Изобретение относится к области радионавигации, а именно к способам расширения спектра навигационных радиосигналов спутниковых навигационных систем, и может быть использовано при создании и совершенствовании навигационной аппаратуры системы ГЛОНАСС, предназначенной для передачи навигационных сигналов с частотным и кодовым разделением.
Из уровня техники, в частности из описания устройства для обработки навигационных сигналов ГЛОНАСС, GPS и ГАЛИЛЕО (см. RU 2435307 С1, опубл. 27.11.2011), известен способ использования меандровой поднесущей модуляции.
Недостатком данного способа является то, что он обеспечивает прием сигнала, а не его передачу, как в заявляемом способе.
Из уровня техники известны способы расширения полосы, в которых применяется модуляция меандровой поднесущей частоты, например, способ формирования сигналов навигационной спутниковой системы (см. RU 2432674 С2, опубл. 27.10.2011), который обеспечивает общую спектральную плотность мощности PSD для сигналов каждой спутниковой навигационной системы в диапазоне L1 RNSS (радионавигационная спутниковая служба). Для этого генерируют сигнал модуляции, содержащий объединение, по меньшей мере, двух сигналов модуляции, например, сигналов ВОС или их производных, имеющих части (элемент сигнала или несколько элементов сигнала) с соответствующими относительными фазами или состояниями {++, --} и {+-, -+}, выбранными так, чтобы среднее значение множества упомянутых частей, по меньшей мере, уменьшало кросс-спектральные составляющие сложного спектра.
Недостатком указанного способа является то, что он обеспечивает передачу сигнала только в одном из диапазонов, а именно диапазоне L1.
Наиболее близким по технической сущности к заявляемому изобретению (прототипом) является способ расширения полосы навигационных сигналов ГЛОНАСС с помощью меандровой поднесущей модуляции (см. RU 2663807 С1, опубл. 10.08.2018). Известный способ заключается в том, что формируют сигнал меандровой последовательности поднесущей частоты путем модуляции BOC-сигнала или DuoBOC-сигнала на несущей частоте, позволяющей разместить группы главных лепестков спектра в выделенных для сигналах системы ГЛОНАСС частотных диапазонах, обеспечивают прием главных лепестков спектра по отдельности одновременно в двух частотных диапазонах в любом сочетании из диапазонов L1, L2, L3.
Недостатком известного способа является относительно низкое качество приема навигационного сигнала на фоне помех естественного и искусственного происхождения, так как широкополосные сигналы формируют на фиксированных номиналах несущих частот, при фиксированных значениях коэффициентов отношения поднесущей частоты и частоты дальномерного кода, что приводит к относительно низкой помехоустойчивости приема навигационных сигналов и к недостаточно эффективному использованию частотных диапазонов ГЛОНАСС L1, L2, L3.
Техническим результатом заявляемого изобретения является повышение качества приема навигационного сигнала на фоне помех естественного и искусственного происхождения путем формирования сигналов в широкой полосе и рациональным размещением главных максимумов спектров широкополосных сигналов в выделяемых для основных сигналов системы ГЛОНАСС частотных диапазонах.
Технический результат достигается тем, что в известном способе расширения полосы навигационных сигналов ГЛОНАСС с помощью меандровой поднесущей модуляцией с различными значениями коэффициента кратности меандровых импульсов, заключающийся в том, что формируют сигнал меандровой последовательности поднесущей частоты путем модуляции на несущей частоте с использованием ВОС-сигнала, позволяющей в результате такой модуляции разместить группы главных лепестков спектра в выделенных для сигналов системы ГЛОНАСС частотных диапазонах, обеспечивают прием основных навигационных сигналов системы ГЛОНАСС одновременно в двух частотных диапазонах в любом сочетании из диапазонов L1, L2, L3, дополнительно назначают номиналы несущих частот ƒ0 L2-L1, ƒ0 L3-L2, ƒ0 L3-L1 и диапазон изменения числовых значений для коэффициентов меандровой модуляции радиосигналов m, n для каждой из несущих частот ƒ0 L2-L1, ƒ0 L3-L2, ƒ0 L3-L1 таким образом, чтобы главные лепестки спектра BOC-сигнала на несущих частотах были расположены в частотных диапазонах L2-L1, L3-L2 и L3-L1 системы ГЛОНАСС. Устанавливают время работы на одной частоте Тƒ из перечня разрешенных ƒ0 L2-L1, ƒ0 L3-L2, ƒ0 L3-L1. Задают время работы модулятора BOC-сигналов Tn с одним номиналом значения коэффициента отношения частоты следования символов дальномерного кода ƒдк к опорной синхрочастоте - n из перечня разрешенных, соответствующих выбранной несущей частоте, задают время работы модулятора BOC-сигналов Tm с одним номиналом значения коэффициента отношения поднесущей частоты ƒм к опорной (базовой) синхрочастоте - m из перечня разрешенных, соответствующих выбранной несущей частоте. Формируют программу псевдослучайного изменения номинала несущей частоты из назначенных ƒ0 L2-L1, ƒ0 L3-L2, ƒ0 L3-L1. Формируют программу псевдослучайного изменения значений коэффициентов меандровой модуляции радиосигналов m, n из числового диапазона соответствующего назначенной несущей частоте ƒ0 L2-L1, ƒ0 L3-L2, ƒ0 L3-L1.
Сопоставительный анализ заявляемого решения с прототипом показывает, что предлагаемый способ отличается от известного использования метода программной перестройки радиочастоты несущего колебания навигационного радиосигнала и применении псевдослучайного закона изменения значений коэффициентов m, n при формировании ВОС(m, n) сигналов.
Благодаря новой совокупности существенных признаков в способе реализована возможность формирования сигналов с меандровой поднесущей модуляцией на псевдослучайных рабочих частотах и псевдослучайным законом назначения номиналов значений, коэффициентов m, n, чем и достигается повышение качества приема навигационного сигнала на фоне помех естественного и искусственного происхождения за счет формирования сигналов в широкой полосе и рациональным размещением их главных максимумов спектров широкополосных сигналов в выделяемых для основных сигналов системы ГЛОНАСС частотных диапазонах.
Заявленный способ поясняется чертежами, на которых показано:
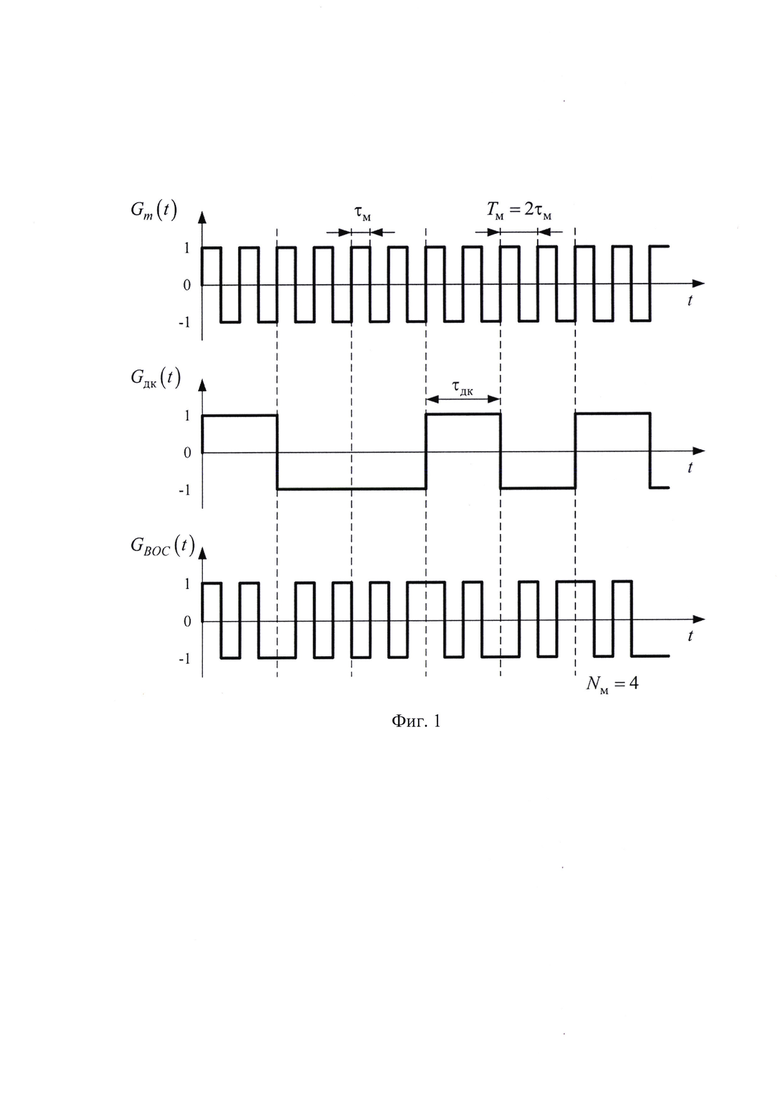
фиг. 1 - графики меандрового поднесущего колебания, ПСП дальномерного кода и функция амплитудной модуляции ВОС(10,5);
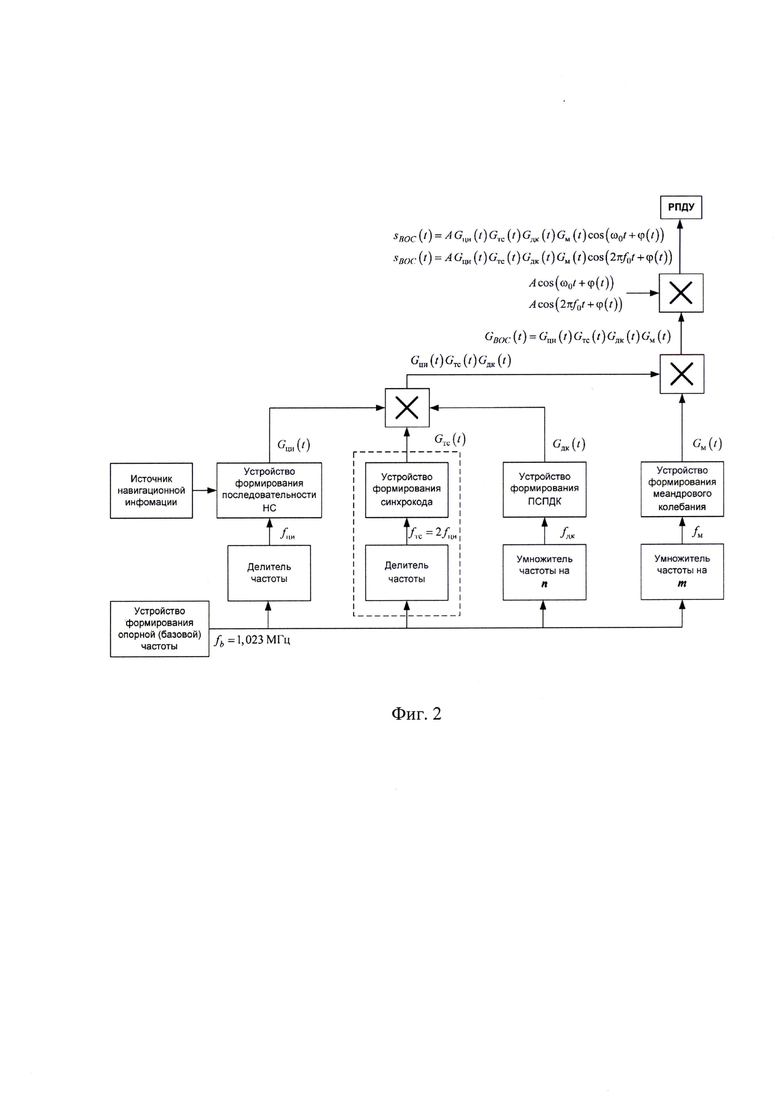
фиг. 2 - модулятор ВОС радионавигационных сигналов;
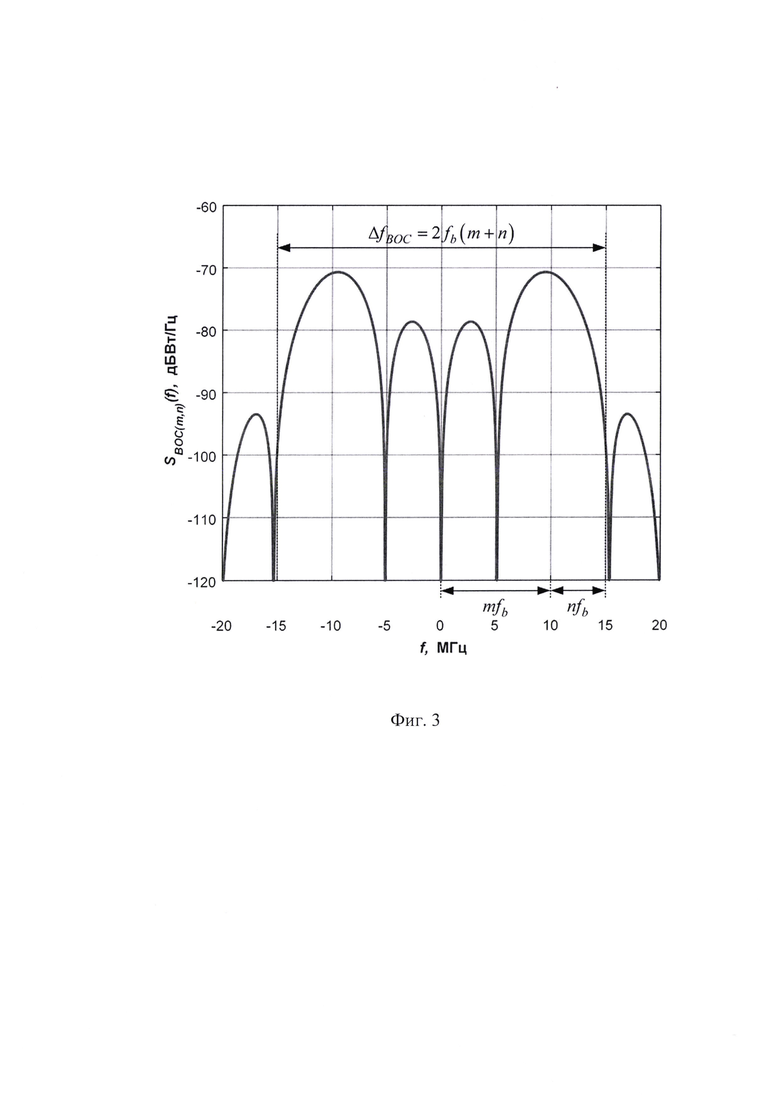
фиг. 3 - спектральная плотность мощности ВОС(10,5)
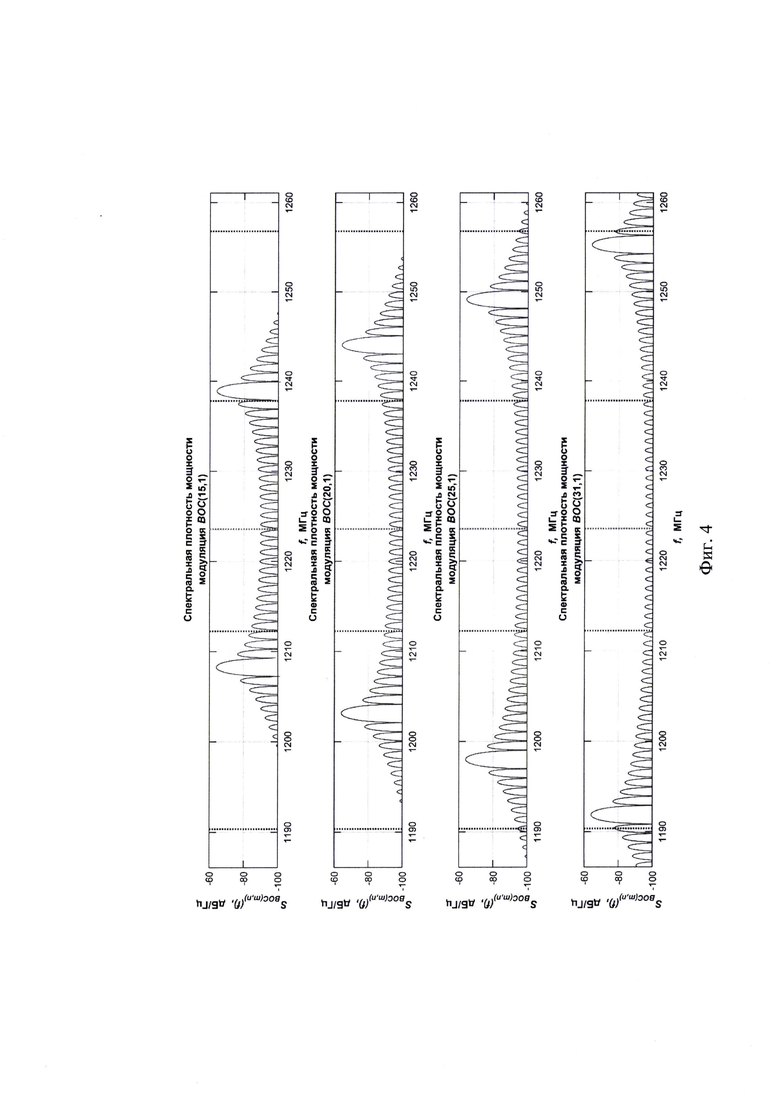
фиг. 4 - спектральная плотность мощности ВОС(15,1), ВОС(20,1), ВОС(25,1), BOC(31,1)при ƒ0 L3-L2=1223,575 МГц;
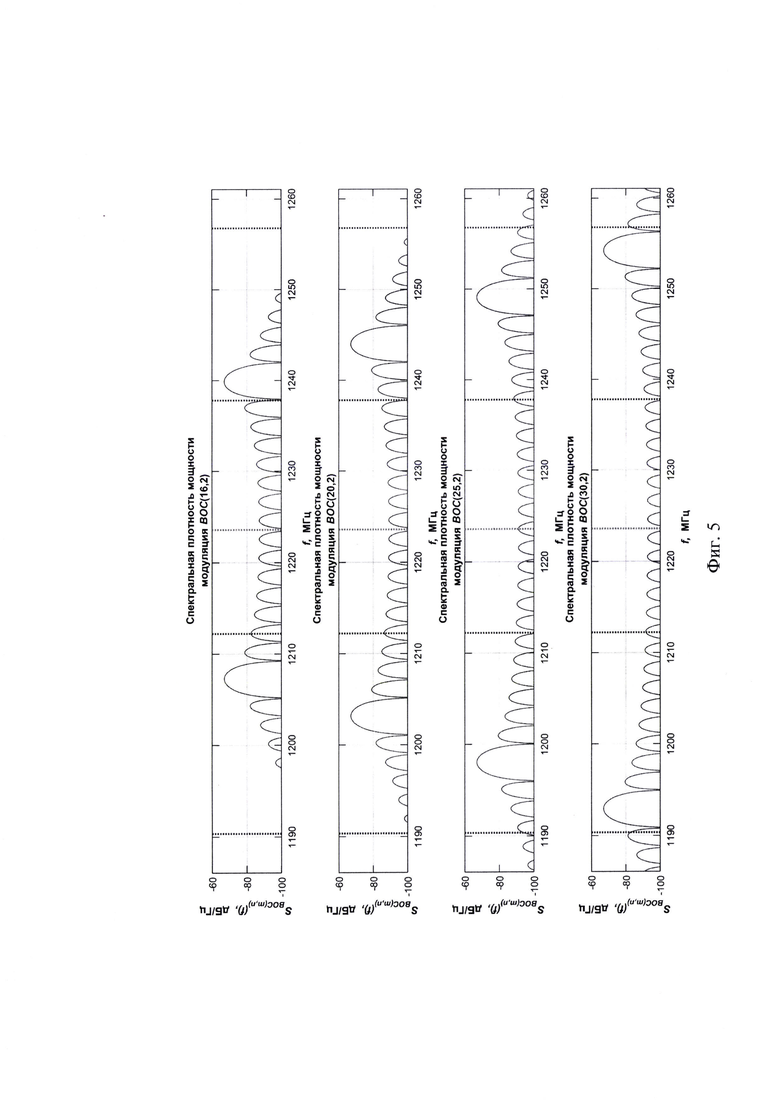
фиг. 5 - спектральная плотность мощности ВОС(16,2), ВОС(20,2), ВОС(25,2), ВОС(30,2) при ƒ0 L3-L2=1223,575 МГц;
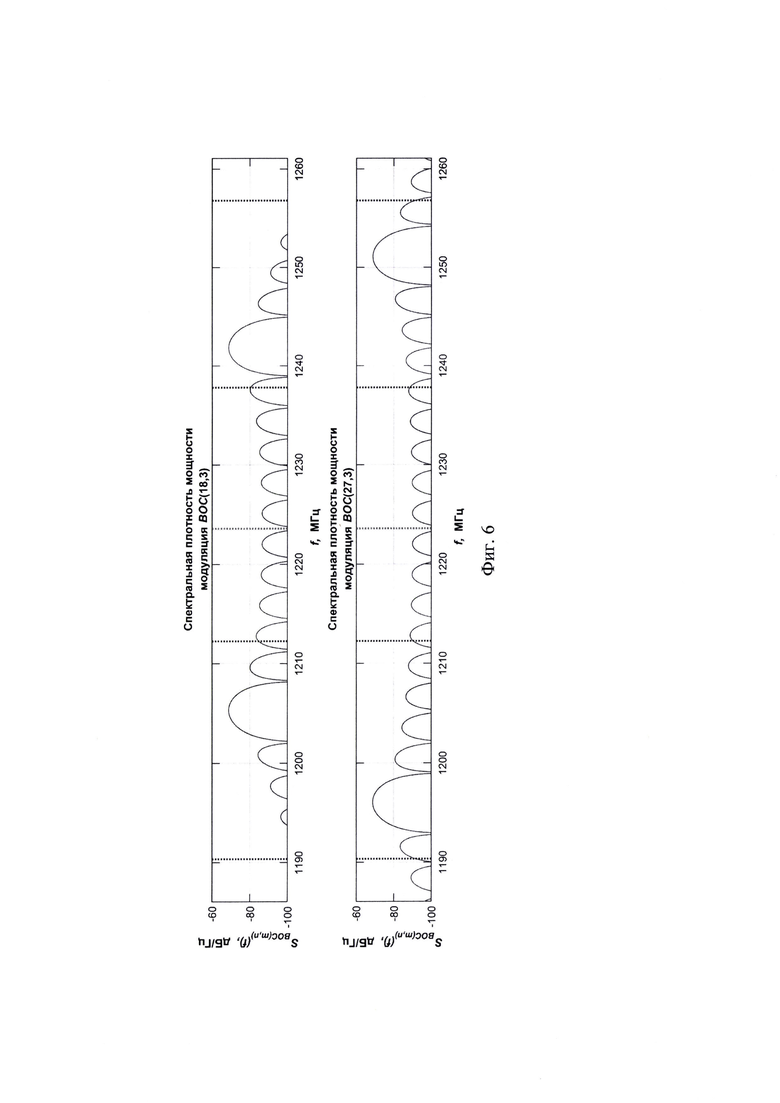
фиг. 6 - спектральная плотность мощности ВОС(18,3), ВОС(27,3) при ƒ0 L3-L2=1223,575 МГц;
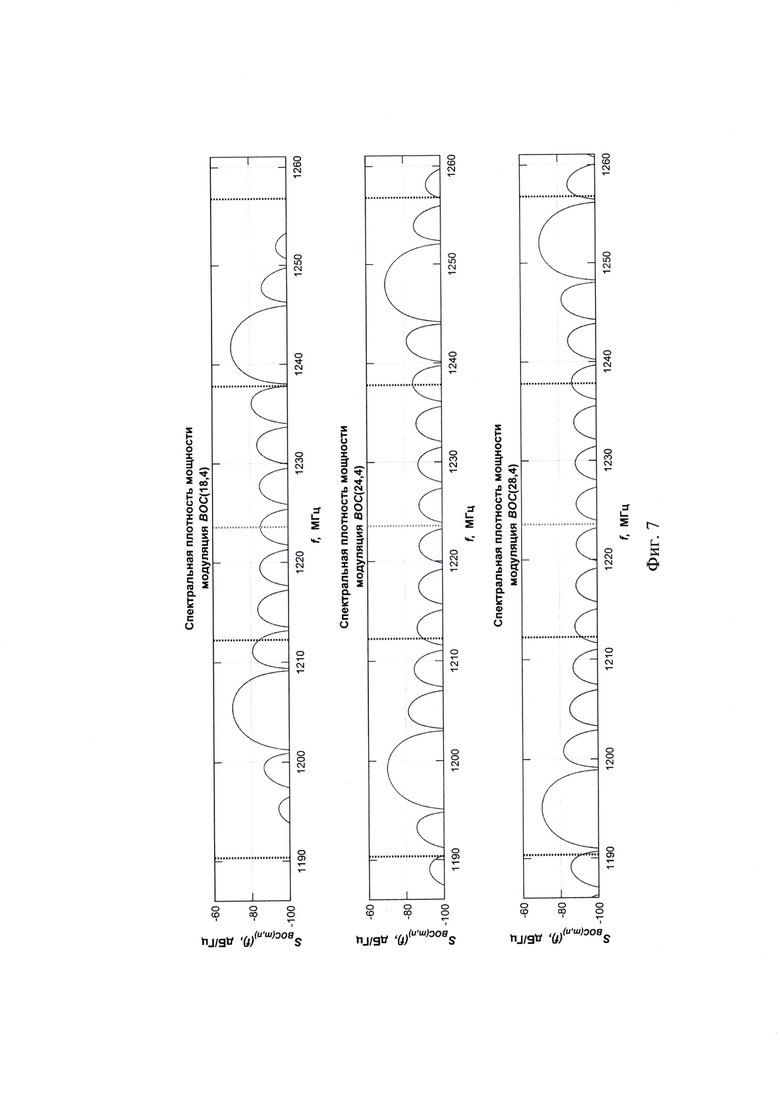
фиг. 7 - спектральная плотность мощности BOC(18,4), ВОС(24,4), BOC(28,4) при ƒ0 L3-L2=1223,575 МГц;
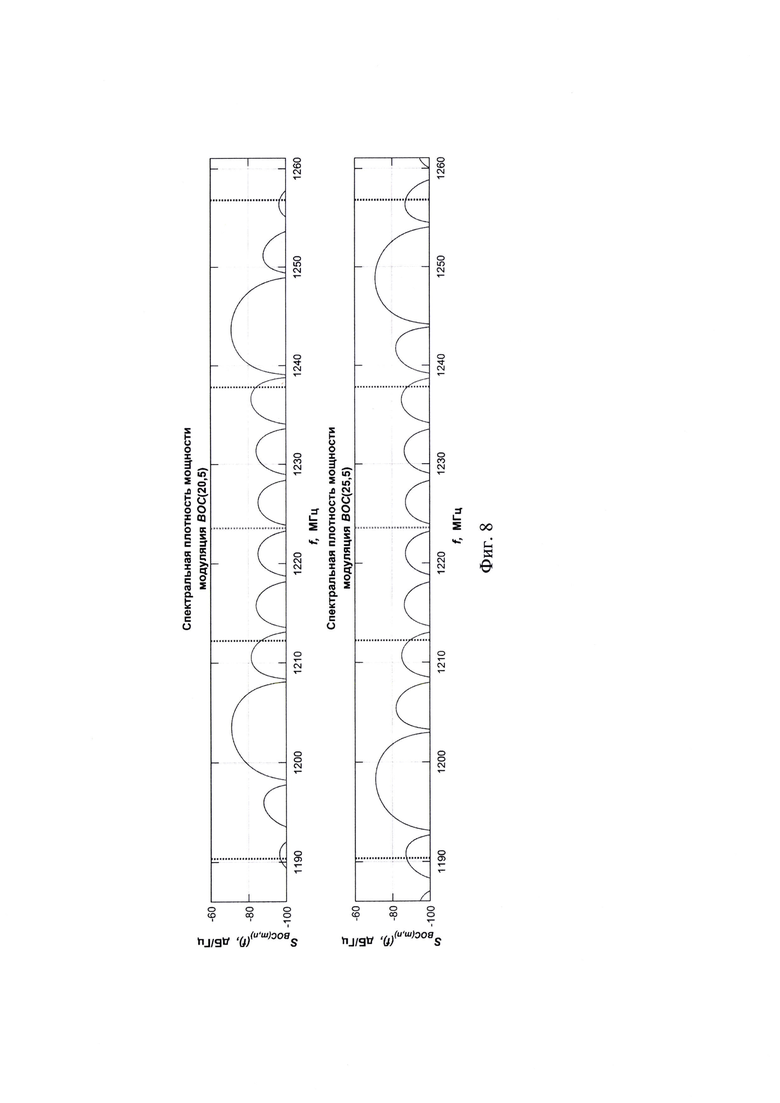
фиг. 8 - спектральная плотность мощности ВОС(20,5), ВОС(25,5) при ƒ0 L3-L2=1223,575 МГц;
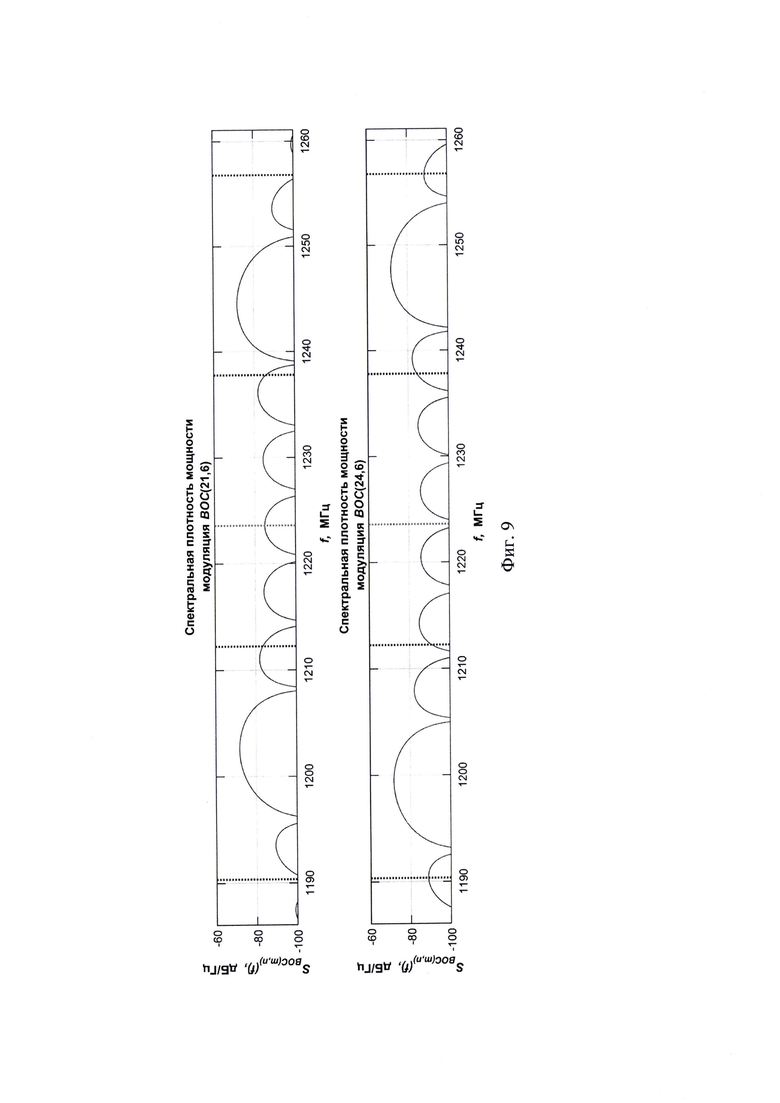
фиг. 9 - спектральная плотность мощности ВОС(21,6), ВОС(24,6) при ƒ0 L3-L2=1223,575 МГц;
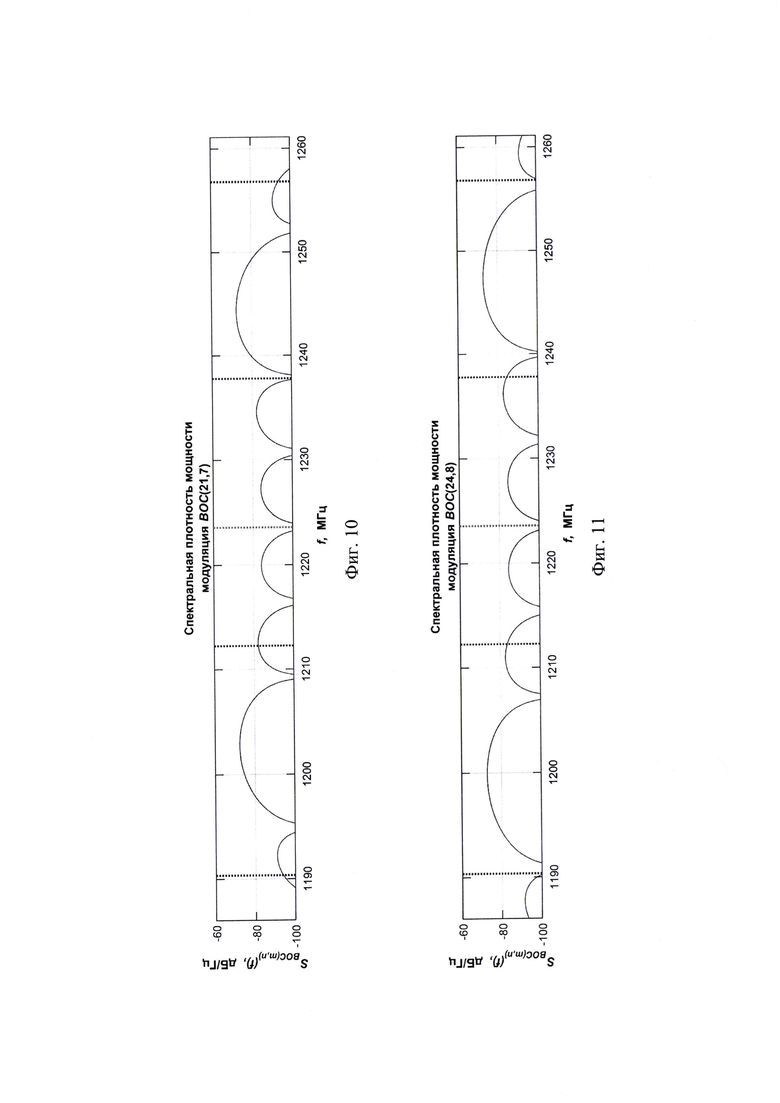
фиг. 10 - спектральная плотность мощности ВОС(21,1) при ƒ0 L3-L2=1223,575 МГц;
фиг. 11 - спектральная плотность мощности BOC(24,8) при ƒ0 L3-L2=1223,575 МГц;
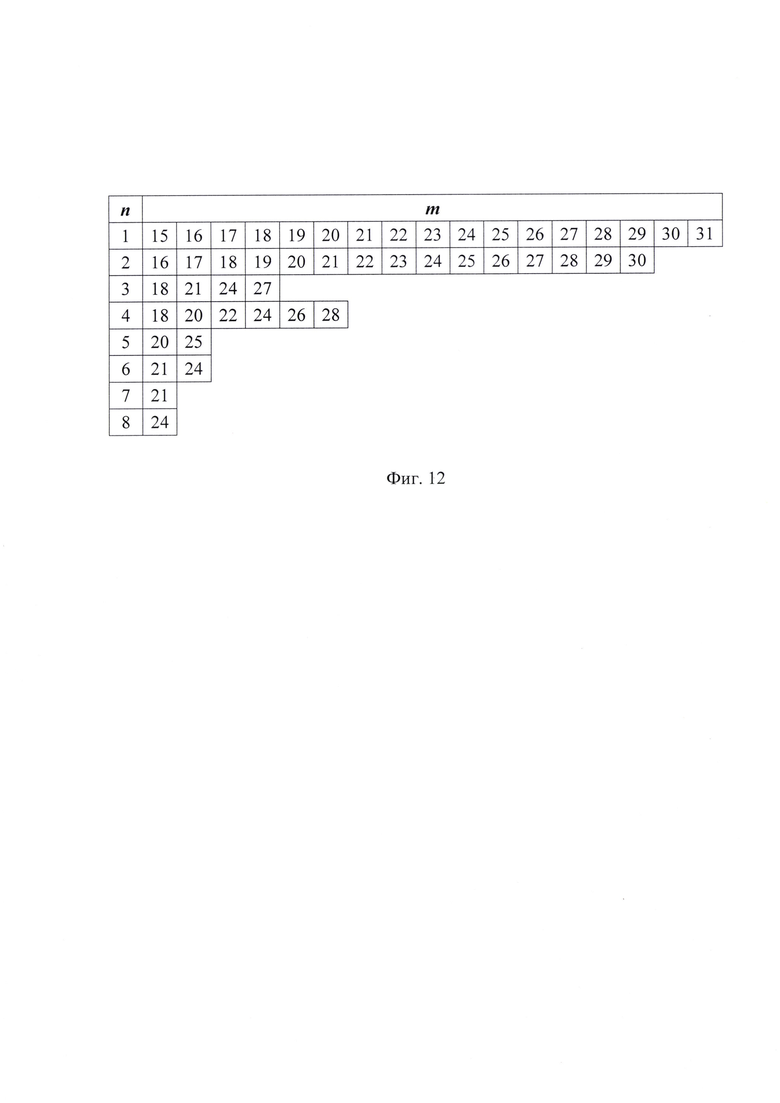
фиг. 12 - разрешенные значения m и n коэффициентов при ƒ0 L3-L2=1223,575 МГц;
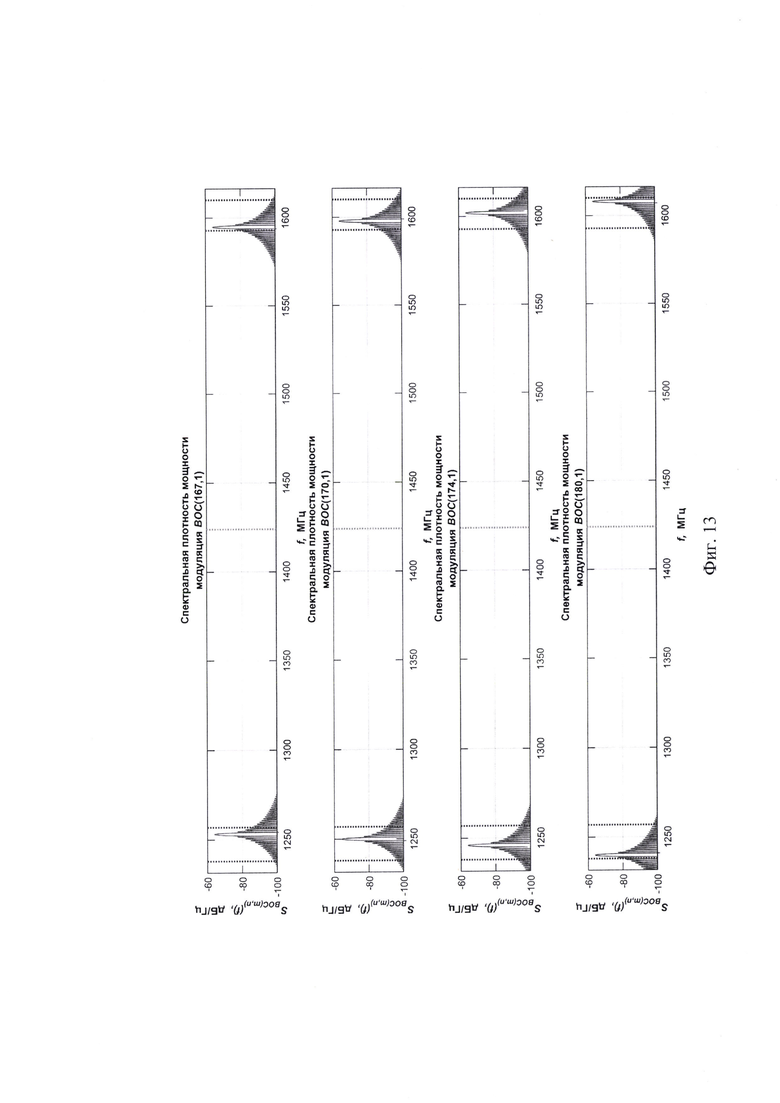
фиг. 13 - спектральная плотность мощности ВОС(167,1), ВОС(170,1), ВОС(174,1), ВОС(180,1) при ƒ0 L2-L1=1423,9 МГц;
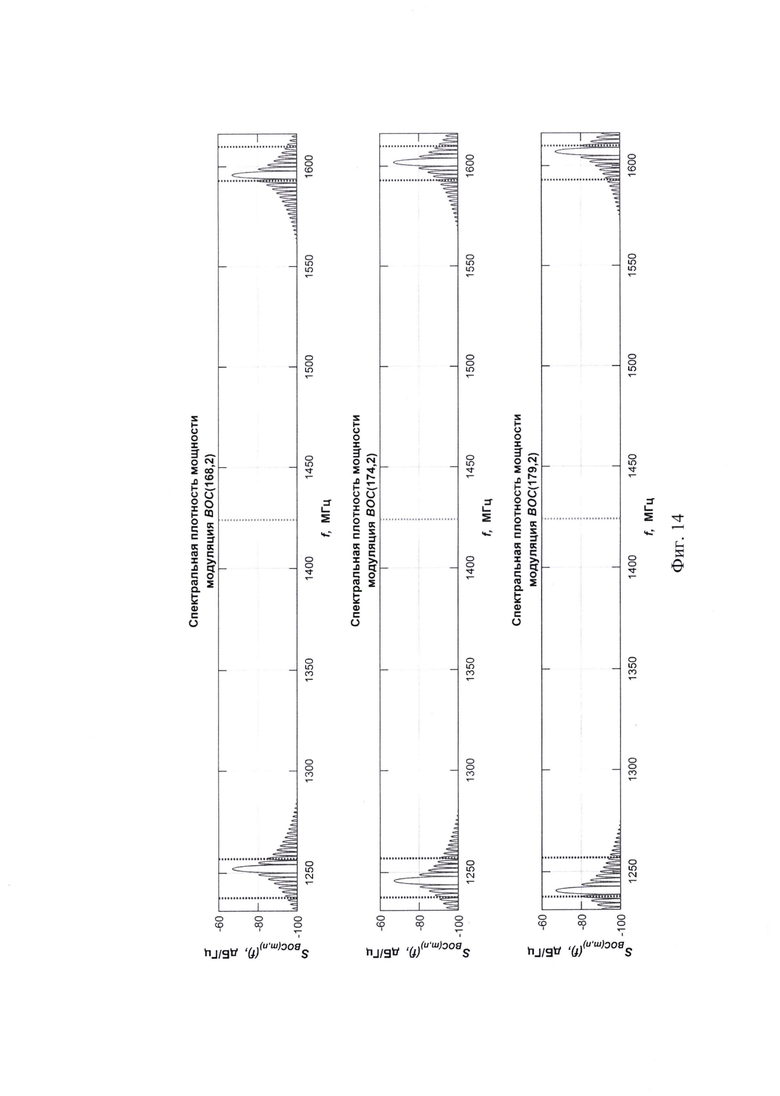
фиг. 14 - спектральная плотность мощности ВОС(168,2), ВОС(174,2), BOC(179,2) при ƒ0 L2-L1=1423,9 МГц;
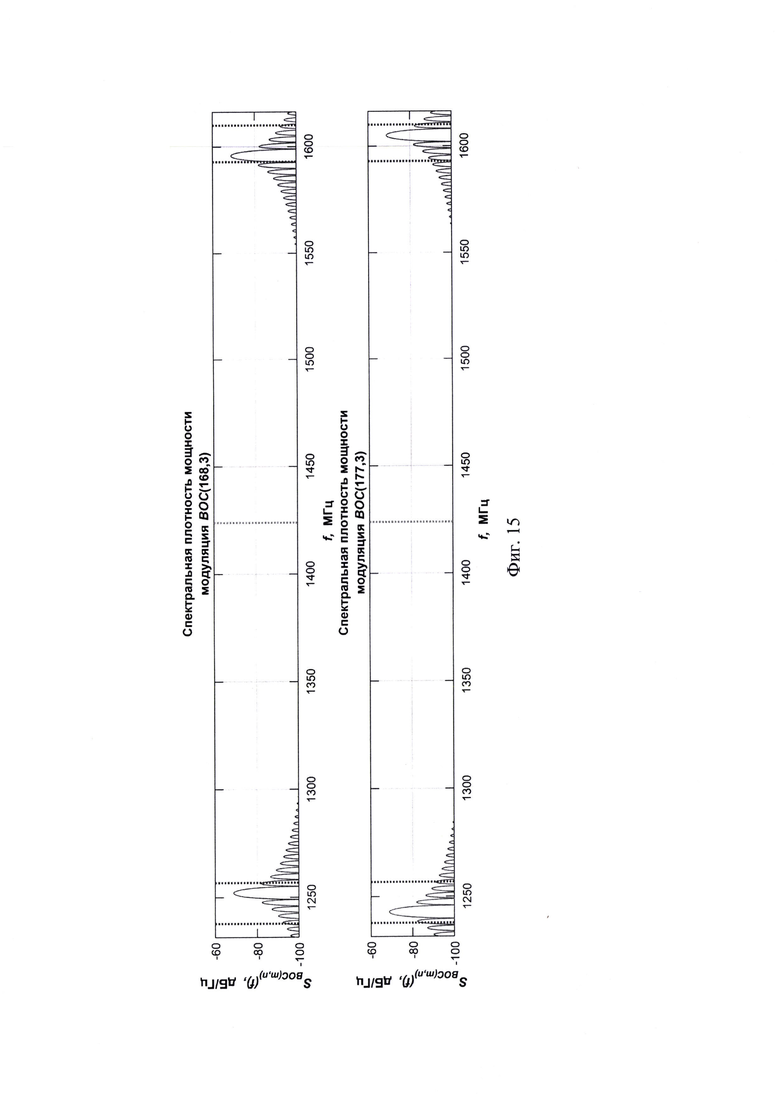
фиг. 15 - спектральная плотность мощности ВОС(168,3), ВОС(177,3) при ƒ0 L2-L1=1423,9 МГц;
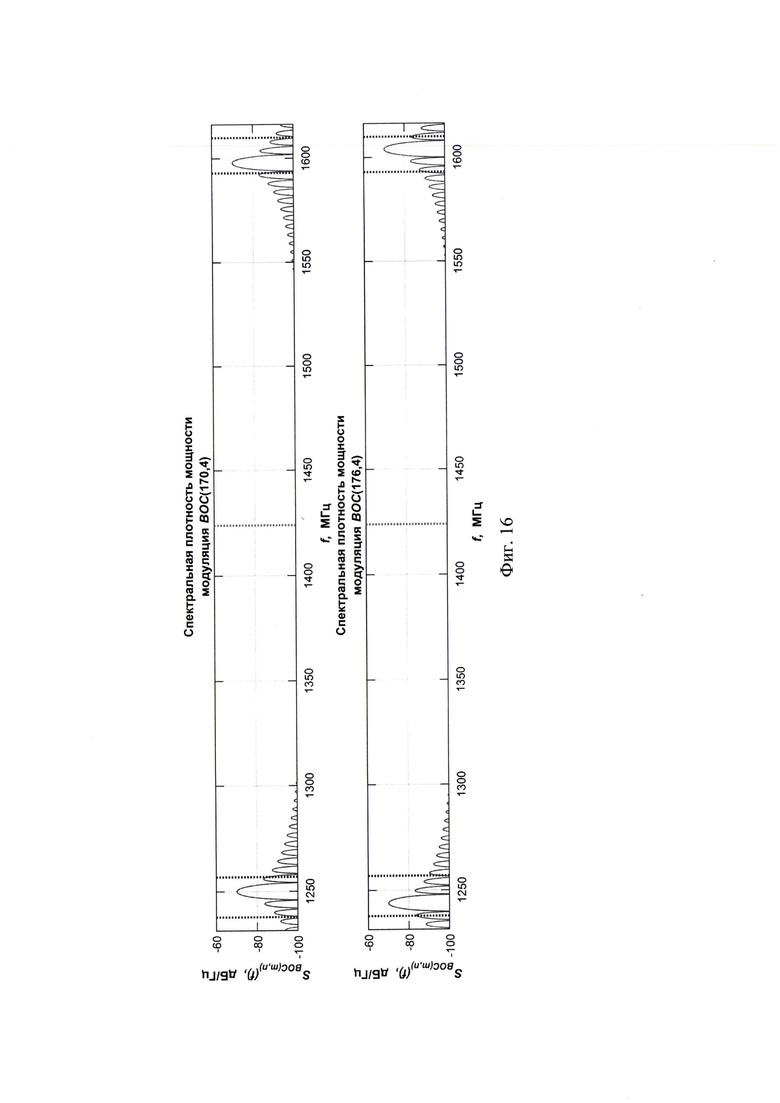
фиг. 16 - спектральная плотность мощности ВОС(170,4), ВОС(176,4) при ƒ0 L2-L1=1423,9 МГц;
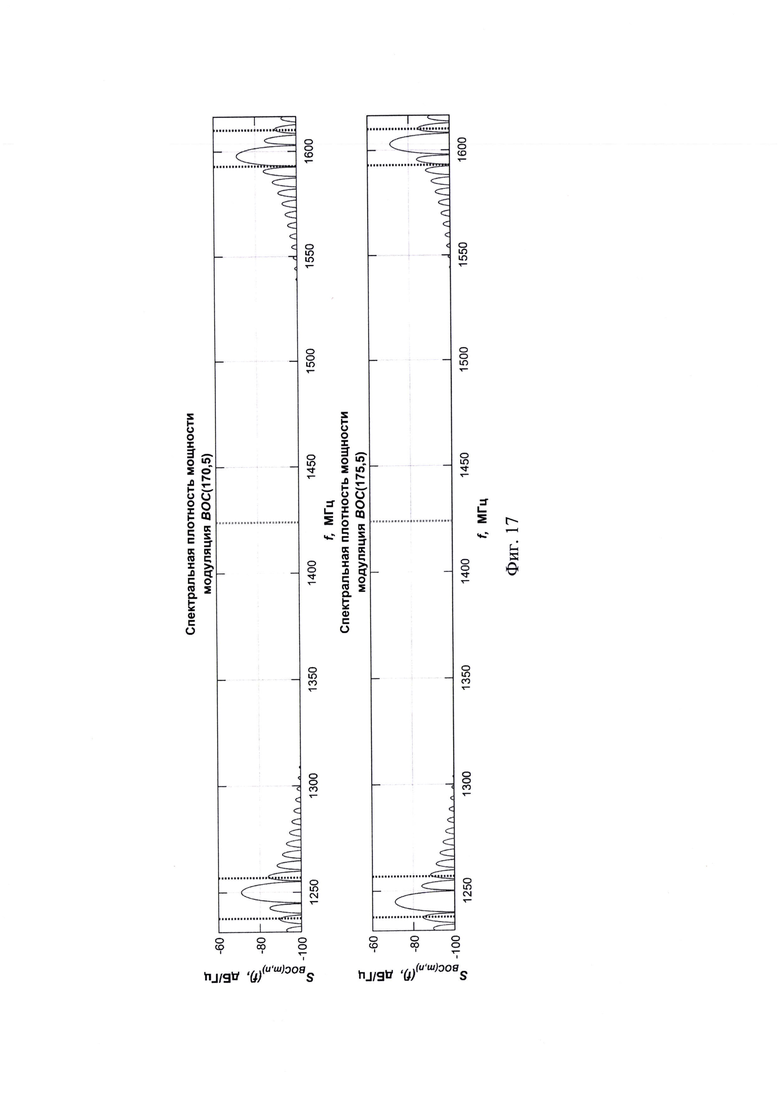
фиг. 17 - спектральная плотность мощности ВОС(170,5), ВОС(175,5) при ƒ0 L2-L1=1423,9 МГц;
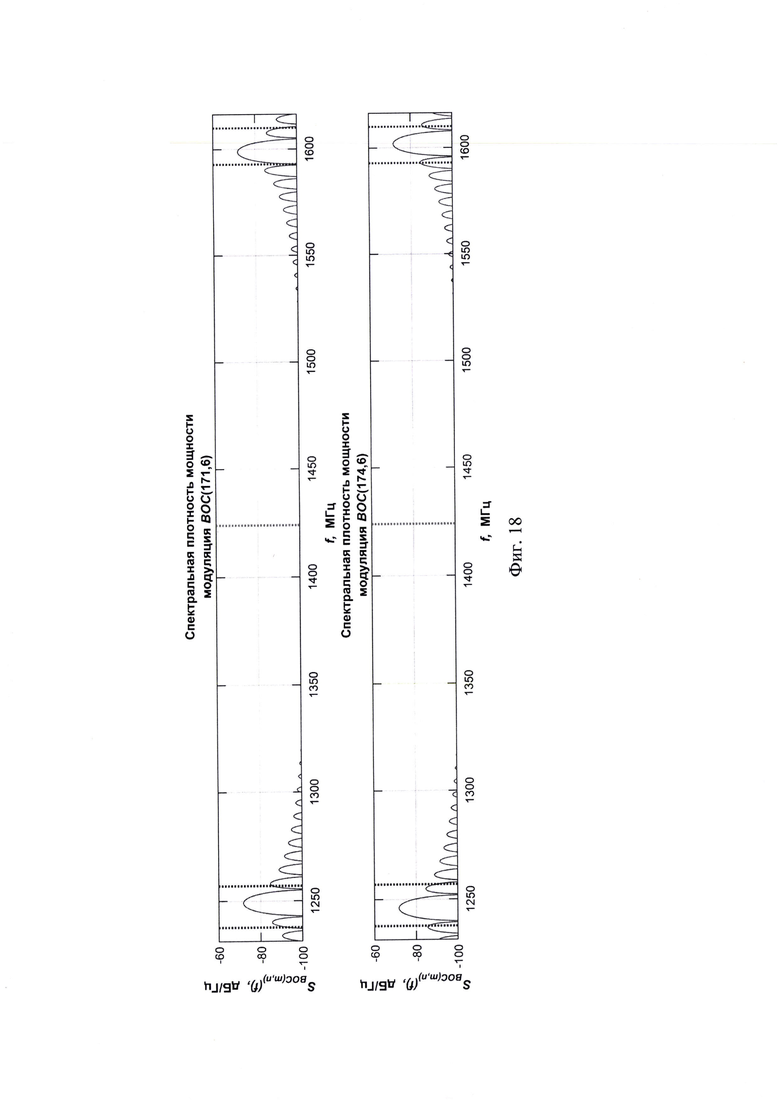
фиг. 18 - спектральная плотность мощности ВОС(171,6), ВОС(174,6) при ƒ0 L2-L1=1423,9 МГц;
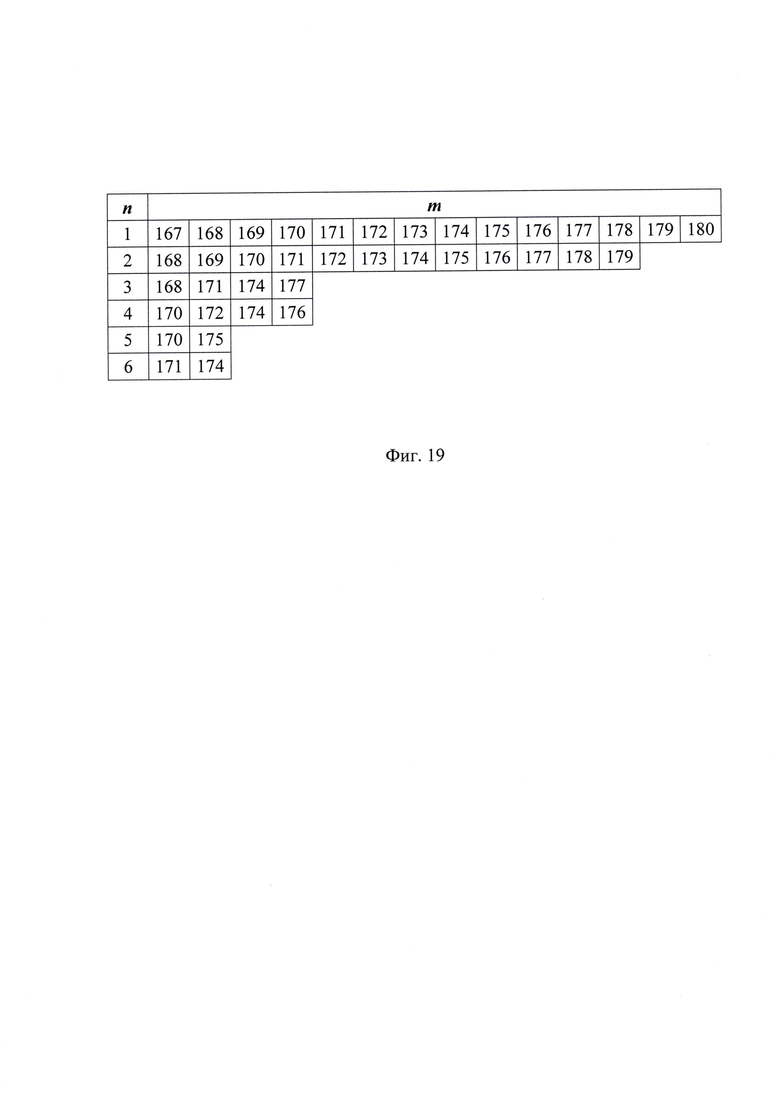
фиг. 19 - разрешенные значения m и n коэффициентов при ƒ0 L2-L1=1423,9 МГц;
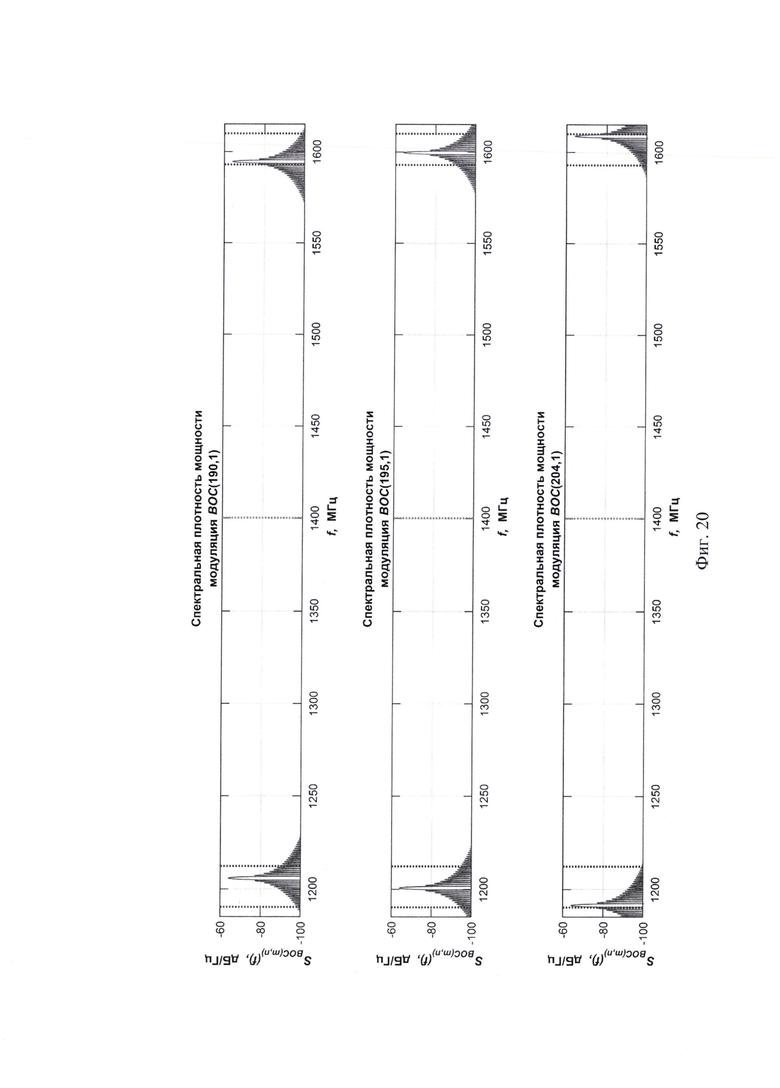
фиг. 20 - спектральная плотность мощности ВОС(190,1), ВОС(195,1), BOC(204,1) при ƒ0 L3-L1=1400,175 МГц;
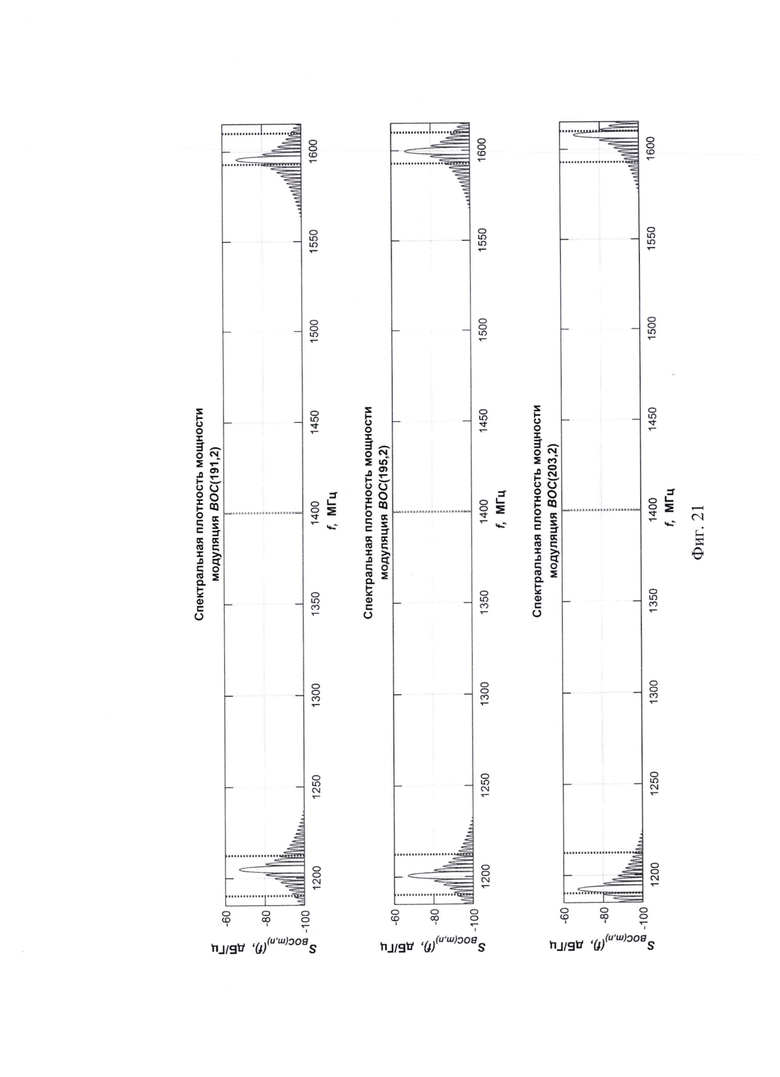
фиг. 21 - спектральная плотность мощности ВОС(191,2), ВОС(195,2), BOC(203,2) при ƒ0 L3-L1=1400,175 МГц;
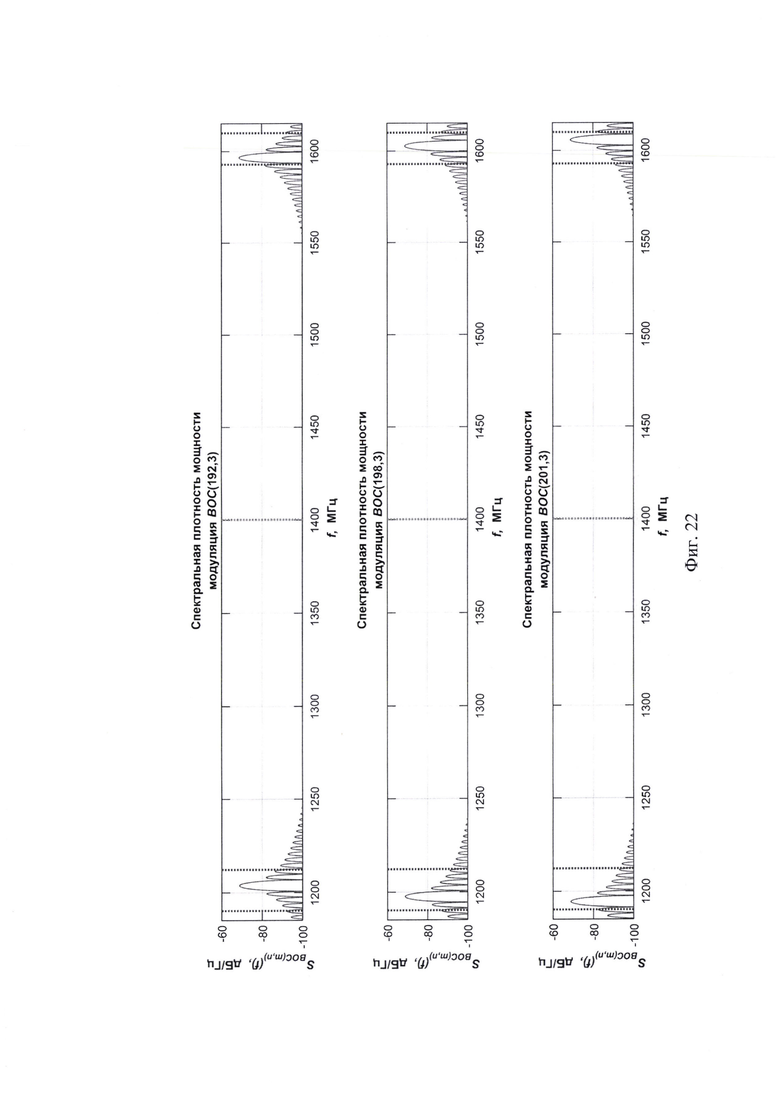
фиг. 22 - спектральная плотность мощности ВОС(192,3), ВОС(198,3), BOC(201,3) при ƒ0 L3-L1=1400,175 МГц;
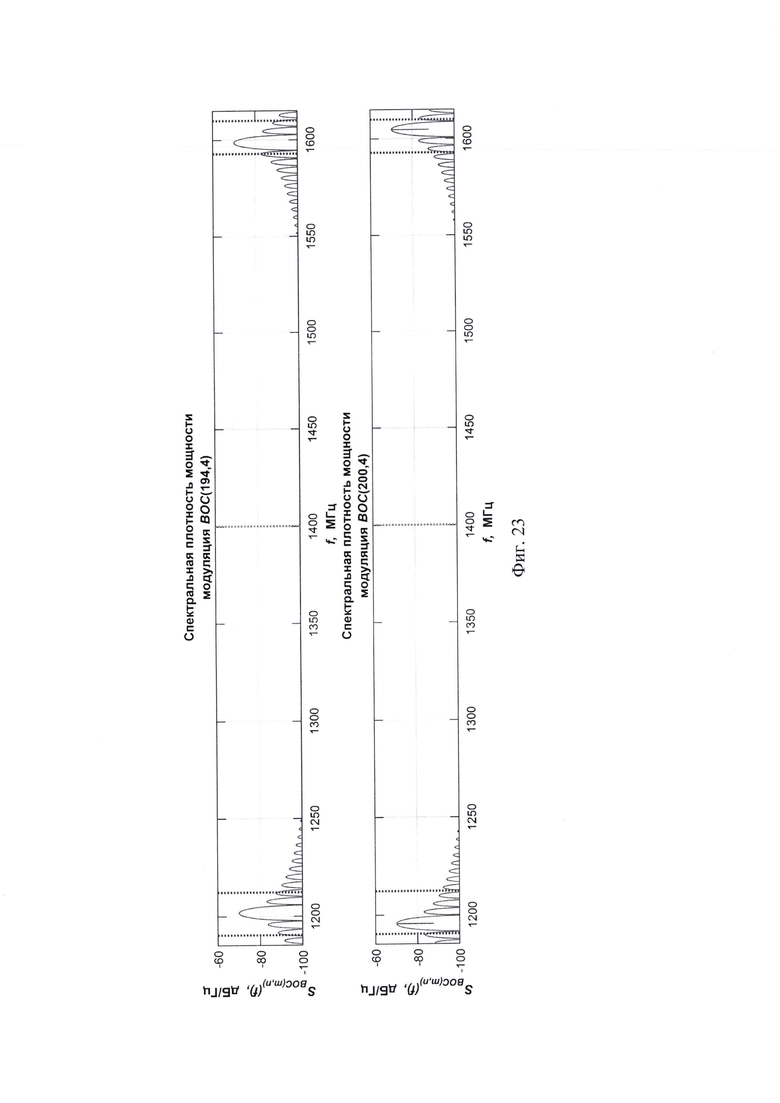
фиг. 23 - спектральная плотность мощности ВОС(194,4), BOC(200,4) при ƒ0 L3-L1=1400,175 МГц;
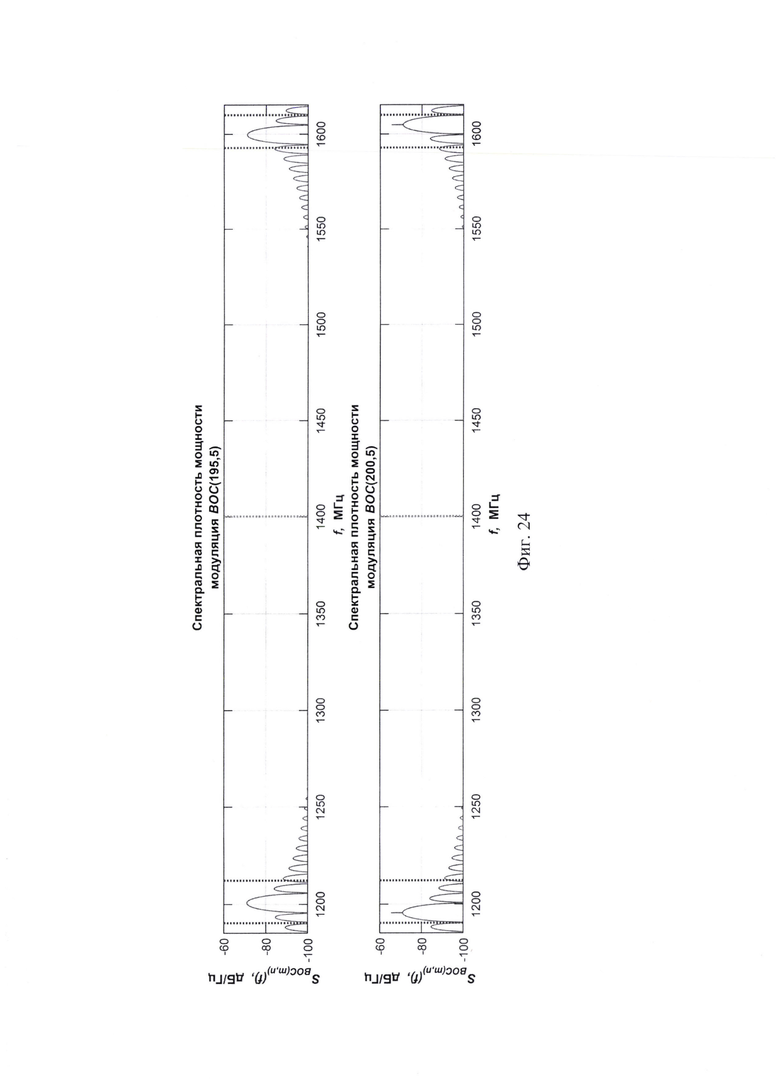
фиг. 24 - спектральная плотность мощности ВОС(195,5), BOC(200,5) при ƒ0 L3-L1=1400,175 МГц;
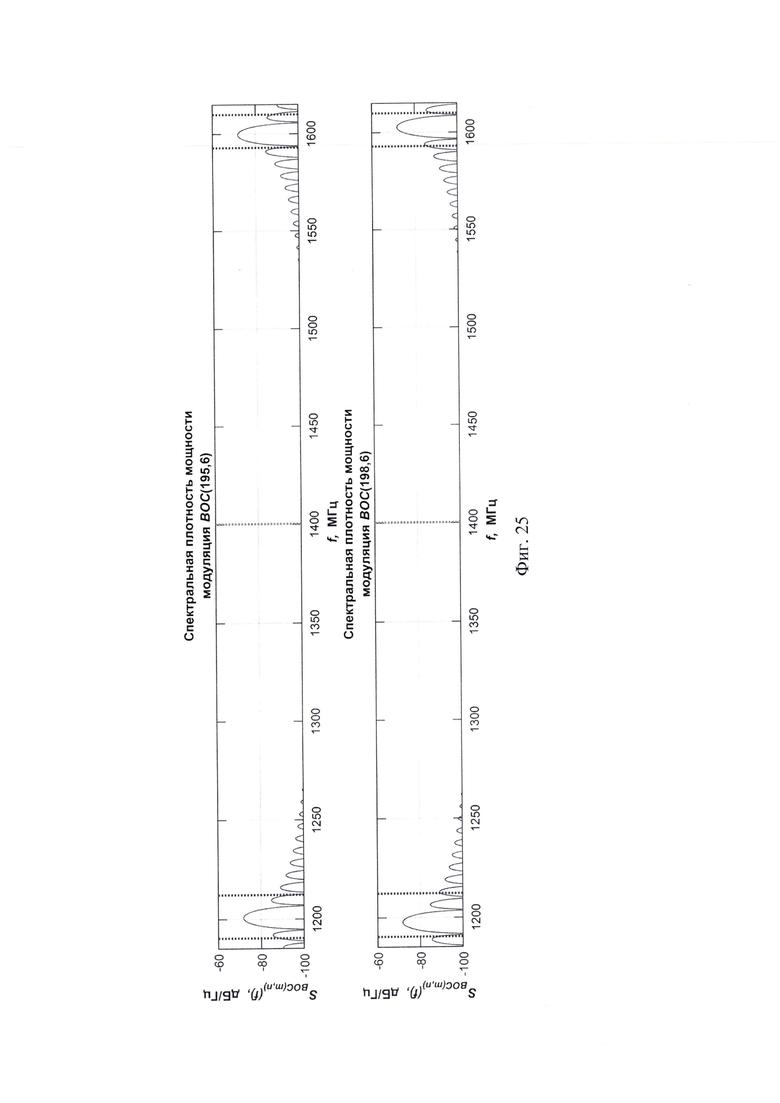
фиг. 25 - спектральная плотность мощности ВОС(195,6), ВОС(198,6) при ƒ0 L3-L1=1400,175 МГц;
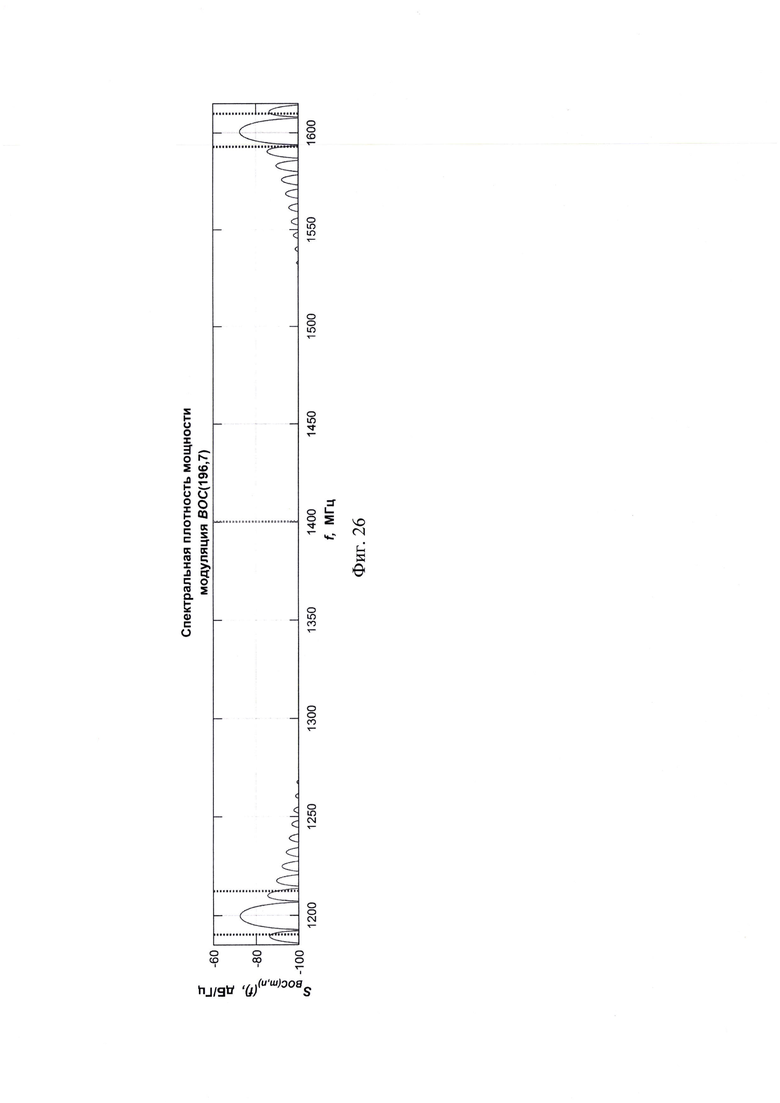
фиг. 26 - спектральная плотность мощности ВОС(196,7) при ƒ0 L3-L1=1400,75 МГц;
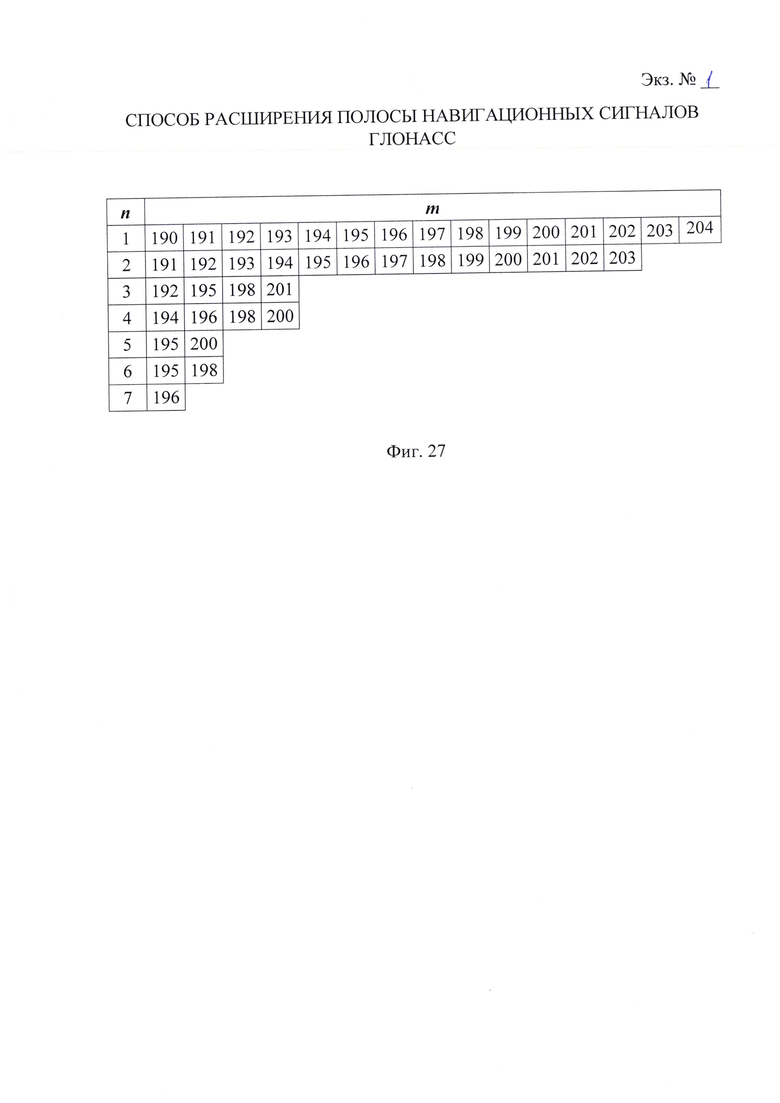
фиг. 27 - разрешенные значения m и n коэффициентов при ƒ0 L3-L1=1400,175 МГц.
Заявленный способ расширения полосы навигационных сигналов ГЛОНАСС основан на использовании особенностей меандровой поднесущей модуляции (binary offset carrier (ВОС)). Для сравнительной характеристики типов меандровой модуляции применяют обозначение BOC(ƒsub, ƒchip), при которой ƒsub - частота отстройки поднесущих, ƒchip - частота следования символов (чипов) кода модулирующей последовательности. На практике частоты ƒsub и ƒchip обычно кратны опорной (базовой) синхрочастоте ƒb (в частности, для систем GPS, Galileo и ГЛОНАСС [Интерфейсный контрольный документ. «Глобальная навигационная спутниковая система ГЛОНАСС. Навигационный радиосигнал открытого доступа с кодовым разделением в диапазоне L1». Редакция 1, 2013., Интерфейсный контрольный документ. «Глобальная навигационная спутниковая система ГЛОНАСС. Навигационный радиосигнал открытого доступа с кодовым разделением в диапазоне L2». Редакция 1, 2013., Интерфейсный контрольный документ. «Глобальная навигационная спутниковая система ГЛОНАСС. Навигационный радиосигнал открытого доступа с кодовым разделением в диапазоне L3». Редакция 1, 2013.] ƒb=1,023 МГц), поэтому используют форму записи для обозначения типа меандровой модуляции радиосигналов ВОС(m,n), где m, n - коэффициенты отношения поднесущей частоты ƒм и частоты следования символов (чипов) дальномерного кода ƒдк к опорной (базовой) синхрочастоте, определяющиеся выражениями при условии 
m=ƒм/ƒb, n=ƒдк/ƒb.
Отличие BOC-сигналов от традиционных шумоподобных сигналов заключается в использовании при формировании сигнала меандровой последовательности поднесущей частоты. Известно [Баскаков, С.И. Радиотехнические цепи и сигналы: учебник для вузов по спец. «Радиотехника». - 3-е изд., перераб. и доп. - М.: Высшая школа, 2000. - 462 с.], что если у радиосигнала на несущей частоте ƒ0 ввести дополнительную амплитудную модуляцию гармоническим колебанием с частотой ƒм, то получают радиосигнал с модуляцией на поднесущих частотах ƒ0+ƒм и ƒ0-ƒм.
Математически BOC-сигнал записывают как [ГЛОНАСС. Принципы построения и функционирования / Под ред. А.И. Перова, В.Н. Харисова. Изд. 4-е, перераб. и доп. - М: Радиотехника, 2010. 800 с, ил.]

где А - амплитуда радиосигнала;
ƒ0 - несущая частота радиосигнала;
ϕ0 - начальная фаза несущего колебания;
Gдк(t)=Gци(t)⋅Gтс(t)⋅Gпсп дк(t) - бинарная модулирующая последовательность, которая принимает значения ±1 и представляет собой результат перемножения (в достаточно общем случае) трех двоичных последовательностей: псевдослучайной последовательности дальномерного кода (ПСПДК) - Gпсп дк(t), посылок навигационного сообщения (НС) (в случае информационного сигнала) - Gци(t), посылок синхрокода для обеспечения тактовой синхронизации работы навигационного приемника - Gтс(t);
sign(sin(2πƒмt)) - дополнительная бинарная функция амплитудной модуляции на поднесущих частотах, принимающая значения ±1;
 - знаковая функция, принимающая значения ±1 в зависимости от знака аргумента;
- знаковая функция, принимающая значения ±1 в зависимости от знака аргумента;
ƒм - частота меандрового поднесущего колебания.
Из (1) следует, что при использовании такой модуляции на поднесущих частотах у радиосигнала с бинарной фазовой манипуляцией на π соответствующая функция амплитудной модуляции принимает вид

где Gм(t) - функция модуляции меандровой последовательностью (меандровое поднесущее колебание).
Коэффициент кратности меандровых импульсов Nм равен числу импульсов (положительных и отрицательных) меандрового колебания Gм(t), укладывающихся на длительности символа дальномерного кода Gдк(t) и определяется соотношением [Ярлыков М.С. Меандровые шумоподобные сигналы (BOC-сигналы) и их разновидности в спутниковых радионавигационных системах. Монография. - М.: Радиотехника, 2017. - 416 с.]

На фиг. 1 представлены графики меандрового поднесущего колебания Gм(t), ПСП дальномерного кода Gдк(t) и функция амплитудной модуляции GBOC(t) при коэффициенте кратности меандровых импульсов Nм=4, что соответствует, например, типу меандровой модуляции ВОС(10,5).
На фиг. 2 приведена обобщенная структурная схема модулятора ВОС-сигналов, где отражено, что функция амплитудной модуляции GBOC(t) обусловлена навигационной информацией, предназначенной для передачи навигационного сообщения Gци(t), ПСП дальномерного кода Gпсп дк(t) и импульсов меандрового поднесущего колебания Gм(t).
Анализ модулятора на фиг. 2 поясняет алгоритм формирования навигационных радиосигналов с меандровой модуляцией ВОС(m,n). Варьируя номиналами частот: ƒм=1/(2τм) - частота меандрового поднесущего колебания; ƒb - опорная (базовая) синхрочастота; ƒдк=1/τдк - частота следования элементов ПСП Gдк(t) формируют различные виды навигационных радиосигналов с меандровой модуляцией ВОС(m,n).
Энергетический спектр (спектральная плотность мощности) одиночного элемента модулирующей функции BOC-сигналов есть преобразование Фурье от соответствующей корреляционной функции. Учитывая, что ƒдк=1/τдк, ƒм=1/(2τм) формула для энергетического спектра одиночного элемента модулирующей функции BOC-сигналов при различных значениях коэффициента кратности Nм представляет собой выражение [Ярлыков М.С. Меандровые шумоподобные сигналы (ВОС-сигналы) и их разновидности в спутниковых радионавигационных системах. Монография. - М.: Радиотехника, 2017. - 416 с.]
Важной особенностью радиосигналов с BOC-модуляцией является то, что более мощные спектральные составляющие сосредоточены на краях занимаемого частотного диапазона в двух группах главных лепестков спектра (более 90% мощности), меду которыми находится глубокий провал. Ширину спектра такого радиосигнала определяют по крайним границам главных лепестков как ΔƒBOC=2ƒb(m+n) [Харисов В.Н., Оганесян А.А. Потенциальные характеристики помехоустойчивости перспективных сигналов ГНСС // Радиотехника. 2010. №7. С. 121.]. Это позволяет разместить сигнал меандровой поднесущей модуляцией так, чтобы группы главных лепестков спектра были расположены в выделенных для ГЛОНАСС частотных диапазонах, а провал в середине спектра не нарушал совместимости с другими сигналами, расположенными между диапазонами. На фиг. 3 представлен график спектральной плотности мощности радиосигнала с меандровой модуляцией ВОС(10,5) не содержащего несущего колебания.
Другой важной особенностью таких сигналов является возможность приема главных лепестков спектра по отдельности. Благодаря этому данные сигналы можно принимать как сложными специализированными приемниками в широкой полосе частот, так и простыми бытовыми приемниками в узкой полосе одного из главных лепестков.
Регламентом радиосвязи Международного союза электросвязи [Регламент радиосвязи Международного союза электросвязи. ITU. 2012.] спутниковой радионавигации отведены следующие частотные поддиапазоны:
L1 - полоса частот 1559…1610 МГц (на первичной основе);
L2 - полоса частот 1215…1300 МГц (на первичной основе);
L3 - полоса частот 1164…1215 МГц (на первичной основе);
С - полоса частот 5010…5030 МГц (на первичной основе);
Ku - полоса частот 14300…14400 МГц (на вторичной основе).
Наиболее активно международным сообществом используют частотные поддиапазоны L1, L2, L3. В рамках, указанных выше частотных поддиапазонов L1, L2, L3 ГНСС ГЛОНАСС соответствующими документами Международного союза электросвязи отведены следующие частотные поддиапазоны (на первичной основе):
L1 - полоса частот 1592,9…1610 МГц (ΔƒL1=17,1 МГц);
L2 -полоса частот 1237,8…1256,8 МГц (ΔƒL2=19 МГц);
L3 - полоса частот 1190,35…1212,23 МГц (ΔƒL3=21,88 МГц).
Заявленный способ может быть осуществлен посредством различных вариантов размещения радионавигационных BOC-сигналов в указанных диапазонах.
При размещении BOC-сигналов в диапазонах L3 и L2. Расстояние между внешними и внутренними границами этих диапазонов соответственно составляет 66,45 МГц и 25,57 МГц. Можно создать 48 радионавигационных сигналов с меандровой модуляцией ВОС(m,n) на несущей частоте ƒ0 L3-L2=1223,575 МГц (фиг. 4…фиг. 11), для которых значения m, n коэффициентов приведены фиг. 12.
При размещении BOC-сигналов в диапазонах L2 и L1. Расстояние между внешними и внутренними границами этих диапазонов соответственно составляет 372,2 МГц и 336,1 МГц. Можно создать 38 радионавигационных сигналов с меандровой модуляцией ВОС(m,n) на несущей частоте ƒ0 L2-L1=1423,9 МГц (фиг. 13…фиг. 18), для которых значения m, n коэффициентов приведены фиг. 19.
При размещении BOC-сигналов в диапазонах L3 и L1. Расстояние между внешними и внутренними границами этих диапазонов соответственно составляет 419,65 МГц и 380,67 МГц. Можно создать 41 радионавигационный сигнал с меандровой модуляцией ВОС(m,n) на несущей частоте ƒ0 L3-L1=1400,175 МГц (фиг. 20…фиг. 26), для которых значения m, n коэффициентов приведены фиг. 27.
На основе выше изложенного представляется возможным сформировать программу псевдослучайного формирования радионавигационных BOC-сигналов.
Задают время работы на одной частоте Tƒ из перечня разрешенных.
Задают время работы модулятора BOC-сигналов Tn с одним номиналом значения коэффициента отношения частоты следования символов (чипов) дальномерного кода ƒдк к опорной (базовой) синхрочастоте - n из перечня разрешенных, соответствующих выбранной несущей частоте.
Задают время работы модулятора BOC-сигналов Tm с одним номиналом значения коэффициента отношения поднесущей частоты ƒм к опорной (базовой) синхрочастоте - m из перечня разрешенных, соответствующих выбранной несущей частоте.
Формируют программу псевдослучайной перестройки несущей частоты из перечня разрешенных частот, являющимися центральными частотами поддиапазонов L1, L2, L3 ГЛОНАСС: ƒ0 L3-L2=1223,575 МГц; ƒ0 L2-L1=1423,9МГц; ƒ0 L3-L1=1400,175 МГц.
Формируют программу псевдослучайного изменения номинала коэффициента п из перечня разрешенных, соответствующих выбранной несущей частоте (фиг. 12, фиг. 19, фиг. 27).
Формируют программу псевдослучайного изменения номинала коэффициента т из перечня разрешенных, соответствующих выбранной несущей частоте (фиг. 12, фиг. 19, фиг. 27).
Применение заявленного способа формирования сигналов с меандровой поднесущей модуляцией на псевдослучайных рабочих частотах и псевдослучайным законом назначения номиналов значений коэффициентов m, n позволит повысить качество приема таких навигационных сигналов на фоне помех естественного и искусственного происхождения.
Настоящее решение технически реализуемо, поскольку базируется на известных и отработанных устройствах, и предлагается к использованию в спутниковых навигационных системах.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ расширения полосы навигационных сигналов ГЛОНАСС с помощью меандровой поднесущей модуляции | 2017 |
|
RU2663807C1 |
| Способ и устройство для нелинейного уплотнения навигационного сигнала ГЛОНАСС | 2018 |
|
RU2686660C1 |
| СИГНАЛЫ, СИСТЕМА, СПОСОБ И УСТРОЙСТВО | 2007 |
|
RU2432674C2 |
| СИГНАЛЫ, СИСТЕМА И СПОСОБ МОДУЛЯЦИИ | 2007 |
|
RU2441255C2 |
| СИГНАЛЫ, СИСТЕМА И СПОСОБ МОДУЛЯЦИИ | 2004 |
|
RU2385466C2 |
| Способ измерения мощности навигационных сигналов с частотным и кодовым разделением | 2022 |
|
RU2790658C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ПРИЕМА РАДИОНАВИГАЦИОННОГО СИГНАЛА С МОДУЛЯЦИЕЙ С БИНАРНОЙ СМЕЩЕННОЙ НЕСУЩЕЙ | 2007 |
|
RU2446412C2 |
| СПОСОБ ПРИЕМА И ПРИЕМНИК ДЛЯ РАДИОНАВИГАЦИОННОГО СИГНАЛА, МОДУЛИРОВАННОГО СВОС ИЛИ ТМВОС РАСПРОСТРАНЯЮЩИМСЯ СИГНАЛОМ | 2007 |
|
RU2405173C1 |
| СПОСОБ ПОЛУЧЕНИЯ И РЕСИВЕР ДЛЯ РАДИОНАВИГАЦИОННОГО СИГНАЛА, МОДУЛИРОВАННОГО СВОС РАСПРОСТРАНЯЮЩИМСЯ КОЛЕБАТЕЛЬНЫМ СИГНАЛОМ | 2007 |
|
RU2421750C2 |
| СПОСОБ И СИСТЕМА ПОЗИЦИОНИРОВАНИЯ МОБИЛЬНОГО ТЕРМИНАЛА ВНУТРИ ЗДАНИЙ НА ОСНОВЕ ГЛОНАСС-ПОДОБНОГО СИГНАЛА | 2012 |
|
RU2533202C2 |
Изобретение относится к области радионавигации, а именно к способам расширения спектра навигационных радиосигналов спутниковых навигационных систем, и может быть использовано при создании и совершенствовании навигационной аппаратуры системы ГЛОНАСС. Техническим результатом является повышение качества приема навигационного сигнала на фоне помех естественного и искусственного происхождения путем формирования сигналов в широкой полосе и рациональным размещением главных максимумов спектров широкополосных сигналов в выделяемых для основных сигналов системы ГЛОНАСС частотных диапазонах. Он достигается тем, что в способе реализована возможность формирования сигналов с меандровой поднесущей модуляцией на псевдослучайных рабочих частотах и псевдослучайным законом назначения номиналов значений коэффициентов m, n, чем и достигается повышение качества приема навигационного сигнала на фоне помех естественного и искусственного происхождения за счет формирования сигналов в широкой полосе и рациональным размещением их главных максимумов спектров широкополосных сигналов в выделяемых для основных сигналов системы ГЛОНАСС частотных диапазонах. 27 ил.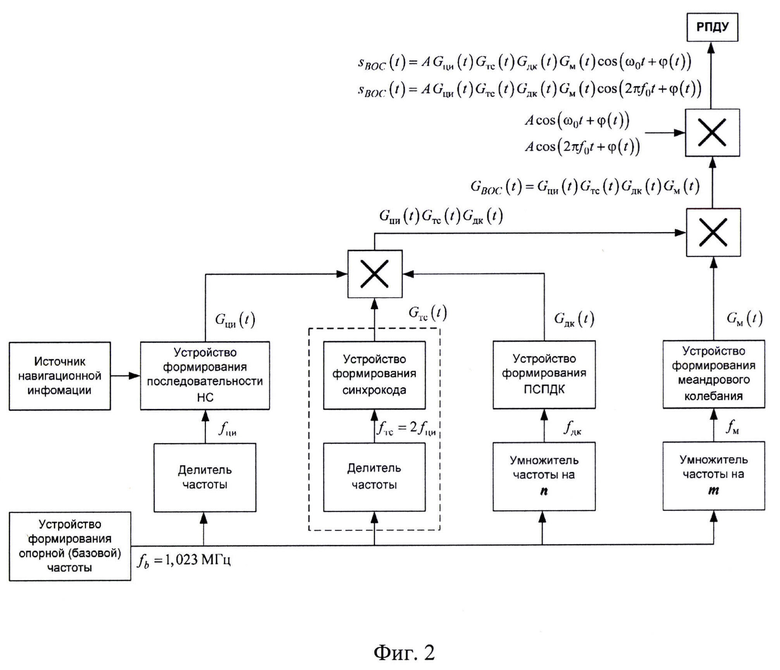
Способ расширения полосы навигационных сигналов ГЛОНАСС, заключающийся в том, что формируют сигнал меандровой последовательности поднесущей частоты путем модуляции на несущей частоте с использованием ВОС-сигнала, позволяющей в результате такой модуляции разместить группы главных лепестков спектра в выделенных для сигналов системы ГЛОНАСС частотных диапазонах, обеспечивают прием основных навигационных сигналов системы ГЛОНАСС одновременно в двух частотных диапазонах в любом сочетании из диапазонов L1, L2, L3, отличающийся тем, что назначают номиналы несущих частот ƒ0 L2-L1, ƒ0 L3-L2, ƒ0 L3-L1 и диапазон изменения числовых значений для коэффициентов меандровой модуляции радиосигналов m, n для каждой из несущих частот ƒ0 L2-L1, ƒ0 L3-L2, ƒ0 L3-L1 таким образом, чтобы главные лепестки спектра ВОС-сигнала на несущих частотах были расположены в частотных диапазонах L2-L1, L3-L2 и L3-L1 системы ГЛОНАСС, устанавливают время работы на одной частоте Tƒ из перечня разрешенных ƒ0 L2-L1, ƒ0 L3-L2, ƒ0 L3-L1 задают время работы модулятора BOC-сигналов Tn с одним номиналом значения коэффициента отношения частоты следования символов дальномерного кода ƒдк к опорной синхрочастоте - n из перечня разрешенных, соответствующих выбранной несущей частоте, задают время работы модулятора ВОС-сигналов Tm с одним номиналом значения коэффициента отношения поднесущей частоты ƒм к опорной синхрочастоте - m из перечня разрешенных, соответствующих выбранной несущей частоте, формируют программу псевдослучайного изменения номинала несущей частоты из назначенных ƒ0 L2-L1, ƒ0 L3-L2, ƒ0 L3-L1 формируют программу псевдослучайного изменения значений коэффициентов меандровой модуляции радиосигналов m, n из числового диапазона соответствующего назначенной несущей частоте ƒ0 L2-L1, ƒ0 L3-L2, ƒ0 L3-L1.
| Способ расширения полосы навигационных сигналов ГЛОНАСС с помощью меандровой поднесущей модуляции | 2017 |
|
RU2663807C1 |
| УСТРОЙСТВО ДЛЯ ОДНОВРЕМЕННОГО ПРИЕМА СИГНАЛОВ РАЗЛИЧНЫХ СИСТЕМ СПУТНИКОВОЙ НАВИГАЦИИ | 2015 |
|
RU2611069C1 |
| ПРИЕМНИК СПУТНИКОВОЙ НАВИГАЦИИ | 1992 |
|
RU2012897C1 |
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |

