Область техники
Предлагаемое изобретение относится к вспомогательному оборудованию для пассажирских и грузовых транспортных систем, а именно к бортовой, обеспечивающей безопасность, контрольно-измерительной технике, обрабатывающей информацию различных категорий, подразделяющихся на массив данных получаемых в режиме реального времени (внешние признаки водителя, акустические признаки) и на массив данных, касающихся установленного транспортными структурами регламента работы водителя (показатели движения, режимы труда и отдыха).
Уровень техники
Из уровня техники известно устройство для предотвращения сна водителя за рулем (см. RU 2413633, кл. B60K 28/06, публ. 10.03.2011 г. [1]).
Известное техническое решение [1] относится к системам обеспечения безопасности управления транспортным средством и предназначается для предупреждения водителя транспортного средства об опасном развитии усталости и засыпании за рулем.
В составе рассматриваемого устройства безопасности содержится видеокамера, постоянно направленная на лицо водителя т/с, электронно-вычислительное устройство в виде микропроцессора, выполненного с возможностью регистрации видеоизображения лица водителя и анализа его манеры управления т/с, модуль памяти и система предупреждения водителя т/с об опасности появления усталости и высокой вероятности засыпания за рулем, при этом микропроцессор выполнен с возможностью сравнения записанных заранее в указанный модуль памяти признаков усталости и засыпания водителя т/с с видеоизображением лица водителя во время движения т/с, активируя в случае установленной необходимости указанную систему предупреждения.
Особенностью известного устройства [1], согласно замыслу автора, является то, что записанные заранее в систему признаки опасного состояния водителя представляют из себя имитацию водителем своих индивидуальных признаков усталости и засыпания.
Согласно описанию, рассматриваемое решение [1] обеспечивает повышение безопасности управления т/с.
Однако у известного решения следует отметить, следующие недостатки.
В первую очередь необходимо указать, что в систему, предназначенную для повышения безопасности движения, загружается ограниченный набор информационных признаков водителя т/с, которые указывают исключительно на возможное уставание (неконтролируемая и контролируемая усталость) и сонное состояние (вероятное засыпание и сон как таковой), при этом возможные другие виды отвлечения водителя от дороги, такие как активное пользованием смартфоном, невнимательное слежение за дорожной обстановкой, повышенное нервное возбуждение, агрессивное вождение и употребление пищи в дороге - вероятно не будут подвержены анализу и не идентифицируются как признаки опасности, способные привести к возникновению аварийной ситуации, в связи с чем показатели безопасности могут быть условными и неполными, т.е. без учета иных факторов заметно ухудшающих качество вождения.
Дополнительно следует учесть, что известная система безопасности не является адаптированной или централизованно внедряемой и собственно предназначена преимущественно для частного (личного) использования, режимы работы которого доступны для регулировки пользователем по своему усмотрению с возможностью полного или частичного включения/отключения функционала в любой момент времени, что в свою очередь может быть воспринято водителем как необязательная к соблюдению формальность/условность, неспособная стимулировать водителя к спокойной и безопасной езде.
Из уровня техники известна технология видеоконтроля состояния водителя и транспортного средства в режиме реального времени (см. RU2684484, кл. G08B21/06, публ. 09.04.2019г. [2]).
Известное решение [2] относится к области обработки цифровых данных, а именно к когнитивной системе видеоанализа и контроля состояния водителя и транспортного средства.
Согласно рассматриваемой известной технологии реализуется компьютерный способ видеоанализа и мониторинга событий, происходящих в салоне транспортного средства в режиме реального времени, который характеризуется получением данных изображения водителя с видеокамеры, установленной в салоне т/с, выделением из полученных данных одного изображения, содержащего отображение лица водителя, выполнением переработки изображения, определением ключевых точек на изображении, определением области обработки/анализа, формированием данных, содержащих информацию о выявленном нарушении состояния водителя, а также осуществлением передачи информации о нарушении (опасное состояние водителя) на внешнюю управляющую серверную часть.
Техническая особенность известной технологии заключается в анализе обработки полученных изображений, производимых посредством предиктора на предмет наличия возможного типа несоответствия из заданного и сохраненного заранее набора несоответствий на изображениях.
Данная технология позволяет в режиме реального времени осуществлять автоматизированный мониторинг состояния водителя и т/с, выявляя быстро и с высокой точностью возможные несоответствия (опасные состояния водителя, т/с), определяя/прогнозируя впоследствии операторами транспортного предприятия соответствующие риски продолжения транспортировки и целесообразность дальнейшего управления водителем т/с.
Из недостатков следует отметить, следующие.
Известная технология предусматривает выявление и анализ широкого ряда инцидентов, т.е. согласно замыслу опасных для движения состояний водителя т/с (зевание, курение, разговор по телефону, препятствование работы системы и др.), причем анализ производится вычислительной машиной с использованием предиктивной модели, обученной с помощью нейросети на определенных тестовых выборках, что в свою очередь обеспечивает качественное улучшение результатов анализа соответствия признаков изображений признакам прецедентов (опасных состояний), но вместе с тем, ввиду сложности архитектуры нейросети и необходимости комплексного анализа обстановки внутри салона, а также за его пределами, могут наблюдаться значительные программные задержи при выявлении факта события, что может снижать оперативность выявления потенциальных аварийных и/или нештатных ситуаций.
Следует также отметить, что специфика использования вычислительным устройством индивидуально разработанной под конкретные транспортные задачи (определение, в частности, опасных/нежелательных состояний водителя) когнитивной системы анализа и обработки данных с целью получения высокопроизводительных предиктивных моделей (множество предварительно обученных предикторов в виде нейросетевых моделей) придает сомнения в технической возможности проведения своевременного и качественного обновления используемых программных компонентов, в связи с чем могут наблюдаться сложности настройки программных приложений при удаленной работе сервисной поддержки в режиме реального времени, что не позволит аппаратному оборудованию и программным средствам своевременно совершенствоваться, а также быстро и технологично адаптироваться в условиях работы с постоянно изменяющимися дорожными и погодными условиями.
Наиболее близким в отношении технической сущности к заявляемому объекту следует считать систему обеспечения безопасности, включающую в себя возможность прогнозирования усталости водителя (см. RU2561657, кл. B60W60/08, публ. 27.08.2015г. [3]).
Известная система обеспечения безопасности [3] устанавливается на транспортном средстве и технически адаптирована для оценки текущей и будущей степени усталости водителя (прогнозирование усталости), также система используется для регулировки вспомогательных систем в транспортном средстве, имея возможность передачи зафиксированной информации, например, в центр управления движением транспорта.
Известная система безопасности (контроля усталости водителя), устанавливаемая на транспортном средстве, содержит тахограф, который имеет возможность генерации сигнала, содержащего информацию о текущем времени и о интервалах времени движения транспортного средства, систему безопасности, включающую блок управления и блок моделирования внимательности, которые приспособлены вычислять текущее значение усталости водителя (вычислительный модуль) и систему помощи водителя (система предупреждения), в которую направляются управляющие сигналы на основании определенных значений усталости.
Известное средство безопасности [3], устанавливаемое на маршрутном/коммерческом транспорте, согласно описанию, возможно использовать с целью обеспечения учета различных режимов активности и отдыха водителей, что обеспечит высокий уровень безопасности перевозок.
Рассматриваемая установка [3] не лишена некоторых недостатков, указанных ниже.
Оценка факторов усталости водителя транспортного средства проходит в аналитическом режиме, причем для получения полноценных показаний и соответственно наилучшего относительно достоверного прогноза усталости следует, согласно замыслу автора, регистрировать с последующей обработкой множество эксплуатационных статистических событий, основными из которых могут быть ритм вождения водителя, время движения/время отдыха), время суток, время и периоды функционирования систем безопасности т/с (ABS, система контроля полосы, система экстренного торможения, система контроля дистанции и мн. др.), а также данные о пользовании системой охлаждения, акустической системой и другими возможными вспомогательными устройствами работа, которых регистрируется и сохраняется в блоке хранения информации. Использование множества указанных регистрируемых данных свидетельствует о качественном сборе информации и аналитической выработке наиболее вероятных сценариев развития усталости с прогнозной оценкой наивысшей вероятности пиковых периодов усталости, в пределах которых вождение т/с нежелательно/невозможно, вместе с тем, подбор и обработка перечисленных статистических данных требует определенного времени для тестирования водителей, причем для исключения искажения исследований желательно, чтобы водители не меняли т/с, а использовали одну и туже машину, в этой связи рассматриваемая система безопасности не способна точно определять опасности в режиме реального времени если т/c управляет новый не прошедший тестовую подготовку водитель, а также если прошедший подготовку водитель пересел на новое неисследованное т/с.
Также рассматриваемое средство безопасности [3] может находиться в непосредственном взаимодействии практически со всеми действующими и перспективными системами активной и пассивной безопасности т/с, а также с иными вспомогательными системами т/с, предназначенными, в частности, для улучшения эргономики и уровня комфорта, что характеризует систему как универсальную и высокотехнологичную, обладающую потенциалом для усовершенствования компонентов и режимов эксплуатации, однако, для поддержания высокого качества работы и сохранения относительной стабильности прогнозирования дорожных процессов будут требоваться регулярные трудоемкие и энергозатратные сервисные мероприятия, обусловленные постоянным внедрением новых и существенно обновленных автомобильных систем, интеграция которых сопряжена с перенастройками рабочих частей и узловых компонентов всего т/c.
Раскрытие изобретения
Технической проблемой предлагаемого изобретения является создание комбинированной регистрационно-предупреждающей системы слежения, позволяющей поддерживать относительную безопасность перемещения, контролируемого управляющими службами пассажирского и грузового транспорта.
Техническим результатом предлагаемого изобретения является реализация указанного назначения по созданию контролируемого внешними структурами управления регистрационно-предупреждающего комплекса, устанавливаемого на транспортном средстве с целью оперативной возможности предупреждения возникновения аварийных ситуаций, и повышения точности выявления признаков, свидетельствующих о предельно допустимом времени пребывания за рулем транспортного средства.
Указанный технический результат, решающий обозначенную техническую проблему достигается в результате того, что система активной безопасности транспортного средства c контролируемым эксплуатационным режимом содержит обоюдно соединенные между собой посредством проводных и/или беспроводных интерфейсов центральную контрольно-измерительную подсистему и вспомогательную контрольно-вычислительную подсистему, образующие объединенный регистрационно-исследовательский дорожный блок, поддерживающий связь с внешней контролирующей эксплуатационный режим транспортного средства структурой, при этом центральная контрольно-измерительная подсистема имеет возможность регистрации скорости и режимов труда/отдыха водителя транспортного средства, а также передачи на сервер упомянутой внешней контролирующей структуры соответствующих или несоответствующих условиям относительно безопасного режима вождения оперативных данных, получаемых в результате сопоставления влияющих на усталость нормированных значений с обработанными фактическими, позволяющими определять усталость видеоданными облика водителя, получаемыми в режиме реального времени цифровым устройством видеонаблюдения, предварительно передающим их в упомянутую вспомогательную контрольно-вычислительную подсистему, выполненную в виде модуля обработки видеоданных и принятия решений, который в случае выявления признаков невнимательности и/или усталости водителя транспортного средства формирует предупредительный командный сигнал, поступающий в исполнительную подсистему предупреждения, оснащенную звуковоспроизводящими и/или светоиспускающими средствами.
Предлагается вниманию универсального строения дорожный контролируемый внешними системами контрольно-измерительный программно-аппаратный комплекс комбинационного строения, подразумевающего использование совмещенного между собой контрольно-регистрационного и предупреждающего вычислительного оборудования, содержащего средства видеоконтроля и предупреждения об опасности, что позволяет в режиме реального времени постоянно следить в удаленном режиме за состоянием водителя, а кроме того точно определять ситуации предельно возможного времени управления транспортного средства в относительно стабильном и безопасном режиме, не провоцирующем возникновение аварийных ситуаций со стороны водителя.
Основу изобретательского замысла составляет структура используемого объединенного регистрационно-исследовательского дорожного блока выполненного составным, который включает центральную контрольно-измерительную подсистему и вспомогательную контрольно-вычислительную подсистему обоюдно соединенные между собой посредством проводных или беспроводных интерфейсов, что позволяет использовав нормативные показатели деятельности водителя, технические показатели транспортного средства в режиме вождения и покоя, а также прошедшие обработку и контроль признаки внешнего вида водителя проводить исследовательский анализ и как результат наиболее точно и достоверно, учитывая перечисленные признаки/показатели, определять степень усталости конкретного водителя и только с учетом фактических выявленных в режиме реального времени признаков делать состоятельные полноценные выводы о возможности или невозможности дальнейшего управления транспортного средства именно этим водителем, что в целом способно повышать эффективность работы транспортных предприятий и не останавливать работу коммерческих транспортных средств без видимых на то оснований.
В эксплуатационном отношении следует отметить, что центральная контрольно-измерительная подсистема, регистрирующая скорость и признаки деятельности водителя имеет возможность передачи в управляющую внешнюю дорожную структуру оперативных данных, получаемых в результате сопоставления влияющих на усталость водителя нормированных значений его деятельности с фактическими, позволяющими определять усталость водителя видеоданными его облика, получаемыми в режиме реального времени и передающимися изначально для предварительной обработки в контрольно-вычислительную подсистему, исполненную в виде модуля обработки и принятия решений, что по существу, в соответствии с замыслом, на первом этапе обеспечивает автоматизированную проверку поступивших данных на предмет усталости или отвлечения водителя, а на втором этапе обеспечивает уже комплексную детальную проверку поступивших данных, которые сопоставляются в последствии с установленными/нормированными значениями деятельности, определяя тем самым своевременные решения о возможности или невозможности продолжения управления водителем транспортного средства, что безусловно оптимизирует показатели эффективности и безопасности работы транспортного предприятия, рационализируя, в частности, эксплуатационную нагрузку и снижая при этом угрозу возникновения аварийных ситуаций.
Также следует отметить, что модуль обработки и принятия решений в случае выявления признаков, несоответствующих требованиям безопасности, направляет предупредительный командный сигнал в подсистему предупреждения, оповещающую водителя звуком или светом о необходимости обратить внимание на дорожную обстановку, повысить как следствие внимание и снизить тем самым вероятность возможного неблагоприятного развития дорожной ситуации во время движения транспортного средства.
Таким образом, предлагаемая система активной безопасности транспортного средства с контролируемым эксплуатационным режимом, образует совокупность признаков, достаточных для достижения заданного технического результата, заключающегося в создании контролируемого внешними структурами управления регистрационно-предупреждающего комплекса, устанавливаемого на транспортном средстве с целью оперативной возможности предупреждения возникновения аварийных ситуаций, и повышения точности выявления признаков, свидетельствующих о предельно допустимом времени пребывания за рулем транспортного средства, а также для решения существующей технической проблемы собственно по получению комбинированной регистрационно-предупреждающей системы слежения, позволяющей поддерживать относительную безопасность перемещения, контролируемого управляющими службами пассажирского и грузового транспорта.
Краткое описание чертежей
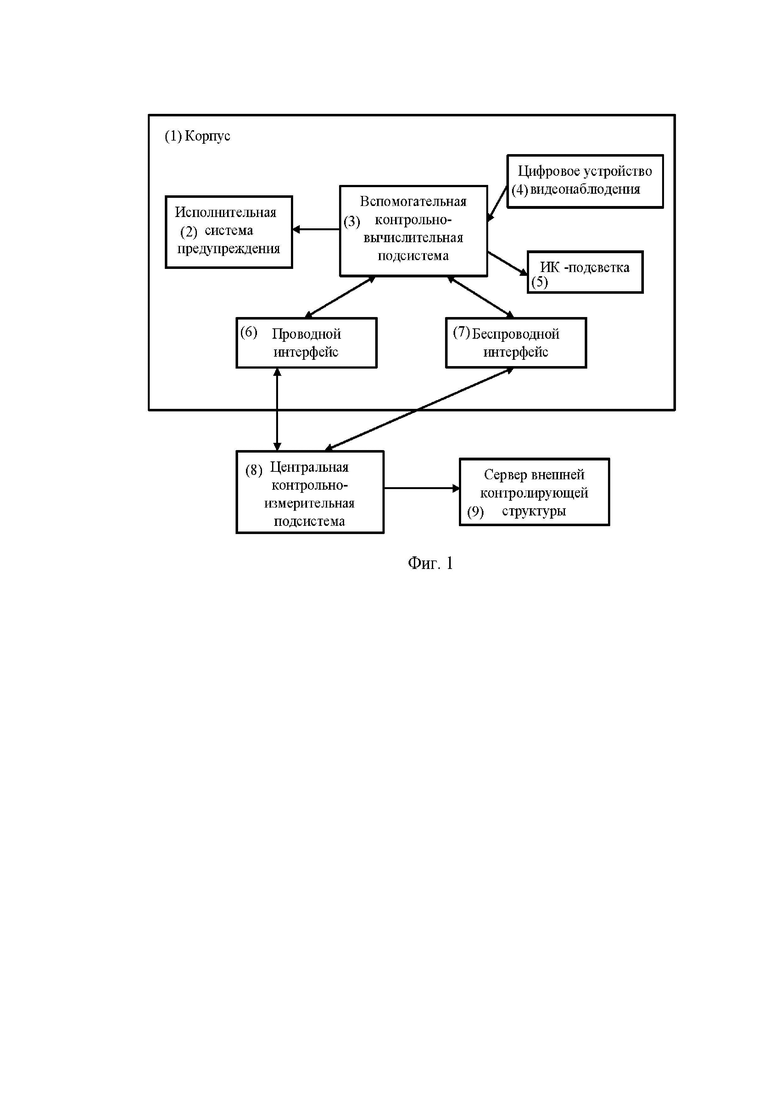
На фиг. 1 представлена структурная схема предлагаемой системы активной безопасности транспортного средства;
На фиг. 2 представлен алгоритм работы объединенного регистрационно-исследовательского дорожного блока.
Осуществление изобретения
Предлагаемая система активной безопасности транспортного средства поясняется конкретными примерами выполнения и реализации, которые, однако, не являются единственно возможными, но наглядным образом демонстрируют достижение указанной совокупностью существенных признаков заданного технического результата, а также решение указанной технической проблемы.
При этом на фиг. 1 схематично обозначены, следующие части и компоненты предлагаемой системы активной безопасности транспортного средства:
1 - корпус;
2 - исполнительная система предупреждения;
3 - вспомогательная контрольно-вычислительная подсистема;
4 - цифровое устройство видеонаблюдения;
5 - ИК-подсветка;
6 - проводной интерфейс;
7 - беспроводной интерфейс;
8 - центральная контрольно-измерительная подсистема;
9 - сервер внешней контролирующей структуры.
И так, предлагаемая система активной безопасности транспортного средства с контролируемым эксплуатационным режимом содержит обоюдно соединенные между собой посредством проводных и/или беспроводных интерфейсов (6, 7) центральную контрольно-измерительную подсистему 8 и вспомогательную контрольно-вычислительную подсистему 3.
Указанные центральная и вспомогательная подсистемы (8, 3) образуют объединенный регистрационно-исследовательский дорожный блок, поддерживающий связь с внешней контролирующей эксплуатационный режим транспортного средства структурой 9.
Центральная контрольно-измерительная подсистема 8 технически адаптирована для взаимодействия с внешними устройствами и системами и имеет соответствующие интерфейсы подключения, взаимодействующего с ним оборудования.
В соответствии с изобретательским замыслом контрольно-измерительная подсистема 8 в обозначенном исполнении имеет возможность регистрации скорости и режимов труда/отдыха водителя транспортного средства, а также передачи на сервер внешней контролирующей структуры 9 соответствующих или несоответствующих условиям относительно безопасного режима вождения оперативных данных, получаемых в результате сопоставления влияющих на усталость водителя нормированных значений его деятельности с обработанными фактическими, позволяющими определять усталость водителя видеоданными его облика, получаемыми в режиме реального времени цифровым устройством видеонаблюдения 4, предварительно передающим их в указанную выше вспомогательную контрольно-вычислительную подсистему 3.
Упомянутая вспомогательная контрольно-вычислительная подсистема 3 выполнена в виде модуля обработки видеоданных и принятия решений, который в ситуации выявления признаков невнимательности и/или усталости водителя транспортного средства формирует предупредительный командный сигнал, поступающий в исполнительную подсистему предупреждения 2, оснащенную звуковоспроизводящими и/или светоиспускающими средствами.
Следует отметить, что указанные цифровое устройство видеонаблюдения 4, вспомогательная контрольно-вычислительная подсистема 3 с проводным и беспроводным интерфейсами (6, 7), а также исполнительная система предупреждения 2 могут быть оборудованы в едином корпусе 1 или раздельно.
В качестве дополнительной возможности к вспомогательной контрольно-вычислительной подсистеме может быть подключена ИК- подсветка 5 (инфракрасная подсветка), которая срабатывает автоматически в темное время суток.
Осуществляется предлагаемая система активной безопасности транспортного средства с контролируемым эксплуатационным режимом, следующим образом.
Цифровое устройство видеонаблюдения 4, выполненное в виде цифровой видеокамеры, установлено в корпусе 1 так, чтобы облик водителя транспортного средства просматривался максимально доступно информативно.
Видеоданные получаемые от цифрового устройства видеонаблюдения 4 изначально направляются во вспомогательную контрольно-вычислительную подсистему 3, которая структурно выполнена в виде модуля обработки и принятия решений. В результате обработки поступающих непрерывно видеоданных указанный модуль обработки и принятия решений выделяет, в частности, такие состояния водителя, как сон, микросон, зевание, отвлечение от дороги, не пристегнутый ремень безопасности, разговор по телефону, агрессивное вождение.
По выделенным указанным состояниям модулем обработки и принятия решений принимается предварительное решение о возможности продолжить управление транспортным средством или о целесообразности прекратить управление.
Алгоритм определения состояния водителя в режиме реального времени определяется, как указано, модулем обработки и принятия решений, т.е. вспомогательной контрольно-вычислительной подсистемой 3, причем алгоритм работы включает, следующие операции и последовательности действий:
1. Вначале визуальные данные поступают от цифрового устройства видеонаблюдения 4 в модуль обработки и принятия решений;
2. Цветовые видеоданные в ходе проверки и обработки преобразуются в градацию серого цвета;
3. Разрешение обрабатываемых изображений водителя для цели буферизации снижается, причем для нее, как правило, используются изображения низкого разрешения (x/4, y/4);
4. Далее производится выделение наиболее контрастных контуров объектов с помощью преобразования Хафа. Растр преобразовывается в карту векторов контраста по производной изменения яркости пикселей и по нормалям к векторам с наибольшей скалярной величиной выделяются линии Хафа;
5. Используемая глубина буфера - 10 секунд, по буферу выявляются шумы, объекты, не имеющие отношение к водителю и эти объекты не используются при анализе изображений (люди в автобусе, освещенный фонарем объект/неосвещенный фонарем объект, элементы интерьера салона транспортного средства и др.);
6. По картине линий Хафа, в зависимости от расположения и статичности определяется наиболее подходящий под критерии водителя объект;
7. Нейронная сеть выделяет лицо водителя в пределах определенной заблаговременной области, определяет наличие на лице водителя солнцезащитных очков, головного убора, также определяется состояния курения, разговора по телефону, не пристегнутого ремня безопасности и пр.;
8. Изображение лица водителя нормализуется, т.е. на основе буферизированных данных устанавливается его основные параметры при взгляде в сторону направления движения и открытых глазах;
9. В случае если лицо водителя транспортного средства не соответствует лицу человека при вождении, то определяется, что водитель отвлекся от управления транспортным средством (закрыл лицо руками/головным убором, наклонился, не смотри на дорогу и т.п.);
10. Следующим этапом модулем обработки и принятия решений выделяются следующие типовые состояния лица водителя транспортного средства: “нормальное”, “еда/курение”, “поворот”;
11. При относительно “нормальном” состоянии лица далее модулем определяется положение/состояние глаз (состояние глаз может быть “открыто”, “закрыто”);
12. Если определяется, что глаза находятся в положении “открыто”, то по линиям Хафа определяется расположение зрачка, а также степень открытости глаз;
13. По положению глаз и границам области лица вычисляется положение головы водителя, т.е. как минимум наклон и степень открытости рта;
14. Далее зафиксированные положение зрачков, степень открытости глаз, степень открытости рта, а также угол поворота головы буферизируются;
15. При определении состояния лица водителя, как “не нормальное” в течении трех секунд, считается, что водитель отвлекся (определяется состояние “ ПРЕДУПРЕЖДЕНИЕ” и сигнал поступает в исполнительную систему предупреждения 2);
16. При частом закрытии глаз, считается, что водитель устал (определяется состояние “ТРЕВОГА” и сигнал поступает в исполнительную систему предупреждения 2);
17. При частом зевании считается, что водитель устал (определяется состояние “ТРЕВОГА” и сигнал поступает в исполнительную систему предупреждения 2);
18. При закрытии двух глаз на 500 мс считается, что водитель расположен к усталости (определяется состояние “ТРЕВОГА” и сигнал поступает в исполнительную систему предупреждения 2); лучше пояснить, чем состояние предупреждение отличается от состояния тревога.
20. При определении модулем обработки и принятия решений на изображении только одного глаза или если определяется, что один глаз в состоянии “закрыт” дольше, чем 3 секунды, то считается, что водитель устал (определяется состояние “ПРЕДУПРЕЖДЕНИЕ” и сигнал поступает в исполнительную систему предупреждения 2);
21. При редком перемещении зрачков водителя считается, что водитель близок к усталости (определяется состояние “ПРЕДУПРЕЖДЕНИЕ” и сигнал поступает в исполнительную систему предупреждения 2). Если же такое состояние повторяется несколько раз в течении минуты или длится более 10 с, то считается, что водитель транспортного средства устал (определяется состояние “ТРЕВОГА” и сигнал поступает в исполнительную систему предупреждения 2);
22. В случае если нейронная сеть на лице водителя определила наличие солнцезащитных очков или головного убора, мешающих анализу изображения частей лица водителя, то модуль обработки и принятия решения продолжает анализ степени наклона и поворота головы, а также зевание. В случае если модуль определил, что текущее состояние суток ночь, то считаем, что водитель устал (определяется состояние “ПРЕДУПРЕЖДЕНИЕ” и сигнал поступает в исполнительную систему предупреждения 2);
23. При сильном наклоне головы вперед (взгляд вниз) или в сторону плеча в течении трех секунд, считается, что водитель устал (определяется состояние “ПРЕДУПРЕЖДЕНИЕ” и сигнал поступает в исполнительную систему предупреждения 2);
24. При разговоре по телефону считается, что водитель отвлекается от вождения и нарушает ПДД (определяется состояние “ПРЕДУПРЕЖДЕНИЕ” и сигнал поступает в исполнительную систему предупреждения 2);
25. В случае если водитель не пристегнул ремень безопасности, то считается, что водитель нарушает правила ПДД (определяется состояние “ПРЕДУПРЕЖДЕНИЕ” и сигнал поступает в исполнительную систему предупреждения 2).
На фиг. 2 схематично в виде блок-схемы обозначены процессы и алгоритмы работы вспомогательной контрольно-вычислительной подсистемы 3.
Исполнительная система предупреждения 2 выполнена в виде комбинации светового и звукового элементов. Что позволяет отобразить следующие состояния:
- ПРЕДУПРЕЖДЕНИЕ это кратковременный звуковой сигнал повторяющийся раз в 5 секунд и редкое мигание синего светодиода.
-ТРЕВОГА это длительный не прекращающийся до остановки автомобиля звуковой сигнал и мигание красного светодиода.
Данные о принимаемых вспомогательной контрольно-вычислительной подсистемой 3 предварительных решениях о возможности или невозможности продолжать управление транспортным средством передаются с помощью проводных или беспроводных интерфейсов (6, 7) в центральную контрольно-измерительную подсистему 8.
Центральная контрольно-измерительная подсистема 8 в исполнении является тахографом транспортного средства и имеет возможность регистрации эксплуатационных параметров транспортного средства, а также режимов труда/водителя и в этой связи указанной подсистемой 8 в ее компьютерном блоке обработки информации производится сопоставление, в частности, влияющих на усталость водителя нормированных значений его деятельности с полученными от контрольно-вычислительной подсистемы 3 обработанными заранее данными физического состояния водителя, после чего сопоставленные данные, преобразуемые таким образом в оперативные, т.е. соответствующие или несоответствующие условиям относительно безопасного режима вождения. При определении несоответствия безопасному режиму вождения принимается решение о необходимости немедленного прекращения вождения и остановки транспортного средства в целях безопасности. Также данные направляются на сервер внешней контролирующей структуры 9, где может приниматься решение о целесообразности продления предельно допустимого нормативного времени пребывания водителя за рулем или немедленного прекращения вождения и остановки транспортного средства в целях безопасности.
Определенная информация о возможности или невозможности управления конкретным водителем транспортного средства может быть сохранена также на карте памяти водителя, которая устанавливается в центральной контрольно-измерительной подсистеме 8.
На основании изложенного следует подчеркнуть, что основу замысла составляет именно структура используемого объединительного регистрационно-исследовательского дорожного блока, который собственно включает центральную контрольно-измерительную подсистему 8 и вспомогательную контрольно-вычислительную подсистему 3, обоюдно соединенные между собой интерфейсами (6, 7), что позволяет использовав нормативные показатели деятельности водителя, технические показатели транспортного средства в режиме вождения и покоя, а также прошедшие обработку и контроль признаки внешнего вида водителя проводить исследовательский анализ и как результат наиболее точно и достоверно, учитывая перечисленные признаки/показатели, определять степень усталости конкретного водителя и только с учетом фактических выявленных в режиме реального времени признаков делать состоятельные полноценные выводы о возможности или невозможности дальнейшего управления транспортного средства именно этим водителем, что в целом способно повышать эффективность работы транспортных предприятий и не останавливать работу коммерческих транспортных средств без видимых на то оснований.
С точки зрения эксплуатации предлагаемой системы активной безопасности следует дополнительно подчеркнуть, что центральная контрольно-измерительная подсистема 8, регистрирующая скорость и признаки деятельности водителя имеет возможность передачи на сервер внешней структуры 9 определенных оперативных данных, получаемых в результате сопоставления влияющих на усталость водителя нормированных значений его деятельности с фактическими, позволяющими определять усталость водителя видеоданными его облика, получаемыми в режиме реального времени и передающимися изначально для предварительной обработки во вспомогательную контрольно-вычислительную подсистему 3, исполненную в виде модуля обработки и принятия решений, что в соответствии с замыслом, на первом этапе работы системы безопасности обеспечивает автоматизированную проверку поступивших данных на предмет усталости или отвлечения водителя, а уже на втором этапе обеспечивает комплексную детальную проверку поступивших данных, которые сопоставляются в последствии с установленными/нормированными значениями деятельности водителя, определяя соответственно своевременные и важные решения о возможности или невозможности продолжения управления водителем транспортного средства, что безусловно оптимизирует показатели эффективности и безопасности работы транспортного предприятия, рационализируя, в частности, эксплуатационную нагрузку и снижая при этом угрозу возникновения аварийных ситуаций.
Таким образом предлагаемая комбинированного типа система активной безопасности, подразумевающая использование совмещенного между собой контрольно-регистрационного и предупреждающего вычислительного оборудования, содержащего средства видеоконтроля и предупреждения об опасности позволяет в режиме реального времени постоянно следить в удаленном режиме за состоянием водителя, а кроме того точно определять ситуации предельно возможного времени управления транспортного средства в относительно стабильном и безопасном режиме, не провоцирующем возникновение аварийных ситуаций со стороны водителя.
Предлагаемое изобретение может найти широкое применение в области коммерческих пассажирских и грузовых перевозок, производящихся преимущественно наземными транспортными средствами.
| название | год | авторы | номер документа |
|---|---|---|---|
| МНОГОФУНКЦИОНАЛЬНЫЙ ПРОГРАММНО-АППАРАТНЫЙ КОМПЛЕКС ДЛЯ АВТОМАТИЗАЦИИ И ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ПАССАЖИРСКИХ ПЕРЕВОЗОК | 2022 |
|
RU2784825C1 |
| ПЕРЕНОСНОЕ ТРАНСПОРТНОЕ СРЕДСТВО С СИСТЕМОЙ ИНТЕЛЛЕКТУАЛЬНОГО АНАЛИЗА ДОРОЖНОЙ ОБСТАНОВКИ | 2021 |
|
RU2762591C1 |
| Способ определения опасных состояний на дорогах общего пользования на основе мониторинга ситуации в кабине транспортного средства | 2018 |
|
RU2703341C1 |
| Способ управления движением автомобильной техники в составе колонны с учетом состояния опорной поверхности, рельефа и кривизны маршрута | 2022 |
|
RU2790889C1 |
| СПОСОБ ОСУЩЕСТВЛЕНИЯ МОНИТОРИНГА УЛИЧНО-ДОРОЖНОЙ СЕТИ ПОСРЕДСТВОМ ПЕРЕДВИЖНОЙ ДОРОЖНОЙ ЛАБОРАТОРИИ И СРЕДСТВО ЛОКАЛЬНОЙ ПОДСВЕТКИ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2372442C1 |
| СИСТЕМА КОМПЛЕКСНОЙ БЕЗОПАСНОСТИ ТРАНСПОРТНОГО СРЕДСТВА | 2004 |
|
RU2249514C1 |
| Система контроля и мониторинга автотранспортных средств | 2020 |
|
RU2738664C1 |
| АВТОМОБИЛЬНАЯ СИСТЕМА РЕКОМЕНДАЦИЙ ДЛЯ ВОДИТЕЛЯ | 2012 |
|
RU2599593C2 |
| Комбинированный комплекс контрольно-пропускных пунктов (КПП) для системы физической защиты (СФЗ) особо важных объектов с автоматизацией процессов контроля и управления доступом | 2022 |
|
RU2792788C1 |
| Способ помощи водителю наземного транспортного средства при обгоне | 2023 |
|
RU2831037C1 |

Изобретение относится к транспортным средствам. Система активной безопасности транспортного средства c контролируемым эксплуатационным режимом содержит соединенные между собой центральную контрольно-измерительную подсистему и вспомогательную контрольно-вычислительную подсистему, поддерживающие связь с внешней структурой. Центральная подсистема регистрирует скорость и режимы труда/отдыха водителя и передает оперативные данные на сервер. Вспомогательная контрольно-вычислительная подсистема определяет усталость водителя по его облику путем сопоставления влияющих на усталость нормированных значений с обработанными фактическими и в случае выявления невнимательности и/или усталости водителя формирует сигнал, поступающий в исполнительную подсистему предупреждения. Повышается оперативность предупреждения возникновения аварийных ситуаций и точность выявления признаков, свидетельствующих о предельно допустимом времени пребывания водителя за рулем. 2 ил.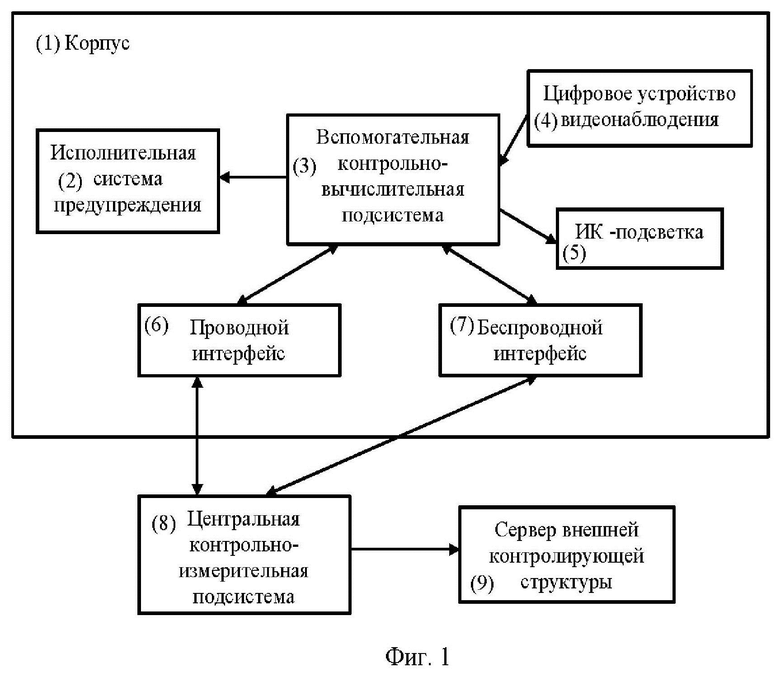
Система активной безопасности транспортного средства c контролируемым эксплуатационным режимом, содержащая обоюдно соединенные между собой посредством проводных и/или беспроводных интерфейсов центральную контрольно-измерительную подсистему и вспомогательную контрольно-вычислительную подсистему, образующие объединенный регистрационно-исследовательский дорожный блок, поддерживающий связь с внешней контролирующей эксплуатационный режим транспортного средства структурой, при этом центральная контрольно-измерительная подсистема имеет возможность регистрации скорости и режимов труда/отдыха водителя транспортного средства, а также передачи на сервер упомянутой внешней контролирующей структуры соответствующих или несоответствующих условиям относительно безопасного режима вождения оперативных данных, получаемых в результате сопоставления влияющих на усталость нормированных значений с обработанными фактическими, позволяющими определять усталость, видеоданными облика водителя, получаемыми в режиме реального времени цифровым устройством видеонаблюдения, предварительно передающим их в упомянутую вспомогательную контрольно-вычислительную подсистему, выполненную в виде модуля обработки видеоданных и принятия решений, который в случае выявления признаков невнимательности и/или усталости водителя транспортного средства формирует предупредительный командный сигнал, поступающий в исполнительную подсистему предупреждения, оснащенную звуковоспроизводящими и/или светоиспускающими средствами.

