Изобретение относится к области эксплуатации систем газоснабжения, в частности к организации и проведению неразрушающего контроля, и может быть использовано для создания оптимальных режимов движения дефектоскопов этанопроводов при внутритрубной диагностике.
Из существующего уровня техники известен способ введения рабочего снаряда типа «крот» в находящийся в эксплуатации трубопровод, такой как трубопровод для текучих сред, причем трубопровод во время эксплуатации засверливают и рабочий снаряд запускают в трубопровод через засверленное отверстие посредством пневмо- или гидроцилиндра (см. патент № RU 2372549 «Способ, устройство и рабочий снаряд для очистки и инспекции «Кротонепроходимых» трубопроводов, авторов Штромайер Уве (DE), Копп Гуннар (US), МПК F16L 55/46, дата публикации 27.06.2003).
Недостатком известного способа является то, что его можно надежно применять при относительно невысоких рабочих давлениях в трубопроводе, при этом направляющее устройство необходимо удерживать в нужном положении против рабочего давления в трубопроводе посредством удерживающего устройства, что приводит усложнению способа за счет использования дополнительных технических средств. Кроме указанного известное техническое решение предполагает использование дополнительных средств, таких как врезка дополнительного трубопровода в магистраль, снижающее надежность осуществления диагностики.
Известен способ управления внутритрубным объектом в процессе проведения диагностики трубопровода путем накопления диагностической и телеметрической информации с помощью команд управления по двум каналам управления - низкочастотному электромагнитному каналу и радиоканалу метрового диапазона волн, причем низкочастотные электромагнитные сигналы излучают и принимают с помощью приемо-передающего оборудования, установленного вне и внутри трубопровода, а сигналы, передающиеся по радиоканалу метрового диапазона волн, излучают и принимают с помощью приемо-передающего оборудования, установленного внутри трубопровода, используя его в качестве волновода, с размещением одного комплекта приемо-передающего оборудования метрового диапазона волн на внутритрубном объекте, передачу команды управления осуществляют последовательно по двум каналам управления, первоначально команда управления по низкочастотному электромагнитному каналу с помощью приемо-передающего оборудования, установленного вне трубопровода, передается через стенку внутрь трубы и принимается приемо-передающим оборудованием, установленным внутри трубопровода, затем команда управления преобразуется и с помощью приемо-передающего оборудования метрового диапазона волн, размещенного внутри трубопровода, передается по радиоканалу на приемо-передающее оборудование, размещенное на внутритрубном объекте, передачу квитанции о выполнении внутритрубным объектом команды управления осуществляют последовательно по двум каналам управления, первоначально квитанция по радиоканалу метрового диапазона волн с помощью приемно-передающего оборудования, размещенного на внутритрубном объекте, передается на приемо-передающее оборудование метрового диапазона волн, размещенное внутри трубопровода, затем квитанция преобразуется и по низкочастотному электромагнитному каналу с помощью приемо-передающего оборудования, установленного внутри трубопровода, передается через стенку трубы наружу и принимается приемно-передающим оборудованием, установленным вне трубы, а передачу накапливаемой на внутритрубном объекте, диагностической и телеметрической информации осуществляют с помощью приемо-передающего оборудования метрового диапазона волн, размещенного на внутритрубном объекте, принимают приемо-передающим оборудованием, размещенным в трубопроводе, и фиксируют в запоминающем устройстве, входящем в его состав (см. патент № RU 2528790 «Способ и устройство предназначены для управления внутритрубным объектом», авторы: Скворцов В.С. и др., МПК F17D 5/00, дата публикации 20.09.2014).
Недостатком известного способа является привязка его положения к текущим координатам в процессе проведения диагностики трубопровода путем накопления диагностической и телеметрической информации, заключенной в управлении внутритрубным объектом с помощью команд управления по двум каналам управления. Это приводит к необходимости предварительного накопления и анализа поступившей информации, что приводит к увеличению общего временного интервала осуществления управляющих мероприятий, сложность аппаратурного исполнения и требование к высококвалифицированным специалистам, способным эксплуатировать указанное оборудование.
Известен способ управления двухмодульным дефектоскопом-снарядом при внутритрубной дефектоскопии, заключающийся в управлении дефектоскопом-снарядом по полученной информации о состоянии материала стенок трубы и величинах электрического тока, распределенного в стенках трубы в процессе перемещения дефектоскопа-снаряда по трубопроводу в потоке транспортируемого продукта, привязке к текущим координатам в процессе движения, что информация о состоянии трубопровода, в том числе и изображение его внутренней поверхности, получаемая в процессе движения дефектоскопа-снаряда по трубопроводу в потоке транспортируемого продукта-газа в газообразном состоянии, передается с борта дефектоскопа-снаряда по радиосвязи в метровом диапазоне длин волн по трубопроводу на насосные станции, расположенные на трубопроводе, между которыми находится дефектоскоп-снаряд путем возбуждения в трубопроводе электромагнитной волны типа Н11, диапазон рабочих частот радиосвязи определен в пределах 1,25±0,05 относительно критической частоты для этого типа волны в дефектоскопируемом волноводе, обрабатывается на насосных станциях, и по результатам обработки с насосных станций по радиолинии в этом же частотном диапазоне подаются команды на дефектоскоп-снаряд для его управления в процессе перемещения по трубопроводу (см. патент № RU 2425278 «Способ управления двухмодульным дефектоскопом-снарядом в процессе внутритрубной дефектоскопии и устройство для его осуществления», авторы: Шило В.К. и др., МПК F17D 5/00, дата публикации 27.07.2011).
Недостатком известного способа является отсутствие возможности оперативно управлять режимами движения дефектоскопов-снарядов в процессе их нахождения внутри трубопровода, особенно это важно при обследовании магистральных трубопроводов большой протяженности. Учитывая существенные затухания радиоволн при распространении в трубопроводе, возможные изменения в конфигурации труб газопровода, наличие изгибов, врезок с меньшим диаметром и локальных неоднородностей, необходима оптимизация как диапазона длин волн, в котором осуществляется радиосвязь, так и предельно допустимого интервала длин волн в пределах выбранного диапазона, используемого для этих целей, вне которого возможно возникновение высших гармоник с высоким затуханием или попадание в режим запредельного волновода.
Известен способ организации движения дефектоскопов при дефектоскопии магистрального газопровода, состоящий в том, что помещают дефектоскоп в трубопровод, создают перепад давлений путем регулировки давления до дефектоскопа и после него вдоль трубопровода, поддерживают скорость движения снаряда по трубопроводу за счет регулировки давления на тянущей манжете, осуществляют сканирование внутренней поверхности трубопровода во время движения дефектоскопа вдоль трубопровода, при движении в зависимости от изменения скорости регулируют перепад давления на тянущей манжете путем перепуска части газа через регулируемые отверстия, и тем самым поддерживают скорость движения снаряда в определенных пределах по трубопроводу, при этом расстояние между опорной и тянущей манжетами устанавливают не менее 1,2 от диаметра измеряемого трубопровода, а также тем, что придают заданную скорость вращением вокруг своей оси путем установки башмаков магнитных модулей под определенным углом к оси вращения, угол установки башмаков меняют от 0 до 10°, осуществляют поперечное намагничивание участков стенок труб газопровода, причем систему намагничивания выполняют в виде замкнутого в плане магнита, создают в зоне контроля напряженность магнитного поля, равную напряженности технического насыщения за счет того, что расстояние между магнитами устанавливают в соответствии с определенным алгоритмом, не зависящим от диаметра трубы, намагничивание производят участками с попарно встречными направлениями магнитного поля в каждом сечении, при этом зоны контроля первого и второго блоков намагничивания формируют таким образом, чтобы они перекрывали друг друга не менее чем на 10%, при этом общая длина зоны контроля должна быть равна внутреннему периметру сечения трубопровода, причем датчики располагают в виде матрицы над поверхностью трубопровода и покрывающей периметр трубопровода с заданным шагом между датчиками, осуществляют динамическое питание датчиков, коммутация питания осуществляют по кругу и считывание осуществляют по кругу, для исключения потери записываемой информации расстояние между датчиками не должно превышать 3,5 мм, с помощью индукционного датчика измеряют расстояние от поверхности трубопровода до точки измерения магнитного поля рассеивания, при этом расстояние от магнита до ближайшего датчика должно быть не менее 25 мм, шаг съема информации вдоль оси трубопровода устанавливают не более 3,5 мм за счет перепуска газового потока через дефектоскоп, фиксируют утечки магнитного поля в местах дефектов, осуществляют многоканальное измерение и высокочастотное считывание полученной информации, формируют математическую модель полей дискретной функции пространственного распределения дискретной функции магнитного поля, анализируют указанное распределение и селектируют дефекты по виду поверхностной ориентации и определяют их параметры, осуществляют многоканальное измерение и высокочастотное считывание полученной информации, систематизируют информацию о дефектах по группам, например: общая коррозия, продольные магистральные трещины, определяют сортамент труб, ориентацию продольных сварных швов, анализируют телеметрическую информацию о параметрах, характеризующих движение дефектоскопа, измерение скорости движения производят на строго фиксированной базе, отношение площади сечения проволоки к площади сечения магнитопровода равно 0,25 (см. заявка на изобретение № RU 2004125461 «Способ дефектоскопии магистрального газопровода и магистральный магнитный проходной дефектоскоп», авторы: Коваленко А.Н., Седых A.A., (RU) МПК G01N 27/87, F17D 5/06, дата публикации 10.02.2006).
Недостатком известного способа является большая трудоемкость процесса, высокие требования к персоналу, сложность регулировки отверстий и необходимость прокладки опорной и тянущейся манжеты, что усложняет процесс и препятствует его применению для реализации поставленных задач.
Известен способ организации движения внутритрубных дефектоскопов, описанный в способе выявления дефектов труб газопровода, включающий выбор участка газопровода, подлежащего внутритрубной инспекции, пропуск внутритрубных инспекционных снарядов по выбранному участку газопровода через камеры запуска и приема внутритрубных инспекционных снарядов, подключенные к действующему газопроводу, и проведение внутритрубной дефектоскопии, пропуск внутритрубных инспекционных снарядов ведут через камеры запуска и приема, выполненные в виде труб, присоединительный диаметр которых соответствует диаметру газопровода, снабженных отсечными кранами и затворами и временно подключенных к действующему газопроводу через свечные обвязки линейных кранов, граничащих с участком, подлежащим инспекции (см. патент № RU 2211998 «Способ выявления дефектов труб газопровода», авторы: Мельник В.И. и др., МПК F17D 3/08, дата публикации 10.09.2003).
Недостатком известного способа является невозможность использования его на оборудованных стационарными камерами запуска и приема инспекционных снарядов, сложность предварительных подготовительных работ, малый диапазон регулирования движения внутритрубного снаряда.
Известен способ перемещения внутритрубного транспортного снаряда в магистральном трубопроводе с заданной равномерной скоростью, включающий подачу от внешнего источника в начале обследуемого участка трубопровода с открытым концом потока рабочей среды к внутритрубному транспортному снаряду, создание перепада давлений рабочей среды на нем и перемещение его усилием, создаваемым перепадом давлений, а также создание тормозящего усилия на внутритрубном транспортном снаряде относительно поверхности трубопровода, величина которого зависит от характеристики рельефа местности, по которой проложен участок трубопровода, что существенно, рабочую среду применяют воздушную или газовую, величину давления потока которой заранее задают в зависимости от рельефа местности, контролируют скорость перемещения снаряда, в случае отклонения величины последней от заданной корректируют ее путем изменения величины тормозящего усилия, для чего часть энергии потока рабочей среды преобразуют в гидравлическую и электрическую виды энергии, которые используют для создания тормозящего усилия (см. патент № RU 2369454 «Способ перемещения внутритрубного транспортного снаряда в магистральном трубопроводе с заданной равномерной скоростью и устройство для его осуществления», автор: Хасанов И.Ф., МПК В08В 9/055, дата публикации 10.10.2009).
Недостатком известного способа является использование энергии в виде потока среды с заданным постоянным давлением для перемещения снаряда в трубопроводе и преобразования части энергии потока в гидравлическую и электрическую для создания контролируемого тормозного усилия снаряда о стенки трубопровода с целью корректировки величины скорости в случае ее отклонения от заданной, что усложняет процесс движения, создание регулирующих усилий требует специальной конструкции диагностических снарядов.
Наиболее близким к заявляемому техническому решению по совокупности существенных признаков является способ перемещения аппарата внутритрубного контроля в магистральном газопроводе с заданной равномерной скоростью, включающий введение аппарата в камеру запуска (приема), замену воздуха в камере запуска (приема) на природный газ с выравниванием давления в камере запуска (приема) и в газопроводе, выдвижение аппарата из камеры запуска (приема) в линейную часть газопровода, воздействие на конструкцию аппарата, частично перекрывающую поперечное сечение газопровода, потока транспортируемого газа, перемещение аппарата по линейной части газопровода усилием, создаваемым перепадом давления потока транспортируемого газа и осевым усилием, создаваемым воздействием мотор-генератор-колес на внутреннюю поверхность газопровода, подзарядку аккумуляторной батареи системы электропитания, контроль скорости перемещения аппарата, коррекцию скорости перемещения аппарата в случае отклонения ее величины от заданной, выдвижение аппарата из линейной части газопровода в камеру приема (запуска), включение и выключение аппарата в работу по наличию или отсутствию в газопроводе давления рабочей среды сверх заданного минимального уровня, выдвижение аппарата из камеры запуска (приема) в линейную часть газопровода и выдвижение аппарата из линейной части газопровода в камеру приема (запуска) осуществляют с помощью мотор-генератор-колес, работающих в двигательном режиме от аккумулятора системы электропитания, перемещение аппарата по линейной части газопровода обеспечивают с минимальным поперечным смещением продольной оси аппарата относительно оси симметрии газопровода за счет пружинных блоков подвески мотор-генератор-колес, коррекцию скорости перемещения аппарата в случае отклонения ее величины от заданной осуществляют с помощью тормозного, двигательного и пассивного режимов работы мотор-генератор-колес, при независимом управлении каждого из мотор-генератор-колес, который и выбран в качестве прототипа (см. патент №RU 2451867 «Аппарат внутритрубного контроля и способ перемещения его в магистральном газопроводе с заданной равномерной скоростью», авторы: Натаров Б.Н. и др., МПК F16L 55/26, F16L 101/30, дата публикации 27.05.2012).
Недостатками технического решения, описанного в прототипе, являются использование тормозного, двигательного и пассивного режима работы мотор-генератор-колес, при независимом управлении каждого из мотор-генератор-колес в отдельности, а также дополнительные затраты на систему электропитания с аккумуляторной батареей, в целом снижающей надежность проведения работ по диагностике. Конструктивная сложность приводит к высоким требованиям к обслуживающему персоналу. Введение дополнительных элементов в устройство ведет к удорожанию оборудования, а как следствие и самого осуществления описанного способа (для потокового производства).
Технической задачей предлагаемого способа обеспечения режима движения диагностического снаряда в этанопроводе является создание способа организации режима движения диагностических снарядов с регулированием скоростей движения при проведении внутритрубной дефектоскопии (диагностики) этанопровода в зависимости от условий прокладки этанопровода при отсутствии параллельной нитки газопровода с использованием имеющихся коммуникаций, запорной арматуры и мобильной ресиверной установки.
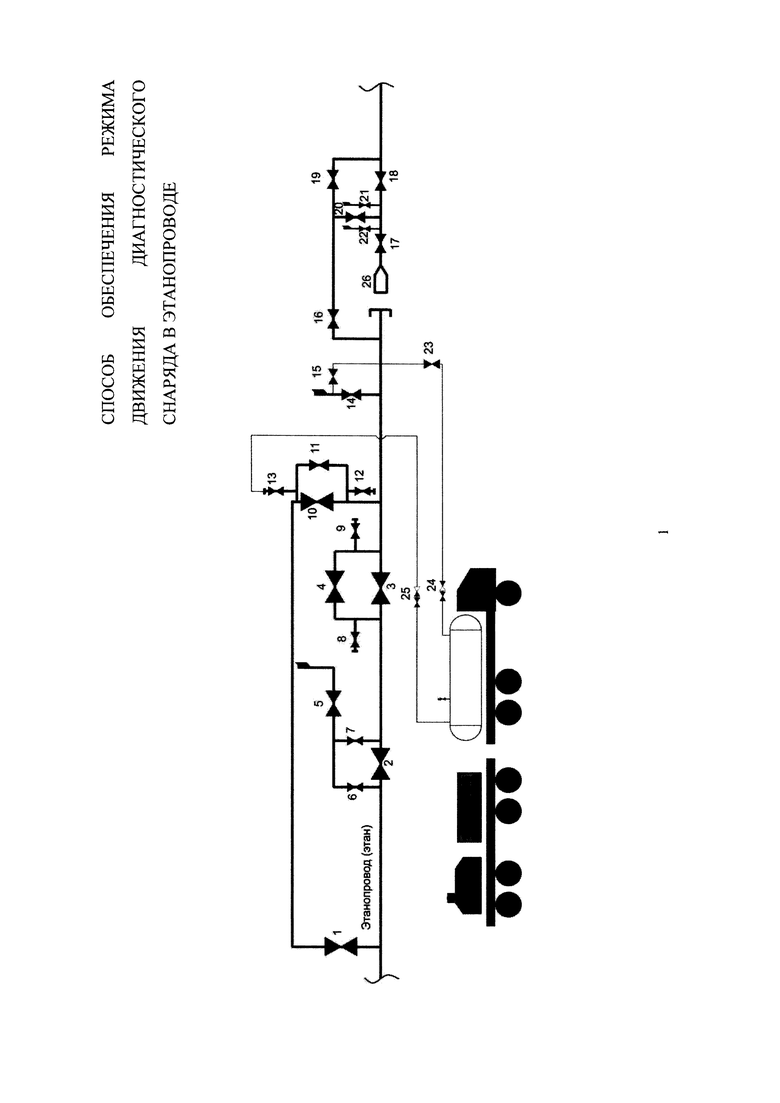
Поставленная техническая задача в способе обеспечения режима движения диагностического снаряда в этанопроводе, включающем перемещение диагностического снаряда с заданной равномерной скоростью, введение диагностического снаряда в камеру запуска (приема), замену воздуха в камере запуска (приема) с выравниванием давления в камере запуска (приема), выдвижение диагностического снаряда из камеры запуска (приема), воздействие на конструкцию диагностического снаряда, частично перекрывающую поперечное сечение, перемещение диагностического снаряда усилием, создаваемым перепадом давления, достигается тем, что способ осуществляется по следующим этапам: на первом этапе при закрытых кранах врезки 14 и 13 проводится монтаж коммуникаций между этанопроводом и мобильной ресиверной установкой, подключаемой через обратные клапаны 25 и 24, и через свечные отводы, с установкой регулирующей запорной арматуры 15 и 23, на втором этапе заглушаются свечные отводы в местах присоединения и закрываются краны 10, 11, 3, 4, при этом постоянно закрыты краны 6, 7, 8, 9, 12, 13, 22, 21, на третьем этапе открывают кран 17, стравливают этан между кранами 17 и 18 и через камеру запуска (приема) 26 заводят в трубное пространство этанопровода диагностический снаряд, на четвертом этапе закрывают кран 17 и открывают краны 20, 16, 19 для выравнивания давления между кранами 17 и 18 и давление после крана 18, на пятом этапе закрывают кран 19 и работой кранов 24 и 25 при открытых кранах 14, 13 добиваются перепада давления между кранами 17 и 18 и пространством этанопровода за краном 18 до 2-3 атм, далее мобильная ресиверная установка отбирает этан из этанопровода через открытые краны 13, 25, повышает давление этана и далее этан из мобильной ресиверной установки поступает через коммуникации при открытых кранах 24, 23, 15, 14, 16 для поднятия давления в отключенном участке на 2-3 атм, за краном 16, на шестом этапе в конце обследуемого участка открывают кран для обеспечения стравливания этана в атмосферу и создания необходимого перепада давления, на седьмом этапе проводят открытие крана 18 при закрытом 19 и, регулируя давление за 18 краном, добиваются постоянного перепада в 5 атм, на восьмом этапе производят регулировку прохождения диагностического снаряда за счет регулировки кранов 24, 25.
Предложенный способ обеспечения режима движения диагностического снаряда в этанопроводе не имеет аналогов. На этанопроводе предложен способ организации движения диагностического снаряда с использованием в качестве рабочей (движущей) среды - этана, отобранного из действующей ветки этанопровода. При этом плавное регулирование прохождения снаряда осуществляется за счет работы мобильной ресиверной установки. За счет создания дополнительного объема осуществляется сглаживание пульсаций, возникающих при движении диагностических снарядов и при работе регулирующей арматуры крановой обвязки этанопровода.
Расширен диапазон регулирования прохождения диагностического снаряда вследствие применения предложенной схемы за счет создания в коммуникациях искусственных свободных объемов, служащих ресивером и дополнительным свободным объемом мобильной ресиверной установки для сглаживания пульсаций, вызванных прохождением диагностического снаряда в этанопроводе.
Предлагаемый способ обеспечения режима движения диагностического снаряда в этанопроводе универсальный и подходит для всех участков этанопровода. Дополнительный объем мобильной ресиверной установки позволяет расширить диапазон регулирования, компенсировать пульсации, возникающие при регулировании движения диагностических снарядов.
Основное достоинство предлагаемого способа обеспечения режима движения диагностического снаряда в этанопроводе - это возможность осуществления внутритрубной дефектоскопии без привлечения дополнительных средств. Применение мобильной ресиверной установки позволяет обеспечить сглаживание пульсаций в системе, расширить диапазоны регулирования прохождения диагностических снарядов при обследовании этанопровода.
Анализ известных технических решений, проведенный по научно-технической и патентной документации, показал, что совокупность существенных признаков заявляемого технического решения не известна из уровня техники, следовательно, оно соответствует условиям патентоспособности «новизна» и «изобретательский уровень». Имеет практическую пригодность для газотранспортных предприятий.
Заявляемое техническое решение поясняется схемой, иллюстрирующей способ организации пропуска диагностического снаряда при проведении внутритрубной дефектоскопии этанопровода.
Способ осуществляется по следующим этапам: в случае, если проектом этанопровода не предусмотрена стационарная камера запуска (приема) на участках, где необходимо проводить внутритрубную диагностику, то предварительно в начале обследуемого участка, при закрытых кранах 17, 14, 10, 11, 3, 4 монтируется камера запуска (приема) 26. Монтаж камеры запуска (приема) осуществляется путем выреза катушки этанопровода (его разрыва) под место установки камеры запуска (приема). Также если не предусмотрено проектом наличия камеры запуска (приема) в конце обследуемого участка этанопровода, то производят монтаж камеры запуска (приема) в конце диагностируемого участка этанопровода, на первом этапе при закрытых кранах врезки 14 и 13 проводится монтаж коммуникаций между этанопроводом и мобильной ресиверной установкой, подключаемой через обратные клапаны 25 и 24, и через свечные отводы, с установкой регулирующей запорной арматуры 15 и 23. На втором этапе заглушаются свечные отводы в местах присоединения и закрываются краны 10, И, 3, 4, при этом постоянно закрыты краны 6, 7, 8, 9, 12, 13, 22, 21. На третьем этапе открывают кран 17, стравливают этан между кранами 17 и 18 и через камеру запуска (приема) 26 заводят в трубное пространство этанопровода диагностический снаряд с последующей продувкой воздуха, попавшего в камеру запуска (приема) и выравниванием давления в камере запуска (приема) с давлением в этанопроводе, для этого на четвертом этапе закрывают кран 17 и открывают краны 20, 16, 19 для выравнивания давления между кранами 17 и 18 и давление после крана 18, на пятом этапе закрывают кран 19 и работой кранов 24 и 25 при открытых кранах 14, 13 добиваются перепада давления между кранами 17 и 18 и пространством этанопровода за краном 18 до 2-3 атм, далее мобильная ресиверная установка отбирает этан из этанопровода через открытые краны 13, 25, повышает давление этана и далее этан из мобильной ресиверной установки поступает через коммуникации при открытых кранах 24, 23, 15, 14, 16 для поднятия давления в отключенном участке на 2-3 атм, за краном 16. На шестом этапе в конце обследуемого участка открывают кран для обеспечения стравливания этана в атмосферу и создания необходимого перепада давления. На седьмом этапе проводят открытие крана 18 при закрытом 19 и, регулируя давление за 18 краном, добиваются постоянного перепада в 5 атм, при этом за счет преодоления тормозящей силы - силы трения покоя диагностический снаряд приходит в движение (за счет возникающей в результате градиента давления), после прохождения диагностическим снарядом начального участка, равного 50 диаметрам этанопровода, давление за счет регулировки кранов 15, 23, 25, 24, сбрасывают до тех пор, пока не устоится постоянный градиент 2-3 атм. На восьмом этапе производят регулировку прохождения диагностического снаряда за счет регулировки кранов 24, 25 увеличивая или уменьшая объем этана, направляемого из этанопровода по коммуникациям через мобильную ресиверную установку, при этом осуществляется движение диагностического снаряда по диагностируемому этанопроводу, за счет воздействия этана на конструкцию диагностического снаряда, частично перекрывающую поперечное сечение этанопровода, что и позволяет перемещать диагностический снаряд с заданной равномерной скоростью.
Сглаживание импульсов давления производится за счет создания обвязкой этанопровода областей, выполняющих роль ресивера для сглаживания пульсаций и мобильной ресиверной установкой, что обеспечивает плавность регулировки режимов похождения диагностического снаряда внутри этанопровода.
Последовательность действий с закрыванием и открыванием кранов, а также стравливанием и параллельная работа мобильной ресиверной установки создают дополнительные условия для сглаживания пульсаций и обеспечивают выравнивание давления, возможность осуществления внутритрубной диагностики без привлечения дополнительных средств (технических, финансовых и пр.).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБЕСПЕЧЕНИЯ РЕЖИМА ДВИЖЕНИЯ ДИАГНОСТИЧЕСКОГО СНАРЯДА В ЭТАНОПРОВОДЕ | 2016 |
|
RU2644431C2 |
| СПОСОБ ОБЕСПЕЧЕНИЯ РЕЖИМА ДВИЖЕНИЯ ДИАГНОСТИЧЕСКОГО СНАРЯДА В ЭТАНОПРОВОДЕ | 2016 |
|
RU2644430C2 |
| СПОСОБ ВЫЯВЛЕНИЯ ДЕФЕКТОВ ТРУБ ГАЗОПРОВОДА | 2001 |
|
RU2211998C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ВНУТРИТРУБНЫМ ОБЪЕКТОМ | 2013 |
|
RU2528790C1 |
| СПОСОБ ВЗРЫВОЗАЩИТЫ АППАРАТА ВНУТРИТРУБНОГО КОНТРОЛЯ И УСТРОЙСТВО СИСТЕМЫ ВЗРЫВОЗАЩИТЫ ДЛЯ ЕГО ВЫПОЛНЕНИЯ | 2012 |
|
RU2485391C1 |
| Способ откачки газа из трубопроводной обвязки камеры запуска очистных устройств и устройство для его осуществления | 2021 |
|
RU2775332C1 |
| СПОСОБ ОТБОРА ГАЗА ПУСКОВОГО, ТОПЛИВНОГО, ИМПУЛЬСНОГО И ДЛЯ СОБСТВЕННЫХ НУЖД С ТЕХНОЛОГИЧЕСКИХ КОММУНИКАЦИЙ КОМПРЕССОРНЫХ ЦЕХОВ КОМПРЕССОРНОЙ СТАНЦИИ В КАЧЕСТВЕ ТОПЛИВНОГО ПРИ ВЫВОДЕ СМЕЖНОГО ЦЕХА В РЕМОНТ | 2016 |
|
RU2641770C2 |
| ГАЗОПЕРЕКАЧИВАЮЩИЙ АГРЕГАТ И СПОСОБ ЕГО ЗАПУСКА | 2014 |
|
RU2607113C2 |
| Способ откачки газа из отключенного участка газопровода и мобильная установка для осуществления этого способа | 2017 |
|
RU2661227C2 |
| Система управления процессом запуска внутритрубного устройства | 2022 |
|
RU2791800C1 |
Изобретение относится к области эксплуатации систем газоснабжения, в частности к организации и проведению неразрушающего контроля, и может быть использовано для создания оптимальных режимов движения дефектоскопов этанопроводов при внутритрубной диагностике. Технической задачей предлагаемого способа обеспечения режима движения диагностического снаряда в этанопроводе является создание способа организации режима движения диагностических снарядов с регулированием скоростей движения при проведении внутритрубной дефектоскопии (диагностики) этанопровода в зависимости от условий прокладки этанопровода при отсутствии параллельной нитки газопровода с использованием имеющихся коммуникаций, запорной арматуры и мобильной ресиверной установки. Поставленная техническая задача в способе обеспечения режима движения диагностического снаряда в этанопроводе, включающем перемещение диагностического снаряда с заданной равномерной скоростью, введение диагностического снаряда в камеру запуска (приема), замену воздуха в камере запуска (приема) с выравниванием давления в камере запуска (приема), выдвижение диагностического снаряда из камеры запуска (приема), воздействие на конструкцию диагностического снаряда, частично перекрывающую поперечное сечение, перемещение диагностического снаряда усилием, создаваемым перепадом давления, достигается тем, что способ осуществляется по следующим этапам: на первом этапе при закрытых кранах врезки 14 и 13 проводится монтаж коммуникаций между этанопроводом и мобильной ресиверной установкой, подключаемой через обратные клапаны 25 и 24, и через свечные отводы, с установкой регулирующей запорной арматуры 15 и 23, на втором этапе заглушаются свечные отводы в местах присоединения и закрываются краны 10, 11, 3, 4, при этом постоянно закрыты краны 6, 7, 8, 9, 12, 13, 22, 21, на третьем этапе открывают кран 17, стравливают этан между кранами 17 и 18 и через камеру запуска (приема) 26 заводят в трубное пространство этанопровода диагностический снаряд, на четвертом этапе закрывают кран 17 и открывают краны 20, 16, 19 для выравнивания давления между кранами 17 и 18 и давление после крана 18, на пятом этапе закрывают кран 19 и работой кранов 24 и 25 при открытых кранах 14, 13 добиваются перепада давления между кранами 17 и 18 и пространством этанопровода за краном 18 до 2-3 атм, далее мобильная ресиверная установка отбирает этан из этанопровода через открытые краны 13, 25, повышает давление этана и далее этан из мобильной ресиверной установки поступает через коммуникации при открытых кранах 24, 23, 15, 14, 16 для поднятия давления в отключенном участке на 2-3 атм, за краном 16, на шестом этапе в конце обследуемого участка открывают кран для обеспечения стравливания этана в атмосферу и создания необходимого перепада давления, на седьмом этапе проводят открытие крана 18 при закрытом 19 и, регулируя давление за 18 краном, добиваются постоянного перепада в 5 атм, на восьмом этапе производят регулировку прохождения диагностического снаряда за счет регулировки кранов 24, 25. Последовательность действий с закрыванием и открыванием кранов, а также стравливанием и параллельная работа мобильной ресиверной установки создают дополнительные условия для сглаживания пульсации и обеспечивают выравнивание давления, возможность осуществления внутритрубной диагностики без привлечения дополнительных средств (технических, финансовых и пр.). 1 з.п. ф-лы, 1 ил.
1. Способ обеспечения режима движения диагностического снаряда в этанопроводе, включающий перемещение диагностического снаряда с заданной равномерной скоростью, введение диагностического снаряда в камеру запуска (приема), замену воздуха в камере запуска (приема) с выравниванием давления в камере запуска (приема), выдвижение диагностического снаряда из камеры запуска (приема), воздействие на конструкцию диагностического снаряда, частично перекрывающую поперечное сечение, перемещение диагностического снаряда усилием, создаваемым перепадом давления, отличающийся тем, что способ осуществляется по следующим этапам: на первом этапе при закрытых кранах врезки 14 и 13 проводится монтаж коммуникаций между этанопроводом и мобильной ресиверной установкой, подключаемой через обратные клапаны 25 и 24, и через свечные отводы, с установкой регулирующей запорной арматуры 15 и 23, на втором этапе заглушаются свечные отводы в местах присоединения и закрываются краны 10, 11, 3, 4, при этом постоянно закрыты краны 6, 7, 8, 9, 12, 13, 22, 21, на третьем этапе открывают кран 17, стравливают этан между кранами 17 и 18 и через камеру запуска (приема) 26 заводят в трубное пространство этанопровода диагностический снаряд, на четвертом этапе закрывают кран 17 и открывают краны 20, 16, 19 для выравнивания давления между кранами 17 и 18 и давления после крана 18, на пятом этапе закрывают кран 19 и работой кранов 24 и 25 при открытых кранах 14, 13 добиваются перепада давления между кранами 17 и 18 и пространством этанопровода за краном 18 до 2-3 атм, далее мобильная ресиверная установка отбирает этан из этанопровода через открытые краны 13, 25, повышает давление этана и далее этан из мобильной ресиверной установки поступает через коммуникации при открытых кранах 24, 23, 15, 14, 16 для поднятия давления в отключенном участке на 2-3 атм, за краном 16, на шестом этапе в конце обследуемого участка открывают кран для обеспечения стравливания этана в атмосферу и создания необходимого перепада давления, на седьмом этапе проводят открытие крана 18 при закрытом 19 и, регулируя давление за 18 краном, добиваются постоянного перепада в 5 атм, на восьмом этапе производят регулировку прохождения диагностического снаряда за счет регулировки кранов 24, 25.
2. Способ обеспечения режима движения диагностического снаряда в этанопроводе по п. 1, отличающийся тем, что перемещение диагностического снаряда с заданной равномерной скоростью обеспечивается за счет использования мобильной ресиверной установки и коммуникаций этанопровода, выполняющих функции ресиверной установки для сглаживания пульсаций давления, возникающих при движении диагностического снаряда.
| Статья "Опыт ООО "Газпром трансгаз Казань" по диагностике, эксплуатации и ремонту магистрального этанопровода", автор публикации ГИМРАНОВ Р.К | |||
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
| Коридорная многокамерная вагонеточная углевыжигательная печь | 1921 |
|
SU36A1 |
| АППАРАТ ВНУТРИТРУБНОГО КОНТРОЛЯ И СПОСОБ ПЕРЕМЕЩЕНИЯ ЕГО В МАГИСТРАЛЬНОМ ГАЗОПРОВОДЕ С ЗАДАННОЙ РАВНОМЕРНОЙ СКОРОСТЬЮ | 2010 |
|
RU2451867C2 |
| Устройство для сигнализации о наличии напряжения в цепях напряжения релейной защиты и измерительных приборов на подстанциях | 1947 |
|
SU74188A1 |
| СПОСОБ ПЕРЕМЕЩЕНИЯ ВНУТРИТРУБНОГО ТРАНСПОРТНОГО СНАРЯДА В МАГИСТРАЛЬНОМ ТРУБОПРОВОДЕ С ПЛАВНО ИЗМЕНЯЮЩЕЙСЯ В ЗАДАННЫХ ПРЕДЕЛАХ СКОРОСТЬЮ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2393931C1 |
| RU 204125461 А, 10.02.2006 | |||
| Эргономическое мультифункциональное кресло | 2021 |
|
RU2771670C1 |
| JP 2013194752 A, 30.09.2013. | |||

