Область техники, к которой относится изобретение
Данное изобретение относится к способу получения и ресиверу для радионавигационного сигнала, модулированного СВОС распространяющимся колебательным сигналом.
Уровень техники изобретения
Системы спутникового позиционирования, такие как GPS (Система глобального позиционирования), Galileo, ГЛОНАСС, QZSS и другие используют модулированные навигационные сигналы с расширенным спектром ("spread-spectrum"). Эти сигналы по существу несут псевдослучайные коды, состоящие из числовых последовательностей, с периодическим повторением, основной функцией которых является разрешение множественного доступа с кодовым распределением (CDMA) и обеспечение точного измерения времени прохождения для переданного спутником сигнала. Попутно спутниковые сигналы позиционирования могут также нести полезные данные.
Что касается GPS, навигационные сигналы передаются на полосе частот L1 с центром на 1575.42 МГц и на полосе частот L2 с центром 1227.6 МГц. Полоса L5 с центром 1176.45 МГц будет добавлена во время модернизации GPS. Спутники группировки Galileo будут передавать в диапазонах: E2-L1-E1 (участок среднего диапазона L1 аналогичен участку для GPS), Е5а (который согласно номенклатуре Galileo является диапазоном L5, предназначенным для GPS), E5b (с центром на частоте 1207.14 МГц) и Е6 (с центром на частоте 1278.75 МГц).
Навигационные сигналы формируются модулированием центральных (несущих) частот. Различные схемы модуляции уже были введены или, по меньшей мере, рассматриваются для создания навигационных сигналов. Чтобы гарантировать возможность взаимодействия и совместимость между системами GPS и Galileo, Соединенные Штаты Америки и Европейский Союз выработали соглашение по определенным пунктам, касающимся схем модуляции сигнала в диапазоне L1, который используется обеими системами. Более подробные сведения о предлагаемых схемах модуляции можно получить из публикации „МВОС: Новая оптимизированная модуляция распространения, рекомендованная для GALILEO L1 OS и GPS L1C'', Хейн и др. (''МВОС: The new optimized spreading modulation recommended for GALILEO L1 OS и GPS L1C'' Hein et al.), InsideGNSS, май/июнь 2006, стр. 57-65.
Одна из схем модуляции, выбранная в качестве кандидата для модулирования сигнала Galileo L1, известна под названием «СВОС модуляция» (от «Composite Binary Offset Carrier»/«Модуляция по методу комбинированной бинарной смещенной несущей»). СВОС распространяющийся сигнал, модулирующий несущую, является линейной комбинацией первого ВОС (1, 1) сигнала и второго ВОС (m, 1) сигнала. ВОС - это аббревиатура для «Binary Offset Carrier»/«Модуляция по методу бинарной смещенной несущей». В целом, ВОС (n, m) - это функция времени t, определяемая по формуле:
BOC(n,m)(t)=Cm(t)·sign[sin(2πfsct)],
где Cm(t) - это псевдослучайный код скорости передачи элементов сигнала m×1.023 Mcps, при условии, что значениями +1 или -1 и fsc является частота n×1.023 МГц. Одно условие, применимое к n и m, - это то, что соотношение 2n/m является целым числом. В случае с Galileo Open Service (OS) код скорости передачи данных установлен на 1.023 Mcps (мегачип в секунду). В этом случае СВОС сигнал может быть записан как:
СВОС(n1,1)(t)=V·BOC(1,1)(t)+W·ВОС(n1,1)(t),
где V и W - действительные коэффициенты, определяющие относительный вес компонентов ВОС (1,1) и ВОС (m, 1). В случае с сигналом СВОС, два компонента ВОС несут идентичный псевдослучайный код.
Сигнал СВОС может рассматриваться как особый член семейства комбинированных сигналов, описанных, например, в Европейской заявке на патент № 05290083.4. Этот же документ также описывает способы для получения сигнала, модулированного комбинированным сигналом. Согласно первому описанному способу, осуществляется корреляция входного сигнала, модулированного сигналом СВОС и местным опорным сигналом этого сигнала СВОС. Это решение включает в себя генерацию опорного сигнала СВОС в ресивере. Поэтому необходимо осуществлять четырехуровневую дискретизацию на входе коррелятора, которая требует, по меньшей мере, 2-х битовой архитектуры. Согласно второму описанному способу, корреляции осуществляются соответственно между входным сигналом и местным опорным сигналом первого компонента ВОС и между входным сигналом и местным опорным сигналом второго компонента ВОС. Затем результаты двух корреляций объединяются. В этом решении местные опорные сигналы являются однобитовыми, что может рассматриваться предпочтительным относительно первого решения. Цена, которую необходимо заплатить, - это удвоение количества операций корреляций по сравнению с первым решением, все остальные вещи остаются неизменными.
Цель изобретения
Целью данного изобретения является разработка нового способа для получения радионавигационного сигнала, модулированного комбинированным распространяющимся сигналом.
Эта цель достигнута посредством способа согласно пункту 1 формулы изобретения.
Общее описание изобретения
Для получения навигационного сигнала, модулированного комбинированным колебательным сигналом, указанный комбинированный колебательный сигнал содержит линейную комбинацию с действительнозначными коэффициентами компонента ВОС (n1, m) и компонента ВОС (n2, m), причем n1 отличается от n2. Предлагается осуществлять корреляцию между местным колебательным сигналом и комбинированным колебательным сигналом в течение интервала времени длительности Т. Согласно важному аспекту изобретения, местный колебательный сигнал является двоичным колебательным сигналом, сформированным в течение интервала времени чередующейся последовательностью, содержащей по меньшей мере один сегмент ВОС (n1, m) колебательного сигнала и по меньшей мере один сегмент ВОС (n2, m) колебательного сигнала, при этом по меньшей мере один сегмент ВОС (n1, m) имеет общую длительность αT, причем α строго составляет значение между 0 и 1, и по меньшей мере один сегмент ВОС (n2, m) имеет общую длительность (1-α)Т. В отличие от обсужденных выше способов получения, способ согласно изобретению не затрагивает колебательный сигнал с более чем двумя уровнями и не требует большего количество корреляторов.
В предпочтительном варианте осуществления изобретения, компоненты ВОС (n1, m) и ВОС (n2, m) несут идентичный псевдослучайный код, и местный колебательный сигнал несет по меньшей мере одну предварительно определенную часть указанного псевдослучайного кода. Псевдослучайные коды, используемые в спутниковой радионавигации, являются либо полностью предварительно определенными кодами (в случае пилотного канала), либо кодами, содержащими предварительно определенную часть и часть «данных» (в случае канала данных). Часть «данных» передается с символьной скоростью, заметно меньшей, чем код скорости передачи элементов предварительно определенной части.
Если n2=1 и m=1, линейная комбинация является сигналом СВОС (n1,1), определяемой по формуле:
СВОС(n1,1)=V·BOC(1,1)+W·ВОС(n1,1),
где V и W - это действительнозначные весовые коэффициенты. Что касается СВОС кандидата для будущего сигнала Galileo OS L1, кроме того, было согласовано, что n1=6. В некоторых случаях может оказаться предпочтительным, для получения сигнала СВОС (n1, 1), принять α по меньшей мере примерно равным опорной величине W/(V+W). В других случаях, для α более подходящим может быть меньшее или большее значение, чем это опорное значение.
Местный колебательный сигнал может содержать чередующуюся последовательность, содержащую один сегмент ВОС (n1, m) колебательного сигнала и один сегмент ВОС (n2, m) колебательного сигнала. В другом варианте осуществления изобретения чередующаяся последовательность содержит множество сегментов ВОС (n1, m) колебательного сигнала общей длительностью αT и/или множество сегментов ВОС (n2,m) колебательного сигнала общей длительностью (1-α)T.
Для осуществления способа согласно изобретению предлагается ресивер, который способен получать радионавигационный сигнал, модулированный комбинированным колебательным сигналом, при этом комбинированный колебательный сигнал содержит линейную комбинацию с действительнозначными коэффициентами компонента ВОС (n1, m) и компонента ВОС (n2, m), причем n1 отличается от n2, при этом ресивер содержит набор генераторов местного колебательного сигнала и корреляторы для осуществления корреляции между местным колебательным сигналом и комбинированным колебательным сигналом в течение интервала времени продолжительностью T. В частности, генераторы местного колебательного сигнала выполнены для генерации местного двоичного колебательного сигнала, образованного в течение указанного временного интервала чередующейся последовательности, содержащей по меньшей мере один сегмент ВОС (n1, m) колебательного сигнала и по меньшей мере один сегмент ВОС (n2, m) колебательного сигнала, при этом по меньшей мере один сегмент ВОС (n1, m) имеет общую длительность α, причем значение α находится строго между 0 и 1, и по меньшей мере один сегмент ВОС (n2, m) имеет общую продолжительность (1-α)T.
Согласно предпочтительному осуществлению изобретения, ресивер содержит блок управления, воздействующий на генераторы местного колебательного сигнала с тем, чтобы оказывать влияние (а) на временный порядок сегмента(ов) ВОС (n1, m) и сегмента(ов) ВОС (n2, m) и/или (b) на длительность сегмента(ов) ВОС (n1, m) и сегмента(ов) ВОС (n2, m). В частности, этот вариант осуществления является предпочтительным для ресивера, приспособленного к будущим сигналам Galileo OS L1 и GPS L1C. Это происходит из-за того, что модуляция, предназначенная для последнего сигнала, является модуляцией ВОС с временным мультиплексированием (ТМВОС, ВОС с временным мультиплексированием), имеющая компонент ВОС (1,1) и компонент ВОС (6,1). Если модуляция, выбранная Galileo OS L1, является модуляцией СВОС (6,1), то затем тем же ресивером будет возможно получать оба сигнала. Управляя временным порядком сегментов ВОС (1,1) и ВОС (6,1) и/или их длительностью, блок управления может оптимизировать местный колебательный сигнал для получения либо ТМВОС от GPS, либо СВОС от Galileo.
Краткое описание чертежей
Предпочтительный вариант осуществления изобретения будет описан ниже с помощью не ограничивающего примера, со ссылкой на прилагаемые чертежи, на которых показаны:
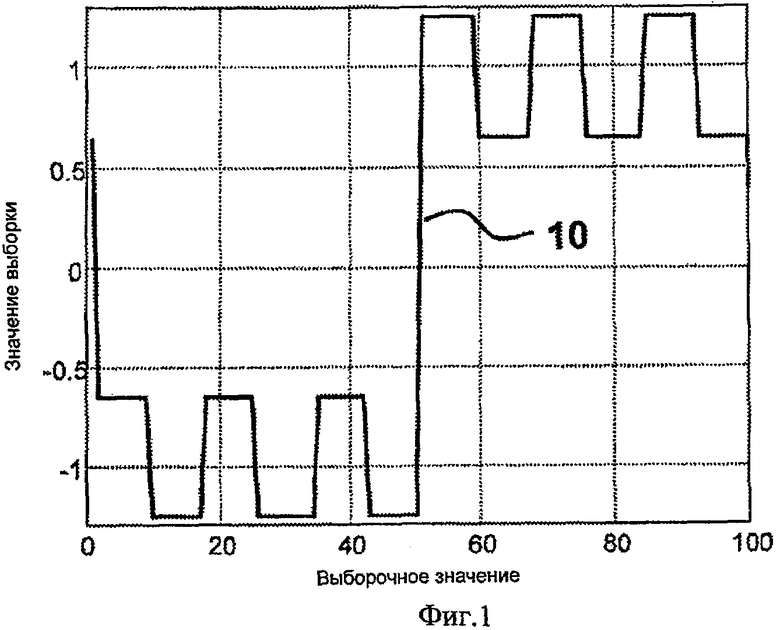
Фиг.1 - временное представление колебательного сигнала СВОС (6,1);
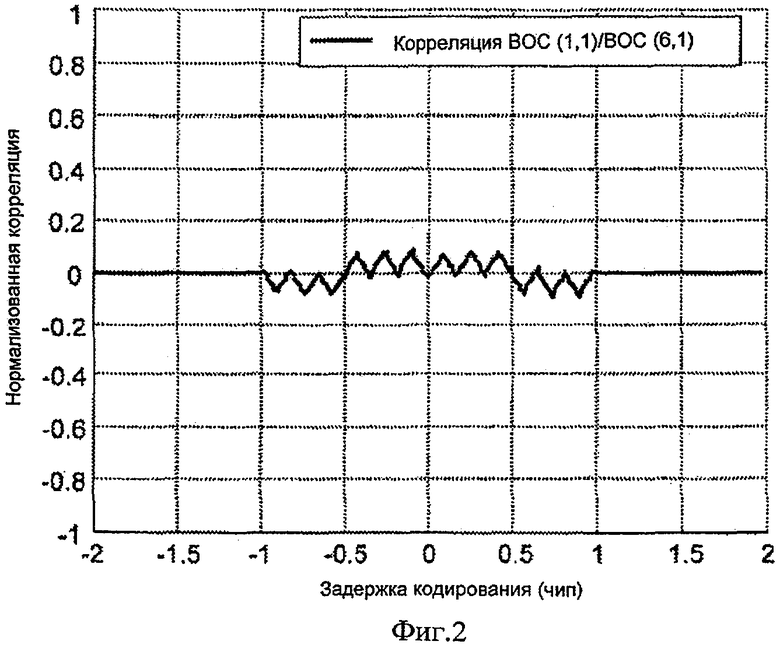
Фиг.2 - изображение корреляции между колебательным сигналом ВОС (1,1) и колебательным сигналом ВОС (6,1);
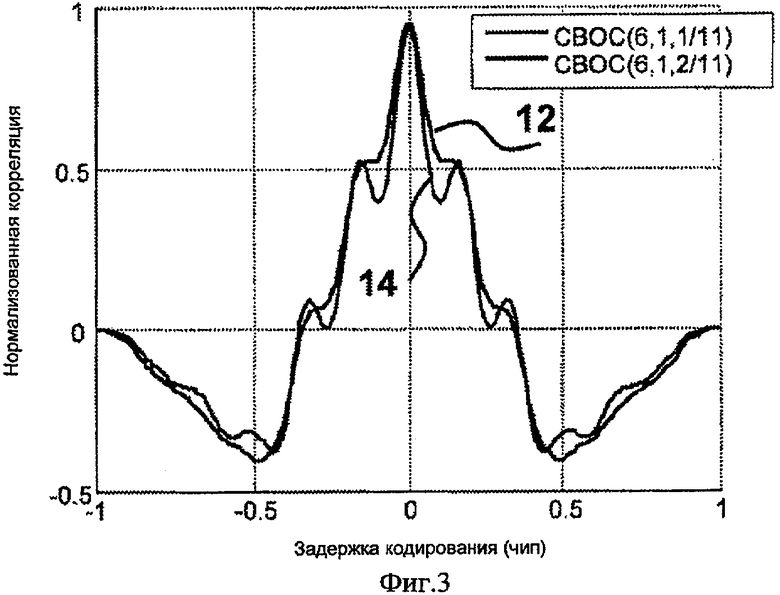
Фиг.3 - изображение автокорреляций двух колебательных сигналов СВОС (6,1), имеющих разные весовые коэффициенты;
Фиг.4 - временное изображение местного двоичного колебательного сигнала, который может быть использован в способе согласно изобретению;
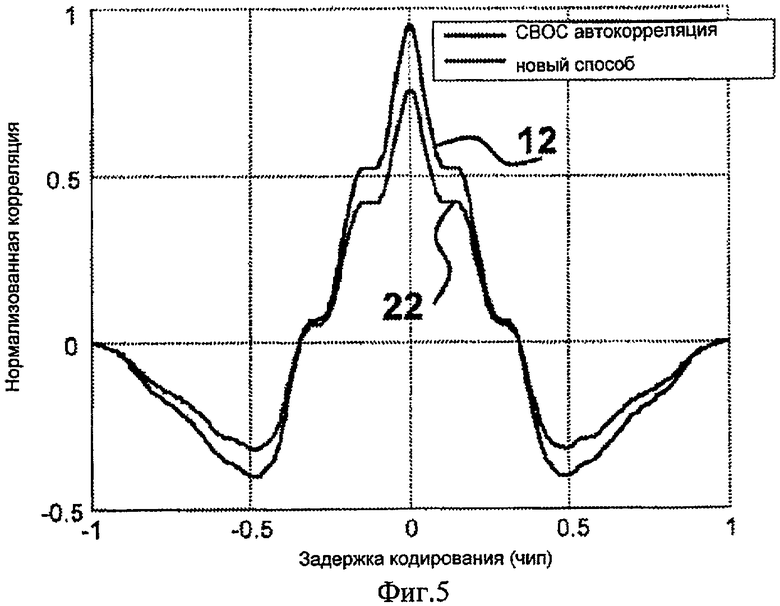
Фиг.5 показывает сравнение между функцией автокорреляции СВОС (6, 1, 1/11) и функцией корреляции между СВОС (6,1, 1/11) и местным двоичным колебательным сигналом, как показано на фигуре 4;
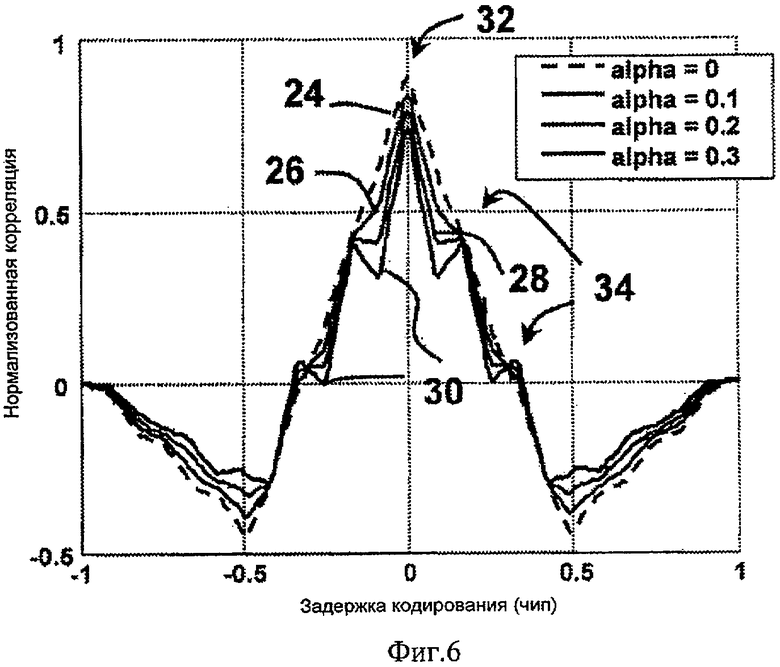
Фиг.6 показывает различные функции корреляции между СВОС(6,1, 2/11) и местным двоичным колебательным сигналом;
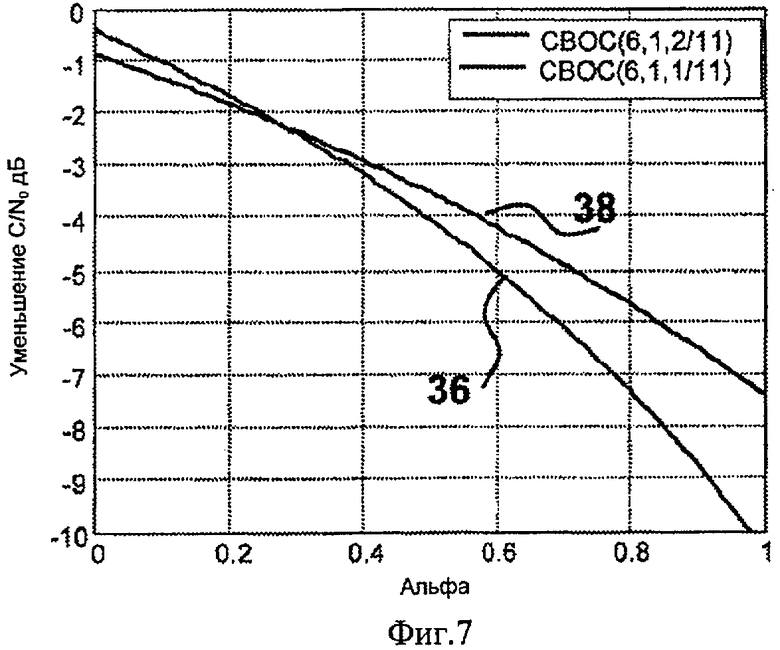
Фиг.7 - изображение уменьшения соотношения С/Nо в качестве функции от параметра α в случае СВОС (6,1, 1/11) и СВОС (6,1, 2/11);
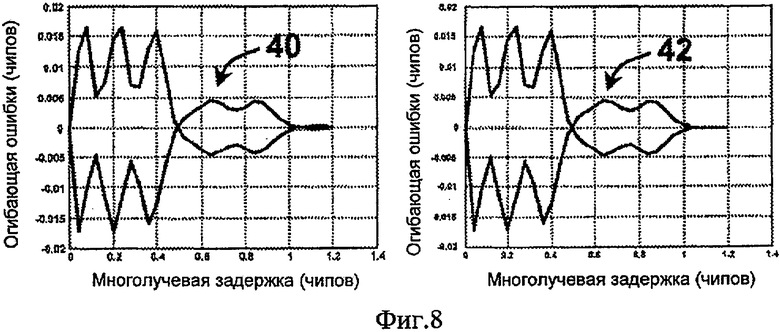
Фиг.8 показывает сравнение огибающей ошибки при многолучевом распространении в случае, если местный колебательный сигнал является комбинированным колебательным сигналом СВОС (6,1), и огибающей ошибки при многолучевом распространении в случае, если местный колебательный сигнал является двоичным колебательным сигналом, как показано на фигуре 4;
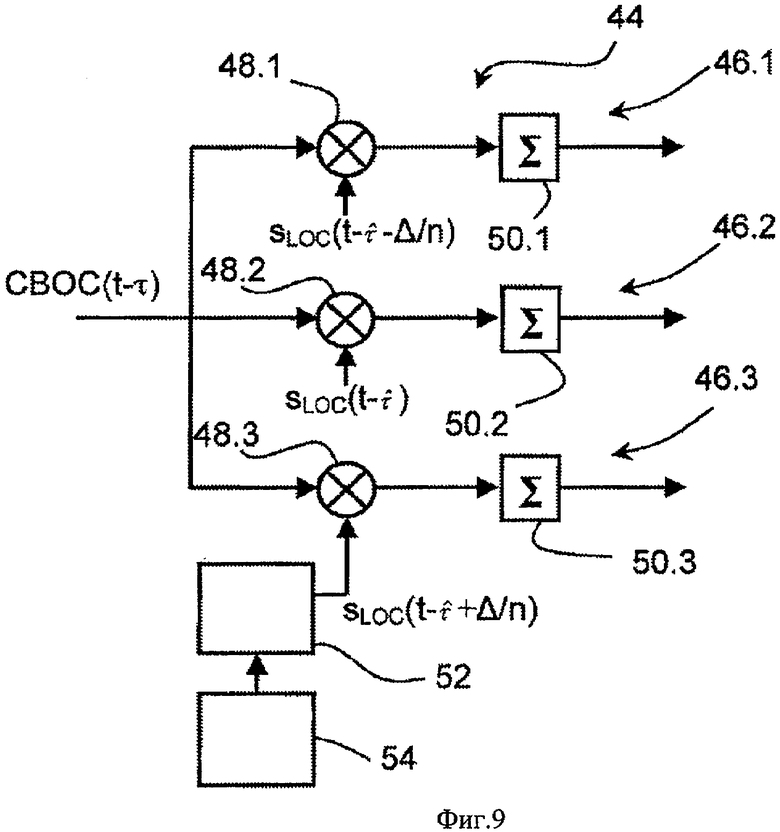
Фиг.9 - диаграмма ресивера, выполненного с возможностью получения комбинированного сигнала.
Описание предпочтительного варианта осуществления
На фиг.1 показан колебательный сигнал 10 СВОС (6,1), определяемый формулой:
CBOC(6,1)(t)=V·BOC(1,1)(t)-W·BOC(6,1)(t)
где V и W - весовые коэффициенты. Следующие обозначения будут использованы ниже:
BOC(1,1)(t)=Cp(t)·x(t)
и
BOC(6,1)(t)=Cp(t)·y(t),
где Cp(t) представляет собой псевдослучайный код, общий для двух компонентов.
Для сигнала Galileo OS L1 рассматриваются разные значения V и W, в зависимости от мультиплексной схемы этого сигнала. Более подробные сведения можно найти в InsideGNSS, в статье, авторами которой являются Хейн и др. (Hein et al.), полная ссылка на которую приведена в введении.
Чтобы ввести некоторые обозначения и лучше объяснить преимущества изобретения, ниже будет рассмотрен способ отслеживания сигнала 10 СВОС, принцип которого описан в европейской заявке на патент № 05290083.4. В этом способе существуют две корреляции, осуществляемые параллельно: одна - с местным опорным сигналом ВОС (1,1) и одна - с местным опорным сигналом ВОС (6,1). Местные опорные сигналы как изложены ниже:
 ,
,
 ,
,
 ,
,
 ,
,
где индексы I и Q показывают «синфазные» и «квадратурные» компоненты местных опорных сигналов, f0 - это несущая частота и  фаза. Когда сигнал СВОС коррелирован с sI1, то получается следующее:
фаза. Когда сигнал СВОС коррелирован с sI1, то получается следующее:

I1=(VRBOC(1,1)(ετ)-WRBOC(1,1)/BOC(6,1)(ετ))cos(εϕ),
где  - это фаза псевдослучайного кода местного опорного сигнала, оцененного из фазы τ псевдослучайного кода полученного сигнала,
- это фаза псевдослучайного кода местного опорного сигнала, оцененного из фазы τ псевдослучайного кода полученного сигнала,  фаза несущей местного опорного сигнала, оцененная из фазы ϕ несущей полученного сигнала, Т - длительность интеграционного интервала, RBOC(1,1) - функция автокорреляции сигнала ВОС (1,1), RBOC(1,1)/BOC(6,1) - функция корреляции между сигналом ВОС (1,1) и сигналом ВОС (6,1),
фаза несущей местного опорного сигнала, оцененная из фазы ϕ несущей полученного сигнала, Т - длительность интеграционного интервала, RBOC(1,1) - функция автокорреляции сигнала ВОС (1,1), RBOC(1,1)/BOC(6,1) - функция корреляции между сигналом ВОС (1,1) и сигналом ВОС (6,1),  и
и  .
.
Таким же образом можно записать:
Q1=(VRBOC(1,1)(ετ)-WRBOC(1,1)/BOC(6,1)(ετ))sin(εϕ),
I2=(VRBOC(1,1)/BOC(6,1)(ετ)-WRBOC(6,1)(ετ))cos(εϕ),
Q2=(VRBOC(1,1)/BOC(6,1)(ετ)-WRBOC(6,1)(ετ))sin(εϕ),
где RBOC(1,6) - это автокорреляция сигнала ВОС (6,1).
Рекомбинируя корреляции и используя тот факт, что корреляция между сигналом ВОС (1,1) и сигналом ВОС (6,1) является симметричной, как показано на фиг.2, найдена функция автокорреляции СВОС:
I=VI1-WI2=(V2RBOC(1,1)(ετ)-W2RBOC(6,1)-2VWRBOC(1,1)/BOC(6,1)(ετ))cos(εϕ)
и
Q=VQ1-WQ2=(V2RBOC(1,1)(ετ)-W2RBOC(6,1)-2VWRBOC(1,1)/BOC(6,1)(ετ))sin(εϕ)
Автокорреляции 12, 14 двух сигналов СВОС показаны на фигуре 3. Предполагая, что каждый из каналов данных и контрольных каналов несет 50% мощности сигнала, индексы 1/11 и 2/11 обозначают мультиплексную схему, используемую для радионавигационного сигнала, и ссылаются на определенный вес компонентов ВОС (1,1) и ВОС (6,1). Для СВОС (6,1, 1/11), V=0.383998 и W=0.121431, в то время как для СВОС (6,1, 2/11), V=0.358235 и W=0.168874. Ссылочная позиция 12 обозначает функцию автокорреляции в случае СВОС (6,1, 1/11), а ссылочная позиция 14 обозначает функцию автокорреляции в случае СВОС (6,1, 2/11).
Недостатком вышеописанного способа является количество корреляторов, необходимых для его осуществления. Данное изобретение предлагает для получения сигнала 10 СВОС (6,1), определенного выше, осуществление корреляции входного сигнала с помощью местного колебательного сигнала 16 с временным мультиплексированием, который содержит сегмент или несколько сегментов чистого сигнала ВОС (1,1) и сегмент или несколько сегментов чистого сигнала ВОС (6,1). На фигуре 4 показано временное изображение местного колебательного сигнала SLOC(t), который в начале интеграционного интервала имеет сегмент 18 сигнала ВОС (6,1) и в конце интеграционного интервала имеет сегмент 20 сигнала ВОС (1,1). Местный колебательный сигнал 16 имеет только два значения (двоичный колебательный сигнал), и поэтому может быть закодирован в один бит.Местный колебательный сигнал 16 несет известную часть псевдослучайного кода, модулирующего сигнал СВОС (6,1). Переходы значения псевдослучайного кода могут быть идентифицированы на x-координате 4.07 и 4.11 фигуры 4. Следует отметить, что местный колебательный сигнал 16 заметно отличается от комбинированного колебательного сигнала, модулирующего входной радионавигационный сигнал 10.
Пусть Т обозначает длительность интеграционного интервала, αT - общую длительность сегмента(ов) 18 чистого сигнала ВОС (6,1) с 0<α<1, βT - общую длительность сегмента(ов) 20 чистого сигнала ВОС (1,1) с β=1-α. Чтобы проанализировать результат корреляции между радионавигационным сигналом, модулированным колебательным сигналом 10 СВОС (6,1), и двоичным местным колебательным сигналом 16, корреляция может быть разложена:

Взглянув на то, что было рассмотрено в предыдущем примере, и предположив, что последовательности псевдослучайного кода, соответствующие интервалам [0, αT] и [αT, T], сами являются приближенными значениями к псевдослучайным кодам, может быть осуществлена следующая аппроксимация:
IBOC(6,1)=α(VRBOC(1,1)/BOC(6,1)(ετ)-WRBOC(6,1)(ετ))cos(εϕ),
QBOC(6,1)=α(VRBOC(1,1)/BOC(6,1)(ετ)-WRBOC(6,1)(ετ))sin(εϕ),
IBOC(1,1)=β(VRBOC(1,1)(ετ)-WRBOC(1,1)/BOC(6,1)(ετ))cos(εϕ),
и
QBOC(1,1)=(VRBOC(1,1)(ετ)-WRBOC(1,1)/BOC(6,1)(ετ))sin(εϕ).
Поэтому корреляция становится:
I=IBOC(1,1)-IBOC(6,1)=(βVRBOC(1,1)(ετ)-(βW+αV)RBOC(1,1)/BOC(6,1)(ετ)+αWRBOC(6,1)(ετ))cos(εϕ)
Q=QBOC(1,1)-QBOC(6,1)=(βVRBOC(1,1)(ετ)-(βW+αV)RBOC(1,1)/BOC(6,1)(ετ)+αWRBOC(6,1)(ετ))sin(εϕ)
Можно увидеть, что для того, чтобы добиться, вплоть до мультипликативного коэффициента, того же самого относительного вклада функций автокорреляции колебательных сигналов ВОС (1,1) и ВОС (6,1) в функции 12 или 14 автокорреляции, необходимо, чтобы α=0.2403 и β=0.7597. На фигуре 5, с одной стороны, показана функция 12 автокорреляции СВОС (6,1, 1/11), которая уже была показана на фигуре 2, и, с другой стороны, функция 22 автокорреляции между СВОС (6,1, 1/11) и местным двоичным сигналом 16 с α=0.2403 и β=0.7597. Что касается появления местного двоичного сигнала 16, это означает, что из 4096 чипов псевдослучайного кода, примерно 984 формируют сегмент(ы) сигнала ВОС (6,1) и 3112 формируют сегмент(ы) сигнала ВОС (1,1).
В случае СВОС (6,1, 2/11), α=W/(V+W) приводит к α=0.3204 и β=0.6796. В этом случае из 4096 чипов псевдослучайного кода примерно 1312 формируют сегмент(ы) сигнала ВОС (6,1) и 2784 формируют сегмент(ы) сигнала ВОС (1,1).
На фигуре 6 показан ряд функций 24, 26, 28 и 30 корреляции между радионавигационным сигналом, модулированным с помощью схемы 10 СВОС (6,1, 2/11) и местным двоичным колебательным сигналом 16 с временным мультиплексированием, полученным для различных значений параметра α. Можно увидеть, что значение α делает возможным воздействовать на форму функции корреляции. С выбором α=0 получают кривую 24, с α=0,1 кривую 26, с α=0,2 кривую 28 и с α=0,3 кривую 30. В зависимости от значения α, центральные пики 32 и вторичные пики 34 являются более или менее отчетливыми.
На фигуре 7 показано уменьшение соотношения C/N0, т.е. соотношение полученного сигнала к плотности спектра шумов. Уменьшение C/N0 может быть рассчитано по формуле:

так как RBOC(1,1)/BOC(6,1) симметрична и имеет значение 0 при 0. Альтернативно, это может быть записано следующим образом:

Фигура 7 показывает уменьшение C/N0 для случаев СВОС (6,1, 1/11) (кривая 36) и СВОС (6,1,2/11) (кривая 38). Можно увидеть, что для случаев, где α=0, что соответствует случаю, когда местный колебательный сигнал является чистым сигналом ВОС (1,1), уменьшение, связанное с силовой частью сигнала, выделенного ВОС (6,1) (1/11 и 2/11, соответственно), действительно происходит. В случае СВОС (6,1, 1/11) с α=0,2403 происходит уменьшение C/N0 1,97 дБ. В случае СВОС (6,1, 2/11) с α=0,3204 происходит уменьшение C/N0 2,56 дБ.
На примере СВОС (6,1, 1/11) фигура 8 слева показывает огибающую 40 ошибки при многолучевом распространении в случае, когда местный колебательный сигнал является соответствующим комбинированным колебательным сигналом СВОС (6,1), и справа показывает огибающую 42 ошибки при многолучевом распространении в случае, когда местный сигнал является двоичным колебательным сигналом с временным мультиплексированием с α=0,2403. Следует отметить, что огибающие 40, 42 ошибки при многолучевом распространении по существу идентичны.
Остается отметить, что получение функции корреляции, которая схожа в пределах одного коэффициента пропорциональности с функцией автокорреляции СВОС, не является единственным критерием для оптимизации значения α. Это происходит потому, что местный двоичный колебательный сигнал может быть также, в частности, выбран на основе критериев: (а) минимизация уменьшения соотношения C/N0, (b) минимизация ошибки слежения из-за гауссова белого шума, (с) оптимизация формы ошибки функции корреляции между входным сигналом и местным колебательным сигналом и (d) уменьшение огибающей ошибок. Поэтому с целью выбора значения α доступна определенная степень свободы.
На фигуре 9 показана упрощенная диаграмма канала приема ресивера 44, выполненного с возможностью получения комбинированного сигнала, например, сигнала СВОС. Для этой иллюстрации предполагаются модулирующие обработанные сигналы, игнорирующие местные несущие. Ресивер 44 содержит ряд 46 корреляторов, три показаны на примере. Здесь может быть также два или даже один из этих корреляторов 46.1, 46.2, 46.3 на канал, но также может быть и больше для того, чтобы уменьшить время поиска и/или, например, огибающую ошибки. Каждый коррелятор содержит смеситель (преобразователь частоты) 48.1, 48.2 и 48.3, соответственно, который смешивает входящий СВОС сигнал с копией местного двоичного колебательного сигнала SLOS, и интегратор 50.1, 50.2, 50.3, соответственно, который интегрирует смешанные сигналы и формирует выходной сигнал. Следует отметить, что для получения нескольких, переданных спутниками сигналов ресиверу необходимо иметь множество каналов приема. Для каждого канала приема ресивера существует такой набор корреляторов, выходные сигналы которых объединяются для формирования, в режиме обнаружения, сигнала оценки энергии полученного сигнала, и, в режиме прослеживания сигнала, дискриминатор псевдослучайного кода.
Первый, «ранний» коррелятор 46.1 предоставляет значение корреляции входного сигнала CBOC(t-τ) и «ранней» копии местного двоичного сигнала  . Следует помнить, что τ - это фаза псевдослучайного кода полученного сигнала и
. Следует помнить, что τ - это фаза псевдослучайного кода полученного сигнала и  - оценка этой τ. Δ - это длительность чипа, а n определяет долю длительности чипа, посредством которой копия местного двоичного колебательного сигнала является ранней относительно оценки
- оценка этой τ. Δ - это длительность чипа, а n определяет долю длительности чипа, посредством которой копия местного двоичного колебательного сигнала является ранней относительно оценки  . Второй, «синфазный» коррелятор 46.2 предоставляет значение корреляции входного сигнала CBOC(t-τ) и «синфазную» копию местного двоичного колебательного сигнала
. Второй, «синфазный» коррелятор 46.2 предоставляет значение корреляции входного сигнала CBOC(t-τ) и «синфазную» копию местного двоичного колебательного сигнала  . Третий, «поздний» коррелятор 46.3 предоставляет значение корреляции входного сигнала CBOC(t-τ) и «позднюю» копию местного двоичного колебательного сигнала
. Третий, «поздний» коррелятор 46.3 предоставляет значение корреляции входного сигнала CBOC(t-τ) и «позднюю» копию местного двоичного колебательного сигнала  .
.
Для формирования сигналов  ,
,  и
и  ресивер 44 содержит ряд генераторов. В целях наглядности показан только генератор 52, который обеспечивает копию
ресивер 44 содержит ряд генераторов. В целях наглядности показан только генератор 52, который обеспечивает копию  местного колебательного сигнала. Генератор 52 управляется блоком 54 управления. Генератор 52 может содержать, например, осциллятор с числовым программным управлением (NCO). В этом случае, в качестве входного сигнала NCO получает заданное значение частоты колебаний, соответствующее скорости передачи элементов сигнала с коррекцией допплеровского сдвига частоты с двоичным значением, которое определяет, выводит ли NCO сигнал ВОС (n2, m) или сигнал ВОС (n1, m). Двоичное значение предоставляется блоком управления в зависимости от рабочего режима ресивера, т.е. в зависимости от того, находится ли ресивер в режиме сбора данных, режиме отслеживания или он получает сигнал СВОС или сигнал ТМВОС. Блок управления, в частности, определяет временный порядок сегмента(ов) ВОС (n1, m) и сегмента(ов) ВОС (n2, m) вместе с длительностью сегмента(ов) ВОС (n1, m) и сегмента(ов) ВОС (n2, m).
местного колебательного сигнала. Генератор 52 управляется блоком 54 управления. Генератор 52 может содержать, например, осциллятор с числовым программным управлением (NCO). В этом случае, в качестве входного сигнала NCO получает заданное значение частоты колебаний, соответствующее скорости передачи элементов сигнала с коррекцией допплеровского сдвига частоты с двоичным значением, которое определяет, выводит ли NCO сигнал ВОС (n2, m) или сигнал ВОС (n1, m). Двоичное значение предоставляется блоком управления в зависимости от рабочего режима ресивера, т.е. в зависимости от того, находится ли ресивер в режиме сбора данных, режиме отслеживания или он получает сигнал СВОС или сигнал ТМВОС. Блок управления, в частности, определяет временный порядок сегмента(ов) ВОС (n1, m) и сегмента(ов) ВОС (n2, m) вместе с длительностью сегмента(ов) ВОС (n1, m) и сегмента(ов) ВОС (n2, m).
Изобретение относится к способу получения и ресиверу для радионавигационного сигнала, модулированного СВОС распространяющимся колебательным сигналом. Для получения радионавигационного сигнала, модулированного комбинированным колебательным сигналом, комбинированный колебательный сигнал содержит линейную комбинацию с действительнозначными коэффициентами компонента ВОС (n1, m) и компонента ВОС (n2, m), причем n1 отличается от n2, и корреляция осуществляется между местным колебательным сигналом и комбинированным колебательным сигналом в течение временного интервала длительности Т. Местный колебательный сигнал является двоичным колебательным сигналом, сформированным в течение указанного временного интервала с помощью, по меньшей мере, одного сегмента колебательного сигнала ВОС (n1, m) и, по меньшей мере, одного сегмента колебательного сигнала ВОС (n2, m), при этом, по меньшей мере, один сегмент ВОС (n1, m) имеет общую длительность αТ, причем значение α находится строго между 0 и 1, и, по меньшей мере, один сегмент сигнала ВОС (n2, m) имеет общую длительность (1-α)Т. Технический результат - получение радионавигационного сигнала, модулированного комбинированным распространяющимся сигналом. 2 н. и 7 з.п. ф-лы, 9 ил.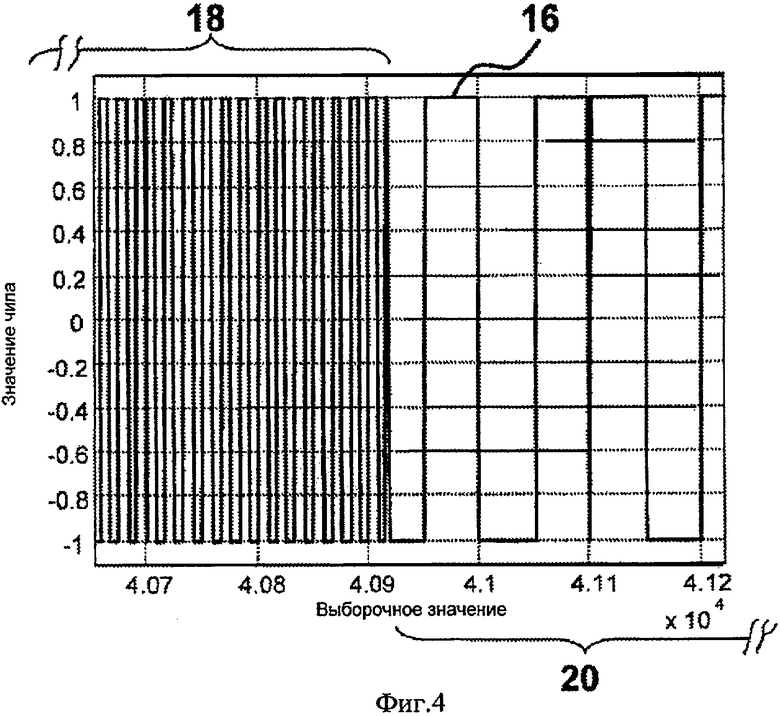
1. Способ получения радионавигационного сигнала, модулированного комбинированным колебательным сигналом, при этом комбинированный колебательный сигнал содержит линейную комбинацию с действительнозначными коэффициентами компонента ВОС (n1, m) и компонента ВОС (n2, m), причем n1 отличается от n2, при этом корреляция осуществляется между местным колебательным сигналом и комбинированным колебательным сигналом в течение временного интервала длительности Т, отличающийся тем, что местный колебательный сигнал является двоичным колебательным сигналом, сформированным в течение указанного временного интервала с помощью, по меньшей мере, одного сегмента колебательного сигнала ВОС (n1, m) и, по меньшей мере, одного сегмента колебательного сигнала ВОС (n2, m), следующих друг за другом, при этом, по меньшей мере, один сегмент ВОС (n1, m) имеет общую длительность αТ, причем значение α находится строго между 0 и 1, и, по меньшей мере, один сегмент сигнала ВОС (n2, m) имеет общую длительность (1-α)Т.
2. Способ по п.1, в котором компоненты ВОС (n1, m) и ВОС (n2, m) несут идентичный псевдослучайный код, и в котором местный колебательный сигнал несет, по меньшей мере, одну заранее установленную часть этого псевдослучайного кода.
3. Способ по п.1, в котором n2=1 и m=1, поэтому линейная комбинация, будучи колебательным сигналом СВОС (n1, 1), может быть представлена как
CBOC(n1,1)=V·BOC(1,1)+W·BOC(n1,1),
где V и W - это действительнозначные весовые коэффициенты.
4. Способ по п.1, в котором n1=6.
5. Способ по п.3, в котором α, по меньшей мере, примерно равна W/(V+W).
6. Способ по одному из пп.1-5, в котором используется множество сегментов колебательного сигнала ВОС (n1, m) общей длительности αТ и/или множество сегментов колебательного сигнала ВОС (n2, m) общей длительности (1-α)Т.
7. Ресивер, выполненный с возможностью получения радионавигационного сигнала, модулированного комбинированным колебательным сигналом, при этом комбинированный колебательный сигнал содержит линейную комбинацию с действительнозначными коэффициентами компонента ВОС (n1, m) и компонента ВОС (n2, m), причем n1 отличается от n2,
при этом ресивер содержит ряд генераторов местного комбинированного колебательного сигнала и корреляторов для осуществления корреляции между местным колебательным сигналом и комбинированным колебательным сигналом в течение временного интервала длительности Т,
отличающийся тем, что
генераторы местного колебательного сигнала выполнены для генерации в качестве местного колебательного сигнала местного двоичного колебательного сигнала, сформированного в течение интервала последовательности следующих друг за другом, по меньшей мере одного сегмента ВОС (n1, m) колебательного сигнала и, по меньшей мере, одного сегмента ВОС (n2, m) колебательно сигнала, при этом, по меньшей мере, один сегмент ВОС (n1, m) колебательного сигнала имеет общую длительность αТ, причем значение α находится строго между 0 и 1, и, по меньшей мере, один сегмент ВОС (n2, m) имеет общую длительность (1-α)Т.
8. Ресивер по п.7, содержащий блок управления, воздействующий на генераторы местного колебательного сигнала с тем, чтобы оказывать влияние на временный порядок сегмента(ов) ВОС (n1, m) и сегмента(ов) ВОС (n2, m) и/или длительность сегмента(ов) ВОС (n1, m) и сегмента(ов) ВОС (n2, m).
9. Ресивер по п.7, в котором n1=6, n2=1 и m=1.
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |
| US 20055281325 A1, 22.12.2005 | |||
| ИНТЕГРИРОВАННЫЙ ПРИЕМНИК СИГНАЛОВ СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 1999 |
|
RU2146378C1 |
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |
| EP 1110098 B1, 24.07.2002 | |||
| US 6044071 A, 28.03.2000. | |||

