Изобретение относится к области газовой промышленности, в частности к способам очистки и диагностирования внутренней полости магистральных газопроводов и может быть использована для повышения надежности и безопасной эксплуатации трубопроводного парка при автоматизации технологических процессов.
При эксплуатации магистрального трубопровода происходит загрязнение его внутренней поверхности турбинным маслом, окалиной, отслоившейся от труб, конденсатом и т.д., что приводит к увеличению гидравлического сопротивления и, соответственно, к снижению пропускной способности трубопровода. На всех проектируемых и вводимых в эксплуатацию магистральных газопроводах предусмотрены узлы (камеры) запуска и приема внутритрубных устройств, которые располагают на неравнопроходных переходах, либо на узлах подключения компрессорных станций. Для повышения энергоэффективности и безопасной эксплуатации магистральных газопроводов необходимо проведение очистки их внутренней поверхности и внутритрубной дефектоскопии, что в конечном итоге ведет к снижению материальных затрат транспортирующего предприятия и предотвращению техногенных аварий с их последствий.
Известно устройство запуска и приема внутритрубных поточных средств очистки и диагностики в трубопровод, которое содержит камеры запуска и приема внутритрубного устройства со штуцерами подачи и отвода продукта, снабженные узлом гибкой связи с линейной частью трубопровода, обеспечивающими их перемещение и поворот в горизонтальной и вертикальной плоскостях, и вдоль оси камеры, причем камеры с одного торца снабжены концевым затвором, состоящим из откидной крышки и полухомутов, шарнирно соединенных между собой на одной оси в нижней части откидной крышки, а в верхней части соединены с одним винтом (RU 2103597, опубл. 27.01.1998 г.) Однако, конструктивная сложность исполнения устройства препятствует широкому применению устройства, кроме того отсутствует возможность удаленного автоматического управления процессом запуска и приема внутритрубного устройства.
Известно устройство для пуска и приема очистных устройств на заданном участке трубопровода длительной протяженности (RU 2449209, опубл. 27.04.2012 г.). Однако, такое устройство рассчитано на трубопроводные системы с давлением перекачиваемой среды не более 2,5 Мпа. Кроме того, автоматизированное управление процессом пуска внутритрубного устройства не предусмотрено.
Наиболее близким к заявляемому техническому решению является автоматизированная система запуска очистных внутритрубных устройств, содержащая расширительную камеру, концевой затвор, запорную арматуру, снабженную электроприводом с возможностью удаленного управления, манометр с датчиком давления, дополнительно содержит сигнализатор хода движения очистного устройства, а расширительная камера выполнена наклонной к трубопроводу и снабжена штоками поочередного запуска очистных устройств, которые оснащены электроприводом с возможностью удаленного управления (RU 2690111,опубл.30.05.2019 г.).
Недостатком данной системы является то, что она применима при транспортировке по трубопроводу жидких сред, а не газа. Системы для транспортировки природного газа отличаются повышенным давлением в трубопроводе и необходимостью предварительной продувки полостей трубопровода для вытеснения воздуха и предотвращения образования взрывоопасной концентрации газа, что известная система-прототип обеспечить не может.
Недостатком также является расположение камеры запуска под углом, что усложнит процесс запасовки внутритрубного устройства для диаметров газопровода от Ду700 до Ду1400.
Таким образом, использование известной системы не позволяет безопасно осуществлять управление технологическим процессом запуска внутритрубного устройства непосредственно в технологической зоне в автоматическом режиме.
Техническая задача заключается в обеспечении безопасности автоматизированного управления процессом запуска ВТУ в среде природного газа непосредственно в технологической зоне.
Технический результат – предотвращение образования взрывоопасной газовоздушной смеси в момент запуска ВТУ за счет автоматизации процесса предварительной контролируемой продувки полостей трубопроводной обвязки и камеры запуска ВТУ, а также предотвращение разрушения элементов узла запуска за счет поэтапного заполнения газом внутренних полостей трубопроводной обвязки и камеры запуска ВТУ.
Технический результат достигается тем, что в системе управления процессом запуска внутритрубного устройства (ВТУ), включающей камеру запуска ВТУ, трубопроводную обвязку, датчики давления, сигнализаторы движения ВТУ, запорную арматуру трубопроводной обвязки, согласно изобретению, трубопроводная обвязка содержит линию запуска ВТУ, снабженную клапаном-регулятором, линии выравнивания давления и продува газа, свечные и обводные линии, при этом система дополнительно включает контроллер, выполненный с возможностью регулирования процессов вытеснения газовоздушной смеси из внутренних полостей трубопроводной обвязки и камеры запуска ВТУ и поэтапного выравнивания давления газа в процессе запуска ВТУ в трубопровод. Причем контроллер связан с клапаном-регулятором линии запуска ВТУ, блоками управления приводами запорной арматуры указанных линий трубопроводной обвязки, с датчиками давления в камере запуска ВТУ, а также с сигнализаторами движения ВТУ.
Существенные признаки, указанные в формуле, направлены на устранение риска аварийной разгерметизации камеры запуска ВТУ и примыкающих к ней трубопроводов, которая может возникнуть в результате неравномерного роста давления при заполнении камеры природным газом, а также в случае воспламенения газовоздушной смеси, находящейся во внутренних полостях линий трубопровода и камеры запуска ВТУ.
Включение в систему контроллера, работающего по заданному алгоритму, а также клапана-регулятора, работающего по командам контроллера, позволяет автоматизировать технологический процесс, обеспечивая безопасность эксплуатации трубопровода во время запуска ВТУ и проведения внутритрубной очистки без участия человека.
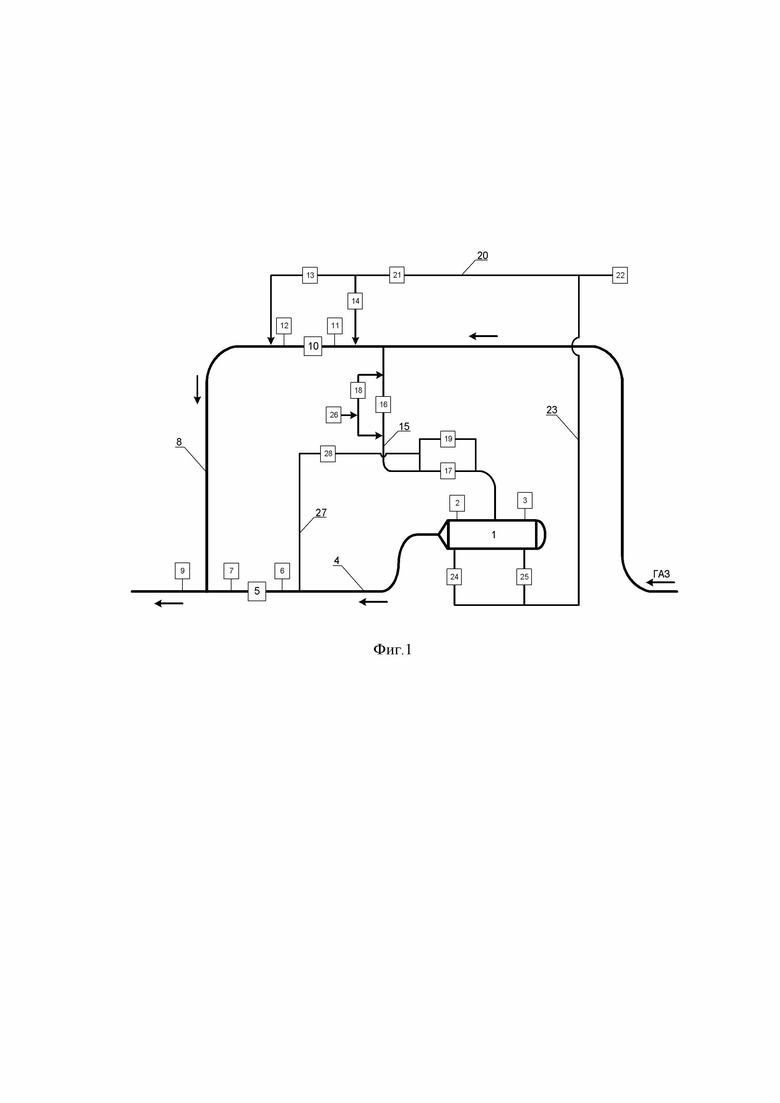
На фиг.1 представлена технологическая схема размещения элементов заявляемой системы. Стрелками указано направление движения газа в трубопроводе.
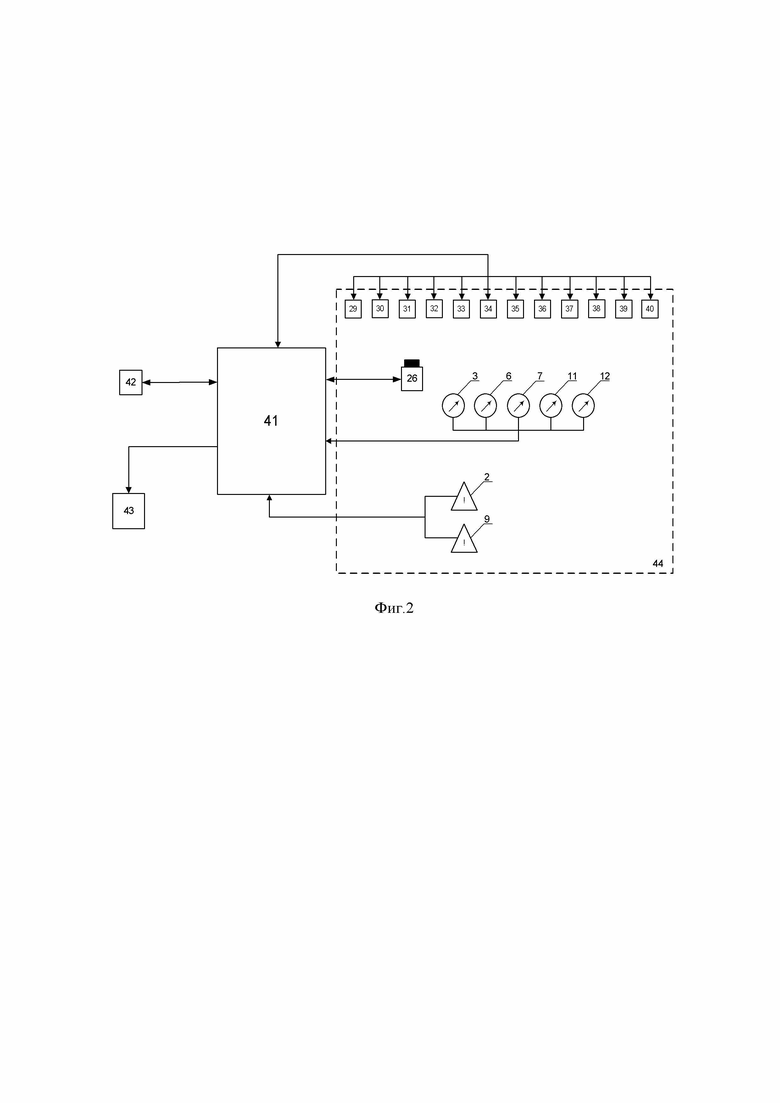
На фиг.2 показана блок –схема системы управления запуском ВТУ, где:
1- камера запуска внутритрубного устройства (ВТУ);
2- сигнализатор движения ВТУ;
3- датчик давления газа в камере запуска 1;
4- основная линия трубопроводной обвязки;
5- линейный кран основной линии 4;
6- датчик давления перед линейным краном 5;
7- датчик давления после линейного крана 5;
8- обводная линия трубопроводной обвязки;
9- сигнализатор движения ВТУ после обводной линии 8;
10- обводной кран;
11- датчик давления перед обводным краном 10;
12- датчик давления после обводного крана 10;
13,14 – байпасные краны;
15- линия запуска газа;
16,17- запускающие краны линии запуска 15;
18,19- байпасные краны линии запуска 15;
20- свечная линия трубопроводной обвязки;
21- кран свечной линии 20;
22-продувочная свеча;
23-линия продува газа;
24,25- продувочные краны;
26-клапан-регулятор;
27- линия выравнивания давления газа;
28-кран линии 27 выравнивания давления газа;
29-40 – блоки управления приводами кранов;
41- контроллер;
42-рабочее место оператора;
43-диспетчераский пункт;
44- технологическая зона.
В качестве контроллера 41 используется программно-логический устройство, которое предназначено для получения и обработки поступающих данных с технологических объектов в реальном времени с целью контроля исполнения и регулирования осуществления технологических операций, выявления и предупреждения нештатных событий.
Разработанное заявителем и установленное на контроллере 41 специальное программное обеспечение позволяет осуществлять управление технологическим процессом без присутствия обслуживающего персонала непосредственно в технологической зоне 44 производства работ.
Контроллер 41 выполнен с возможностью подключения непосредственно к системе линейной телемеханики (не показана) через модем (не показан) по стандартным протоколам передачи данных (ОРС, Modbus), в своем составе содержит необходимое количество плат ввода-вывода для подключения блоков управления приводами кранов запорной арматуры, клапана-регулятора, сигнализаторов движения и датчиков давления. Он также имеет в своём составе блок сопряжения (не показан) со смежными системами, позволяющий переключать контроль и управление технологическим процессом на центральный диспетчерский пункт 43.
Запорная арматура системы включает краны 5,10,13,14,16,17,18,19,21,24,25,28, приводы которых оснащены блоками управления 29-40, позволяющими регулировать положение кранов (открыт/закрыт) с помощью сигналов, поступающих с контроллера 41.
Заявляемая система работает следующим образом.
Изначально камера запуска 1 находится в закрытом состоянии, во внутренней полости которой присутствует газовоздушная смесь (ГВС) под давлением. Поэтому прежде чем открыть камеру 1 для «запасовки» ВТУ необходимо стравить ГВС из камеры 1 и из внутренних полостей трубопроводной обвязки, с которой она соединена.
Перед «запасовкой» ВТУ в камеру запуска 1 внутренние полости линий трубопроводной обвязки и камеры 1 опорожняют от ГВС. Для этого перед началом работы краны 5,17,19,28,16,13,14,21 закрывают, краны 10,24,25 – открывают, а клапан-регулятор 26 держат в закрытом положении.
После этого открывают концевой затвор (не показан) камеры 1 и с помощью кран-балки и запасовочных салазок (не показаны) размещают ВТУ внутрь камеры 1. Затем плотно закрывают концевой затвор камеры 1, затягивая его фиксаторы и зажимные механизмы (не показаны). ВТУ располагают в камере 1 между патрубками кранов 24,25 линии 20 трубопроводной обвязки. В камере 1 на входе размещен датчик давления 3, а на выходе – сигнализатор 2 движения ВТУ.
Затем открывают краны 19 и 28. Полость камеры 1 продувают после открытия клапана-регулятора 26 газом с давлением не более 1 кгс/см2, а продувку осуществляют до тех пор, пока содержание кислорода в ГВС не будет превышать 2%. Контроль содержания кислорода осуществляют с помощью газоанализатора (не показан).
После продувки и закрытия кранов 24,25 полость камеры 1 заполняют газом путем открытия клапана-регулятора 26 по сигналу контроллера 41, при этом скорость роста давления должна быть не более 10 кгс/см2 в минуту. Скорость роста давления контролируется и регулируется контроллером 41 по показаниям датчиков давления 3 и 6.
Заполнение газом камеры 1 производят поэтапно.
На 1 этапе осуществляют заполнение камеры 1 до 1/3 величины рабочего давления в газопроводе. На 2 этапе - заполнение до 2/3 величины рабочего давления. На 3 этапе – заполнение газом камеры 1 до величины рабочего давления.
Регулирование заполняемости камеры 1 осуществляет контроллер 41, на который поступает сигнал с датчиков давления 3 и 6. Это необходимо для предотвращения разрушения элементов узла запуска благодаря поэтапному заполнению газом внутренних полостей трубопроводной обвязки и камеры запуска ВТУ.
После проведения каждого этапа камеру 1 выдерживают под давлением в течение 20 минут, проводят осмотр оборудования и определяют возможные утечки прослушиванием, газоанализатором, либо контроллер 41 сигнализирует об утечках, фиксируя падение давления.
При обнаружении утечек заполнение камеры 1 останавливают, определяют причину утечки, давление газа сбрасывают через свечную линию 20.
После устранения причины утечки заполнение камеры 1 газом производят повторно.
После выравнивания давления в камере 1 и в трубопроводной обвязке по показаниям датчиков 3 и 6 контроллер 41 подает сигнал на открытие кранов 5,16,17, и закрытие кранов 19,18,28. После чего, поступает сигнал на закрытие крана 10. Закрывая кран 10, система создает перепад давления на ВТУ в камере 1.
За счет перепада давления в диапазоне от 0,5 до 1,5 кгс/см2 (расчетные данные) газ, проходя через линию запуска газа 15, выталкивает ВТУ из камеры запуска 1 в основную линию 4 и далее - в газопровод. Выход ВТУ из камеры 1 контролирует сигнализатор 2 движения ВТУ.
После прохождения ВТУ через сигнализатор 9 контроллер 41 подает команду на открытие обводного крана 10, закрытие линейного крана 5 и запускающего крана 16. Камера 1 освобождается от газа через линию продувки газа 23 открытием продувочных кранов 24,25 по командам с контроллера 41.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ откачки газа из трубопроводной обвязки камеры запуска очистных устройств и устройство для его осуществления | 2021 |
|
RU2775332C1 |
| СПОСОБ ВЫТЕСНЕНИЯ ВРЕМЕННЫХ ГЕРМЕТИЗИРУЮЩИХ УСТРОЙСТВ ПРИ ЭКСПЛУАТАЦИИ МАГИСТРАЛЬНЫХ ГАЗОПРОВОДОВ В МНОГОНИТОЧНОМ ИСПОЛНЕНИИ | 2019 |
|
RU2728112C1 |
| УСТРОЙСТВО ДЛЯ ОЧИСТКИ И ИНСПЕКТИРОВАНИЯ ВНУТРЕННЕЙ ПОЛОСТИ ТРУБОПРОВОДА | 2024 |
|
RU2841223C1 |
| МОБИЛЬНАЯ КАМЕРА ЗАПУСКА И ПРИЕМА ВНУТРИТРУБНЫХ УСТРОЙСТВ (ВТУ) И СРЕДСТВ ОЧИСТКИ И ДИАГНОСТИКИ (СОД) | 2022 |
|
RU2804217C1 |
| Способ вытеснения газовоздушной смеси через стояки отбора газа и устройство для его осуществления | 2021 |
|
RU2796731C1 |
| Байпасная и импульсная обвязки линейных кранов в составе крановых узлов многониточных магистральных газопроводов, проложенных в одном технологическом коридоре | 2021 |
|
RU2777810C1 |
| СПОСОБ ОБЕСПЕЧЕНИЯ РЕЖИМА ДВИЖЕНИЯ ДИАГНОСТИЧЕСКОГО СНАРЯДА В ЭТАНОПРОВОДЕ | 2016 |
|
RU2644431C2 |
| СПОСОБ ОБЕСПЕЧЕНИЯ РЕЖИМА ДВИЖЕНИЯ ДИАГНОСТИЧЕСКОГО СНАРЯДА В ЭТАНОПРОВОДЕ | 2016 |
|
RU2644429C2 |
| СПОСОБ ПРОДУВКИ УЧАСТКА ГАЗОПРОВОДА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2018 |
|
RU2741178C2 |
| СПОСОБ ОБЕСПЕЧЕНИЯ РЕЖИМА ДВИЖЕНИЯ ДИАГНОСТИЧЕСКОГО СНАРЯДА В ЭТАНОПРОВОДЕ | 2016 |
|
RU2644430C2 |
Изобретение относится к области газовой промышленности, в частности к способам очистки и диагностирования внутренней полости магистральных газопроводов, и может быть использовано для повышения надежности и безопасной эксплуатации трубопроводного парка при автоматизации технологических процессов. Система управления процессом запуска внутритрубного устройства (ВТУ) включает камеру запуска ВТУ, трубопроводную обвязку, датчики давления, сигнализаторы движения ВТУ, запорную арматуру трубопроводной обвязки. Согласно изобретению трубопроводная обвязка содержит линию запуска ВТУ, снабженную клапаном-регулятором, линии выравнивания давления и продува газа, свечные и обводные линии. При этом система дополнительно включает контроллер, выполненный с возможностью регулирования процессов вытеснения газовоздушной смеси из внутренних полостей трубопроводной обвязки и камеры запуска ВТУ и поэтапного выравнивания давления газа в процессе запуска ВТУ в трубопровод. Причем контроллер связан с клапаном-регулятором линии запуска ВТУ, блоками управления приводами запорной арматуры указанных линий трубопроводной обвязки, с датчиками давления в камере запуска ВТУ, а также с сигнализаторами движения ВТУ. Техническая задача заключается в обеспечении безопасности автоматизированного управления процессом запуска ВТУ в среде природного газа непосредственно в технологической зоне. Технический результат – предотвращение образования взрывоопасной газовоздушной смеси в момент запуска ВТУ за счет автоматизации процесса предварительной контролируемой продувки полостей трубопроводной обвязки и камеры запуска ВТУ, а также предотвращение разрушения элементов узла запуска за счет поэтапного заполнения газом внутренних полостей трубопроводной обвязки и камеры запуска ВТУ. 2 ил.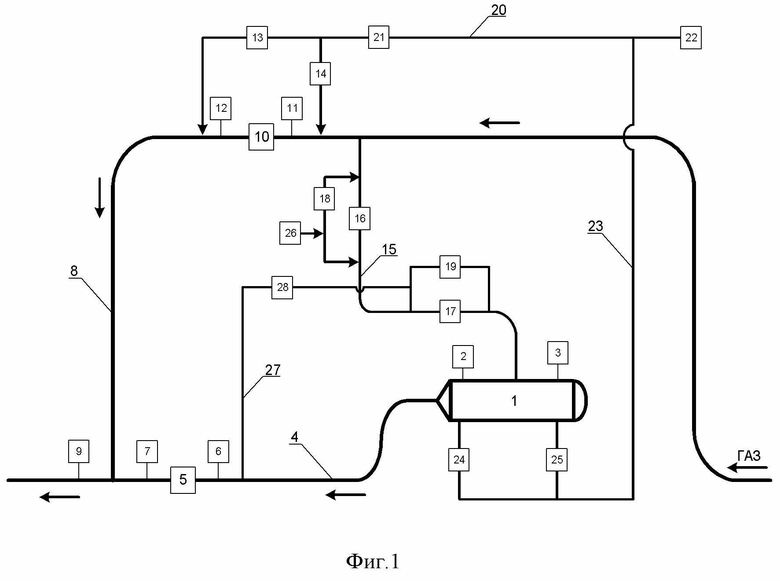
Система управления процессом запуска внутритрубного устройства (ВТУ), включающая камеру запуска ВТУ, трубопроводную обвязку, датчики давления, сигнализаторы движения ВТУ, запорную арматуру трубопроводной обвязки, отличающаяся тем, что трубопроводная обвязка содержит линию запуска ВТУ, снабженную клапаном-регулятором, линии выравнивания давления и продува газа, свечные и обводные линии, при этом система дополнительно включает контроллер, выполненный с возможностью регулирования процессов вытеснения газовоздушной смеси из внутренних полостей трубопроводной обвязки и камеры запуска ВТУ и поэтапного выравнивания давления газа в процессе запуска ВТУ в трубопровод, причем контроллер связан с клапаном-регулятором линии запуска ВТУ, блоками управления приводами запорной арматуры указанных линий трубопроводной обвязки, с датчиками давления в камере запуска ВТУ, а также с сигнализаторами движения ВТУ.
| УСТРОЙСТВО И СПОСОБ ДЛЯ ЗАПУСКА ОДНОГО ИЛИ БОЛЕЕ СКРЕБКОВ В ТЕХНОЛОГИЧЕСКИЙ ПОТОК | 2015 |
|
RU2713934C2 |
| АВТОМАТИЗИРОВАННАЯ КАМЕРА ЗАПУСКА ОЧИСТНЫХ УСТРОЙСТВ | 2018 |
|
RU2690111C1 |
| US 4709719 A1, 01.12.1987 | |||
| US 2022003629 A1, 06.01.2022 | |||
| US 5913637 A, 22.06.1999 | |||
| УСТРОЙСТВО ЗАПУСКА И ПРИЕМА ПОТОЧНЫХ СРЕДСТВ В ТРУБОПРОВОД | 1997 |
|
RU2103597C1 |

