Изобретение относится к области подводной техники, в частности, к комплексам обследования и картографирования дна акваторий, например, шельфа Северного ледовитого океана.
Картографирование и обследование перспективных на наличие углеводородных и минеральных ресурсов участков шельфовой поверхности акваторий являются необходимыми процессами подготовки к детализированным исследованиям, предваряющим основные этапы промышленного освоения донных месторождений полезных ископаемых для чего широко применяются безэкипажные подводные аппараты-роботы, качественно повышающие эффективность и производительность подводно-технических работ, обеспечивающие получение информации о наличии и расположении в осадочных слоях грунта аномальных проявлений его плотности или скальных осколков, представляющих неоправданные сложности при проведении намечаемых подводно-технических операций.
Известен профилограф, разработанный ООО «ЦНИИ «Гидроприбор», позволяющий измерять плотность донных отложений с выявлением аномалий в виде камней или других твердых образований (технические данные профилографа приведены на фиг. 2). Буксируемый, оснащенный информационной связью с носителем, необитаемый подводный аппарат (НПА) принудительно перемещают над поверхностью дна, аппаратурно получают схему расположения донных осадков различной плотности и определяют наличие в них камней или металлических объектов. Однако данный НПА не предполагает его использование во льдах.
Известен принятый авторами за прототип «Глубоководный добычный комплекс и телеуправляемый подводный робот» по патенту РФ №2214510, 2003 г. Комплекс включает добычное судно, соединенное посредством спускоподъемного каната с поплавком, в котором смонтирован успокоитель качки и к нему подвешен гидростат (погруженный блок) с собственным поплавком и обитаемой гондолой. К гидростату крепятся оснащенный манипулятором робот, грузовой контейнер и контейнер с аккумулятором: для питания робота. Комплекс снабжен волоконно-оптической системой связи. Его движители позиционирования выполнены в виде водометов, сопла которых снабжены управляющими клапанами. Однако на комплексе-прототипе отсутствуют системы картографирования и предварительного обследования дна района промысла, он сложен Технически, его использование связано со значительными финансовыми затратами.
Техническим результатом предлагаемого роботизированного комплекса является повышение эффективности и надежности работы комплекса, расширение эксплуатационных возможностей при решении задач обследования и картографирования дна акватории в условиях сплошного ледового покрытия при наличии информационной связи с Центром управления (ЦУ) подводно-техническими работами.
Поставленная техническая задача решается тем, что роботизированный комплекс содержит поплавок и погружной блок, взаимосвязанные кабель-тросом друг с другом и с Центром управления подводно-техническими работами, якорную плиту для их удержания грузовым и информационным кабель-тросом на заданной глубине, самоходный телеуправляемый подводный робот, оснащенный измерительной аппаратурой, гидролокатором бокового обзора и органами управления его перемещением на заданном горизонте Н, который волоконно-оптической связью подключен к аппаратуре Центра управления для управляющих команд и фиксации результатов по картографированию рельефа дна и оценки плотности его пород, жестко смонтированный на погружном блоке гидроакустический маяк, а также погружную антенну, необходимую для функционирования комплекса.
В предлагаемом техническом решении гидроакустический маяк выполняет функцию центрирующего устройства для проведения измерений в процессе обследования дна акватории и пеленгования акустического сигнала гидролокатора бокового обзора подводного робота в движении и информационно маяк взаимосвязан с Центром управления, а по команде с Центра управления с помощью акустического сигнала погружной антенны направленного на маяк фиксируют начало отсчета траектории движения подводного робота в момент пересечения им вертикальной плоскости, определяемой направлением акустического сигнала погружной антенны и вертикалью комплекса, проходящей через гидроакустический маяк.
Аппаратура самоходного телеуправляемого подводного робота включает измерители расстояния до грунта, плотности донных отложений до заданной глубины их залегания и величины изменяемого расстояния центра гидролокатора бокового обзора до гидроакустического маяка и в соответствии с программой ЦУ управляет траекторией движения подводного робота по спирали Архимеда с поддержанием постоянства скорости его перемещения относительно погружного блока и включением в рабочий режим по программе ЦУ утановленных измеряющих трактов через заданные промежутки времени, а также блоков регистрации и обработки данных от измерителей самоходного телеуправляемого подводного робота.
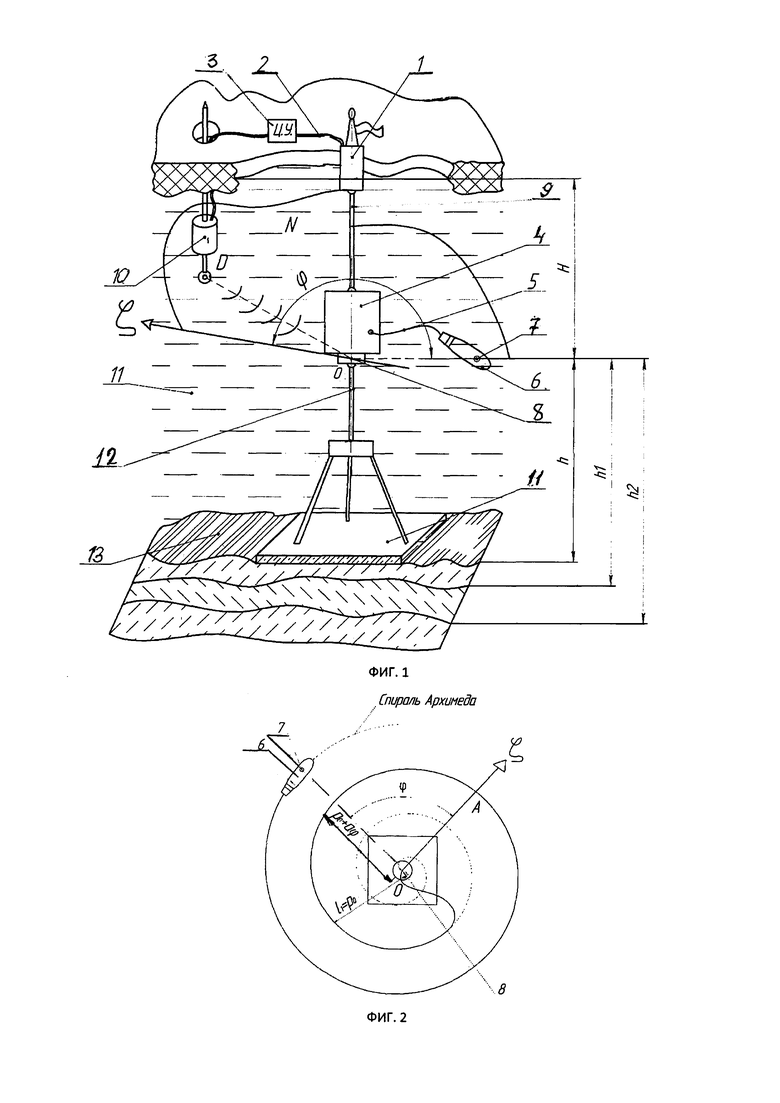
Сущность предлагаемого технического решения робототехнического комплекса поясняется чертежами:
Фиг. 1 - общий вид комплекса;
Фиг. 2 - схема движения робота на горизонтальном уровне.
Робототехнический комплекс содержит поплавок 1, имеющий приспособления для его заметности (проблесковый световой прибор, яркий флажок и т.п.), кабель 2 и, информационно и энергетически связанный с Центром управления 3 подводно-техническими работами, погружной блок 4, включающий транслятор системы телеуправления с помощью оптоволоконного кабеля 5, самоходный подводный робот 6, оснащенный гидролокатором 7 бокового обзора, гидроакустический маяк 8 с аппаратурой пеленгации углового (угол ϕ) смещения подводного робота 6 относительно вертикальной плоскости N, проходящий через точку «0» - центр измерений на гидроакустическом маяке, закрепленного на погружном блоке 4, кабель трос 9 силовой, энергетической и информационной взаимосвязи поплавка 1, погружного блока 4 и акустического маяка 8 и точку D на погружной антенне 10 при этом весь комплекс заякорен на дне с помощью плиты 11 и троса 12.
Робототехнический комплекс работает следующим образом: в заданной координатной точке «0», позиционирование которой возможно, например, с помощью космических аппаратов системы «Глонасс» в полынье сплошного льда или свободной поверхности акватории на дно 13 (фиг.1) акватории погружают якорную плиту 11, погружной блок 4 с расположенным на нем гидроакустическим маяком 8 вместе со связанным с блоком 4 оптоволоконным кабелем 5 подводным роботом 6 и поплавок 1. При этом акустический маяк 8 должен находиться на глубине Н, в горизонте которой будет двигаться робот 6. По кабелю 2 проверяют работоспособность всей аппаратуры комплекса и систему телеуправления роботом 6. В точке D, четко ориентированной на карте поисковой зоны и относительно центра измерений в точке «0» на погружном блоке 4, подают опорный гидроакустический сигнал, воспринимаемый и регистрируемый гидроакустическим маяком 8. Этот сигнал может быть подан с борта обеспечивающего работы носителя судна (понтона) или, например, излучателем - погружной антенной 10, опущенной в воду или в дополнительной лунке ледяного поля. Фиксируют положение системы координат (фиг. 1), прежде всего положение вертикальной плоскости N, походящей через точку «0», и направление оси Z -пересечение вертикальной плоскости N с горизонтальной плоскостью на глубине Н, относительно которой пеленгуется маяком 8 угол ϕ - направление на гидролокатор 7 бокового обзора подводного робота 6. При управлении движением робота добиваются постоянства направленности его гидролокатора 7 бокового обзора на акустический маяк 8.
Запуском движителя робота 6 обеспечивают его движение на глубине Н по циркуляции радиуса р0 измеряемого маяком 8, в момент пересечения его гидролокатора плоскости N Центр управления фиксирует момент времени t=0 и направляет движение робота по окружности радиусом р0 с постоянной скоростью на глубине Н по кривой Архимеда (фиг. 2), характеризующейся зависимостью
р=р0+а*ϕ,
где р - измеряемое и поддерживаемые гидролокатором 7 бокового обзора увеличивающееся расстояние до точки «0» в соответствии с приведенной зависимостью, по которой командами из Центра управления осуществляют управление подводным роботом;
а - постоянная, задаваемая в управляющей аппаратуре величина, характеризующая степень «развертывания» спирали Архимеда. Начиная с момента t=0 через задаваемые постоянные временные промежутки Δt=const и соответственно равными отрезками  пройденного роботом пути дистанционно включается измерительная аппаратура робота 6, которая измеряет, фиксирует и передает информацию в Центр управления расстояние h робота 6 до дна и также местоположение различия плотности в донных осадках.
пройденного роботом пути дистанционно включается измерительная аппаратура робота 6, которая измеряет, фиксирует и передает информацию в Центр управления расстояние h робота 6 до дна и также местоположение различия плотности в донных осадках.
Аппаратурой Центра управления 3 выполняется формирование базы, получаемых от гидроакустического маяка 8 и измерителей опытных данных на роботе 6, и распечатка карты донной поверхности с расположением точек измерений и значениями, характеризующими рельеф дна и плотность его донных отложений.
Анализ получаемой в реальном времени информации повышает достоверность состояния и рельефа дна исследуемой акватории и позволяет обоснованно принять решение, например, о безопасности и целесообразности установки в данном районе донного оборудования.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИДРОАКУСТИЧЕСКИЙ ЛОКАЦИОННЫЙ КОМПЛЕКС | 2010 |
|
RU2426149C1 |
| БЫСТРОРАЗВЕРТЫВАЕМЫЙ КОМПЛЕКС ПОИСКА ЗАТОНУВШИХ ОБЪЕКТОВ | 2020 |
|
RU2746060C1 |
| СПОСОБ СЪЁМКИ ШЕЛЬФОВОЙ ПОВЕРХНОСТИ ДНА АКВАТОРИИ | 2019 |
|
RU2725106C1 |
| Буксируемый подводный аппарат, оснащенный гидроакустической аппаратурой для обнаружения заиленных объектов и трубопроводов и последующего их мониторинга | 2015 |
|
RU2610149C1 |
| ПОГРУЖАЕМАЯ ПЛАТФОРМА-ТРАНСФОРМЕР И РОБОТИЗИРОВАННЫЙ КОМПЛЕКС ДЛЯ ОСУЩЕСТВЛЕНИЯ ПОДВОДНЫХ РАБОТ | 2010 |
|
RU2438914C1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ НАЧАЛЬНЫХ КООРДИНАТ АВТОНОМНОГО НЕОБИТАЕМОГО ПОДВОДНОГО АППАРАТА | 2016 |
|
RU2629916C1 |
| БУКСИРУЕМОЕ УСТРОЙСТВО ДЛЯ КАРТОГРАФИРОВАНИЯ ОБЪЕКТОВ МОРСКОГО ДНА И ИХ ВИЗУАЛЬНОЙ ЗАВЕРКИ | 2018 |
|
RU2679922C1 |
| Система мониторинга технического состояния подводного добычного комплекса | 2021 |
|
RU2774662C1 |
| КОМБИНИРОВАННЫЙ ПОДВОДНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2022 |
|
RU2809785C1 |
| ПОДВОДНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2014 |
|
RU2563074C1 |
Изобретение относится к области подводной техники, в частности к комплексам, предназначенным для обследования и картографирования дна акваторий, например шельфа Северного Ледовитого океана. Роботизированный комплекс для обследования дна акватории содержит поплавок, погружной блок, якорную плиту, взаимосвязанные кабель-тросами между собой и с центром управления подводно-техническими работами. Центр управления соединен волоконно-оптической связью с самоходным телеуправляемым подводным роботом, оснащенным органами управления его перемещением с постоянной скоростью на заданной глубине. На погружном блоке жестко закреплен гидроакустический маяк, установленный с возможностью центрирования измерений в процессе обследования дна. На подводном роботе размещен гидролокатор бокового обзора для пеленгования акустического сигнала с последующей передачей информации в центр управления для корректировки траектории движения робота по спирали Архимеда с начальной точкой отсчета в вертикальной плоскости, определяемой направлением акустического сигнала погружной антенны и вертикалью, проходящих через гидроакустический маяк. Достигается технический результат - повышение эффективности и надежности работы комплекса, расширение эксплуатационных возможностей при решении задач обследования и картографирования дна акватории в условиях сплошного ледового покрытия при наличии информационной связи с центром управления подводно-техническими работами. 2 ил.
Роботизированный комплекс для обследования дна акватории, характеризующийся наличием поплавка, погружного блока, якорной плиты, взаимосвязанных кабель-тросами между собой и с Центром управления подводно-техническими работами, и соединенным с последним волоконно-оптической связью самоходного телеуправляемого подводного робота, оснащенного органами управления его перемещением с постоянной скоростью на заданной глубине, жестко закрепленного на погружном блоке гидроакустического маяка, установленного с возможностью центрирования измерений в процессе обследования дна, гидролокатора бокового обзора, размещенного на подводном роботе для пеленгования акустического сигнала с последующей передачей информации в Центр управления для корректировки траектории движения робота по спирали Архимеда с начальной точкой отсчета в вертикальной плоскости, определяемой направлением акустического сигнала погружной антенны и вертикалью, проходящих через гидроакустический маяк.
| ГЛУБОКОВОДНЫЙ ДОБЫЧНОЙ КОМПЛЕКС И ТЕЛЕУПРАВЛЯЕМЫЙ ПОДВОДНЫЙ РОБОТ | 2002 |
|
RU2214510C1 |
| СПОСОБ СЪЕМКИ РЕЛЬЕФА ДНА АКВАТОРИИ И УСТРОЙСТВО ДЛЯ СЪЕМКИ РЕЛЬЕФА ДНА АКВАТОРИИ | 2012 |
|
RU2519269C1 |
| СИСТЕМА НАВИГАЦИИ АВТОНОМНОГО НЕОБИТАЕМОГО ПОДВОДНОГО АППАРАТА | 2011 |
|
RU2460043C1 |
| СПОСОБ СЕЙСМИЧЕСКОЙ РАЗВЕДКИ ПРИ ПОИСКЕ УГЛЕВОДОРОДОВ И СЕЙСМИЧЕСКИЙ КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2431868C1 |
| ГИДРОАКУСТИЧЕСКИЙ ЛОКАЦИОННЫЙ КОМПЛЕКС | 2010 |
|
RU2426149C1 |
| CN 106114782 B, 18.09.2018. | |||

