Изобретение относится к способу приема и приемнику для радионавигационного сигнала, модулированного СВОС ("Composite Binary Offset Carrier") или TMBOC ("Time-Multiplexes Binary Offset Carrier") распространяющимся сигналом.
Уровень техники изобретения
Системы спутникового позиционирования, такие как GPS (Система глобального позиционирования), Galileo, ГЛОНАСС, QZSS, Compass, IRNSS и другие используют модулированные навигационные сигналы с расширенным спектром. Эти сигналы по существу несут псевдослучайные коды, состоящие из периодически повторяющихся числовых последовательностей, основной функцией которых является разрешение множественного доступа с кодовым распределением (Code Distribution Multiple Access - CDMA) и обеспечение точного измерения времени прохождения для переданного спутником сигнала. Попутно спутниковые сигналы позиционирования могут также нести полезные данные.
Что касается GPS, навигационные сигналы передаются на полосе частот L1 с центром на 1575,42 МГц и на полосе частот L2 с центром 1227,6 МГц. Полоса L5 с центром 1176,45 МГц будет добавлена во время модернизации GPS. Спутники группировки Galileo будут передавать в диапазонах: E2-L1-E1 (участок среднего диапазона L1 аналогичен участку для GPS), E5a (который согласно номенклатуре Galileo является диапазоном L5, предназначенным для GPS), E5b (с центром на частоте 1207,14 МГц) и Е6 (с центром на частоте 1278,75 МГц).
Навигационные сигналы формируются путем модулирования центральных (несущих) частот. Для создания навигационных сигналов уже были установлены или, по меньшей мере, рассматриваются различные схемы модуляции. Чтобы гарантировать возможность взаимодействия и совместимость между системами GPS и Galileo, Соединенные Штаты Америки и Европейский Союз выработали соглашение по определенным пунктам, касающимся схем модуляции сигнала в диапазоне L1, который используется обеими системами. Более подробные сведения о предлагаемых схемах модуляции можно получить из публикации „МВОС: Новая оптимизированная модуляция распространения, рекомендованная для GALILEO L1 OS и GPS L1C", Хайн и др. / "МВОС: The new optimized spreading modulation recommended for GALILEO L1 OS и GPS L1C Hein et al., InsideGNSS, май/июнь 2006, стр.57-65.
Одна из схем модуляции, выбранная в качестве кандидата для модулирования сигнала Galileo OS L1, известна под названием «ТМВОС модуляция». Более того, этот тип модуляции уже был выбран для сигнала L1C GPS. ТМВОС распространяющийся сигнал, модулирующий несущую, может быть описан как чередующаяся последовательность сегментов первого сигнала BOC (n1, m) и сегментов второго сигнала ВОС (n2, m), где n1>n2. „BOC" обозначает модуляцию двойного смещения несущей, являющейся аббревиатурой для „Binary Offset Carrier". В целом ВОС (n, m) является функцией времени t, определяемой по формуле:

где Cm(t) - псевдослучайный код скорости передачи элементов сигнала×1023 Mcps при условии, что значениями +1 или -1 и fsc является частота n×1.023 МГц. Одним условием, применимым к n и m, является то, что соотношение 2n/m является целым числом. TMBOCm(n1, n2) распространяющийся сигнал определяется формулой:

где fn1=n1×1.023 МГц, fn2=n2×1.023 МГц, где S1 - объединение „BOC (n1, m)" сегментов и S2 является объединением „BOC (n2, m)" сегментов, S1 и S2 являются дополняющими друг друга на оси времени, и где Cm(t) является псевдослучайным кодом сигнала при скорости передачи элементов сигнала m×1.023 Mcps и предполагая значения +1 или -1. Для сигналов GPS L1C и Galileo OS L1, m=1, n2=1 и n1=6 будут иметь место в качестве применимых. Соотношение между длиной сегментов „BOC (1,1)" и длиной сегментов „BOC (6,1)" определяет то, как мощность сигнала распределяется между двумя компонентами.
Другая возможная схема модуляции для модуляции сигнала Galileo OS L1 известна под названием „CBOC модуляция". CBOC распространяющийся сигнал, модулирующий несущую, является линейной комбинацией первого сигнала BOC (n2, m) и второго сигнала ВОС (n1, m). В этом случае сигналы CBOCm(n1, n2) могут быть записаны в следующем виде:

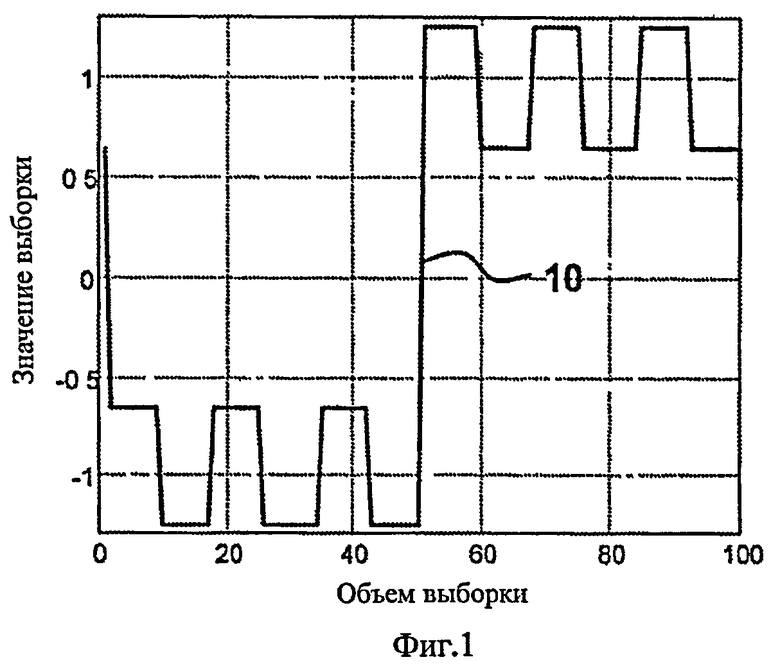
где V и W - действительные коэффициенты, определяющие относительный вес компонентов BOC (n2, m) и BOC (n1,.m). В случае с сигналом CBOC два компонента BOC несут идентичный псевдослучайный код. Если эта модуляции выбрана для Galileo OS L1, то будут применяться m=1, n11=6 и n2=1. Модуляция CBOC (6,1) сигнала 10 показана на фиг.1.
Чтобы определить время прохождения сигнала, переданного спутником (псевдорасстояние) на приемник, способ получения сигнала содержит стадию корреляции. В технической области хорошо известно коррелирование сигнала, модулирующего радионавигационный сигнал местными опорными сигналами этого модулирующего сигнала. Модулирующий сигнал имеет при первом обнаружении неизвестную фазу, которая должна быть определена для вычисления позиции приемника. Способ обычно осуществляется многократно и начинается с начальной оценки неизвестной фазы модулирующего сигнала. Затем в приемнике вырабатывается текущий опорный сигнал модулирующего сигнала, то есть копия модулирующего сигнала, фаза которого соответствует оценке, которая затем коррелируется с помощью модулирующего сигнала. Параллельно вырабатываются одно или более смещений местного опорного сигнала модулирующего сигнала, то есть одна или более копий модулирующего сигнала, фаза которого рано или поздно относительна оценке. Этот или эти смещения опорного сигнала также коррелируются модулирующим сигналом. Результаты этих корреляций затем используются для улучшения оценки фазы модулирующего сигнала. Способ затем повторяется до тех пор, пока фаза не будет определена с достаточной точностью.
Европейская патентная заявка EP 1681773 описывает этот способ приема в случае модулирующего сигнала типа CBOC. Входящий сигнал, моделированный сигналом CBOC, и местный опорный сигнал этого сигнала CBOC являются, таким образом, коррелированными. Данное решение включает в себя генерирование опорного сигнала CBOC в приемнике. Поэтому необходимо осуществлять четырехуровневое квантование на входе коррелятора, который требует, по меньшей мере, 2-битовой архитектуры. В той же патентной заявке упоминается второй способ, в котором корреляция осуществляется между входящим сигналом и местным опорным сигналом первого компонента BOC, а другая корреляция осуществляется между входящим сигналом и местным опорным сигналом второго компонента BOC. Результаты двух корреляций затем объединяются. В этом втором способе местные опорные сигналы являются однобитовыми, что может рассматриваться в качестве преимущества относительно первого решения. Цена, которую необходимо заплатить, заключается в удвоении количества операций корреляции по сравнению с первым решением, все остальное является тем же самым.
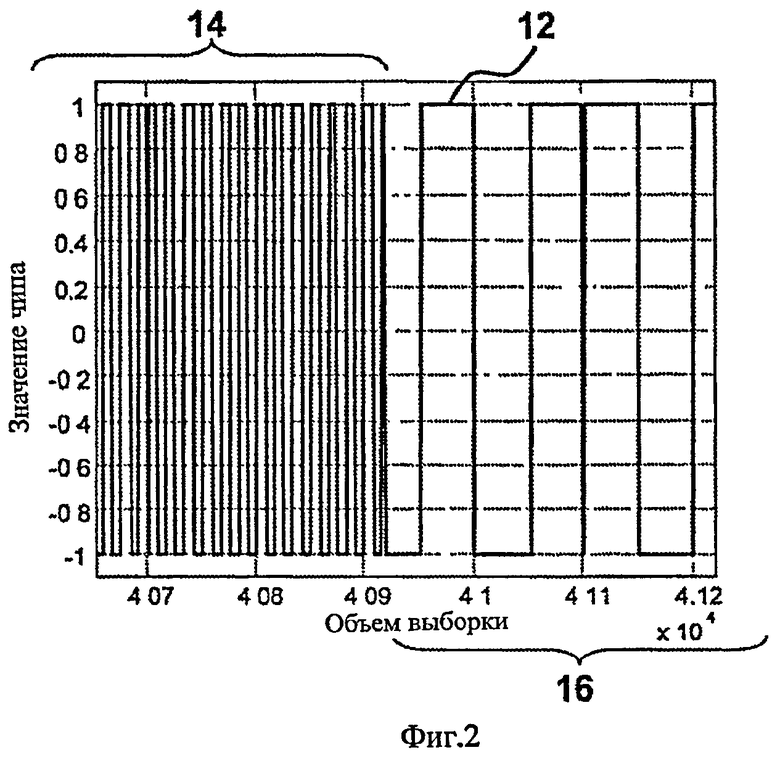
Французская патентная заявка 06 05551 представляет улучшенный способ и улучшенный приемник для приема сигнала CBOC, имеющего компонент BOC (n1, m) и компонент BOC (n2, m), где n2<n1. Для осуществления корреляции между местным сигналом и сигналом CBOC, переданным спутником в течение временного интервала с длительностью Т, это приложение предлагает генерацию местного сигнала в виде двоичного сигнала (позиция 12 на фиг.2), сформированного в течение указанного интервала времени чередующейся последовательности, содержащей по меньшей мере один сегмент сигнала BOC (n1, m) 14 и по меньшей мере один сегмент сигнала BOC (n2, m) 16, причем по меньшей мере один сегмент ВОС (n1, m) 14 имеет общую длительность (1-α)Т, при этом α является строго между 0 и 1, и по меньшей мере один сегмент BOC (n2, m) 16 имеет общую длительность (1-α)Т. В частности, способ не включает в себя сигнал с более чем двумя уровнями и не требует большего числа корреляторов.
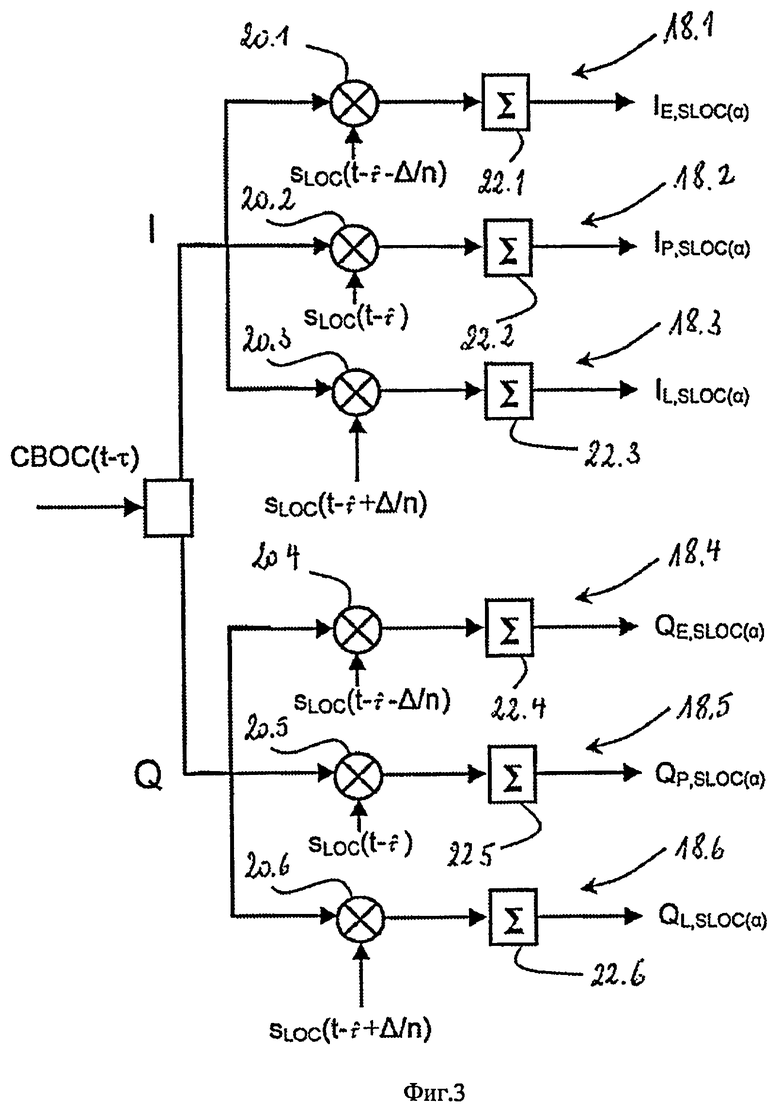
На фиг.3 показана упрощенная диаграмма канала приема приемника, выполненного с возможностью осуществления описанного в FR 06 05551 способа. Следует отметить, что тот же самый местный двоичный сигнал SLOC используется для осуществления различных корреляций.
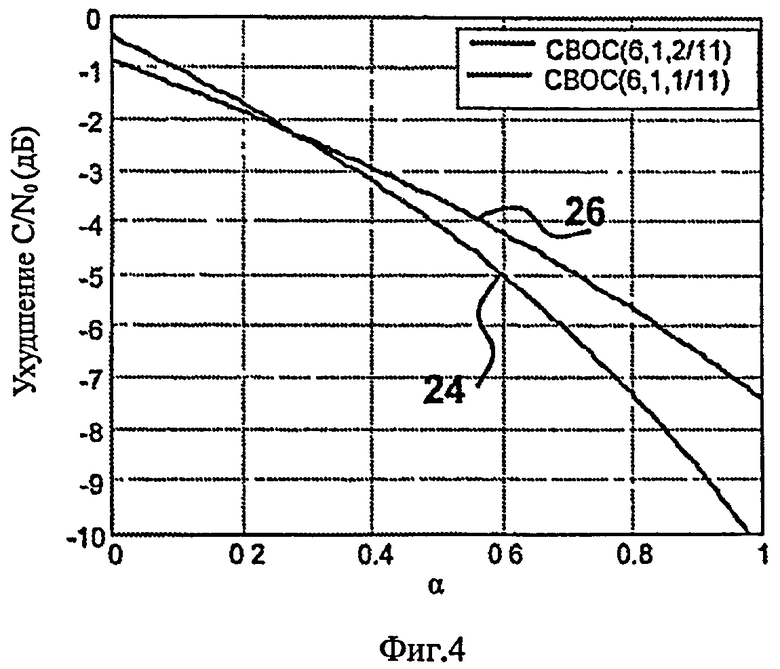
При осуществлении описанного в FR 06 05551 способа наблюдается, в частности если m=1, n1=6 и n2=1, что если α увеличивается, то есть если в местном сигнале SLOC пропорция компонента BOC (6,1) увеличивается в ущерб пропорции компонента BOC (1,1), то ухудшение соотношения C/N0 (соотношение мощности С несущей к спектральной плотности шума N0) становится более значительным, делая таким образом прием сигнала более трудным. Ухудшение соотношения C/N0 в качестве функции значения параметра α показано на фиг.4 для двух типов CBOC модулирующего сигнала (один с одной одиннадцатой общей мощности в компоненте BOC (6,1), другой с двумя одиннадцатыми, это распределение мощности упоминается со ссылкой на пример). С другой стороны, если α увеличивается, наблюдается также увеличение в рабочей характеристике синхронизации («осуществление слежения») и лучшее сопротивление эффекту многолучевого распространения.
Цель изобретения
Целью изобретения является разработка новаторского способа получения радионавигационного сигнала, модулированного распространяющимся сигналом.
Общее описание изобретения
Чтобы получить радионавигационный сигнал, модулированный модулирующим сигналом, модулирующий сигнал содержит компонент BOC (n1, m) и компонент BOC (n2, m), n2 является строго меньше чем n1, корреляция осуществляется в течение временного интервала длительностью Т между текущим сигналом в точке приема и модулирующим сигналом и между смещенным сигналом в точке приема (ранний или поздний) и модулирующим сигналом. Согласно изобретению текущий сигнал в точке приема генерируется в виде двоичного сигнала, содержащего в течение указанного временного интервала по меньшей мере один сегмент сигнала BOC (n2, m) общей длительностью (1-α)Т в течение указанного временного интервала, при этом α является параметром, большим или равным 0, и строго меньше 1. Согласно изобретению смещенный сигнал в точке приема генерируется в виде двоичного сигнала, содержащего в течение указанного временного интервала по меньшей мере один сегмент сигнала BOC (n1, m) общей длительностью αвТ в течение указанного временного интервала, при этом αв является параметром строго большим 0 и меньшим или равным 1, и αA отличается от αв. За исключением тех случаев, в которых αA=0, текущий смещенный сигнал в точке приема содержит в течение указанного временного интервала по меньшей мере один сегмент сигнала BOC (ni, m), при этом общая длительность этого по меньшей мере одного сегмента равна αТ. За исключением тех случаев, в которых αв=1, смещенный сигнал в точке приема содержит в течение указанного временного интервала по меньшей мере один сегмент сигнала BOC (n2, m), при этом общая длительность этого по меньшей мере одного сегмента равна (1-αв)Т. Так как αA и αв являются различными, текущий и смещенный сигнал в точке приема отличаются пропорциями сегментов BOC (n1, m) и BOC (n2, m). Поэтому, благодаря изобретению можно регулировать раздельно текущий и смещенный сигнал в точке приема для достижения улучшенного приема радионавигационного сигнала. Это делает возможным, до определенной степени, отделить улучшение в осуществлении синхронизации от ухудшения соотношения C/N0, сохраняя преимущество местных двоичных сигналов.
В частном случае, в котором αA=0, текущий сигнал в точке приема является местным опорным сигналом компонента BOC (n2, m) комбинированного сигнала в течение указанного интервала корреляции. Значение αв может в принципе быть свободно выбрано внутри вышеуказанного диапазона, однако, предпочтительно, из верхней части этого диапазона, то есть от 0,8 до 1.
В частном случае, в котором αв=1, смещенный сигнал в точке приема является местным опорным сигналом компонента BOC (n1, m) комбинированного сигнала в течение указанного интервала времени. Значение αA может в принципе быть свободно выбрано внутри вышеуказанного диапазона, однако, предпочтительно, из нижней части этого диапазона, то есть от 0 до 0,2.
Предпочтительно, значение параметра αА является значительно меньшим, чем значение параметра αв. Случай, когда выполняются два условия αA=0 и αв=1, рассматривается как особо предпочтительный.
Смещенный сигнал в точке приема может содержать ранний местный сигнал, и/или поздний сигнал, и/или разницу между ранним местным сигналом и поздним местным сигналом. Согласно предпочтительному варианту осуществления изобретения корреляция осуществляется на текущем канале приемника (между входящим модулирующим сигналом и текущим местным двоичным сигналом), на «позднем» канале приемника (между входящим модулирующим сигналом и поздним местным двоичным сигналом), и на «раннем» канале приемника (между входящим модулирующим сигналом и ранним местным двоичным сигналом). Согласно другому предпочтительному варианту осуществления изобретения корреляция осуществляется на первом канале между входящим модулирующим сигналом и текущим местным двоичным сигналом, и на втором канале между входящим модулирующим сигналом и разницей раннего местного двоичного сигнала и позднего местного двоичного сигнала.
Следует отметить, что способ по изобретению является особо предпочтительным для приема радионавигационного сигнала, модулированного модулирующим сигналом типа CBOC, при этом последний содержит линейную комбинацию с действительными параметрами компонента BOC (n1, m) и компонента BOC (n2, m). Тем не менее, способ может также быть использован для приема навигационного сигнала, модулированного модулирующим сигналом типа ТМВОС, при этом последний содержит чередующуюся последовательность сегментов компонента ВОС (n1, m) и сегментов компонента BOC (n2, m). Поэтому приемник, выполненный с возможностью осуществления способа, мог бы одинаково хорошо принимать как сигналы, модулированные согласно схеме CBOC, так и сигналы, модулированные согласно схеме ТМВОС, что гарантировало бы совместимость GPS L1 C/Galileo OS L1, даже если схема модуляции CBOC была выбрана для Galileo OS L1.
Приемник для осуществления способа содержит, предпочтительно, генераторы местного сигнала для генерации текущего сигнала в точке приема и смещенного сигнала в точке приема вместе с корреляторами для осуществления в течение временного интервала длительностью Т корреляции между текущим сигналом в точке приема и модулирующим сигналом. Эти генераторы местного сигнала выполнены для генерации указанного текущего сигнала в точке приема в виде двоичного сигнала, содержащего в течение указанного временного интервала по меньшей мере один сегмент сигнала ВОС (n2, m) общей длительностью (1-α)Т в течение указанного временного интервала, при этом αА является параметром, большим или равным 0, и строго меньше 1, и для генерации указанного смещенного сигнала в точке приема в виде двоичного сигнала, содержащего в течение временного интервала по меньшей мере один сегмент сигнала BOC (n1, m) общей длительностью αвТ в течение указанного временного интервала, при этом αв является параметром, отличающимся от параметра αA и строго больше 0 и меньше или равно 1.
Предпочтительно приемник содержит генератор текущего сигнала в точке приема, генератор смещенного сигнала в точке приема, первый коррелятор, оснащенный смесителем для смешивания модулирующего сигнала с текущим сигналом в точке приема, исходящим из генератора текущего сигнала в точке приема, и второй коррелятор, оснащенный смесителем для смешивания модулирующего сигнала со смещенным сигналом в точке приема, исходящим из генератора смещенного сигнала в точке приема.
Краткое описание чертежей
Другие подробности и характеристики изобретения станут понятными из подробного описания предпочтительных вариантов изобретения, приведенных ниже с помощью описания со ссылкой на прилагаемые чертежи, на которых показаны:
Фиг.1 временное изображение сигнала CBOC (6,1);
Фиг.2 временное изображение местного двоичного сигнала, сформированного последовательностью сегментов BOC (6,1) и BOC (1,1);
Фиг.3 схематическая диаграмма приемника, использующего один и тот же местный двоичный сигнал в текущих корреляторах и корреляторах смещения;
Фиг.4 представление ухудшения соотношения C/N0 в виде функции параметра α для приемника на фиг.3;
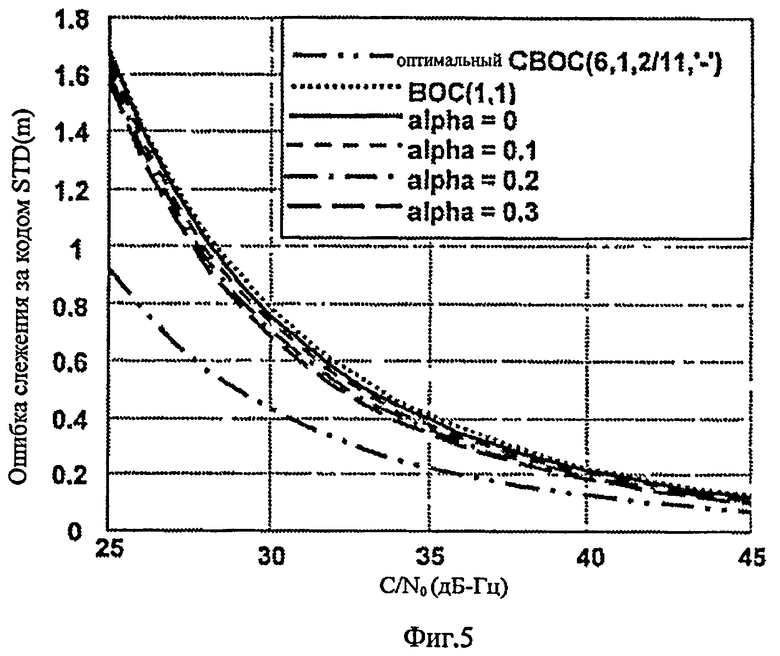
Фиг.5 представление ошибки слежения за кодом в виде функции соотношения C/N0 для приемника на фиг.3;
Фиг.6 схематическая диаграмма приемника, выполненного с возможностью осуществления нового способа;
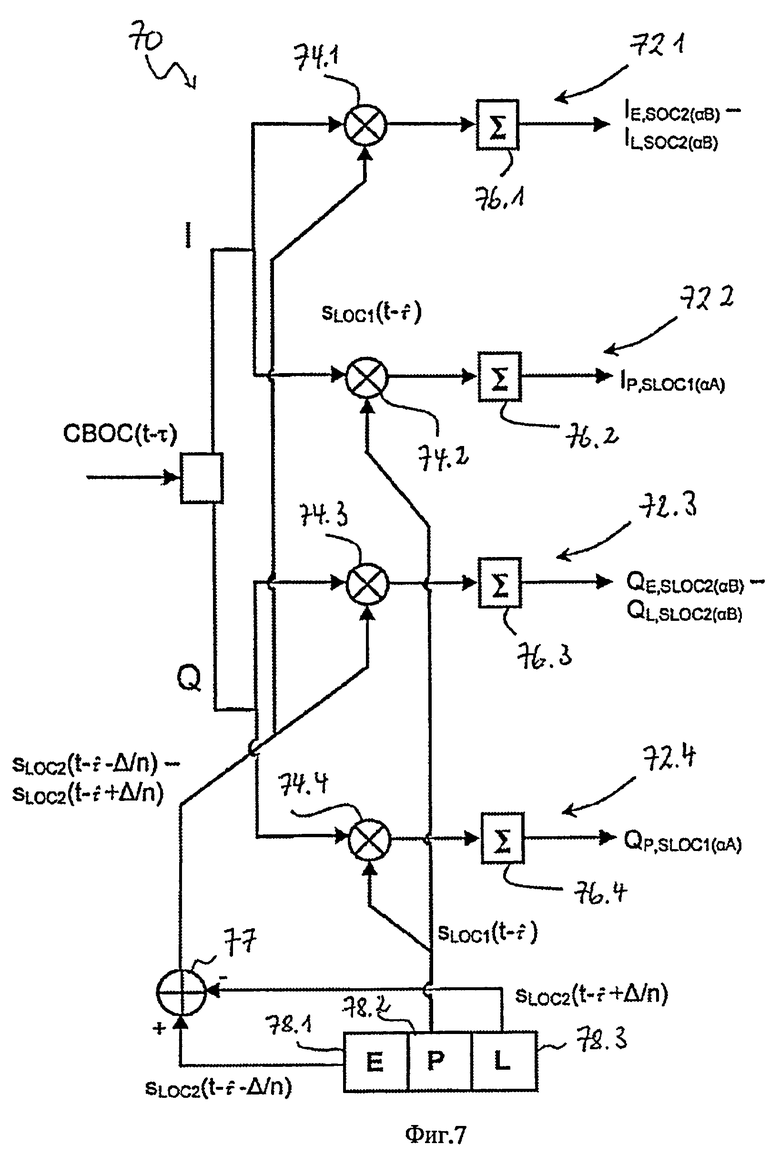
Фиг.7 схематическая диаграмма другого приемника, выполненного с возможностью осуществления нового способа;
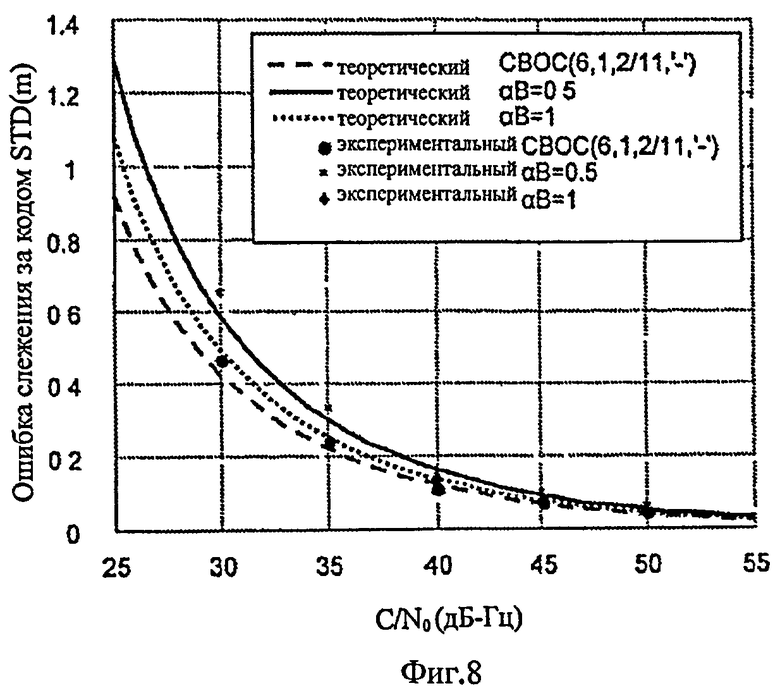
Фиг.8 представление ошибки слежения за кодом в виде функции соотношения C/N0 для нового способа с условием αA=0 и для разных значений αв, и для одного сравнительного случая;
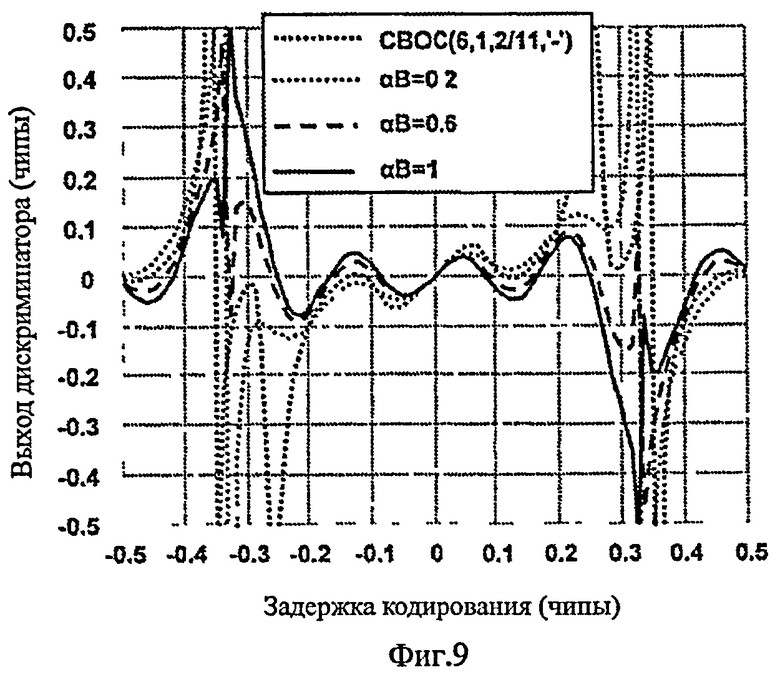
Фиг.9 изображение выхода дискриминатора в виде функции разновременности между кодом входящего сигнала и местным кодом для нового способа, с условием αA=0 и для разных значений αв, и для одного сравнительного случая.
Подробное описание
На фиг.1 показан сигнал 10 CBOC (6,1), определенный по формуле:

где V и W являются весовыми коэффициентами. Здесь и ниже скорость передачи элементов сигнала псевдослучайного кода установлена на 1, таким образом, позволяя пропустить индекс «m» в условных обозначениях, представленных уравнениями (1)-(3).
Различные значения V и W рассматриваются для сигнала Galileo OS L1 в зависимости от схемы мультиплексирования этого сигнала. Используются, например, условные обозначения CBOC (6,1,1/11), CBOC (6,1,2/11). Индексы «1/11» и «2/11» обозначают схему мультиплексирования для радионавигационного сигнала и ссылаются на определенный вес компонентов BOC (1,1) и ВОС (6,1). Для СВОС (6,1, 1/11) V=0,383998 и W=0,121431, для CBOC (6,1, 2/11) V=0,358235 и W=0,168874. Знак «+» или «-» иногда используется для обозначения того, предшествует ли «+» или «-» коэффициенту W в уравнении (4): например, СВОС (6,1, 1/11,-) или СВОС (6,1, 1/11,+).
Для обеспечения лучшего представления преимуществ данного изобретения сначала следует обсудить ухудшение соотношения C/N0, рабочие характеристики синхронизации и многолучевое сопротивление в случае способа приема радионавигационного сигнала, который использует один и тот же местный двоичный сигнал 12 на канале текущей корреляции и канале корреляции смещения, при этом указанный сигнал формируется в течение интервала корреляции (или длительности Т) посредством чередующейся последовательности, содержащей по меньшей мере один сегмент сигнала BOC (6,1) 14 и по меньшей мере один сегмент сигнала BOC (1,1) 16, при этом по меньшей мере один сегмент BOC (6,1) 14 имеет общую длительность αТ, причем α находится строго между 0 и 1, α по меньшей мере один сегмент BOC (1,1) 16 имеет общую длительность (1-α)Т. β=1-α и SLOC(α) будет обозначен как местный двоичный сигнал.
Показанный на фиг.3 приемник содержит корреляторы 18.1-18.6, каждый из которых имеет смеситель 20.1-20.6, который смешивает входящий сигнал типа СВОС с копией местного двоичного сигнала SLOC, показанного на фиг.2 типа, и интегратор 22.1-22.6, который интегрирует смешанные сигналы и вырабатывает выходной сигнал. Первый «ранний» коррелятор 18.1 предоставляет значение корреляции IE.SLOC(α) синфазной части входящего сигнала CBOC (t-τ) и «раннюю» копию  местного двоичного сигнала SLOC (τ является фазой псевдослучайного кода полученного сигнала, а
местного двоичного сигнала SLOC (τ является фазой псевдослучайного кода полученного сигнала, а  - это оценка τ, Δ является длительностью чипа и n определяет долю длительности чипа, посредством которой копия местного двоичного сигнала является ранней относительно оценки
- это оценка τ, Δ является длительностью чипа и n определяет долю длительности чипа, посредством которой копия местного двоичного сигнала является ранней относительно оценки  .) Второй коррелятор 18.2 является «текущим» коррелятором, который поставляет значение IP,SLOC(α) корреляции синфазной части входящего сигнала CBOC (t-τ) и текущую копию
.) Второй коррелятор 18.2 является «текущим» коррелятором, который поставляет значение IP,SLOC(α) корреляции синфазной части входящего сигнала CBOC (t-τ) и текущую копию  местного двоичного сигнала. Третий коррелятор 18.3 является «поздним» коррелятором, который поставляет значение ILSLOC(α) корреляции синфазной части входящего сигнала sLOC(t-
местного двоичного сигнала. Третий коррелятор 18.3 является «поздним» коррелятором, который поставляет значение ILSLOC(α) корреляции синфазной части входящего сигнала sLOC(t- ) и «позднюю» копию sLOC(α)(t-
) и «позднюю» копию sLOC(α)(t- +Δ/n) местного двоичного сигнала SLOC. Коррелятор 18.4 поставляет значение корреляции QE.SLOC(α) квадратурной части входящего сигнала CBOC (t-τ) и «раннюю» копию sLOC(t-
+Δ/n) местного двоичного сигнала SLOC. Коррелятор 18.4 поставляет значение корреляции QE.SLOC(α) квадратурной части входящего сигнала CBOC (t-τ) и «раннюю» копию sLOC(t- -αΔ/n) местного двоичного сигнала SLOC. Коррелятор 18.5 поставляет значение Q P,SLOC(α) корреляции квадратурной части входящего сигнала СВОС (t-) и текущую копию sLOC(t-) местного двоичного сигнала. Коррелятор 18.6 поставляет значение QL.SLOC(α) корреляции квадратурной части входящего сигнала CBOC (t-τ) и «поздней» копии sLOC(t-+Δ/n) местного двоичного сигнала SLOC.
-αΔ/n) местного двоичного сигнала SLOC. Коррелятор 18.5 поставляет значение Q P,SLOC(α) корреляции квадратурной части входящего сигнала СВОС (t-) и текущую копию sLOC(t-) местного двоичного сигнала. Коррелятор 18.6 поставляет значение QL.SLOC(α) корреляции квадратурной части входящего сигнала CBOC (t-τ) и «поздней» копии sLOC(t-+Δ/n) местного двоичного сигнала SLOC.
Таким образом, достигается следующий выход коррелятора:


где «X» обозначает канал корреляции при рассмотрении (X=L: поздний канал корреляции, X=P: текущий канал корреляции, X=E: ранний канал корреляции), RBOC(6,1) - функция автокорреляции сигнала BOC (1,1); RBOC(6,1) - функция автокорреляции сигнала BOC (6,1) и RBOC(1.1)/BOC(6.1) - функция корреляции между сигналом BOC (1,1) и сигналом BOC (6,1); εт - разница между фазой местного псевдослучайного кода , оценкой фазы τ псевдослучайного кода входящего сигнала и фазой τ; εφ - разница между фазой несущей местного сигнала и фазой φ; δx=-Δ/n для X=E, δx=0 для X=P и δx=+Δ/n для X=E, и r представляет собой коррелятор выходного шума.
Корреляция RCBOC/CLOC(α) сигнала СВОС определена в формуле (4) и корреляция местного двоичного сигнала SLOC(α) будет рассмотрена ниже:

Функция автокорреляции RSLOC(α) местного двоичного сигнала SLOC(α) может быть приближенно выражена как:

а функция автокорреляции RCBOC функции CBOC записана как:

Ухудшение соотношения C/N0 может быть сформулировано как:

что обозначает, что чем больше значение α, тем больше потеря сигнала корреляции относительно случая, в котором опорный сигнал CBOC используется в качестве местного сигнала. Ухудшение соотношения C/N0 показано на фиг.4 для приема сигналов CBOC (6,1, 1/11) (кривая 24) и сигналов CBOC (6,1, 2/11) (кривая 26). Следует отметить, что для получения ухудшения соотношения C/N0 меньше, чем 3 dBs, значение α должно быть выбрано в диапазоне от 0 до 0,4.
Выходные значения коррелятора используются в петле для минимизации значения εт. Например, возможно вычислить дискриминатор скалярного D произведения (дискриминатор скалярного произведения):

Результирующая теоретической ошибки слежения за кодом формулируется как:
где отфильтрованные функции автокорреляции даны по формуле:

а отфильтрованные функции интеркорреляции даны по формуле:

В вышеприведенных уравнениях (11)-(11") В представляет собой ширину полосы пропускания ВЧ-фильтра головки (фильтр здесь предполагается прямоугольным), BL - полоса контурного фильтра DLL, Т - время интеграции, используемое для корреляции, P - мощность используемого входящего сигнала; d - интервал между ранним местным сигналом и поздним местным сигналом, N0 - уровень спектральной плотности термического шума и Gx - преобразование Фурье-сигнала X.
Ошибка слежения за кодом представлена в виде функции соотношения C/N0 на фиг.5 для разных значений а, в случае отслеживания сигнала CBOC (6,1, 2/11, "-") расстояния в 0,1 чип между ранним местным двоичным сигналом и поздним местным двоичным сигналом, 12 МГц входного фильтра (одностороннего) и 4 мс интеграционного времени (для корреляции). Можно отметить, что ошибка уменьшается, если α, увеличивается. Исходя из осуществления синхронизации, было бы предпочтительным выбрать α, близким к 1. Фактически, из вышеприведенного видно, что для этих значений α ухудшение соотношения C/N0 является существенным.
Также следует отметить, что для α=0,2 огибающая при многолучевом распространении эквивалентна той, которая получена при использовании CBOC (6,1, 2/11, "-") опорного сигнала в качестве местного сигнала.
Согласно данному изобретению используются разные текущие и смещенные сигналы в точке приема. Это делает возможным оптимизировать смещенные сигналы в точке приема независимо от текущего сигнала в точке приема. На фиг.6 показана схема первого приемника 60, выполненного с возможностью осуществления способа. Приемник содержит корреляторы 62.1-62.6, каждый из которых имеет смеситель 64.1-64.6, который смешивает входящий сигнал типа CBOC с копией местного двоичного сигнала, и интегратор 66.1-66.6, который интегрирует смешанные сигналы и вырабатывает выходной сигнал.
Приемник имеет набор генераторов 68.1-68.3 местного двоичного сигнала. Генератор 68.1 генерирует раннюю копию sLOC/2(t- -Δ/n) местного двоичного сигнала sLOC2. Сигнал sLOC2 содержит в течение интервала корреляции сегмент сигнала BOC (6,1) общей длительностью αВТ и, если αB≠1, сегмент сигнала BOC (1,1) длительностью (1-αB)Т. Далее предположим, что αB расположен в полуоткрытом интервале]0,1], который позволяет адресовать специфический случай αB=1 в то же самое время, что и в других случаях. Если αB=1, сигнал sLOC2 является чистым сигналом BOC (6,1). Для значений αB строго меньше 1, sLOC2 также содержит сегмент BOC (1,1) и может, например, иметь внешний вид сигнала 12 фиг.2. Генератор 68.3 генерирует позднюю копию sLOC/2(t-+Δ/n) местного двоичного сигнала sLOC2. Генератор 68.2 генерирует текущую копию SLOC1(t-) местного двоичного сигнала sLOC1. Сигнал sLOC1 содержит в течение интервала корреляции сегмент сигнала BOC (1,1) общей длительностью (1-αA)Т и, если αA≠0, сегмент сигнала BOC (6,1) длительностью αAT. Далее предположим, что αA расположен в полуоткрытом интервале [0,1[. Если αA=0, сигнал SLOC1 является чистым сигналом BOC (1,1). Для значений αА, строго больших 0, SLOC2 также содержит сегмент BOC (6,1) и также может иметь внешний вид сигнала 12.
-Δ/n) местного двоичного сигнала sLOC2. Сигнал sLOC2 содержит в течение интервала корреляции сегмент сигнала BOC (6,1) общей длительностью αВТ и, если αB≠1, сегмент сигнала BOC (1,1) длительностью (1-αB)Т. Далее предположим, что αB расположен в полуоткрытом интервале]0,1], который позволяет адресовать специфический случай αB=1 в то же самое время, что и в других случаях. Если αB=1, сигнал sLOC2 является чистым сигналом BOC (6,1). Для значений αB строго меньше 1, sLOC2 также содержит сегмент BOC (1,1) и может, например, иметь внешний вид сигнала 12 фиг.2. Генератор 68.3 генерирует позднюю копию sLOC/2(t-+Δ/n) местного двоичного сигнала sLOC2. Генератор 68.2 генерирует текущую копию SLOC1(t-) местного двоичного сигнала sLOC1. Сигнал sLOC1 содержит в течение интервала корреляции сегмент сигнала BOC (1,1) общей длительностью (1-αA)Т и, если αA≠0, сегмент сигнала BOC (6,1) длительностью αAT. Далее предположим, что αA расположен в полуоткрытом интервале [0,1[. Если αA=0, сигнал SLOC1 является чистым сигналом BOC (1,1). Для значений αА, строго больших 0, SLOC2 также содержит сегмент BOC (6,1) и также может иметь внешний вид сигнала 12.
Коррелятор 62.1 поставляет значение корреляции IE.SLOC2(t-t) синфазной части входящего сигнала CBOC (t-τ) и «ранней» копии sLOC2(t--Δ/n) местного двоичного сигнала SLOC2. (Как было указано ранее, τ является фазой псевдослучайного кода полученного сигнала, а - оценка τ, Δ - длительность чипа и n - определяет долю длительности чипа, посредством которой копия местного двоичного сигнала является ранней относительно оценки ). Коррелятор 62.2 является «текущим» коррелятором, который поставляет значение IP,SLOC1(αA) корреляции синфазной части входящего сигнала СВОС (t-τ) и текущую копию sLOC(τ-) местного двоичного сигнала SLOC1. Коррелятор 62.3 является «поздним» коррелятором, который поставляет значение IL,SLOC2(αB) корреляции синфазной части входящего сигнала CBOC (t-τ) и «поздней» копии sLOC2(t-+Δ/n) местного двоичного сигнала SLOC2. Коррелятор 62.4 поставляет значение корреляции QE,SLOC2(αB) квадратурной части входящего сигнала CBOC (t-τ) и «раннюю» копию sLOC2(t--Δ/n) местного двоичного сигнала SLOC2. Коррелятор 62.5 поставляет значение QP,SLOC1(αA) квадратурной части входящего сигнала CBOC (t-τ) и текущую копию sLOC1(t-) местного двоичного сигнала SLOC1. Коррелятор 62.6 поставляет значение QL,SLOC(αB) корреляции квадратурной части входящего сигнала CBOC (t-τ) и «поздней» копии sLOC2(t-+Δ/n) местного двоичного сигнала SLOC2. Из соображений наглядности фиг.6 показывает только соединения, идущие, соответственно, от генераторов 68.1, 68.2 и 68.3 к смесителям 64.4, 64.5 и 64.6. Соединения к смесителям 64.1, 64.2 и 64.3 не показаны.
На фиг.7 показана схематическая диаграмма другого приемника 70, выполненного с возможностью осуществления способа. Приемник 70 содержит корреляторы 72.1-72.4, каждый из которых имеет смеситель 74.1-74.4, который смешивает входящий сигнал типа CBOC с копией местного двоичного сигнала, и интегратор 76.1-76.4, который интегрирует смешанные сигналы и вырабатывает выходной сигнал.
Приемник имеет набор генераторов 78.1-78.3 местного двоичного сигнала. Генератор 78.1 генерирует раннюю копию sLOC2(t--Δ/n) местного двоичного сигнала SLOC2. Генератор 78.3 генерирует позднюю копию sLOC2(t-+Δ/n) местного двоичного сигнала SLOC2. Генератор 78.2 генерирует текущую копию sLOC1(t-) местного двоичного сигнала sLOC1. Сигналы SLOC1 и SLOC2 были определены в описании фиг.6. Сумматор 77 вырабатывает разницу между ранней копией sLOC2(t--Δ/n) и поздней копией sLOC2(t-+Δ/n) местного двоичного сигнала SLOC2, которые он получает от генераторов 78.1 и 78.3. Разница вводится в смесители 74.1 и 74.3. Коррелятор 72.3 поставляет значение корреляции QE,SLOC2(αB)-QL,SLOC2(αB) квадратурной части входящего сигнала CBOC (t-τ) и разницы между ранними и поздними копиями местного двоичного сигнала SLOC2. Коррелятор 72.4 поставляет значение QP,SLOC1(αA) корреляции квадратурной части входящего сигнала CBOC (t-τ) и текущей копии sLOC1(t-
) местного двоичного сигнала SLOC1.
В обоих видах осуществления нового способа может вычисляться дискриминатор скалярного произведения, который формулируется следующим образом:


Для приема сигнала CBOC (6,1, 1/11) или CBOC (6,1, 2/11) самым важным недостатком подхода использования одного и того же местного двоичного сигнала на текущем канале и канале смещения была потеря корреляции. Благодаря данному изобретению текущий сигнал в точке приема может быть выбран с большей пропорцией сигнала BOC (1,1), без проводимого таким образом уменьшения пропорции сигнала BOC (6,1) в ранних или поздних местных сигналах, которые улучшают синхронизацию.
Ниже будет обсужден специфический случай αA=0, то есть случай, в котором текущий сигнал в точке приема является сигналом BOC (1,1). Первое следствие состоит в том, что потеря корреляции (ухудшение соотношения C/N0) в фазе отслеживания (для которой используются только текущие корреляторы) является минимальной (примерно 0,9 dBs для сигнала CBOC (6,1, 2/11) и примерно 0,5 dBs для сигнала CBOC (6,1, 1/11), как можно видеть на фиг.4).
Теоретическая ошибка слежения за кодом достигается с αA=0 и дискриминатором скалярного произведения:
Следует отметить, что квадратный член корреляции между местным двоичным сигналом и BOC (6,1) модулирующим сигналом, представленный в уравнении (11), здесь заменен квадратным членом  , который является большим. Следовательно, квадратичная ошибка слежения за кодом уменьшается, когда уменьшается αA.
, который является большим. Следовательно, квадратичная ошибка слежения за кодом уменьшается, когда уменьшается αA.
Показано, что для модулирующего сигнала CBOC (6,1, 2/11, '-') стандартное отклонение ошибки слежения за кодом уменьшается для всех соотношений C/N0, если увеличивается значение параметра αB (αA=0). Лучшее осуществление отслеживания получается в предельном случае αB=1 (чистый BOC (6,1) в виде раннего и позднего местного сигнала).
Теоретические прогнозы проверялись с помощью модели со следующими установками:
+ прием сигнала СВОС (6,1, 2/11, "-") длительностью 40 с;
+ время интеграции 4 мс;
+ система автоматической подстройки по задержке (DLL loop) с поддержкой несущей и имеющая ширину полосы пропускания 1 Гц;
+ система фазовой автоподстройки частоты (PLL loop), имеющая ширину полосы пропускания 10 Гц, дискриминатор, базирующийся только на квадратурной части;
+ ширина полосы пропускания входа 10 МГц (односторонний).
Результаты моделирований показаны на фиг.8 и в таблицах 1-3.
На фиг.9 показан дискриминатор скалярного произведения (посредством IP,SLOC(αA) 2+QP,SLOC(αA) 2=IP,BOC(1,1) 2+QP,BOC(1,1) 2) для приема сигнала СВОС(6,1, 2/11, ′-′) для различных значений αB. Путем сравнения также показана кривая, полученная с помощью местного сигнала CBOC (6,1, 2/11, ′-′). Для увеличенных значений αВ более четко выражены неправильные точки слежения. Таким образом, должен быть осуществлен однозначный способ отслеживания. Кривые на фиг.9 были получены с помощью следующих параметров: расстояние в 0,1 чип между ранним местным двоичным сигналом и поздним местным двоичным сигналом, входной фильтр 15 МГц (односторонний) и 4 мс время интеграции (для корреляции).
Что касается многолучевого распространения, является очевидным, что чем больше пропорция BOC (6,1) в местном двоичном сигнале, тем ближе получающаяся в результате огибающая ошибки при многолучевом распространении подходит к огибающей ошибки при многолучевом распространении местного сигнала BOC (6,1). Трудно увидеть, как рабочая характеристика, исходя из многолучевого распространения, подвержена влиянию для значений αв≥0,3. Тем не менее, предполагается, что рабочая характеристика остается приблизительно такой же. В этом случае в свете вышеприведенного анализа, вероятно, является предпочтительным использовать увеличенное значение αB, близкое к 1 или даже равное 1.
В подробном анализе рабочей характеристики нового способа предполагается, что αA=0. Очевидно, что похожая рабочая характеристика может быть получена для значений αA, близких, но отличных от 0. Также замечено, что оптимальный выбор αA и αB будет значительно зависеть от модулирующего сигнала радионавигационного сигнала. Это может быть сигнал CBOC, как указано в подробном описании, или альтернативно, повторим еще раз, сигнал типа TMBOC, как предполагалось для сигнала L1C GPS.
В анализе обсуждался только дискриминатор скалярного произведения. Однако следует отметить, что существуют другие дискриминаторы, которые также могут быть использованы для осуществления данного изобретения, в частности «ранний-минус-поздний» или «текущий» дискриминатор, например, для определения фазы входящего сигнала.
Также следует упомянуть, что для получения нескольких переданных спутниками сигналов приемнику необходимо иметь множество каналов приема. Для каждого канала приема приемника существует набор корреляторов, как описано в данном изобретении, выходные сигналы которых объединены для формирования в режиме обнаружения сигнала оценки энергии полученного сигнала, а в режиме отслеживания сигнала - дискриминатор псевдослучайного кода.
Изобретение относится к радионавигации, а именно к способам приема радионавигационного сигнала. Достигаемый технический результат - повышение точности синхронизации принимаемого сигнала с опорным сигналом. Для приема радионавигационного сигнала, модулированного модулирующим сигналом, содержащим компонент ВОС (n1, m) и компонент ВОС (n2, m), в течение интервала времени длительностью Т осуществляются корреляция между текущим сигналом в точке приема и модулирующим сигналом и корреляция между смещенным сигналом в точке приема и модулирующим сигналом. Текущий сигнал в точке приема генерируется в виде двоичного сигнала, содержащего в течение указанного временного интервала один сегмент сигнала ВОС (n2, m) общей длительностью (1-αA)Т. Смещенный сигнал в точке приема генерируется в виде двоичного сигнала, содержащего в течение указанного временного интервала один сегмент сигнала ВОС (n1, m) общей длительностью αВТ. 2 н. и 11 з.п. ф-лы, 9 ил., 3 табл.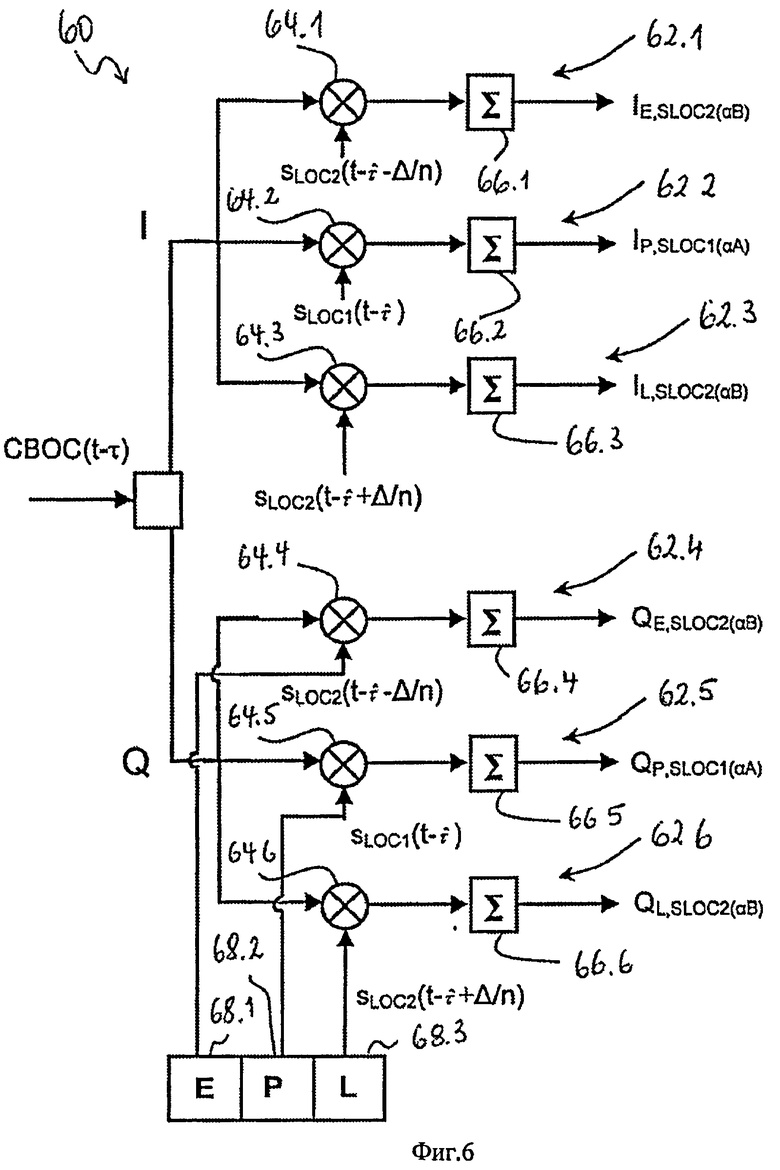
1. Способ приема радионавигационного сигнала, модулированного модулирующим сигналом, при этом модулирующий сигнал содержит компонент ВОС (n1, m) и компонент ВОС (n2, m), где n1 отличается от n2, а ВОС (n, m) каждый раз определяется функцией времени t по формуле:
ВОС(n, m)(t)=Cm(t)·sign[sin(2πfsct)],
где t - время, Cm(t) - псевдослучайный код скорости передачи элементов сигнала m·1023 Mcps, при условии, что значениями +1 или -1 и fsc является частота n·1,023 МГц, а n и m являются числами, выбранными так, что соотношение 2n/m является целым числом,
причем при осуществлении способа выполняется в течение интервала времени длительностью Т корреляция между текущим сигналом в точке приема и модулирующим сигналом, и корреляция между смещенным сигналом в точке приема и модулирующим сигналом,
отличающийся тем, что
текущий сигнал в точке приема генерируется в виде двоичного сигнала, содержащего в течение указанного временного интервала по меньшей мере один сегмент сигнала ВОС (n2, m) общей длительностью (1-αA)Т в течение указанного временного интервала, при этом αA является параметром большим или равным 0 и строго меньшим 1, и тем, что
смещенный сигнал в точке приема генерируется в виде двоичного сигнала, содержащего в течение указанного временного интервала по меньшей мере один сегмент сигнала ВОС (n1, m) общей длительностью αBT в течение указанного временного интервала, при этом αB является параметром строго большим 0 и меньшим или равным 1, а параметры αA и αB являются различными.
2. Способ по п.1, в котором αA равно 0.
3. Способ по п.1, в котором αB равно 1.
4. Способ по п.2, в котором αB равно 1.
5. Способ по п.1, в котором αA меньше, чем αB.
6. Способ по п.1, в котором текущий сигнал в точке приема содержит в течение указанного временного интервала по меньшей мере один сегмент сигнала ВОС (n1, m) общей длительностью αAT в течение указанного интервала времени, при этом αA расположен строго между 0 и 1.
7. Способ по п.1, в котором смещенный сигнал в точке приема содержит в течение указанного временного интервала по меньшей мере один сегмент сигнала ВОС (n2, m) общей длительностью (1-αB)Т в течение указанного временного интервала, при этом αB расположен строго между 0 и 1.
8. Способ по п.1, в котором смещенный сигнал в точке приема содержит ранний местный сигнал, или поздний местный сигнал, или разницу между ранним местным сигналом и поздним местным сигналом.
9. Способ по п.1, в котором n2=1, n1=1 и m=1.
10. Способ по одному из пп.1-9, в котором модулирующий сигнал, который модулирует радионавигационный сигнал, является модулирующим сигналом типа СВОС, при этом модулирующий сигнал типа СВОС содержит линейную комбинацию с действительными параметрами компонента ВОС (n1, m) и компонента ВОС (n2, m).
11. Способ по одному из пп.1-9, в котором модулирующий сигнал, который модулирует радионавигационный сигнал, является модулирующим сигналом типа ТМВОС, при этом модулирующий сигнал типа ТМВОС содержит чередующуюся последовательность сегментов компонента ВОС (n1, m) и сегментов компонента ВОС (n2, m).
12. Приемник для приема радионавигационного сигнала, модулированного модулирующим сигналом, при этом модулирующий сигнал содержит компонент ВОС (n1, m) и компонент ВОС (n2, m), где n1 отличается от n2, а ВОС (n, m) каждый раз определяется функцией времени t по формуле:
ВОС(n, m)(t)=C
m(t)·sign[sin(2πfsct)],
где t - время, Cm(t) - псевдослучайный код скорости передачи элементов сигнала m·1023 Mcps, при условии, что значениями +1 или -1 и fsc является частота n·1,023 МГц, а n и m являются числами, выбранными так, что соотношение 2n/m является целым числом,
причем приемник содержит генераторы местного сигнала для генерации текущего сигнала в точке приема и смещенного сигнала в точке приема вместе с корреляторами для осуществления в течение временного интервала длительностью Т корреляции между текущим сигналом в точке приема и модулирующим сигналом, и корреляции между смещенным сигналом в точке приема и модулирующим сигналом,
при этом генераторы местного сигнала выполнены для генерации текущего сигнала в точке приема в виде двоичного сигнала, содержащего в течение указанного интервала времени по меньшей мере один сегмент сигнала ВОС (n2, m) общей длительностью (1-αA)Т в течение указанного временного интервала, причем αA является параметром большим или равным 0 и строго меньшим 1,
и для генерации смещенного сигнала в точке приема в виде двоичного сигнала, содержащего в течение указанного временного интервала по меньшей мере один сегмент сигнала ВОС (n1, m) общей длительностью αBT в течение указанного временного интервала, причем αB является параметром, отличающимся от параметра αA, и строго большим 0 и меньшим или равным 1.
13. Приемник по п.12, содержащий генератор текущего сигнала в точке приема, генератор смещенного сигнала в точке приема, первый коррелятор, оснащенный смесителем для смешивания модулирующего сигнала с текущим сигналом в точке приема, и второй коррелятор, оснащенный смесителем для смешивания модулирующего сигнала со смещенным сигналом в точке приема.
| Способ орошения риса | 1989 |
|
SU1681773A1 |
| US 20050281325 A1, 22.12.2005 | |||
| RU 2005140737 A, 27.08.2006 | |||
| ИНТЕГРИРОВАННЫЙ ПРИЕМНИК СИГНАЛОВ СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 1999 |
|
RU2146378C1 |

