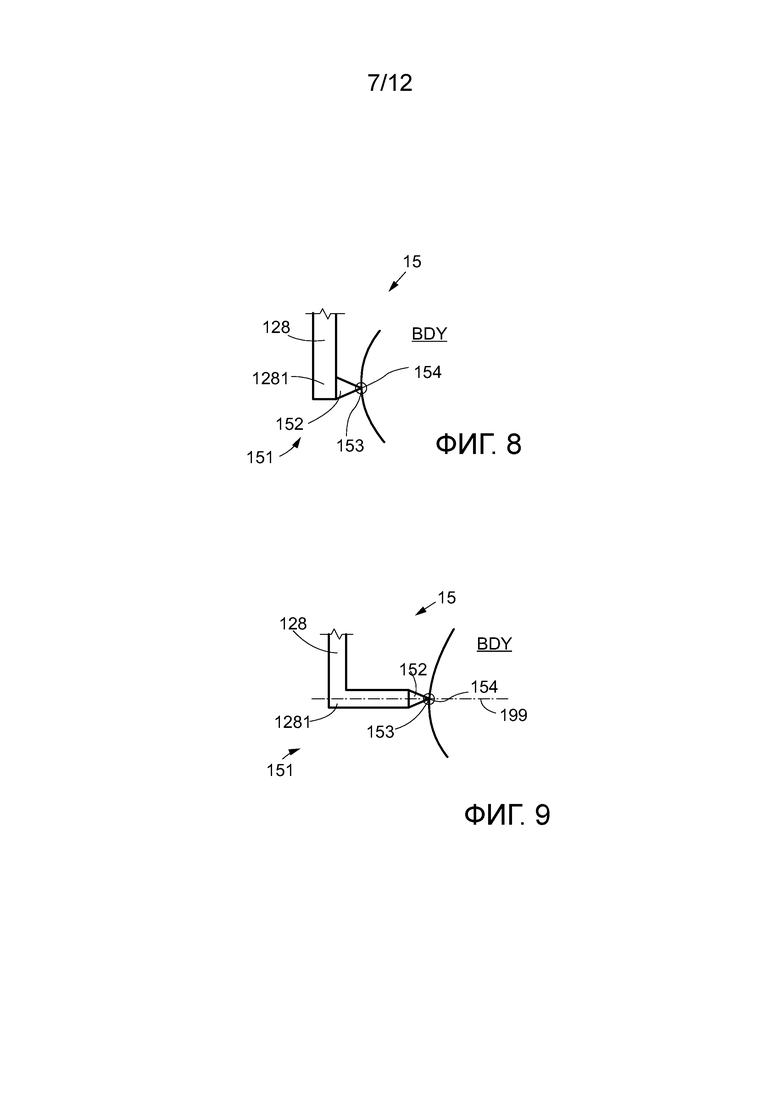
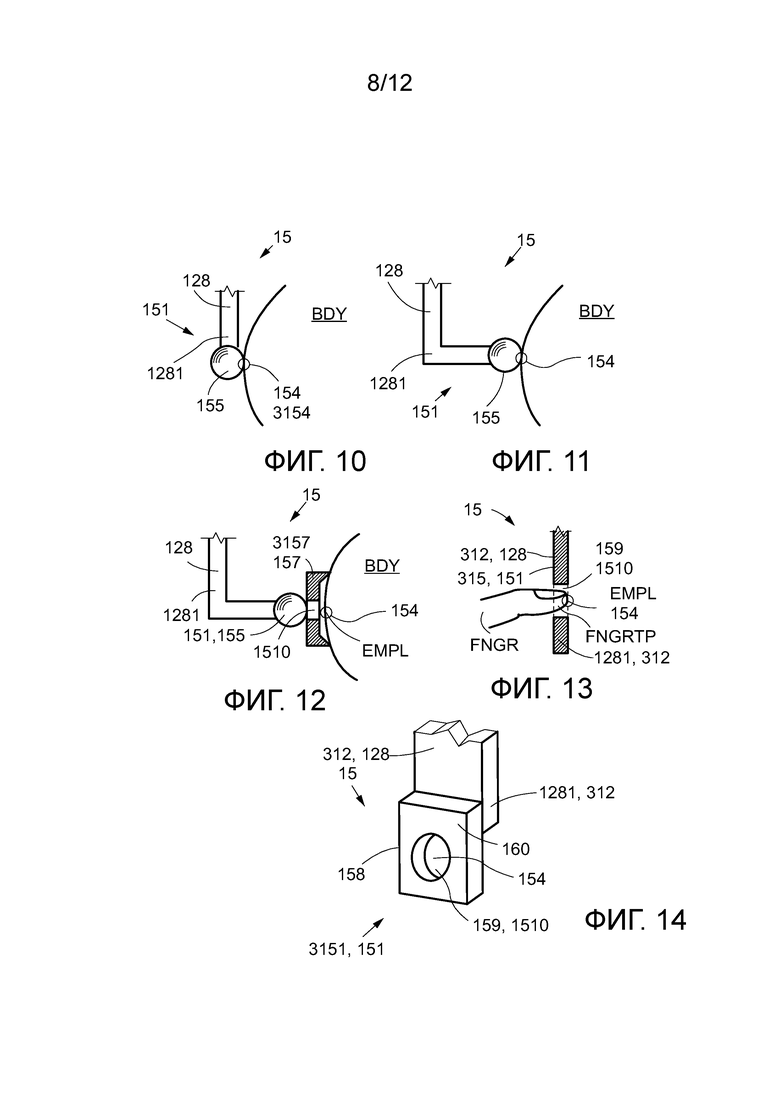
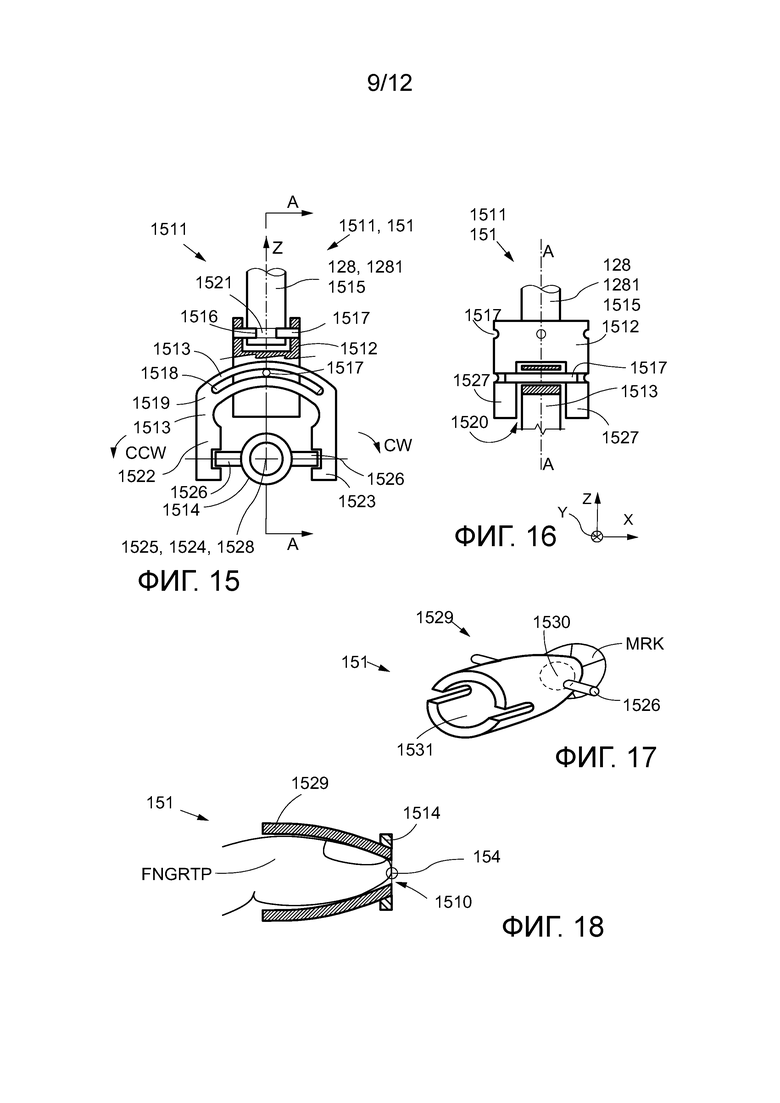
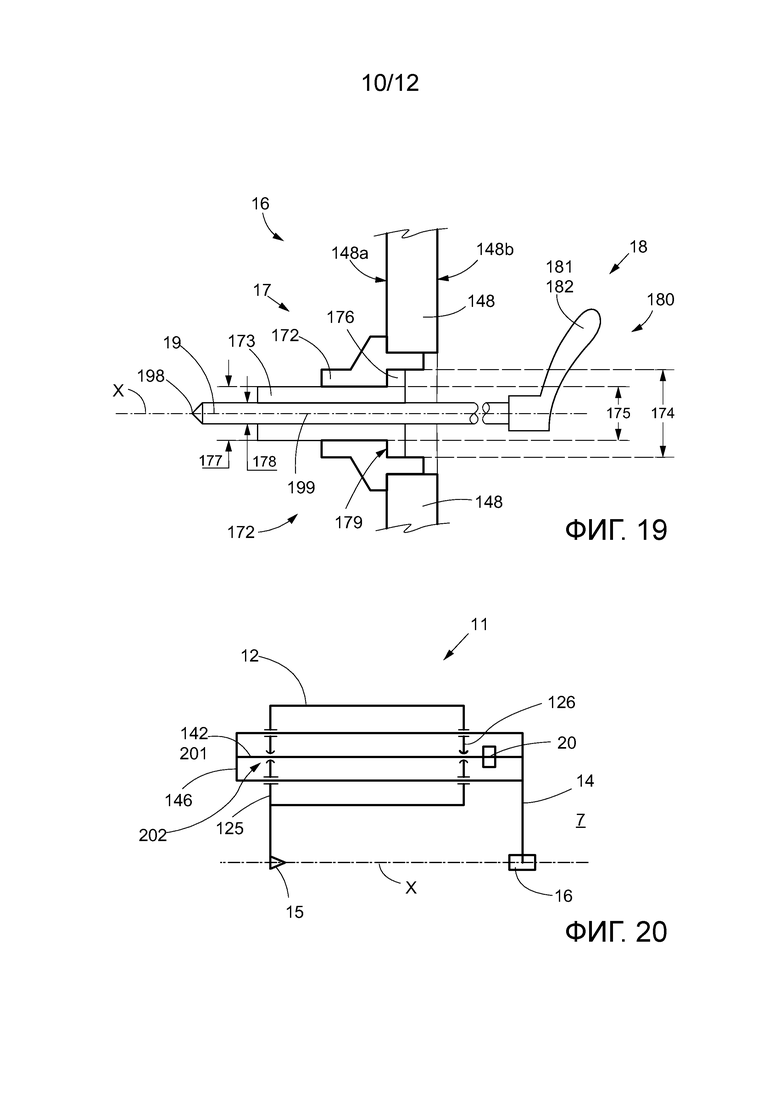
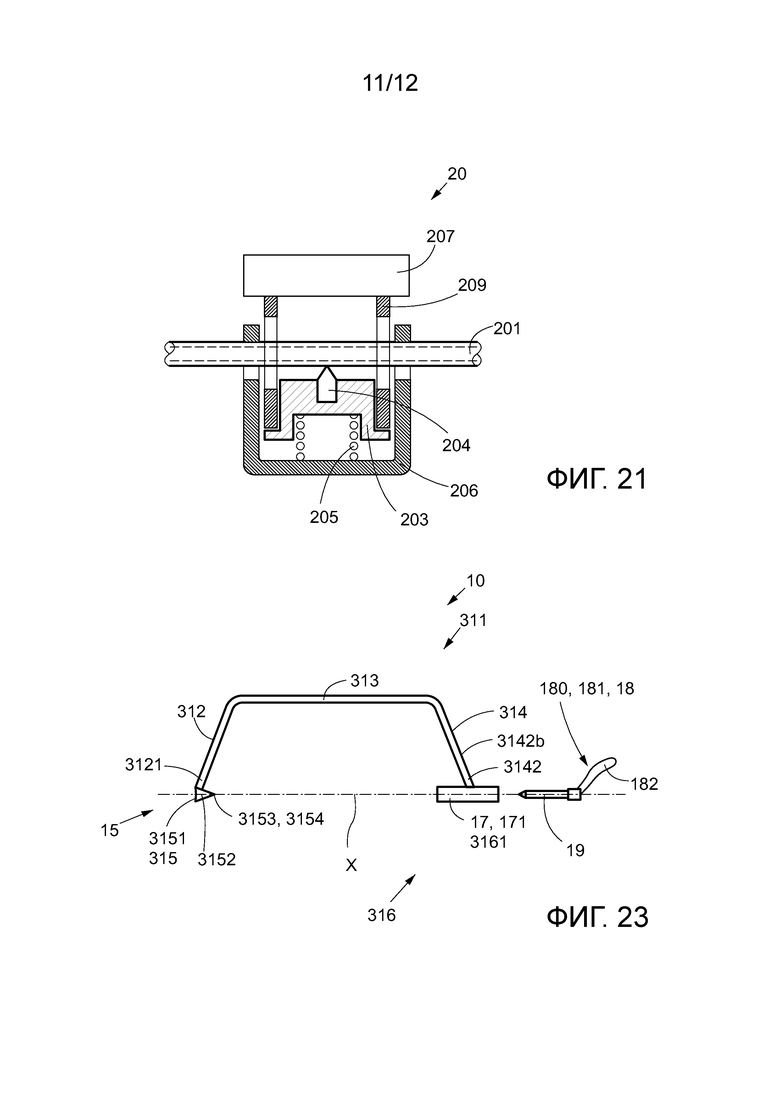
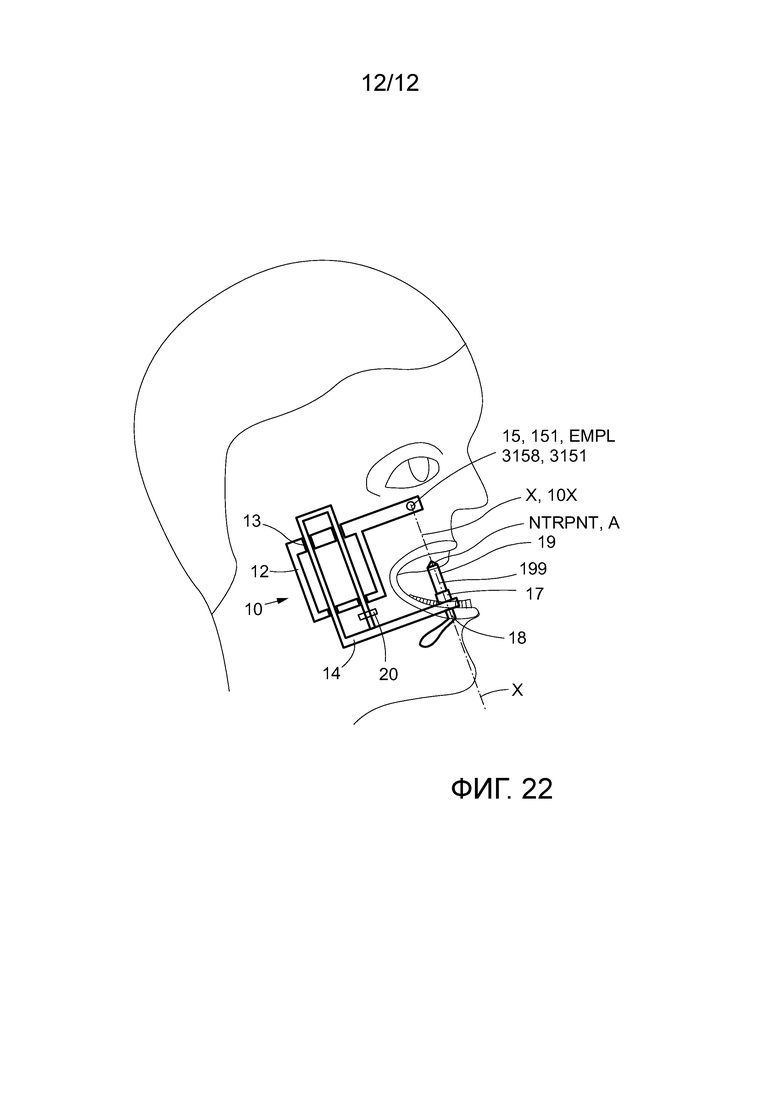
Группа изобретений относится к стоматологии и ортопедии и может быть использована при имплантациях, включающих в себя скуловые имплантации и импланты для ортопедических целей. Медицинское устройство ориентируют способом ориентирования и направления медицинского приспособления. Механизм устройства содержит первый и второй участки. Первый участок механизма включает в себя контактную точку для расположения на выбранном месте EMPL на участке тела BDY. Второй участок механизма включает в себя рабочий модуль для направления и поддержания указанного медицинского приспособления. Механизм обеспечивает перемещение контактного элемента и рабочего модуля относительно друг друга в двухстороннем поступательном перемещении вдоль отрезка прямой линии и поддерживает медицинское приспособление постоянно нацеленным на выбранное место EMPL. Рабочий модуль также поддерживает направляющую приспособления для поддержания привода приспособления, включающего в себя механизированный привод для работы соединенных с ним медицинских приспособлений. Технический результат заключается в возможности вручную направить и просверлить несквозной канал в точной ориентации в направлении невидимой целевой точки без помощи другой аппаратуры. 3 н. и 34 з.п. ф-лы, 22 ил.
1. Медицинское устройство 10 для направления медицинского приспособления 19 для имплантации скуловых имплантов,
отличающееся тем, что содержит:
механический механизм 11, содержащий:
первый участок 12 механизма, соединенный с первым дополнительным участком 128, и включающий в себя контактный элемент 151 или контактную точку 154, выполненную с возможностью расположения на выбранном месте EMPL на участке тела BDY, и
второй участок 14 механизма, соединенный со вторым дополнительным участком 148, и включающий в себя рабочий модуль 16, выполненный с возможностью направления и опоры медицинского приспособления 19, при этом механический механизм 11 дополнительно выполнен с возможностью:
обеспечивать смещение контактного элемента 151 и рабочего модуля 16 относительно друг друга в двухстороннем поступательном перемещении вдоль отрезка прямой линии, и
поддерживать медицинское приспособление 19 постоянно нацеленным на выбранное место EMPL посредством открытого отверстия 1510 контактного элемента 151, при этом указанное отверстие предназначено для проведения через него визуального осмотра и/или тактильной пальпации выбранного места EMPL,
при этом первый участок 12 и второй участок 14 расположены в первой плоскости работы 1PL, а первый дополнительный участок 128 и второй дополнительный участок 148 расположены во второй плоскости работы 2PL, и
первая плоскость работы 1PL и вторая плоскость работы 2PL представляют собой или одну и ту же плоскость, или разные плоскости.
2. Устройство по п. 1, в котором механический механизм 11 дополнительно выполнен с возможностью нацеливать медицинское приспособление 19 на контактный элемент 151.
3. Устройство по п. 1, в котором рабочий модуль 16 дополнительно выполнен с возможностью поддерживать медицинские приспособления 19.
4. Устройство по п. 1, в котором рабочий модуль 16 дополнительно выполнен с возможностью поддерживать по меньшей мере одну из направляющей 17 приспособления, и направляющей 17 приспособления, которая связана с приводом 18 приспособления.
5. Устройство по п. 4, в котором направляющая 17 приспособления поддерживает по меньшей мере одну из направляющей втулки 172 и направляющей втулки 172, которая поддерживает переходную втулку 173.
6. Устройство по п. 4, в котором привод 18 приспособления выполнен с возможностью поддерживать механизированный привод 181, с которым соединен медицинский инструмент 19, и приводить в движение медицинское приспособление 19.
7. Устройство по п. 6, в котором механизированный привод 181 представляет собой переносной электрический инструмент 182.
8. Устройство по п. 1, в котором контактный элемент 151 предназначен для расположения на выбранном месте EMPL тела BDY, в том числе на кости BNE, ткани TSS и коже SKN, а также для расположения на вспомогательном элементе 157, соединенном с телом.
9. Устройство по п. 1, в котором контактный элемент 151 имеет открытое отверстие 1510, предназначенное для проверки через него посредством по меньшей мере одного из визуального осмотра и ручной тактильной пальпации, таким образом сверление несквозного отверстия BBOR прекращается при обнаружении путем пальпации приближения сверла 194.
10. Устройство по любому из пп. 1 или 6, в котором механический механизм 11 дополнительно выполнен с возможностью поддерживать по меньшей мере один стопор 20, предназначенный для управляемого регулирования места заданного промежутка разделения 210, который разделяет контактную точку 154 контактного элемента 151 и кончик 198 медицинского приспособления 19.
11. Устройство по п. 10, в котором управляемое регулирование места стопора 20 включает в себя по меньшей мере одно из управления точной регулировкой и управления грубой регулировкой.
12. Устройство по п. 1, в котором:
контактная точка 154 контактного элемента 151 дополнительно предназначена для расположения на вспомогательном элементе 157, который опирается на тело BDY, и
контактная точка 154 остается расположенной на прямолинейном отрезке линии, направленной на выбранное место EMPL.
13. Устройство по п. 1, в котором первая плоскость работы 1PL и вторая плоскость работы 2PL располагаются под углом α относительно друг друга, при этом угол α представляет собой одно из фиксированного угла и регулируемого угла.
14. Устройство по п. 1, которое дополнительно выполнено как независимое переносное устройство жесткой механической конструкции.
15. Устройство по п. 9, в котором контактный элемент 151 выполнен как шарнирный механизм 1511, имеющий по меньшей мере три степени свободы вращения.
16. Устройство по п. 6, в котором при работе механизированный привод 81 и направляющая 17 приспособления остаются соединенными вместе посредством удержания рукой.
17. Устройство по п. 9, в котором медицинское приспособление 19 постоянно нацелено на открытое отверстие 1510 вдоль отрезка прямой линии,
независимо от движения и неподвижности механического механизма 11 и движения по меньшей мере одного из медицинских приспособлений 19.
18. Устройство по п. 4, в котором:
направляющая 17 приспособления дополнительно выполнена с возможностью поддержания по меньшей мере одного медицинского приспособления 19 нацеленным на контактный элемент 151, и
привод 18 приспособления выполнен с возможностью приведения в действие указанного по меньшей мере одного медицинского приспособления 19 отдельно и в комбинации, по меньшей мере в одном из прямолинейного поступательного движения, вращательного движения и возвратно-поступательного движения.
19. Устройство по п. 10, в котором указанный по меньшей мере один стопор 20 является регулируемым для ограничения глубины проникновения медицинского приспособления 19 в несквозной канал BBOR.
20. Устройство по п. 9, в котором открытое отверстие 1510 выбрано так, чтобы иметь требуемую геометрическую форму, чтобы кончик пальца FNGRTP проходил через него для обеспечения ручного тактильного контакта с местом EMPL.
21. Способ изготовления медицинского устройства 10 для направления медицинского приспособления 19 для имплантации скуловых имплантов,
отличающийся тем, что содержит этапы, на которых:
изготавливают механический механизм 11, при этом:
обеспечивают первый участок 12 механизма, соединенный с первым дополнительным участком 128 и имеющий контактный элемент 151, изготовленный для расположения на выбранном месте EMPL на участке тела BDY,
обеспечивают второй участок 14 механизма, соединенный со вторым дополнительным участком 148 и имеющий рабочий модуль 16, изготовленный для поддержания медицинского приспособления 19,
при этом первый участок 12 и второй участок 14 расположены в первой плоскости работы 1PL, а первый дополнительный участок 128 и второй дополнительный участок 148 располагаются во второй плоскости работы 2PL, и первая плоскость работы 1PL и вторая плоскость работы 2PL расположены или в одной и той же плоскости или в разных плоскостях,
приспосабливают механический механизм 11 для нацеливания продольной оси 198 медицинского приспособления 19 на открытое отверстие 1510 контактного элемента 151, которое предназначено для визуальной проверки через него посредством визуального осмотра и/или тактильной пальпации выбранного места EMPL, и для
обеспечения взаимного относительного смещения между рабочим модулем 16 и контактным элементом 151 в двухстороннем поступательном движении вдоль отрезка прямой линии и в постоянном взаимном нацеливании медицинского приспособления 19 в ориентации, направленной вдоль прямолинейного отрезка линии, и
образуют контактный элемент 151 как шарнирный механизм 1511, имеющий по меньшей мере три степени свободы вращения.
22. Способ по п. 21, в котором рабочий модуль 16 дополнительно предназначен для поддержки медицинских приспособлений 19.
23. Способ по п. 21, в котором:
рабочий модуль 16 включает в себя направляющую 17 приспособления и привод 18 приспособления, который может вводиться в направляющую 17 приспособления и выводиться из нее, и
извлечение привода 18 приспособления из направляющей 17 приспособления обеспечивает возможность последней поддерживать и направлять медицинские приспособления 19 внутри нее.
24. Способ по п. 23, в котором направляющая 17 приспособления выполнена для поддержания и направления зубных приспособлений 19 посредством использования подходящих по диаметру переходных втулок 173.
25. Способ по п. 24, в котором переходные втулки 173 поддерживаются в направляющей 17 приспособления в съемном зацеплении внутри нее и с возможностью высвобождаемого извлечения из нее.
26. Способ по п. 23, в котором:
привод 18 приспособления предназначен для поддержания переносного механизированного привода 181, предназначенного для обеспечения движения к зубному приспособлению 19, поддерживаемому им, и
переносной механизированный привод 181 представляет собой наконечник 182.
27. Способ по п. 21, в котором:
контактный элемент 151 имеет открытое отверстие 1510, приспособленное для:
расположения на выбранном месте EMPL, и
обеспечения проверки посредством визуального осмотра и тактильной пальпации выбранного места EMPL через указанное открытое отверстие 1510.
28. Способ по п. 21, в котором шарнирный механизм 1511, содержит опору 1514 для пальца, которая выполнена с возможностью съема и замены.
29. Способ по п. 23, в котором:
направляющая 17 приспособления дополнительно предназначена для поддержания по меньшей мере одного медицинского приспособления 19 нацеленным на контактный элемент 151, и
привод 18 приспособления выполнен с возможностью приводить в действие указанное по меньшей мере одно медицинское приспособление 19 отдельно и в комбинации, по меньшей мере в одном из прямолинейного поступательного движения, вращательного движения и возвратно-поступательного движения.
30. Медицинское устройство 10 для направления медицинского приспособления 19 для имплантации скуловых имплантов, выбранного в качестве приводимого двигателем медицинского приспособления 19,
отличающееся тем, что содержит:
механический механизм 11, поддерживающий:
первый участок 12, соединенный с первым дополнительным участком 128, который поддерживает контактный элемент 151, выполненный с возможностью расположения на выбранном месте EMPL на участке тела BDY,
второй участок 14, соединенный со вторым дополнительным участком 148, который поддерживает, удерживает и направляет приспособление 19, при этом первый участок 12 и второй участок 14 расположены в первой плоскости работы 1PL, а первый дополнительный участок 128 и второй дополнительный участок 148 расположены во второй плоскости работы 2PL, и первая плоскость работы 1PL и вторая плоскость работы 2PL представляют собой или одну и ту же плоскость, или разные плоскости, при этом механизм 11 дополнительно выполнен с возможностью постоянного направления и нацеливания приспособления 19 на открытое отверстие 1510 контактного элемента 151 и для обеспечения:
смещения контактного элемента 151 и приспособления 19 относительно друг друга в двухстороннем поступательном перемещении вдоль отрезка прямой линии, и
визуального осмотра места EMPL и/или ручного тактильного контакта с ним кончика пальца FNGRTP через открытое отверстие 1510,
причем кончик пальца FNGRTP чувствует приближение приближающегося приводимого в действие двигателем медицинского приспособления 19.
31. Устройство по п. 30, в котором:
механический механизм 11 выполнен с возможностью поддерживать медицинское приспособление 19 нацеленным на контактный элемент 151 в соосном совмещении относительно друг друга вдоль прямолинейного отрезка линии, и
контактный элемент 151 поддерживает окно 159 для пальца, чтобы кончик пальца FNGRTP мог коснуться места EMPL.
32. Устройство по п. 30, в котором:
первая плоскость 1PL и вторая плоскость 2PL располагаются под углом α относительно друг друга, и
указанный угол α представляет собой одно из фиксированного угла и регулируемого угла.
33. Устройство по п. 30, в котором контактный элемент 151 выполнен с возможностью размещения на выбранном места EMPL, которое располагается на участке тела BDY, включающего в себя кость BNE, ткань TSS и кожу SKN.
34. Устройство по п. 31, в котором контактный элемент 151 дополнительно предназначен для расположения на вспомогательном элементе 157, подлежащем удержанию в контакте с телом BDY.
35. Устройство по п. 30, в котором контактный элемент 151 дополнительно выполнен как шарнирный механизм 1511.
36. Устройство по п. 30, в котором контактный элемент 151 выполнен как шарнирный механизм 1511, имеющий по меньшей мере три степени свободы вращения для обеспечения повышенной легкости использования.
37. Устройство по п. 30, в котором
приводимое в действие двигателем медицинское приспособление 19 выполнено с возможностью приведения в действие посредством ручного механизированного привода 181, отдельно или в комбинации, по меньшей мере в одном из прямолинейного поступательного движения, вращательного движения и возвратно-поступательного движения.
| US 4235428 A, 25.11.1980 | |||
| Устройство для испытания газовых электрических разрядников | 1960 |
|
SU132334A1 |
| US 4848327 A, 18.07.1989 | |||
| US 4257411 A, 24.03.1981 | |||
| WO 2010054493 A1, 20.05.2010. | |||

