Область техники, к которой относится настоящее изобретение
Настоящее раскрытие относится к области хирургических инструментов, а более конкретно к передаточным, приводным и стерильным узлам, хирургическому инструменту и системе, и хирургическому роботу.
Предшествующий уровень техники настоящего изобретения
В последние годы, с ростом применения и развития робототехники, особенно вычислительной техники, все большее значение придается роли хирургических роботов в клинической практике. С одной стороны, малоинвазивный хирургический робот позволяет снизить физическую нагрузку на хирурга во время операции. С другой стороны, он может достичь цели точной хирургии, предлагая преимущества минимального травмирования, меньшего кровотечения, уменьшения послеоперационной инфекции и быстрого послеоперационного восстановления.
Часто необходимо стерилизовать хирургические инструменты, используемые в хирургии. Однако, поскольку сам хирургический робот включает в себя множество компонентов (например двигатели, датчики и так далее), которые не подходят для стерилизации с использованием обычных методов, невозможно стерилизовать всего хирургического робота. Поэтому для изоляции нестерилизуемых частей от стерилизуемых хирургических инструментов обычно используют стерильные пластины в сочетании со стерильными пакетами. Однако во время операции часто необходимо часто менять хирургические инструменты. Более того, при замене хирургического инструмента каждый раз необходимо разбирать и собирать хирургический инструмент и стерильную пластину. Следовательно, желательно обеспечить простое и эффективное передающее соединение между стерильной пластиной и хирургическим инструментом.
Заявка на патент Китая № CN106102640A относится к способу зацепления хирургического инструмента с приводом с дистанционным управлением, в котором соединение интерфейса передачи осуществляют посредством поворотной муфты между приводом каретки в манипуляторе инструмента и приводом инструмента в хирургическом инструменте. Однако такая конструкция связана со следующими недостатками: (1) Такая конструкция передает осевое усилие на привод тележки через упругий компонент, чтобы заставить привод тележки перемещаться в осевом направлении. Однако осевые перемещения привода каретки должны приводить к наличию окружного зазора по отношению к входному приводному валу, что приводит к ошибкам в хирургической точности и вредно для точной хирургии; (2) В таком решении привод каретки фрикционно соединен с соответствующим приводом инструмента. Это имеет тенденцию приводить к отказам муфты в некоторых особых положениях вращающегося диска (см. Параграф [0006] CN 106102641A); (3) для того, чтобы упругий компонент мог прикладывать осевое усилие к приводу каретки, необходимо предусмотреть неподвижные компоненты, относительные скользящие компоненты, ограничительные компоненты, точный скользящий желоб во всем устройстве, что увеличивает конструктивную сложность устройства. Кроме того, также требуется обеспечить достаточную осевую длину устройства для обеспечения устойчивости каретки, что делает устройство достаточно громоздким; (4) в таком решении различные функции аппарата могут быть реализованы только за счет сложных программ управления.
В заявке на патент Китая № CN103533908A упоминается интерфейс инструмента, который приводит в действие инструмент с помощью фрикционной передачи с конической конструкцией. Эта конструкция связана со следующими недостатками: (1) интерфейс может быть зацеплен с приводным двигателем при любом положении приводного диска, что делает невозможным определение начального положения инструментального наконечника и таким образом, делает невозможным получение системой робота информации об абсолютном положении терминала инструмента, что вредно для обеспечения безопасности во время операции; (2) фрикционная передача связана с риском проскальзывания. Как только произойдет проскальзывание, возникнет ошибка точности, которая может отрицательно сказаться на хирургических операциях.
Краткое раскрытие настоящего изобретения
Целью настоящего раскрытия является представление передаточных, приводных и стерильных узлов, хирургического инструмента, системы хирургических инструментов и хирургического робота, который обеспечивает быстрое и прочное зацепление между хирургическим инструментом и стерильной пластиной и позволяет избежать возникновения отказа соединения и повысить безопасность хирургического робота.
Для достижения указанной выше цели в настоящем раскрытии представлен передаточный узел для хирургического инструмента, содержащего первый передаточный диск и второй передаточный диск, причем:
первый передаточный диск имеет второй конец, а второй передаточный диск имеет третий конец, обращенный ко второму концу,
одна из торцевой стороны второго конца и торцевой стороны третьего конца имеет образованную на ней первую направляющую поверхность, другая из торцевой стороны второго конца и торцевой стороны третьего конца снабжена вторым зацепляющим компонентом, причем по меньшей мере один первый зацепляющий компонент предоставлен на первой направляющей поверхности, а второй зацепляющий компонент выполнен с возможностью зацепления с первым зацепляющим компонентом;
второй зацепляющий компонент выполнен с возможностью перемещения вдоль первой направляющей поверхности до зацепления второго зацепляющего компонента с первым зацепляющим компонентом, чтобы обеспечить передачу крутящего момента между первым передаточным диском и вторым передаточным диском.
Возможно, первая направляющая поверхность имеет по меньшей мере одну вершину и по меньшей мере одну впадину, которые распределены по окружности вдоль торцевой стороны конца, на котором образована первая направляющая поверхность, а во впадине первой направляющей поверхности предоставлен первый зацепляющий компонент.
Возможно, осевая проекция первой направляющей поверхности имеет диаметр больше или равный десятой части осевого расстояния от вершины до впадины первой направляющей поверхности.
Возможно, второй конец первого передаточного диска дополнительно снабжен первым установочным штифтом, проходящим в осевом направлении, а третий конец второго передаточного диска дополнительно снабжен первым установочным отверстием, проходящим в осевом направлении, причем первый установочный штифт и первое установочное отверстие выполнены с возможностью взаимодействия друг с другом для облегчения концентрического расположения первого передаточного диска и второго передаточного диска.
Возможно, первый зацепляющий компонент представляет собой углубление, а второй зацепляющий компонент представляет собой выступ, причем первая защитная стенка, окружающая выступ, предусмотрена на торцевой стороне, где предоставлен второй зацепляющий компонент, а первая защитная стенка является кольцеобразной и соединена с выступом;
и при этом осевая проекция торцевой стороны, где находится первая направляющая поверхность, имеет диаметр, меньше или равный внутреннему диаметру первой защитной стенки.
Возможно, второй зацепляющий компонент содержит первый направляющий участок и первый участок передачи движущей силы;
первый направляющий участок выполнен с возможностью контакта с первой направляющей поверхностью для направления скольжения второго зацепляющего компонента вдоль первой направляющей поверхности, а
первый участок передачи движущей силы выполнен с возможностью передачи движущей силы, когда первый зацепляющий компонент находится в зацеплении со вторым зацепляющим компонентом.
Возможно, каждая из осевой проекции первого зацепляющего компонента и осевой проекции первого участка передачи движущей силы имеет форму серпообразного эллипсоида, или
каждая из осевой проекции первого зацепляющего компонента и осевой проекции первого участка передачи движущей силы имеет форму веера, и веер, образованный первым зацепляющим компонентом, имеет угол больше или равный углу веера, образованного первым участком передачи движущей силы.
Возможно, второй зацепляющий компонент содержит первый направляющий участок, и при этом первый направляющий участок выполнен с возможностью контакта с первой направляющей поверхностью для направления скольжения второго зацепляющего компонента вдоль первой направляющей поверхности и для передачи движущей силы, когда второй зацепляющий компонент находится в зацеплении с первым зацепляющим компонентом.
Возможно, первый направляющий участок и первый зацепляющий компонент выполнены с возможностью поверхностного контакта для увеличения силы трения между ними.
Возможно, предусмотрено по меньшей мере два вторых зацепляющих компонента, и при этом первая направляющая поверхность и вторые зацепляющие компоненты выполнены таким образом, что, когда осевую внешнюю силу прикладывают ко второму передающему диску, а первая направляющая поверхность находится в контакте со вторыми зацепляющими компонентами, на вторые компоненты зацепления действуют неуравновешенные силы.
Возможно, каждый из вторых зацепляющих компонентов содержит первый направляющий участок, причем каждый первый направляющий участок содержит две клиновидные поверхности, которые образуют первую линию пересечения;
причем первая направляющая поверхность содержит несколько направляющих вспомогательных поверхностей, которые соединены последовательно, и соседние направляющие вспомогательные поверхности образуют вторую линию пересечения на вершинах первой направляющей поверхности; и
при этом первая и вторая линии пересечения выполнены таким образом, что, когда вторые зацепляющие компоненты находятся в контакте с первой направляющей поверхностью на вершинах первой направляющей поверхности, осевая проекция первой линии пересечения по меньшей мере частично совпадает с осевой проекцией соответствующей второй линии пересечения; или
первая и вторая линии пересечения выполнены таким образом, что, когда вторые зацепляющие компоненты находятся в контакте с первой направляющей поверхностью на вершинах первой направляющей поверхности, по меньшей мере две осевых проекции нескольких первых линий пересечения находятся на одной прямой, и по меньшей мере две осевых проекции нескольких вторых линий пересечения находятся на одной прямой.
Возможно, каждый из вторых зацепляющих компонентов содержит первый направляющий участок, причем каждый первый направляющий участок содержит две клиновидные поверхности и одну первую переходную поверхность между двумя клиновидными поверхностями, причем первая переходная поверхность разрезана группой плоских или изогнутых воображаемых режущих поверхностей, и между первой переходной поверхностью и группой плоских или изогнутых воображаемых режущих поверхностей образована группа линий пересечения разреза, и при этом первая линия пересечения образована в виде соединительной линии, образованной за счет соединения каждой из характерных точек группы линий пересечения разреза;
первая направляющая поверхность содержит несколько направляющих вспомогательных поверхностей, причем соседние направляющие вспомогательные поверхности соединены второй переходной поверхностью на вершине первой направляющей поверхности, причем вторая переходная поверхность разрезана группой плоских или изогнутых воображаемых режущих поверхностей, и между второй переходной поверхностью и группой плоских или изогнутых воображаемых режущих поверхностей образована группа линий пересечения разреза, и при этом вторая линия пересечения образована в виде соединительной линии, образованной за счет соединения каждой из характерных точек группы линий пересечения разреза; и
при этом несколько первых линий пересечения и несколько вторых линий пересечения выполнены таким образом, что, когда первый зацепляющий компонент находится в зацеплении со вторыми зацепляющими компонентами, осевая проекция первой линии пересечения по меньшей мере частично совпадает с осевой проекцией соответствующей второй линии пересечения; или
несколько первых линий пересечения и несколько вторых линий пересечения выполнены таким образом, что, когда первый зацепляющий компонент находится в зацеплении со вторыми зацепляющими компонентами, по меньшей мере две осевых проекции нескольких первых линий пересечения находятся на одной прямой, и по меньшей мере две осевых проекции нескольких вторых линий пересечения находятся на одной прямой.
Возможно, первая сопряженная поверхность образована на торцевой стороне, где находится второй зацепляющий компонент, а второй зацепляющий компонент предоставлен на первой сопряженной поверхности, причем первая сопряженная поверхность выполнена так, чтобы не препятствовать перемещению второго зацепляющего компонента вдоль первой направляющей поверхности и входить в зацепление с первым зацепляющим компонентом.
Возможно, первая сопряженная поверхность выполнена таким образом, что, когда второй зацепляющий компонент находится в зацеплении с первым зацепляющим компонентом, первая сопряженная поверхность по меньшей мере частично упирается в первую направляющую поверхность.
Возможно, первая направляющая поверхность имеет по меньшей мере одну вершину и по меньшей мере одну впадину, которые распределены по окружности вдоль торцевой стороны, где находится первая направляющая поверхность, а во впадине первой направляющей поверхности предоставлен первый зацепляющий компонент;
причем первая сопряженная поверхность имеет по меньшей мере одну вершину и по меньшей мере одну впадину, которые распределены по окружности вдоль соответствующей торцевой стороны, а второй зацепляющий компонент предоставлен на вершине первой сопряженной поверхности;
причем вершина первой сопряженной поверхности выполнена в соответствии со впадиной первой направляющей поверхности, а впадина первой сопряженной поверхности выполнена в соответствии с вершиной первой направляющей поверхности; и
впадина первой сопряженной поверхности выполнена так, чтобы не препятствовать зацеплению между первыми и вторыми зацепляющими компонентами.
Возможно, впадина первой сопряженной поверхности выполнена таким образом, что, когда первый передаточный диск находится в зацеплении со вторым передаточным диском, впадина первой сопряженной поверхности совсем не находится в контакте с соответствующей вершиной первой направляющей поверхности; или
впадина первой сопряженной поверхности не находится в контакте с соответствующей вершиной первой направляющей поверхности, при том что между двумя боковыми участками впадины первой сопряженной поверхности и двумя боковыми участками соответствующей вершины первой направляющей поверхности образован линейный контакт или поверхностный контакт.
Возможно, первая направляющая поверхность имеет по меньшей мере одну вершину и по меньшей мере одну впадину, которые распределены по окружности вдоль торцевой стороны, где находится первая направляющая поверхность, а во впадине первой направляющей поверхности предоставлен первый зацепляющий компонент;
причем вершина первой сопряженной поверхности выполнена в соответствии со впадиной первой направляющей поверхности, а впадина первой сопряженной поверхности выполнена в соответствии с вершиной первой направляющей поверхности; и
при этом первая сопряженная поверхность дополнительно снабжена первой вмещающей канавкой на ней, причем вмещающая канавка выполнена с возможностью размещения вершины первой направляющей поверхности.
Возможно, передаточный узел дополнительно содержит третий передаточный диск, причем первый передаточный диск, второй передаточный диск и третий передаточный диск соединены последовательно;
причем второй передаточный диск дополнительно имеет четвертый конец, противоположный третьему концу, а третий передаточный диск имеет пятый конец, расположенный торец к торцу с четвертым концом;
причем одна из торцевой стороны четвертого конца и торцевой стороны пятого конца имеет вторую направляющую поверхность, образованную на ней, а другая из торцевой стороны четвертого конца и торцевой стороны пятого конца снабжена четвертым зацепляющим компонентом, причем по меньшей мере один третий зацепляющий компонент предоставлен на второй направляющей поверхности, и четвертый зацепляющий компонент выполнен с возможностью зацепления третьего зацепляющего компонента, и
при этом четвертый зацепляющий компонент выполнен с возможностью скольжения вдоль второй направляющей поверхности до зацепления четвертого зацепляющего компонента с третьим зацепляющим компонентом, чтобы обеспечить передачу крутящего момента между вторым передаточным диском и третьим передаточным диском.
Возможно, первый зацепляющий компонент имеет форму и размер, идентичные третьему зацепляющему компоненту, причем второй зацепляющий компонент имеет форму и размер, идентичные четвертому зацепляющему компоненту, и при этом первая направляющая поверхность имеет форму, идентичную второй направляющей поверхности.
Возможно, передаточный узел содержит по меньшей мере два взаимно сцепленных вторых передаточных дисков, один из которых сцеплен с первым передаточным диском, а другой из которых сцеплен с третьим передаточным диском.
Возможно, четвертый зацепляющий компонент и второй зацепляющий компонент поочередно расположены вдоль направления по окружности передаточного узла.
Для достижения указанной выше цели в настоящем раскрытии представлена система хирургических инструментов для хирургического робота, содержащая:
коробку движущих сил, содержащую первый корпус коробки и приводной механизм, расположенный в первом корпусе коробки, причем первый корпус коробки снабжен по меньшей мере одним выходным отверстием;
хирургический инструмент, содержащий вал инструмента, инструментальный наконечник и инструментальный короб, причем инструментальный короб содержит второй корпус коробки и передаточный модуль, причем передаточный модуль расположен во втором корпусе коробки и выполнен с возможностью приведения в движение вала инструмента и/или инструментального наконечника, причем второй корпус коробки снабжен по меньшей мере одним входным отверстием; и
передаточный узел согласно определению выше,
первый передаточный диск расположен в выходном отверстии, а второй передаточный диск расположен во входном отверстии, и при этом, когда первый передаточный диск сцеплен со вторым передаточным диском, движущая сила, обеспечиваемая приводным механизмом, передается передаточным узлом в передаточный модуль, который, в свою очередь, приводит в движение вал инструмента и/или инструментальный наконечник.
Для достижения указанной выше цели в настоящем раскрытии дополнительно представлена система хирургических инструментов для хирургического робота, содержащая:
коробку движущих сил, содержащую первый корпус коробки и приводной механизм, расположенный в первом корпусе коробки, причем первый корпус коробки снабжен по меньшей мере одним выходным отверстием;
по меньшей мере одну стерильную пластину, каждая из которых снабжена по меньшей мере одним передаточным отверстием;
хирургический инструмент, содержащий вал инструмента, инструментальный наконечник и инструментальный короб, причем инструментальный короб содержит второй корпус коробки и передаточный модуль, причем передаточный модуль расположен во втором корпусе коробки и выполнен с возможностью приведения в движение вала инструмента и/или инструментального наконечника, и второй корпус коробки снабжен по меньшей мере одним входным отверстием; и
передаточный узел согласно определению выше, причем:
коробка движущих сил, стерильная пластина и инструментальный короб расположены последовательно;
первый передаточный диск предоставлен в выходном отверстии и дополнительно содержит первый конец напротив второго конца, причем первый конец первого передаточного диска соединен с приводным механизмом; при этом второй передаточный диск предоставлен в передаточном отверстии, а третий передаточный диск предоставлен во входном отверстии и дополнительно содержит шестой конец напротив пятого конца, причем шестой конец третьего передаточного диска соединен с передаточным модулем; и
когда первый передаточный диск, второй передаточный диск и третий передаточный диск сцеплены последовательно, движущая сила, обеспечиваемая приводным механизмом, передается передаточным узлом в передаточный модуль, который, в свою очередь, приводит в движение вал инструмента и/или инструментальный наконечник.
Возможно, система хирургических инструментов дополнительно содержит по меньшей мере один набор магнитов для корректировки положения,
причем третий передаточный диск имеет нулевое положение, и набор магнитов для корректировки положения выполнен с возможностью помощи в достижении третьим передаточным диском нулевого положения.
Возможно, набор магнитов для корректировки положения содержит первый магнит и второй магнит, причем первый магнит расположен на третьем передаточном диске, второй магнит расположен на инструментальном коробе, первый и второй магниты выполнены с возможностью притягивания друг к другу для помощи в достижении третьим передаточным диском нулевого положения.
Возможно, система хирургических инструментов дополнительно содержит по меньшей мере один набор магнитов против смещения,
причем передаточный узел имеет наихудшее положение, а набор магнитов против смещения выполнен с возможностью предотвращения попадания передаточного узла в наихудшее положение.
Возможно, набор магнитов против смещения содержит третий магнит и четвертый магнит, причем третий магнит предоставлен на втором передаточном диске, четвертый магнит предоставлен на стерильной пластине, и при этом третий и четвертый магниты расположены так, чтобы отталкивать друг друга, чтобы не пускать передаточный узел в наихудшее положение под действием силы отталкивания.
Возможно, система хирургических инструментов дополнительно содержит круговой ограничитель, выполненный с возможностью ограничения диапазона вращения третьего передаточного диска.
Возможно, круговой ограничитель содержит ограничительный выступ, предусмотренный на круговой боковой стенке третьего передаточного диска, и канавку скольжения, предусмотренную во внутренней стенке входного отверстия, и при этом ограничительный выступ предусмотрен внутри канавки скольжения и может перемещаться вдоль канавки скольжения.
Возможно, система хирургических инструментов дополнительно содержит осевой ограничитель, выполненный с возможностью предотвращения вытеснения второго передаточного диска со стерильной пластины.
Возможно, стерильная пластина содержит стерильную подложку и стерильную крышку, причем стерильная подложка соединена с коробкой движущих сил, стерильная подложка снабжена первым сквозным отверстием, стерильная крышка снабжена вторым сквозным отверстием, второе сквозное отверстие составляет передаточное отверстие вместе с первым сквозным отверстием, причем осевой ограничитель содержит ограничительный буртик, предусмотренный на круговой боковой стенке второго передаточного диска, и при этом секция второго сквозного отверстия рядом с первым сквозным отверстием имеет внутренний диаметр больше каждого из внутреннего диаметра секции второго сквозного отверстия, удаленного от первого сквозного отверстия, и внутреннего диаметра первого сквозного отверстия, и соответствует внешнему диаметру ограничительного буртика.
Для достижения указанной выше цели в настоящем раскрытии дополнительно представлен хирургический робот, содержащий систему хирургических инструментов согласно определению выше.
Возможно, хирургический робот дополнительно содержит роботизированную руку, причем к концу роботизированной руки прикреплена коробка движущих сил, а к коробке движущих сил прикреплен с возможностью отсоединения инструментальный короб.
Для достижения указанной выше цели в настоящем раскрытии дополнительно представлен хирургический робот, содержащий систему хирургических инструментов согласно определению выше.
Возможно, хирургический робот дополнительно содержит роботизированную руку, причем к концу роботизированной руки прикреплена коробка движущих сил, а на коробке движущих сил предоставлена стерильная пластина с возможностью отсоединения, при этом к стерильной пластине прикреплен инструментальный короб с возможностью отсоединения.
Для достижения указанной выше цели в настоящем раскрытии дополнительно представлен приводной узел для хирургического инструмента, который содержит:
первый корпус коробки, в котором предусмотрено по меньшей мере одно выходное отверстие;
приводной механизм, расположенный в первом корпусе коробки; и
первый передаточный диск, выполненный с возможностью зацепления со вторым передаточным диском, содержащим второй зацепляющий компонент, или с третьим передаточным диском, содержащим четвертый зацепляющий компонент, причем первый передаточный диск расположен в выходном отверстии, при этом первый передаточный диск имеет две противоположные концевые части, одна из которых соединена с приводным механизмом, другая из которых имеет направляющую поверхность, образованную на ее торцевой стороне, причем направляющая поверхность снабжена по меньшей мере одним первым зацепляющим компонентом, и направляющая поверхность выполнена с возможностью обеспечивать перемещение второго зацепляющего компонента второго передаточного диска или четвертого зацепляющего компонента третьего передаточного диска вдоль направляющей поверхности до их зацепления с первым зацепляющим компонентом.
Возможно, направляющая поверхность первого передаточного диска имеет по меньшей мере одну вершину и по меньшей мере одну впадину, которые расположены вдоль направления по окружности соответствующей концевой части, а во впадине направляющей поверхности предусмотрен первый зацепляющий компонент.
Возможно, направляющая поверхность первого передаточного диска снабжена по меньшей мере двумя первыми зацепляющими компонентами, которые расположены центрально-симметрично на направляющей поверхности.
Для достижения указанной выше цели в настоящем раскрытии дополнительно представлен приводной узел для хирургического инструмента, который содержит:
первый корпус коробки, в котором предусмотрено по меньшей мере одно выходное отверстие;
приводной механизм, расположенный в первом корпусе коробки; и
первый передаточный диск, выполненный с возможностью зацепления со вторым передаточным диском, содержащим первую направляющую поверхность и первый зацепляющий компонент, или с третьим передаточным диском, содержащим вторую направляющую поверхность и третий зацепляющий компонент, причем первый передаточный диск расположен в выходном отверстии, при этом первый передаточный диск имеет две противоположные концевые части, одна из которых соединена с приводным механизмом, а другая из которых имеет по меньшей мере один второй зацепляющий компонент, образованный на ее торцевой стороне, причем второй зацепляющий компонент выполнен с возможностью перемещения вдоль первой направляющей поверхности до его зацепления с первым зацепляющим компонентом или с возможностью перемещения вдоль второй направляющей поверхности до его зацепления с третьим зацепляющим компонентом.
Возможно, первая сопряженная поверхность образована на торцевой стороне другой из концевых частей первого передаточного диска, и при этом первая сопряженная поверхность имеет по меньшей мере одну вершину и по меньшей мере одну впадину, которые расположены вдоль направления по окружности торцевой стороны, а второй зацепляющий компонент расположен на вершине первой сопряженной поверхности.
Для достижения указанной выше цели в настоящем раскрытии дополнительно представлен стерильный узел, содержащий:
по меньшей мере одну стерильную пластину, снабженную по меньшей мере одним передаточным отверстием; и
по меньшей мере один второй передаточный диск, выполненный с возможностью зацепления с первым передаточным диском и третьим передаточным диском, причем второй передаточный диск расположен внутри передаточного отверстия, второй передаточный диск имеет две противоположные концевые части, а по меньшей мере одна из концевых частей снабжена направляющей поверхностью на ее торцевой стороне, причем каждая из двух концевых частей второго передаточного диска снабжена по меньшей мере одним зацепляющим компонентом на соответствующей торцевой стороне, и при этом направляющая поверхность и зацепляющие компоненты выполнены с возможностью зацепления второго передаточного диска с каждым из первого и третьего передаточных дисков.
Возможно, направляющая поверхность второго передаточного диска имеет по меньшей мере одну вершину и по меньшей мере одну впадину, которые расположены вдоль направления по окружности соответствующей концевой части, а во впадине направляющей поверхности расположен зацепляющий компонент (компоненты), предусмотренный на направляющей поверхности.
Возможно, каждая из двух концевых частей второго передаточного диска имеет направляющую поверхность, образованную на соответствующей торцевой стороне, а на каждой направляющей поверхности предусмотрен по меньшей мере один зацепляющий компонент, причем зацепляющий компонент представляет собой углубление.
Возможно, только одна из концевых частей второго передаточного диска имеет направляющую поверхность, образованную на ее торцевой стороне, а зацепляющий компонент, предусмотренный на направляющей поверхности, представляет собой углубление, и при этом зацепляющий компонент, предусмотренный на торцевой стороне другой из концевых частей, представляет собой выступ.
Возможно, стерильный узел дополнительно содержит по меньшей мере один набор магнитов против смещения,
причем передаточный узел имеет наихудшее положение, а набор магнитов против смещения выполнен с возможностью предотвращения попадания передаточного узла в наихудшее положение.
Возможно, стерильный узел содержит по меньшей мере две стерильные пластины, уложенные вместе, а передаточные отверстия по меньшей мере в двух стерильных пластинах выровнены друг с другом, и каждое из них снабжено одним передаточным диском.
Возможно, стерильный узел дополнительно содержит осевой ограничитель, выполненный с возможностью предотвращения вытеснения передаточного диска из передаточного отверстия.
Возможно, стерильная пластина содержит стерильную подложку и стерильную крышку, причем стерильная подложка выполнена с возможностью соединения с коробкой движущих сил, стерильная подложка снабжена первым сквозным отверстием, стерильная крышка снабжена вторым сквозным отверстием, второе сквозное отверстие составляет передаточное отверстие вместе с первым сквозным отверстием, причем осевой ограничитель содержит ограничительный буртик, предусмотренный на круговой боковой стенке второго передаточного диска, и при этом секция второго сквозного отверстия рядом с первым сквозным отверстием имеет внутренний диаметр больше каждого из внутреннего диаметра секции второго сквозного отверстия, удаленного от первого сквозного отверстия, и внутреннего диаметра первого сквозного отверстия, и соответствует внешнему диаметру ограничительного буртика.
Для достижения указанной выше цели в настоящем раскрытии дополнительно представлен стерильный узел, который содержит:
по меньшей мере одну стерильную пластину, каждая из которых снабжена по меньшей мере одним передаточным отверстием; и
по меньшей мере один второй передаточный диск, выполненный с возможностью зацепления с первым передаточным диском, содержащим первую направляющую поверхность и первый зацепляющий компонент, и с третьим передаточным диском, содержащим вторую направляющую поверхность и третий зацепляющий компонент, причем второй передаточный диск расположен в передаточном отверстии, при этом второй передаточный диск имеет две противоположные концевые части, каждая из которых имеет по меньшей мере один зацепляющий компонент, образованный на ее торцевой стороне, причем зацепляющие компоненты выполнены с возможностью зацепления второго передаточного диска с каждым из первого и третьего передаточных дисков.
Возможно, каждая из двух противоположных концевых частей второго передаточного диска имеет сопряженную поверхность, образованную на соответствующей торцевой стороне, и сопряженная поверхность снабжена по меньшей мере одной вершиной и по меньшей мере одной впадиной, которые расположены вдоль направления по окружности соответствующей торцевой стороны, и при этом каждый из зацепляющих компонентов предоставлен на вершине соответствующей сопряженной поверхности.
Для достижения указанной выше цели в настоящем раскрытии дополнительно представлен узел инструментального короба для хирургического инструмента, содержащего вал инструмента и инструментальный наконечник, который содержит:
инструментальный короб, содержащий второй корпус коробки и передаточный модуль, расположенный во втором корпусе коробки, причем передаточный модуль выполнен с возможностью приведения в движение вала инструмента и/или инструментального наконечника, при этом второй корпус коробки имеет по меньшей мере одно обеспеченное в нем входное отверстие; и
третий передаточный диск, выполненный с возможностью зацепления с первым передаточным диском, содержащим второй зацепляющий компонент, или со вторым передаточным диском, содержащим четвертый зацепляющий компонент, причем третий передаточный диск расположен во входном отверстии, третий передаточный диск имеет две противоположные концевые части, одна из которых соединена с передаточным модулем, а другая из которых имеет направляющую поверхность, образованную на ее торцевой стороне, причем направляющая поверхность снабжена по меньшей мере одним третьим зацепляющим компонентом, и направляющая поверхность выполнена с возможностью перемещения второго зацепляющего компонента первого передаточного диска вдоль направляющей поверхности до его зацепления с третьим зацепляющим компонентом или с возможностью перемещения четвертого зацепляющего компонента второго передаточного диска вдоль направляющей поверхности до его зацепления с третьим зацепляющим компонентом.
Возможно, направляющая поверхность третьего передаточного диска имеет по меньшей мере одну вершину и по меньшей мере одну впадину, которые расположены вдоль направления по окружности соответствующей одной из концевых частей, и при этом во впадине направляющей поверхности предоставлен третий зацепляющий компонент.
Возможно, передаточный модуль содержит вращающийся элемент, гибкий элемент и группу направляющих шкивов, причем группа направляющих шкивов выполнена с возможностью изменения направления продолжения гибкого элемента, вращающийся элемент выполнен с возможностью приведения во вращение инструментального наконечника посредством гибкого элемента, причем вращающийся элемент соединен с возможностью отсоединения с третьим передаточным диском или выполнен в виде единого целого с ним.
Возможно, хирургический инструмент дополнительно содержит по меньшей мере один набор магнитов для корректировки положения,
третий передаточный диск имеет нулевое положение, и набор магнитов для корректировки положения выполнен с возможностью помощи в достижении третьим передаточным диском нулевого положения.
Возможно, хирургический инструмент дополнительно содержит круговой ограничитель, выполненный с возможностью ограничения диапазона вращения третьего передаточного диска.
Для достижения указанной выше цели в настоящем раскрытии дополнительно представлен узел инструментального короба для хирургического инструмента, содержащего вал инструмента и инструментальный наконечник, который содержит:
инструментальный короб, содержащий второй корпус коробки и передаточный модуль, расположенный во втором корпусе коробки, причем передаточный модуль выполнен с возможностью приведения в движение вала инструмента и/или инструментального наконечника, инструментальный короб имеет по меньшей мере одно предоставленное в нем входное отверстие; и
третий передаточный диск, выполненный с возможностью зацепления с первым передаточным диском, содержащим первую направляющую поверхность и первый зацепляющий компонент, или со вторым передаточным диском, содержащим вторую направляющую поверхность и третий зацепляющий компонент, причем третий передаточный диск расположен во входном отверстии, третий передаточный диск имеет две противоположные концевые части, одна из которых соединена с передаточным модулем, а другая из которых имеет по меньшей мере один четвертый зацепляющий компонент, образованный на ее торцевой стороне, причем четвертый зацепляющий компонент выполнен с возможностью перемещения вдоль первой направляющей поверхности до его зацепления с первым зацепляющим компонентом первого передаточного диска или с возможностью перемещения вдоль второй направляющей поверхности до его зацепления с третьим зацепляющим компонентом второго передаточного диска.
Возможно, другая из двух противоположных концевых частей имеет первую сопряженную поверхность, образованную на ее торцевой стороне, причем первая сопряженная поверхность имеет по меньшей мере одну вершину и по меньшей мере одну впадину, которые расположены вдоль направления по окружности соответствующей торцевой стороны, и при этом на вершине первой сопряженной поверхности предоставлен четвертый зацепляющий компонент.
По сравнению с предшествующим уровнем техники передаточные, приводные и стерильные узлы, хирургический инструмент, система хирургических инструментов и хирургический робот согласно настоящему раскрытию имеет следующие преимущества:
Во-первых, передаточный узел для хирургического инструмента содержит по меньшей мере первый передаточный диск и второй передаточный диск. Первый передаточный диск имеет второй конец, а второй передаточный диск имеет третий конец, расположенный торец к торцу со вторым концом. Торцевая сторона второго или третьего конца имеет образованную на ней первую направляющую поверхность, а на первой направляющей поверхности представлен по меньшей мере один первый зацепляющий компонент. Кроме того, другая торцевая сторона второго или третьего конца снабжена вторым зацепляющим компонентом, который может входить в зацепление с первым зацепляющим компонентом. Второй зацепляющий компонент выполнен с возможностью перемещения вдоль первой направляющей поверхности до его зацепления с первым зацепляющим компонентом, чтобы обеспечить передачу крутящего момента между первым передаточным диском и вторым передаточным диском. Направляющая функция первой направляющей поверхности и зацепляющая конфигурация между первыми и вторыми зацепляющими компонентами позволяет избежать возникновения отказа зацепления. Кроме того, комбинация первой направляющей поверхности и второго зацепляющего компонента позволяет обеспечить быстрое зацепление без установки дополнительной программы управления.
Во-вторых, передаточный узел дополнительно содержит третий передаточный диск. Первый передаточный диск, второй передаточный диск и третий передаточный диск соединены последовательно. Второй передаточный диск дополнительно имеет четвертый конец, противоположный третьему концу, а третий передаточный диск имеет пятый конец, расположенный торец к торцу с четвертым концом. Торцевая сторона четвертого или пятого концов имеет вторую направляющую поверхность, образованную на ней, а на второй направляющей поверхности предоставлен по меньшей мере один третий зацепляющий компонент. Кроме того, другая торцевая сторона четвертого или пятого концов снабжена четвертым зацепляющим компонентом, который может входить в зацепление с третьим зацепляющим компонентом. Четвертый зацепляющий компонент выполнен с возможностью скольжения вдоль второй направляющей поверхности до зацепления четвертого зацепляющего компонента с третьим зацепляющим компонентом, чтобы обеспечить передачу крутящего момента между вторым передаточным диском и третьим передаточным диском. Направляющая функция второй направляющей поверхности и зацепляющая конфигурация между третьим и четвертым зацепляющими компонентами позволяют оборудовать систему хирургических инструментов стерильной пластиной для изоляции приводного узла от хирургического инструмента, так что нет необходимости дезинфицировать всю систему хирургического робота.
В-третьих, за счет предоставления первой и второй сопряженных поверхностей и установки второго и четвертого зацепляющих компонентов на первой и второй сопряженных поверхностях, соответственно, можно улучшить состояние напряжения между вторым и четвертым зацепляющими компонентами во время передачи и повысить конструктивную прочность передаточных дисков для продления срока их службы.
В-четвертых, первая защитная стенка, соединенная со вторым зацепляющим компонентом и расположенная на периферии второго зацепляющего компонента, позволяет не только улучшить состояние напряжения второго зацепляющего компонента во время передачи, но также уменьшить осевой размер всего передаточного узла, обеспечивая за счет этого увеличение коэффициента использования осевого размера и дополнительное уменьшение веса передаточного узла. Аналогично, вторая защитная стенка, соединенная с четвертым зацепляющим компонентом и расположенная на периферии четвертого зацепляющего компонента, позволяет улучшить состояние напряжения второго зацепляющего компонента во время передачи, обеспечивая за счет этого увеличение коэффициента использования осевого размера и дополнительное уменьшение веса передаточного узла.
Краткое описание чертежей
На фиг. 1 схематично показан работающий хирургический робот согласно варианту осуществления настоящего раскрытия.
На фиг. 2a представлена схема конструкции системы хирургических инструментов согласно варианту осуществления настоящего раскрытия.
На фиг. 2b схематично показана система хирургических инструментов фиг. 2a в разобранном виде.
На фиг. 2c представлено схематичное изображение в разобранном виде системы хирургических инструментов фиг. 2a, на котором не показаны некоторые элементы.
На фиг. 3 схематично показана система хирургических инструментов фиг. 2a, причем стерильная подложка, стерильная крышка и набор магнитов для корректировки положения представлены в разобранном виде.
На фиг. 4 представлен вид в частичном поперечном разрезе стерильного узла согласно варианту осуществления настоящего раскрытия.
На фиг. 5a представлена схема конструкции передаточного узла согласно варианту осуществления 1 настоящего раскрытия.
На фиг. 5b представлена схема конструкции первого передаточного диска передаточного узла фиг. 5a с одного направления.
На фиг. 5c представлена схема конструкции первого передаточного диска фиг. 5b с другого направления.
На фиг. 5d представлена схема конструкции второго передаточного диска передаточного узла фиг. 5a с одного направления.
На фиг. 5e представлена схема конструкции второго передаточного диска фиг. 5d с другого направления.
На фиг. 5f представлена схема конструкции третьего передаточного диска передаточного узла фиг. 5a с одного направления.
На фиг. 5g представлена схема конструкции третьего передаточного диска фиг. 5f с другого направления.
На фиг. 6a и 6b схематично показаны клиновидные поверхности направляющего участка, соединенные переходной поверхностью согласно варианту осуществления 1, в котором линии пересечения получены с помощью воображаемых режущих поверхностей.
На фиг. 7a представлено схематичное изображение в разобранном виде варианта передаточного узла фиг. 5a.
На фиг. 7b представлено схематичное изображение в разобранном виде передаточного узла фиг. 7a с другого направления.
На фиг. 7c представлено схематичное изображение в разобранном виде другого варианта передаточного узла фиг. 5a.
На фиг. 7d представлено схематичное изображение в разобранном виде передаточного узла фиг. 7c с другого направления.
На фиг. 7e представлено схематичное изображение в разобранном виде дополнительного варианта передаточного узла фиг. 5a.
На фиг. 7f представлено схематичное изображение в разобранном виде передаточного узла фиг. 7e с другого направления.
На фиг. 7g представлено схематичное изображение в разобранном виде дополнительного варианта передаточного узла фиг. 5a.
На фиг. 7h представлено схематичное изображение в разобранном виде передаточного узла фиг. 7g с другого направления.
На фиг. 8a представлена схема конструкции передаточного узла согласно варианту осуществления 2 настоящего раскрытия.
На фиг. 8b представлена схема конструкции первого передаточного диска передаточного узла фиг. 8a с одного направления.
На фиг. 8c представлена схема конструкции первого передаточного диска фиг. 8b с другого направления.
На фиг. 8d представлена схема конструкции второго передаточного диска передаточного узла фиг. 8a с одного направления.
На фиг. 8e представлена схема конструкции второго передаточного диска фиг. 8d с другого направления.
На фиг. 8f представлена схема конструкции третьего передаточного диска передаточного узла фиг. 8a с одного направления.
На фиг. 8g представлена схема конструкции третьего передаточного диска фиг. 8f с другого направления.
На фиг. 9a представлена схема конструкции передаточного узла согласно варианту осуществления 3 настоящего раскрытия.
На фиг. 9b представлено схематичное изображение в разобранном виде передаточного узла фиг. 9a.
На фиг. 10 представлена схема конструкции передаточного узла согласно варианту осуществления 4 настоящего раскрытия.
На фиг. 11 представлена схема конструкции приводного короба согласно варианту осуществления настоящего раскрытия.
На фиг. 12 представлена схема конструкции стерильного узла согласно варианту осуществления настоящего раскрытия.
На фиг. 13 представлена схема конструкции передаточного диска в стерильном узле фиг. 12, в котором каждая из двух торцевых сторон передаточного диска образована в виде направляющей поверхности.
На фиг. 14 представлена схема конструкции передаточного диска в стерильном узле фиг. 12, в котором одна торцевая сторона передаточного диска образована в виде направляющей поверхности, а другая торцевая сторона передаточного диска образована в виде сопряженной поверхности.
На фиг. 15 представлена схема конструкции передаточного диска в стерильном узле фиг. 12, в котором одна торцевая сторона передаточного диска образована в виде направляющей поверхности, а другая торцевая сторона передаточного диска имеет, образованную на ней защитную стенку.
На фиг. 16 представлена схема конструкции стерильного узла согласно варианту осуществления настоящего раскрытия, в котором расположены две стерильные пластины.
На фиг. 17 представлена схема конструкции хирургического инструмента согласно варианту осуществления настоящего раскрытия.
На фиг. 18 представлен схематичный укрупненный вид секции A на фиг. 17.
На фигурах
10 - консоль хирурга; 20 - хирургическая стойка; 30 - пациентская стойка;
100 - приводной узел;
200 - стерильный узел;
300 - хирургический инструмент;
310 - инструментальный наконечник; 320- вал инструмента;
400 - троакар;
1000 - передаточный узел;
1100 - первый передаточный диск;
1110 - первая соединительная бабка; 1120 - второе соединительное отверстие; 1130- фиксирующее отверстие; 1140 - первый установочный штифт;
1200 - второй передаточный диск;
1210 - первое установочное отверстие; 1220 - второй установочный штифт; 1230- ограничительный буртик;
1300 - третий передаточный диск;
1310 - вторая соединительная бабка; 1320 - второе соединительное отверстие; 1330 - второе установочное отверстие; 1340 - принимающее отверстие; 1350 - ограничительный выступ;
1010 - первая направляющая поверхность;
1011, 1011' - первые направляющие вспомогательные поверхности;
1020 - первый зацепляющий компонент;
1030 - второй зацепляющий компонент;
1031 - первый участок передачи движущей силы; 1032 - первый направляющий участок;
1040 - вторая направляющая поверхность;
1050 - третий зацепляющий компонент;
1060 - четвертый зацепляющий компонент;
1061 - вторая передаточная секция; 1062 - второй направляющий участок;
1001 - первая сопряженная поверхность; 1002 - первая вмещающая канавка; 1003 - вторая сопряженная поверхность; 1004 - вторая вмещающая канавка; 1005 - первая защитная стенка; 1006 - вторая защитная стенка;
2000 - приводной механизм;
3000 - первый корпус коробки;
4000 - стерильная пластина; 4000a - первая стерильная пластина; 4000b - вторая стерильная пластина;
4100 - стерильная подложка; 4200 - стерильная крышка;
5000 - второй корпус коробки;
6000 - набор магнитов для корректировки положения;
6100 - первый магнит; 6200 - второй магнит;
7000 - набор магнитов против смещения;
7100 - третий магнит; 7200 - четвертый магнит.
Подробное раскрытие настоящего изобретения
Чтобы сделать цели, преимущества и признаки настоящего раскрытия более очевидными, передаточный узел, система хирургических инструментов, хирургический робот, приводной узел, стерильный узел и хирургический инструмент, предложенные в настоящем раскрытии, описаны ниже более подробно в сочетании с чертежами. Следует отметить, что чертежи представлены в очень упрощенной форме, не обязательно выполненной в точном масштабе, с единственной целью помочь объяснить варианты осуществления настоящего раскрытия более удобным и понятным способом.
В рамках настоящего изобретения и в прилагаемой формуле изобретения формы единственного числа включают ссылки во множественном числе, и если контекст явно не следует иное, фраза «несколько» использована в значении, включающем «два или более». В рамках настоящего изобретения и в прилагаемой формуле изобретения термин «или» обычно включает в себя смысл «и/или», если в контексте явно не указано иное. Далее, термины «сборка», «связь» и «соединение» следует толковать в широком смысле. Например, соединение может быть фиксированным, разъемным или неотъемлемым соединением, механическим или электрическим соединением, прямым или непрямым соединением с одним или несколькими промежуточными элементами или внутренней связью или взаимодействием между двумя отдельными элементами. Специалисты в данной области могут понять конкретные значения вышеупомянутых терминов в соответствии с конкретными обстоятельствами. На прилагаемых чертежах одинаковые или аналогичные ссылочные позиции относятся к одним и тем же или аналогичным элементам.
На фиг. 1 схематично показан работающий хирургический робот согласно варианту осуществления настоящего раскрытия. Как показано на фиг. 1, хирургический робот содержит станцию управления и станцию рабочих органов. Станция управления содержит консоль 10 хирурга, снабженную ведущими манипуляторами, тогда как станция рабочих органов содержит хирургическую стойку 20, пациентскую стойку 30 и другое оборудование. Пациент лежит на хирургической стойке 20 для хирургической операции. Пациентская стойка 30 снабжена роботизированными руками (не показанными на фигурах) для установки систем хирургических инструментов. Каждый элемент из роботизированной руки и системы хирургических инструментов имеет заданную отображающую взаимосвязь с ведущим манипулятором, так что между ним и каждой роботизированной рукой образовано отношение ведущий-ведомый. Каждый элемент из роботизированной руки и системы хирургических инструментов двигается в разных направлениях, следуя за движениями ведущих манипуляторов, совершая хирургическую операцию.
Как показано на фиг. 2a и 2b, каждая система хирургических инструментов содержит приводной узел 100, стерильный узел 200 и хирургический инструмент 300. Хирургический инструмент 300 содержит узел инструментального короба и инструментальный наконечник 310, соединенный с узлом инструментального короба. Узел инструментального короба снабжен интерфейсом передачи. Приводной узел 100 выполнен с возможностью приведения в действие хирургического инструмента 300. Стерильный узел 200 выполнен с возможностью обеспечения среды передачи движущей силы для интерфейсов передачи приводного узла 100 и узла инструментального короба, которые расположены на противоположных сторонах стерильного пакета (например на стерильной стороне и нестерильной стороне). Интерфейс передачи, расположенный в узле инструментального короба, принимает крутящий момент, передаваемый из приводного узла 100, и приводит в движение различные сочленения инструментального наконечника 310. Хирургический инструмент 300 дополнительно содержит вал 320 инструмента. если вал 320 инструмента соединен с возможностью вращения с узлом инструментального короба, интерфейс передачи расположенная в узле инструментального короба, принимает крутящий момент, передаваемый из приводного узла 100, и приводит вал 320 инструмента во вращение вокруг своей оси.
В общем, как приводной узел 100, так и стерильный узел 200 снабжены интерфейсами передачи. Интерфейсы передачи приводного узла 100 и стерильного узла 200 соответствуют интерфейсам передачи узла инструментального короба. Эти интерфейсы передачи образуют передаточный узел за счет соединения друг с другом для передачи движущей силы, обеспечиваемой приводным узлом 100 на инструментальный наконечник 310, таким образом вызывая выполнение инструментальным наконечником 310 разных движений. Кроме того, приводной узел 100 содержит коробку движущих сил и передаточные диски, расположенные на коробке движущих сил. Коробка движущих сил прикреплена к наконечнику роботизированной руки. Например, наконечник роботизированной руки содержит подвижное сочленение, а на подвижном сочленении расположена коробка движущих сил таким образом, чтобы двигаться при движениях подвижного сочленения. Стерильный узел 200 расположен на стерильном пакете и соединен с приводным узлом 100 с возможностью отсоединения. Кроме того, стерильный узел 200 содержит стерильную пластину и передаточные диски, предусмотренные на стерильной пластине. Стерильная пластина расположена с возможностью отсоединения на коробке движущих сил. Хирургический инструмент 300 соединен с возможностью отсоединения со стерильным узлом 200 через узел инструментального короба. Кроме того, узел инструментального короба дополнительно содержит инструментальный короб и передаточные диски, предусмотренные на инструментальном коробе, и инструментальный короб соединен с возможностью отсоединения со стерильной пластиной. В альтернативном варианте осуществления хирургический робот может быть полностью стерилизован с использованием специального способа, например стерилизации озоном, стерилизации пероксидом водорода и так далее). В этом случае система хирургических инструментов может содержать приводной узел 100 и хирургический инструмент 300. Соответственно, передаточный узел состоит из соединения интерфейсов передачи приводного узла 100 с соответствующими интерфейсами передачи узла инструментального короба, таким образом, чтобы передавать движущую силу, обеспечиваемую приводным узлом 100, прямо на инструментальный наконечник 310.
Первой целью вариантов осуществления настоящего раскрытия является предоставление передаточного узла 1000, подходящего для использования в системе хирургических инструментов хирургического робота. Как показано на фиг. 5a-5g, передаточный узел 1000, представленный в вариантах осуществления настоящего раскрытия, содержит первый передаточный диск 1100, второй передаточный диск 1200 и третий передаточный диск 1300, которые расположены последовательно. Первый передаточный диск 1100 имеет первый конец и второй конец напротив первого конца. Второй передаточный диск 1200 имеет третий конец и четвертый конец напротив третьего конца. Третий конец и второй конец расположены торец к торцу. Третий передаточный диск 1300 имеет пятый конец и шестой конец напротив пятого конца. Пятый конец и четвертый конец расположены торец к торцу.
Первая направляющая поверхность 1010 предоставлен на одной из торцевой стороны второго конца и торцевой стороны третьего конца. Первый зацепляющий компонент 1020 предоставлен на первой направляющей поверхности 1010, а второй зацепляющий компонент 1030 предоставлен на другой из торцевой стороны второго конца и торцевой стороны третьего конца. Вторая направляющая поверхность 1040 предоставлена на одной из торцевой стороны четвертого конца и торцевой стороны пятого конца. Третий зацепляющий компонент 1050 предоставлен на второй направляющей поверхности 1040, а четвертый зацепляющий компонент 1060 предоставлен на другой из торцевой стороны четвертого конца и торцевой стороны пятого конца.
Второй зацепляющий компонент 1030 выполнен с возможностью скольжения вдоль первой направляющей поверхности 1010 до их зацепления с первым зацепляющим компонентом 1020, таким образом, чтобы обеспечить передачу крутящего момента между первым и вторым передаточными дисками. Четвертый зацепляющий компонент 1060 выполнен с возможностью скольжения вдоль второй направляющей поверхности 1040 до его зацепления с третьим зацепляющим компонентом 1050 таким образом, чтобы обеспечить передачу крутящего момента между вторым и третьим передаточными дисками.
Конфигурация первой направляющей поверхности 1010 для определения направления скольжения второго зацепляющего компонента 1030 обеспечивает точное перемещение второго зацепляющего компонента 1030 в положение, соответствующее первому зацепляющему компоненту 1020, и зацепление с первым зацепляющим компонентом 1020, позволяя таким образом избежать отказа соединения, вызванного смещением между первым передаточным диском 1100 и вторым передаточным диском 1200. Аналогичным образом, за счет конфигурации второй направляющей поверхности 1040 для направления движения четвертого зацепляющего компонента 1060 можно обеспечить быстрое зацепление между четвертым зацепляющим компонентом 1060 и третьим зацепляющим компонентом 1050, обеспечивая за счет этого соединение между вторым передаточным диском 1200 и третьим передаточным диском 1300.
При практическом использовании, как показано на фиг. 2b, первый передаточный диск 1100 находится в интерфейсе передачи приводного узла 100, и первый конец первого передаточного диска соединен с приводным механизмом. Второй передаточный диск 1200 находится в интерфейсе передачи стерильного узла 200. Третий передаточный диск 1300 находится в интерфейсе передачи узла инструментального короба и соединен с инструментальным наконечником 310 через механизм передачи. В связи с этим первый передаточный диск 1100, второй передаточный диск 1200 и третий передаточный диск 1300 сцеплены друг с другом с получением передаточного узла 1000 и передают движущую силу, обеспечиваемую приводным механизмом, на инструментальный наконечник 310 для управления движения инструментального наконечника 310.
Кроме того, первый зацепляющий компонент 1020 может представлять собой углубление, а второй зацепляющий компонент 1030 может представлять собой выступ, соответствующий углублению. Третий зацепляющий компонент 1050 может представлять собой углубление, а четвертый зацепляющий компонент 1060 может представлять собой выступ, соответствующий углублению.
Кроме того, первая направляющая поверхность имеет по меньшей мере одну вершину и по меньшей мере одну впадину, которые распределены по окружности вдоль торцевой стороны конца, на котором образована первая направляющая поверхность. Вторая направляющая поверхность имеет по меньшей мере одну вершину и по меньшей мере одну впадину, которые распределены по окружности вдоль торцевой стороны конца, на котором образована вторая направляющая поверхность. Кроме того, во впадине первой направляющей поверхности 1010 предоставлен первый зацепляющий компонент 1020, а во впадине второй направляющей поверхности 1040 предоставлен третий зацепляющий компонент 1050. В связи с этим второй зацепляющий компонент 1030 может скользить по первой направляющей поверхности 1010 вдоль направления от вершины к впадине до зацепления второго зацепляющего компонента с первым зацепляющим компонентом 1020. В этом процессе, то есть процессе скольжения из конфигурации взаимного смещения на вершине первой направляющей поверхности в конфигурацию взаимного зацепления во впадине первой направляющей поверхности, осевой размер передаточного узла 1000 постепенно уменьшается, то есть изменение осевого положения между вершиной и впадиной первой направляющей поверхности 1010 позволяет компенсировать изменение осевого размерa передаточного узла 1000 вследствие зацепления первого зацепляющего компонента 1020 со вторым зацепляющим компонентом 1300. Аналогичным образом, четвертый зацепляющий компонент 1060 может скользить по второй направляющей поверхности 1040 вдоль направления от вершины к впадине до зацепления четвертого зацепляющего компонента с третьим зацепляющим компонентом 1050. Изменение осевого положения между вершиной и впадиной второй направляющей поверхности 1040 позволяет компенсировать изменение осевого размерa передаточного узла 1000 вследствие зацепления третьего зацепляющего компонента 1050 с четвертым зацепляющим компонентом 1060.
Кроме того, на первой направляющей поверхности 1010 может иметься один или несколько первых зацепляющих компонентов 1020. Предпочтительно, на соответствующей торцевой стороне центрально-симметрично расположены по меньшей мере два первых зацепляющих компонента 1020. Аналогичным образом, на вторых направляющих поверхностях 1040 может иметься один или несколько третьих зацепляющих компонентов 1050. Предпочтительно, на соответствующей торцевой стороне центрально-симметрично расположены по меньшей мере два третьих зацепляющих компонента 1050.
Кроме того, форма и размер первой направляющей поверхности 1010 и второй направляющей поверхности 1040 могут быть идентичными или нет. Количества вершин и впадин на первой направляющей поверхности 1010 и второй направляющей поверхности 1040 могут быть идентичными или нет. Количество, форма и размер первых зацепляющих компонентов 1020 и третьих зацепляющих компонентов 1050 могут быть идентичными или нет. Вторые зацепляющие компоненты 1030 могут иметься в количестве, сопоставимом с количеством первых зацепляющих компонентов 1020. то есть количество вторых зацепляющих компонентов 1030 может быть либо таким же как количество первых зацепляющих компонентов 1020, либо нет. В последнем случае количество первых зацепляющих компонентов 1020 больше количества вторых зацепляющих компонентов 1030, и вторые зацепляющие компоненты 1030 расположены таким же образом, как по меньшей мере некоторые из первых зацепляющих компонентов 1030. Аналогичным образом, четвертые зацепляющие компоненты 1060 могут иметься в количестве, сопоставимом с количеством третьих зацепляющих компонентов 1050. Конкретные конфигурации в этих аспектах могут определяться практическими потребностями.
Конструкция передаточного узла 1000 будет описана подробно ниже со ссылкой на приложенные чертежи. В следующих разных вариантах осуществления первая направляющая поверхность 1010 идентична второй направляющей поверхности 1040. Соответственно, количество первых зацепляющих компонентов 1020 такое же как количество третьих зацепляющих компонентов 1050, и каждый из первых зацепляющих компонентов 1020, вторых зацепляющих компонентов 1030, третьих зацепляющих компонентов 1050 и четвертых зацепляющих компонентов 1060 центрально-симметрично представлен на соответствующих торцевых сторонах. Однако настоящее раскрытие не ограничено этими конфигурациями. Кроме того, для облегчения описания плоскость, перпендикулярная оси передаточного узла 1000, ниже называется «эталонная плоскость».
Далее сделана ссылка на фиг. 5a-5g. На фиг. 5a представлена схема конструкции передаточного узла 1000 согласно варианту осуществления 1. На фиг. 5b и 5c представлены схемы конструкции первого передаточного диска 1100. На фиг. 5d и 5e представлены схемы конструкции второго передаточного диска 1200. На фиг. 5f и 5g представлены схемы конструкции третьего передаточного диска 1300. В этом варианте осуществления проекции каждого первого передаточного диска 1100, второго передаточного диска 1200 и третьего передаточного диска 1300 на эталонной плоскости являются кольцевыми, то есть каждый из первого передаточного диска 1100, второго передаточного диска 1200 и третьего передаточного диска 1300 имеет кольцевой замкнутый контур. Кроме того, проекция каждой из первой направляющей поверхности 1010 и второй направляющей поверхности 1040 на эталонной плоскости является кольцевой. В альтернативных вариантах осуществления первый передаточный диск 1100, второй передаточный диск 1200 и третий передаточный диск 1300 могут принимать другие формы, такие как пятиэлементная структура. В этих случаях для каждого первого передаточного диска 1100, второго передаточного диска 1200 и третьего передаточного диска 1300 радиус его проекции на эталонной плоскости определяется как наибольшее расстояние от центра до края, а его диаметр определяется как двойной радиус. Кроме того, независимо от конкретных форм этих дисков пространство, занятое вращением каждого диска все же принимает форму вращающегося тела, такого как цилиндр, кольцевой усеченный конус или конус. Следовательно, проекцию каждого первого передаточного диска 1100, второго передаточного диска 1200 и третьего передаточного диска 1300 на эталонной плоскости можно рассматривать как круг по его центру и радиус.
Как показано на фиг. 5b, в этом варианте осуществления первый конец первого передаточного диска 1100 может быть соединен с приводным механизмом. Конкретно, на первом конце может иметься первая соединительная бабка 1110, а в первой соединительной бабке 1110 может иметься первое соединительное отверстие 1120, выполненное с возможностью приема в нем выходного вала приводного механизма. Кроме того, в боковой стенке первой соединительной бабки 1110 предоставлено фиксирующее отверстие 1130, сообщающееся с первым соединительным отверстием 1120. Фиксирующее отверстие 1130 выполнено с возможностью вызывать синхронизированное вращение выходного вала приводного механизма с первым передаточным диском 1100. Предпочтительно, ось фиксирующего отверстия 1130 перпендикулярна оси первого соединительного отверстия 1120. Приводной механизм, например выходной вал двигателя, может быть вставлен в первое соединительное отверстие 1120, а для фиксации выходного вала двигателя в фиксирующем отверстии 1130 используют фиксирующее крепежное приспособление.
Как показано на фиг. 5c, торцевая сторона второго конца первого передаточного диска 1100 имеет первую направляющую поверхность 1010, образованную на ней. Первая направляющая поверхность 1010 имеет две вершины и две впадины, которые расположены вдоль окружности второго конца. Кроме того, две вершины симметричны друг другу относительно центра первой направляющей поверхности 1010, а две впадины также симметричны друг другу относительно центра первой направляющей поверхности 1010. в каждой впадине предоставлен один первый зацепляющий компонент 1020. Предпочтительно, в центре торцевой стороны второго конца предоставлен первый установочный штифт 1140, проходящий в осевом направлении. Первый установочный штифт 1140 выполнен с возможностью облегчения размещения, когда первый передаточный диск 1100 сцеплен со вторым передаточным диском 1200. Кроме того, кольцевая проекция первой направляющей поверхности 1010 на эталонной плоскости имеет диаметр d. то есть осевая проекция первой направляющей поверхности 1010 имеет диаметр d. Кроме того, первая направляющая поверхность 1010 имеет осевое расстояние от вершины до впадины h, что удовлетворяет условию h≥1/10d.
Кроме того, на торцевой стороне третьего конца образована первая сопряженная поверхность 1001, а на первой сопряженной поверхности 1001 предоставлены вторые зацепляющие компоненты 1020. Этот вариант осуществления не ограничен какой-либо конкретной формой первой сопряженной поверхности 1001 при условии, что она не препятствует движению вторых зацепляющих компонентов 1030 вдоль первой направляющей поверхности 1010 и зацеплению вторых зацепляющих компонентов 1030 с первыми зацепляющими компонентами 1020. Другими словами, первая сопряженная поверхность 1001 может либо контактировать с первой направляющей поверхностью 1010, либо нет. Предпочтительно, когда вторые зацепляющие компоненты 1030 находятся в зацеплении с первыми зацепляющими компонентами 1020, первая направляющая поверхность 1010 по меньшей мере частично подходит к первой сопряженной поверхности 1001.
Как показано на фиг. 5d, два вторых зацепляющих компонента 1030 расположены на третьем конце второго передаточного диска 1200. Предпочтительно, два вторых зацепляющих компонента 1030 расположены симметрично относительно центра торцевой стороны третьего конца. В этом варианте осуществления первая сопряженная поверхность 1001 имеет две вершины и две впадины, которые расположены вдоль окружности третьего конца. На каждой из двух вершин предоставлен один второй зацепляющий компонент 1030. Кроме того, во впадине может иметься первая вмещающая канавка 1002 для приема вершины первой направляющей поверхности 1010. Первая сопряженная поверхность 1001 может по существу упираться в первую направляющую поверхность 1010. За счет предоставления первой сопряженной поверхности 1001, когда вторые зацепляющие компоненты 1030 находятся в зацеплении с первыми зацепляющими компонентами 1020 для передачи, можно избежать чрезмерной длины осевого вылета вторых зацепляющих компонентов 1030, таким образом улучшая состояние напряжения вторых зацепляющих компонентов 1030 и увеличивая срок службы вторых зацепляющих компонентов 1030. Кроме того, первая сопряженная поверхность 1001 также может повысить конструктивную прочность второго передаточного диска 1200.
Снова со ссылкой на фиг. 5d второй зацепляющий компонент 1030 может содержать первый участок 1031 передачи движущей силы и первый направляющий участок 1032, которые соединены вместе. Конец первого участка 1031 передачи движущей силы, удаленный от первого направляющего участка 1032, соединен с первой сопряженной поверхностью 1001, а первый участок 1031 передачи движущей силы выполнен с возможностью передачи крутящего момента, когда он входит в зацепление с первыми зацепляющими компонентами 1020. Этот вариант осуществления не ограничен какой-либо конкретной формой первого участка 1031 передачи движущей силы при условии, что он может образовать контакт по окружности (например точечный контакт, линейный контакт или поверхностный контакт), когда он входит в зацепление с первым зацепляющим компонентом 1020. Предпочтительно, проекция первого участка 1031 передачи движущей силы на эталонной плоскости имеет форму, соответствующую форме проекции первого зацепляющего компонента на эталонной плоскости. Например, когда проекция первого зацепляющего компонента 1020 на эталонной плоскости имеет форму серпообразного эллипсоида, проекция первого участка 1031 передачи движущей силы на эталонной плоскости также имеет форму серпообразного эллипсоида, то есть первый зацепляющий компонент 1020 представляет собой углубление с формой серпообразного эллипсоида. В данном случае углубление с формой серпообразного эллипсоида относится к углублению, образованному двумя боковыми плоскостями и одной переходной поверхностью и имеющему открытый конец, где две боковые плоскости параллельны друг другу, а открытый конец углубления расположен на стороне, удаленной от оси второго передаточного диска 1200. Первый участок 1031 передачи движущей силы также образован двумя боковыми плоскостями и одной переходной поверхностью. Альтернативно, проекция первого зацепляющего компонента 1020 на эталонной плоскости имеет форму веера. В этом случае веерообразное углубление также имеет открытый конец, удаленный от оси второго передаточного диска 1200. Проекция первого участка 1031 передачи движущей силы на эталонной плоскости также имеет форму веера, который, однако имеет угол немного меньше угла веера, образованного первым зацепляющим компонентом 1020.
Первый направляющий участок 1032 выполнен с возможностью контакта с первой направляющей поверхностью 1010 и с возможностью скольжения вдоль первой направляющей поверхности 1010. Конкретно, первый направляющий участок 1032 может иметь клинообразную конструкцию и может содержать две клиновидные поверхности. Две клиновидные поверхности стыкуются на конце первого направляющего участка 1032, удаленного от первого участка 1031 передачи движущей силы с образованием линии пересечения, которая контактирует с первой направляющей поверхностью 1010. В альтернативных конструкциях две клиновидные поверхности соединены изогнутой переходной поверхностью на конце, удаленном от первого участка 1031 передачи движущей силы. В связи с этим между первым направляющим участком 1032 и первой направляющей поверхностью 1010 может быть образован линейный или поверхностный контакт. Альтернативно, первый направляющий участок 1032 имеет вершину на конце, удаленном от первого участка 1031 передачи движущей силы, а между вершиной и первой направляющей поверхностью 1010 образован точечный контакт. Другими словами, этот вариант осуществления не ограничен какой-либо конкретной формой первого направляющего участка 1032 при условии, что, когда второй передаточный диск 1200 подвергается воздействию осевой внешней силы, а два первых направляющих участка 1032 входят в контакт с первой направляющей поверхностью 1010, два первых направляющих участка 1032 подвергаются воздействию неуравновешенных сил и могут таким образом двигаться вдоль первой направляющей поверхности 1010 попадать в зацепление с первыми зацепляющими компонентами 1020. В данном случае осевая внешняя сила относится не только к внешней силе, параллельной осевому направлению и направленной в сторону второго передаточного диска, но также к внешней силе, направленной в сторону второго передаточного диска и имеющей компонент, параллельный осевому направлению. Кроме того, поверхность клинообразной конструкции может представлять собой непрерывную изогнутую поверхность.
Кроме того, первое установочное отверстие 1210 предоставлено в центре третьего конца второго передаточного диска 1200. Первое установочное отверстие 1210 выполнено так, чтобы соответствовать первому установочному штифту 1140 первого передаточного диска 1100 для облегчения концентрического расположения первого передаточного диска 1100 и второго передаточного диска 1200. Четвертый конец второго передаточного диска 1200 и пятый конец третьего передаточного диска 1300 могут быть сконструированы также, поэтому их подробное описание пропущено.
Как показано на фиг. 5e, торцевая сторона четвертого конца второго передаточного диска 1200 образует вторую направляющую поверхность 1040, и две вершины и две впадины расположены на второй направляющей поверхности 1040 вдоль окружности четвертого конца. Кроме того, во впадинах второй направляющей поверхности 1040 предусмотрены третьи зацепляющие компоненты 1050. в соответствующих впадинах предусмотрены два зацепляющих компонента 1050. Кроме того, проекция второй направляющей поверхности 1040 на эталонной плоскости представляет собой круг, имеющий диаметр d', и вторая направляющая поверхность 1040 имеет осевое расстояние от вершины до впадины h', что удовлетворяет условию h'≥1/10d'.
Со ссылкой на фиг. 5f торцевая сторона пятого конца третьего передаточного диска 1300 снабжена двумя четвертыми зацепляющими компонентами 1060. Предпочтительно, торцевая сторона пятого конца образует вторую сопряженную поверхность 1003, а на второй сопряженной поверхности 1003 вдоль окружности пятого конца расположены две вершины и две впадины. Кроме того, один четвертый зацепляющий компонент 1060 предоставлен на каждой вершине, а в каждой впадине может иметься вторая вмещающая канавка 1004 для размещения вершины второй направляющей поверхности 1040. Предпочтительно, когда четвертые зацепляющие компоненты 1060 находятся в зацеплении с третьими зацепляющими компонентами 1050, вторая направляющая поверхность 1040 по меньшей мере частично совпадает со второй сопряженной поверхностью 1003. За счет предоставления второй сопряженной поверхности 1003 и конфигурирования четвертых зацепляющих компонентов 1060 на вершинах второй сопряженной поверхности 1003 можно избежать чрезмерной длины осевого вылета четвертых зацепляющих компонентов 1060, таким образом улучшая состояние напряжения четвертых зацепляющих компонентов 1060 и увеличивая срок службы вторых зацепляющих компонентов 1030, когда четвертые зацепляющие компоненты 1060 попадают в зацепление с третьими зацепляющими компонентами 1050 для передачи. Кроме того, третья сопряженная поверхность 1001 также может повысить конструктивную прочность третьего передаточного диска 1300.
Снова со ссылкой на фиг. 5f четвертые зацепляющие компоненты 1060 могут иметь аналогичную конструкцию, что и вторые зацепляющие компоненты 1030. Четвертый зацепляющий компонент 1060 может содержать второй участок 1061 передачи движущей силы и второй направляющий участок 1062, которые соединены вместе. Конец второго участка 1061 передачи движущей силы, удаленный от второго направляющего участка 1062, соединен со второй сопряженной поверхностью, а второй участок 1061 передачи движущей силы выполнен с возможностью передачи крутящего момента, когда он входит в зацепление с третьими зацепляющими компонентами 1050. Этот вариант осуществления не ограничен какой-либо конкретной формой второго участка 1061 передачи движущей силы при условии, что он может образовать контакт по окружности (например точечный контакт, линейный контакт или поверхностный контакт) с третьим зацепляющим компонентом 1050, когда он входит в зацепление с третьим зацепляющим компонентом 1050. Предпочтительно, проекция второго участка 1061 передачи движущей силы на эталонной плоскости имеет форму, соответствующую форме проекции первого зацепляющего компонента на эталонной плоскости. Например, когда проекция первого зацепляющего компонента 1020 на эталонной плоскости имеет форму серпообразного эллипсоида, поперечное сечение второго участка 1061 передачи движущей силы, перпендикулярное оси, может также иметь форму серпообразного эллипсоида. Альтернативно, когда проекция первого зацепляющего компонента 1020 на эталонной плоскости имеет форму веера, поперечное сечение второго участка 1061 передачи движущей силы, перпендикулярное оси, может также иметь форму веера.
Второй направляющий участок 1062 выполнен с возможностью контакта со второй направляющей поверхностью 1040 и с возможностью скольжения вдоль второй направляющей поверхности 1040. Конкретно, второй направляющий участок 1062 может иметь клинообразную конструкция и может содержать две клиновидные поверхности. Две клиновидные поверхности стыкуются на конце второго направляющего участка 1062, удаленном от второго участка 1061 передачи движущей силы с образованием линии пересечения, которая контактирует со второй направляющей поверхностью 1040. В альтернативных конструкциях две клиновидные поверхности соединены изогнутой переходной поверхностью на конце, удаленном от второго участка 1061 передачи движущей силы. В связи с этим линейный или поверхностный контакт может быть образован между вторым направляющим участком 1062 и второй направляющей поверхностью 1040. Альтернативно, второй направляющий участок 1062 имеет вершину на конце, удаленном от второго участка 1061 передачи движущей силы, а между вершиной и второй направляющей поверхностью 1060 образован точечный контакт. Другими словами, этот вариант осуществления не ограничен какой-либо конкретной формой второго направляющего участка 1062 при условии, что, когда третий передаточный диск 1300 подвергается воздействию осевой внешней силы, а два вторых направляющих участка 1062 входят в контакт со второй направляющей поверхностью 1040, два вторых направляющих участка 1062 подвергаются воздействию неуравновешенных сил и могут таким образом двигаться вдоль второй направляющей поверхности 1040, попадая в зацепление с третьими зацепляющими компонентами 1050. Аналогичным образом, поверхность клинообразной конструкции может представлять собой непрерывную изогнутую поверхность.
В этом варианте осуществления первые зацепляющие компоненты 1020 идентичны третьим зацепляющим компонентам 1050. Соответственно, вторые зацепляющие компоненты 1030 могут быть идентичны четвертым зацепляющим компонентам 1060. В альтернативных вариантах осуществления первые зацепляющие компоненты 1020 могут отличаться от третьих зацепляющих компонентов 1050. Соответственно, вторые зацепляющие компоненты 1030 могут также отличаться от четвертых зацепляющих компонентов 1060.
Как показано на фиг. 5g, шестой конец третьего передаточного диска 1300 может быть соединен с передаточным модулем узла инструментального короба для передачи крутящего момента. Конкретно, на шестом конце может иметься вторая соединительная бабка 1310, и вторая соединительная бабка 1310 может быть снабжена вторым соединительным отверстием 1320. Этот вариант осуществления не ограничен какой-либо конкретной конструкцией передаточного модуля. Например, передаточный модуль может содержать вращающийся элемент, гибкий элемент и группу направляющих шкивов. Гибкий элемент выполнен с возможностью соединения вращающегося элемента с сочленением инструментального наконечника 410. Группа направляющих шкивов выполнена с возможностью изменения направления продолжения гибкого элемента. Вращающийся элемент выполнен с возможностью приведения в действие сочленения инструментального наконечника 410 для перемещения посредством гибкого элемента. Второе соединительное отверстие 1320 выполнено с возможностью фиксированного соединения с вращающимся элементом или с возможностью отсоединения для передачи крутящего момента в передаточный модуль.
Иллюстративный способ использования передаточного узла 1000 согласно этому варианту осуществления описан следующим образом: второй конец первого передаточного диска 1100 размещают торец к торцу с третьим концом второго передаточного диска 1200, а четвертый конец второго передаточного диска 1200 размещают торец к торцу с пятым концом третьего передаточного диска 1300. После этого второй зацепляющий компонент 1030 скользит вдоль первой направляющей поверхности 1010 до его попадания в первый зацепляющий компонент 1020 и зацепления с первым зацепляющим компонентом 1020, а четвертый зацепляющий компонент 1060 скользит вдоль второй направляющей поверхности 1040 до его попадания в третий зацепляющий компонент 1050 и зацепления с третьим зацепляющим компонентом 1050. Когда первый конец первого передаточного диска 1100 соединен с приводным механизмом, а приводной механизм приводит во вращение первый передаточный диск 1100, вторые зацепляющие компоненты 1030 будут взаимодействовать с первыми зацепляющими компонентами 1020 для передачи крутящего момента, чтобы вращать второй передаточный диск 1200 с первым передаточным диском 1100. Кроме того, четвертые зацепляющие компоненты 1060 будут взаимодействовать с третьими зацепляющими компонентами 1050 для передачи крутящего момента, чтобы вращать третий передаточный диск 1300.
В дополнительной модификации, как показано на фиг. 5c, первые направляющие поверхности 1010 содержат первые направляющие вспомогательные поверхности 1011 и вторые направляющие вспомогательные поверхности 1011'. Первые направляющие вспомогательные поверхности 1011 и вторые направляющие вспомогательные поверхности 1011' стыкуются на вершинах и образуют две линии пересечения. Две линии пересечения проецируют на эталонную плоскость для получения линий проекции, маркированных как первая линия проекции и третья линия проекции. Как показано на фиг. 5d, второй зацепляющий компонент 1030 содержит первые направляющие участки 1032, причем каждый первый направляющий участок 1032 содержит две клиновидные поверхности. Две клиновидные поверхности стыкуются с образованием линии пересечения. линии пересечения проецируют на эталонную плоскость для получения линий проекции, маркированных как вторая линия проекции и четвертая линия проекции. В зависимости от форм направляющей поверхности и клиновидных поверхностей линии проекции с первой по четвертую могут быть прямыми или иметь S-, C-, L- или иную форму, которая в этом варианте осуществления особо не ограничена. Первая, вторая, третья и четвертая линии проекции выполнены таким образом, что, когда вторые зацепляющие компоненты 1030 входят в контакт с первой направляющей поверхностью 1010, первая линия проекции полностью или частично совпадает со второй линией проекции, а третья линия проекции полностью или частично совпадает с четвертой линией проекции. Альтернативно, первая линия проекции лежит на одной прямой с третьей линией проекции, а вторая линия проекции лежит на одной прямой с четвертой линией проекции. Предпочтительно, первая и третья линии проекции находятся на одной прямой, и пересекаются с осью передаточного узла 1000. Конфигурации линий проекции с первой по четвертую обеспечивают достижение того, что каждый из приведенных выше первых направляющих участков 1032 подвергается воздействию неуравновешенной силы, когда он входит в контакт с первой направляющей поверхностью 1010, которая может вызывать перемещение вторых зацепляющих компонентов 1030 вдоль первой направляющей поверхности и входить в зацепление с первыми зацепляющими компонентами, таким образом обеспечивая передачу крутящего момента между первым передаточным диском и вторым передаточным диском. Аналогичным образом, вторая направляющая поверхность 1040 имеет пятую и седьмую линии проекции, а вторые направляющие участки 1062 имеют шестую и восьмую проекции. линии проекции с пятой по восьмую выполнены аналогично описанным выше линиям проекции, так что каждый из вторых направляющих участков 1062 подвергается воздействию неуравновешенной силы, когда он находится в контакте со второй направляющей поверхностью 1040.
Кроме того, когда направляющие вспомогательные поверхности соединены переходной поверхностью, между двумя направляющими вспомогательными поверхностями не существует четкой линии пересечения. Аналогичным образом, когда две клиновидные поверхности направляющего участка соединены переходной поверхностью, между двумя клиновидными поверхностями не существует четкой линии пересечения. В этих случаях линия пересечения образована следующим образом. Переходная поверхность разрезана группой плоских или изогнутых воображаемых режущих поверхностей, и между переходной поверхностью и группой плоских или изогнутых воображаемых режущих поверхностей образована группа линий пересечения разреза. Соединительная линия, образованная за счет соединения каждой из характерных точек группы линий пересечения разреза, образована в виде линии пересечения. Например, характерная точка является самой высокой точкой линии пересечения разреза в направлении по оси передаточного диска. Как показано на фиг. 6a (в качестве примера для иллюстрации взят второй передаточный диск 1200 на фиг. 6a), количество плоских или изогнутых воображаемых режущих поверхностей составляет по меньшей мере две. На фиг. 6a представлено три изогнутых воображаемых режущих поверхностей P1, P2 и P3, а самая высокая точка относится к точке на линии пересечения, которая находится дальше всего от центра второго передаточного диска 1200 вдоль осевого направления второго передаточного диска 1200.
В качестве другого примера плоские воображаемые режущие поверхности могут быть расположены параллельно оси передаточного диска, а группой изогнутых воображаемых режущих поверхностей могут быть соосные цилиндрические поверхности. Как показано на фиг. 6a, первый направляющий участок 1032 второго зацепляющего компонента 1030 содержит две клиновидные поверхности. Две клиновидные поверхности соединены переходной поверхностью. Для получения второй и четвертой линий проекции плоские воображаемые режущие поверхности, параллельные оси передаточного узла 1000 можно использовать для разрезания первого направляющего участка 1032. Как показано на фиг. 6b, плоские воображаемые режущие поверхности образуют линии пересечения разреза с первым направляющим участком 1032, и берут самые высокие точки (то есть точку A, показанную на фиг. 6) линий пересечения разреза. Когда количество режущих поверхностей по меньшей мере две, можно взять по меньшей мере две самые высокие точки. все эти самые высокие точки проецируют на эталонную плоскость для получения точек проекции, и точки проекции соединяют для получения второй или четвертой линия проекции. В общем, чем больше используют режущих поверхностей, тем выше будет точность полученной второй или четвертой линия проекции. если второй направляющий участок 1062 четвертых зацепляющих компонентов 1060 выполнен таким же образом, то соответствующие линии проекции получают с использованием того же способа. Аналогичным образом, вторая направляющая поверхность 1040 выполнена идентично первой направляющей поверхности 1010, а четвертые зацепляющие компоненты 100 выполнены идентично вторым зацепляющим компонентам 1030.
Кроме того, в этом варианте осуществления первая направляющая поверхность 1010 состоит из ряда изогнутых поверхностей, ряда плоских поверхностей или одной непрерывной изогнутой поверхности. Аналогично, вторая направляющая поверхность 1040 состоит из ряда изогнутых поверхностей, ряда плоских поверхностей или одной непрерывной изогнутой поверхности. Первая сопряженная поверхность 1001 состоит из ряда изогнутых поверхностей, ряда плоских поверхностей или одной непрерывной изогнутой поверхности. Вторая сопряженная поверхность 1003 выполнена таким же образом. Фактически, для каждого первого передаточного диска 1100, второго передаточного диска 1200 и третьего передаточного диска 1300 предпочтительно, чтобы все пересекающиеся поверхности плавно переходили от одной к другой таким образом, чтобы избежать какого-либо острого стыка, который может вызывать повреждение у пользователя.
Далее сделана ссылка на фиг. 7a и 7b, на которых схематично представлена конструкция варианта осуществления 1. Как показано на фиг. 7a и 7b, на втором конце первого передаточного диска 1100 образована первая направляющая поверхность 1010. Первая направляющая поверхность 1010 имеет одну вершину и одну впадину, которые расположены в направлении по окружности второго конца. Соответственно, предусмотрены один первый зацепляющий компонент 1020 и один второй зацепляющий компонент 1030. Вторая направляющая поверхность 1040 образована на четвертом конце второго передаточного диска 1200. Вторая направляющая поверхность 1040 имеет одну вершину и одну впадину, которые расположены в направлении по окружности четвертого конца. Соответственно, предусмотрены один третий зацепляющий компонент 1050 и один четвертый зацепляющий компонент 1060. Кроме того, в этом варианте осуществления предпочтительно первый установочный штифт 1140 предоставлен в центре второй торцевой стороны первого передаточного диска 1010, а в центре третьей торцевой стороны второго передаточного диска 1200 предоставлено первое установочное отверстие 1210, совпадающее с первым установочным штифтом 1140. Второй установочный штифт 1220 предоставлен в центре четвертой торцевой стороны второго передаточного диска 1200, а в центре пятой торцевой стороны третьего передаточного диска 1300 предоставлено второе установочное отверстие 1330, совпадающее со вторым установочным штифтом 1220. За счет совпадения первого установочного штифта 1140 и первого установочного отверстия 1210 и совпадения второго установочного штифта 1220 и второго установочного отверстия 1330 можно обеспечить безопасность процесса передачи, когда выполнены только один первый зацепляющий компонент 1020, один второй зацепляющий компонент 1030, один третий зацепляющий компонент 1050 и один четвертый зацепляющий компонент 1060.
Фактически, количества вершин и впадин на первой направляющей поверхности 1010 определяют в зависимости от количества первого зацепляющего компонента (компонентов) 1020, в то время как количество первого зацепляющего компонента (компонентов) определяют в зависимости от требуемого устойчивого к отказам угла. В общем, больший устойчивый к отказам угол требует меньшего количества первых зацепляющих компонентов.
Например, когда устойчивый к отказам угол составляет 180°, нужно по меньшей мере два первых зацепляющих компонента 1020. Термин «устойчивый к отказам угол» будет объяснен подробно ниже. Кроме того, толщина (размер в направлении передачи крутящего момента) первого зацепляющего компонента 1020 относится к величине крутящего момента. Больший крутящий момент требует большей толщины первого зацепляющего компонента 1020. Принцип конфигурирования первой направляющей поверхности 1010 также применим ко второй направляющей поверхности 1040. Кроме того, для случая, когда имеется два или более первых зацепляющих компонента 1020, два или более вторых зацепляющих компонента 1030, два или более третьих зацепляющих компонента 1050 и два или более четвертых зацепляющих компонента 1060, в зависимости от обстоятельств может иметься первый установочный штифт 1140 и второй установочный штифт 1220.
Далее сделана ссылка на фиг. 7c и 7d, на которых схематично представлена конструкция другого варианта осуществления 1. Как показано на фиг. 7c и 7d, первая направляющая поверхность 1010 образована на втором конце первого передаточного диска 1100, а на первой направляющей поверхности 1010 предусмотрены три вершины и три впадины. Кроме того, первая направляющая поверхность 1010 является кольцеобразной и частично покрывает часть второго конца первого передаточного диска 1100. предусмотрено три первых зацепляющих компонента 1020 и три вторых зацепляющих компонента 1030.
Далее сделана ссылка на фиг. 7e и 7f, на которых схематично представлена конструкция дополнительного варианта осуществления 1. Как показано на фиг. 7e и 7f, первая сопряженная поверхность 1001 предоставлена на втором конце первого передаточного диска 1100. Первая направляющая поверхность 1010 образована на третьем конце второго передаточного диска 1200, а вторая направляющая поверхность 1040 образована на четвертом конце второго передаточного диска 1200, при этом вторая сопряженная поверхность 1003 предоставлена на пятом конце третьего передаточного диска 1300. Кроме того, вторая сопряженная поверхность 1003 представляет собой кольцевую поверхность и частично покрывает пятый конец третьего передаточного диска 1300. Вторые сопряженные поверхности 1003 имеют три вершины и три впадины. Соответственно, предусмотрено три четвертых зацепляющих компонента 1060 и три третьих зацепляющих компонента 1050. На первой сопряженной поверхности 1001 отсутствует первая вмещающая канавка. Этот вариант осуществления не ограничен какой-либо конкретной формой впадины первой сопряженной поверхности 1001 при условии, что впадина первой сопряженной поверхности 1001 не препятствует зацеплению первого передаточного диска 1100 со вторым передаточным диском 1200. то есть когда вершины первой направляющей поверхности 1010 совпадают со впадинами первой сопряженной поверхности 1001, первый передаточный диск 1100 входит в зацепление со вторым передаточным диском 1200. Другими словами, форма впадины на первой сопряженной поверхности 1001 выполнена таким образом, что, когда первый передаточный диск 1100 находится в зацеплении со вторым передаточным диском 1200, нет контакта между впадинами первой сопряженной поверхности 1001 и вершинами первой направляющей поверхности 1010 (например, первая сопряженная поверхность 1001 совсем не находится в контакте с первой направляющей поверхностью 1010; или впадина первой сопряженной поверхности 1001 не находится в контакте с соответствующей вершиной первой направляющей поверхности 1010, при том что между двумя боковыми участками впадины первой сопряженной поверхности 1001 и двумя боковыми участками соответствующей вершины первой направляющей поверхности 1010 образован линейный контакт или поверхностный контакт). Альтернативно, нужно, чтобы форма впадин на первой сопряженной поверхности 1001 была выполнена таким образом, что, когда впадины первой сопряженной поверхности 1001 находятся в контакте с вершинами первой направляющей поверхности 1010, первый передаточный диск 1100 также находится в зацеплении со вторым передаточным диском 1200. Например, форма впадины первой сопряженной поверхности 1001 комплементарна форме вершины первой направляющей поверхности 1010. В этом случае, когда первый передаточный диск 1100 зацепляет второй передаточный диск 1200, вершины первой направляющей поверхности 1010 совпадают с впадинами первой сопряженной поверхности 1001.
Снова со ссылкой на фиг. 7e первые зацепляющие компоненты 1020 и третьи зацепляющие компоненты 1050 альтернативно расположены на втором передаточном диске 1200. Это может привести к использованию увеличенного осевого размера второго передаточного диска 1200.
Далее сделана ссылка на фиг. 7g и 7h, на которых схематично представлена конструкция дополнительного варианта осуществления 1. Как показано на фиг. 7 g и 7h, первая направляющая поверхность 1010 образована на втором конце первого передаточного диска 1100, первая сопряженная поверхность 1001 образована на третьем конце второго передаточного диска 1200, вторая сопряженная поверхность 1003 образована на четвертом конце второго передаточного диска 1200, вторая направляющая поверхность 1040 образована на пятом конце третьего передаточного диска 1300. В этом варианте осуществления каждая из первой сопряженной поверхности 1001 и второй сопряженной поверхности 1003 снабжена двумя вершинами и двумя впадинами, и вершины первой сопряженной поверхности 1001 и вершины второй сопряженной поверхности 1003 расположены в одинаковых круговых положениях. Конечно, вершины первой сопряженной поверхности 1001 и вершины второй сопряженной поверхности 1003 могут быть расположены в разных круговых положениях, например в альтернативном расположении.
В альтернативных вариантах осуществления первая сопряженная поверхность может быть дополнительно образована на втором конце первого передаточного диска, первая направляющая поверхность образована на третьем конце второго передаточного диска, вторая направляющая поверхность образована на четвертом конце второго передаточного диска. Вторая сопряженная поверхность образована на пятом конце третьего передаточного диска (не показано).
Далее сделана ссылка на фиг. 8a-8g. На фиг. 8a представлена схема конструкции передаточного узла 1000 согласно варианту осуществления 2. На фиг. 8b и 8c представлены схемы конструкции первого передаточного диска 1100. На фиг. 8d и 8e представлены схемы конструкции второго передаточного диска 1200. На фиг. 8f и 8g представлены схемы конструкции третьего передаточного диска 1300.
Как показано на фиг. 8b, первый конец первого передаточного диска 1100 может быть выполнен с возможностью связывания приводного механизма. Следовательно, их конструкции могут быть такими же. как в варианте осуществления 1, и их подробное описание пропущено. На фиг. 8c схематично показана конструкция второго конца первого передаточного диска 1100. Как показано на фиг. 8c, первая направляющая поверхность 1010 образована на втором конце первого передаточного диска 1100, и первая направляющая поверхность 1010 спроецирована на эталонной плоскости для получения проекционного круга. Такой проекционный круг имеет диаметр меньше диаметра проекционного круга первого передаточного диска 1100 на эталонной плоскости. Первые зацепляющие компоненты 1020 предусмотрены на первой направляющей поверхности 1010.
Как показано на фиг. 8d, вторые зацепляющие компоненты 1030 предусмотрены на третьем конце второго передаточного диска 1200, а на торцевой стороне третьего конца предусмотрена первая защитная стенка 1005, окружающая вторые зацепляющие компоненты 1030. Первая защитная стенка 1005 является кольцеобразной и может быть надета на первую направляющую поверхность 1010. Кроме того, вторые зацепляющие компоненты 1030 расположены в первой защитной стенке 1005 и жестко соединены с ней. Внутренний диаметр первой защитной стенки 1005 может быть больше или равен диаметру проекционного круга первой направляющей поверхности 1010 на эталонной плоскости и меньше диаметра проекционного круга первого передаточного диска 1100 на эталонной плоскости. Предпочтительно, толщина первой защитной стенки 1005 может быть равна значению разницы между диаметрами проекционных кругов первой направляющей поверхности 1010 и первого передаточного диска 1100. В связи с этим, когда первые зацепляющие компоненты 1020 входят в зацепление со вторыми зацепляющими компонентами 1030, конец, где находится первая направляющая поверхность 1010, вставлен в первую защитную стенку 1005, притом что конец первой защитной стенки 1005, удаленный от второго передаточного диска 1200, упирается в первый передаточный диск 1100.
Как показано на фиг. 8e, вторая направляющая поверхность 1040 образована на четвертом конце второго передаточного диска 1200. Вторая направляющая поверхность 1040 спроецирована на эталонной плоскости для получения проекционного круга. Этот проекционный круг имеет диаметр меньше диаметра проекционного круга второго передаточного диска 1200 на эталонной плоскости. Третьи зацепляющие компоненты 1050 предусмотрены на второй направляющей поверхности 1040.
Как показано на фиг. 8f, четвертые зацепляющие компоненты 1060 предоставлены на пятом конце третьего передаточного диска 1300. Кроме того, на пятом конце представлена вторая защитная стенка 1006, окружающая четвертые зацепляющие компоненты 1060. Вторая защитная стенка 1006 является кольцеобразной и может быть надета на вторую направляющую поверхность 1040. Кроме того, четвертый зацепляющий компонент 1060 расположен на второй защитной стенке 1006 и неподвижно соединен с ней. Внутренний диаметр второй защитной стенки 1006 больше или равен диаметру проекционного круга второй направляющей поверхности 1040 и меньше диаметра проекционного круга второго передаточного диска 1200 на эталонной плоскости. Предпочтительно, толщина второй защитной стенки 1006 может быть равна значению разницы между диаметрами проекционных кругов второй направляющей поверхности 1040 и второго передаточного диска 1200. В связи с этим, когда третьи зацепляющие компоненты 1050 входят в зацепление с четвертыми зацепляющими компонентами 1060, конец, где находится вторая направляющая поверхность 1040, вставлен во вторую защитную стенку 1006, при том что конец второй защитной стенки 1006, удаленный от третьего передаточного диска 1300, упирается во второй передаточный диск 1200.
Поскольку вторые зацепляющие компоненты 1030 взаимодействуют с первой защитной стенкой 1005, когда вторые зацепляющие компоненты 1030 входят в зацепление с соответствующими первыми зацепляющими компонентами 1020 для передачи, первая защитная стенка 1005 улучшает состояние напряжения вторых зацепляющих компонентов 1030, уменьшает воздействие пыли или других чужеродных материалов и увеличивает срок службы вторых зацепляющих компонентов 1030. Кроме того, это расположение дополнительно позволяет уменьшить вес второго передаточного диска 1200 и упростить конструкцию второго передаточного диска 1200. Аналогичным образом, вторая защитная стенка 1006 может помочь увеличить срок службы четвертых зацепляющих компонентов 1060 и уменьшить вес третьего передаточного диска 1300.
На фиг. 9a и 9b представлены схемы конструкции передаточного узла 1000 согласно варианту осуществления 3. В случае применения, требующего многоуровневой защиты, может потребоваться несколько стерильных узлов 200. Для системы хирургических инструментов, содержащей несколько стерильных узлов 200, передаточный узел 1000 может соответственно содержать несколько вторых передаточных дисков 1200. В варианте осуществления, показанном на фиг. 9a и 9b, предусмотрено два вторых передаточных дисков 1200. Кроме того, два вторых передаточных дисков 1200 являются идентичными, и каждый из них имеет третий и четвертый концы с разной конструкцией. Например, в этом варианте осуществления для каждого второго передаточного диска 1200 первая сопряженная поверхность 1001 образована на третьем конце, а на первой сопряженной поверхности 1001 предусмотрены вторые зацепляющие компоненты 1030. Кроме того, для каждого второго передаточного диска 1200 вторая направляющая поверхность 1040 образована на четвертом конце, а на второй направляющей поверхности 1040 предусмотрены третьи зацепляющие компоненты 1050. В связи с этим вторые зацепляющие компоненты 1030 одного второго передаточного диска 1200 могут зацеплять третьи зацепляющие компоненты 1050 другого второго передаточного диска 1200, таким образом обеспечивая связывание двух вторых передаточных дисков 1200. Соответственно, первая направляющая поверхность 1010 образована на втором конце первого передаточного диска 1100, а вторая сопряженная поверхность 1003 образована на пятом конце третьего передаточного диска 1300, причем четвертые зацепляющие компоненты 1060 представлены на третьей сопряженной поверхности 1003. Таким образом, передаточный узел 1000 можно собирать таким же образом, как в приведенных выше вариантах осуществления. Нужно понять, что также можно иметь первую направляющую поверхность 1001, образованную на торцевой стороне третьего конца вторых передаточных дисков 1200, и четвертый зацепляющий компонент 1060, представленный на торцевой стороне четвертого конца. В одном альтернативном варианте осуществления два вторых передаточных диска разные, но каждый из них имеет идентичную конструкцию на третьем и четвертом концах. Например, второй передаточный диск, ближайший к первому передаточному диску 1100, имеет третий и четвертый концы, каждый из которых снабжен сопряженной поверхностью, а второй передаточный диск, удаленный от первого передаточного диска 1100, имеет третий и четвертый концы, каждый с направляющей поверхностью.
На фиг. 10 представлена схема конструкции передаточного узла 1000 согласно варианту осуществления 4. Как показано на фиг. 10, в этом варианте осуществления второй зацепляющий компонент содержит первый направляющий участок 1032, но не первый участок передачи движущей силы. Конструкция четвертого зацепляющего компонента похожа на конструкцию второго зацепляющего компонента 1030, то есть четвертый зацепляющий компонент нет содержит второй участок передачи движущей силы. Конкретно, два первых зацепляющих компонента 1020 предусмотрены на торцевой стороне второго конца первого передаточного диска 1100, и два вторых зацепляющих компонента 1030 предусмотрены на торцевой стороне третьего конца второго передаточного диска 1200. Второй зацепляющий компонент содержит первый направляющий участок 1032, который прямо расположен на торцевой стороне второго конца первого направляющего участка 1032. Аналогично, два третьих зацепляющих компонента 1050 предусмотрены на торцевой стороне четвертого конца второго передаточного диска 1200, и два четвертых зацепляющих компонента предусмотрены на торцевой стороне пятого конца третьего передаточного диска 1300. Четвертый зацепляющий компонент содержит второй направляющий участок 1062, прямо соединенный с торцевой стороной пятого конца. В этом случае первый 1020 и третий 1050 зацепляющие компоненты соответствуют первому 1032 и второму 1062 направляющим участкам и по форме и по размеру. Это обеспечивает достаточный поверхностный контакт между зацепляющими компонентами и направляющими участками для увеличения взаимного трения, обеспечивающего как передачу крутящего момента, так и придавая направляющие свойства направляющим участкам.
Очевидно, для системы хирургических инструментов, не содержащей никакого стерильного узла, передаточный узел содержит первый передаточный диск и второй передаточный диск, расположенные последовательно. Первый передаточный диск похож на первый передаточный диск 1100 приведенных выше вариантов осуществления. Кроме того, в приведенных выше вариантах осуществления торцевая сторона третьего конца второго передаточного диска похожа на торцевую сторону третьего конца второго передаточного диска 1200, а торцевая сторона четвертого конца похожа на торцевую сторону шестого конца третьего передаточного диска. Следовательно, пропущено подробное их описание.
На основании описанного выше передаточного узла 1000 второй целью настоящего раскрытия является предоставление системы хирургических инструментов для использования в хирургическом роботе. Как показано на фиг. 2a-2c, в сочетании с фиг. 5a, система хирургических инструментов содержит коробку движущих сил, стерильную пластину 4000, хирургический инструмент 300 и передаточный узел 1000, как описано выше. Коробка движущих сил содержит приводной механизм 2000 и первый корпус 3000 коробки. Приводной механизм 2000 расположен в первом корпусе 3000 коробки, и в первом корпусе 3000 коробки предоставлено по меньшей мере одно выходное отверстие (не отмечено на фигурах). предоставлена по меньшей мере одна стерильная пластина 4000, снабженная по меньшей мере одним передаточным отверстием (не отмечено на фигурах). Хирургический инструмент 300 содержит инструментальный короб, вал 320 инструмента и инструментальный наконечник 310. Кроме того, инструментальный короб содержит второй корпус 5000 коробки и передаточный модуль (не отмечено на фигурах). Передаточный модуль расположен во втором корпусе 5000 коробки и соединен с валом 320 инструмента и/или инструментальным наконечником 310 таким образом, чтобы приводить в движение вал 320 инструмента и/или инструментальный наконечник 310. Кроме того, во втором корпусе 5000 коробки предоставлено по меньшей мере одно входное отверстие. Первый корпус 3000 коробки, стерильная пластина 4000 и второй корпус 5000 коробки расположены последовательно, и выходные отверстия расположены соосно с соответствующими передаточными отверстиями и входными отверстиями. Первый передаточный диск 1100 расположен в выходном отверстии, причем его первый конец соединен с приводным механизмом 2000. Второй передаточный диск 1200 расположен в передаточном отверстии, а третий передаточный диск 1300 расположен во входном отверстии, причем его шестой конец соединен с передаточным модулем. В общем, количество приводных механизмов 2000 и количество передаточных узлов 1000 определяется свободой перемещения хирургического инструмента 300. Коробка движущих сил и первый передаточный диск 1100 составляют приводной узел 100. Стерильная пластина 4000 и второй передаточный диск 1200 составляют стерильный узел 200. Инструментальный короб и третий передаточный диск 1300 составляют узел инструментального короба.
Когда первые зацепляющие компоненты 1020 находятся в зацеплении со вторыми зацепляющими компонентами 1030, а третьи зацепляющие компоненты 1050 находятся в зацеплении с четвертыми зацепляющими компонентами 1060, движущая сила, обеспечиваемая приводным механизмом, 2000 может передаваться передаточным узлом 1000 в передаточный модуль, который, в свою очередь, приводит в движение различные сочленения инструментального наконечника 310. Например, инструментальный наконечник 310 содержит концевой рабочий орган и сочленения, управляющие угловым поворотом и/или наклоном концевого рабочего органа. Концевой рабочий орган может содержать открывающееся-закрывающееся сочленение. Конкретные примеры концевого рабочего органа могут включать, но без ограничения, пинцет, ножницы, захваты, иглодержатели, режущие лезвия, сшиватели и так далее. Инструментальный наконечник 310 может дополнительно содержать змеевидное сочленение на проксимальном конце концевого рабочего органа, позволяющее регулировать концевой рабочий орган в более широком диапазоне более гибким образом.
Перед сборкой системы хирургических инструментов первый передаточный диск 1100, второй передаточный диск 1200 и третий передаточный диск 1300 могут быть ориентированы произвольно. Однако, когда сборка системы хирургических инструментов завершена, каждый из первого передаточного диска 1100, второго передаточного диска 1200 и третьего передаточного диска 1300 должен иметь заданную ориентацию. В данном случае заданная ориентация называется «нулевое положение», а любая другая ориентация называется «ненулевое положение». На практике нулевое положение может быть задано пользователем по мере необходимости. Например, как показано на фиг. 2a, на которой сборка системы хирургических инструментов завершена, а передаточный модуль соединен с инструментальным наконечником 310 через вал 320 инструмента, ориентацию, которую имеет первый передаточный диск 1100, второй передаточный диск 1200 и третий передаточный диск 1300, определяют как нулевое положение, когда инструментальный наконечник 310 лежит на одной прямой или параллельно валу 320 инструмента. Кроме того, некоторые положения, неблагоприятны для сборки или вращения передаточных дисков, например, положение, где второй зацепляющий компонент 1030 находится в контакте с вершиной первой направляющей поверхности 1010, и положение, где четвертый зацепляющий компонент 1060 находится в контакте с вершиной второй направляющей поверхности 1040. Эти положения называются «наихудшее положение» передаточного узла 1000.
Как показано на фиг. 2c, система хирургических инструментов (более точно, узел инструментального короба) может дополнительно содержать по меньшей мере один набор магнитов для корректировки положения 6000 для содействия в достижении третьим передаточным диском 1300 нулевого положения. Конкретно, набор магнитов для корректировки положения 6000 содержит первый магнит 6100 и второй магнит 6200, первый магнит 6100 расположен на втором корпусе 5000 коробки, второй магнит 6200 расположен на третьем передаточном диске 1300. Этот вариант осуществления не ограничен какими-либо конкретными местами, где расположены первый магнит 6100 и второй магнит 6200, при условии, что первый магнит 6100 и второй магнит 6200 притягивают друг друга, и сила притяжения между первым магнитом 6100 и вторым магнитом 6200 вдоль всей окружности достигает своего максимального значения, когда третий передаточный диск 1300 находится в нулевом положении.
Для третьего передаточного диска 1300 второй магнит 6200 может быть расположен на шестом конце. Как показано на фиг. 5g, на шестом конце третьего передаточного диска 1300 может иметься принимающее отверстие 1340 для приема второго магнита 6200.
Возможно, система хирургических инструментов может дополнительно содержать по меньшей мере один набор 7000 магнитов против смещения (конкретно, стерильный узел 200 содержит набор 7000 магнитов против смещения). Набор 7000 магнитов против смещения выполнен с возможностью предотвращения достижения передаточным узлом 1000 наихудшего положения. Как показано на фиг. 3, набор 7000 магнитов против смещения содержит третий магнит 7100 и четвертый магнит 7200. Третий магнит 7100 может быть расположен на круговой боковой стенке второго передаточного диска 1200, а четвертый магнит 7200 может быть расположен на стенке передаточного отверстия. Когда передаточный узел 1000 находится в наихудшем положении, третий магнит 7100 и четвертый магнит 7200 отталкивают друг друга, и сила отталкивания вызывает вращение второго передаточного диска 1200 и удерживание от наихудшего положения.
Возможно, система хирургических инструментов дополнительно содержит круговой ограничитель, выполненный с возможностью ограничения диапазона вращения третьего передаточного диска 1300 (Конкретно, узел инструментального короба содержит круговой ограничитель). Круговой ограничитель может содержать ограничительный выступ 1350, предусмотренный на круговой боковой стенке третьего передаточного диска 1300. во втором корпусе 5000 коробки может иметься канавка скольжения (не показано), соответствующая ограничительному выступу 1350. в канавке скольжения может быть предусмотрен ограничительный выступ 1350, который может скользить вдоль нее. За счет предоставления кругового ограничителя можно точно регулировать угол вращения третьего передаточного диска 1300, который, в свою очередь, позволяет обеспечить безопасность во время использования хирургического инструмента.
Возможно, система хирургических инструментов дополнительно содержит осевой ограничитель, выполненный с возможностью предотвращения выталкивания второго передаточного диска 1200 со стерильной пластины 4000. Как показано на фиг. 4, стерильная пластина 4000 содержит стерильную подложку 4100 и стерильную крышку 4200. Стерильная подложка 4100A снабжена первым сквозным отверстием 4110, а стерильная крышка 4200 снабжена вторым сквозным отверстием 4210. Второе сквозное отверстие 4210 и первое сквозное отверстие 4110 составляют передаточное отверстие. Кроме того, стерильная крышка 4200 прикреплена с возможностью отсоединения к стерильной подложке 4100, а стерильная подложка 4100 прикреплена с возможностью отсоединения к коробке движущих сил, например с помощью защелкивания). На круговой боковой стенке второго передаточного диска 1200 предоставлен ограничительный буртик 1230, а второе сквозное отверстие 4210 в стерильной крышке 4200 имеет изменяющийся внутренний диаметр. Конкретно, секция второго сквозного отверстия 4210 рядом с первым сквозным отверстием 4110 имеет внутренний диаметр больше каждого из внутреннего диаметра секции второго сквозного отверстия 4210, удаленной от первого сквозного отверстия 4110, и внутреннего диаметра первого сквозного отверстия 4110. Кроме того, внутренний диаметр секции второго сквозного отверстия 4210 рядом с первым сквозным отверстием 4110 соответствует внешнему диаметру ограничительного буртика 1230, а внутренний диаметр секции второго сквозного отверстия 4210, удаленной от первого сквозного отверстия 4110, соответствует внешнему диаметру второго передаточного диска 1200. Таким образом, первое сквозное отверстие 4110 и второе сквозное отверстие 4210 вместе образуют ограничительное углубление, в котором находится ограничительный буртик 1230, так что второй передаточный диск 1200 не выталкивается из передаточного отверстия. Другими словами, ограничительное углубление и ограничительный буртик 1230 вместе составляют осевой ограничитель. В этом варианте осуществления ограничительный буртик 1230 может представлять собой непрерывное ребро, проходящее вдоль окружности второго передаточного диска 1200, или может состоять из множества сегментов ребер, разнесенных вдоль окружности второго передаточного диска 1200.
Обычно, перед сборкой приводного механизма 2000, первого передаточного диска 1100, второго передаточного диска 1200, третьего передаточного диска 1300 и хирургического инструмента 300, каждый из них находится в ненулевом положении. После их сборки каждый из приводного механизма 2000, первого передаточного диска 1100, второго передаточного диска 1200, третьего передаточного диска 1300 и хирургического инструмента 300 должен быть в нулевом положении. В данном случае метрологический термин «нулевое положение» является эталоном для измерения параметров интраоперационного движения (например, направления, смещения, угла и так далее) передающего диска, хирургического инструмента и тому подобное. Как правило, когда хирургический инструмент 300 находится в нулевом положении, инструментальный наконечник 310 лежит на одной прямой или параллелен оси вала 320 инструмента. Подробное описание сборки системы хирургических инструментов приведено ниже.
Прежде всего, когда на приводном механизме 2000 предоставлен кодовый датчик (не показано), с помощью кодового датчика может быть получена информация о положении первого передаточного диска 1100 после включения системы. Затем приводной механизм 2000 приводит в действие первый передаточный диск 1100 с поворотом в нулевое положение. Этим процессом можно управлять с помощью заранее определенной программы. При достижении нулевого положения первый передаточный диск 1100 оставляют в этом положении. После этого второй передаточный диск 1200 может быть сцеплен с первым передаточным диском 1100 в любой ориентации и прямо достигает своего нулевого положения.
После этого второй передаточный диск 1200 вводят в зацепление с первым передаточным диском 1100. Второй передаточный диск 1200 в ненулевом положении входит в контакт с первым передаточным диском 1100 под действием внешней силы. Потом второй зацепляющий компонент 1030 скользит вдоль первой направляющей поверхности и точно попадает в первый зацепляющий компонент 1020 с зацеплением первого зацепляющего компонента 1020. В это время второй передаточный диск точно поворачивается в нулевое положение.
После этого регулируют положение инструментального наконечника 310. Как показано на фиг. 2b, хирургический инструмент содержит инструментальный наконечник 310 и вал 320 инструмента, которые соединены друг с другом. Инструментальный наконечник 310, например, представляет собой пинцет. Перед сборкой системы хирургических инструментов нужно вставить вал 320 инструмента в троакар 400, который помещают в разрез человеческого тела, чтобы инструментальный наконечник 310 хирургического инструмента 300 в системе хирургических инструментов можно было вставить в человеческое тело.
Поскольку внутренний диаметр троакара 400 сравним с внешним диаметром инструментального наконечника 310, чтобы успешно вставить пинцет в троакар 400, пинцет нужно выпрямить, чтобы его ось симметрии совпадала с осью вала 320 инструмента. В этом процессе третий передаточный диск 1300 будет принудительно вращаться. Когда ось симметрии пинцета лежит на одной прямой с осью вала 320 инструмента, третий передаточный диск 1300 достигает своего нулевого положения. Однако на практике ручная регулировка может установить третий передаточный диск 1300 только приблизительно в его нулевое положение.
Следовательно, третий передаточный диск 1300 входит в контакт со вторым передаточным диском 1200 под действием внешней силы. Потом четвертый зацепляющий компонент 1060 скользит вдоль второй направляющей поверхности и точно попадают в третий зацепляющий компонент 1050 с зацеплением третьего зацепляющего компонента 1050. В этом время третий передаточный диск 1300 точно поворачивается в нулевое положение.
Кроме того, следует отметить, что, хотя информация об ориентации первого передаточного диска 1100 может быть измерена до сборки системы хирургических инструментов, невозможно получить информацию об ориентации третьего передаточного диска 1300. Когда второй передаточный диск 1200 и третий передаточный диск 1300 собраны согласно этапам, описанным выше, третий передаточный диск 1300 можно регулировать вручную так, чтобы он находился примерно в своем нулевом положении с определенным угловым отклонением. Когда это угловое отклонение меньше устойчивого к отказам угла, третий передаточный диск 1300 может обеспечить точную установку инструмента на ноль.
Устойчивый к отказам угол зависит от количества зацепляющих компонентов на третьем передаточном диске 1300. взяв для примера третий передаточный диск 1300, снабженный двумя четвертыми зацепляющими компонентами 1060 (то есть предусмотрено четыре первых направляющих поверхности 1010), допустимое угловое отклонение третьего передаточного диска 1300 относительно нулевого положения превышает ±90°. В этом случае четвертые зацепляющие компоненты 1060 могут успешно скользить и, таким образом, входят в зацепление с третьими зацепляющими компонентами 1500 при условии, что четвертые зацепляющие компоненты 1060 расположены между двумя вершинами. В данном случае угол между соседними вершинами называется устойчивым к отказам углом. Устойчивый к отказам угол в этом примере составляет 180°. Действительно, устойчивый к отказам угол равен 360°/N, где N представляет количество четвертых зацепляющих компонентов 1060. Когда угловое отклонение находится в пределах устойчивого к отказам угла, инструментальный наконечник 310 может сохранять то же положение во время множества процессов сборки системы хирургических инструментов. Такая характеристика облегчает определение информации об абсолютном положении отдельных передаточных дисков после сборки системы хирургических инструментов, таким образом обеспечивая безопасность хирургической операции.
Третьей целью настоящего раскрытия является предоставление хирургического робота, содержащего систему хирургических инструментов, описанную выше. Кроме того, хирургический робот дополнительно содержит роботизированную руку для удерживания системы хирургических инструментов. Приводной узел 100 прикреплен к наконечнику роботизированной руки. Например, наконечник роботизированной руки содержит подвижное сочленение, и приводной узел 100 расположен на подвижном сочленении и двигается при движениях подвижного сочленения. Стерильный узел 200 предоставлен на стерильном пакете и соединен с возможностью отсоединения с приводным узлом 100. Хирургический инструмент соединен с возможностью отсоединения со стерильным узлом 200 через узел инструментального короба.
В альтернативном варианте осуществления хирургический робот может быть полностью стерилизован с использованием специального способа стерилизации (например, стерилизации озоном, стерилизации пероксидом водорода и так далее). В этом случае система хирургических инструментов может содержать приводной узел 100 и хирургический инструмент 300. Соответственно, передаточный узел соединен с интерфейсами передачи, предусмотренными в приводном узле 100, составляя передаточный узел таким образом, чтобы прямо передавать движущую силу, обеспечиваемую приводным узлом 100, непосредственно в узел инструментального короба.
Четвертой целью настоящего раскрытия является предоставление приводного узла 100. Приводной узел 100 содержит: приводной механизм 2000 и первый корпус 3000 коробки, выполненный с возможностью размещения приводного механизма 2000 и снабженный по меньшей мере одним выходным отверстием (не отмечено на фигурах); и по меньшей мере один передаточный диск, который входит в зацепление с другим передаточным диском, содержащим другой зацепляющий компонент. Передаточный диск расположен с возможностью вращения в выходном отверстии и имеет две противоположные концевые части, одна из которых соединена с приводным механизмом 2000, а другая имеет направляющую поверхность, образованную на ее торцевой стороне. Кроме того, по меньшей мере один зацепляющий компонент предоставлен на направляющей поверхности, и направляющая поверхность выполнена с возможностью вызывать перемещение другого зацепляющего компонента вдоль направляющей поверхности и зацепление по меньшей мере с одним зацепляющим компонентом. В альтернативном варианте осуществления приводной узел 100 содержит один передаточный диск, который входит в зацепление с другим передаточным диском, содержащим другой зацепляющий компонент и другую направляющую поверхность. Передаточный диск расположен в выходном отверстии и имеет две противоположные концевые части. Одна из двух противоположных концевых частей соединена с приводным механизмом 2000, а другая из двух противоположных концевых частей имеет по меньшей мере один зацепляющий компонент, образованный на ее торцевой стороне. Зацепляющий компонент выполнен с возможностью перемещения вдоль направляющей поверхности другого передаточного диска и зацепления с зацепляющим компонентом другого передаточного диска.
Как показано на фиг. 11, в одном варианте осуществления передаточным диском может быть первый передаточный диск 1100, а другим передаточным диском может быть второй 1200 или третий 1300 передаточный диск. Первый конец первого передаточного диска 1100 выполнен с возможностью соединения с приводным механизмом 2000. Например, первая соединительная бабка 1110 предоставлена на первом конце, а в первой соединительной бабке 1110 предусмотрено первое соединительное отверстие 1120, выполненное с возможностью приема выходного вала приводного механизма. Кроме того, в боковой стенке первой соединительной бабки 1110 предоставлено фиксирующее отверстие 1130, сообщающееся с первым соединительным отверстием 1120. Фиксирующее отверстие 1130 выполнено с возможностью вызывать синхронизированное вращение выходного вала приводного механизма с первым передаточным диском 1100. Первая направляющая поверхность 1010 образована на втором конце первого передаточного диска 1100. Первая направляющая поверхность 1010 имеет две вершины и две впадины, которые расположены вдоль окружности торцевой стороны, где находится первая направляющая поверхность 1010.
На первой направляющей поверхности 1010 предусмотрено два первых зацепляющих компонента 1020. первый зацепляющий компонент 1020 представляет собой углубление, предусмотренное в соответствующей впадине. Первая направляющая поверхность 1010 выполнена таким образом, что второй зацепляющий компонент второго 1200 или третьего 1300 передаточного диска скользит вдоль первой направляющей поверхности до его зацепления с первыми зацепляющими компонентами 1020 для обеспечения передачи крутящего момента.
Пятой целью настоящего раскрытия является предоставление стерильного узла 200. Как показано на фиг. 12, стерильный узел 200 содержит: по меньшей мере одну стерильную пластину 4000, снабженную по меньшей мере одним передаточным отверстием; по меньшей мере один передаточный диск, который входит в зацепление с другим передаточным диском, содержащим другой зацепляющий компонент, причем передаточный диск расположен с возможностью вращения в передаточном отверстии и имеет две противоположные концевые части. По меньшей мере одна из двух противоположных концевых частей имеет направляющую поверхность, образованную на ее торцевой стороне, и направляющая поверхность снабжена по меньшей мере одним зацепляющим компонентом. Направляющая поверхность выполнена таким образом, что другой зацепляющий компонент двигается вдоль направляющей поверхности до его зацепления с по меньшей мере одним зацепляющим компонентом. В альтернативном варианте осуществления кроме стерильной пластины 4000, снабженной по меньшей мере одним передаточным отверстием, стерильный узел 200 дополнительно содержит по меньшей мере один передаточный диск, который входит в зацепление с другим передаточным диском, содержащим направляющую поверхность и другой зацепляющий компонент, предусмотренный на направляющей поверхности. По меньшей мере один передаточный диск расположен с возможностью вращения в передаточном отверстии и имеет две противоположные концевые части. Зацепляющий компонент образован по меньшей мере одной из двух концевых частей. Зацепляющий компонент выполнен с возможностью перемещения вдоль направляющей поверхности и входят в зацепление с другим зацепляющим компонентом.
Конкретно, передаточным диском может быть второй передаточный диск 1200. Второй передаточный диск 1200 выполнен с возможностью зацепления с каждым из первого передаточного диска 1100 и третьего передаточного диска 1300. В одном варианте осуществления, показанном на фиг. 13, направляющая поверхность образована на каждой из торцевых сторон двух концов второго передаточного диска 1200, а на каждой направляющей поверхности предоставлен зацепляющий компонент. Соответственно, другие зацепляющие компоненты предусмотрены на торцевых сторонах первого передаточного диска 1100 и третьего передаточного диска 1300. то есть второй зацепляющий компонент 1030 предоставлен на торцевой стороне второго конца первого передаточного диска 1100 а четвертый зацепляющий компонент 1060 предоставлен на торцевой стороне пятого конца третьего передаточного диска 1300. Первая направляющая поверхность 1010 может быть образована на торцевой стороне третьего конца второго передаточного диска 1200, а на первой направляющей поверхности 1010 может иметься по меньшей мере один первый зацепляющий компонент 1020, выполненный с возможностью зацепления со вторым зацепляющим компонентом 1030. Предпочтительно первый зацепляющий компонент 1020 представляет собой углубление. Вторая направляющая поверхность 1040 предоставлена на торцевой стороне четвертого конца второго передаточного диска 1200, а на второй направляющей поверхности 1040 может иметься по меньшей мере один третий зацепляющий компонент 1050, выполненный с возможностью зацепления с четвертым зацепляющим компонентом. Предпочтительно третий зацепляющий компонент 1050 представляет собой углубление. Первая направляющая поверхность 1010 выполнена таким образом, что второй зацепляющий компонент 1030 двигается вдоль первой направляющей поверхности 1010 до его зацепления с первым зацепляющим компонентом 1020, чтобы обеспечить передачу крутящего момента между первым передаточным диском 1100 и вторым передаточным диском 1200. Вторая направляющая поверхность 1040 выполнена так, что четвертый зацепляющий компонент 1060 может двигаться по ней в зацепление с третьим зацепляющим компонентом 1050, обеспечивая передачу крутящего момента между вторым передаточным диском 1200 и третьим передаточным диском 1300.
Снова со ссылкой на фиг. 4, стерильная пластина 4000 содержит стерильную подложку 4100 и стерильную крышку 4200. Первое сквозное отверстие 4110 предоставлено в стерильной подложке 4100, а второе сквозное отверстие 4210 предоставлен в стерильной крышке 4200. Второе сквозное отверстие 4210 и первое сквозное отверстие 4110 вместе составляют передаточное отверстие. Кроме того, стерильная крышка 4200 прикреплена с возможностью отсоединения к стерильной подложке 4100. Стерильная крышка 4200 может предотвращать вытеснение передаточного диска из стерильной подложки 4100. Кроме того, на круговой боковой стенке второго передаточного диска 1200 предоставлен ограничительный буртик 1230, а второе сквозное отверстие 4210 в стерильной крышке 4200 имеет изменяющийся внутренний диаметр. Конкретно, секция второго сквозного отверстия 4210 рядом с первым сквозным отверстием 4110 имеет внутренний диаметр больше каждого из внутреннего диаметра секции второго сквозного отверстия 4210, удаленной от первого сквозного отверстия 4110, и внутреннего диаметра первого сквозного отверстия 4110. Кроме того, внутренний диаметр секции второго сквозного отверстия 4210 рядом с первым сквозным отверстием 4110 соответствует внешнему диаметру ограничительного буртика 1230, а внутренний диаметр секции второго сквозного отверстия 4210, удаленной от первого сквозного отверстия 4110, соответствует внешнему диаметру второго передаточного диска 1200. Кроме того, внутренний диаметр первого сквозного отверстия 4110 также соответствует внешнему диаметру второго передаточного диска 1200. Таким образом, первое сквозное отверстие 4110 и второе сквозное отверстие 4210 вместе образуют ограничительное углубление, на котором находится ограничительный буртик 1230, так что второй передаточный диск 1200 не выталкивается из передаточного отверстия.
В альтернативном варианте осуществления, показанном на фиг. 14, направляющая поверхность образована на торцевой стороне одного конца второго передаточного диска 1200, а на направляющей поверхности предоставлен по меньшей мере каждый первый зацепляющий компонент 1020, реализованный в виде углубления. Например, первая направляющая поверхность 1010 предоставлена на торцевой стороне третьего конца второго передаточного диска 1200. На первой направляющей поверхности 1010 предоставлен по меньшей мере каждый первый зацепляющий компонент 1020, реализованный в виде углубления, а на торцевой стороне четвертого конца второго передаточного диска 1200 предоставлен по меньшей мере один четвертый зацепляющий компонент 1060, реализованный в виде выступа. В этом случае на торцевой стороне четвертого конца может иметься вторая сопряженная поверхность 1003, а на второй сопряженной поверхности 1003 предоставлен четвертый зацепляющий компонент 1060.
Конечно, в альтернативном варианте осуществления, показанном на фиг. 15, на торцевой стороне четвертого конца может иметься кольцевая вторая защитная стенка 1006, окружающая и соединенная с четвертым зацепляющим компонентом 1060.
Кроме того, нужно понять, что, в этом варианте осуществления второй передаточный диск может иметь вторую направляющую поверхность, образованную на торцевой стороне четвертого конца, и второй зацепляющий компонент, предусмотренный на торцевой стороне третьего конца. В связи с этим первая сопряженная поверхность может быть образована на торцевой стороне третьего конца. Альтернативно, на торцевой стороне третьего конца второго передаточного диска предоставлена кольцевая первая защитная стенка (не показано), окружающая и соединенная со вторым зацепляющим компонентом.
Кроме того, на торцевых сторонах противоположных концов второго передаточного диска 1200 предусмотрены второй и четвертые зацепляющие компоненты, соответственно. Второй зацепляющий компонент выполнен с возможностью перемещения вдоль первой направляющей поверхности и зацепления с первым зацепляющим компонентом на первой направляющей поверхности для обеспечения передачи крутящего момента между первым и вторым передаточными дисками. Четвертый зацепляющий компонент выполнен с возможностью перемещения вдоль второй направляющей поверхности и зацепления с третьим зацепляющим компонентом на второй направляющей поверхности для обеспечения передачи крутящего момента между вторым и третьим передаточными дисками.
Кроме того, первый зацепляющий компонент 1020 может совпадать с четвертым зацепляющим компонентом 1060, так что первый зацепляющий компонент 1020 может входить в зацепление с четвертым зацепляющим компонентом 1060. На основе этого стерильный узел 200 может содержать две стерильные пластины 4000, которые прикреплены с возможностью отсоединения друг к другу. Как показано на фиг. 16, двумя стерильными пластинами 4000 являются первая стерильная пластина 4000a и вторая стерильная пластина 4000b. Первая стерильная пластина 4000a и вторая стерильная пластина 4000b могут иметь идентичную конструкцию, и каждая содержит стерильную подложку 4100 и стерильную крышку 4200, соединенную с возможностью отсоединения со стерильной подложкой 4100. Этот стерильный узел подходит для случаев, требующих многослойной стерильной защиты. Нужно понять, что хотя стерильный узел был описан в данном документе как содержащий, например, две стерильные пластины 4000, при практическом использовании, он может также содержать три или более стерильные пластины 4000.
Шестой целью настоящего раскрытия является предоставление узла инструментального короба для хирургического инструмента 300, содержащего вал 320 инструмента и инструментальный наконечник 310. Как показано на фиг. 2a-2c, узел инструментального короба содержит инструментальный короб и передаточный диск для зацепления с другим передаточным диском, содержащим другой зацепляющий компонент. Инструментальный короб содержит второй корпус 5000 коробки и передаточный модуль (не показано на фигурах). Кроме того, второй корпус 5000 коробки содержит основание, а в основании предоставлено по меньшей мере одно входное отверстие. Передаточный модуль соединен с валом 320 инструмента и/или инструментальным наконечником 310 таким образом, чтобы приводить в движение вал 320 инструмента и/или инструментальный наконечник 310. Передаточный диск расположен с возможностью вращения во входном отверстии и имеет две противоположные концевые части. Одна из двух концевых частей соединена с передаточным модулем, а другая из двух концевых частей имеет направляющую поверхность, образованную на ее торцевой стороне. По меньшей мере один зацепляющий компонент предоставлен на направляющей поверхности, а направляющая поверхность выполнена таким образом, что другой зацепляющий компонент на другом передаточном диске двигается вдоль направляющей поверхности до его зацепления с по меньшей мере одним зацепляющим компонентом. В альтернативном варианте осуществления передаточный диск, выполненный с возможностью взаимодействия с другим передаточным диском, содержащим направляющую поверхность и другой зацепляющий компонент, расположен во входном отверстии и имеет две противоположные концевые части. Одна из концевых частей соединена с передаточным модулем, и другая из концевых частей имеет зацепляющий компонент, предусмотренный на ее торцевой стороне. Зацепляющий компонент выполнен с возможностью перемещения вдоль направляющей поверхности и зацепления с другим зацепляющим компонентом.
Как показано на фиг. 17 и 18, в этом варианте осуществления передаточным диском может быть третий передаточный диск 1300, а другим передаточным диском может быть второй передаточный диск 1200 или первый передаточный диск 1100. Третий передаточный диск 1300 имеет вторую направляющую поверхность 1040, образованную на его пятом конце, а на второй направляющей поверхности 1040 по окружности предусмотрена по меньшей мере одна вершина и по меньшей мере одна впадина. Третий зацепляющий компонент 1050 предоставлен на второй направляющей поверхности 1040. Конкретно, третий зацепляющий компонент 1050 представляет собой углубление и находится во впадине.
Как обсуждалось выше, инструментальный наконечник 310 содержит несколько сочленений. Передаточный модуль содержит вращающийся элемент, гибкий элемент и группу направляющих шкивов. Гибкий элемент выполнен с возможностью соединения вращающегося элемента с сочленением инструментального наконечника 410. Группа направляющих шкивов выполнена с возможностью изменения направления продолжения гибкого элемента. Вращающийся элемент выполнен с возможностью приведения в движение сочленения инструментального наконечника 310 посредством гибкого элемента. Кроме того, вал 320 инструмента имеет один конец, соединенный с инструментальным наконечником 310, и другое конец, соединенный с возможностью вращения со вторым корпусом 5000 коробки. Передаточный модуль дополнительно выполнен с возможностью приведения вала 320 инструмента во вращение вокруг своей оси. Этот вариант осуществления не ограничен каким-либо конкретным средством приведения вала 320 инструмента во вращение вокруг своей оси. Например, вращающийся элемент соединен с валом 320 инструмента шестерней. Шестой конец третьего передаточного диска 1300 выполнен с возможностью прохождения через входное отверстие и соединения с вращающимся элементом. В данном случае третий передаточный диск 1300 может быть соединен с вращающимся элементом либо с возможностью отсоединения или в виде единого целого.
Кроме того, узел инструментального короба также содержит круговой ограничитель, выполненный с возможностью ограничения диапазона вращения третьего передаточного диска 1300. Круговой ограничитель содержит ограничительный выступ 1350, предусмотренный на круговой боковой стенке третьего передаточного диска 1300. Соответственно, канавка скольжения (не показано) предоставлена на втором корпусе 5000 коробки. Ограничительный выступ 1350 взаимодействует с канавкой скольжения для ограничения диапазона вращения третьего передаточного диска 1300. За счет предоставления кругового ограничителя можно точно управлять углом вращения третьего передаточного диска 1300, что, в свою очередь, позволяет обеспечивать безопасность во время использования хирургического инструмента. В общем, ограничительный выступ 1350 на толстом участке третьего передаточного диска 1300 имеет хорошее состояние напряжения.
Кроме того, как показано на фиг. 2c, узел инструментального короба может дополнительно содержать набор 6000 магнитов для корректировки положения для содействия в достижении третьим передаточным диском 1300 нулевого положения. Набор магнитов для корректировки положения содержит первый магнит 6100 и второй магнит 6200. Первый магнит 6100 расположен на третьем передаточном диске 1300, тогда как второй магнит 6200 предоставлен на втором корпусе 5000 коробки. Кроме того, первый магнит 6100 и второй магнит 6200 выполнены таким образом, чтобы обеспечивать между ними максимальную силу магнитного притяжения, когда третий передаточный диск 1300 находится в нулевом положении.
Хотя настоящее изобретение было раскрыто выше, оно не ограничено приведенным выше раскрытием. Специалисты в данной области могут делать разные изменения и модификации раскрытия без отклонения от его сути и объема. Соответственно, предполагается, что любое и все такие изменения и модификации также попадают в объем настоящего раскрытия, определяемый приложенной формулой изобретения и ее эквивалентами.
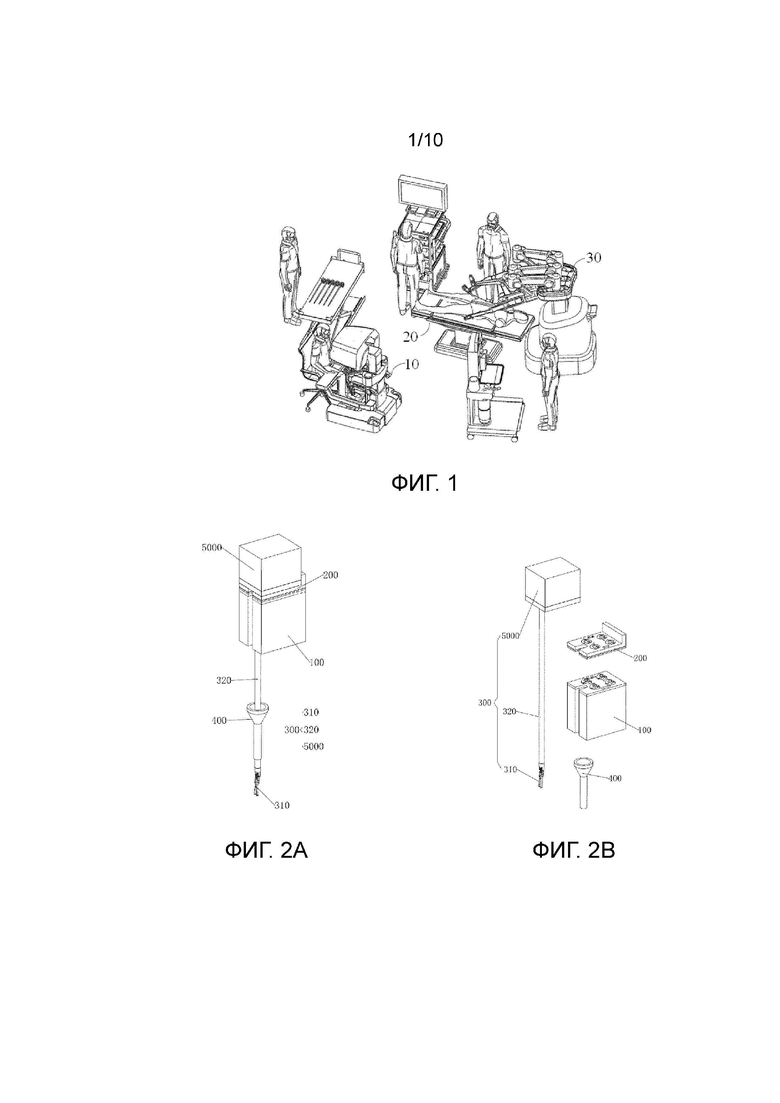

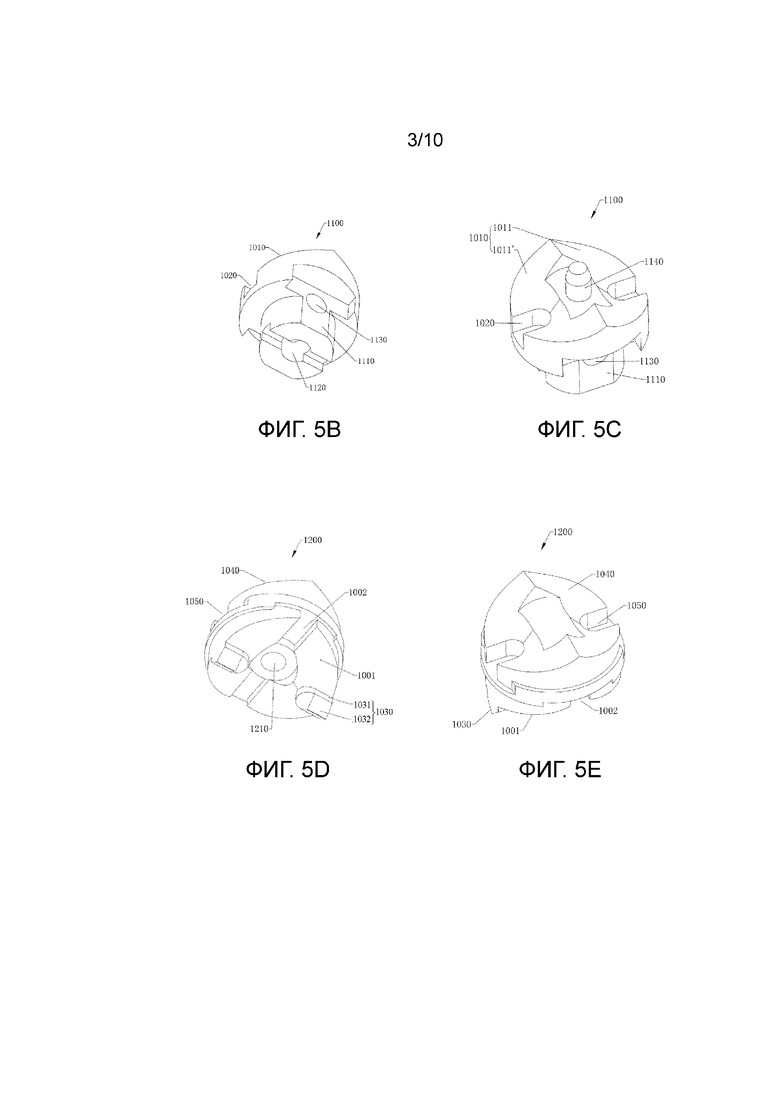
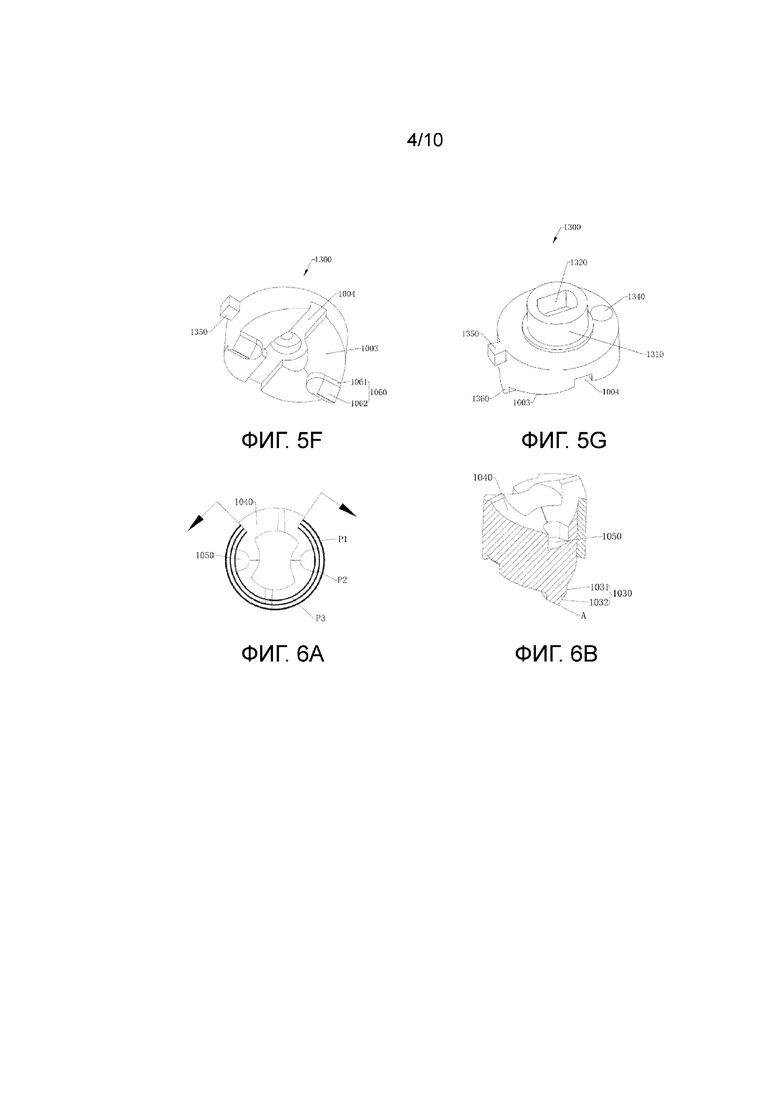

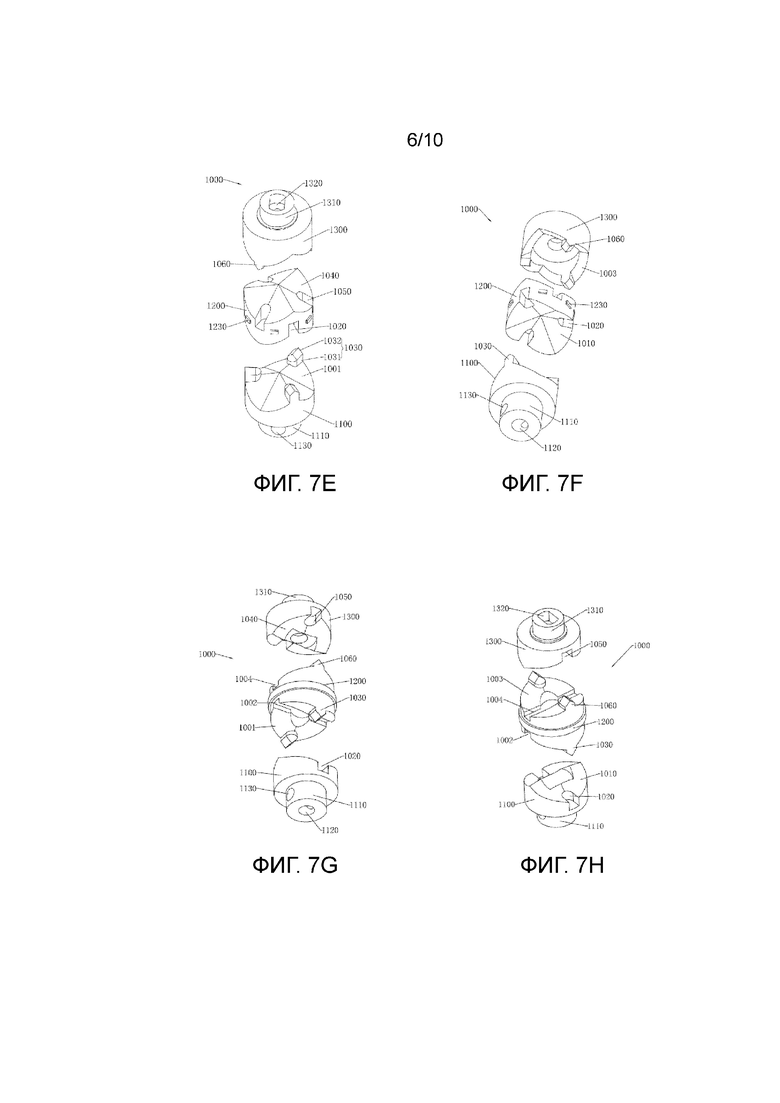
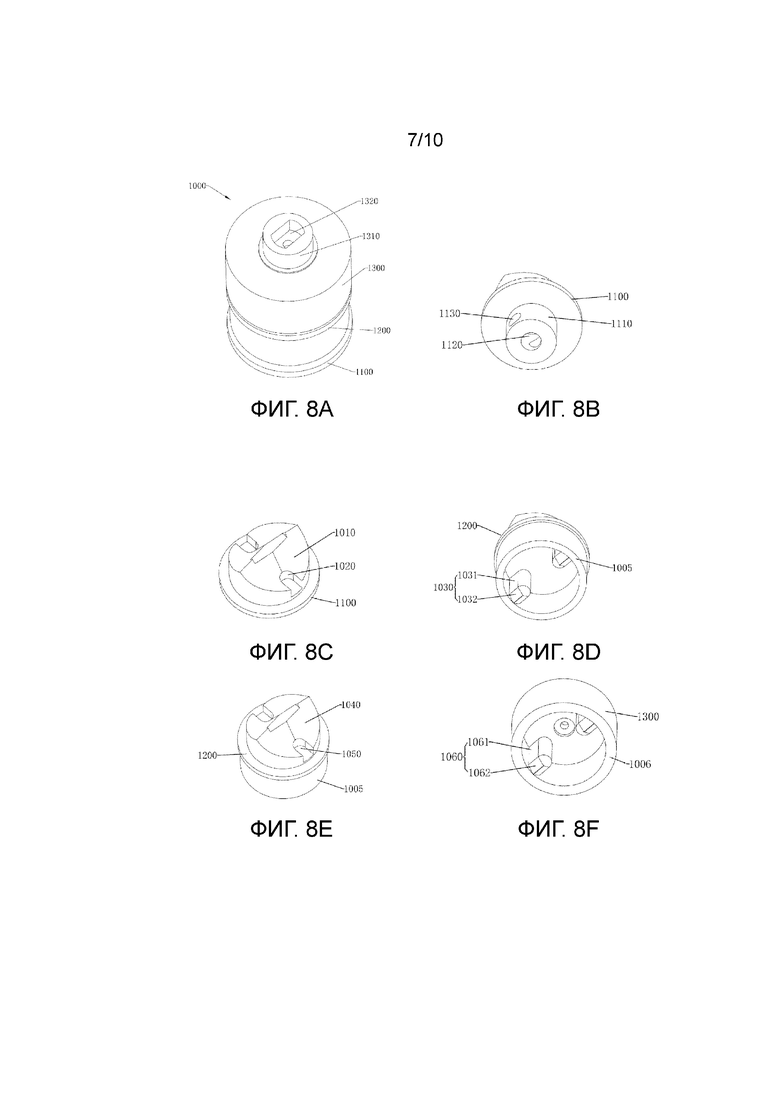
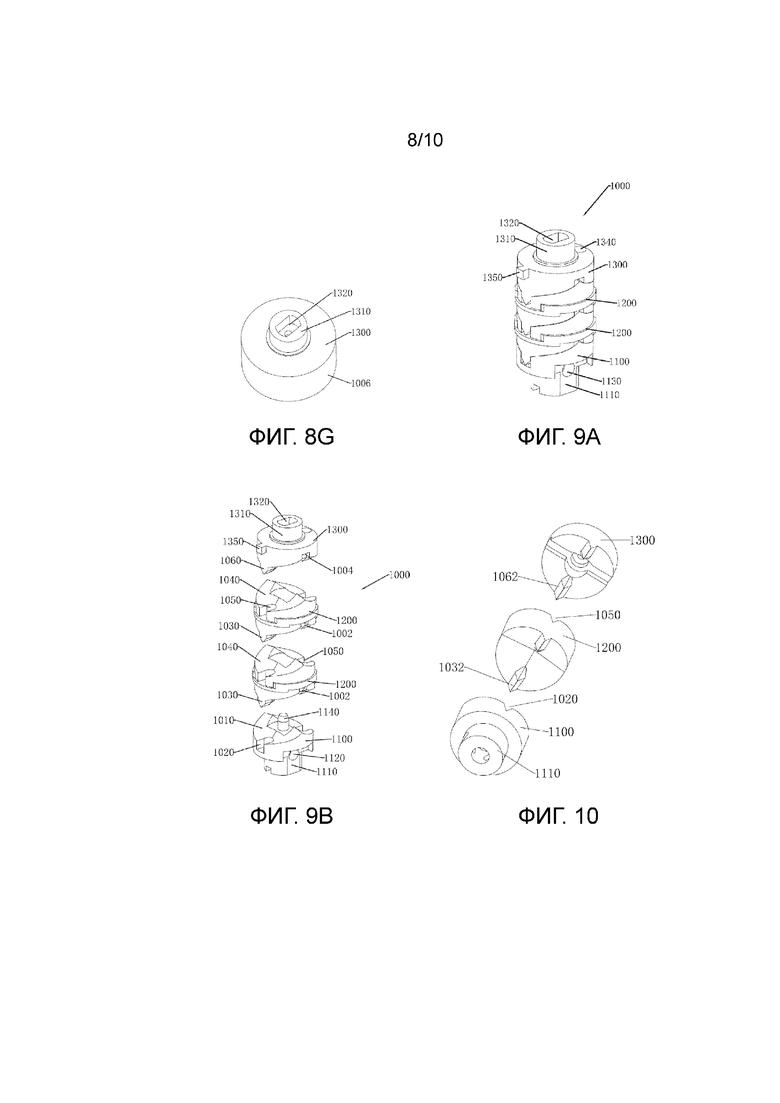
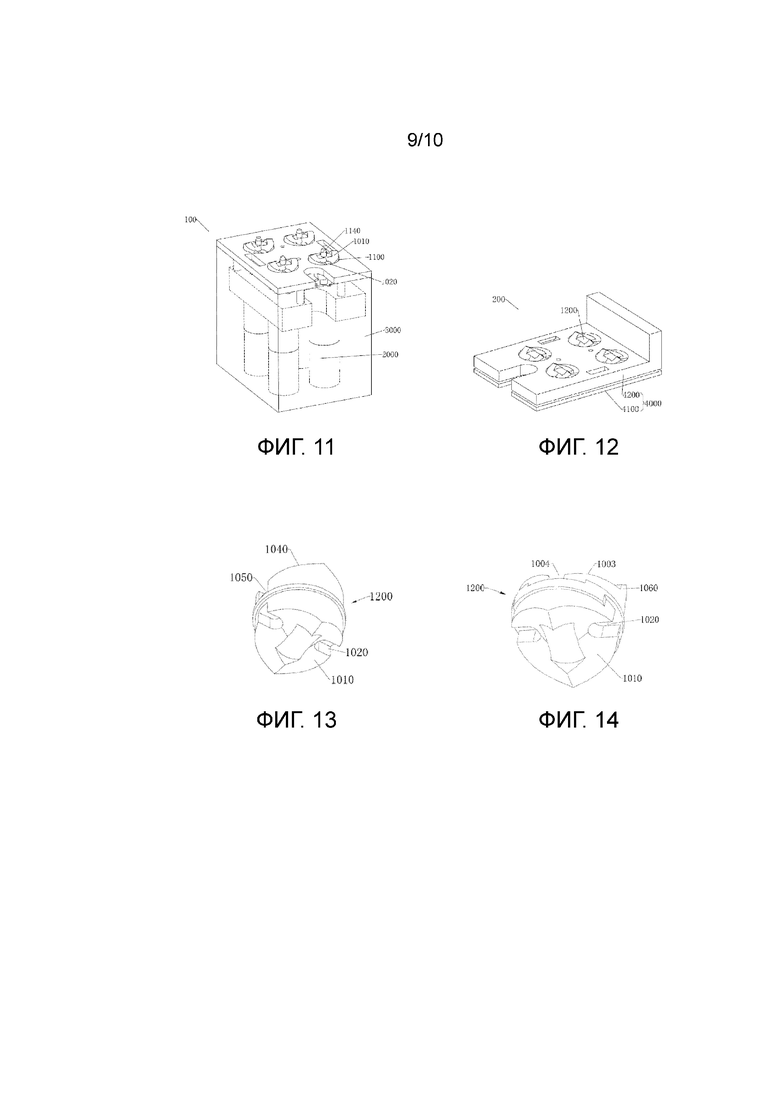
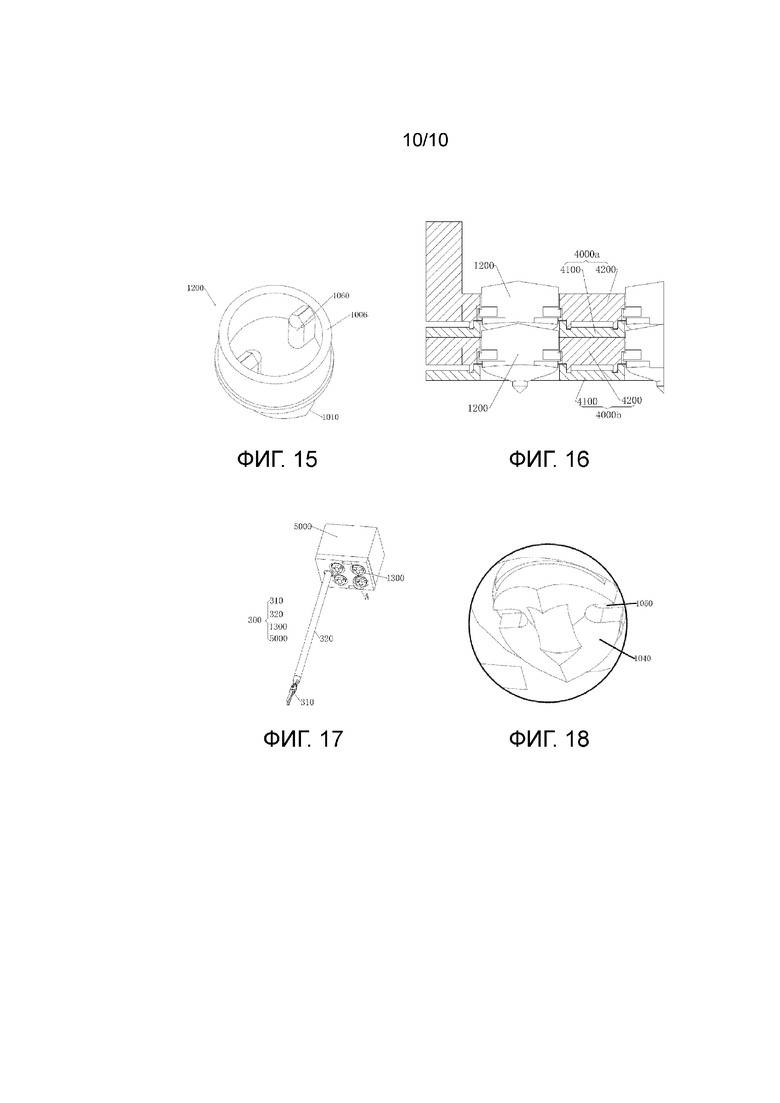
Группа изобретений относится к медицине, а именно к передаточным, приводным и стерильным узлам для хирургического инструмента, а также к хирургическим инструменту, системе и роботу. Передаточный узел для хирургического инструмента содержит первый передаточный диск и второй передаточный диск. Первый передаточный диск имеет второй конец, а второй передаточный диск имеет третий конец, расположенный торец к торцу со вторым концом. Одна из торцевой стороны второго конца и торцевой стороны третьего конца имеет образованную на ней первую направляющую поверхность, а другая из торцевой стороны второго конца и торцевой стороны третьего конца снабжена вторым зацепляющим компонентом. Первый зацепляющий компонент предоставлен на первой направляющей поверхности, а второй зацепляющий компонент выполнен с возможностью зацепления с первым зацепляющим компонентом. Второй зацепляющий компонент выполнен с возможностью перемещения вдоль первой направляющей поверхности до зацепления второго зацепляющего компонента с первым зацепляющим компонентом, чтобы обеспечить передачу крутящего момента между первым передаточным диском и вторым передаточным диском. Система хирургического инструмента для хирургического робота содержит коробку движущих сил с приводным механизмом, хирургический инструмент, передаточный узел и стерильную пластину. Достигается быстрое и прочное зацепление между хирургическим инструментом и стерильной пластиной, что позволяет избежать возникновения отказа соединения и повысить безопасность хирургического робота. 8 н. и 22 з.п. ф-лы, 18 ил.
1. Передаточный узел для хирургического инструмента, содержащий первый передаточный диск и второй передаточный диск, причем:
первый передаточный диск имеет второй конец, а второй передаточный диск имеет третий конец, расположенный торец к торцу со вторым концом,
одна из торцевой стороны второго конца и торцевой стороны третьего конца имеет образованную на ней первую направляющую поверхность, а другая из торцевой стороны второго конца и торцевой стороны третьего конца снабжена вторым зацепляющим компонентом, причем по меньшей мере один первый зацепляющий компонент предоставлен на первой направляющей поверхности, а второй зацепляющий компонент выполнен с возможностью зацепления с первым зацепляющим компонентом, и
второй зацепляющий компонент выполнен с возможностью перемещения вдоль первой направляющей поверхности до зацепления второго зацепляющего компонента с первым зацепляющим компонентом, чтобы обеспечить передачу крутящего момента между первым передаточным диском и вторым передаточным диском,
причем первая направляющая поверхность имеет по меньшей мере одну вершину и по меньшей мере одну впадину, которые распределены по окружности вдоль торцевой стороны конца, на котором образована первая направляющая поверхность.
2. Передаточный узел по п. 1, в котором осевая проекция первой направляющей поверхности имеет диаметр больше или равный десятой части осевого расстояния от вершины до впадины первой направляющей поверхности.
3. Передаточный узел по п. 1, в котором второй конец первого передаточного диска дополнительно снабжен первым установочным штифтом, проходящим в осевом направлении, а третий конец второго передаточного диска дополнительно снабжен первым установочным отверстием, проходящим в осевом направлении, причем первый установочный штифт и первое установочное отверстие выполнены с возможностью взаимодействия друг с другом для облегчения концентрического расположения первого передаточного диска и второго передаточного диска.
4. Передаточный узел по п. 3, в котором первый зацепляющий компонент представляет собой углубление, а второй зацепляющий компонент представляет собой выступ, при этом первая защитная стенка, окружающая выступ, предусмотрена на торцевой стороне, где предоставлен второй зацепляющий компонент, а первая защитная стенка является кольцеобразной и соединена с выступом; и
при этом осевая проекция торцевой стороны, где находится первая направляющая поверхность, имеет диаметр, меньше или равный внутреннему диаметру первой защитной стенки.
5. Передаточный узел по п. 4, в котором а) второй зацепляющий компонент содержит первый направляющий участок и первый участок передачи движущей силы,
при этом первый направляющий участок выполнен с возможностью контакта с первой направляющей поверхностью для направления скольжения второго зацепляющего компонента вдоль первой направляющей поверхности, и
первый участок передачи движущей силы выполнен с возможностью передачи движущей силы, когда первый зацепляющий компонент находится в зацеплении со вторым зацепляющим компонентом, или
b) второй зацепляющий компонент содержит первый направляющий участок, и при этом первый направляющий участок выполнен с возможностью контакта с первой направляющей поверхностью для направления скольжения второго зацепляющего компонента вдоль первой направляющей поверхности и для передачи движущей силы, когда второй зацепляющий компонент находится в зацеплении с первым зацепляющим компонентом
6. Передаточный узел по п. 5, в котором:
в a) каждая из осевой проекции первого зацепляющего компонента и осевой проекции первого участка передачи движущей силы имеет форму серпообразного эллипсоида, или
каждая из осевой проекции первого зацепляющего компонента и осевой проекции первого участка передачи движущей силы имеет форму веера, и веер, образованный первым зацепляющим компонентом, имеет угол больше или равный углу веера, образованного первым участком передачи движущей силы, и
в b) первый направляющий участок и первый зацепляющий компонент выполнены с возможностью поверхностного контакта для увеличения силы трения между ними.
7. Передаточный узел по любому из пп. 5-6, в котором предусмотрено по меньшей мере два вторых зацепляющих компонента, и при этом первая направляющая поверхность и вторые зацепляющие компоненты выполнены таким образом, что, когда осевую внешнюю силу прикладывают ко второму передающему диску, а первая направляющая поверхность находится в контакте со вторыми зацепляющими компонентами, на вторые компоненты зацепления действуют неуравновешенные силы.
8. Передаточный узел по п. 7, в котором каждый из вторых зацепляющих компонентов содержит первый направляющий участок, причем каждый первый направляющий участок содержит две клиновидные поверхности, которые образуют первую линию пересечения;
при этом первая направляющая поверхность содержит направляющие вспомогательных поверхностей, которые соединены последовательно, и соседние направляющие вспомогательные поверхности образуют вторую линию пересечения на вершинах первой направляющей поверхности; и
при этом первая и вторая линии пересечения выполнены таким образом, что, когда вторые зацепляющие компоненты находятся в контакте с первой направляющей поверхностью на вершинах первой направляющей поверхности, осевая проекция первой линии пересечения по меньшей мере частично совпадает с осевой проекцией соответствующей второй линии пересечения; или первая и вторая линии пересечения выполнены таким образом, что, когда вторые зацепляющие компоненты находятся в контакте с первой направляющей поверхностью на вершинах первой направляющей поверхности, по меньшей мере две осевых проекции первых линий пересечения находятся на одной прямой, и по меньшей мере две осевых проекции вторых линий пересечения находятся на одной прямой, или при этом
каждый из вторых зацепляющих компонентов содержит первый направляющий участок, причем каждый первый направляющий участок содержит две клиновидные поверхности и одну первую переходную поверхность между двумя клиновидными поверхностями, при этом первая переходная поверхность разрезана группой плоских или изогнутых воображаемых режущих поверхностей, и между первой переходной поверхностью и группой плоских или изогнутых воображаемых режущих поверхностей образована группа линий пересечения разреза, и при этом первая линия пересечения образована в виде соединительной линии, образованной за счет соединения каждой из характерных точек группы линий пересечения разреза;
при этом первая направляющая поверхность содержит направляющие вспомогательных поверхностей, причем соседние направляющие вспомогательные поверхности соединены второй переходной поверхностью на вершине первой направляющей поверхности, причем вторая переходная поверхность разрезана группой плоских или изогнутых воображаемых режущих поверхностей, и между второй переходной поверхностью и группой плоских или изогнутых воображаемых режущих поверхностей образована группа линий пересечения разреза, и при этом вторая линия пересечения образована в виде соединительной линии, образованной за счет соединения каждой из характерных точек группы линий пересечения разреза; и
при этом первая и вторая линии пересечения выполнены таким образом, что, когда первый зацепляющий компонент находится в зацеплении со вторыми зацепляющими компонентами, осевая проекция первой линии пересечения по меньшей мере частично совпадает с осевой проекцией соответствующей второй линии пересечения; или первые линии пересечения и вторые линии пересечения выполнены таким образом, что, когда первый зацепляющий компонент находится в зацеплении со вторыми зацепляющими компонентами, по меньшей мере две осевых проекции первых линий пересечения находятся на одной прямой, и по меньшей мере две осевых проекции вторых линий пересечения находятся на одной прямой.
9. Передаточный узел по п. 1, в котором первая сопряженная поверхность образована на торцевой стороне, где находится второй зацепляющий компонент, а второй зацепляющий компонент предоставлен на первой сопряженной поверхности, причем первая сопряженная поверхность выполнена так, чтобы не препятствовать перемещению второго зацепляющего компонента вдоль первой направляющей поверхности и входить в зацепление с первым зацепляющим компонентом.
10. Передаточный узел по п. 9, в котором первая направляющая поверхность имеет по меньшей мере одну вершину и по меньшей мере одну впадину, которые распределены по окружности вдоль торцевой стороны, где находится первая направляющая поверхность, а во впадине первой направляющей поверхности предоставлен первый зацепляющий компонент;
при этом вершина первой сопряженной поверхности выполнена в соответствии со впадиной первой направляющей поверхности, а впадина первой сопряженной поверхности выполнена в соответствии с вершиной первой направляющей поверхности; и
либо: а) первая направляющая поверхность имеет по меньшей мере одну вершину и по меньшей мере одну впадину, которые распределены по окружности вдоль соответствующей торцевой стороны, а на вершине первой сопряженной поверхности предусмотрен второй зацепляющий компонент, и
при этом впадина первой сопряженной поверхности выполнена так, чтобы не препятствовать зацеплению между первыми и вторыми зацепляющими компонентами, либо b) первая сопряженная поверхность дополнительно снабжена первой вмещающей канавкой на ней, причем вмещающая канавка выполнена с возможностью размещения вершины первой направляющей поверхности.
11. Передаточный узел по п. 10, в котором в а) впадина первой сопряженной поверхности выполнена таким образом, что, когда первый передаточный диск находится в зацеплении со вторым передаточным диском,
впадина первой сопряженной поверхности совсем не находится в контакте с соответствующей вершиной первой направляющей поверхности, или
впадина первой сопряженной поверхности не находится в контакте с соответствующей вершиной первой направляющей поверхности, при том что между двумя боковыми участками впадины первой сопряженной поверхности и двумя боковыми участками соответствующей вершины первой направляющей поверхности образован линейный контакт или поверхностный контакт.
12. Передаточный узел по п. 1, дополнительно содержащий третий передаточный диск, причем первый передаточный диск, второй передаточный диск и третий передаточный диск соединены последовательно;
при этом второй передаточный диск дополнительно имеет четвертый конец, противоположный третьему концу, а третий передаточный диск имеет пятый конец, расположенный торец к торцу с четвертым концом;
при этом одна из торцевой стороны четвертого конца и торцевой стороны пятого конца имеет вторую направляющую поверхность, образованную на ней, а другая из торцевой стороны четвертого конца и торцевой стороны пятого конца снабжена четвертым зацепляющим компонентом, причем по меньшей мере один третий зацепляющий компонент предоставлен на второй направляющей поверхности, и четвертый зацепляющий компонент выполнен с возможностью зацепления третьего зацепляющего компонента, и
при этом четвертый зацепляющий компонент выполнен с возможностью скольжения вдоль второй направляющей поверхности до зацепления четвертого зацепляющего компонента с третьим зацепляющим компонентом, чтобы обеспечить передачу крутящего момента между вторым передаточным диском и третьим передаточным диском.
13. Передаточный узел по п. 12, в котором первый зацепляющий компонент имеет форму и размер, идентичные третьему зацепляющему компоненту, причем второй зацепляющий компонент имеет форму и размер, идентичные четвертому зацепляющему компоненту, и при этом первая направляющая поверхность имеет форму, идентичную второй направляющей поверхности, и/или
передаточный узел содержит по меньшей мере два взаимно сцепленных вторых передаточных дисков, один из которых сцеплен с первым передаточным диском, а другой из которых сцеплен с третьим передаточным диском, и/или
четвертый зацепляющий компонент и второй зацепляющий компонент поочередно расположены вдоль направления по окружности передаточного узла.
14. Система хирургического инструмента для хирургического робота, содержащая:
коробку движущих сил, содержащую первый корпус коробки и приводной механизм, расположенный в первом корпусе коробки, причем первый корпус коробки снабжен по меньшей мере одним выходным отверстием;
хирургический инструмент, содержащий вал инструмента, инструментальный наконечник и инструментальный короб, причем инструментальный короб содержит второй корпус коробки и передаточный модуль, причем передаточный модуль расположен во втором корпусе коробки и выполнен с возможностью приведения в движение вала инструмента и/или конца инструмента, причем второй корпус коробки снабжен по меньшей мере одним входным отверстием; и
передаточный узел по п. 1,
при этом первый передаточный диск расположен в выходном отверстии, а второй передаточный диск расположен во входном отверстии, и при этом, когда первый передаточный диск сцеплен со вторым передаточным диском, движущая сила, обеспечиваемая приводным механизмом, передается передаточным узлом в передаточный модуль, который, в свою очередь, приводит в движение вал инструмента и/или инструментальный наконечник.
15. Система хирургического инструмента для хирургического робота, содержащая:
коробку движущих сил, содержащую первый корпус коробки и приводной механизм, расположенный в первом корпусе коробки, причем первый корпус коробки снабжен по меньшей мере одним выходным отверстием;
по меньшей мере одну стерильную пластину, каждая из которых снабжена по меньшей мере одним передаточным отверстием;
хирургический инструмент, содержащий вал инструмента, инструментальный наконечник и инструментальный короб, причем инструментальный короб содержит второй корпус коробки и передаточный модуль, причем передаточный модуль расположен во втором корпусе коробки и выполнен с возможностью приведения в движение вала инструмента и/или инструментального наконечника, и второй корпус коробки снабжен по меньшей мере одним входным отверстием; и
передаточный узел по п. 1, в котором:
коробка движущих сил, стерильная пластина и инструментальный короб расположены последовательно;
первый передаточный диск обеспечен в выходном отверстии и дополнительно содержит первый конец напротив второго конца, причем первый конец первого передаточного диска соединен с приводным механизмом; при этом второй передаточный диск предоставлен в передаточном отверстии, а третий передаточный диск предоставлен во входном отверстии и дополнительно содержит шестой конец напротив пятого конца, причем шестой конец третьего передаточного диска соединен с передаточным модулем; и
когда первый передаточный диск, второй передаточный диск и третий передаточный диск сцеплены последовательно, движущая сила, обеспечиваемая приводным механизмом, передается передаточным узлом в передаточный модуль, который, в свою очередь, приводит в движение вал инструмента и/или инструментальный наконечник.
16. Система хирургического инструмента по п. 15, дополнительно содержащая по меньшей мере один набор магнитов для корректировки положения, и/или по меньшей мере один набор магнитов против смещения, и
при этом третий передаточный диск имеет нулевое положение, и набор магнитов для корректировки положения выполнен с возможностью помощи в достижении третьим передаточным диском нулевого положения и при этом передаточный узел имеет ненадлежащее положение, а набор магнитов против смещения выполнен с возможностью предотвращения попадания передаточного узла в ненадлежащее положение.
17. Система хирургического инструмента по п. 16, в которой набор магнитов для корректировки положения содержит первый магнит и второй магнит, причем первый магнит расположен на третьем передаточном диске, второй магнит расположен на инструментальном коробе, первый и второй магниты выполнены с возможностью притягивания друг к другу для помощи в достижении третьим передаточным диском нулевого положения; и набор магнитов против смещения содержит третий магнит и четвертый магнит, причем третий магнит предоставлен на втором передаточном диске, четвертый магнит предоставлен на стерильной пластине, и при этом третий и четвертый магниты расположены так, чтобы отталкивать друг друга, чтобы не пускать передаточный узел в ненадлежащее положение под действием силы отталкивания.
18. Система хирургического инструмента по п. 15, дополнительно содержащая круговой ограничитель, выполненный с возможностью ограничения диапазона вращения третьего передаточного диска; и/или осевой ограничитель, выполненный с возможностью предотвращения вытеснения второго передаточного диска со стерильной пластины
19. Система хирургического инструмента по п. 18, в которой круговой ограничитель содержит ограничительный выступ, предусмотренный на круговой боковой стенке третьего передаточного диска, и канавку скольжения, предусмотренную во внутренней стенке входного отверстия, и при этом ограничительный выступ предусмотрен внутри канавки скольжения и может перемещаться вдоль канавки скольжения, и при этом
стерильная пластина содержит стерильную подложку и стерильную крышку, причем стерильная подложка соединена с коробкой движущих сил, стерильная подложка снабжена первым сквозным отверстием, стерильная крышка снабжена вторым сквозным отверстием, второе сквозное отверстие составляет передаточное отверстие вместе с первым сквозным отверстием, причем осевой ограничитель содержит ограничительный буртик, предусмотренный на круговой боковой стенке второго передаточного диска, и при этом секция второго сквозного отверстия рядом с первым сквозным отверстием имеет внутренний диаметр больше каждого из внутреннего диаметра секции второго сквозного отверстия, удаленного от первого сквозного отверстия, и внутреннего диаметра первого сквозного отверстия, и соответствует внешнему диаметру ограничительного буртика.
20. Хирургический робот, содержащий систему хирургических инструментов по п. 14 или 15.
21. Приводной узел для хирургического инструмента, содержащий:
первый корпус коробки, в котором предусмотрено по меньшей мере одно выходное отверстие;
приводной механизм, расположенный в первом корпусе коробки; и
либо i) первый передаточный диск, выполненный с возможностью зацепления со вторым передаточным диском, содержащим второй зацепляющий компонент, или с третьим передаточным диском, содержащим четвертый зацепляющий компонент, причем первый передаточный диск расположен в выходном отверстии, при этом первый передаточный диск имеет две противоположные концевые части, одна из которых соединена с приводным механизмом, другая из которых имеет направляющую поверхность, образованную на ее торцевой стороне, причем направляющая поверхность снабжена по меньшей мере одним первым зацепляющим компонентом, и направляющая поверхность выполнена с возможностью обеспечивать перемещение второго зацепляющего компонента второго передаточного диска или четвертого зацепляющего компонента третьего передаточного диска вдоль направляющей поверхности до их зацепления с первым зацепляющим компонентом, причем направляющая поверхность первого передаточного диска имеет по меньшей мере одну вершину и по меньшей мере одну впадину, которые расположены вдоль направления по окружности соответствующей концевой части, либо ii) первый передаточный диск, выполненный с возможностью зацепления со вторым передаточным диском, содержащим первую направляющую поверхность и первый зацепляющий компонент, или с третьим передаточным диском, содержащим вторую направляющую поверхность и третий зацепляющий компонент, причем первый передаточный диск расположен в выходном отверстии, при этом первый передаточный диск имеет две противоположные концевые части, одна из которых соединена с приводным механизмом, а другая из которых имеет по меньшей мере один второй зацепляющий компонент, образованный на ее торцевой стороне, причем второй зацепляющий компонент выполнен с возможностью перемещения вдоль первой направляющей поверхности до его зацепления с первым зацепляющим компонентом или с возможностью перемещения вдоль второй направляющей поверхности до его зацепления с третьим зацепляющим компонентом, причем первая сопряженная поверхность образована на торцевой стороне другой из концевых частей первого передаточного диска, и при этом первая сопряженная поверхность имеет по меньшей мере одну вершину и по меньшей мере одну впадину, которые расположены вдоль направления по окружности торцевой стороны.
22. Приводной узел по п. 21, в котором в i) во впадине направляющей поверхности предусмотрен первый зацепляющий компонент, и/или
направляющая поверхность первого передаточного диска снабжена по меньшей мере двумя первыми зацепляющими компонентами, которые расположены центрально-симметрично на направляющей поверхности; и
второй зацепляющий компонент расположен на вершине первой сопряженной поверхности.
23. Стерильный узел для хирургического инструмента, содержащий:
по меньшей мере одну стерильную пластину, снабженную по меньшей мере одним передаточным отверстием; и
по меньшей мере один второй передаточный диск, выполненный с возможностью зацепления с первым передаточным диском и третьим передаточным диском, причем второй передаточный диск расположен внутри передаточного отверстия, второй передаточный диск имеет две противоположные концевые части, а по меньшей мере одна из концевых частей снабжена направляющей поверхностью на ее торцевой стороне, при этом каждая из двух концевых частей второго передаточного диска снабжена по меньшей мере одним зацепляющим компонентом на соответствующей торцевой стороне, и при этом направляющая поверхность и зацепляющие компоненты выполнены с возможностью зацепления второго передаточного диска с каждым из первого и третьего передаточных дисков, причем направляющая поверхность второго передаточного диска имеет по меньшей мере одну вершину и по меньшей мере одну впадину, которые расположены вдоль направления по окружности соответствующей концевой части.
24. Стерильный узел по п. 23, в котором во впадине направляющей поверхности расположен зацепляющий компонент (компоненты), предусмотренный на направляющей поверхности.
25. Стерильный узел по п. 23, в котором a) каждая из двух концевых частей второго передаточного диска имеет направляющую поверхность, образованную на соответствующей торцевой стороне, а на каждой направляющей поверхности предусмотрен по меньшей мере один зацепляющий компонент, причем зацепляющий компонент представляет собой углубление, или
b) только одна из концевых частей второго передаточного диска имеет направляющую поверхность, образованную на ее торцевой стороне, а зацепляющий компонент, предусмотренный на направляющей поверхности, представляет собой углубление, и при этом зацепляющий компонент, предусмотренный на торцевой стороне другой из концевых частей, представляет собой выступ.
26. Стерильный узел по п. 23, причем в b) стерильный узел содержит по меньшей мере две стерильные пластины, уложенные вместе, а передаточные отверстия по меньшей мере в двух стерильных пластинах выровнены друг с другом, и каждое из них снабжено одним передаточным диском.
27. Стерильный узел для хирургического инструмента, содержащий:
по меньшей мере одну стерильную пластину, каждая из которых снабжена по меньшей мере одним передаточным отверстием; и
по меньшей мере один второй передаточный диск, выполненный с возможностью зацепления с первым передаточным диском, содержащим первую направляющую поверхность и первый зацепляющий компонент, и с третьим передаточным диском, содержащим вторую направляющую поверхность и третий зацепляющий компонент, причем второй передаточный диск расположен в передаточном отверстии, при этом второй передаточный диск имеет две противоположные концевые части, каждая из которых имеет по меньшей мере один зацепляющий компонент, образованный на ее торцевой стороне, причем зацепляющие компоненты выполнены с возможностью зацепления второго передаточного диска с каждым из первого и третьего передаточных дисков, причем каждая из двух противоположных концевых частей второго передаточного диска имеет сопряженную поверхность, образованную на соответствующей торцевой стороне, и сопряженная поверхность снабжена по меньшей мере одной вершиной и по меньшей мере одной впадиной, которые расположены вдоль направления по окружности соответствующей торцевой стороны.
28. Стерильный узел по п. 27, в котором каждый из зацепляющих компонентов предоставлен на вершине соответствующей сопряженной поверхности.
29. Узел инструментального короба для хирургического инструмента, содержащего вал инструмента и инструментальный наконечник, содержащий:
инструментальный короб, содержащий второй корпус коробки и передаточный модуль, расположенный во втором корпусе коробки, причем передаточный модуль выполнен с возможностью приведения в движение вала инструмента и/или инструментального наконечника, при этом второй корпус коробки имеет по меньшей мере одно обеспеченное в нем входное отверстие; и
либо i) третий передаточный диск, выполненный с возможностью зацепления с первым передаточным диском, содержащим второй зацепляющий компонент, или со вторым передаточным диском, содержащим четвертый зацепляющий компонент, причем третий передаточный диск расположен во входном отверстии, причем третий передаточный диск имеет две противоположные концевые части, одна из которых соединена с передаточным модулем, а другая из которых имеет направляющую поверхность, образованную на ее торцевой стороне, причем направляющая поверхность снабжена по меньшей мере одним третьим зацепляющим компонентом, и направляющая поверхность выполнена с возможностью перемещения второго зацепляющего компонента первого передаточного диска вдоль направляющей поверхности до его зацепления с третьим зацепляющим компонентом или с возможностью перемещения четвертого зацепляющего компонента второго передаточного диска вдоль направляющей поверхности до его зацепления с третьим зацепляющим компонентом, причем направляющая поверхность третьего передаточного диска имеет по меньшей мере одну вершину и по меньшей мере одну впадину, которые расположены вдоль направления по окружности соответствующей одной из концевых частей; либо
ii) третий передаточный диск, выполненный с возможностью зацепления с первым передаточным диском, содержащим первую направляющую поверхность и первый зацепляющий компонент, или со вторым передаточным диском, содержащим вторую направляющую поверхность и третий зацепляющий компонент, причем третий передаточный диск расположен во входном отверстии, причем третий передаточный диск имеет две противоположные концевые части, одна из которых соединена с передаточным модулем, а другая из которых имеет по меньшей мере один четвертый зацепляющий компонент, образованный на ее торцевой стороне, причем четвертый зацепляющий компонент выполнен с возможностью перемещения вдоль первой направляющей поверхности до его зацепления с первым зацепляющим компонентом первого передаточного диска или с возможностью перемещения вдоль второй направляющей поверхности до его зацепления с третьим зацепляющим компонентом второго передаточного диска, причем другая из двух противоположных концевых частей имеет первую сопряженную поверхность, образованную на ее торцевой стороне, причем первая сопряженная поверхность имеет по меньшей мере одну вершину и по меньшей мере одну впадину, которые расположены вдоль направления по окружности соответствующей торцевой стороны.
30. Узел инструментального короба по п. 29, в котором i) во впадине направляющей поверхности обеспечен третий зацепляющий компонент, и
ii) при этом на вершине первой сопряженной поверхности обеспечен четвертый зацепляющий компонент.
| CN 104706426 A, 17.06.2015 | |||
| CN 108472029 A, 31.08.2018 | |||
| WO 2018189729 A1, 18.10.2018 | |||
| US 2008140088 A1, 12.06.2008 | |||
| EP 3007638 B1, 30.05.2018 | |||
| JP 6134768 B2, 24.05.2017 | |||
| ХИРУРГИЧЕСКАЯ СИСТЕМА СО СТЕРИЛЬНОЙ ИЗОЛЯЦИЕЙ | 2014 |
|
RU2692231C2 |
| СИСТЕМА ХИРУРГИЧЕСКОГО ИНСТРУМЕНТА, ВКЛЮЧАЮЩАЯ СМЕННЫЕ КОНЦЕВЫЕ ЭФФЕКТОРЫ | 2013 |
|
RU2642947C2 |

