Изобретение относится к области железнодорожной (ЖД) автоматики на сортировочных горках, предназначено для определения состояния занятости подконтрольного путевого участка стрелочного перевода подвижным составом и основано на использовании радиолокационных датчиков (РЛД).
В настоящее время на сортировочных горках сети ЖД РФ, для защиты от перевода стрелок под вагонами в разных сочетаниях эксплуатируется достаточно большое число устройств. Среди них: рельсовая цепь, рельсовые датчики прохода колес, индуктивный шлейф, фотоэлектрические устройства и радиотехнические датчики (РТД) [1, 2]. При этом на одной стрелке могут устанавливаться сразу несколько из перечисленных устройств, что обусловлено тем, что все они имеют недостатки, которые при их индивидуальном применении в определенных условиях могут вызвать перевод стрелки под подвижным составом.
Особенностью РТД, выгодно отличающих их от иных устройств, является отсутствие механических контактов с объектом контроля и их высокое быстродействие. На их работу из-за малых расстояний разноса антенн приемника и передатчика практически не оказывают влияние пыль, дым, освещенность, метеорологические условия (дождь, град, туман, снег). Дополнительными достоинствами РТД являются простота конструкции. Поэтому разработанные еще в 80-е годы двадцатого века РТД находят повсеместной применение на сортировочных горках сети ЖД РФ и в настоящее время [3].
РТД обеспечивают пространственный контакт с обнаруживаемыми объектами ЖД транспорта посредством радиоволн. Они реализуют два основных способа обнаружения: посредством приема отраженного сигнала (канал отраженного сигнала КОС) и обнаружение в результате экранирования отцепом сигнала, излучаемого передатчиком (канал прямого сигнала КПС) (см. стр. 96-108, [1]; стр. 33-37, [2]). Известны также РТД, комбинирующие указанные способы обнаружения.
На фиг. 1 показаны варианты структурных схем РТД, используемых для обнаружения отцепов на контролируемом участке пути. В схеме на фиг. 1,а передающий модуль, включающий в себя генератор СВЧ-колебаний ГСВЧ, генератор модулирующего сигнала ГМС и передающую антенну А1, устанавливается по одну сторону контролируемого участка ЖД. Приемный модуль, состоящий из приемной антенны А2, детектора СВЧ ДСВЧ, усилителя Ус и устройства фиксации УФ, - по другую сторону участка.
При отсутствии на контролируемом участке отцепа излучаемый передатчиком сигнал попадает в приемную антенну А2, детектируется детектором СВЧ, усиливается усилителем Ус и поступает в устройство фиксации УФ, которое в приемнике реализует пороговый алгоритм распознавания сигнала. При этом вырабатывается сигнал логической единицы х1, свидетельствующий о свободности участка пути. При появлении отцепа в зоне действия РТД излучаемый передатчиком сигнал экранируется и в приемную антенну А2 сигнал не попадает, в результате этого в устройстве фиксации УФ вырабатывается сигнал логического нуля  , свидетельствующий о занятости участка пути.
, свидетельствующий о занятости участка пути.
Достоинством такой схемы построения РТД являются очевидная простота и непрерывный контроль работоспособности датчика в условиях отсутствия отцепа. Однако в условиях занятости участка пути проверка работоспособности РТД не представляется возможной.
На фиг. 1,б представлена схема построения РТД, реализующего алгоритм обнаружения отцепа по приему отраженного от него сигнала. При этом передающий и приемный модули располагаются по одну сторону контролируемого участка. При наличии отцепа в зоне действия РТД излучаемый передающей антенной А1 сигнал, отразившись от боковой стенки вагона, попадает в приемную антенну А2. В результате при превышении уровнем отраженного сигнала порогового значения в устройстве фиксации УФ формируется сигнал х2, характеризующий занятость стрелочного перевода.
При отсутствии отцепа отраженный сигнал на вход приемной антенны А2 не поступает, в результате чего на выходе устройства фиксации формируется сигнал х2, свидетельствующий о свободности участка.
Однако в реальности сигнал, поступающий в антенну А2, представляет собой совокупность сигналов, отраженных от боковой стенки вагона, подстилающей поверхности земли, рельсов и иных облучаемых вблизи предметов, которые находятся в поле излучения антенны А1, а также прямого сигнала, просачивающегося из антенны А1 передающего модуля. Результат сложения этих сигналов в процессе движения отцепа подвержен сильным флуктуациям и замираниям результирующей амплитуды. Кроме того, отраженный сигнал от боковой стенки отцепа зависит от типа вагона, его отражающих свойств. По этой причине на выходе устройстве фиксации УФ возможны пропуски в формировании сигнала  , т.е. появление ложной свободности при наличии отцепа. Дополнительным недостатком этой схемы является невозможность подтверждения работоспособности РТД при отсутствии отцепа на стрелочном переводе.
, т.е. появление ложной свободности при наличии отцепа. Дополнительным недостатком этой схемы является невозможность подтверждения работоспособности РТД при отсутствии отцепа на стрелочном переводе.
Схемы, представленные на фиг. 1,а и б, - это одноканальные варианты построения РТД. В первом случае РТД имеет канал прямого сигнала (РТД-КПС), во втором случае - канал отраженного сигнала (РТД-КОС).
На фиг. 1,в показан двухканальный вариант построения РТД, представляющий собой комбинированную схему двух одноканальных РТД. Эта схема состоит из одного передатчика и двух приемников, разнесенных в пространстве. Приемные модули с антеннами А2 и A3 устанавливаются на противоположных сторонах контролируемого участка стрелочного перевода. Причем антенна приемного модуля A3 устанавливается в непосредственной близости от передающей антенны А1. Конструктивно антенны А1 и A3 при использовании в РТД циркулятора могут быть совмещены [4-6].
В отсутствие отцепа антенна А2 принимает излучаемый сигнал по каналу прямого сигнала, а в приемную антенну A3 сигнал передатчика не поступает. Поэтому на выходах устройств фиксации УФ2 и УФ1 формируются соответственно сигналы х1 и , на основании которых решающее устройство РУ регистрирует свободность участка. При появлении отцепа экранируется сигнал канал прямого сигнала КПС, в результате он не поступает в приемную антенну А2, и вместе с этим в приемной антенне A3 канала отраженного сигнала появляется сигнал, отраженный от боковой стенки отцепа. На выходах устройств фиксации УФ2 и УФ1 формируются инверсные значения напряжений соответственно х, и х2. Занятость участка регистрируется при появлении на входе решающего устройства РУ любого из двух значений напряжений или х2.
Таким образом, в схеме РТД, показанной на фиг. 1,в, свободность контролируемого участка проверяется по наличию сигнала в антенне А2 канала прямого сигнала КПС и одновременно отсутствию его на входе приемной антенны A3 канала отраженного сигнала КОС, что позволяет более достоверно определять фактическую свободность зоны контроля. Кроме того, устройство обеспечивает непрерывный самоконтроль исправности, что соответствует принципам обеспечения безопасности на ЖД транспорте.
Двухканальный вариант построения РТД на базе двух каналов прямого сигнала КПС представлен на фиг. 1, 2. Здесь в отличие от рассмотренного выше передающий модуль с антенной А1 устанавливается по одну сторону контролируемого участка, а по другую, в зоне действия передающей антенны, -два приемных модуля с антеннами А2 и A3.
Каждый в отдельности канал прямого сигнала КПС этой схемы имеет тот же алгоритм работы, что и в варианте, приведенном на фиг. 1,а. Свободность участка регистрируется решающим устройством РУ в том случае, если на его входах присутствуют напряжения x1 и х2, характеризующие наличие сигналов
в антеннах соответственно А2 и A3. Отсутствие обоих сигналов в приемных антеннах при появлении отцепа в результате полного или частичного экранирования им излучаемого передатчиком сигнала, поступающего в любую из приемных антенн А2 или A3, приведет к формированию на выходе решающего устройства РУ сигнала занятости участка.
Как видно, добавление к одноканальному варианту РТД лишь одного приемника (см. фиг. 1,в и г) существенно повышает достоверность определения фактической свободности контролируемого участка.
Преимуществом двухканального варианта построения РТД с двумя каналами прямых сигналов (РТД-2КПС) является возможность выбора такого расположения приемных антенн А2 и A3 в зоне действия диаграммы передающей антенны А1, при котором обнаруживаются практически любые отцепы в зоне контроля, в том числе с блиннобазными вагонами.
Как и в варианте, приведенном на фиг. 1,а, такая схема построения РТД обеспечивает непрерывный контроль работоспособности датчика в условиях отсутствия отцепа. Однако в условиях занятости участка пути проверка работоспособности РТД не представляется возможной. Кроме того, при расширении зоны контроля возникает проблема из-за конечной ширины диаграммы направленности антенны А1.
Наиболее широкими функциональными возможностями характеризуется РТД, блок-схема которого представлена на фиг. 1,д. (см. стр. 97-101, рис. 3.14,г [1]). Отличительной особенностью данного обнаружителя является то, что по одну сторону контролируемого участка устанавливают одну пару антенн (А1 и A3 соответственно), а на противоположной - другую пару антенн (А2, А4) [7], причем расположение этих пар может быть параллельным друг другу или перекрестным. Такие построения РТД дают возможность контролировать состояние участка по следующим алгоритмам.
Свободность характеризуется: 1) наличием прямого сигнала в приемной антенне А2, излучаемого антенной А1, т.е. наличием единичной функции х1 на выходе устройства фиксации УФ1; 2) наличием прямого сигнала в приемной антенне A3, излучаемого передающей антенны А4, т.е. наличием единичной функции х3 на выходе устройства фиксации УФ2; 3) отсутствием отраженного сигнала в приемной антенне A3, излучаемого передающей антенной А1, т.е. наличием нулевой функции на выходе УФ2; 4) отсутствием отраженного сигнала в приемной антенне А2, излучаемого передающей антенной А4, т.е. наличие нулевой функции  на выходе УФ1. Таким образом в решающем устройстве РУ свободность контролируемого участка стрелочного перевода реализуется в виде функции
на выходе УФ1. Таким образом в решающем устройстве РУ свободность контролируемого участка стрелочного перевода реализуется в виде функции 
Занятость контролируемого участка определяется по следующему состоянию выходных функций устройств фиксации УФ1 и УФ2:
 Это означает отсутствие «прямых» сигналов в антенне
Это означает отсутствие «прямых» сигналов в антенне  и антенне A3 (
и антенне A3 ( ) и наличие отраженных сигналов в антенне А2 (х4) и в антенне A3 (х2).
) и наличие отраженных сигналов в антенне А2 (х4) и в антенне A3 (х2).
Решающим устройством РУ могут реализовываться следующие алгоритмы межканальной обработки:
1) функция  В этом случае решение о занятости контролируемого участка принимается при отсутствии единичных функций и либо при наличии отраженных сигналов х2 и х4;
В этом случае решение о занятости контролируемого участка принимается при отсутствии единичных функций и либо при наличии отраженных сигналов х2 и х4;
2) наибольшую вероятность правильного обнаружения занятости контролируемого участка дает реализация функции 
Решение о занятости контролируемого участка принимается при реализации любого из приведенных состояний: либо отсутствием прямого сигнала или , либо наличием отраженного сигнала х2 или х4. По любому из рассмотренных алгоритмов работы РТД может приниматься решение как о свободности, так и о занятости контролируемого участка. С точки зрения предупреждения опасных ситуаций предпочтительным оказывается реализация функции f(x1) для контроля свободности и функции f(x3) для определения занятости контролируемого участка.
Недостатками представленного на фиг. 1,д РТД являются его сложность и громоздкость, связанная с необходимостью его установки как в одной стороны участка пути, так и с другой, что не всегда является приемлемым на сортировочной горке из-за стесненности, а также необходимость выполнения большого объема земляных и монтажных работ при его установке.
Общим недостатком известных РТД является ограниченность области контроля, которая определяется формой диаграммы направленности антенны. Обычно сечение диаграммы направленности в горизонтальной плоскости полностью не «заполняет» контролируемую площадь стрелочного перевода. Это приводит к снижению надежности контроля участка стрелочного перевода, поскольку наличие объекта контроля в «мертвых зонах» не вызывает срабатывание устройства.
Из выполненного анализа уровня техники следует, что все рассмотренные выше способы контроля и принципы построения РТД, разработанные еще в 80-е годы прошлого столетия, реализуют простейший амплитудный (или по мощности) признак обнаружения занятости или свободности зоны контроля [1-7]. При этом обнаружение отцепа производится по уменьшению мощности сигнала на входе приемника (в результате его экранирования вагоном) ниже порогового Р1<Рпор или при превышении его над пороговым уровнем Р2>Рпор.
Другие признаки обнаружения, реализующих измерение и оценку параметров отраженных сигналов, в те годы считались сложными как в смысле реализации алгоритмов обработки сигналов, так и в аппаратном воплощении. Поэтому при разработке РТД отдавалось предпочтение более простым и дешевым принципам их построения.
В настоящее время благодаря развитию элементной базы СВЧ микроэлектроники, разработке типовых модулей приемопередающих устройств СВЧ и методов цифровой обработки сигналов указанные ограничения стали несущественными. Поэтому для реализации радиотехнической аппаратуры контроля состояния стрелочных переводов нового поколения востребованными являются такие методы формирования и обработки сигналов, которые более полно используют свойства сигналов и их возможности, обеспечивающие повышение технических и эксплуатационных характеристик вновь создаваемых средств контроля. Среди таких параметров сигналов, которые пока никак не учитывались в РТД контроля состояния стрелочных переводов, например, время задержки отраженного сигнала. Не оценивались также возможности применения в этих датчиках частотной модуляции излучения.
Наиболее полно в настоящее время учтены современные методы формирования и обработки сигналов в универсальном радиолокационном датчике (РЛД), описание которого представлено в статье [8].
Главной особенностью разработанного РЛД является применение в нем автодинного приемопередающего устройства с линейной частотной модуляцией, внутреннего детектирования в СВЧ-генераторе, цифрового управления и спектральной обработки сигналов. Это позволило получить новые качества РЛД, которые не реализуются в известных серийных РТД [3]. Применение автодинного режима с внутренним детектированием позволило упростить конструкцию СВЧ-модуля, уменьшить габариты, снизить стоимость и повысить надежность всего устройства.
Структурная схема РЛД представлена на рис. 2 работы [8]. В его состав входят: радиолокационный (уголковый) отражатель, антенна, СВЧ-генератор на диоде Ганна с варакторной перестройкой частоты, усилитель модулирующего напряжения, цифро-аналоговый преобразователь (ЦАП), датчик тока в цепи питания СВЧ-генератора, полосовой фильтр и усилитель преобразованного сигнала и цифровой сигнальный процессор (ЦСП). В состав микросхемы ЦСП входят аналогово-цифровой преобразователь (АЦП) сигналов, последовательный порт и универсальный асинхронный приемопередатчик для связи с персональным компьютером и иными внешними устройствами.
Формируемый СВЧ-генератором радиосигнал с линейной частотной модуляцией излучается антенной. Сигнал, отраженный от контролируемого объекта, или радиолокационного отражателя, попадает обратно в СВЧ-генератор и вызывает в нем автодинные изменения амплитуды колебаний и тока в цепи питания диода Ганна с разностной частотой. Последние преобразуются с помощью датчика тока в напряжение выходного сигнала и далее после фильтрации и усиления поступает на ЦСП для его временной и спектральной обработки.
В случае появления в зоне действия РЛД отражающего объекта, на выходе одного из цифровых фильтров анализатора спектра ЦСП наблюдается сигнал, амплитуда которого характеризует отражательную способность наблюдаемого объекта, а номер фильтра, в котором наблюдается этот сигнал, характеризует дистанцию до объекта. Аналогичная ситуация будет в случае наблюдения в зоне контроля двух и более объектов. В этом случае каждому из объектов будет соответствовать своя спектральная составляющая.
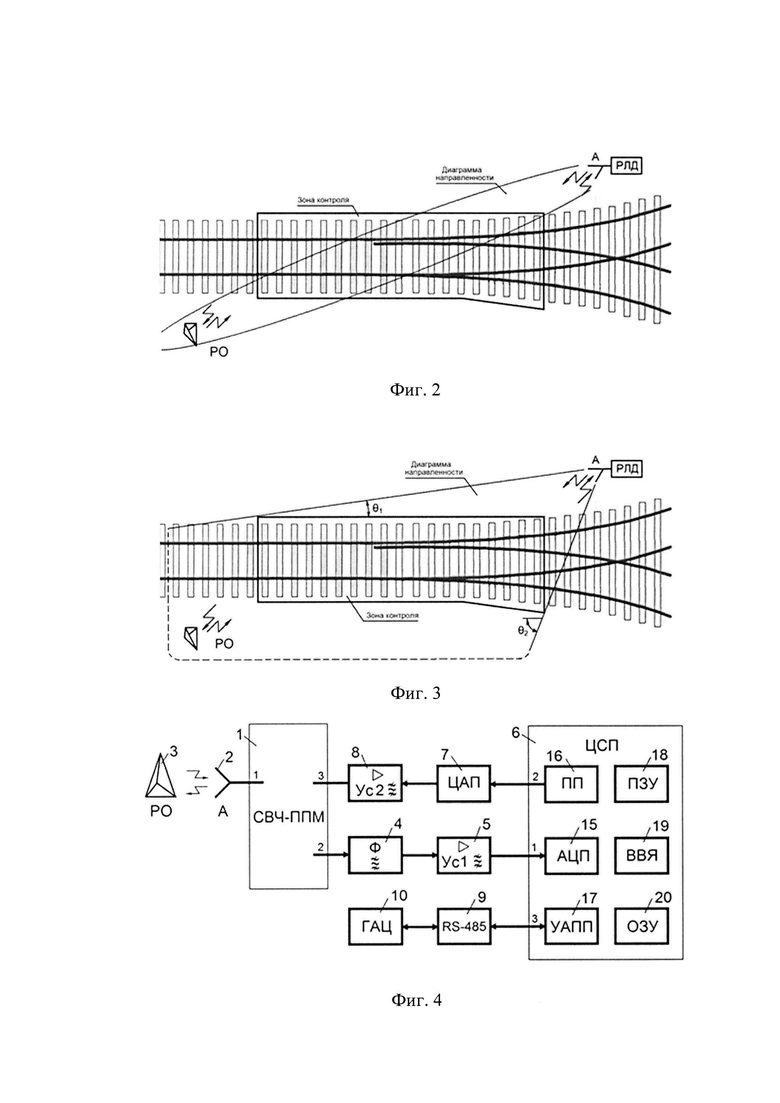
Схема расположения РЛД на стрелочном переводе показана на фиг. 2. В программе работы ЦСП заложено условное разделение пространства между датчиком и радиолокационным отражателем на три зоны: ближняя (неконтролируемая), контролируемая и дальняя. Ближняя зона условно соответствует расстоянию от раскрыва антенны А (см. фиг. 2) до ближайшей границы зоны контроля, например, до изолирующих стыков на рельсовом пути. Контролируемая зона для примера находится между ближними и дальними изолирующими стыками, а дальняя зона - за пределом контролируемой зоны. В ближней зоне РЛД для предотвращения ошибочных срабатываний, которые могут возникать в случае наличия в диаграмме направленности антенны осадков в виде дождя или мокрого снега, малоразмерных объектов (насекомых, птиц), предусмотрено исключение из рассмотрения сигналов при принятии решения о занятости пути.
В контролируемой зоне, которая соответствует площади стрелочного перевода, появление сигнала достаточного уровня интерпретируется сигнальным процессором как наличие подвижного состава, т.е. «занятость». В дальней зоне, где установлен радиолокационный отражатель, полученный сигнал используется для самотестирования датчика при отсутствии подвижного состава в зоне контроля.
В РЛД предусмотрены дистанционный контроль и диагностика параметров, передача радиолокационной и сервисной информации на диспетчерский пункт, обеспечена возможность работы в информационных сетях. Дополнительным преимуществом РЛД является его универсальность, поскольку разные задачи на сортировочной горке выполняются с помощью одного типа датчика, что значительно упрощает их стандартизацию, ремонт и обслуживание. Они имеют значительно меньшие размеры, вес и стоимость, в сравнении с ближайшими аналогами - РТД.
Из анализа состояния уровня техники следует, что наиболее близкими аналогами (прототипами) по технической сущности, принципу действия и достигаемому положительному эффекту являются способ и устройство, описанные в статье: Срмак Г.П., Варавiн А.В., Попов I.B., Васильев О.С., Усов Л.С. Радiолокацiйний датчик контролю наявностi i швидкостi рухомого складу на територiях сортувальних гiрок // Наука та iнновацii. 2009. Т. 5. №5. С. 9-16, [8].
Согласно описанию, в основе принципа действия прототипа лежит способ радиолокационного контроля состояния стрелочного перевода, заключающийся в том, что посредством антенны радиолокационного датчика (РЛД), установленного с одной стороны ЖД пути за пределом контролируемого участка стрелочного перевода, излучают и одновременно формируют на высоте вагонной автосцепки электромагнитное (ЭМ) СВЧ излучение в виде карандашной диаграммы направленности (ДН), совпадающей по направлению с диагональю контролируемого участка стрелочного перевода, принимают отраженное СВЧ излучение от объектов, находящихся в пределах диаграммы направленности антенны РЛД, преобразуют его в электрические сигналы, которые разделяют по признаку времени запаздывания отраженного излучения, сравнивают амплитуды электрических сигналов с пороговым уровнем, далее по времени запаздывания электрических сигналов, амплитуда которых превышает заданный пороговый уровень, определяют расстояние от РЛД до объекта, вызвавшего отражение излучения, при этом если полученное расстояние какого-либо электрического сигнала соответствует положению объекта внутри контролируемого участка, то принимают решение о его занятости, если расстояние получено от единственного электрического сигнала, которое соответствует положению радиолокационного отражателя, установленного заранее в пределах ДН антенны с противоположной стороны ЖД пути за дальним пределом зоны контроля, то принимают решение о свободности контролируемого участка стрелочного перевода, если электрические сигналы с превышающей пороговый уровень амплитудой отсутствуют, то принимают решение о неисправности РЛД.
Радиолокационный датчик контроля состояния стрелочного перевода прототипа в соответствие с его описанием (см. рис. 2, [8]) содержит СВЧ-генератор с возможностью электрического управления частотой и связанную с ним антенну с карандашной диаграммой направленности, в поле излучения которой находится радиолокационный отражатель, причем между блоком питания и цепью смещения СВЧ-генератора включен датчик тока, выход которого через последовательно соединенные фильтр и первый усилитель подключен к сигнальному входу аналого-цифрового преобразователя (АЦП), встроенного в цифровой сигнальный процессор (ЦСП), который через встроенный в ЦСП универсальный асинхронный приемопередатчик (УАЛЛ) связан с персональным компьютером (ПК), а через встроенный в ЦСП последовательный порт связан с входом управления частотой СВЧ-генератора через последовательное соединение цифро-аналогового преобразователя (ЦАП) и второго усилителя.
Однако у прототипа имеются следующие существенные недостатки.
Известный способ радиолокационного контроля состояния стрелочного перевода не обеспечивает полное перекрытие контролируемого участка стрелочного перевода, особенно в случаях применения сложных стрелочных переводов, например, двойных, перекрестных и криволинейных. Их боковые пути оказываются слабо защищенными. Неполное перекрытие зоны контроля создает проблемы достоверности правильного определения состояния стрелочных переводов при сопровождении отцепов, поскольку наличие объекта контроля или его отдельных частей в этих местах не вызывает срабатывание устройства.
Кроме того, антенна, выполненная с карандашной диаграммой направленности, способствует увеличению диапазона изменений уровня входного сигнала. В процессе движения отцепа по стрелочному переводу расстояние между антенной РЛД и передней стенкой вагона меняется в пределах от десятков до единиц метров. Эффективная площадь рассеяния вагонов также изменяется в широких пределах. Она зависит от типа вагона (формы, геометрических размеров, неоднородностей на его поверхности) и углов облучения в процессе их движения по контролируемому участку (см. стр. 22-25, [1]; стр. 45-49, [2]; стр. 18-20, 88-92, [9]).
Изменения указанных параметров вызывают соответствующие изменения уровня отраженного СВЧ излучения, воздействующего на автодинный приемопередатчик. При этом в случае сильного отраженного СВЧ излучения автодинным приемопередатчикам свойственны явления ангармонических искажений и периодической нестационарности уровня шума выходного сигнала [10, 11]. Данные явления являются нежелательными, поскольку при обработке такого сигнала могут возникнуть ложные отсчеты дальности, нарушающие нормальную работу РЛД.
Таким образом, техническая проблема, на решение которой направлено заявляемое изобретение, состоит в необходимости повышение(я) достоверности правильного обнаружения отцепа путем разработки способа и устройства, обеспечивающих полное перекрытие контролируемого участка ЖД пути при использовании любого типа стрелочного перевода и прохождении отцепов любой длины с любым типом вагонов.
Для решения указанной проблемы предложен способ радиолокационного контроля состояния стрелочного перевода, заключающийся в том, что посредством антенны радиолокационного датчика (РЛД), установленного с одной стороны ЖД пути за пределом зоны контроля стрелочного перевода, излучают и одновременно формируют в горизонтальной плоскости на высоте вагонной автосцепки электромагнитное (ЭМ) СВЧ излучение в виде плоской (веерной) диаграммы направленности (ДН), описываемой функцией cosec2θ в пределах углов θ1<θ<θ2, где θ1 и θ2 - углы, отсчитываемые от оси основного ЖД пути стрелочного перевода, приведенной к положению РЛД, до дальнего угла границы зоны контроля на стороне нахождения РЛД и до противолежащего угла ближней границы зоны контроля соответственно, принимают отраженное излучение СВЧ от объектов, находящихся в пределах диаграммы направленности антенны РЛД, преобразуют его в электрические сигналы и разделяют их по признаку времени запаздывания отраженного излучения, сравнивают амплитуды электрических сигналов с пороговым уровнем, далее по времени запаздывания электрических сигналов, амплитуда которых превышает заданный пороговый уровень, определяют расстояние от РЛД до объекта, вызвавшего отражение излучения, при этом если полученное расстояние какого-либо электрического сигнала соответствует положению объекта внутри контролируемого участка, то принимают решение о его занятости, если расстояние получено от единственного электрического сигнала, которое соответствует положению предварительно установленному с противоположной стороны ЖД пути за дальним пределом зоны контроля радиолокационного отражателя, то принимают решение о свободности контролируемого участка стрелочного перевода, если электрические сигналы с превышающей пороговый уровень амплитудой отсутствуют, то принимают решение о неисправности РЛД.
Для реализации указанного способа предложен радиолокационный датчик контроля состояния стрелочного перевода, содержащий СВЧ приемопередающий модуль (СВЧ-ППМ) с частотной модуляцией, первый (высокочастотный) порт которого связан с антенной, в пределах диаграммы направленности которой установлен радиолокационный отражатель, второй вывод (сигнальный) СВЧ-ППМ через последовательно соединенные фильтр и первый усилитель подключен к первому (сигнальному) порту цифрового сигнального процессора (ЦСП), второй порт которого связан с третьим выводом управления частотой СВЧ-ППМ через последовательное соединение цифро-аналогового преобразователя (ЦАП) и второго усилителя, при этом третий порт ЦСП посредством интерфейса типа RS-485 связан с системой горочной автоматической централизацией (ГАЦ), причем, антенна выполнена с плоской (веерной) диаграммой направленности, которая в горизонтальной плоскости на высоте вагонной автосцепки описывается функцией cosec2θ в пределах углов θ1<θ<θ2, где θ1 и θ2 - углы, отсчитываемые от оси основного ЖД пути стрелочного перевода, приведенной к положению РЛД, до дальнего угла границы зоны контроля на стороне нахождения РЛД и до противолежащего угла ближней границы зоны контроля соответственно.
Как следует из сравнения известных и предлагаемых способов и устройств, технический результат решения указанной проблемы достигается за счет применения антенны, формирующей в горизонтальной плоскости плоскую косеканс-квадратную диаграмму направленности антенны в виде веера, описываемой в пределах углов θ1<θ<θ2 функцией cosec2θ, где θ1 и θ2 - углы,
отсчитываемые от оси основного ЖД пути стрелочного перевода, приведенной к положению РЛД, до дальнего угла границы зоны контроля на стороне нахождения РЛД и до противолежащего угла ближней границы зоны контроля соответственно. Такая диаграмма направленности наиболее полно перекрывает площадь зоны контроля на стрелочном переводе и выравнивает уровень отраженного сигнала в зависимости от угла θ в процессе движения отцепа по контролируемому участку. Этим достигается уменьшение размера «мертвых зон», расположенных в зоне контроля и повышение достоверности правильного обнаружения занятости стрелочного перевода.
В результате поиска альтернативных решений в области применения радиолокационных устройств на ЖД транспорте среди различных источников информации факта использования антенн с косеканс-квадратной диаграммой направленности не обнаружено (см., например, литературу: стр. 120-123, [1]; стр. 33-53, [2]; стр. 20-32, [9]; авт.свидетельство СССР [4-7]). В литературе по радиолокации найдены данные о использовании антенны с косеканс-квадратной диаграммой направленности в наземных РЛС обнаружения и определения координат целей, а также в самолетных РЛС обзора земной поверхности (см. стр. 77-78, [12]; стр. 267-273, [13]).
Такая диаграмма обеспечивает постоянный уровень сигнала, отраженного от целей (самолетов), находящихся на разных наклонных дальностях, но на одинаковой высоте полета, а также в процессе сканирования одинаковую яркость изображения на индикаторе кругового обзора различных участков поверхности земли, удаленных от самолета на различные расстояния. В указанных РЛС косеканс-квадратная диаграмма направленности формируется только в вертикальной плоскости. При этом в горизонтальной плоскости диаграмма направленности обычно узкая для повышения разрешающей способности по азимуту. В современных РЛС с косеканс-квадратной диаграммой направленности ее ширина в горизонтальной плоскости составляет обычно величину порядка 1...3 градуса (см. стр. 163-170, [14]).
В предлагаемом изобретении для достижения технического результата косеканс-квадратная диаграмма направленности антенны ориентирована в горизонтальной плоскости и предназначена для наиболее полного перекрытия зоны контроля стрелочного перевода, что является существенным отличием от прототипа и позволяет сделать вывод о соответствии предлагаемого решения критерию «Новизна».
Применение антенн с косеканс-квадратной диаграммой направленности в обзорных РЛС обнаружения целей и достигаемые при этом свойства, описанные в общедоступной литературе, связаны со стабилизацией уровня отраженного сигнала с изменением дальности до цели и повышением разрешающей способности РЛС. Однако использование этой антенны с ориентацией веерной диаграммы направленности параллельно подстилающей поверхности стрелочного перевода обеспечило получение иного результата, а именно, наиболее полного перекрытия контролируемой площади для большинства типов стрелочных переводов, включая сложные, например, двойные, перекрестные и криволинейные. При этом достигается повышение достоверности и надежности контроля состояния стрелочного перевода без усложнения конструкции РЛД. Кроме того, такой тип антенны сужает динамический диапазон отраженных от поверхности вагона сигналов в процессе их перемещения по контролируемому участку стрелочного перевода, что способствует уменьшению степени искажения автодинных сигналов РЛД.
Такое решение с получением новых свойств устройства, явным образом не следующих из уровня техники, является даже неожиданным для специалиста, что соответствует критерию «Изобретательский уровень».
Изобретение направлено на улучшение характеристик работы датчиков контроля состояния стрелочных переводов, что необходимо для уменьшения потенциальных убытков от схода вагонов при неправильном определении свободности и повышения перерабатывающей способности сортировочных горок. Поэтому такой датчик востребован на сети ЖД и может выпускаться промышленностью. Таким образом, заявляемое изобретение соответствует критерию «Промышленная применимость».
Сущность изобретения поясняется чертежами.
На фиг. 1 показаны варианты структурных схем построения радиотехнических датчиков (РТД) контроля состояния стрелочного перевода аналогов: (а) - одноканальный вариант построения РТД прямого сигнала; (б) -одноканальный вариант построения РТД отраженного сигнала; (в) -двухканальный вариант построения РТД комбинации прямого и отраженного сигналов; (г) - двухканальный вариант построения РТД комбинации из двух каналов прямых сигналов; (д) - двухканальный вариант построения РТД из комбинации каналов прямого и отраженного сигналов.
На фиг. 2 показана структурная схема построения радиолокационного датчика (РЛД) контроля состояния стрелочного перевода прототипа.
На фиг. 3 представлена структурная схема, поясняющая способ, а на фиг. 4 - структурная схема РЛД, реализующего предлагаемый способ.
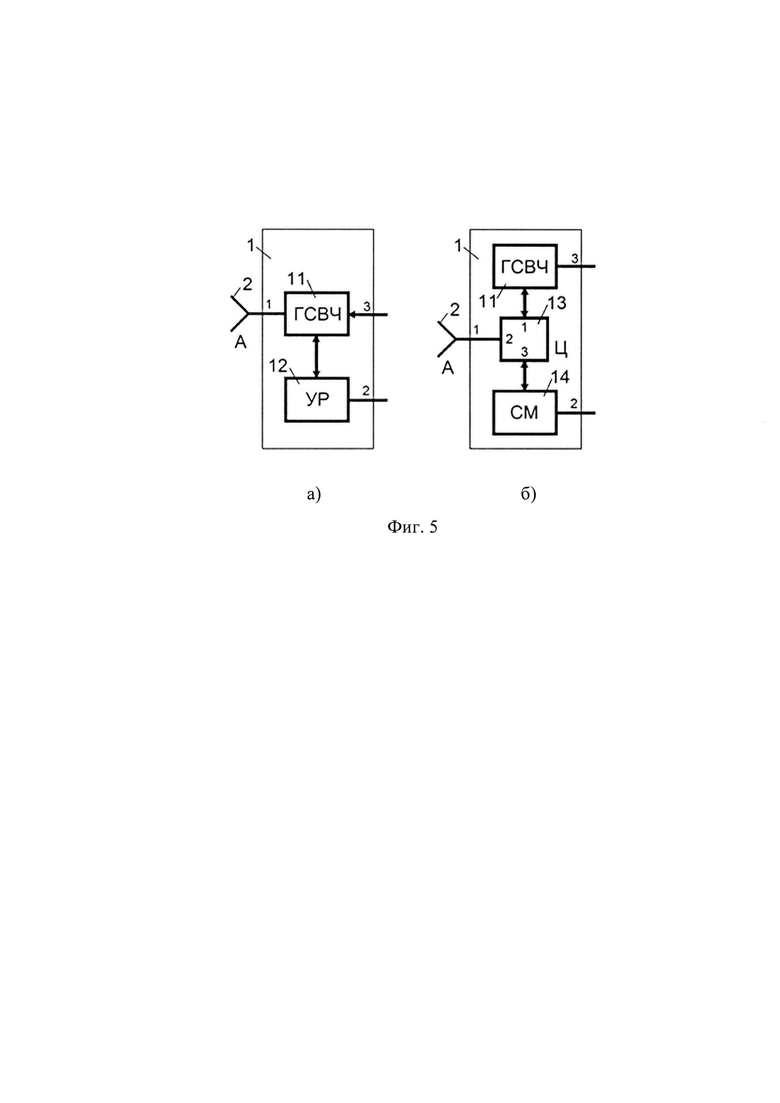
На фиг. 5 приведены автодинный (а) и гомодинный (б) варианты выполнения СВЧ приемопередающего модуля РЛД.
На структурной схеме фиг. 3 представлен стрелочный перевод с выделенной на нем зоной контроля. Со стороны боковых путей стрелочного перевода далее от зоны контроля с учетом требуемых на ЖД габаритов приближения установлен РЛД с антенной 2. По диагонали от РЛД относительно зоны контроля на противоположной стороне основного пути поодаль, с учетом требуемых на ЖД габаритов приближения, установлен радиолокационный отражатель (РО). Антенна 2 РЛД на территории стрелочного перевода ориентируется таким образом, чтобы ее косеканс-квадратная диаграмма направленности в виде плоской веерной формы в горизонтальной плоскости, описываемая функцией cosec2θ в пределах углов θ1<θ<θ2 относительно оси основного ЖД пути стрелочного перевода, приведенной к положению РЛД, касалась под углом θ, дальнего угла границы зоны контроля на стороне нахождения РЛД, а под углом θ2 - противолежащего угла ближней границы зоны контроля. При этом на схеме фиг. 3 часть диаграммы направленности, отмеченная пунктиром, показана условно. Суть предложенного способа радиолокационного контроля состояния стрелочного перевода более подробно будет рассмотрена ниже при описании работы устройства.
Радиолокационный датчик контроля состояния стрелочного перевода содержит (см. фиг. 4) СВЧ приемопередающий модуль 1 (СВЧ-ППМ) с частотной модуляцией (ЧМ), первый (высокочастотный) порт которого связан с антенной 2. В пределах диаграммы направленности (на фиг. 4 не показана) антенны с косеканс-квадратной диаграммой направленности установлен радиолокационный отражатель 3. Второй вывод (сигнальный) СВЧ-ППМ 1 через последовательно соединенные фильтр 4 и первый усилитель 5 подключен к первому (сигнальному) порту цифрового сигнального процессора 6 (ЦСП). Второй порт ЦСП 6 связан с третьим выводом управления частотой СВЧ-ППМ
I через последовательное соединение цифро-аналогового преобразователя 7 (ЦАП) и второго усилителя 8. При этом третий порт ЦСП посредством интерфейса 9 (например, типа RS-485) связан с системой горочной автоматической централизации 10 (ГАЦ).
СВЧ приемопередающий модуль 1 с ЧМ имеет альтернативные технические решения. Он может быть выполнен по автодинной (см фиг. 5,а) или гомодинной (см фиг. 5,б) схеме. Первый вариант представлен в статье [8], принятый в качестве прототипа, при этом оба варианта выполнения СВЧ-модуля описаны в патенте США US3750171, 31.07.1973 (см. фиг. 1 и 2).
При автодинном исполнении (см фиг. 5,а) функции передатчика и приемника одновременно выполняет единственный элемент - СВЧ-генератор 11I (автодин). Его высокочастотный вход-выход, являющийся первым портом СВЧ-ГГЛМ 1, связан с антенной 2 напрямую, без каких-либо развязывающих элементов. Для выделения автодинного сигнала по изменению амплитуды колебаний используется устройство 12 регистрации, которое обычно представляет собой детекторный диод, помещенный в резонатор СВЧ-генератора 11 или дополнительную детекторную секцию, подключенную к камере СВЧ-генератора 11 (см. фиг. 2 патента РФ RU 2295911 C1, опубл. 27.03.2007, бюл. №9; рис. 6а и 9а статьи [15]). При выделении автодинного сигнала в цепи питания СВЧ-генератора 11 обычно используется устройство регистрации 12, выполненное в виде датчика тока 5 (см. прототип [8]), одной из схем, представленных на рис. 14 статьи [15], или схемы с трансформаторно-емкостной связью контуров (см. рис. 74, монографии [16]). Выход устройства регистрации 12 является вторым выводом СВЧ-ППМ 1, а его третий вывод является входом управления частотой генерации.
В настоящее время промышленностью выпускается широкая номенклатура готовых к применению гомодинных СВЧ модулей (см. на сайте www.sagemillimeter.com по ссылке: «24.125 GHz, K-band FMCW radar sensor»). При гомодинном исполнении СВЧ-ППМ 1 содержит (см фиг. 5,б) отдельные узлы передатчика (СВЧ-генератора 11) и приемника (смесителя 14), связанные с антенной 2 через развязывающее устройство, например, циркулятор 13 (см. фигуры 4, 5 и 6 в описании патента КНР: CN 104898114, 09.09.2015. МПК G01S 13/58. «FSK-CW radar design and realization method» / Z.M. Yan).
СВЧ-генератор 11, может быть выполнен, например, в виде СВЧ генераторного модуля в полосковом исполнении на основе транзистора (см. фиг. 7 и 8 патента RU 2345379 С1, опубл. 27.01.2009, бюл. №3), на диоде Ганна или лавинно-пролетном диоде в волноводном или полосковом исполнении (см. стр. 194, 195, рис. 4.24 и 4.25, [17]). Для обеспечения модуляции частоты генерации в резонатор СВЧ-генератора 11 может быть помещен варикап (см. стр. 80-84, [18]).
Антенна 2 должна быть выполнена с плоской (веерной) диаграммой направленности, которая в горизонтальной плоскости на высоте вагонной автосцепки описывается функцией cosec2θ в пределах углов θ1<θ<θ2, где θ1 и θ2 - углы, отсчитываемые от оси основного ЖД пути стрелочного перевода, приведенной к положению РЛД, до дальнего угла границы зоны контроля на стороне нахождения РЛД и до противолежащего угла ближней границы зоны контроля соответственно. Антенна 2 с диаграммой такого вида может быть создана в пределах регулируемых при настройке углов θ1=3…10°,θ2=70…80° (см. стр. 382-386, [19]).
Такая антенна может быть спроектирована и изготовлена в соответствии с известными методиками, изложенными в литературе (см., например, стр. 77-78, 406^07, [12]; стр. 267-273, [13]; стр. 382-386, [19]). На сегодня известно несколько способов получения диаграммы направленности косеканс-квадратного вида, основанные на частичной расфокусировке обычного зеркала параболической антенны: 1) способ смещенных облучателей (или метод парциальных диаграмм) и 2) способ деформации профиля зеркала. В первом методе для получения косеканс-квадратной диаграммы направленности используют усеченный параболоид вращения с решеткой из нескольких точечных облучателей (см. рис. 18.21, [13]). При этом один облучатель находится в фокусе зеркала, а остальные смещены из фокуса перпендикулярно оси зеркала. Согласно второму методу профилю зеркала придают такую форму (см. рис. 18.22, [13]), при которой распределение потока мощности в секторе углов θ1<θ<θ2 будет близким к требуемому закону диаграммы направленности. Кроме того, известны способы получения косеканс-квадратной диаграммы направленности с помощью сферической или цилиндрической линзы Люнеберга, выполненной из диэлектрика с изменяющейся по толщине диэлектрической проницаемостью (см. стр. 356-362, [20]), а также посредством соответствующего возбуждения излучающих элементов фазированных антенных решеток [21].
Радиолокационный отражатель 3 может быть выполнен в виде уголкового отражателя с треугольными или квадратными гранями (см. стр. 46-48, рис. 3.3, [21]). В качестве радиолокационного отражателя может использоваться также сферическая или цилиндрическая линза Люнеберга, на противоположной стороне поверхности которой устанавливается отражающая металлическая пластинка (см. стр. 304, рис. 19.21, [13]). Особенностью радиолокационных отражателей является большая эффективная площадь рассеяния при малой зависимости ее от направления облучения. Это свойство объясняется тем, что при изменении угла падения лучей в широких пределах отражение происходит практически строго в обратном направлении.
В качестве фильтра 4, предназначенного для частичной «очистки» автодинных сигналов от сопутствующих шумов и помех в требуемом диапазоне частот, могут использоваться активные RC-фильтры нижних и верхних частот, а также полосовые фильтры, выполненные на основе операционных усилителях (см. рис. 3.3, рис. 3.7, рис. 3.10, стр. 54-62, книги [23]).
Первый усилитель 7 автодинного сигнала может быть выполнен в виде обычного инвертирующего или неинвертирующего усилителя с линейной амплитудной характеристикой в рабочем диапазоне частот и уровней сигнала на основе операционных усилителей (см., рис. 2.1, рис. 2.2, стр. 31-33, [23]).
Центральный сигнальный процессор 6 (ЦСП) выполняет одновременно функции обработки сигналов и управления частотой излучаемого радиосигнала РЛД. Он реализован на основе микросхемы сигнального процессора, например, типа TMS320F2808 фирмы Texas Instrument [24]. В состав ЦСП 6 входят блоки (см. фиг. 4), выполняющие следующие функции: подключенный к первому порту аналого-цифровой преобразователь АЦП 15, предназначенный для оцифровки входных сигналов; приемопередатчик 16 шины второго последовательного порта; универсальный асинхронный приемопередатчик шины третьего порта 17, который осуществляет обмен информацией с компьютером 10 системы ГАЦ посредством интерфейса 9 (например, RS-485); постоянное запоминающее устройство (ПЗУ) 18, хранящее программу обработки сигналов, управления и константы, необходимые для обработки сигналов; высокоскоростное вычислительное ядро 19, выполняющее все функции цифровой обработки сигнала (спектральный анализ, цифровую фильтрацию сигнала и формирование данных для формирования модулирующей функции изменения частоты РЛД и отображения информации); оперативное запоминающее устройство (ОЗУ) 20, выполняющее функции запоминания текущих значений и результатов отработки сигналов.
Цифро-аналоговый преобразователь 7 (ЦАП) предназначен для преобразования последовательности цифровых данных, поступающих со второго порта ЦСП 6, в ступенчато-пилообразно изменяющееся напряжение. Принципы построения ЦАП 7 широко известны, причем промышленностью выпускается широкая номенклатура микросхем ЦАП (см., например, [25]).
Второй усилитель 8 напряжения модуляции частоты, совмещающий функцию фильтрации и сглаживания ступенек, может быть выполнен в виде обычного инвертирующего или неинвертирующего усилителя с линейной амплитудной характеристикой в рабочем диапазоне частот и уровней сигнала на основе операционных усилителей (см., рис. 2.1, рис. 2.2, стр. 31-33, [23]).
Радиолокационный датчик контроля состояния стрелочного перевода работает следующим образом.
После подачи на РЛД напряжения от источника питания (на фиг. 4 не показан) все каскады и узлы его приходят в рабочий режим, при котором в СВЧ-генераторе 11 СВЧ-ППМ 1 (см. фиг. 5) возникают незатухающие СВЧ колебания. При этом в ЦСП 6 (см. фиг. 4) вычислительным ядром 19 в соответствие с подпрограммой «Установка» производится сначала настройка периферийных устройств, распределение внутренней памяти, установка значений внутренних переменных, копирование исполняемого кода команд из ПЗУ 18 с низкой производительностью в высокопроизводительное ОЗУ 20. После ее завершения через второй порт производится выдача на управляющий регистр ЦАП 7 последовательности цифровых кодов, которая в ЦАП 7 на своем аналоговом выходе преобразуется в линейное ступенчато возрастающее (или убывающее, не имеет значения) напряжение модуляции. Далее ступенчатое напряжение с выхода ЦАП 7 поступает на вход второго усилителя 8, где оно усиливается, а ступеньки сглаживаются благодаря конечному времени установления усилителя 8. Полученное на выходе усилителя 8 напряжение модуляции, изменяющееся по закону несимметричной пилообразной функции с периодом повторения Тмод (см. рис. 3.3(e), стр. 62, [26]), через третий вывод СВЧ-ППМ 1 подается далее на вход управления частотой СВЧ-генератора 11. Под действием этого напряжения, приложенного к варикапу, частота колебаний СВЧ-генератора И изменяется по закону несимметричной пилообразной функции.
При выполнении СВЧ-ППМ 1 на основе автодинного приемопередатчика (см. фиг. 5,а) формируемый таким образом зондирующий радиосигнал поступает в антенну 2 и в соответствие с ее диаграммой направленности излучается в пространство зоны контроля стрелочного перевода. Радиосигналы, отраженные от радиолокационного отражателя 3, вагонов, если они находятся на контролируемом участке, а также объектов верхнего строения ЖД пути (рельсов, шпал, остряков, крестовины, тяги, балласта и пр.) и иных возможных объектов, в том числе работников сортировочной горки, попадают через антенну 2 обратно в СВЧ-генератор 11 СВЧ-ППМ 1. Там эти радиосигналы смешиваются с собственными колебаниями СВЧ-генератора 11, вызывая в нем автодинные изменения амплитуды и частоты колебаний, а также среднего значения тока в цепи питания СВЧ-генератора 11. Эти изменения происходят с разностной частотой между зондирующими и отраженными колебаниями. Посредством устройства регистрации 12 производится выделение этих изменений в виде преобразованного низкочастотного сигнала. В соответствии с принципом действия автодинных радиолокаторов частота преобразованного сигнала прямо пропорциональна дальности до отражающего объекта, от которого получен отраженный сигнал (см. раздел 1.3 [27]). При этом амплитуда преобразованного сигнала характеризует отражающую способность объекта локации. Данный сигнал с выхода устройства регистрации 12 далее поступает к второму выводу СВЧ-ППМ 1.
При выполнении СВЧ-ППМ 1 на основе гомодинного приемопередатчика (см. фиг. 5,б) формируемый СВЧ-генератором 11 зондирующий радиосигнал подается на первый порт циркулятора 13. Затем этот радиосигнал, согласно известному принципу действия циркуляторов (см. стр. 290-294 книги [28]), через второй порт зондирующий радиосигнал поступает в антенну 2. Далее в соответствие с диаграммой направленности антенны 2 он излучается в пространство зоны контроля стрелочного перевода. Отраженные радиосигналы от указанных выше объектов локации через антенну 2 поступают обратно на второй порт циркулятора 13, от которого они в соответствие с принципом действия циркулятора направляются в его третий порт. Здесь отраженные радиосигналы смешиваются с частью зондирующего радиосигнала СВЧ-генератора 11, просочившегося из первого порта во второй, и поступают на вход смесителя 14. В результате взаимодействия этих радиосигналов на нелинейности преобразовательного элемента смесителя 14 на его выходе выделяется преобразованный сигнал с разностной частотой между зондирующими и отраженными колебаниями. В соответствие с принципом действия радиолокаторов с гомодинным приемопередатчиком частота преобразованного сигнала прямо пропорциональна дальности до отражающего объекта, от которого получен отраженный сигнал (см. раздел 3.2, [26]). При этом амплитуда преобразованного сигнала характеризует отражающую способность объекта локации. Данный сигнал с выхода смесителя 14 далее поступает к второму выводу СВЧ-ППМ 1.
Со второго вывода СВЧ-ППМ 1 преобразованный сигнал поступает на вход фильтра 4, где за счет каскадного соединения RC-фильтров нижних и верхних частот выполняется частичное подавление в сигнале сопутствующих шумов и помех, находящихся за пределами частотного диапазона преобразованного сигнала. При этом первый усилитель 5 усиливает сигнал по амплитуде с тем, чтобы уровень собственных помех следующего далее АЦП 15 в составе ЦСП 6 не оказывал влияния на результаты обработки сигналов. Усиленный сигнал далее поступает на первый (сигнальный) порт ЦСП 6.
При этом отметим, что в РЛД с ЧМ выходной преобразованный сигнал неизбежно сопутствуют собственные шумы СВЧ-ППМ 1 и помехи. Шумы обусловлены не идеальностью основных элементов СВЧ-ППМ 1: шумами СВЧ-генераторов 11 и смесителей 14. Обычно эти шумы носят фликкерный характер частотного распределения, т.е. возрастающий в области низких частот (ниже 10 кГц). Основной помехой обычно является сигнал, так называемой паразитной амплитудной модуляции (ПАМ). Эта ПАМ, которая неизбежно сопутствует процесс ЧМ СВЧ-генераторов, в результате детектирования на нелинейности активного элемента СВЧ-генератора 11 (при автодинном построении СВЧ-ППМ 1) или смесительного диода 14 смесителя (при гомодинном построении СВЧ-ППМ 1) проявляется в виде сигнала ПАМ. Уровень сигнала ПАМ может значительно превышать амплитуду полезного сигнала и создавать проблемы при обработке полезных сигналов (см. стр. 83-93 и главу 7, [26]).
Рассмотрим сначала работу устройства в режиме «Настройка», когда в диаграмме направленности антенны 2 на высоте вагонной автосцепки за пределом зоны контроля по дальности устанавливают радиолокационный отражатель 3 и находят оптимальное положение антенны 2, при котором наблюдается наиболее полное перекрытие зоны контроля, минимальное влияние на работу РЛД отражений от подстилающей поверхности и посторонних предметов. Настройка может выполняться как периодическая процедура с пульта управления ГАЦ 10 или автономно. При автономной калибровке РЛД отключается от сети ГАЦ 10 и подключается к персональному компьютеру.
В режиме «Настройка» на входе первого порта ЦСП 6 присутствует аддитивная смесь преобразованного сигнала, полученного как от отражателя 3, так и от объектов верхнего строения ЖД пути (рельсов, шпал, остряков, крестовины, тяги, балласта и пр.) и иных возможных объектов, если они попадают в диаграмму направленности антенны 2, а также собственных шумов СВЧ-ППМ 1 и помех ПАМ. В этом режиме АЦП 15 производит оцифровку мгновенных значений аддитивной смеси сигнала и шума с частотой выборки FB, причем частота выборки берется из выполнения сильного неравенства:  , где
, где  - частота преобразованного сигнала, соответствующая расстоянию от антенны 2 до радиолокационного отражателя 3. Полученный при этом массив исходных данных для каждого периода Тмод модуляции заполняется в память ОЗУ 20 для последующей обработки аддитивной смеси сигнала, шумов и помех.
- частота преобразованного сигнала, соответствующая расстоянию от антенны 2 до радиолокационного отражателя 3. Полученный при этом массив исходных данных для каждого периода Тмод модуляции заполняется в память ОЗУ 20 для последующей обработки аддитивной смеси сигнала, шумов и помех.
Далее вычислительным ядром 19 ЦСП 6 к исходным данным аддитивной смеси сигнала и шума применяют операции «Предварительная фильтрация сигнала», которая служит для исключения из спектра принятого сигнала компонентов, связанных с ПАМ и отражений от близлежащих объектов и помех. Для этого к исходному сигналу применяется алгоритм «Скользящее среднее», который выступает в качестве фильтра нижних частот [29]. После выделения низкочастотных составляющих этим фильтров они вычитаются из исходного сигнала, в результате чего массив исходных данных входного сигнала корректируется без учета ПАМ и помех, а вблизи антенны 2 РЛД в радиусе порядка одного метра формируется «мертвая зона». Эта мертвая зона исключает срабатывание РЛД в случае наличия вблизи антенны осадков в виде дождя или мокрого снега, малоразмерных объектов (насекомых, птиц).
После этого вычислительным ядром 19 ЦСП 6 с массивом данных для каждого периода преобразованного сигнала выполняется операция быстрого преобразования Фурье (БПФ). Данная операция на примере сигнального процессора типа TMS320F2808 реализована на основе стандартной библиотеки функций по алгоритму «Radix2» с применением оконной функции Хеннинга, оптимизированных для используемого в ЦСП 6 вычислительного ядра 19. В результате выполнения операции БПФ из массива «сглаженных» данных о сигнале в ОЗУ 20 формируется еще одна последовательность данных, отображающих картину спектра смеси преобразованного сигнала и шума. Поскольку частота гармонических спектральных составляющих прямо пропорциональна времени запаздывания отраженного излучения, то таким образом согласно п. 1 Формулы изобретения производится разделение преобразованного сигнала по признаку времени запаздывания отраженного излучения и, соответственно, расстояния между РЛД и отражающим объектом. При этом для визуального контроля процесса настройки РЛД результаты операции БПФ отображаются на мониторе компьютера в виде 2D-графика спектрального распределения «амплитуда - частота (расстояние)».
Вблизи антенны с помощью небольших отражателей в виде, например, металлических пластинок, проверяется качество формирования «мертвой зоны» и ее протяженность. Наличие гармонических составляющих за пределами «мертвой зоны», от ее границы до присутствующей в спектре сигнала гармонической составляющей от радиолокационного отражателя 3, характеризует наличие отражений сигнала от подстилающей поверхности и объектов инфраструктуры верхнего строения ЖД пути. Изменением угла ориентации антенны 2 в вертикальной плоскости добиваются ее оптимального положения, при котором уровень отражений от подстилающей поверхности наименьший, а амплитуда гармонической составляющей от радиолокационного отражателя 3 является наибольшей. При этом «пьедестал» спектра сигнала от отражателя 3 определяется среднеквадратическим уровнем собственных шумов СВЧ-ППМ 1. Данный участок спектра выбирается оператором на 2D-графике и измеренное значение среднеквадратического уровня заносится в память ОЗУ и ПЗУ как «Уровень шума» σш.
Далее вычислительным ядром 19 ЦСП 6 значение расстояния между антенной 2 и радиолокационным отражателем 3, измеренное иными средствами, например, рулеткой, делится на полученное в результате БПФ значение частоты гармонической составляющей сигнала от радиолокационного отражателя 3. Полученный результат записываются в память ОЗУ 20 и дублируется в памяти ПЗУ 18 как «Множитель расстояния» Мр. Кроме того, вычислительным ядром 19 ЦСП 6 величина амплитуды гармонической составляющей сигнала от радиолокационного отражателя 3 делится на внесенное в память ОЗУ значение «Уровень шума» σш. Полученный результат относительного уровня сигнала также записываются в память ОЗУ 20 и дублируется в памяти ПЗУ 18 как «Сигнал отражателя» qPO.
В завершение настройки РЛД производится проверка границ зоны контроля стрелочного перевода. Для этого радиолокационный отражатель 3 перемещают по территории стрелочного перевода в границах контролируемой зоны и убеждаются в наличии гармонической составляющей сигнала преобразованного сигнала. При его нахождении на дальней границе зоны контроля полученное значение частоты гармонической составляющей сигнала умножают на «Множитель расстояния» Мр. Результат этого произведения записывается в память ОЗУ 20 и ПЗУ 18 как «Дальняя граница» Ra. Аналогично проверяется с помощью отражателя ближняя граница зоны контроля. Результат этой проверки записывается в память ОЗУ 20 и ПЗУ 18 как «Ближняя граница» Rб. После завершения настройки РЛД радиолокационный отражатель 3 возвращается в штатное положение, а в память ОЗУ 20 и ПЗУ 18 после перемножения частоты сигнала от отражателя на «Множитель расстояния» Мр вносится значение «Расстояние до отражателя» RPO.
Рассмотрим теперь работу устройства в режиме «Работа». В этом режиме АЦП 15 ЦСП 6 производит оцифровку мгновенных значений аддитивной смеси сигнала, шума и помех. Полученный при этом массив исходных данных для каждого периода Тмод модуляции заполняется в память ОЗУ 20. Далее вычислительным ядром 19 ЦСП 6 к исходным данным аддитивной смеси сигнала, шума и помех применяют упомянутые выше операции «Предварительная фильтрация сигнала» и «Скользящее среднее», в результате которых из спектра принятого сигнала исключаются компоненты, связанные с ПАМ и отражений от близлежащих объектов и помех, а вблизи антенны 2 формируется «мертвая зона».
После этого вычислительным ядром 19 ЦСП 6 с массивом данных преобразованного сигнала выполняется операция быстрого преобразования Фурье (БПФ). В результате ее выполнения из массива «сглаженных» данных в ОЗУ 20 формируется еще один массив данных qi отображающих картину нормированного спектра смеси преобразованного сигнала и шума, которая получена делением всех данных амплитуды гармонических составляющих на внесенное в память ОЗУ значение «Уровень шума» σш.
Действия, связанные с обнаружением отцепа в зоне контроля и расчетом его текущего положения, выполняются следующим образом. Вычислительным ядром 19 ЦСП 6 из памяти ОЗУ 20 выбираются значения амплитуд qi гармонических составляющих. Каждое значение q(сравнивается с заданным пороговым значением qпор. Те из них, которые превышают qпор пороговое значение (qi≥qnop), умножают на «Множитель расстояния» Мр и получают новое множество значений ri{ расстояний от антенны 2 РЛД до того элемента в облучаемом пространстве, который вызвал появление парциального отражения. Далее полученное множество значений ri сравнивается с хранящимися в ОЗУ 20 значениями дальней Ra и ближней Rб границ. Если при этом сравнении на каждом периоде модуляции есть такие расстояния, которые находятся в промежутке между границами зоны контроля: Rб<ri<Rд, то при условии подтверждения этого результата, например, в 95 случаях из ста периодов модуляции, принимается окончательное решение «Занятости» стрелочного перевода. Если во множестве значений ri в пределах зоны контроля таких значений нет, то при прежнем условии подтверждения этого результата, и наличии значения ri=RPO принимается решение «Стрелка свободна». Если значения ri, включая RPO, в массиве данных отсутствуют, то при прежнем условии подтверждения принимается решение «Отказ». Данные решения в виде кодовых последовательностей команд «Занятость», «Стрелка свободна» и «Отказ» посредством интерфейса RS-485 поступают в ГАЦ 10.
Кроме отмеченных функций, РЛД в режиме «Работа» обеспечивает дополнительную функцию - самоконтроль. Во время свободности стрелочного перевода вычислительным ядром 19 ЦСП 6 производится сравнение текущих значений относительной амплитуды qPO(t) гармонической составляющей и значения текущей дальности RPO(t), полученной от радиолокационного отражателя, с их значениями, полученными в режиме «Настройка» qPO и RPO соответственно. Если эти значения отличаются от номинальных, например, на 5…10 процентов, то на ГАЦ передается предупредительная команда, например, «Проверка» о необходимости в ближайшее время проведения проверки РЛД. Указанные отличия имеют, скорее всего, не принципиальный характер и РЛД может находиться в эксплуатации до выяснения обстоятельств этих изменений. Они могут быть связаны с возможными изменениями внешних условий эксплуатации РЛД (сезонными, погодными, перестановки и перемещения напольного оборудования на территории стрелочного перевода), влияющими на условия распространения СВЧ излучения, а также временным и температурным уходом внутренних параметров СВЧ-ППМ 1.
Кроме того, антенна 1, выполненная в виде плоской (веерной) косеканс-квадратной диаграммы направленности в горизонтальной плоскости, по сравнению с карандашной диаграммой способствует сужению диапазона изменений уровня преобразованного сигнала за счет более равномерного распределения энергии зондирующего излучения по зоне контроля (см. стр. 77-78, [12]). При этом в случае применения РЛД с автодинным построением СВЧ-ППМ 1 указанное свойство антенны 2 с косеканс-квадратной диаграммой направленности способствует уменьшению ангармонических искажений выходного сигнала автодина и уровня шумов [10, 11]. Это способствует дополнительному повышению достоверности контроля стрелочного перевода при использовании автодинных РЛД.
Таким образом, предлагаемый РЛД, реализующий разработанный нами способ радиолокационного контроля состояния стрелочного перевода, при сохранении функциональных возможностей прототипа обеспечивает достижение технического результата изобретения - повышение надежности и достоверности контроля состояния стрелочного перевода благодаря постоянному самоконтролю работоспособности РЛД в процессе эксплуатации, а также наиболее полному перекрытию площади зоны контроля с помощью антенны, имеющей плоскую (веерную) диаграмму направленности в горизонтальной плоскости на высоте вагонной автосцепки, которая описывается функцией cosec2θ в пределах углов θ1<θ<θ2, где θ1 и θ2 - углы,
отсчитываемые от оси основного ЖД пути стрелочного перевода, приведенной к положению РЛД, до дальнего угла границы зоны контроля на стороне нахождения РЛД и до противолежащего угла ближней границы зоны контроля соответственно.
Дополнительными достоинствами предлагаемого РЛД является независимость их работы от типа стрелочного перевода (симметричный, несимметричный, криволинейный, двойной или перекрестный), длины отцепов и типа вагонов (обычных, длиннобазных, транспортеров, цистерн, платформ и пр.). С одной стороны, это связано с тем, что устройство обеспечивает возможность наиболее полного перекрытия зоны контроля косеканс-квадратной диаграммой направленности и, с другой стороны, обнаружение при нахождении в зоне контроля даже отдельных частей вагонов (автосцепки, тележки, лицевой или боковой стенки, хребтовая или боковые балки и пр.). Их нахождение в зоне контроля вызывает появление отраженного радиосигнала, после приема антенной 2, преобразования в СВЧ-ППМ 1 и обработки которого в ЦСП 6 получаются данные, позволяющие принять решения о занятости стрелочного перевода.
СПОСОБ РАДИОЛОКАЦИОННОГО КОНТРОЛЯ СОСТОЯНИЯ СТРЕЛОЧНОГО ПЕРЕВОДА СОРТИРОВОЧНОЙ ГОРКИ И ДАТЧИК ЕГО РЕАЛИЗУЮЩИЙ
Литература
1. Григорин-Рябов В.В., Вериго A.M., Шелухин О.И., Шелухин В.И. Радиотехнические железнодорожные устройства. -М.: Транспорт, 1986. - 161 с.
2. Шелухин В.И. Датчики измерения и контроля устройств железнодорожного транспорта. - М.: Транспорт, 1990. - 119 с.
3. Датчик радиотехнический контроля свободности стрелочных участков РТД-С. Техническое описание и инструкция по эксплуатации 38550-00-00 ТО. - М.: Лосиноостровский электротехнический завод, 1990. - 22 с.
4. Авт. свидетельство СССР SU 1008054, опубл. 30.03.1983, бюл. 12. Устройство контроля свободности стрелочных участков сортировочных горок / В.В. Григорин-Рябов, В.И. Шелухин, О.И. Шелухин, И.П. Федюкин.
5. Авт. свидетельство СССР SU 1216064, опубл. 07.03.1986, бюл. 9. Устройство контроля свободности стрелочных участков сортировочных горок / В.И. Шелухин.
6. Авт. свидетельство СССР SU 1245483, опубл. 23.07.1986, бюл. 27. Устройство контроля свободности стрелочных путевых участков сортировочных горок / В.В. Григорин-Рябов, В.И. Шелухин, О.И. Шелухин.
7. Авт. свидетельство СССР SU 839800, опубл. 23.06.1981, бюл. 23. Устройство контроля свободности стрелочных участков сортировочных горок / В.В. Григорин-Рябов, В.И. Шелухин, О.И. Шелухин.
8. Срмак Г.П., Варавiн А.В., Попов I.B., Васильев О.С., Усов Л.С. Радiолокацiйний датчик контролю наявностi i швидкостi рухомого складу на територiях сортувальних гiрок // Наука та iнновацii. 2009. Т. 5. №5. С. 9-16, (украинский). Доступ по адресу в Интернет: http://dspace.nbuv.gov.ua/xmlui/handle/123456789/27893 (прототип).
9. Марюхненко B.C. Радиолокационные системы на железнодорожном транспорте. Перспективы применения. - Иркутск: ИрГУПС, 2017.- 146 с.
10. Носков В.Я., Игнатков К.А., Чупахин А.П. Анализ сигналов от движущегося объекта автодинных локаторов с линейными видами модуляции частоты // Уральский радиотехнический журнал. 2017. Т. 1. №1. С. 25-54. DOI 10.15 826/urej.2017.1.1.002.
11. Носков В.Я., Васильев А.С., Ермак Г.П., Игнатков К.А., Чупахин А.П. Флуктуационные характеристики автодинных радиолокаторов с частотной модуляцией // Известия вузов. Радиоэлектроника. 2017. Т. 60. №3 С. 154-165. DOI: 10.20535/S0021347017030049.
12. Сколник М. Введение в технику радиолокационных систем. - М.: Мир, 1965. - 748 с.
13. Шифрин Я.С. Антенны. - Харьков: ВИРТА им. Говорова Л.А., 1976. - 408 с.
14. Карташкин А.С.Авиационные радиосистемы. - М.: ИП РадиоСофт, 2007. - 304 с.
15. Носков В.Я., Смольский С.М., Игнатков К.А. и др. Современные гибридно-интегральные автодинные генераторы микроволнового и миллиметрового диапазонов и их применение. Часть 11. Основы реализации автодинов // Успехи современной радиоэлектроники. 2019. №2. С .5-33.
16. Костылев С.А., Гончаров В.В., Соколовский И.И., Челядин А.В. Полупроводники с объемной отрицательной проводимостью в СВЧ полях: Электронные процессы и функциональные возможности. - Киев: Наук, думка, 1987. - 144 с.
17. Малышев В.А. Бортовые активные устройства сверхвысоких частот.- Л.: Судостроение, 1990, 264 с.
18. Царапкин Д.П. Генераторы СВЧ на диодах Ганна. - М.: Радио и связь, 1982, 112 с.
19. Драбкин А.Л. и др. Антенно-фидерные устройства. М.: Советское радио, 1974. - 536 с.
20. Фрадин А.З. Антенны сверхвысоких частот. - М: Советское радио, 1957. - 636 с.
21. Кизименко В.В., Юрцев О.А. Приближенная реализация диаграммы направленности типа «косеканс» в линейной антенной решетке с последовательным возбуждением // Доклады БГУИР. 2012. №6 (68). С. 88-94.
22. Радиолокационные устройства (теория и принципы построения) / Под ред. В.В. Григорина-Рябова. - М.: Сов. радио, 1970, 680 с.
23. Щербаков В.И., Грездов Г.И. Электронные схемы на операционных усилителях: Справочник. - К.: Техника, 1983. - 213 с.
24. Руководство пользователя: Семейство микроконтроллеров MSP430X1XX / Пер. с англ. М.: ЗАО «Компэл», 2004.
25. Лебедев О.Н., Марцинкявичюс А.-Й.К., Багданскис Э.-А.К. и др. Микросхемы памяти, ЦАП и АЦП: Справочник. - М.: КУбК-а, 1996. - 384 с.
26. Комаров И.В., Смольский С.М. Основы теории радиолокационных систем с непрерывным излучением частотно-модулированных колебаний. - М.: Горячая линия-Телеком, 2010. - 392 с.
27. Воторопин С.Д., Носков В.Я., Смольский С.М. Современные гибридно-интегральные автодинные генераторы микроволнового и миллиметрового диапазонов и их применение. Часть 5. Исследования автодинов с частотной модуляцией // Успехи современной радиоэлектроники. 2009. №3. С. 3-50.
28. Лебедев И.В. Техника и приборы СВЧ. Том. 1. - М.: Высшая школа, 1970. - 439 с.
29. Hussain, Z.M., Sadik, A.Z., O'Shea, P. Digital Signal Processing: An Introduction with MATLAB and Applications. Springer, 2011, 350 p.ISBN: 3642155901.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО РАДИОЛОКАЦИОННОГО ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ОТЦЕПОВ НА СОРТИРОВОЧНОЙ ГОРКЕ | 2023 |
|
RU2805901C1 |
| СПОСОБ ФИКСАЦИИ МОМЕНТА ОТДЕЛЕНИЯ ОТЦЕПА ОТ СОСТАВА И РАДИОЛОКАЦИОННЫЙ ДАТЧИК ЕГО РЕАЛИЗУЮЩИЙ (ВАРИАНТЫ) | 2023 |
|
RU2815559C1 |
| РАДИОФОТОННАЯ СИСТЕМА ЛОКАЦИОННОГО ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ОТЦЕПОВ НА СОРТИРОВОЧНОЙ ГОРКЕ | 2023 |
|
RU2838248C1 |
| РАДИОФОТОННАЯ СИСТЕМА ЛОКАЦИИ ДЛЯ ОПРЕДЕЛЕНИЯ СКОРОСТИ ОТЦЕПОВ НА СОРТИРОВОЧНОЙ ГОРКЕ | 2023 |
|
RU2812744C1 |
| РАДИОФОТОННАЯ СИСТЕМА ЛОКАЦИИ ДЛЯ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ОТЦЕПОВ НА СОРТИРОВОЧНОЙ ГОРКЕ | 2023 |
|
RU2835234C1 |
| РАДИОФОТОННАЯ СИСТЕМА ОПРЕДЕЛЕНИЯ СКОРОСТИ ОТЦЕПОВ НА СОРТИРОВОЧНОЙ ГОРКЕ | 2023 |
|
RU2834080C1 |
| СПОСОБ ОБРАБОТКИ РАДИОЛОКАЦИОННЫХ СИГНАЛОВ ДЛЯ ОБНАРУЖЕНИЯ ЦЕЛЕЙ И ИЗМЕРЕНИЯ ИХ ПАРАМЕТРОВ ДВИЖЕНИЯ В ЗОНЕ СЕЛЕКЦИИ И РАДИОЛОКАЦИОННЫЙ ДАТЧИК ЕГО РЕАЛИЗУЮЩИЙ | 2021 |
|
RU2783402C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ОБЪЕКТОВ ЛОКАЦИИ В РАДИОЛОКАЦИОННЫХ ДАТЧИКАХ С ЧАСТОТНОЙ МАНИПУЛЯЦИЕЙ НЕПРЕРЫВНОГО ИЗЛУЧЕНИЯ РАДИОВОЛН И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2018 |
|
RU2695799C1 |
| АВТОДИННЫЙ ФОТОДЕТЕКТОРНЫЙ ПРИЕМОПЕРЕДАТЧИК ДЛЯ СИСТЕМ БЛИЖНЕЙ РАДИОЛОКАЦИИ | 2023 |
|
RU2824039C1 |
| РАДИОЛОКАЦИОННЫЙ МОДУЛЬ И ИЗВЕЩАТЕЛИ ОХРАНЫ НА ЕГО ОСНОВЕ | 2009 |
|
RU2406154C1 |

Техническое решение относится к средствам определения состояния занятости подконтрольного путевого участка стрелочного перевода на сортировочных горках. Датчик контроля состояния стрелочного перевода содержит СВЧ приемопередающий модуль СВЧ-ППМ с частотной модуляцией, первый высокочастотный порт которого связан с антенной, в пределах диаграммы направленности которой установлен радиолокационный отражатель, второй вывод сигнальный СВЧ-ППМ через последовательно соединенные фильтр и первый усилитель подключен к первому сигнальному порту цифрового сигнального процессора ЦСП, второй порт которого связан с третьим выводом управления частотой СВЧ-ППМ через последовательное соединение цифроаналогового преобразователя ЦАП и второго усилителя, при этом третий порт ЦСП посредством интерфейса типа RS-485 связан с системой горочной автоматической централизацией ГАЦ, причем, антенна выполнена с плоской веерной диаграммой направленности, которая в горизонтальной плоскости на высоте вагонной автосцепки описывается функцией cosec2θ в пределах углов θl<0<θ2, где θ1 и θ2 - углы, отсчитываемые от оси основного ЖД пути стрелочного перевода, приведенной к положению РЛД, до дальнего угла границы зоны контроля на стороне нахождения РЛД и до противолежащего угла ближней границы зоны контроля соответственно. Достигается повышение надежности и достоверности контроля состояния стрелочного перевода. 2 н. и 7 з.п. ф-лы, 9 ил.
1. Способ радиолокационного контроля состояния стрелочного перевода, заключающийся в том, что посредством антенны радиолокационного датчика РЛД, установленного с одной стороны железнодорожного ЖД пути за пределом зоны контроля стрелочного перевода, излучают и одновременно формируют электромагнитное СВЧ-излучение на высоте вагонной автосцепки в виде диаграммы направленности, в пределах которой с противоположной стороны ЖД пути за дальним пределом зоны контроля устанавливают радиолокационный отражатель, принимают отраженное излучение СВЧ от объектов, находящихся в поле СВЧ-излучения антенны, преобразуют его в электрические сигналы, разделяют электрические сигналы по признаку времени запаздывания отраженного излучения, сравнивают амплитуды электрических сигналов с пороговым уровнем, далее по времени запаздывания электрических сигналов, амплитуда которых превышает заданный пороговый уровень, определяют расстояние от РЛД до объекта, вызвавшего отражение излучения, при этом если полученное расстояние какого-либо электрического сигнала соответствует положению объекта внутри зоны контроля, то принимают решение о занятости стрелочного перевода, если расстояние получено от единственного электрического сигнала, которое соответствует положению радиолокационного отражателя, то принимают решение о свободности контролируемого участка стрелочного перевода, если электрические сигналы с превышающей пороговый уровень амплитудой отсутствуют, то принимают решение о неисправности РЛД, отличающийся тем, что СВЧ-излучение формируют в горизонтальной плоскости в виде плоской веерной диаграммы направленности, описываемой функцией cosec2θ в пределах углов θ1<θ<θ2, где θ1 и θ2 - углы, отсчитываемые от оси основного ЖД пути стрелочного перевода, приведенной к положению РЛД, до дальнего угла границы зоны контроля на стороне нахождения РЛД и до противолежащего угла ближней границы зоны контроля соответственно.
2. Способ по п. 1, отличающийся тем, что электромагнитное СВЧ-излучение РЛД излучают в виде колебаний с периодической линейной частотной модуляцией по закону несимметричной пилообразной функции.
3. Способ по любому из пп. 1 и 2, отличающийся тем, что электрические сигналы по признаку времени запаздывания отраженного излучения разделяют путем получения его спектра, у которого частота гармонических спектральных составляющих прямо пропорциональна времени запаздывания отраженного излучения и, соответственно, расстоянию между РЛД и отражающим объектом.
4. Способ по любому из пп. 1, 2 и 3, отличающийся тем, что спектр отраженного сигнала получают путем выполнения над массивом данных преобразованного сигнала операции быстрого преобразования Фурье.
5. Радиолокационный датчик РЛД контроля состояния стрелочного перевода, содержащий СВЧ приемопередающий модуль СВЧ-ППМ с частотной модуляцией, первый вывод - высокочастотный порт которого связан с антенной, в пределах диаграммы направленности которой установлен радиолокационный отражатель, второй вывод СВЧ-ППМ через последовательно соединенные фильтр и первый усилитель подключен к первому сигнальному порту цифрового сигнального процессора ЦСП, второй порт которого связан с третьим выводом управления частотой СВЧ-ППМ через последовательное соединение цифроаналогового преобразователя ЦАП и второго усилителя, а третий порт ЦСП связан с системой горочной автоматической централизацией ГАЦ, отличающийся тем, что антенна выполнена с плоской веерной диаграммой направленности, которая в горизонтальной плоскости на высоте вагонной автосцепки описывается функцией cosec2θ в пределах углов θ1≤θ≤θ2, где θ1 и θ2 - углы, отсчитываемые от оси основного ЖД пути стрелочного перевода, приведенной к положению РЛД, до дальнего угла границы зоны контроля на стороне нахождения РЛД и до противолежащего угла ближней границы зоны контроля соответственно.
6. Радиолокационный датчик по п. 5, отличающийся тем, что СВЧ-ППМ с частотной модуляцией выполнен по автодинной схеме, при этом он содержит в качестве приемопередатчика связанный с антенной СВЧ-генератор, состыкованный с устройством регистрации преобразованного сигнала.
7. Радиолокационный датчик по п. 5, отличающийся тем, что СВЧ-ППМ с частотной модуляцией выполнен по гомодинной схеме, при этом он содержит отдельные узлы передатчика и приемника, связанные с антенной через элемент развязки, например, циркулятор.
8. Радиолокационный датчик по п. 5, отличающийся тем, что антенна с плоской веерной косеканс-квадратной диаграммой направленности выполнена на основе сферической или цилиндрической линзы Люнеберга.
9. Радиолокационный датчик по п. 5, отличающийся тем, что радиолокационный отражатель выполнен на основе сферической или цилиндрической линзы Люнеберга.
| Ермак Г | |||
| П., Варавин А | |||
| В., Попов И | |||
| B., Васильев А | |||
| С., Усов Л | |||
| С | |||
| Радиолокационный датчик контроля наличия и скорости подвижного состава на территориях сортировочных горок // Наука и инновации | |||
| Колосоуборка | 1923 |
|
SU2009A1 |
| Т | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| С | |||
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
| 0 |
|
SU163371A1 | |
| Комплексная система автоматизации управления сортировочным процессом (КСАУ СП) | 2020 |
|
RU2737815C1 |
| БЛОК КОМПЛЕКСИРОВАННОЙ ЗАЩИТЫ СТРЕЛОЧНОГО ПЕРЕВОДА (БКЗС) | 2007 |
|
RU2352488C2 |
| СПОСОБ И УСТРОЙСТВО ДИАГНОСТИКИ И МОНИТОРИНГА СОСТОЯНИЯ СТРЕЛОК, ПЕРЕСЕЧЕНИЙ, СТРЕЛОЧНЫХ ПЕРЕВОДОВ ИЛИ РЕЛЬСОВЫХ СТЫКОВ | 2005 |
|
RU2349480C2 |

