Изобретение относится к военной технике, а именно к аппаратуре лазерного целеуказания и дальнометрии.
Известны лазерные целеуказатели-дальномеры (ЛЦД), предназначенные для визуальной разведки целей на местности, измерения дальности и угловых координат целей и лазерного целеуказания [1].
Недостатками известного ЛЦД являются необходимость приложения значительных усилий для преодоления сил сопротивления повороту на системе наведения при быстром перебросе приемопередающего блока для засечки разрыва неуправляемого боеприпаса при корректировке стрельбы, а также возникновение погрешностей измерений на отдельных участках угла поворота.
Наиболее близким по технической сущности к предлагаемому устройству является лазерный целеуказатель-дальномер, описанный в [2].
Указанный ЛЦД содержит приемопередающий блок с оптическим визиром и прицельной маркой, треногу и систему наведения, сопряженные между собой с помощью опорных элементов и зажимных механизмов, при этом система наведения включает корпус, на котором смонтированы привода наведения в горизонтальной и вертикальной плоскостях с маховичками ручного управления изменением угловой скорости приемопередающего блока, круговая плоская направляющая, измерители горизонтальных и вертикальных углов и поворотная платформа, осевую систему, выполненную в виде трех равномерно расположенных по окружности конических роликов, размещенных на основании с возможностью контактирования своими образующими с круговой плоской направляющей, оси которых пересекаются с осью поворота корпуса в точке, лежащей на плоскости, совпадающей с круговой плоской направляющей, и механизм быстрого переброса приемопередающего блока без потери отсчета горизонтальных углов, включающий три фиксирующих устройства, установленных равномерно на основании и выполненных в виде выжимного диска с тремя равномерно расположенными по окружности кулачками, трех толкателей, установленных в основании с возможностью осевого перемещения и торцевой зубчатой муфты, а привод наведения в горизонтальной плоскости содержит ведомое зубчатое колесо, установленное на основании с возможностью относительного поворота и контактирования с указанными фиксирующими устройствами.
В известном ЛЦД выполнение механизма быстрого переброса приемопередающего блока в виде выжимного диска с тремя равномерно расположенными по окружности кулачками, трех толкателей, установленных в основании с возможностью осевого перемещения и торцевой зубчатой муфты обеспечивает отключение ведомого зубчатого колеса от неподвижного основания, однако для этого требуется приложения значительного усилия к выжимному диску для отключения торцевой зубчатой муфты и его поворота, что может привести к смещению треноги вместе с приемопередающим блоком и повлиять на точность определения координат в особенности при размещении последней на грунтах или поверхностях с низким коэффициентом сцепления. Кроме того, переход в режим быстрого переброса увеличивает время непосредственного наведения приемопередающего блока и снижает вероятность определения координат и дальности до облака от разрыва неуправляемых боеприпасов. Также стоит отметить, что в процессе точного наведения оператору необходимо непрерывно производить вращение приводных маховичков, что вызывает нежелательные колебания приемопередающего блока и снижает точность наведения на цель.
Задачей настоящего изобретения является повышение быстродействия и точности наведения на цель.
Указанная задача решается за счет того, что в известном ЛЦД система наведения снабжена блоками управления горизонтальным и вертикальным приводами с электрическими приводными двигателями, дополнительным фиксирующим устройством, расположенным на корпусе и предназначенным для его фиксации относительно основания, при этом ведомое зубчатое колесо выполнено с внутренней и наружной цилиндрическими поверхностями, а каждое фиксирующее устройство быстрого переброса приемопередающего блока выполнено в виде подпружиненного относительно основания полого корпуса с V-образными впадинами, расположенными симметрично на его сторонах, пружинной рамки ромбической формы, актюатора, размещенного в последней вдоль длинной ее диагонали, фрикционной накладки с V-образными выступами предназначенной для контактирования с внутренней цилиндрической поверхностью ведомого зубчатого колеса и V-образными впадинами подпружиненного полого корпуса, натяжителя, установленного с возможностью перемещения и взаимодействия со стороной подпружиненной рамки, расположенной перпендикулярно малой ее диагонали, а противоположная ей сторона жестко связана с фрикционной накладкой, причем дополнительное фиксирующее устройство корпуса системы наведения, выполнено аналогично одному из основных фиксирующих устройств и размещено с возможностью контактирования своей фрикционной накладкой с наружной цилиндрической поверхностью ведомого зубчатого колеса, а блоки управления горизонтальным и вертикальным приводами включают широтно-импульсные модуляторы, предназначенные для формирования управляющих сигналов для приводных электрических двигателей посредством переменных резисторов, подвижные элементы которых связаны с соответствующими маховичками, при этом блок управления горизонтальным приводом дополнительно включает источники напряжения для подключения актюаторов трех фиксирующих и дополнительного фиксирующего устройств таким образом, что при быстром перебросе приемопередающего блока и при включении электродвигателя привода горизонтального наведения маховичком актюаторы всех фиксирующих устройств находятся под соответствующим напряжением, а при отключении напряжения накопительный заряд с актюаторов снимается за счет разряда на введенные в блок управления горизонтальным приводом разрядные резисторы.
Выполнение в системе наведения основных и дополнительного фиксирующих устройств на основе актюаторов, питание которых обеспечивается источниками напряжения блока управления горизонтальным приводом, позволило значительно снизить момент сопротивления повороту при быстром перебросе приемопередающего устройства, увеличить быстродействие и точность наведения на цель, т.к. включение актюаторов производится мгновенно и управляется кнопкой, размещенной на корпусе системы наведения не передающей дополнительных усилий на последнюю, а наличие дополнительного фиксирующего устройства, исключает свободное перемещение корпуса из-за наличия зазоров в кинематической цепи горизонтального привода в момент удержания на цели в режиме дальнометрирования и измерения угловых координат, при этом выполнение фиксирующих устройств в виде подпружиненного относительно основания полого корпуса с V-образными впадинами, расположенными симметрично на его сторонах, пружинной рамки ромбической формы, актюатора, размещенного в последней вдоль длинной ее диагонали, фрикционной накладки с V-образными выступами предназначенной для контактирования с внутренней цилиндрической поверхностью ведомого зубчатого колеса и V-образными впадинами подпружиненного полого корпуса, натяжителя, установленного с возможностью перемещения и взаимодействия со стороной подпружиненной рамки, расположенной перпендикулярно малой ее диагонали, а противоположная ей сторона жестко связана с фрикционной накладкой, позволило создать необходимое фрикционное усилие торможения на ведомом зубчатом колесе относительно основания за счет размещения актюаторов в пружинной рамке ромбической формы и увеличения величины перемещения фрикционной накладки, примерно в три раза (0,15…0,2 мм), по сравнению с изменением размера актюатора (0,032 мм.) при подачи на него напряжения, наличие натяжителя обеспечило создание предварительного усилия на торцы актюатора, которое необходимо в процессе регулировки и настройки в соответствии с эксплуатационными требованиями к актюатарам, а соединение фрикционной накладки с полым подпружиненным корпусом посредством V-образных элементов обеспечило наилучшее прилегание фрикционных накладок к цилиндрическим поверхностям ведомого зубчатого колеса. Кроме того, использование в системе наведения лазерного целеуказателя-дальномера блоков управления горизонтальным и вертикальным приводами с электрическими приводными двигателями, позволило избавиться от необходимости непрерывного вращения приводных маховичков оператором и устранить нежелательные колебания приемопередающего блока во время точного наведения.
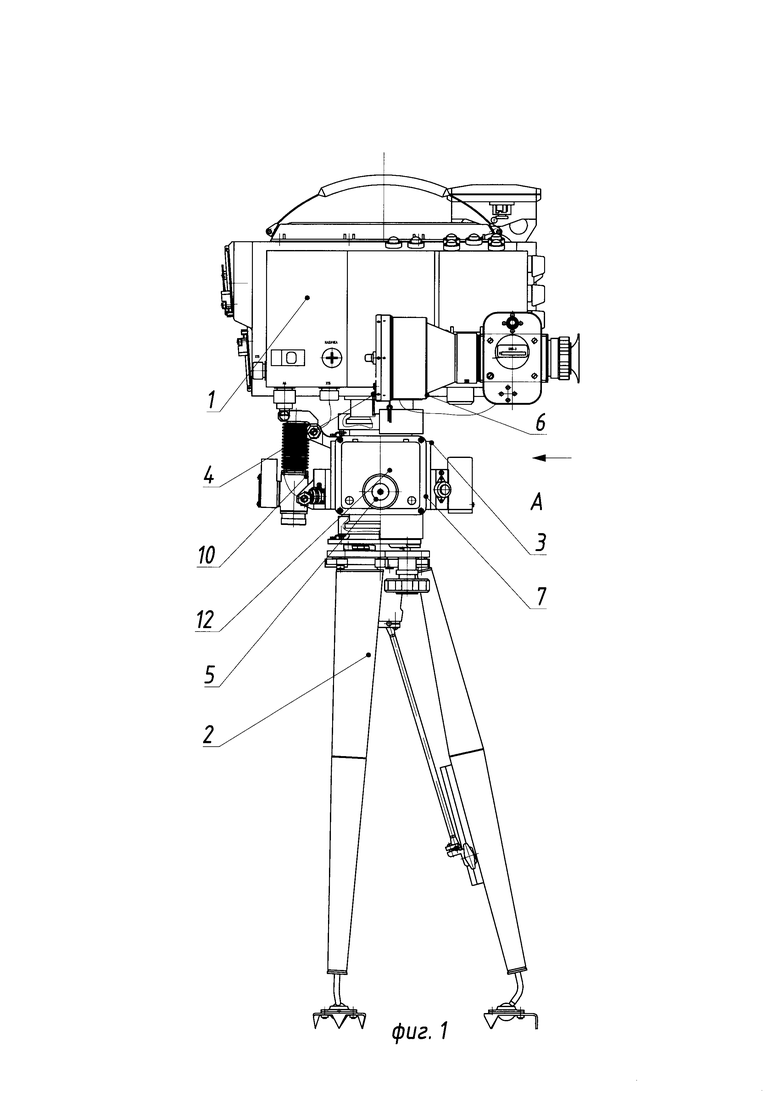
На фиг. 1 показан лазерный целеуказатель-дальномер.
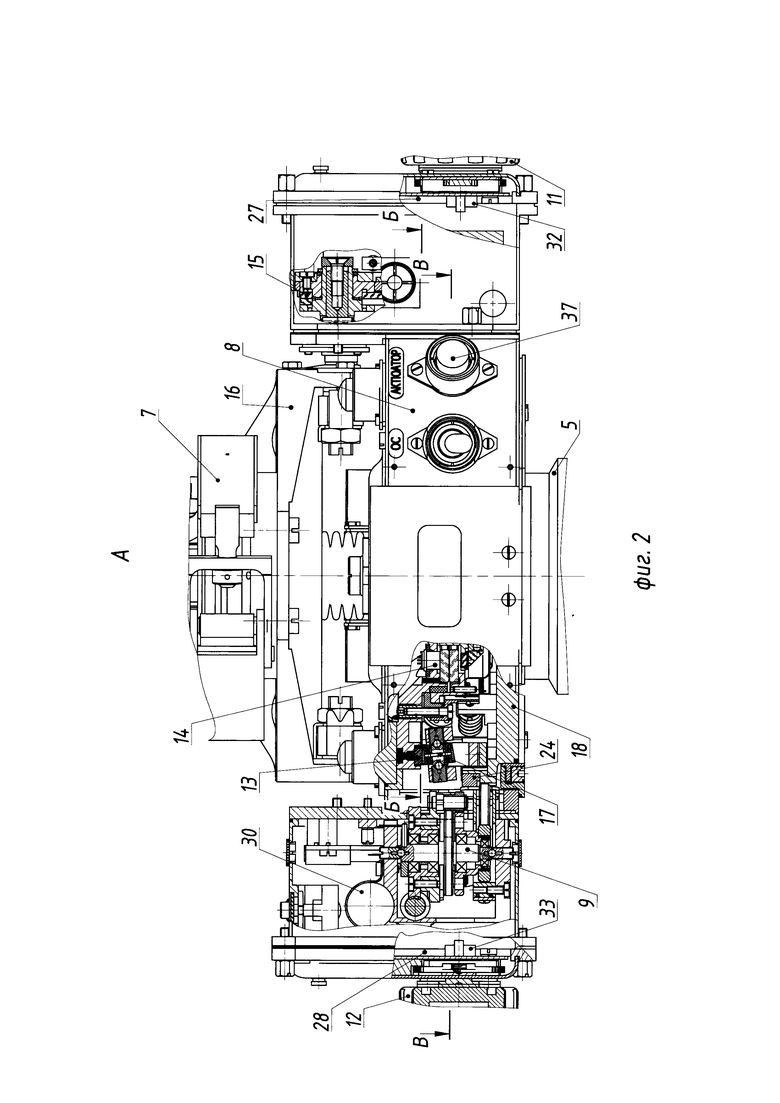
На фиг. 2 показана часть лазерного целеуказателя-дальномера - система наведения по стрелке А на фиг. 1.
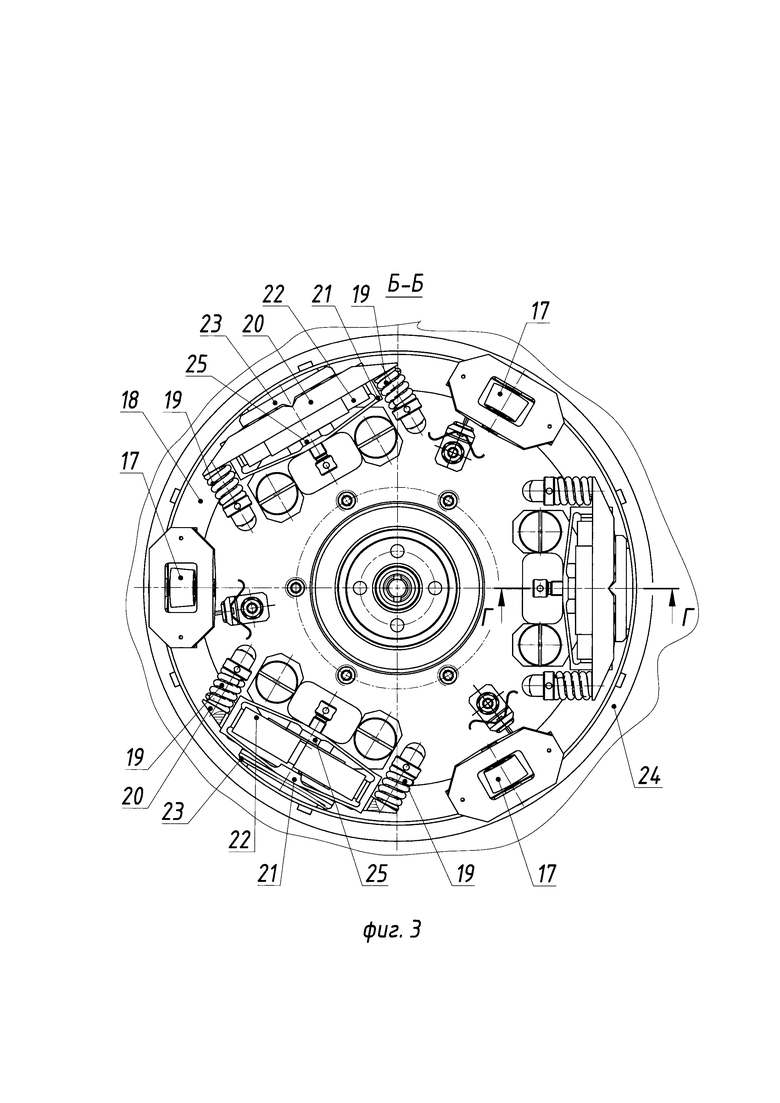
На фиг. 3 показано сечение Б-Б на фиг. 2
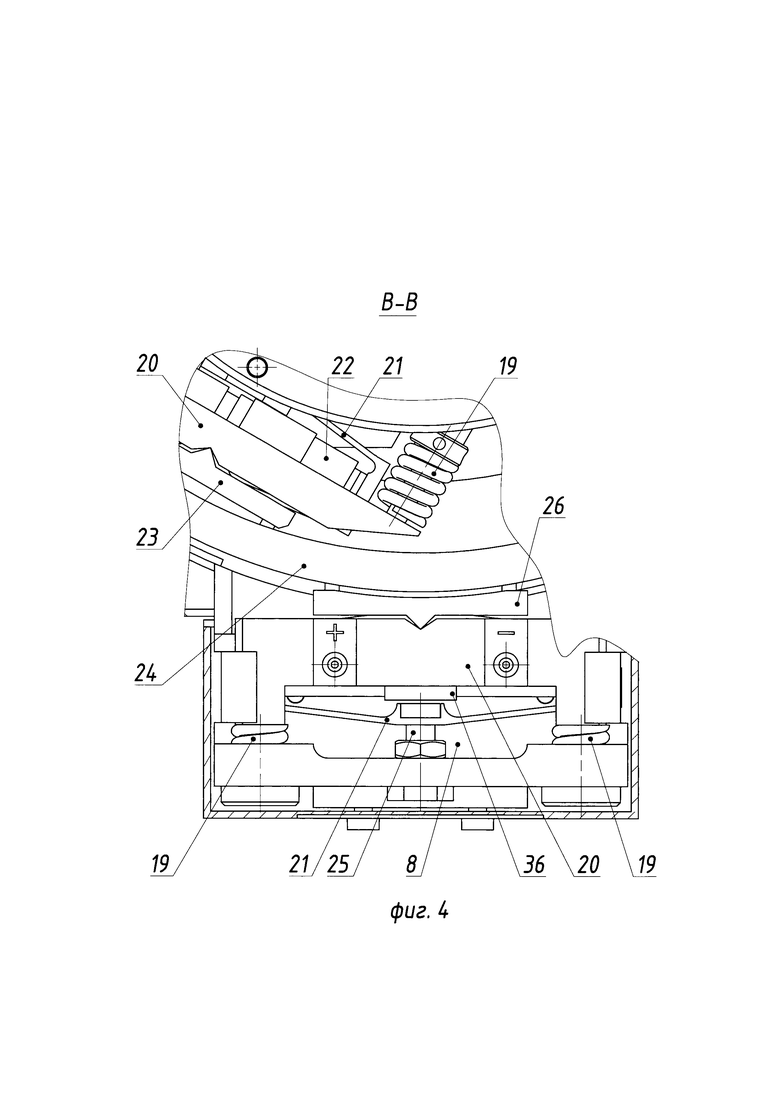
На фиг. 4 показано сечение В-В на фиг. 2
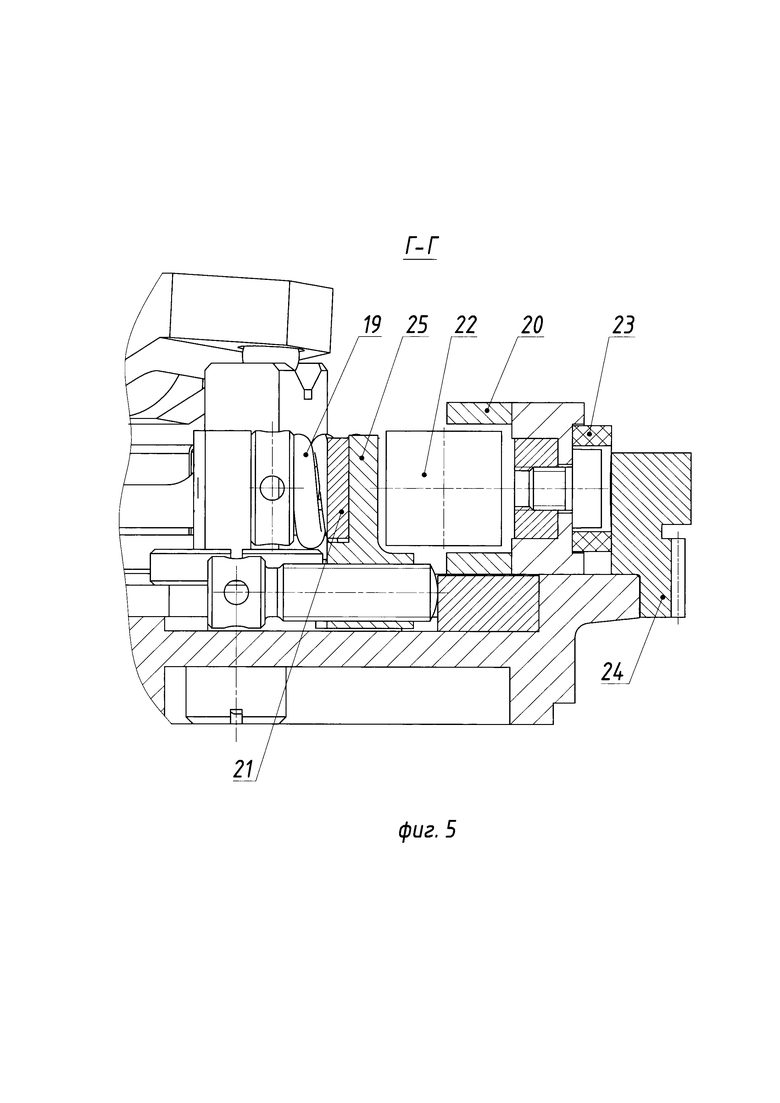
На фиг. 5 показано сечение Г-Г на фиг. 3
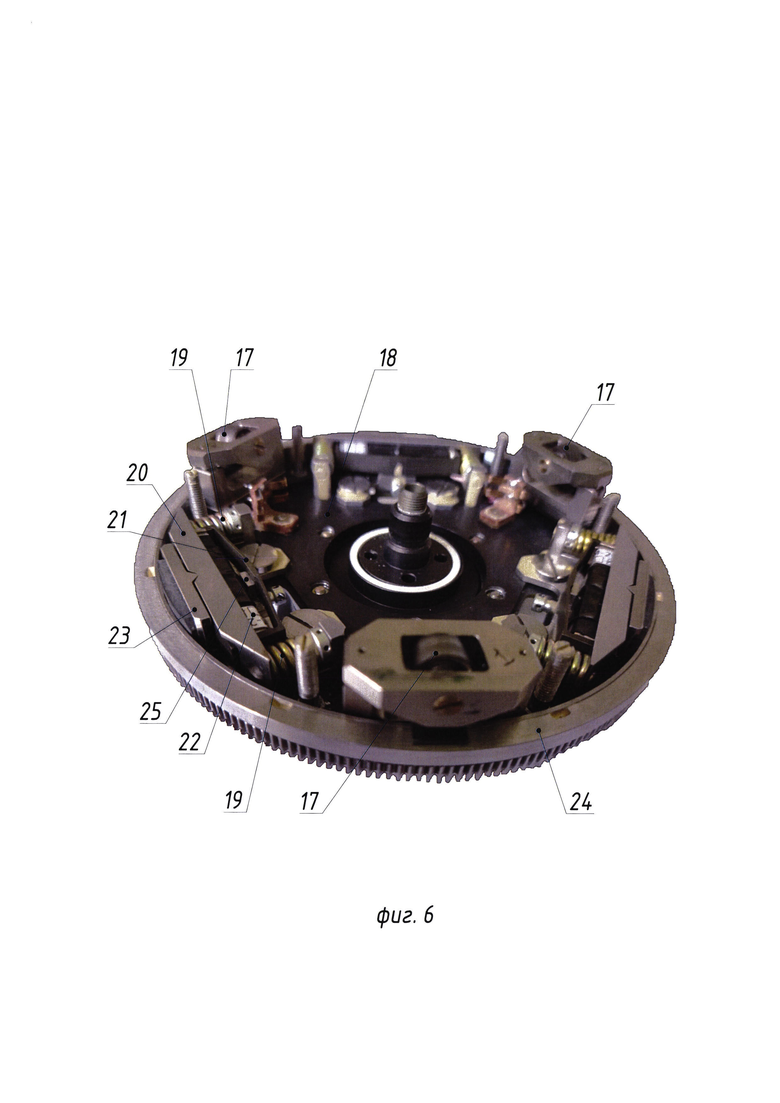
На фиг. 6 показана фотография части системы наведения - осевая система, где размещаются три опорных ролика и три фиксирующих устройства на основании.
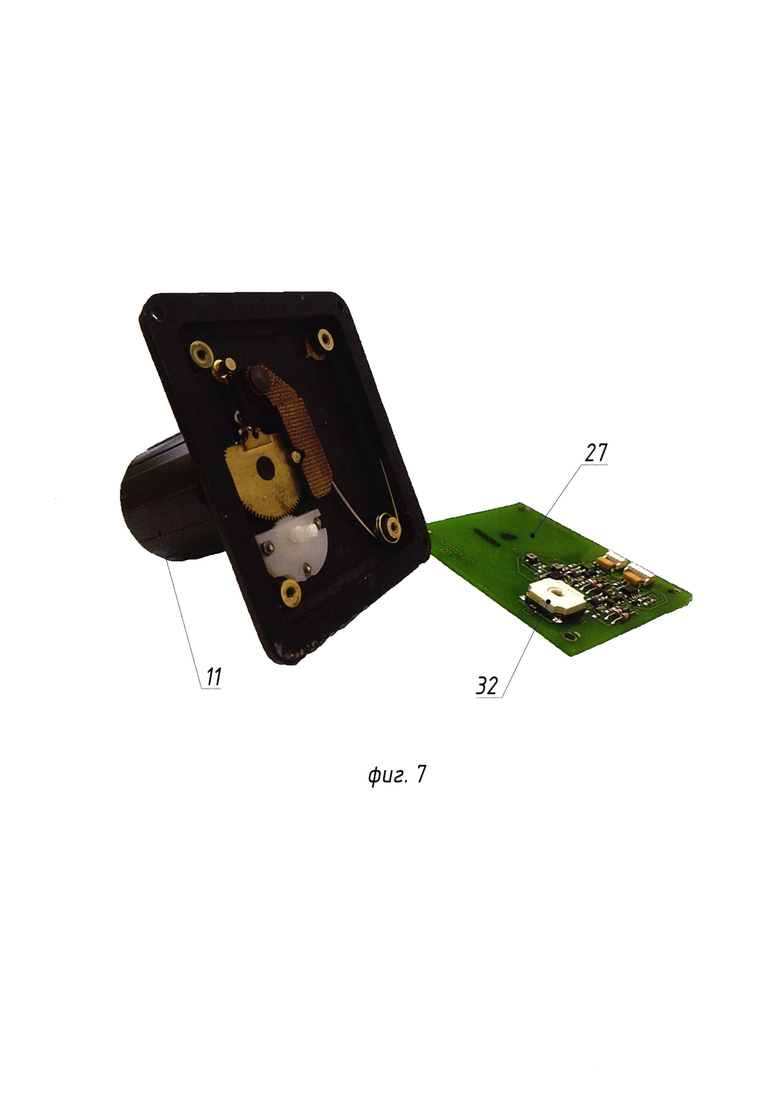
На фиг. 7 показана фотография конструкции сопряжения маховичка с переменным резистором блока управления горизонтальным приводом.
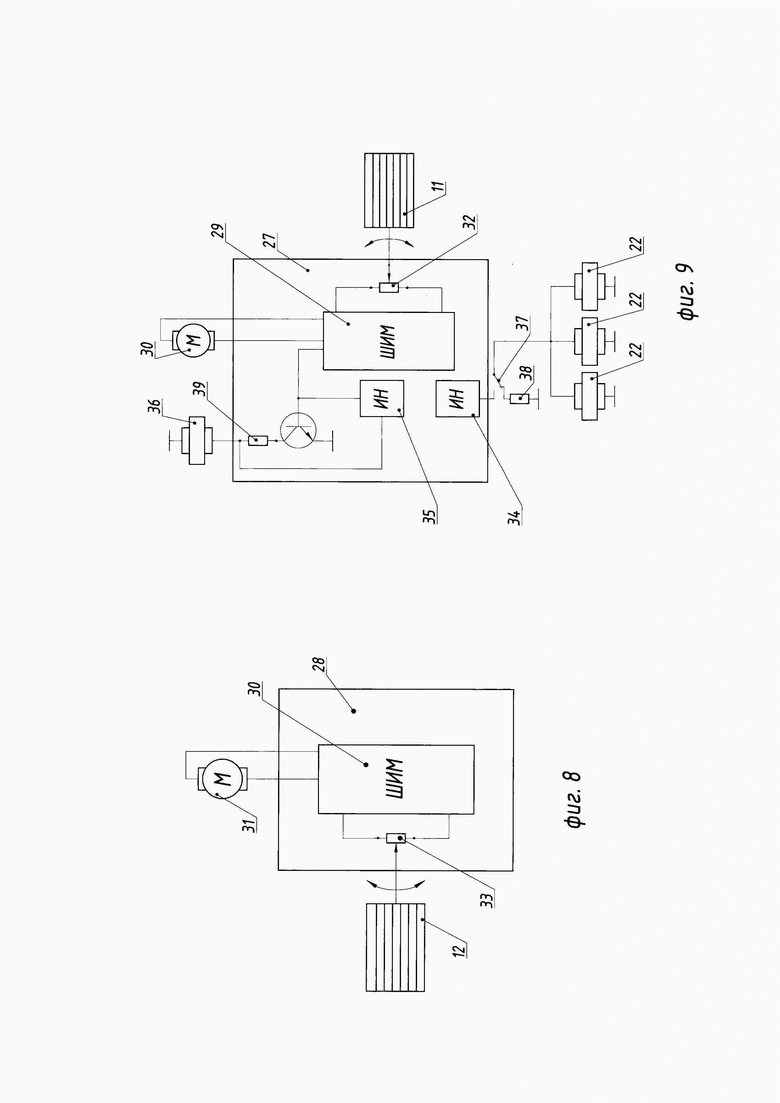
На фиг. 8 показана схема блока управления вертикальным приводом.
На фиг. 9 показана схема блока управления горизонтальным приводом.
Лазерный целеуказатель-дальномер содержит приемопередающий блок 1 с оптическим визиром и прицельной маркой, треногу 2 и систему наведения 3, сопряженные между собой с помощью опорных элементов 4, 5 и зажимных механизмов 6, 7. Система наведения 3 включает корпус 8, на котором смонтированы привода наведения в горизонтальной 9 и вертикальной 10 плоскостях с маховичками соответственно 11 и 12 управления изменением угловой скорости приемопередающего блока 1, круговая плоская направляющая 13, измерители горизонтальных 14 и вертикальных 15 углов и поворотная платформа 16, осевую систему, выполненную в виде трех равномерно расположенных по окружности конических роликов 17, размещенных на основании 18 с возможностью контактирования своими образующими с круговой плоской направляющей 13, оси которых пересекаются с осью поворота корпуса 8 в точке, лежащей на плоскости, совпадающей с круговой плоской направляющей 13, механизм быстрого переброса приемопередающего блока 1 без потери отсчета горизонтальных углов, включающий три фиксирующих устройства, установленных равномерно на основании 18, каждое из которых выполнено в виде подпружиненного пружинами 19 относительно основания 18 полого корпуса 20 с V-образными впадинами, расположенными симметрично на его сторонах, пружинной рамки 21 ромбической формы, актюатора 22, размещенного в последней вдоль длинной ее диагонали, фрикционной накладки 23 с V-образными выступами, предназначенной для контактирования с внутренней цилиндрической поверхностью ведомого зубчатого колеса 24 привода наведения 9 в горизонтальной плоскости и V-образными впадинами подпружиненного полого корпуса 20, натяжителя 25, установленного с возможностью перемещения и взаимодействия с внутренней стороной пружинной рамки 21, расположенной перпендикулярно малой ее диагонали, а противоположная ей сторона жестко связана с фрикционной накладкой 23. На корпусе 8 системы наведения 3 также размещены дополнительное фиксирующее устройство, выполненное аналогично основным и предназначено для взаимодействия своей фрикционной накладкой 26 с наружной цилиндрической поверхностью ведомого зубчатого колеса 24, блоки управления горизонтальным 27 и вертикальным 28 приводами, которые включают широтно-импульсные модуляторы (ШИМ) 29, 30 предназначенные для формирования управляющих сигналов регулирования частоты вращения приводных электрических двигателей 30 и 31 посредством переменных резисторов 32 и 33, подвижные элементы которых связаны с соответствующими маховичками 11 и 12, при этом блок управления горизонтальным приводом 27 дополнительно включает источники напряжения (ИН) 34 и 35 для подключения, соответственно, актюаторов 22 трех фиксирующих и актюатора 36 дополнительного фиксирующего устройства таким образом, что в нажатом положении кнопки 37, расположенной на корпусе 8, и при повороте маховичка 11 от нейтрального положения актюаторы 22 и 36 всех фиксирующих устройств находятся под напряжением, в противном случае напряжение отключено и накопительный заряд с актюаторов 22 и 36 стекает через разрядные резисторы 38 и 39 блока управления горизонтальным приводом 27.
Лазерный целеуказатель-дальномер работает следующим образом. При развертывании на местности сопрягают треногу 2, систему наведения 3 и приемопередающий блок 1 посредством соответствующих опорных элементов 4, 5 и фиксируют зажимными механизмами 6, 7. Обеспечивают электрическую связь системы наведения 3 с приемопередающим блоком 1 и подключают последний к электропитанию. В режиме наведения на цель или ее сопровождения оператор поворачивает маховички 11, 12 в необходимом направлении от нейтрального их положения, что вызывает перемещение подвижных элементов переменных резисторов 32 и 33 блоков управления горизонтальным 27 и вертикальным 28 приводами, включаются широтно-импульсные модуляторы 29, 30, которые формируют управляющие сигналы для приводных электрических двигателей 30, 31. Одновременно управляющие сигналы поступают в источник напряжения 35 блока управления горизонтальным приводом 27, включая подачу напряжения на актюатор 36 дополнительного фиксирующего устройства и его фрикционная накладка 26 отводится от наружной цилиндрической поверхности ведомого зубчатого колеса 24, тем самым освобождая корпус 8 для свободного поворота. Ведущее зубчатое колесо привода наведения по горизонту 9, находясь в постоянном зацеплении с ведомым зубчатым колесом 24, обкатывается относительно последнего, поворачивая корпус 8 на заданный угол. Привод вертикального наведения 10 поворачивает поворотную платформу 16 до заданного угла места. Таким образом приемопередающий блоком 1 перемещается по двум взаимно перпендикулярным координатам до совмещения прицельной марки с целью. Оператор возвращает маховички И, 12 в нейтральное положение. С ШИМ 29, 30 прекращаются поступать управляющие сигналы и приводные электрические двигатели 30, 31 останавливаются. Одновременно с актюатора 36 дополнительного фиксирующего устройства снимается напряжение и накопленный заряд стекает через разрядный резистор 39 блока управления горизонтальным приводом 27 на корпус. Длина актюатора 36 уменьшается, что приводит к увеличению размера пружинной рамки 21 по малой диагонали. Фрикционная накладка 26 перемещается к наружной цилиндрической поверхности ведомого зубчатого колеса 24, фиксируя корпус 8 относительно неподвижного основания, т.к. в этот момент ведомое зубчатое колесо 24 также заторможено. Оператор проводит мероприятия по определению дальности и координат цели или осуществляет подсветку цели для работы с управляемыми боеприпасами. В режиме быстрого переброса для засечки облака разрыва неуправляемого боеприпаса для корректировки стрельбы оператор нажимает на кнопку 37, соединяя цепь питания актюаторов 22 трех фиксирующих устройств с источником напряжения 34 блока управления горизонтальным приводом 27. Длина актюаторов 22 увеличивается, а размер пружинных рамок 21 ромбической формы по малой диагонали уменьшается. Фрикционные накладки 23 перемещаются от внутренней цилиндрической поверхности ведомого зубчатого колеса 24 тем самым обеспечивая свободный поворот последнего относительно неподвижного основания 18. Оператор удерживая кнопку 37 в нажатом положении осуществляет вручную быстрый поворот корпуса 8 системы наведения 3 совместно с ведомым зубчатым колесом 24 и приемопередающим блоком 1 на угол до облака разрыва, наблюдая в визирный канал, отпускает кнопку 37, замыкая цепь разрядного резистора 38, напряжение с актюаторов 22 резко уменьшается. Далее процесс протекает в обратной последовательности, фиксируя положение приемопередающего блока 1 от поворота. Оператор измеряет дальность и угловые координаты до облака разрыва.
Благодаря описанному техническому решению выполняется задача повышения быстродействия и точности наведения на цель за счет применения в фиксирующих устройствах актюаторов мгновенного действия размещенных в пружинных рамках ромбической формы и использования в приводах наведения электрических двигателей, связанных с системой управления актюатора дополнительного фиксирующего устройства.
Данные выводы подтверждены серийным применением в реальных условиях лазерного целеуказателя-дальномера.
Источники информации:
1. Лазерный целеуказатель-дальномер ЛЦД-2. Техническое описание и инструкция по эксплуатации ет1.040.011 ТО. 1995 г. Стр.1-9, 21-25, 30, 33, 36-38, 42-45, 107, 108, 128, 129, 134-136; Чертежи: ет1.040.011 МЧ - монтажный чертеж, ет2.379.007 СБ - система наведения (сборочный чертеж)
2. Лазерный целеуказатель-дальномер, Патент РФ №2269093 от 27.01.2006 г. с приоритетом от 07.07.2004 г. - прототип.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛАЗЕРНЫЙ ЦЕЛЕУКАЗАТЕЛЬ-ДАЛЬНОМЕР | 2004 |
|
RU2269093C1 |
| ЛАЗЕРНЫЙ ЦЕЛЕУКАЗАТЕЛЬ-ДАЛЬНОМЕР | 2012 |
|
RU2522784C1 |
| УЧЕБНЫЙ ДАЛЬНОМЕР | 2006 |
|
RU2338144C2 |
| ЛАЗЕРНЫЙ ЦЕЛЕУКАЗАТЕЛЬ-ДАЛЬНОМЕР | 2017 |
|
RU2665352C1 |
| ЛАЗЕРНЫЙ ЦЕЛЕУКАЗАТЕЛЬ-ДАЛЬНОМЕР | 1996 |
|
RU2104485C1 |
| ЛАЗЕРНЫЙ ЦЕЛЕУКАЗАТЕЛЬ-ДАЛЬНОМЕР | 2013 |
|
RU2539773C1 |
| СПОСОБ ПОВЫШЕНИЯ ПОМЕХОЗАЩИЩЕННОСТИ УПРАВЛЯЕМЫХ БОЕПРИПАСОВ С ЛАЗЕРНОЙ СИСТЕМОЙ НАВЕДЕНИЯ | 2020 |
|
RU2755592C1 |
| ЛАЗЕРНЫЙ ЦЕЛЕУКАЗАТЕЛЬ-ДАЛЬНОМЕР | 2013 |
|
RU2535240C1 |
| СПОСОБ СТРЕЛЬБЫ УПРАВЛЯЕМЫМ СНАРЯДОМ С ЛАЗЕРНОЙ ПОЛУАКТИВНОЙ ГОЛОВКОЙ САМОНАВЕДЕНИЯ | 2003 |
|
RU2247297C1 |
| СПОСОБ СТРЕЛЬБЫ УПРАВЛЯЕМОЙ РАКЕТОЙ С ЛАЗЕРНОЙ ПОЛУАКТИВНОЙ ГОЛОВКОЙ САМОНАВЕДЕНИЯ | 2011 |
|
RU2468327C1 |
Изобретение относится к аппаратуре лазерного целеуказания и дальнометрии. Сущность заявленного изобретения заключается в следующем. Лазерный целеуказатель-дальномер (ЛЦД) содержит приемопередающий блок с оптическим визиром и прицельной маркой, треногу и систему наведения. При этом система наведения снабжена блоками управления горизонтальным и вертикальным приводами с электрическими приводными двигателями, фиксирующими устройствами быстрого переброса приемопередающего блока и дополнительным фиксирующим устройством, предназначенным для фиксации корпуса относительно основания. При этом ведомое зубчатое колесо привода горизонтального перемещения выполнено с внутренней и наружной цилиндрическими поверхностями, а фиксирующие устройства выполнены в виде подпружиненного полого корпуса пружинной рамки ромбической формы, актюатора, размещенного в последней вдоль длинной ее диагонали, натяжителя, установленного с возможностью взаимодействия со стороной подпружиненной рамки, расположенной перпендикулярно малой ее диагонали, а противоположная ей сторона жестко связана с фрикционной накладкой. При этом фрикционная накладка основного фиксирующего устройства предназначена для контактирования с внутренней цилиндрической поверхностью ведомого зубчатого колеса. Фрикционная накладка дополнительного фиксирующего устройства предназначена для контактирования с его наружной цилиндрической поверхностью. Кроме того, блоки управления горизонтальным и вертикальным приводами включают широтно-импульсные модуляторы, предназначенные для формирования управляющих сигналов регулирования частоты вращения электродвигателей посредством переменных резисторов, подвижные элементы которых связаны с соответствующими маховичками. При этом блок управления горизонтальным приводом дополнительно включает источники напряжения для подключения актюаторов фиксирующих устройств таким образом, что при быстром перебросе приемопередающего блока и при включении электродвигателя привода горизонтального наведения маховичком актюаторы всех фиксирующих устройств находятся под соответствующим напряжением. При отключении напряжения накопительный заряд с актюаторов снимается за счет разряда на введенные в блок управления горизонтальным приводом разрядные резисторы. Техническим результатом заявленного изобретения является повышение быстродействия и точности наведения на цель. 9 ил.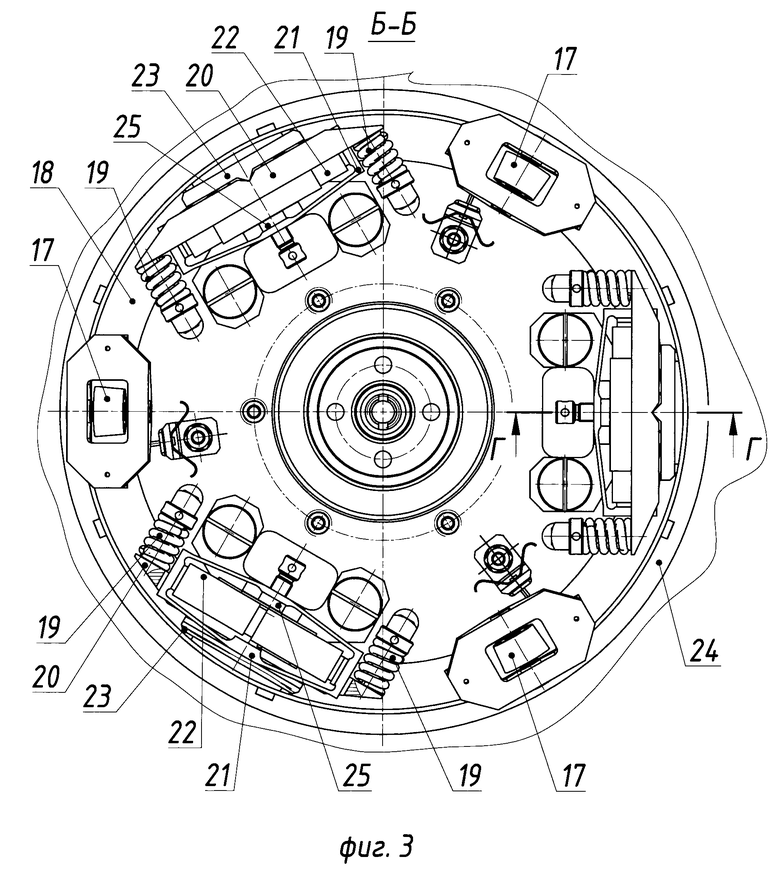
Лазерный целеуказатель-дальномер, содержащий приемопередающий блок с оптическим визиром и прицельной маркой, треногу и систему наведения, сопряженные между собой с помощью опорных элементов и зажимных механизмов, при этом система наведения включает корпус, на котором смонтированы приводы наведения в горизонтальной и вертикальной плоскостях с маховичками управления изменением угловой скорости приемопередающего блока, круговая плоская направляющая, измерители горизонтальных и вертикальных углов и поворотная платформа, осевую систему, выполненную в виде трех равномерно расположенных по окружности конических роликов, размещенных на основании с возможностью контактирования своими образующими с круговой плоской направляющей, оси которых пересекаются с осью поворота корпуса в точке, лежащей на плоскости, совпадающей с круговой плоской направляющей, и механизм быстрого переброса приемопередающего блока без потери отсчета горизонтальных углов, включающий три фиксирующих устройства, установленных равномерно на основании, а привод наведения в горизонтальной плоскости содержит ведомое зубчатое колесо, установленное на основании с возможностью относительного поворота и контактирования с указанными фиксирующими устройствами, отличающийся тем, что с целью повышения быстродействия и точности наведения на цель система наведения снабжена блоками управления горизонтальным и вертикальным приводами с электрическими приводными двигателями, дополнительным фиксирующим устройством, расположенным на корпусе и предназначенным для его фиксации относительно основания, при этом ведомое зубчатое колесо выполнено с внутренней и наружной цилиндрическими поверхностями, а каждое фиксирующее устройство быстрого переброса приемопередающего блока выполнено в виде подпружиненного относительно основания полого корпуса с V-образными впадинами, расположенными симметрично на его сторонах, пружинной рамки ромбической формы, актюатора, размещенного в последней вдоль длинной ее диагонали, фрикционной накладки с V-образными выступами, предназначенной для контактирования с внутренней цилиндрической поверхностью ведомого зубчатого колеса и V-образными впадинами подпружиненного полого корпуса, натяжителя, установленного на основании с возможностью перемещения и взаимодействия со стороной подпружиненной рамки, расположенной перпендикулярно малой ее диагонали, а противоположная ей сторона жестко связана с фрикционной накладкой, причем дополнительное фиксирующее устройство корпуса системы наведения выполнено аналогично одному из основных фиксирующих устройств и размещено с возможностью контактирования своей фрикционной накладкой с наружной цилиндрической поверхностью ведомого зубчатого колеса, а блоки управления горизонтальным и вертикальным приводами включают широтно-импульсные модуляторы, предназначенные для формирования управляющих сигналов для приводных электрических двигателей посредством переменных резисторов, подвижные элементы которых связаны с соответствующими маховичками, при этом блок управления горизонтальным приводом дополнительно включает источники напряжения для подключения актюаторов трех фиксирующих и дополнительного фиксирующего устройств таким образом, что при быстром перебросе приемопередающего блока и при включении электродвигателя привода горизонтального наведения маховичком актюаторы всех фиксирующих устройств находятся под соответствующим напряжением, а при отключении напряжения накопительный заряд с актюаторов снимается за счет разряда на введенные в блок управления горизонтальным приводом разрядные резисторы.
| ЛАЗЕРНЫЙ ЦЕЛЕУКАЗАТЕЛЬ-ДАЛЬНОМЕР | 2004 |
|
RU2269093C1 |
| ПРИБОР НАБЛЮДЕНИЯ-ПРИЦЕЛ СО ВСТРОЕННЫМ ЛАЗЕРНЫМ ДАЛЬНОМЕРОМ | 2018 |
|
RU2699125C1 |
| US 0004572625 A1, 25.02.1986 | |||
| DE 102016225411 A1, 21.06.2018. | |||

