Изобретение относится к области радионавигации, а именно к способам расширения спектра навигационных радиосигналов спутниковых навигационных систем, и может быть использовано при создании навигационной аппаратуры системы ГЛОНАСС, предназначенной для передачи навигационных сигналов с частотным и кодовым разделением.
Из уровня техники, в частности из описания устройства для обработки навигационных сигналов ГЛОНАСС, GPS и ГАЛИЛЕО (см. RU 2435307 C1, 27.11.2011) (1), известен способ использования меандровой поднесущей модуляции. Однако способ (1) обеспечивает прием сигнала, а не его передачу, как в заявляемом способе.
Из уровня техники известны способы расширения полосы, в которых применяется модуляция меандровой поднесущей частоты, например способ формирования сигналов навигационной спутниковой системы (см. RU 2432674 C2, 27.10.2011) (2), который обеспечивает общую спектральную плотность мощности PSD для сигналов каждой спутниковой навигационной системы в диапазоне LI RNSS (радионавигационная спутниковая служба). Для этого генерируют сигнал модуляции, содержащий объединение, по меньшей мере, двух сигналов модуляции, например сигналов ВОС или их производных, имеющих части (элемент сигнала или несколько элементов сигнала) с соответствующими относительными фазами или состояниями ({++, --} и {+-, -+}, выбранными так, чтобы среднее значение множества упомянутых частей, по меньшей мере, уменьшало кросс-спектральные составляющие сложного спектра.
Недостатком указанного способа (2) является то, что он обеспечивает передачу сигнала только в одном из диапазонов, а именно диапазоне L1.
Техническим результатом заявленного изобретения является повышение качества приема навигационного сигнала путем формирования такого сигнала в широкой полосе и размещения главных максимумов спектра широкополосного сигнала в выделяемых для основных сигналов системы ГЛОНАСС частотных диапазонах.
Технический результат достигается за счет создания способа расширения полосы навигационных сигналов ГЛОНАСС с помощью меандровой поднесущей модуляции, включающего формирование сигнала меандровой последовательности поднесущей частоты путем модуляции ВОС-сигнала или DuoBOC-сигнала на несущей частоте, позволяющей разместить группы главных лепестков спектра в выделенных для ГЛОНАСС частотных диапазонах, при этом обеспечивается прием главных лепестков спектра по отдельности одновременно в двух частотных диапазонах в любом сочетании из диапазонов L1, L2, L3.
В частном варианте выполнения способа модулируют ВОС-сигнал или DuoBOC-сигнал с разделением главных лепестков спектра сигнала таким образом, что они будут находиться на несущих частотах сигналов ГЛОНАСС с кодовым разделением в диапазонах L2 и L3.
В другом частном варианте выполнения способа модулируют ВОС-сигнал или DuoBOC-сигнал, причем правая и левая части спектра этого сигнала будет совпадать со спектрами информационных компонент сигналов ГЛОНАСС с кодовым разделением в диапазонах L1 и L2 соответственно.
Заявленное изобретение проиллюстрировано следующими чертежами:
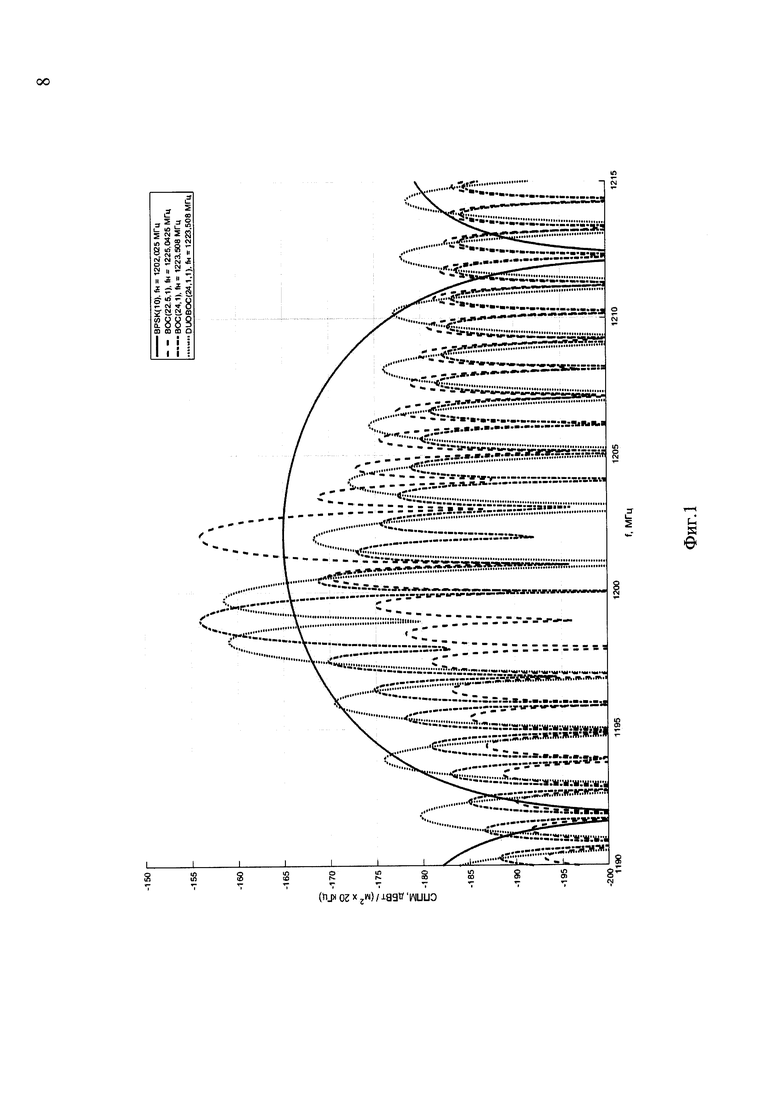
Фиг. 1- спектры сигналов в диапазоне L3 при кодовом разделении сигнала в диапазонах L2 и L3;
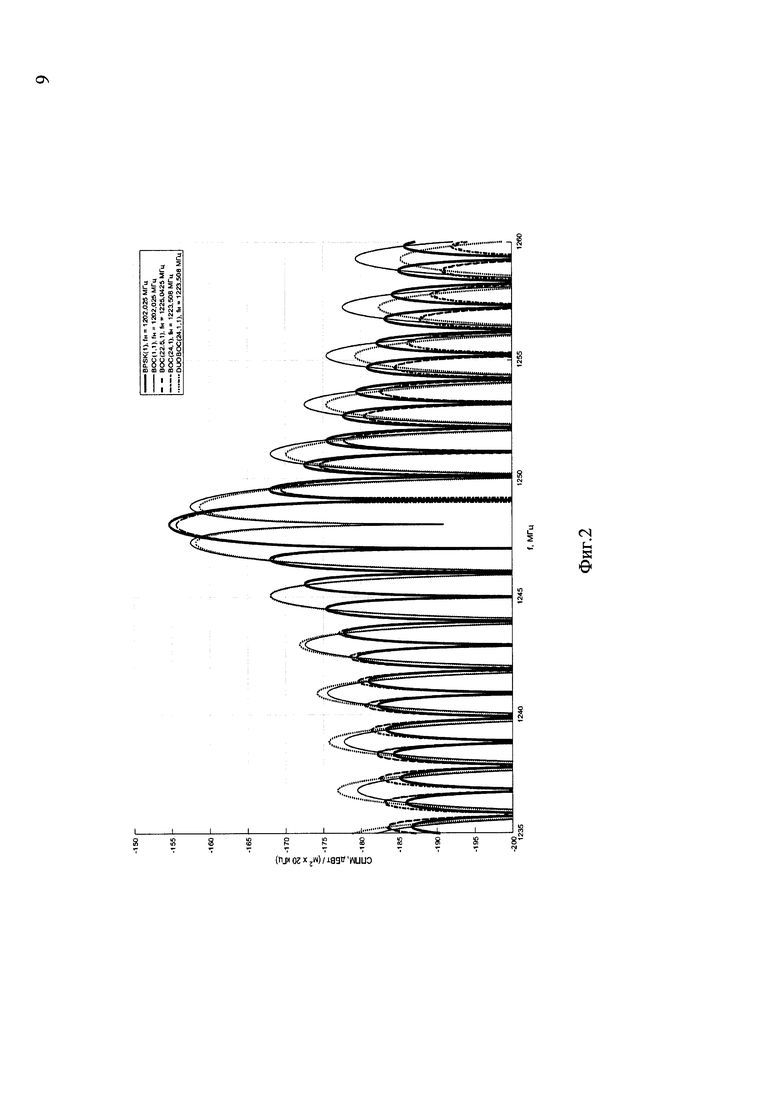
Фиг. 2- спектры сигналов в диапазоне L2 при кодовом разделении сигнала в диапазонах L2 и L3;
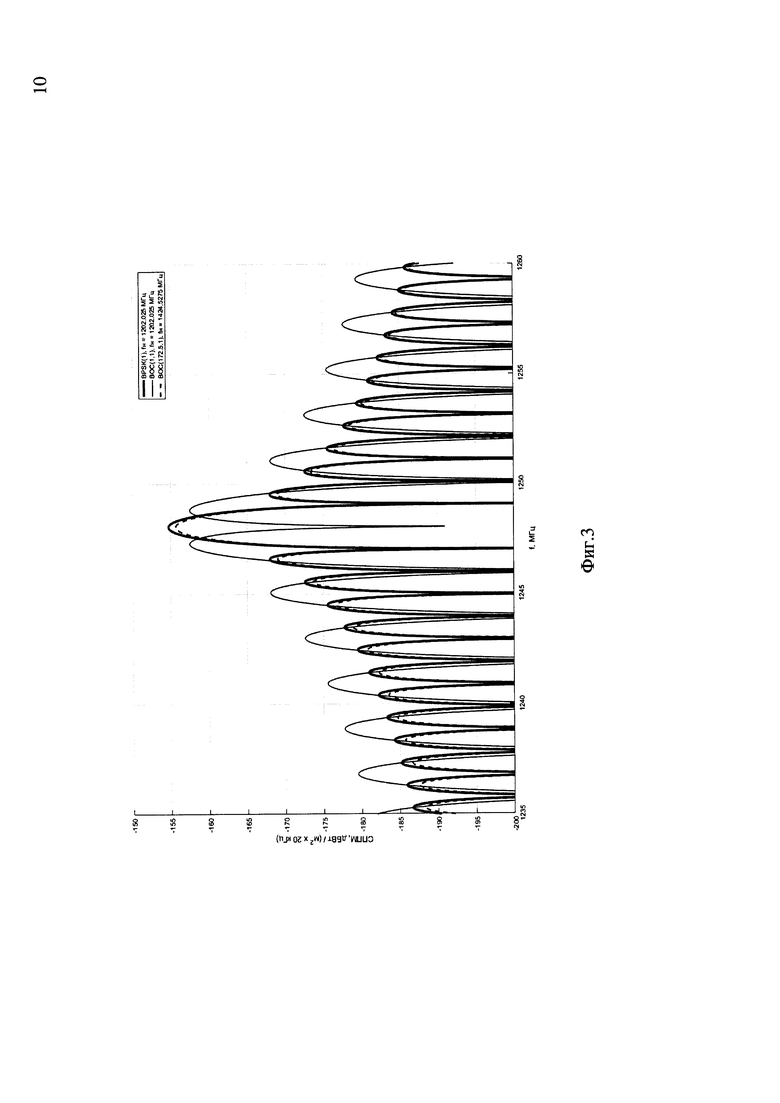
Фиг. 3 - спектры сигналов в диапазоне L2 при кодовом разделении сигнала в диапазонах L1 и L2;
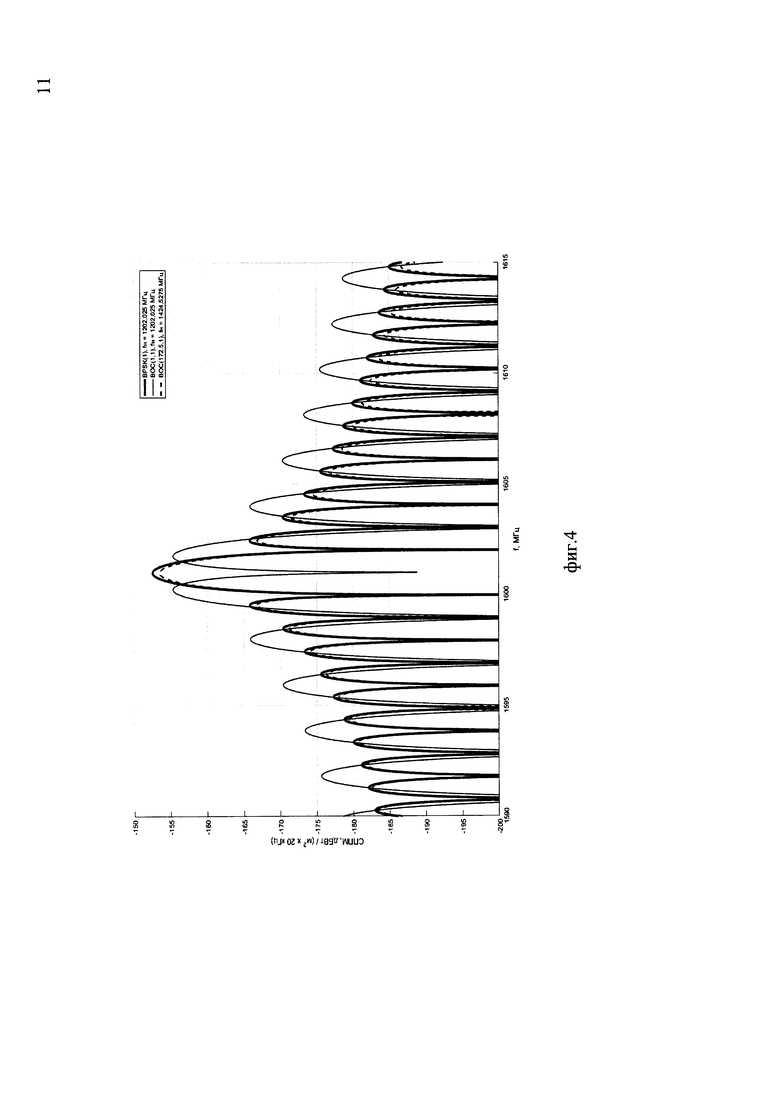
Фиг. 4 - спектры сигналов в диапазоне L1 при кодовом разделении сигнала в диапазонах L1 и L2;
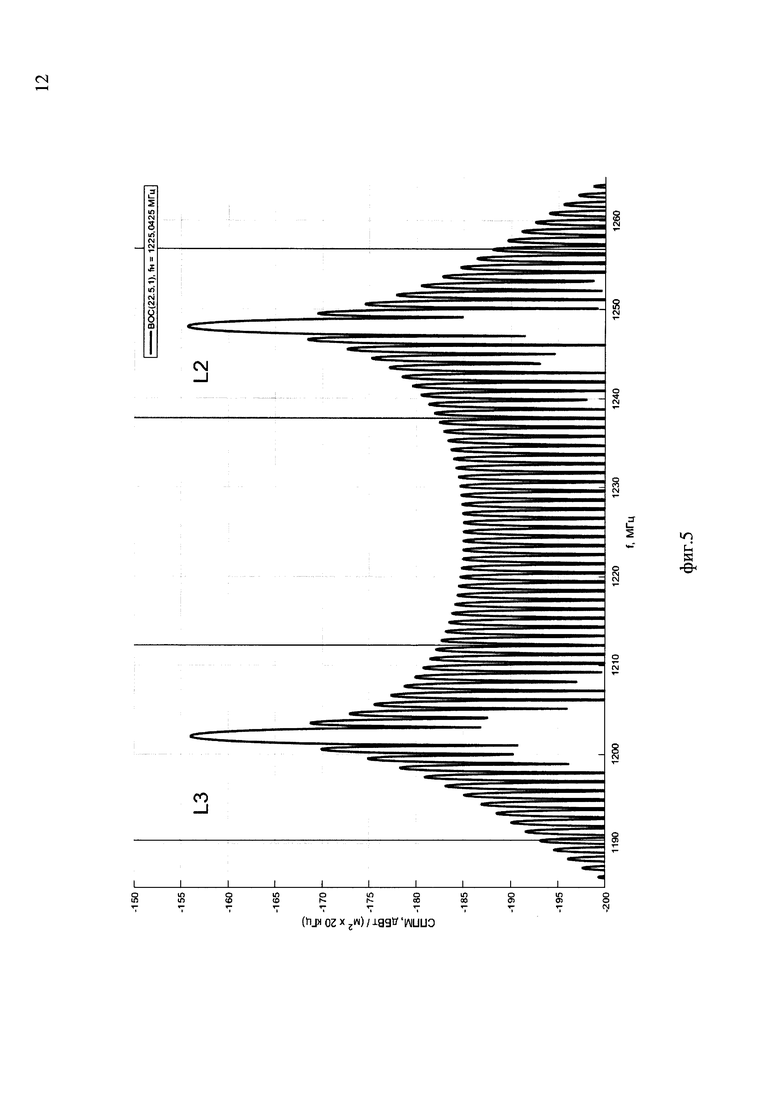
Фиг. 5 - вариант реализации сигналов для диапазонов L2 и L3.
Заявленный способ расширения полосы навигационных сигналов ГЛОНАСС основан на использовании особенностей меандровой поднесущей модуляции.
Наиболее известным вариантом этой модуляции является ВОС (binary offset carrier). В обозначении BOC(m, n) для данных сигналов вводятся соответственно коэффициенты отношения поднесущей частоты и частоты кода к частоте кода С/А системы GPS. Например, в сигнале ВОС(2,1) частота кода соответствует 1.023 МГц, а частота меандра соответствует 2.046 МГц.
Отличие ВОС-сигналов от традиционных шумоподобных сигналов заключается в использовании при формировании сигнала меандровой последовательности поднесущей частоты. При этом сигнал гармонического несущего колебания манипулируется по фазе результатом перемножения псевдослучайной последовательности (ПСП) и поднесущего колебания.
Математически ВОС сигнал записывается следующим образом:

где
А - амплитуда сигнала,
d(t) - двоичные символы информации μ=±1,
П(t) - псевдослучайная последовательность (ПСП),
Sc(t) - аппроксимация поднесущей частоты,
ω - несущая частота сигнала,
ϕ(t) - фаза несущего колебания.
Существует несколько видов аппроксимации гармонического колебания Sc(t) для использования в качестве поднесущей частоты, но чаще всего функцию Sc(t) представляют следующим образом:

где функция 
ωsc=2⋅π⋅fsc - частота поднесущего колебания.
Другой вариант меандровой поднесущей модуляции формируется за счет дополнительной модуляции ВОС-сигнала второй поднесущей частотой [1]. Спектральные характеристики такого класса сигналов будут соответствовать спектральным характеристикам ВОС-сигнала, который взят за основу, но с разнесением спектральных поддиапазонов на величину второй поднесущей частоты. В связи с такими спектральными характеристиками этот класс сигналов, получивший некоторые дополнительные полезные свойства, назван DuoBОС (название характеризует схожесть спектра этого сигнала с двумя разнесенными по частоте ВОС-сигналами). Формирование такого сигнала производится по следующей формуле:

где
А - амплитуда сигнала,
d(t) - двоичные символы информации μ=±1,
П(t) - псевдослучайная последовательность (ПСП),
Sc1 (t) - аппроксимация первой поднесущей частоты,
Sc2 (t) - аппроксимация второй поднесущей частоты,
ω - несущая частота сигнала,
ϕ(t) - фаза несущего колебания.
Для обозначения сигнала DuoBOC(k, m, n) в отличие от ВОС-сигнала дополнительно задается k-коэффициентами отношения второй поднесущей частоты к частоте С/А-кода GPS. Например, сигнал DuoBOC(4,l,l) формируется из ПСП с тактовой частотой 1.023 МГц, первого меандрового колебания с частотой 1.023 МГц и второго меандрового колебания с частотой 4.096 МГц.
Важной особенностью сигналов с меандровой поднесущей модуляцией является то, что значительная часть их мощности сосредоточена в двух группах главных лепестков спектра, между которыми находится глубокий провал. Это позволяет разместить сигнал с меандровой поднесущей модуляцией так, чтобы группы главных лепестков спектра были расположены в выделенных для ГЛОНАСС частотных диапазонах, а провал в середине спектра не нарушал совместимости с другими сигналами, расположенными между диапазонами.
Другой важной особенностью таких сигналов является возможность приема главных лепестков спектра по отдельности. Благодаря этому данные сигналы можно принимать как сложными специализированными приемниками в широкой полосе частот, так и простыми бытовыми приемниками в узкой полосе у одного из главных лепестков.
Для навигационных сигналов ГЛОНАСС выделено три диапазона шириной около 20 МГц каждый. Выход за пределы данных диапазонов невозможен из-за требований совместимости с другими радиотехническими системами, излучающими сигналы в соседних диапазонах.
Сигналы ГЛОНАСС открытого доступа с кодовым разделением размещены следующим образом:
1. в диапазоне L1 (1592,9-1610 МГц) на несущей частоте 1600.995 МГц ВОС(1,1) (пилотная компонента) и BPSK(l) (информационная компонента);
2. в диапазоне L2 (1237,8-1256,8 МГц) на несущей частоте 1248.06 МГц ВОС(1,1) (пилотная компонента) и BPSK(l) (информационная компонента);
3. в диапазоне L3 (1190,35-1212,23 МГц) на несущей частоте 1202.025 МГц BPSK(10).
Заявленный способ может быть осуществлен посредством различных вариантов размещения предлагаемых сигналов в указанных диапазонах. Достаточно просто реализуемым является размещение сигналов в диапазонах L2 и L3. Расстояние между внешними границами этих диапазонов составляет около 67 МГц.
Можно создать сигнал с модуляцией ВОС(22.5,1) на несущей частоте 1225.0425 МГц. Главные лепестки спектра этого сигнала будут находиться на несущих частотах сигналов ГЛОНАСС с кодовым разделением в диапазонах L2 и L3. При этом правая часть спектра данного сигнала будет совпадать со спектром информационной компоненты в диапазоне L2 (см. фиг. 1 и 2).
Можно создать сигнал с модуляцией ВОС(24,1) и DuoBOC(24,l,l) на несущей частоте 1223.508 МГц. При этом правые части спектров данных сигналов будут совпадать со спектрами соответственно информационной и пилотной компоненты сигналов ГЛОНАСС с кодовым разделением в диапазоне L2 (см. фиг. 1 и 2).
Размещение навигационного сигнала между диапазонами L2 и L3 позволяет использовать полосу до 67 МГц.
Гораздо более широкую полосу можно обеспечить, расположив сигналы между диапазонами L1 и L2. Расстояние между внешними границами этих диапазонов составляет около 370 МГц. Сигналы ГЛОНАСС с кодовым разделением обладают одинаковой модуляцией в обоих диапазонах. Благодаря этому является возможной полная замена соответствующих сигналов в отдельных диапазонах на единый широкополосный сигнал.
Так, например, можно создать сигнал с модуляцией ВОС(172.5,1) на несущей частоте 1424.5275 МГц. Правая и левая части спектра этого сигнала будет совпадать со спектрами информационных компонент сигналов ГЛОНАСС с кодовым разделением в диапазонах L1 и L2 соответственно (см. фиг. 3 и 4).
Размещение навигационного сигнала между диапазонами L1 и L2 позволяет использовать полосу до 370 МГц.
Сигналы с меандровой поднесущей модуляцией можно принимать как специализированными приемниками в широкой полосе частот, так и простыми приемниками в узкой полосе у одного из главных лепестков спектра.
Применение навигационных сигналов с расширенной полосой позволит не только значительно повысить потенциальную точность кодовых измерений, но и обеспечит высокую крутизну фронта импульса принимаемого сигнала, что может помочь разрешению целочисленной неоднозначности при измерении фазы несущей.
Используемая литература:
1. Вейцель А.В. Новый класс меандровых шумоподобных радиосигналов для радионавигационных систем // Вестник МАИ. 2009. т. 16. №7.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РАСШИРЕНИЯ ПОЛОСЫ НАВИГАЦИОННЫХ СИГНАЛОВ ГЛОНАСС | 2021 |
|
RU2791443C1 |
| Способ формирования группового навигационного сигнала ГЛОНАСС | 2017 |
|
RU2660126C1 |
| СИГНАЛЫ, СИСТЕМА И СПОСОБ МОДУЛЯЦИИ | 2007 |
|
RU2441255C2 |
| Способ измерения мощности навигационных сигналов с частотным и кодовым разделением | 2022 |
|
RU2790658C1 |
| Способ и устройство для нелинейного уплотнения навигационного сигнала ГЛОНАСС | 2018 |
|
RU2686660C1 |
| СИГНАЛЫ, СИСТЕМА И СПОСОБ МОДУЛЯЦИИ | 2004 |
|
RU2385466C2 |
| ПРИЕМОИНДИКАТОР СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 1993 |
|
RU2067771C1 |
| Способ устранения влияния узкополосной и импульсной помех на результаты измерений энергетических характеристик радионавигационных сигналов | 2017 |
|
RU2724620C2 |
| МНОГОКАНАЛЬНЫЙ ПРИЕМОИНДИКАТОР СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 1994 |
|
RU2079148C1 |
| УСТРОЙСТВО ДЛЯ ПРИЕМА СИГНАЛОВ СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 1998 |
|
RU2145422C1 |
Изобретение относится к области радионавигации, а именно к способам расширения спектра навигационных радиосигналов спутниковых навигационных систем, и может быть использовано при создании навигационной аппаратуры системы ГЛОНАСС, предназначенной для передачи навигационных сигналов с частотным и кодовым разделением. Технический результат состоит в увеличении полосы навигационных сигналов. Для этого способ расширения полосы навигационных сигналов ГЛОНАСС с помощью меандровой поднесущей модуляции включает формирование сигнала меандровой последовательности поднесущей частоты путем модуляции BOC-сигнала или DuoBOС-сигнала на несущей частоте, позволяющей разместить группы главных лепестков спектра в выделенных для ГЛОНАСС частотных диапазонах, при этом обеспечивается прием главных лепестков спектра по отдельности одновременно в двух частотных диапазонах в любом сочетании из диапазонов L1, L2, L3, 2 з.п. ф-лы, 5 ил.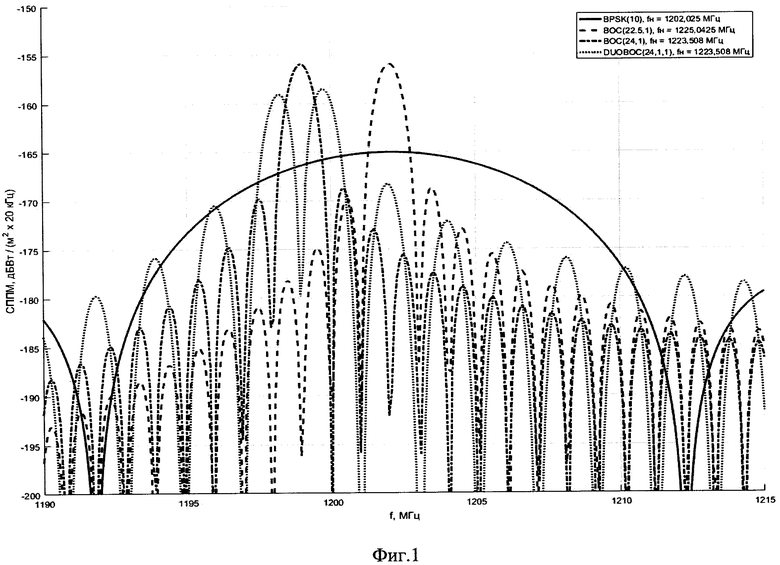
1. Способ расширения полосы навигационных сигналов ГЛОНАСС с помощью меандровой поднесущей модуляции, включающий формирование сигнала меандровой последовательности поднесущей частоты путем модуляции на несущей частоте с использованием ВОС-сигнала

где
А - амплитуда сигнала,
d(t) - двоичные символы информации μ=±1,
П(t) - псевдослучайная последовательность (ПСП),
Sc(t) - аппроксимация поднесущей частоты,
ω - несущая частота сигнала,
ϕ(t) - фаза несущего колебания, или DuoBOC-сигнала
 где
где
A - амплитуда сигнала,
d(t) - двоичные символы информации μ=±1,
П(t) - псевдослучайная последовательность (ПСП),
Scl (t) - аппроксимация первой поднесущей частоты,
Sc2 (t) - аппроксимация второй поднесущей частоты,
ω - несущая частота сигнала,
ϕ(t) - фаза несущего колебания,
позволяющей в результате такой модуляции разместить группы главных лепестков спектра в выделенных для сигналах системы ГЛОНАСС частотных диапазонах и обеспечить прием основных навигационных сигналов системы ГЛОНАСС одновременно в двух частотных диапазонах в любом сочетании из диапазонов L1, L2, L3.
2. Способ по п. 1, отличающийся тем, что модулируют ВОС-сигнал или DuoBOC-сигнал с разделением главных лепестков спектра сигнала таким образом, что они будут находиться на несущих частотах сигналов ГЛОНАСС с кодовым разделением в диапазонах L2 и L3.
3. Способ по п. 1, отличающийся тем, что модулируют ВОС-сигнал или DuoBOC-сигнал, причем правая и левая части спектра (максимумы спектра) этого сигнала будут совпадать с частотными диапазонами сигналов ГЛОНАСС с кодовым разделением в диапазонах L1 и L2 соответственно.
| УСТРОЙСТВО ДЛЯ ОДНОВРЕМЕННОГО ПРИЕМА СИГНАЛОВ РАЗЛИЧНЫХ СИСТЕМ СПУТНИКОВОЙ НАВИГАЦИИ | 2015 |
|
RU2611069C1 |
| СПОСОБ ОБРАБОТКИ ПОВЕРХНОСТИ ТИТАНОВЫХСПЛАВОВ | 0 |
|
SU261091A1 |
| ПРИЕМНИК СПУТНИКОВОЙ НАВИГАЦИИ С УСТРОЙСТВОМ БЫСТРОГО ПОИСКА НАВИГАЦИОННЫХ СИГНАЛОВ В УСЛОВИЯХ ВЫСОКОЙ ДИНАМИКИ ОБЪЕКТА | 2006 |
|
RU2341898C2 |
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |

