Изобретение относится к военной технике, а именно к аппаратуре лазерного целеуказания и дальнометрии.
Известны лазерные целеуказатели-дальномеры (ЛЦД), предназначенные для визуальной разведки целей на местности, измерения дальности и угловых координат целей и лазерного целеуказания [1].
Недостатками известного ЛЦЦ являются большие габариты и, как следствие, избыточная масса изделия, отсутствие быстрого переброса приемопередающего блока, а также недостаточная точность измерительных механизмов.
Наиболее близким по технической сущности к предлагаемому устройству является лазерный целеуказатель-дальномер, описанный в [2].
Указанный ЛЦД содержит приемопередающий блок с оптическим визиром и прицельной маркой, треногу и систему наведения, сопряженные между собой с помощью опорных элементов и двух зажимных механизмов, а также привод наведения в вертикальной плоскости и поворотную платформу с закрепленной на ней осью, на которой установлен измеритель углов места, причем система наведения включает корпус, на котором смонтирован привод наведения в горизонтальной плоскости, измеритель горизонтальных углов с диафрагмой и лимбом и осевую систему, выполненную в виде трех равномерно расположенных по окружности конических опорных роликов, размещенных на основании, несущего элемента с круговой направляющей, расположенной с возможностью контактирования с образующими конических роликов, оси которых пересекаются с осью поворота несущего элемента в точке, лежащей на плоскости, совпадающей с плоскостью круговой направляющей, при этом привод наведения в горизонтальной плоскости выполнен с возможностью быстрого переброса приемопередающего блока без потери отсчета горизонтальных углов и включает ведомое зубчатое колесо, установленное на основании, а несущий элемент жестко связан с корпусом, между которым и основанием размещен узел герметизации внутренней полости системы наведения.
В этом ЛЦД быстрый переброс приемопередающего блока осуществляется за счет приложения значительных усилий оператором для преодоления сил сопротивления, которые обеспечивают фрикционное сцепление ведомого зубчатого колеса с основанием при плавном наведении в горизонтальной плоскости. Однако такая конструкция не обеспечивает наведение прицельной марки приемопередающего блока для засечки разрывов неуправляемых боеприпасов без доворота с использованием плавного наведения, что накладывает на оператора дополнительные трудности. При стрельбе неуправляемыми боеприпасами из-за большого разброса места разрыва по горизонту требуется за несколько секунд (4...6 с) визуально определить положение разрыва, обеспечить поворот приемопередающего блока до совмещения прицельной марки с облаком от разрыва, произвести замер дальности и считать его координаты, при этом использовать только плавное наведение от привода наведения в горизонтальной плоскости практически невозможно из-за, как правило, значительного углового перемещения приемопередающего блока. Преодоление сил сопротивления в момент быстрого переброса может привести к ошибке измерения, связанной с рассогласованием показаний измерителя горизонтальных углов с положением прицельной марки приемопередающего блока из-за механического смещения составных частей ЛЦД в местах сопряжения, а также смещения треноги относительно грунта, особенно если грунт слабый (песчаный, обледенелый). Размещение лимба и диафрагмы в известном ЛЦД на оси основания, при котором лимб жестко связан с последней, а диафрагма закреплена от поворота на несущем элементе и имеет возможность поворота относительно основания, приводит к ошибке показаний измерителя горизонтальных углов из-за дополнительного смещения диафрагмы относительно лимба на отдельных участках измерения. Указанная ошибка связана с отклонением от перпендикулярности расположения круговой направляющей к оси основания и наличием эксцентриситета между последней и осью поворота круговой направляющей. Эксцентриситет указанных осей не регулируется и зависит от точности подшипника, а положение круговой направляющей к оси основания может регулироваться. При наличии неперпендикулярности круговой направляющей при повороте ее ось описывает вокруг оси основания некоторый конус. Если смещение указанных осей совпадает с направлением штрихов на диафрагме и лимбе, то взаимное их перемещение не приводит к ошибке измерения, в противном случае появляется ошибка измерения. Ее наибольшая величина возникает при направлении смещения осей перпендикулярно штрихам лимба. Регулировка положения круговой направляющей в известном ЛЦД осуществляется за счет изменения толщины прокладок под опорными роликами, однако отклонение от перпендикулярности круговой направляющей практически не удается выполнить точнее 30 мкм из-за отсутствия тонкой регулировки без снятия опорных роликов с основания, что приводит к погрешности измерения горизонтального угла на отдельных участках до 11...20 угловых минут или 3...5 д.у. (делений угломера). Эта погрешность может повлиять на точность работы всего комплекса.
Задачей изобретения является повышение точности измерения угловых координат положения цели при плавном наведении и быстром перебросе приемопередающего блока в горизонтальной плоскости при оперативном определении места и измерении координат разрывов неуправляемых боеприпасов за счет введения тонкой регулировки положения оси поворота круговой направляющей, повышения жесткости сопряжения составных частей ЛЦД, увеличения плавности и снижения усилий сопротивления возникающих при быстром перебросе.
Указанная задача решается за счет того, что в известном лазерном целеуказателе-дальномере, содержащем приемопередающий блок с оптическим визиром и прицельной маркой, треногу и систему наведения, сопряженные между собой с помощью опорных элементов и двух зажимных механизмов, а также привод наведения в вертикальной плоскости и поворотную платформу с закрепленной на ней осью, на которой установлен измеритель углов места, причем система наведения включает корпус, на котором смонтирован привод наведения в горизонтальной плоскости, измеритель горизонтальных углов с диафрагмой и лимбом и осевую систему, выполненную в виде трех равномерно расположенных по окружности конических опорных роликов, размещенных на основании, несущего элемента с круговой направляющей, расположенной с возможностью контактирования с образующими конических роликов, оси которых пересекаются с осью поворота несущего элемента в точке, лежащей на плоскости, совпадающей с плоскостью круговой направляющей, при этом привод наведения в горизонтальной плоскости выполнен с возможностью быстрого переброса приемопередающего блока без потери отсчета горизонтальных углов и включает ведомое зубчатое колесо, установленное на основании, а несущий элемент жестко связан с корпусом, между которым и основанием размещен узел герметизации внутренней полости системы наведения, последняя снабжена выжимным диском с тремя равномерно расположенными по окружности кулачками, тремя толкателями, установленными в основании с возможностью осевого перемещения, и торцевой зубчатой муфтой, одна из полумуфт которой закреплена на ведомом зубчатом колесе, а другая выполнена в виде трех равномерно расположенных по окружности зубчатых секторов, каждый из которых закреплен на основании с возможностью перемещения вдоль оси поворота и зацепления своими зубьями с зубьями полумуфты ведомого зубчатого колеса, при этом толкатели установлены с возможностью одновременного контактирования с зубчатыми секторами и с поверхностью кулачков, а выжимной диск установлен на основании с возможностью поворота, диафрагма и лимб измерителя горизонтальных углов размещены на несущем элементе, при этом диафрагма жестко закреплена на последнем, лимб связан с основанием посредством введенного гибкого в осевом направлении фланца, а конические опорные ролики установлены с возможностью перемещения вдоль своих осей.
Снабжение системы наведения выжимным диском с тремя равномерно расположенными по окружности кулачками, тремя толкателями, установленными в основании с возможностью осевого перемещения и торцевой зубчатой муфтой, одна из полумуфт которой закреплена на ведомом зубчатом колесе, а другая выполнена в виде трех равномерно расположенных по окружности зубчатых секторов, каждый из которых закреплен на основании с возможностью перемещения вдоль оси поворота и зацепления своими зубьями с зубьями полумуфты ведомого зубчатого колеса, при этом толкатели установлены с возможностью одновременного контактирования с зубчатыми секторами и с поверхностью кулачков, а выжимной диск установлен на основании с возможностью поворота, позволило значительно снизить момент сопротивления повороту приемопередающего блока и повысить плавность его перемещения при быстром перебросе с выключенным приводом наведения в горизонтальной плоскости, одновременно уменьшилось усилие, которое способствовало смещению опорных элементов системы наведения с треногой и приемопередающим блоком, а также треноги с грунтом. В результате уменьшилась ошибка измерения горизонтальных углов, что позволило оператору определять положение разрывов неуправляемых боеприпасов, не включая привод наведения в горизонтальной плоскости для плавного доворота прицельной марки приемопередающего блока. Размещение диафрагмы и лимба измерителя горизонтальных углов на несущем элементе, при котором диафрагма жестко закреплена на последнем, а лимб связан с основанием посредством введенного гибкого в осевом направлении фланца, позволило совместить ось поворота круговой направляющей с осями лимба и диафрагмы, что уменьшило влияние на измерение наличие эксцентриситета их положения, фиксация лимба относительно основания за счет гибкого в осевом направлении фланца позволила значительно уменьшить влияние неперпендикулярности расположения круговой направляющей относительно оси основания, т.к. исключен дополнительный разворот лимба по отношению к диафрагме на отдельных участках измерения, а выполнение опорных роликов с возможностью перемещения вдоль своих осей без снятия их с основания обеспечило из-за небольшого их угла конуса с высокой точностью регулировать положение оси круговой направляющей, не нарушая контакта роликов с последней, что в совокупности повысило точность измерения горизонтальных углов.
Зажимной механизм может быть выполнен в виде гибкой ленты с равномерно закрепленными на ее внутренней стороне тремя сухарями с V-образной поверхностью, предназначенной для контактирования с коническими поверхностями, выполненными на наружной части опорных элементов приемопередающего блока, системы наведения и треноги, при этом одна из лент с сухарями размещена на опорном элементе треноги, а другая - на опорном элементе системы наведения с возможностью самоустановки при взаимодействии с коническими поверхностями сопряженных опорных элементов составных частей ЛЦД.
Привод наведения в вертикальной плоскости может быть размещен на корпусе системы наведения с возможностью поворота и может включать ведущий винт и гайку, образующие винтовую пару, и устройство выбора зазора в резьбе последней, которое выполнено в виде двух дополнительных гаек, установленных соосно основной, при этом одна из них установлена также на ведущем винте с возможностью осевого перемещения относительно основной гайки без разворота, а вторая дополнительная гайка сопряжена с выполненной на наружной поверхности основной гайки резьбой с возможностью осевого перемещения и контактирования с торцевой поверхностью первой дополнительной гайки, причем поворотная платформа с закрепленной на ней осью и измерителем угла места связана с несущим элементом и основной гайкой привода наведения в вертикальной плоскости системы наведения, а опорный элемент, предназначенный для стыковки системы наведения с приемопередающим блоком установлен на указанной поворотной платформе.
Места соединения корпуса системы наведения с приводом наведения в вертикальной плоскости, а также поворотной платформы с несущим элементом и основной гайкой привода наведения в вертикальной плоскости могут быть выполнены в виде шаровых опор.
Узел герметизации системы наведения может быть выполнен в виде втулки с кольцевым выступом, расположенным симметрично на внутреннем диаметре, двух колец с наружными поверхностями ступенчатой формы и двух плоских кольцевых прокладок, причем два кольца с наружными поверхностями ступенчатой формы соединены по одному из торцов таким образом, что образуют между собой полость, в которой размещены кольцевой выступ втулки с зазором и две плоские кольцевые прокладки с возможностью одновременного контактирования с поверхностями ступенчатой формы обеих колец, с внутренним диаметром и торцевыми поверхностями кольцевого выступа втулки, а зазор между последним и указанной полостью двух колец заполнен смазкой, при этом одно из колец связано с корпусом, а втулка - с основанием и имеют возможность относительного поворота.
Выполнение зажимного механизма в виде гибкой ленты с равномерно закрепленными на ее внутренней стороне тремя сухарями с V-образной поверхностью, предназначенной для контактирования с коническими поверхностями, выполненными на наружной части опорных элементов приемопередающего блока, системы наведения и треноги, при этом одна из лент с сухарями размещена на опорном элементе треноги, а другая - на опорном элементе системы наведения с возможностью самоустановки при взаимодействии с коническими поверхностями сопряженных опорных элементов составных частей ЛЦЦ, позволяет оперативно соединять и разъединять составные части ЛЦЦ при создании на опорных элементах значительных сил сжатия в месте стыка, что повышает жесткость места стыка и соответственно влияет на точность наведения прицельной марки на цель и снижение погрешности измерения.
Размещение на корпусе системы наведения с возможностью поворота привода наведения в вертикальной плоскости, включающего ведущий винт и гайку, образующие винтовую пару, и устройство выбора зазора в резьбе последней, которое выполнено в виде двух дополнительных гаек, установленных соосно основной, при этом одна из них установлена также на ведущем винте с возможностью осевого перемещения относительно основной гайки без разворота, а вторая дополнительная гайка сопряжена с выполненной на наружной поверхности основной гайки резьбой с возможностью осевого перемещения и контактирования с торцевой поверхностью первой дополнительной гайки, причем поворотная платформа с закрепленной на ней осью и измерителем углов места связана с несущим элементом и основной гайкой привода наведения в вертикальной плоскости системы наведения, а опорный элемент, предназначенный для стыковки системы наведения с приемопередающим блоком установлен на указанной поворотной платформе, позволило повысить жесткость конструкции, плавность перемещения приемопередающего блока при наведении в вертикальной плоскости и тем самым повысить точность наведения на цель и уменьшить погрешность измерения.
Выполнение мест соединения корпуса системы наведения с приводом наведения в вертикальной плоскости, а также поворотной платформы с несущим элементом и основной гайкой привода наведения в вертикальной плоскости в виде шаровых опор, также позволило повысить общую жесткость конструкции, т.к. в этих местах по существу отсутствуют зазоры, что также влияет на точность наведения на цель и снижает погрешность измерения.
Выполнение узла герметизации системы наведения в виде втулки с кольцевым выступом, расположенным симметрично на внутреннем диаметре, двух колец с наружными поверхностями ступенчатой формы и двух плоских кольцевых прокладок, причем два кольца с наружными поверхностями ступенчатой формы соединены по одному из торцов таким образом, что образуют между собой полость, в которой размещены кольцевой выступ втулки с зазором и две плоские кольцевые прокладки с возможностью одновременного контактирования с поверхностями ступенчатой формы обеих колец, с внутренним диаметром и торцевыми поверхностями кольцевого выступа втулки, а зазор между последним и указанной полостью двух колец заполнен смазкой, при этом одно из колец связано с корпусом, а втулка - с основанием и имеют возможность относительного поворота, позволило при достаточной степени герметизации уменьшить силы сопротивления, возникающие, особенно при быстром перебросе, между неподвижным основанием и подвижным корпусом, т.к. втулка с кольцевым выступом находится в полости со смазкой и самоустанавливается относительно основания и плоских кольцевых прокладок, которые выполнены из фторопласта. К тому же, они образуют некоторый замок для смазки, который препятствует проникновению пыли и влаги во внутреннюю полость системы наведения.
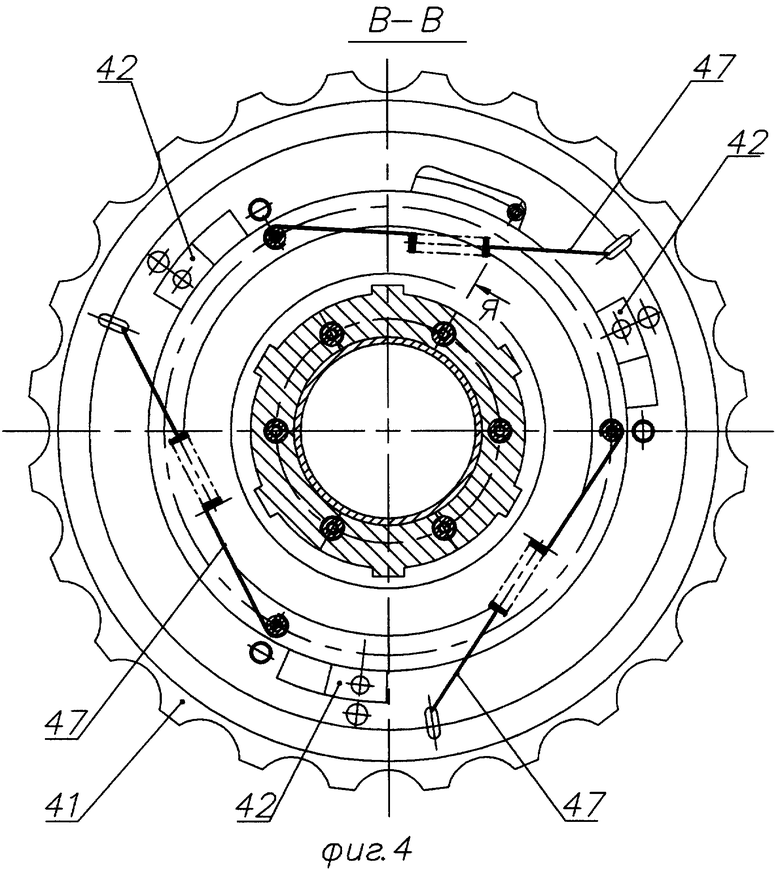
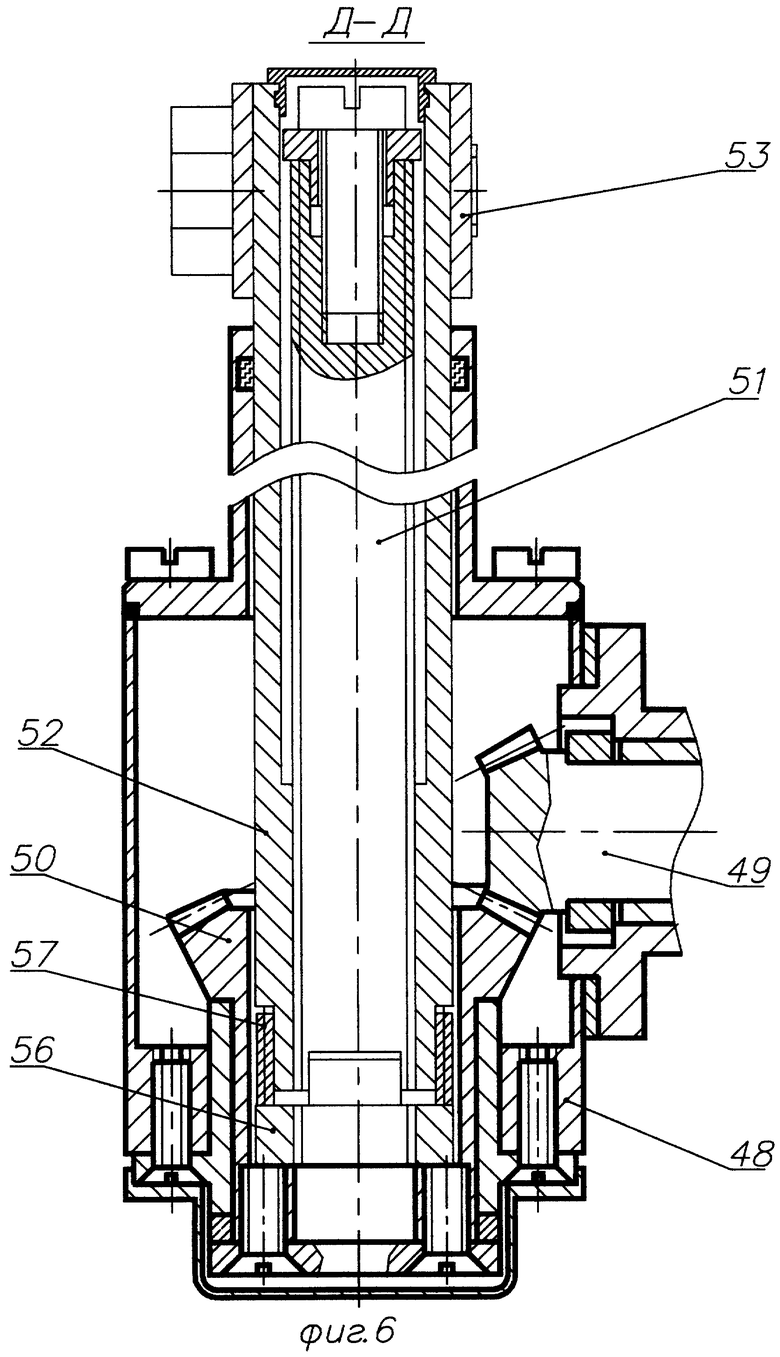
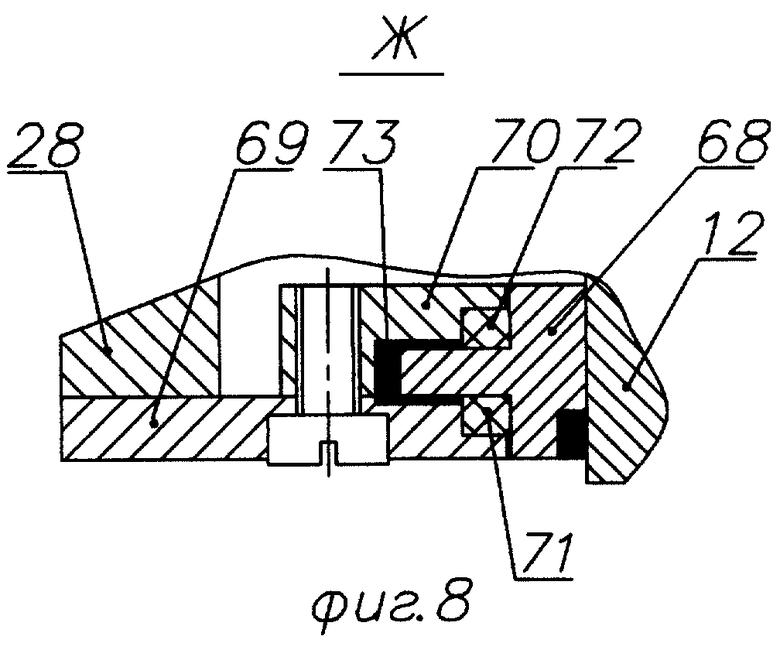
На фиг.1 показан общий вид ЛЦД, на фиг.2 показано сечение А-А на фиг.1 системы наведения, на фиг.3 показано сечение Б-Б на фиг.2, вид в плане на систему наведения, на фиг.4 показано сечение В-В на фиг.2 по выжимному диску, на фиг.5 показано сечение Г-Г на фиг.1, места соединения привода наведения в вертикальной плоскости с корпусом системы наведения, на фиг.6 показано сечение Д-Д на фиг.1 по винтовой паре привода наведения в вертикальной плоскости, на фиг.7 показано место Е на фиг.2 конструкции конического ролика в масштабе, на фиг.8 показано место Ж на фиг.2 конструкции узла герметизации в масштабе.
Лазерный целеуказатель-дальномер содержит приемопередающий блок 1 с оптическим визиром и прицельной маркой, треногу 2 и систему наведения 3, которые сопряжены между собой посредством опорных элементов 4, 5, 6, 7 и двух зажимных механизмов 8, 9. На приемопередающем блоке 1 закреплен опорный элемент 4, на системе наведения 3 - опорные элементы 5 и 6, а на треноге - опорный элемент 7. Система наведения 3 включает осевую систему, которая выполнена в виде несущего элемента 10 с круговой направляющей 11, трех равномерно расположенных на основании 12 конических роликов 13, оси с резьбовым концом, выполненных на опорном элементе 6, который жестко связан с основанием 12, при этом несущий элемент 10 сцентрирован относительно оси опорного элемента 6 с помощью подшипника 14 и поджат к коническим роликам 13 гайкой 15, размещенной на резьбовом конце опорного элемента 6. Ось вращения каждого конического ролика 13 пересекается с осью поворота несущего элемента 10 в точке, лежащей на плоскости, совпадающей с плоскостью круговой направляющей 11, контактирующей с коническими роликами 13. Т.к. линейные скорости каждой из контактирующих точек на круговой направляющей 11 и на конических роликах 13 равны, то их качение по круговой направляющей 11 происходит без скольжения. Конические ролики 13 установлены на основании 12 посредством опоры 16, двух направляющих втулок 17, кронштейна 18 и регулировочных прокладок 19. Опора 16 смонтирована на кронштейне 18 с возможностью поворота для самоустановки конического ролика 13 относительно круговой направляющей 11 и имеет винт 20, предназначенный для перемещения конического ролика 13 вдоль его оси. На противоположной стороне опоры 16 закреплена упругая пластина 21, предназначенная для перемещения конического ролика 13 в обратном направлении. На несущем элементе 10 размещен измеритель горизонтальных углов 22, включающий диафрагму 23, лимб 24 с фотоприемником 25 и светодиодом 26, при этом диафрагма 23 приклеена к несущему элементу 10, а лимб 24 имеет возможность поворота относительно последнего и закреплен на опорном элементе 6 посредством гибкого в осевом направлении, за счет выполнения круговых зигов, фланца 27. На несущем элементе 10 закреплены корпус 28 и опорный фланец 29. На последнем установлена с возможностью поворота посредством двух шаровых опор 30 и винтов 31 с коническими углублениями платформа 32 с осью 33 для установки измерителя углов места 34. На основании 12 с возможностью поворота размещено ведомое зубчатое колесо 35, находящееся в постоянном зацеплении с ведущей шестерней 36 привода наведения в горизонтальной плоскости 37, установленного на корпусе 28. На последнем также установлен посредством двух шаровых опор 38 и двух винтов 39 с коническими углублениями привод наведения в вертикальной плоскости 40. На основании 12 размещены с возможностью поворота выжимной диск 41 с тремя равномерно расположенными по окружности кулачками 42, три толкателя 43 с возможностью осевого перемещения и торцевая зубчатая муфта, одна из полумуфт 44 которой закреплена на ведомом зубчатом колесе 35, а другая выполнена в виде трех равномерно расположенных по окружности зубчатых секторов 45, каждый из которых закреплен на основании 12 с возможностью перемещения вдоль оси поворота несущего элемента 10 за счет плоской пружины 46 и зацепления своими зубьями с зубьями полумуфты 44, при этом толкатели 43 установлены с возможностью одновременного контактирования с зубчатыми секторами 45 и с поверхностью кулачков 42 выжимного диска 41. Для возврата выжимного диска в исходное положение между последним и основанием установлены пружины 47. Привод наведения в вертикальной плоскости 40 включает корпус 48, в котором смонтированы конические зубчатые колеса 49, 50 и винтовая передача, выполненная в виде винта 51 и гайки 52, на которой закреплен хомут 53. Платформа 32 связана с приводом наведения в вертикальной плоскости 40 через две шаровые опоры 54 и два винта 55. Винты 55 также выполнены с коническими углублениями. Винтовая передача привода наведения в вертикальной плоскости 40 снабжена устройством выбора зазора, которое выполнено в виде двух дополнительных гаек 56 и 57, установленных соосно основной гайке 52, причем одна из дополнительных гаек 56 находится в зацеплении с винтом 51 и имеет два выступа, которые сопряжены с двумя пазами, выполненными на торце основной гайки 52, а вторая дополнительная гайка 57 сопряжена с выполненной на наружной поверхности основной гайки 52 резьбовой поверхностью и имеет возможность относительного осевого перемещения и взаимодействия с торцевой поверхностью первой дополнительной гайки 56. Диафрагма 58 измерителя углов места 34 установлена на оси 33 без возможности относительного поворота, а лимб 59 установлен соосно диафрагме 58 с возможностью относительного поворота и зафиксирован относительно корпуса 28 и соответственно несущем элементе 10 посредством кронштейна 60 и двух винтов 61. Каждый из зажимных механизмов 8, 9 выполнен в виде гибкой ленты 62 с равномерно закрепленными на ее внутренней стороне тремя сухарями 63 с V-образной поверхностью на внутренней их стороне, предназначенной для контактирования с коническими поверхностями, выполненными на наружной части опорных элементов 4, 5, 6, 7 приемопередающего блока 1, системы наведения 3 и треноги 2. На одном конце гибкой ленты 62 установлен с возможностью поворота рычаг 64, а на другом - винт 65. На рычаге 64 с возможностью относительного поворота закреплен п-образный кронштейн 66, ось поворота которого смещена относительно оси поворота рычага 64. Винт 65 связан с п-образным кронштейном 66 гайкой 67. Зажимные механизмы 8 и 9 закреплены соответственно на платформе 32 и треноге 2. Узел герметизации внутренней полости системы наведения 3 выполнен в виде втулки 68 с кольцевым выступом, расположенным симметрично на внутреннем диаметре, двух колец 69 и 70 с наружными поверхностями ступенчатой формы и двух плоских кольцевых прокладок 71 и 72, причем два кольца 69 и 70 с наружными поверхностями ступенчатой формы соединены по одному из торцов таким образом, что образуют между собой полость, в которой размещены кольцевой выступ втулки 68 с зазором и две плоские кольцевые прокладки 71 и 72 с возможностью одновременного контактирования с поверхностями ступенчатой формы обеих колец 69 и 70, также с внутренним диаметром и торцевыми поверхностями кольцевого выступа втулки 68, а зазор между последним указанной втулки 68 и полостью образованной двумя кольцами 69 и 70 заполнен консистентной смазкой 73, при этом одно из колец 69 связано с корпусом 28, а втулка 68 - с основанием 12 и имеют возможность относительного поворота.
Лазерный целеуказатель-дальномер работает следующим образом
При развертывании ЛЦД на местности треногу 2 устанавливают на грунт и поворачивают рычаг 64 зажимного механизма 9 против часовой стрелки, давая возможность гибкой ленте 61 развести сухари 62 на достаточное расстояние, обеспечивающее свободное сопряжение опорных элементов 6 и 7. Соединяют систему наведения 3 с треногой 2, сопрягая их опорные элементы 6 и 7, и фиксируют с помощью зажимного механизма 9. Для этого рычаг 64 поворачивают по часовой стрелке. В связи с тем, что ось поворота п-образного кронштейна 66 смещена относительно оси поворота рычага 64, гибкая лента 62 с сухарями 63 стягивается вокруг опорных элементов 6 и 7. Сухари 63 своими v-образными поверхностями взаимодействуют с конусными поверхностями опорных элементов 6 и 7, центрируют и прижимают их друг к другу. Регулировка усилия зажима осуществляется гайкой 67. Свинчивая или навинчивая гайку 67 на винт 65 соответственно увеличивается или уменьшается исходный размер расположения сухарей 63. Таким же образом фиксируется приемопередающий блок 1 относительно системы наведения 3 зажимным механизмом 8 при сопряжении соответственно опорных элементов 4 и 5. Благодаря выполнению на опорных элементах 6, 7 и 5, 4 конусных поверхностей и V-образных поверхностей на сухарях 63 гибкой ленты 62 при их взаимодействии развивается большое усилие сжатия опорных элементов 6, 7 и 5, 4 друг к другу, что значительно снижает возможность люфта в этих соединениях и соответственно рассогласование показаний измерителя горизонтальных углов 22 с положением прицельной марки приемопередающего блока 1. Оператор наводит прицельную марку приемопередающего блока 1 на цель в вертикальной плоскости приводом наведения в вертикальной плоскости 40, а в горизонтальной - приводом наведения в горизонтальной плоскости 37. При плавном наведении от привода наведения в горизонтальной плоскости 37 ведомое зубчатое колесо 35 зафиксировано относительно основания 12, при этом зубья торцевых зубчатых полумуфт 44 и 45 находятся в зацеплении под действием усилия плоской пружины 46. Кулачки 42 выжимного диска 41 выведены из зоны взаимодействия с толкателями 43, а последние не взаимодействуют с зубчатыми секторами 45. Ведущая шестерня 36 привода наведения в горизонтальной плоскости 37 обкатывается вокруг ведомого зубчатого колеса 35 и соответственно корпус 28 с несущим элементом 10, платформой 32 и приемопередающим блоком 1 поворачиваются относительно основания 12 и треноги 2. При быстром перебросе, когда требуется определить место положение разрыва неуправляемого боеприпаса, оператор заранее поворачивает выжимной диск 41 по часовой стрелке на некоторый угол до упора, при этом его кулачки 42 взаимодействуют с толкателями 43 и перемещают их в сторону зубчатых секторов 45. Происходит расцепление зубьев обеих полумуфт 44 и 45. У ведомого зубчатого колеса 35 появляется возможность свободного вращения относительно основанием 12. В этом случае поворот приемопередающего блока 1 происходит без участия привода наведения в горизонтальной плоскости 37. Обеспечивается быстрое и плавное наведение на место разрыва. Оператор успевает замерить дальность измерить координаты разрыва до момента, пока облако от разрыва не рассеется. Для фиксации ведомого зубчатого колеса 35 относительно основания 12 достаточно оператору сдвинуть выжимной диск 41 против часовой стрелки, и он под действием пружин 47 повернется против часовой стрелки, обеспечивая вывод кулачков 42 из под толкателей 43. Последние опускаются и под действием плоской пружины 46 зубчатые сектора 45 зацепляются зубчатой полумуфтой 44 ведомого зубчатого колеса 35, фиксируя его относительно основания 12. Регулировка положения оси поворота несущего элемента 10 относительно оси опорного элемента 6 состоит из двух этапов. Первый этап грубой регулировки производится в момент сборки системы наведения 3, когда выставляется одинаковый размер от плоскости опорного элемента 6 до образующей конических роликов 13 за счет подбора прокладок 19 между основанием 12 и кронштейном 18. При этом несущий элемент 10 необходимо выводить из контакта с коническими роликами 13. Точность такой регулировки не превышает 0,03 мм. Второй этап регулировки производится в собранной системе наведения 3, когда через окна в корпусе 28 осуществляется тонкая регулировка положения оси поворота несущего элемента 10 за счет перемещения конических роликов 13 вдоль их оси винтами 20, а в обратном направлении упругой пластиной 21. В этом случае конические ролики 13 находятся в постоянном контакте с основанием 12 и несущим элементом 10 за счет гайки 15 и подшипника 14. Такая регулировка обеспечивает точность выставки не хуже 0,005 мм, при этом она очень проста. Размещенные на несущем элементе 10 диафрагма 23 и лимб 24 измерителя горизонтальных углов 22 при относительном их повороте в любом положении не имеют дополнительного разворота, т.к., во-первых, они находятся непосредственно на несущем элементе 10, а, во-вторых, лимб связан с основанием 12 гибким в осевом направлении фланцем 27, который обеспечивает как мембрана деформацию только вдоль оси поворота при отсутствии относительного поворота. Т.е в момент поворота несущего элемента 10 измеритель горизонтальных углов 22 считывает истинный угол поворота приемопередающего блока 1. Перемещение приемопередающего блока 1 в вертикальной плоскости осуществляется от привода наведения в вертикальной плоскости 40, при этом вращение через конические зубчатые колеса 49, 50 передается винту 51 и гайке 52. Винтовая передача имеет устройство выбора зазора в резьбе, которое работает следующим образом. При сборке винтовой передачи предварительно на гайку 52 навинчивается вторая дополнительная гайка 57, а первая дополнительная гайка 56 своими выступами вставляется в пазы основной гайки 52 таким образом, чтобы одновременно совпал заход винтовой линии винта 51 с заходом на первой дополнительной гайке 56 и основной гайке 52. Вворачивают винт 51 одновременно в обе гайки 52 и 56. Поворачивая вторую дополнительную гайку 57 против часовой стрелки, ее торец, контактируя с торцом первой дополнительной гайки 56, смещает последнюю вдоль оси винта 51 относительно основной гайки 52 до выбора зазора в резьбе между винтом 51 и основной гайкой 52. На последней закреплен хомут 53, который через шаровые опоры 54 передает движение платформе 32. В зависимости от направления вращения винта 51 гайка 52 или навинчивается на винт 51 или свинчивается с него. При этом платформа 32 и корпус 48 привода наведения в вертикальной плоскости 40 поворачиваются в шаровых опорах 30 и 38 соответственно. Зазоры во всех шаровых опорах 30, 38 и 54 выбираются с помощью соответствующих винтов 31, 39 и 55. Вместе с платформой 32 поворачиваются ось 33 и диафрагма 58 относительно лимба 59 измерителя углов места 34. Происходит считывание угла поворота приемопередающего блока 1 в вертикальной плоскости. Узел герметизации при установке центрируется по наружному диаметру основания 12. Кольцо 69 соединяется с корпусом 28, при этом втулка 68 перемещается по наружному диаметру основания 12 и занимает положение, обеспечивающее свободное вращение втулки 68 относительно двух колец 69 и 70. В этом положении втулка 68 приклеивается по периметру к основанию 12 герметиком. Кольцо 69 также по периметру герметизируется относительно корпуса 28. Таким образом, для проникновения пыли и влаги во внутреннюю полость системы наведения необходимо преодолеть минимальные зазоры между плоскими кольцевыми прокладками 71 и 72 и далее полость, заполненную консистентной смазкой 73. Наличие двух плоских кольцевых прокладок 71 и 72 из фторопласта обеспечивает центрирование кольцевого выступа втулки 68 относительно ступенчатой полости, образованной двумя кольцами 69 и 70 и минимальное сопротивление повороту, что положительно влияет на общее сопротивление, особенно при быстром перебросе приемопередающего блока 1, и соответственно снижает общую ошибку рассогласования показаний измерителя горизонтальных углов.
Источники информации
1. Лазерный целеуказатель-дальномер 1Д15. Техническое описание и инструкция по эксплуатации ет 1.040.000 ТО.
2. Лазерный целеуказатель-дальномер ЛЦД-2. Техническое описание и инструкция по эксплуатации ет 1.040.011 ТО. 1995 г. Стр.1-9, 21-25, 29, 30, 33, 36-38, 42-45, 107, 108, 128, 129, 134-136; Чертежи: ет 1.040.011 МЧ - монтажный чертеж, ет 2.379.007 СБ - система наведения (сборочный чертеж). - прототип.
| название | год | авторы | номер документа |
|---|---|---|---|
| Лазерный целеуказатель-дальномер | 2022 |
|
RU2791164C1 |
| ЛАЗЕРНЫЙ ЦЕЛЕУКАЗАТЕЛЬ-ДАЛЬНОМЕР | 2012 |
|
RU2522784C1 |
| ЛАЗЕРНЫЙ ЦЕЛЕУКАЗАТЕЛЬ-ДАЛЬНОМЕР | 2017 |
|
RU2665352C1 |
| СПОСОБ ОЦЕНКИ ТРЕНИРОВАННОСТИ ОПЕРАТОРА ЛАЗЕРНОГО ЦЕЛЕУКАЗАТЕЛЯ-ДАЛЬНОМЕРА | 1996 |
|
RU2098757C1 |
| ЛАЗЕРНЫЙ ЦЕЛЕУКАЗАТЕЛЬ-ДАЛЬНОМЕР | 2013 |
|
RU2535240C1 |
| Комплект носимой аппаратуры топогеодезической привязки и формирования целеуказаний | 2017 |
|
RU2661676C1 |
| ВЫСОКОТОЧНАЯ КОМПЛЕКСНАЯ ТАКТИЧЕСКАЯ РАКЕТНАЯ УСТАНОВКА БЛИЖНЕГО ДЕЙСТВИЯ | 2015 |
|
RU2642019C2 |
| СПОСОБ АВТОНОМНОЙ ОТРАБОТКИ СИСТЕМЫ ПОЛУАКТИВНОГО САМОНАВЕДЕНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2333449C1 |
| СПОСОБ СТРЕЛЬБЫ УПРАВЛЯЕМЫМ СНАРЯДОМ С ЛАЗЕРНОЙ ПОЛУАКТИВНОЙ ГОЛОВКОЙ САМОНАВЕДЕНИЯ | 2005 |
|
RU2300726C1 |
| УЧЕБНЫЙ ДАЛЬНОМЕР | 2006 |
|
RU2338144C2 |




Изобретение относится к военной технике, к аппаратуре лазерного целеуказания и дальнометрии. Лазерный целеуказатель-дальномер, содержит приемопередающий блок с оптическим визиром и прицельной маркой, треногу и систему наведения. Система наведения снабжена выжимным диском с тремя кулачками, тремя толкателями, торцевой зубчатой муфтой. Толкатели установленны в основании с возможностью осевого перемещения. Одна из полумуфт зубчатой муфты закреплена на ведомом зубчатом колесе. Другая полумуфта выполнена в виде трех равномерно расположенных по окружности зубчатых секторов. Каждый из зубчатых секторов закреплен на основании. Толкатели установлены с возможностью одновременного контактирования с зубчатыми секторами и с поверхностью кулачков. Выжимной диск установлен на основании с возможностью поворота. Диафрагма и лимб измерителя горизонтальных углов размещены на несущем элементе. Лимб связан с основанием посредством введенного гибкого в осевом направлении фланца. Конические опорные ролики установлены с возможностью перемещения вдоль своей оси. Технический результат - повышение точности измерении угловых координат положения цели при плавном наведении и быстром перебросе в горизонтальной плоскости приемопередающего блока при оперативном определении места и измерении координат разрывов неуправляемых боеприпасов. 4 з.п. ф-лы, 8 ил.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |

