Изобретение относится к области военной автомобильной техники (ВАТ), и может быть использовано для автоматизации предупреждения столкновений с препятствием ВАТ во время движения в колонне при возникающей аварийной ситуации. Изобретение рассчитано прежде всего на использование современных бортовых электронных системах управления (БЭСУ), обеспечивающих оптимальную скорость и безопасность движения в колонне. Реализация предлагаемого способа возможна при разработке новых и в ходе модернизации существующих БЭСУ движением ВАТ.
В процессе боевой и повседневной деятельности образцы ВАТ перемещаются как правило в составе колонны. Передвижение ВАТ в колонне обусловлено соблюдением скоростного режима, выдерживанием установленной дистанции, обеспечением безопасности движения, как правило в условиях ограниченной видимости.
В боевой обстановке для снижения аварийности должны быть использованы все возможные технические средства и способы управления при движении в колонне. Поэтому важным является повышение подвижности и обеспечение безопасности движения ВАТ в колонне за счет улучшения способа управления автомобилями в колонне.
БЭСУ современных образцов ВАТ, как правило имеют электронные системы управления, предназначенные для контроля и диагностики узлов и агрегатов ВАТ. На сегодняшний день в составе БЭСУ ВАТ наиболее распространены электронные системы контроля: системы автоматической подкачки шин и управления впрыском топлива. Система управления БЭСУ обычно представляет собой совокупность ряда подсистем (Фиг. 1).
Вероятность рст столкновения автомобилей колонны должна стремиться к минимуму, скорость νк колонны должна стремиться к максимуму (либо к целевой скорости νц), дистанция di между соседними автомобилями (i и i+1) должна стремиться к заданному значению dц, которое обычно зависит от целевой скорости движения.
БЭСУ обеспечивает управление движением колонны ВАТ за счет автоматической корректировки скорости движения автомобилей νi, либо за счет рекомендации скорости водителю с последующей корректировкой скорости водителем. Поэтому основное действие БЭСУ сводится к определению и установлению с помощью исполнительных схем оптимальной скорости движения νi(t+Δt) автомобиля i в последующий момент времени t+Δt по отношению к текущему моменту времени t. Для определения оптимальной скорости νi(t+Δt) БЭСУ использует множество данных в момент времени t. Основными исходными данными для управления служат текущие значения скоростей и дистанции всех автомобилей колонны, то есть,

где i - индекс автомобиля, оснащенного БЭСУ; F - функция управления; j - индекс автомобиля колонны (j=1…NA), {νj(t)} - множество скоростей автомобилей колонны в текущий момент времени t; {dj(t)} - множество дистанций между автомобилями колонны.
Однако в постановке задачи (1) система управления только непосредственно реагирует на текущее состояние колонны. Новизной заявленного способа является использование нейросетевого прогнозирования состояния колонны для ее управления. Поэтому в разработанной БЭСУ к параметрам текущего состояния колонны {νj(t)}, {dj(t)} добавлены параметры прогнозируемого состояния колонны {vjп(t+Δt)},{djп(t+Δt)}:

Для определения параметров текущего состояния колонны используются общепринятые способы измерения: датчики скорости и расстояния между автомобилями. Однако для прогнозирования параметров состояния колонны через определенный момент времени Δt (от 2 до 10 и более секунд) помимо датчиков скорости и дистанции используется целый ряд дополнительных параметров, измеряемых и хранимых в БЭСУ). К таким параметрам в первую очередь относятся ускорения и углы наклона автомобилей, координаты автомобилей.
В качестве аналогов могут быть рассмотрены:
1. система для предотвращения столкновений транспортных средств в колонне (см. патент РФ №2292564 МПК G01S 13/93, опубл. 27.01.2007 г., Бюл. №27), которая позволяет повышать среднюю маршевую скорость при сохранении протяженности колонны и обеспечивать безопасность движения.
Измерение дальности осуществляется до впереди идущего автомобиля. При этом функционирование радара безопасности движения автомобильного транспорта и осуществляется через генератор непрерывных колебаний формируя непрерывные колебания радиочастоты, поступающие одновременно на модулятор, в котором формируются радиоимпульсы, усиленные в первом усилителе мощности, поступающие на сумматор, а с него через циркулятор излучаются через антенну в пространство. На первый гетеродинный вход смесителя, на второй вход которого поступает через антенну и циркулятор радиосигнал, отраженный от препятствия. При этом на вход второго усилителя мощности, выходной радиосигнал которого через сумматор, циркулятор и антенну также излучается в пространство.
Недостатками данной системы предотвращения столкновений транспортных средств в колонне являются следующее:
- отсутствие возможности прогнозирования и поддержания постоянной заданной дистанции между автомобилями в колонне с учетом состояния опорной поверхности;
- воздействие на водителя сверхвысокочастотного излучения (СВЧ) при работе радара;
- узкая диаграмма направленности антенны локатора, повышает плотность СВЧ излучения;
Все это затрудняет выдерживание дистанции и скорости ВАТ при движении в колонне.
2. способ распознавания образов (см. патент рф №2430415 МПК G06K 9/00, опубл. 27.09.2011 г., Бюл. №27) патентообладатель Государственное образовательное учреждения высшего профессионального образования «Оренбургский государственный университет», заключающийся в повышение производительности и уровня универсальности устройства за счет автоматизации процесса обучения устройства и распознавания образов при произвольном законе распределения информативных признаков. Данный способ позволяет идентифицировать состояние объектов по значениям их параметров. Способ распознавания образов за счет таймера, счетчика классов образов, счетчика адресов младших разрядов, дешифратора кода класса образа, буферного регистра, блока памяти распределений информативных признаков, блока сравнения, счетчика значений информативных признаков, элемента задержки и логического элемента.
Недостатки прототипа заключается:
- в непосредственной реакции на текущее кинематическое состояние колонны без использования методов прогнозирования кинематического состояния колонны;
- в возможности использования при движении по ровной асфальтовой дороге высокого класса, и невозможности использования в сложных дорожно-грунтовых условиях (ДГУ) с существенными неровностями опорной поверхности и с неблагоприятным дорожным покрытием;
- в необходимости применения дополнительного оборудования в виде радара и устройства его крепления на ВАТ.
Кроме этого общим недостатком для прототипа и аналога является то, что не учитываются дорожно-грунтовые условия при движении автомобиля. Так, при движении ВАТ в колонне в сложных дорожно-грунтовых условиях, на автомобиль действуют постоянно изменяющиеся силы гравитационного типа и сопротивления движению. Это приводит к тому, что автомобили движется с изменяющимся ускорением, что приводит к разности скоростей и отклонению дистанции от заданного значения.
Таким образом, задачами, на решение которых направленно заявляемое изобретение, являются:
во-первых, полная автоматизация процесса поддержания установленной скорости и заданной дистанции в зависимости от состояния опорной поверхности;
во-вторых, использование нейросетевого прогнозирования дистанции между ВАТ в колонне для повышения безопасности движения и повышения средней скорости движения колонны.
Решение указанных задач осуществляется способом нейросетевого прогнозирования БЭСУ ВАТ при движении в составе колонны, позволяющим с помощью радиальной нейронной сети и базы данных об эталонных состояниях колонны (скорости автомобилей, дистанции между автомобилями) с известными последующими состояниями колонны на основе измерения и обмена между автомобилями колонны параметров состояния колонны от подсистем навигации, измерения дистанции до впереди идущего автомобиля, измерения ускорений и уклонов, измерения скорости, оценки состояния дороги (классификатор типа дорожно-грунтовых условий (ДГУ)), базы данных о дорожном покрытии, определить наиболее вероятное состояние колонны через определенный момент времени и скорректировать состояние колонны исполнительными схемами автомобиля (управлением дроссельной заслонкой, тормозной системой, визуальной и звуковой индикацией для реагирования водителя).
Прогнозирование движения ВАТ в составе колонны с учетом состояния опорной поверхности позволит обеспечивать оптимальную скорость движения и выдерживать безопасную дистанцию между автомобилями в колонне. Соответственно, прогнозирование движения ВАТ в колонне в различных ДГУ обеспечивает повышение подвижности и обеспечение безопасности при движении ВАТ в составе колонны и выполнение первой и второй задачи.
Основным техническим результатом, обеспечиваемым приведенной совокупностью задач, является:
- повышение подвижности и обеспечение безопасности за счет рекомендуемой скорости и дистанции;
- техническое упрощение БЭСУ за счет отсутствия необходимости применения распознавания образов;
- минимизация времени на обработку поступающей информации за счет применения радиальной нейронной сети.
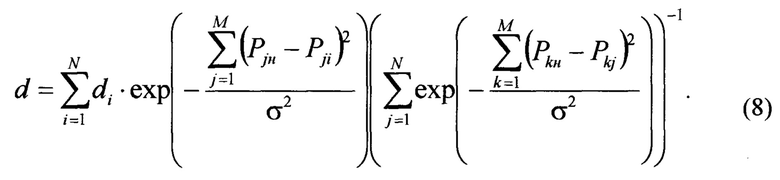
Для осуществления заявленного способа для текущей комбинации показаний датчиков и известных параметров опорной поверхности необходимо выполнить прогноз дистанции до впереди идущего автомобиля d. Для этого выбираются наиболее похожие комбинации параметров (эталоны), и усредняются с определенными весами, соответствующие им дистанции dj для получения прогноза:

где di - выходной показатель варианта-эталона из базы данных; αi(ri) - весовой коэффициент нейрона-эталона i, зависящий от расстояния ri в факторном пространстве (P1, Р2, … Pm) между данными для прогноза и i-м эталонным вариантом; N - количество вариантов (порядка 1000).
Расстояние в факторном пространстве между новым случаем (Pi, Pm) и эталонным рассчитывается по теореме Пифагора для N-измерений:

где j - номер исходного показателя эталона.
С помощью весовых коэффициентов αi учитывается, какую долю информации передают эталоны в зависимости от расстояния до пробной точки факторного пространства. Весовой коэффициент αi должен быть тем больше, чем меньше расстояние ri, а при неограниченном увеличении расстояния αi должен стремиться к нулю. Одним из наиболее удобных и математически-обоснованных является выражение для весовых коэффициентов в форме гауссовой функции:

где индекс «0» в обозначении переменной αi0 означает предварительный ненормированный вариант; σ - характерное расстояние, до которого эталоны считаются ближайшими.
Таким образом, определение весовых коэффициентов αi по данной формуле производится их нормировка, для выполнения следующего условия

Исходя из этого, нормировка коэффициентов αi0 осуществляется по формуле

Окончательное выражение для прогноза показателя d для нового набора данных можно записать следующим образом
Входными параметрами для прогнозирования являются:
- di - дистанция от автомобиля i до впереди идущего автомобиля колонны;
- axi - ускорение (в случае замедления ускорение имеет отрицательный знак) автомобиля i в продольном направлении х;
- νxi - скорость автомобиля i в направлении х;
- Lк - длина колонны, определяемая по показаниям датчиков ГЛОНАСС первого и последнего автомобилей колонны (Lк=х1-xN), принимаемым по радиосвязи каждым автомобилем колонны.
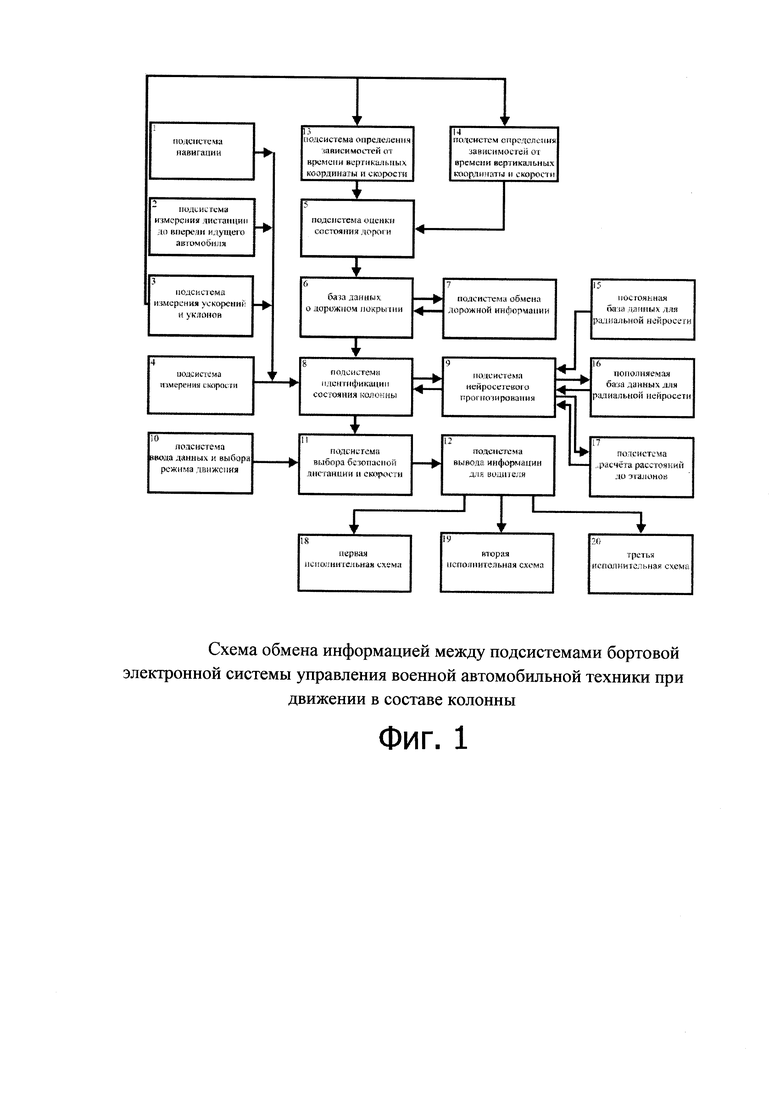
При реализации способа на основе прогнозирования движения ВАТ в составе колонны с учетом состояния ОП происходит обмен информации между компонентами БЭСУ, которая содержит (Фиг. 1): подсистему навигации 1; подсистему измерения дистанции до впереди идущего автомобиля 2; подсистему измерения ускорений и уклонов 3; подсистему измерения скорости 4; подсистему оценки состояния дороги (классификатор типа ДГУ) 5; базу данных о дорожном покрытии 6; подсистему обмена дорожной информацией 7; подсистему идентификации состояния колонны 8; подсистему нейросетевого прогнозирования 9; подсистему ввода данных и выбора режима движения 10; подсистему выбора безопасной дистанции и скорости 77; подсистему вывода информации для водителя 12; подсистемы определения зависимостей от времени вертикальных координаты и скорости 13 и 14; постоянную базу данных для радиальной нейросети 15; пополняемую базу данных для радиальной нейросети 16; подсистему расчета расстояний до эталонов 17; первую исполнительная схема (звуковой сигнал) 18; вторую исполнительная схема (управление дроссельной заслонкой) 19; третью исполнительная схема (управление тормозной системой) 20.
Заявленный способ управления движением ВАТ в составе колонны с учетом состояния ОП реализуется в следующем порядке функционирования подсистем БЭСУ: с помощью подсистемы ввода данных и выбора режима движения 10 задаются дистанция между автомобилями и целевая скорость колонны, которые в подсистеме выбора безопасной дистанции и скорости 11 сравниваются с реальными и прогнозируемыми дистанцией и скоростью. Рассчитанная БЭСУ оптимальная скорость автомобиля отображается для водителя подсистемой вывода информации для водителя 12 и одновременно подается на исполнение в подсистему исполнительных устройств 13, регулирующую подачу топлива и включающую экстренное торможение в зависимости от ситуации.
Выбор безопасной дистанции и скорости в блоке 11 осуществляется на основе данных подсистемы идентификации состояния колонны 8. Идентификация состояния колонны производится: во-первых, на основании показаний датчиков подсистемы навигации 7, измерения дистанции до впереди идущего автомобиля 2, измерения ускорений и уклонов 3, измерения скорости 4, во-вторых, базы данных о дорожном покрытии 6, в-третьих, подсистемы нейросетевого прогнозирования состояния колонны 9, которая по текущему и предыдущим состояниям колонны прогнозирует состояние колонны в будущем, через определенный интервал времени Δt.
База данных о дорожном покрытии 6 поддерживается на каждом автомобиле колонны и непрерывно пополняется; на основе результатов работы подсистемы оценки состояния дороги 5 первых автомобилей колонны становятся известны характеристики дороги для последующих автомобилей колонны. Для передачи данных между автомобилями используется подсистема обмена дорожной информацией 7.
При классификации типа дорожно-грунтовых условий в подсистеме 5 используются зависимостях от времени вертикальных координат и скорости точки размещения датчика вертикальных ускорений, которые определяются в блоках 13 и 14 соответственно путем численного интегрирования показаний датчика вертикальных ускорений 3.
Подсистема нейросетевого прогнозирования 9 использует как постоянную базу данных 15, связывающую дорожно-грунтовые условия, кинематические параметры и взаимное расположение автомобилей, так и поддерживает обмен с пополняемой базу данных 16. Постоянная база данных заполняется на этапе разработки БЭСУ, основываясь на наиболее распространенных дорожных ситуациях; пополняемая база данных непрерывно пополняется и через некоторое время после начала специфического режима движения позволяет со всей увеличивающейся точностью прогнозировать дорожную ситуацию для данного режима. Также подсистема нейросетевого прогнозирования содержит высокопроизводительный вычислительный блок 17, который собственно реализует нейросетевой расчет: прогнозирование по эталонным ситуациям методом радиальных нейронных сетей.
Подсистема вывода информации 12 в зависимости от прогнозируемой ситуации может задействовать три уровня реагирования. В безопасных ситуациях задействуется исполнительная схема 18, подающая звуковой сигнал водителю и индицирующая рекомендуемую скорость для поддержания целевых дистанций в колонне. В более опасной ситуации, помимо исполнительной схемы 18 задействуется исполнительная схема 19, управляющая дроссельной заслонкой и позволяющая путем снижения подачи топлива обеспечить режим торможения двигателем независимо от действий водителя. В случаях наиболее опасного сближения автомобилей помимо исполнительных схем 18 и 19 задействуется исполнительная схема 20 в тормозной системе, позволяющая обеспечить необходимый уровень замедления автомобиля независимо от действий водителя.
Нейронная сеть позволяет прогнозировать будущую дистанцию между автомобилями через различные промежутки времени (представляются оптимальными промежутки 10, 5 и 2 секунды).
Прогнозирование на длительный промежуток (10 секунд) позволяет БЭСУ плавно регулировать скорость автомобиля путем управления дроссельной заслонкой, с целью выдерживания заданной дистанции и скорости колонны. Прогнозирование на более короткий промежуток (5 секунд) позволяет БЭСУ реагировать на ситуации интенсивного сближения автомобилей при движении в колонне путем автоматического ограничения подачи топлива, визуального и звукового оповещения водителя. Прогнозирование на короткий промежуток времени (2 секунды), позволяет БЭСУ автоматически реагировать на экстренные ситуации: как отключать подачу топлива, так и использовать тормозную систему для планового или экстренного торможения.
Нейронная сеть производит прогнозирование на основе множества входных параметров (от 2 до порядка 102). На этапе настройки (обучения) нейронной сети определяются весовые коэффициенты входных параметров. Наиболее важными являются следующие параметры: текущая дистанция до впереди идущего автомобиля, скорость автомобиля, расстояние между первым и последним автомобилями колонны, перепад высот между данным автомобилем и впереди идущим. Менее важными являются параметры рельефа опорной поверхности, дистанции между другими автомобилями колонны, не находящимися непосредственно перед автомобилем, оснащенным БЭСУ и т.п.
Радиальная нейронная сеть, согласно своего принципа действия, определяет расстояния («радиусы») в многофакторном пространстве входных параметров от текущей ситуации до каждой эталонной ситуации с известными дистанциями через набор промежутков времени (10, 5, 2 секунды). Запоминание множества эталонов производится как на предварительном этапе обучения нейронной сети (на основе эксперимента по движению колонны или компьютерного моделирования). Так и на этапе движения ВАТ в колонне, к множеству эталонов добавляются «текущее» подмножество эталонов, которые фиксируются в процессе движения колонны по текущим дорожно-грунтовым условиям. Чтобы прогноз учитывал, как постоянно хранимые в памяти эталоны, так и непрерывно обновляющиеся эталоны, производится усреднение с определенными весовыми коэффициентами (в частности, одинаковыми и равными 0,5) результатов прогнозирования дистанции до впереди идущего автомобиля.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления движением автомобильной техники в составе колонны с учетом состояния опорной поверхности, рельефа и кривизны маршрута | 2022 |
|
RU2790889C1 |
| СИСТЕМА АКТИВНОЙ БЕЗОПАСНОСТИ ТРАНСПОРТНОГО СРЕДСТВА | 2023 |
|
RU2815561C1 |
| Способ определения эксплуатационных параметров автомобиля, фиксируемых при движении в колонне | 2023 |
|
RU2810707C1 |
| Способ предотвращения столкновения транспортных средств | 2015 |
|
RU2616114C1 |
| СПОСОБ ДИАГНОСТИРОВАНИЯ ИНФОРМАЦИОННО-ПРЕОБРАЗУЮЩИХ ЭЛЕМЕНТОВ БОРТОВОГО ОБОРУДОВАНИЯ ВОЗДУШНОГО СУДНА НА ОСНОВЕ МАШИННОГО ОБУЧЕНИЯ | 2022 |
|
RU2802976C1 |
| НЕЙРОСЕТЕВОЙ РЕГУЛЯТОР ДЛЯ УПРАВЛЕНИЯ КУРСОМ СУДНА | 2007 |
|
RU2359308C2 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ТОРМОЗНОГО ПУТИ ТРАНСПОРТНОГО СРЕДСТВА | 2012 |
|
RU2534689C2 |
| Способ помощи водителю наземного транспортного средства при обгоне | 2023 |
|
RU2831037C1 |
| Устройство для информирования водителя автомобиля об условиях обгона | 2021 |
|
RU2755645C1 |
| Диагностический ремонтный комплекс для обслуживания специального железнодорожного подвижного состава | 2023 |
|
RU2808141C1 |
Изобретение относится к автомобильной технике. В способе управления движением военной автомобильной техники в составе колонны с учетом неровностей и реологического состояния опорной поверхности управляют исполнительными схемами автомобильной техники и индикацией для реагирования водителем по критерию выдерживания постоянного расстояния между техникой в составе колонны. Также прогнозируют наиболее вероятное состояние колонны через определенный интервал времени с помощью искусственной радиальной нейронной сети и базы данных о предыдущих и последующих состояниях колонны на основе регулярного измерения исходных данных для прогнозирования. Такими данными являются: координаты от подсистемы навигации, дистанция до впереди идущего автомобиля, скорость автомобиля, ускорения и наклоны автомобиля, параметры рельефа и реологического состояния опорной поверхности. Автоматизируется управление движением. 1 ил.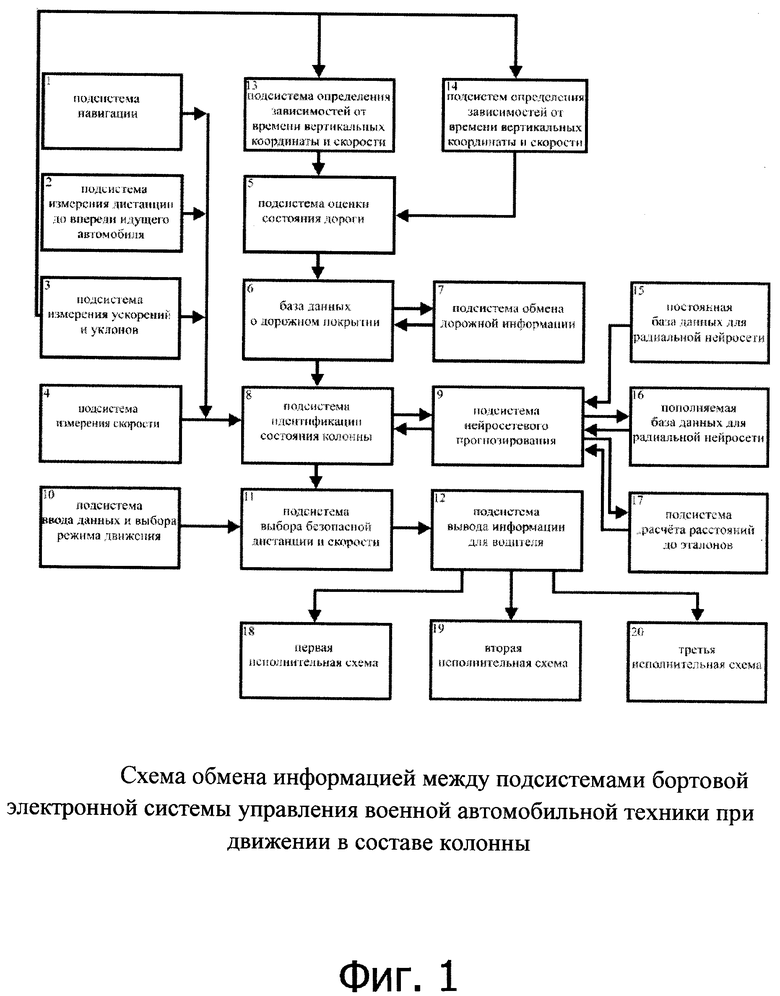
Способ управления движением военной автомобильной техники (ВАТ) в составе колонны с учетом неровностей и реологического состояния опорной поверхности, заключающийся в управлении исполнительными схемами ВАТ и индикацией для реагирования водителем по критерию выдерживания постоянного расстояния между ВАТ в составе колонны, отличающийся прогнозированием наиболее вероятного состояния колонны через определенный интервал времени с помощью искусственной радиальной нейронной сети и базы данных о предыдущих и последующих состояниях колонны на основе регулярного измерения исходных данных для прогнозирования: координат от подсистемы навигации, дистанции до впереди идущего автомобиля, скорости автомобиля, компонентов ускорений и наклонов автомобиля, параметров рельефа и реологического состояния опорной поверхности.
| СИСТЕМА ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЙ ТРАНСПОРТНЫХ СРЕДСТВ В КОЛОННЕ | 2004 |
|
RU2292564C2 |
| 0 |
|
SU158143A1 | |
| US 9494944 В2, 15.11.2016 | |||
| WO 2018043753 А1, 08.03.2018 | |||
| Способ прогностического иерархического управления интеллектуальной транспортной системой при управлении движением колонны на территориях с холодным климатом | 2018 |
|
RU2690143C1 |

