Изобретение относится к военной технике, а именно к аппаратуре лазерного целеуказания и дальнометрии.
Известны лазерные целеуказатели-дальномеры (ЛЦД), предназначенные для визуальной разведки целей на местности, измерения дальности и угловых координат целей и лазерного целеуказания [1]. Недостатком известного ЛЦД является невозможность развертывания на местности со сложным рельефом. Наиболее близким по технической сущности к предлагаемому устройству является лазерный целеуказатель-дальномер, описанный в [2]. Указанный ЛЦД содержит приемопередатчик, в корпусе которого расположены приемно-визирный и излучающий каналы, систему наведения с приводами поворота платформы вокруг вертикальной и горизонтальной осей и измерителями горизонтального угла и угла места, блок питания и треногу, включающую стол с механизмом зажима для установки и закрепления системы наведения с приемопередатчиком, опорный элемент, на котором закреплены одним концом с возможностью независимого поворота три ноги и три тяги, при этом каждая тяга одновременно связана противоположным концом с одной из ног треноги с возможностью перемещения вдоль последней, а каждая нога снабжена опорным подпятником с возможностью поворота в трех плоскостях.
В известном ЛЦД отсутствует возможность развертывания на местности со сложным рельефом, а также на поверхностях в виде наклонной или вертикальной стены, бронетехнике, а также стволах деревьев. Особенно это актуально при развертывании ЛЦД в горной местности.
Задачей настоящего изобретения является расширение возможности применения ЛЦД независимо от рельефа местности.
Указанная задача решается за счет того, что в известном лазерном целеуказателе-дальномере, включающим приемопередатчик, в корпусе которого расположены приемно-визирный и излучающий каналы, систему наведения с приводами поворота платформы вокруг вертикальной и горизонтальной осей и измерителями горизонтального угла и угла места, блок питания и треногу, включающую стол с механизмом зажима для установки и закрепления системы наведения с приемопередатчиком, опорный элемент, на котором закреплены одним концом с возможностью независимого поворота три ноги и три тяги, при этом каждая тяга одновременно связана противоположным концом с одной из ног треноги с возможностью перемещения вдоль последней, а каждая нога снабжена опорным подпятником с возможностью поворота в трех плоскостях, ЛЦД снабжен цепью, талрепом, якорем, карабином и шурупом с петлей, опорный элемент треноги выполнен с шаровой направляющей и возможностью крепления цепи, при этом стол с зажимным устройством установлен на шаровой направляющей с возможностью поворота на 360° и наклона на угол до 90° и фиксацией относительно последней, а талреп одним своим концом в виде крюка предназначен для зацепления с любым звеном цепи, а другим концом посредством карабина с якорем, предназначенным для крепления в расщелине, например, горной местности или трещине в стене, или карабином, предназначенным для крепления за предмет типа петля, ручка, скоба, или шурупом с петлей, предназначенным для крепления на любой наклонной или вертикальной деревянной поверхности.
Снабжение ЛЦД цепью, талрепом, якорем, карабином и шурупом с петлей и выполнение опорного элемента треноги с шаровой направляющей и возможностью крепления цепи, а также размещение стола с зажимным устройством на шаровой направляющей опорного элемента с возможностью поворота на 360° и наклона на угол до 90° и фиксацией относительно последней, при этом талреп одним своим концом в виде крюка предназначен для зацепления с любым звеном цепи, а другим концом посредством карабина или с якорем, предназначенным для крепления в расщелине поверхности, например, горной местности или трещине в стене, или карабином, предназначенным для крепления за предмет типа петля, ручка, скоба, или шурупом с петлей, предназначенным для крепления на любой наклонной или вертикальной деревянной поверхности, при этом фиксация треноги обеспечивается натяжением цепи с помощью талрепа, позволило устанавливать треногу с системой наведения и приемопередатчиком на любой сложной поверхности в виде наклонной или вертикальной стене, бронетехнике, а также стволах деревьев и поверхностях в горной местности, что расширяет возможность развертывания ЛЦД со сложным рельефом местности.
На фиг. 1 показан общий вид ЛЦД.
На фиг. 2 показан общий вид треноги.
На фиг. 3 показан вариант развертывания ЛЦД при использовании якоря в расщелине со сложным рельефом местности.
На фиг. 4 показан вариант развертывания ЛЦД при использовании шурупа с петлей на вертикальной деревянной поверхности.
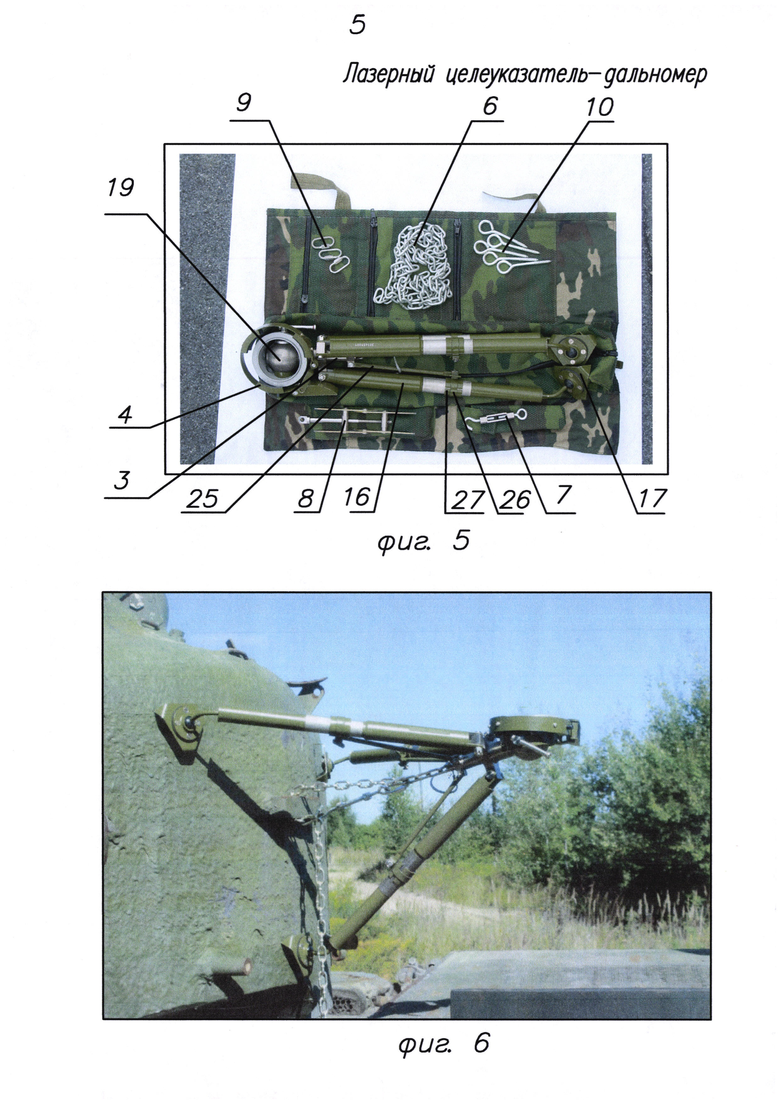
На фиг. 5 представлена фотография треноги с комплектом крепления на местности.
На фиг. 6 представлена фотография размещения треноги для ЛЦД на башне бронетехнике.
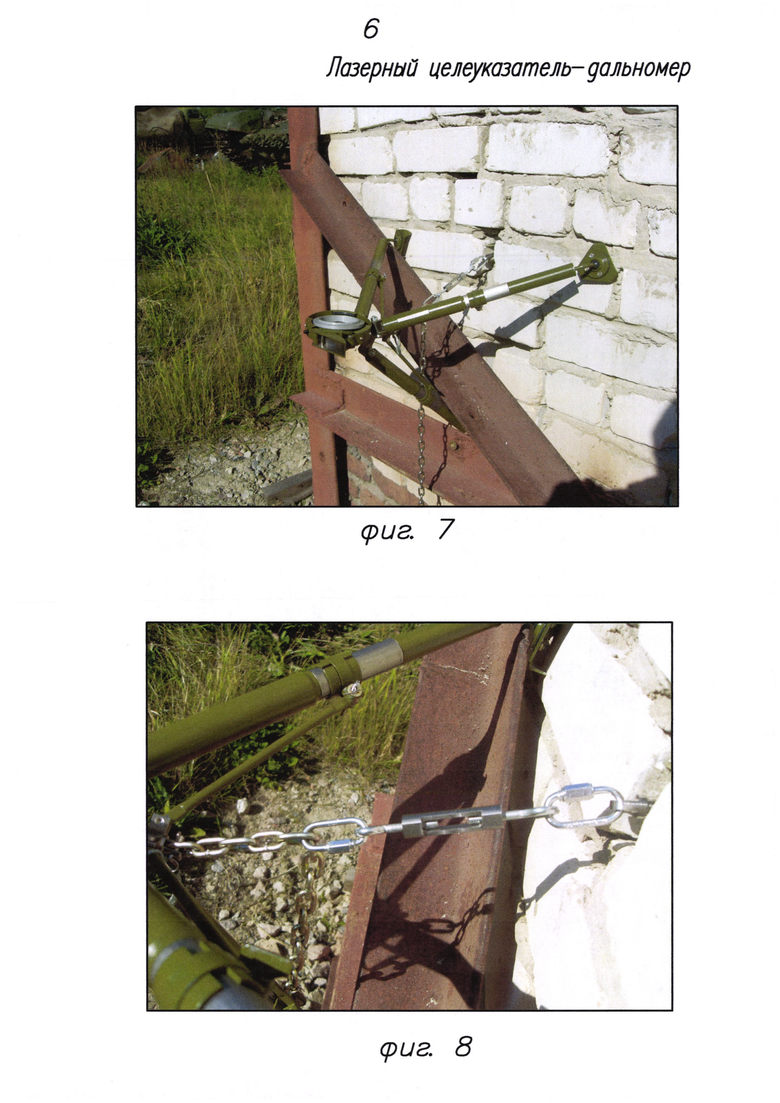
На фиг. 7 представлена фотография размещения треноги для ЛЦД на вертикальной кирпичной стене с использованием якоря и карабинов.
На фиг. 8 представлена фотография места соединения талрепа с цепью и якорем посредством карабинов.
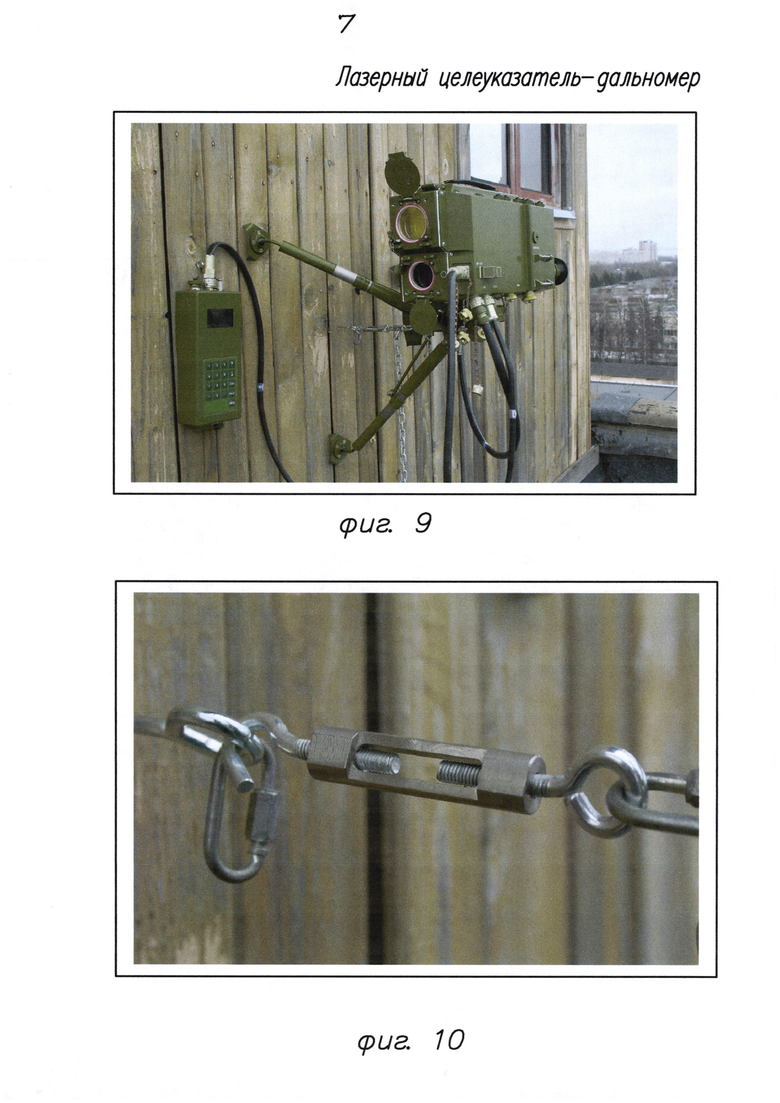
На фиг. 9 представлена фотография размещения ЛЦД на вертикальной деревянной стене с использованием шурупа с петлей.
На фиг. 10 представлена фотография места соединения талрепа с цепью посредством карабина и шурупа с петлей при креплении треноги на вертикальной деревянной стене.
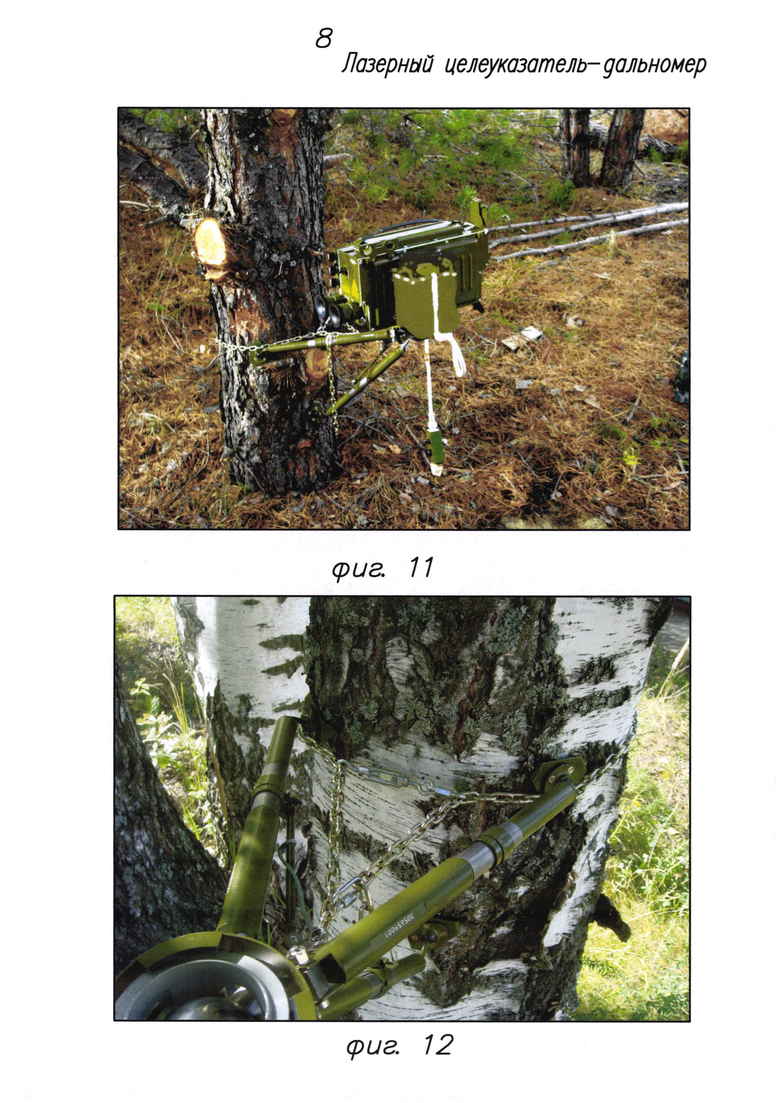
На фиг. 11 представлена фотография размещения треноги с приемопередатчиком на стволе дерева.
На фиг. 12 представлена фотография варианта размещения треноги на стволе дерева с использованием цепи, карабина и талрепа.
Лазерный целеуказатель-дальномер содержит приемопередатчик 1, систему наведения 2, треногу 3, сопряженные между собой и зафиксированные посредством двух зажимных элементов 4, 5, а также цепь 6, талреп 7, якорь 8, карабин 9 и шуруп с петлей 10. Приемопередатчик 1 включает приемно-визирный канал 11, излучающий канал 12, опору 13 для стыковки с платформой 14 системы наведения 2, которая снабжена приводами поворота платформы 14 вокруг вертикальной и горизонтальной осей и измерителями горизонтального угла и угла места. Тренога 3 включает стол 15 с зажимным элементом 4, три ноги 16, на конце каждой из которых расположены опорные подпятники 17 с возможностью поворота в трех плоскостях, опорный элемент 18 с шаровой направляющей 19, причем стол 15 с зажимным элементом 4 установлен на шаровой направляющей 19 с возможностью поворота на 360° и наклона на угол до 90° за счет двух вырезов 20 и фиксацией относительно последней посредством двух губок 21 с конической поверхностью и винтового зажима 22. На противоположном шаровой направляющей 19 конце опорного элемента 18 расположен держатель 23 с прорезью под звено цепи 6 и шплинт 24 для крепления последней относительно опорного элемента 18. Ноги 16 треноги 3 и тяги 25 закреплены на опорном элементе 18 с возможностью изменения угла наклона к оси последнего, причем каждая тяга 25 одновременно связана с одной из ног 16 треноги 3 посредством хомута 26 и двух вкладышей 27 с возможностью перемещения вдоль ноги 16 и фиксации винтом 28, при этом талреп 7 одним своим концом в виде крюка предназначен для зацепления с любым звеном цепи 6, а другим посредством карабина - с или якорем 8, предназначенным для крепления в расщелине, например, горной местности или трещине в стене, или карабином 9, предназначенным для крепления за выступающий элемент на поверхности бронетехники типа петля, ручка, скоба, или шурупом с петлей 10, предназначенным для крепления на любой наклонной или вертикальной деревянной поверхности.
При развертывании ЛЦД на сложной наклонной или вертикальной поверхности, например, в горной местности, имеющей расщелину или кирпичной стене с трещиной, используют якорь 8. Цепь 6 крайним звеном заводится в прорезь держателя 23 опорного элемента 18 треноги 3 и фиксируется шплинтом 24. Якорь 8 устанавливают в расщелине или трещине в стене и с помощью винтовой пары производят разведение его лап, фиксируя последний. Якорь 8 с помощью карабина 9 соединяют с одним из концов талрепа 7. Ноги 16 треноги 3 разводят таким образом, чтобы ось опорного элемента 18 и ось якоря 8 примерно составляла общую прямую, а опорные подпятники 17 касались опорной поверхности. В таком положении тяги 25 фиксируются на ногах 16 треноги 3 вкладышами 27 посредством хомута 26 и винта 28. Другой конец талрепа 7 в виде крюка зацепляют с ближайшим звеном цепи 6 при ее предварительном натяжении от руки. Вращая корпус талрепа 7, обеспечивают натяжение цепи 6 прижимая треногу 3 к опорной поверхности. Стол 15 треноги 3 поворачивают на шаровой направляющей 19, совмещая один из вырезов 20 с осью опорного элемента 18 и наклоняют, чтобы последний вошел в вырез 20 до горизонтального положения. В этом положении стол 15 фиксируют относительно шаровой направляющей 19 опорного элемента 18 винтовыми зажимами 22 и двух губок 21. На стол 15 треноги 3 устанавливают приемопередатчик 1 или систему наведения 2 с приемопередатчиком 1 в зависимости от выполнения поставленной задачи и фиксируют их зажимными элементами 4, 5. ЛЦД готов к работе.
При развертывании ЛЦД на наклонной или вертикальной деревянной поверхности используют шуруп с петлей 10 вместо якоря 8 и производят те же операции.
При развертывании ЛЦД на сложной поверхности, например, башне бронетехники или дереве все операции повторяются, но вместо шурупа с петлей 10 или якоря 8 используется талрепом 7 и карабин 9, с помощью которого цепь 6 крепится за любой выступающий элемент, например, скоба, петля, ручка и т.п.на поверхности бронетехники. В случае развертывания ЛЦД на стволе дерева выполняется обхват последнего цепью 6 с использованием талрепа 7 и карабина 9.
Источники информации
1. Лазерный целеуказатель-дальномер, Патент РФ №2269093 от 27.01.2006 г. с приоритетом от 07.07.2004 г.
2. Лазерный целеуказатель-дальномер, Патент РФ №2522784 от 21.05.2014 г. с приоритетом от 19.12.2012 г. – прототип.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛАЗЕРНЫЙ ЦЕЛЕУКАЗАТЕЛЬ-ДАЛЬНОМЕР | 2012 |
|
RU2522784C1 |
| Лазерный целеуказатель-дальномер | 2022 |
|
RU2791164C1 |
| ЛАЗЕРНЫЙ ЦЕЛЕУКАЗАТЕЛЬ-ДАЛЬНОМЕР | 2004 |
|
RU2269093C1 |
| ЛАЗЕРНЫЙ ЦЕЛЕУКАЗАТЕЛЬ-ДАЛЬНОМЕР | 2013 |
|
RU2535240C1 |
| ЛАЗЕРНЫЙ ЦЕЛЕУКАЗАТЕЛЬ-ДАЛЬНОМЕР | 2013 |
|
RU2539773C1 |
| ВЫСОКОТОЧНАЯ КОМПЛЕКСНАЯ ТАКТИЧЕСКАЯ РАКЕТНАЯ УСТАНОВКА БЛИЖНЕГО ДЕЙСТВИЯ | 2015 |
|
RU2642019C2 |
| Комплект носимой аппаратуры топогеодезической привязки и формирования целеуказаний | 2017 |
|
RU2661676C1 |
| Лазерный дальномер с сумматором зондирующих пучков | 2016 |
|
RU2621476C1 |
| СИСТЕМА ФОРМИРОВАНИЯ И НАВЕДЕНИЯ ЛАЗЕРНОГО ИЗЛУЧЕНИЯ ИЗЛУЧАТЕЛЕЙ С ОПТОВОЛОКОННЫМИ ВЫВОДАМИ НА ЦЕЛЬ | 2022 |
|
RU2793613C1 |
| СИСТЕМА ФОРМИРОВАНИЯ И НАВЕДЕНИЯ ЛАЗЕРНОГО ИЗЛУЧЕНИЯ ИЗЛУЧАТЕЛЕЙ С ОПТОВОЛОКОННЫМИ ВЫВОДАМИ НА ЦЕЛЬ | 2022 |
|
RU2785768C1 |
Изобретение относится к военной технике, а именно к аппаратуре лазерного целеуказания и дальнометрирования. Лазерный целеуказатель-дальномер (далее ЛЦД) содержит приемопередатчик 1, в корпусе которого расположены приемно-визирный 11 и излучающий 12 каналы, систему наведения 2 с приводами поворота платформы 14 вокруг вертикальной и горизонтальной осей и измерителями горизонтального угла и угла места, блок питания, треногу 3, цепь 6, талреп 7, якорь 8, карабин 9 и шуруп с петлей 10, причем опорный элемент 18 треноги 3 выполнен с шаровой направляющей 19 и возможностью крепления цепи 6, при этом стол 15 с зажимным устройством 4 установлен на шаровой направляющей 19 с возможностью поворота на 360° и наклона на угол до 90° и фиксацией относительно последней, при этом талреп 7 одним своим концом в виде крюка предназначен для зацепления с любым звеном цепи 6, а другим концом посредством карабина 9 - с якорем 8 или шурупом с петлей 10. Технический результат изобретения состоит в расширении возможности применения ЛЦД при развертывании на местности, не зависящей от рельефа. 12 ил.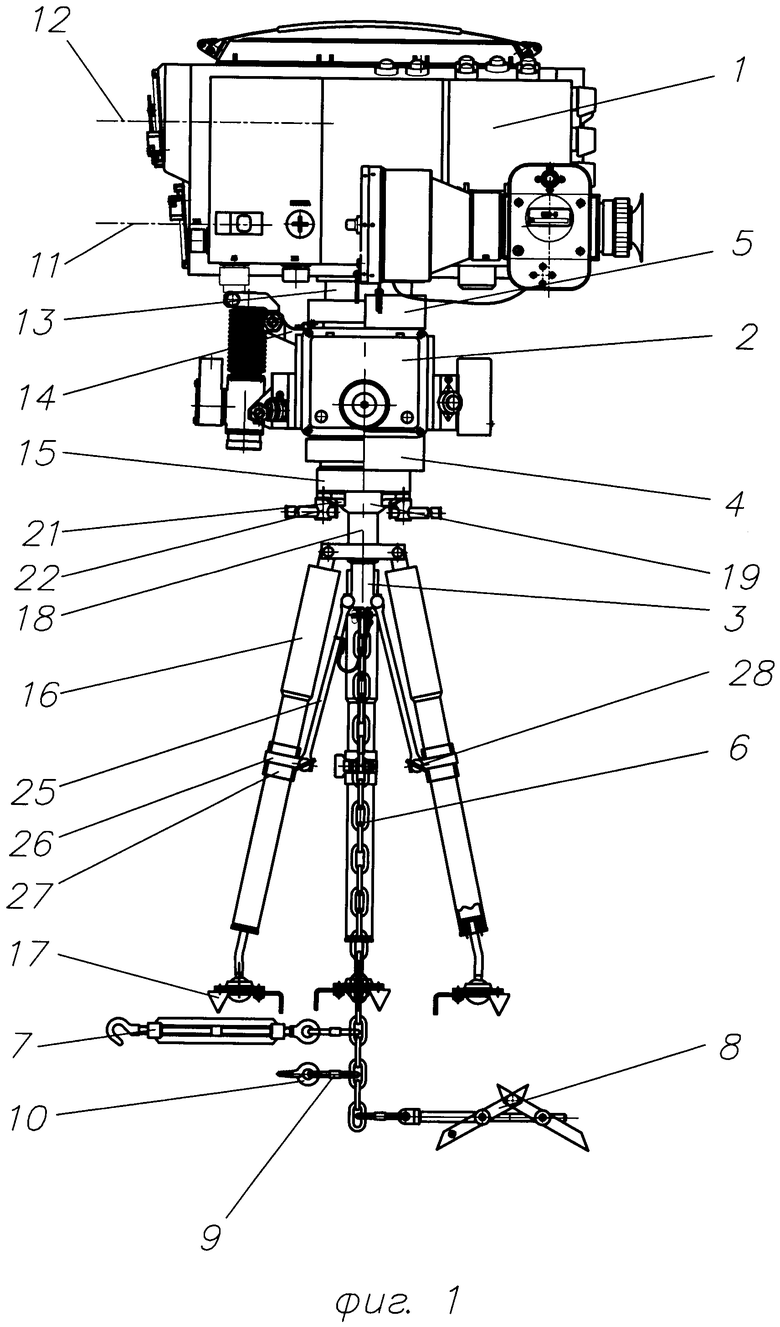
Лазерный целеуказатель-дальномер, содержащий приемопередатчик, в корпусе которого расположены приемно-визирный и излучающий каналы, систему наведения с приводами поворота платформы вокруг вертикальной и горизонтальной осей и измерителями горизонтального угла и угла места, блок питания и треногу, включающую стол с механизмом зажима для установки и закрепления системы наведения с приемопередатчиком, опорный элемент, на котором закреплены одним концом с возможностью независимого поворота три ноги и три тяги, при этом каждая тяга одновременно связана противоположным концом с одной из ног треноги с возможностью перемещения вдоль последней, а каждая нога снабжена опорным подпятником с возможностью поворота в трех плоскостях, отличающийся тем, что лазерный целеуказатель-дальномер снабжен цепью, талрепом, якорем, карабином и шурупом с петлей, опорный элемент треноги выполнен с шаровой направляющей и возможностью крепления цепи, при этом стол с зажимным устройством установлен на шаровой направляющей с возможностью поворота на 360° и наклона на угол до 90° и фиксацией относительно последней, а талреп одним своим концом в виде крюка предназначен для зацепления с любым звеном цепи, а другим концом посредством карабина - с якорем или шурупом с петлей.
| ЛАЗЕРНЫЙ ЦЕЛЕУКАЗАТЕЛЬ-ДАЛЬНОМЕР | 2012 |
|
RU2522784C1 |
| ЛАЗЕРНЫЙ ЦЕЛЕУКАЗАТЕЛЬ-ДАЛЬНОМЕР | 2004 |
|
RU2269093C1 |
| CN 103234516 A, 07.08.2013 | |||
| ДОПОЛНИТЕЛЬНЫЙ КОРПУС ДЛЯ КРЕПЛЕНИЯ ДАЛЬНОМЕРА | 1999 |
|
RU2210732C2 |
| Светопроекционный дальномер | 1983 |
|
SU1080013A1 |

