Изобретение относится к области радиолокации с частотной манипуляцией непрерывного излучения (ЧМНИ) радиоволн. Способ и устройство могут использоваться в радиолокационных датчиках (РЛД), предназначенных для обнаружения движущихся объектов локации, измерения расстояния до них, а также определения скорости и направления движения.
Известный способ радиолокации с ЧМНИ радиоволн (в зарубежной литературе он также известен как FSK - акроним, обозначающий «Frequency Shift Keying») полагает последовательную передачу зондирующих радиосигналов на двух разных частотах ƒ1 и ƒ2. Отраженные от объекта локации и вернувшиеся назад в РЛД радиосигналы имеют относительно излучаемых дополнительные набеги фаз ϕ1 и ϕ2, зависящие от расстояния до объекта локации (см. стр. 218-221 в книге: Виницкий А.С. «Очерк основ радиолокации при непрерывном излучении радиоволн». М.: Сов. радио, 1961. [1]). Разность фаз ϕ=ϕ1-ϕ2 между переданными и принятыми радиосигналами для движущихся объектов локации переносится на выходе смесителя приемника на фазу доплеровских сигналов. Поэтому текущая разность фаз доплеровских сигналов, полученных на разных частотах ƒ1 и ƒ2, дает информацию о дальности до объекта локации: R=сϕ/4πΔƒ, где Δƒ=ƒ2-ƒ1 - разнос частот, с - скорость распространения радиоизлучения, причем Δƒ<<ƒ1,2. Здесь ƒ1,2 - любая из частот ƒ1 или ƒ2. При этом однозначность измерения дальности Rодн до объекта локации ограничена возможностью измерения разности фаз не более 2π и определяется выбором разноса частот Δƒ: Rодн≤с/2Δƒ. Относительная (радиальная) скорость Vp объекта локации находится по частоте FД доплеровского сигнала Vp=cFД/2ƒ1,2. По знаку разности фаз ϕ обычно определяется направление движения объекта локации.
Следует отметить, что частотная манипуляция в отличие от других видов модуляции частоты излучения радиоволн (например, синусоидального, пилообразного и др.) и обработка сигналов являются наиболее простыми в реализации. Они позволяют достаточно просто разделить в сигнале данные о разности фаз, которая является результатом эффекта Доплера, от данных о разности фаз, которая обусловлена запаздыванием отраженного излучения и связана с дальностью до объекта локации. При этом определение параметров движения цели в РЛД с ЧМНИ радиоволн при обработке сигналов выполняется на низкой (доплеровской) частоте, что является также достоинством этого способа радиолокации, поскольку для обработки этих сигналов могут использоваться невысокие по быстродействию и дешевые цифровые сигнальные процессоры. Еще одним достоинством этого вида модуляции для многих приложений является отсутствие требования к линейности модуляционной характеристики передатчика. Поэтому РЛД с ЧМНИ радиоволн благодаря отмеченным достоинствам находят широкое применение для решения различных задач. Например, на автотранспорте в системах предупреждения столкновений (см. статью Stevens J.E., Nagy L.L. «Diplex Doppler radar for automotive obstacle detections IEEE Transactions on Vehicular Technology, vol. Vt-23, no. 2, pp. 34-44 [2]; стр. 72 статьи: Сысоева С. «Актуальные технологии и применение датчиков автомобильных систем активной безопасности. Часть 6. Радары». Компоненты и технологии. 2007. №3. С. 67-76 [3]), в охранных системах (см. патент США US 6677887 B2, 13.01.2004. МПК G01S 13/62. «Intrusion detection radar system» / R.K. Harman [4]; заявки Великобритании: GB 1554661, 24.10.1979. МПК G01S 9/42. «Dual frequency radar intruder detector» / N.I. Buckley [5]; GB 2073984, 21.10.1981. МПК G01S 13/56. «Microwave detecting circuit» / R.C. Birks [6]), в аппаратуре управления движением грузовой платформы парашютной системы (см. стр. 60-61 статьи: Носков В.Я., Варавин А.В., Васильев А.С., Ермак Г.П., Закарлюк Н.М., Игнатков К.А., Смольский С.М. «Современные гибридно-интегральные автодинные генераторы микроволнового и миллиметрового диапазонов и их применение. Часть 9. Радиолокационное применение автодинов» // Успехи современной радиоэлектроники. 2016. №3. С. 32-86 [7]) и других.
Способ радиолокации с ЧМНИ радиоволн лежит в основе реализации устройств, описанных в большом числе публикаций. Например, в одном из ранних патентов США US 3155972, 03.11.1964. НКП 343-12. «Continuous wave radar» / W.D. Boyer [8] и на стр. 262-263 статьи: Nilssen O.K. «New methods of range measuring Doppler radar». IRE Transactions on Aerospace and Navigational Electronics, 1962, vol. ANE-9, no. 4, p. 255-265 [9] предлагаются радарные системы с манипуляцией частоты, в приемопередатчике которых используется в качестве передатчика отражательный клистрон. Предусмотрены средства формирования управляющего напряжения на отражателе клистрона в виде «квадратной волны» (меандра) для получения излучения передатчика попеременно на двух частотах. Разнос между частотами определяется амплитудой меандра. При этом отмечается, что частота меандра должна быть существенно больше максимальной ожидаемой частоты доплеровского сигнала. Зондирующие и отраженные радиосигналы излучаются и принимаются антенной. Для разделения передаваемых и принимаемых радиосигналов, а также смешивания их в смесителе применяется циркулятор. Такое построение приемопередатчика обычно называется гомодинным. Отраженный от движущегося объекта локации радиосигнал вызывает на выходе смесителя гомодинного приемопередатчика формирование двух доплеровских сигналов, в виде выборок, выполненных со скоростью переключения частоты передатчика. После смесителя эти сигналы усиливаются в предварительном усилителе и затем синхронно с переключением частоты передатчика разделяются с помощью электронного коммутатора на два идентичных канала. В каждом канале сигналы в виде выборок после прохождения через фильтры нижних частот и усилители избавляются от высокочастотных составляющих частоты коммутации и формируются в виде сглаженных доплеровских сигналов. Затем эти два сигнала поступают на измеритель разности фаз, выполненный на основе RS-триггера. Этот измеритель дает показание расстояния для объекта локации, как линейную функцию разности фаз между двумя доплеровскими сигналами. При этом фазовый счетчик выполнен с возможностью определять направление движения объекта локации.
Известно также устройство с частотной манипуляцией для определения дальности до объекта локации, в котором в приемопередатчике также используется отражательный клистрон, но он выполняет в нем одновременно функции передатчика зондирующих радиосигналов и приемника отраженных от объекта локации радиосигналов. СВЧ выход клистрона непосредственно состыкован с антенной без каких-либо развязывающих элементов (см. статью: Терещенко А.Ф., Яшин В.А. «Двухчастотный доплеровский автодинный дальномер». Электронная техника. Сер. Контрольно-измерительная аппаратура, 1966, №3, с. 109-117. [10]). Такой приемопередатчик называется автодинным. Для выделения преобразованного сигнала в клистроне-автодине используется резистор, включенный последовательно в цепь резонатора (см. рис. 4 статьи [10]). Манипуляция частоты клистрона-авто дина осуществляется подачей модулирующего напряжения в виде меандра в цепь отражателя клистрона. После усиления полученного от клистрона-автодина сигнала дальнейшая его обработка выполнена также, как в описанном выше устройстве с гомодинным приемопередатчиком. Достоинством автодинного приемопередатчика по отношению к гомодинному - простота конструкции и низкая стоимость СВЧ блока радиолокационного датчика.
Недостатками радиолокационных датчиков с частотной манипуляцией, использующих отражательные клистроны и другие электровакуумные приборы в качестве передатчиков и автодинов, являются большие габариты, вес и стоимость, а также высокие значения питающих напряжений и токов, что ограничивает их применение в бортовых и дешевых радиолокационных датчиках.
Свободными от указанных недостатков являются радиолокационные датчики с частотной манипуляцией, приемопередатчики которых выполнены на основе генераторных полупроводниковых приборов, таких как диоды Ганна, лавинно-пролетные диоды (ЛПД) и транзисторы. При этом приемопередатчики известных устройств выполнены по гомодинной или автодинной схеме (см. патенты США US 3659293, 25.04.1972. МПК G01S 9/04. «Range-detecting Doppler radar» / R.R. Gupta [11]; US 3697985, 10.10.1972. НПК 343-5PD. «Rear end warning system for automobiles» / W.R. Faris [12]; US 3750171, 31.07.1973., G01S 9/24, G01S 9/46. «Diplexed multi-frequency CW Doppler radar» / W.R. Faris [13]; US 3750172, 31.07.1973., G01S 9/38, G01S 9/44. «Multifrequency CW radar with range cutoff» / C.P. Tresselt [14]; US 3766554, 16.10.1973. МПК G01S 9/24. «Range cutoff system for dual frequency CW radar» / C.P. Tresselt [15]; US 3832709, 28.08.1974., МПК G01S 9/42. «Motion detection apparatus having the ability to determine the direction of motion and range of a moving object» / C.F. Klein [16]; US 3898655, 05.08/1975., МПК G01/S9/44. «Variable range cut-off system for dual frequency CW radar» / C.P. Tresselt [17]).
Известны также устройства, в которых для разделения зондирующих и отраженных радиосигналов используется две антенны, из которых одна связана с передатчиком, а вторая - с приемником приемопередатчика (см., например, патенты США: US 4893125, 09.01.1990. МПК G01S 13/38. «Vehicle diplex Doppler near-obstacle detection system» / P.A. May [18]; США US 7079030, 18.07.2006. МПК G08B 13/18. «Microwave sensor» / M. Tsuji [19]; US 7167008, 23.06.2007. МПК G01S 13/00. «Microwave sensor for object detection basid on reflected microwaves» / M. Tsuji [20]; заявка Японии: JPH 02181686 A, 16.07.1990. МПК G01S 13/56. «Diplex Doppler type obstacle detector for vehicle» / F.A. Mei [21]; заявка ЕР: EP 0367404, 29.09.1989. МПК G01S 13/56. «Vehicle diplex Doppler near-obstacle detection apparatus)) / P.A. May [22]). При этом часть мощности передатчика подаются на смеситель приемника через направленный ответвитель. Однако применение двух антенн увеличивает габариты устройств, что создает трудности их применения в бортовых радиолокационных датчиках.
Для манипуляции частоты зондирующих радиосигналов в РЛД с ЧМНИ радиоволн обычно используются различные СВЧ генераторы, обеспечивающие электрическое управление частотой генерации. Среди них известны СВЧ генераторы, в которых частота перестраивается с помощью варикапа или YIG-сферы, кроме того, в простых и дешевых РЛД с ЧМНИ радиоволн используются также СВЧ генераторы, управляемые по цепи питания (см. фиг 1-3 патента США US 3659293, 25.04.1972. МПК G01S 9/04. «Range-detecting Doppler radar» / R.R. Gupta [11]). В последние годы промышленностью освоена широкая номенклатура доплеровских приемопередатчиков в виде готовых для применения модулей, интегрированных с антенной (см., например, «24.125 GHz, K-band FMCW radar sensor» на сайте: www.sagemillimeter.com [23]). Среди них есть модули, в которых частота передатчика стабилизирована при помощи цифрового синтезатора частоты на основе фазовой автоподстройки частоты (ФАПЧ). Для управления частотой этих синтезаторов служат микроконтроллеры, которые задают нужные значения частоты по поступающим на них командам (см. патент КНР: CN 2938141, 22.08.2007. МПК G01S 13/93. «Vehicle-mounted anti-collision radar system» / X.G. Yang [24]).
Известны также устройства, в которых наряду с частотной манипуляцией одновременно используется импульсная модуляция излучения радиоволн (см. патенты США US 3766554, 16.10.1973. МПК G01S 09/24. «Range cutoff system for dual frequency CW radar» / C.P. Tresselt [15]; US 3889261 A, 10.06.1975. МПК G01S 09/24. Range measurement pulse radar system / J. Sirven [25]; US 4697184 A, 29.09.1987. МПК G01S 13/56. «Intrusion detection radar system with amplitude and frequency carrier modulation to eliminate targets at short and long ranges» / J. Cheal [26]; US 5539410 A, 23.07.1996. МПК F42C 13/04. «Pulse Doppler proximity sensor» / J.E. Zveglich [27]; стр. 60-61 статьи: Носков В.Я., Варавин А.В., Васильев А.С., Ермак Г.П., Закарлюк Н.М., Игнатков К.А., Смольский С.М. «Современные гибридно-интегральные автодинные генераторы микроволнового и миллиметрового диапазонов и их применение. Часть 9. Радиолокационное применение автодинов» // Успехи современной радиоэлектроники. 2016. №3. С. 32-86 [7]). Применение одновременно импульсной модуляции и манипуляции частоты при незначительном усложнении устройств позволяет повысить их помехоустойчивость к воздействию пассивных помех благодаря возможности формирования «мертвых зон» по дальности (см. стр. 31-43 статьи Носков В.Я., Смольский С.М. «Современные гибридно-интегральные автодинные генераторы микроволнового и миллиметрового диапазонов и их применение. Часть 6. Исследования радиоимпульсных автодинов» // Успехи современной радиоэлектроники. 2009. №6. С. 3-51 [28]).
Известны также РЛД с ЧМНИ радиоволн, в которых обработка доплеровских сигналов частично или полностью выполняется цифровыми сигнальными процессорами (см. патенты США US 6380882, 30.04.2002. МПК G01S 13/56. «Motion detector based on the Doppler principle» / S. Hegnauer [29]; US 6677887, 13.06.2004. МПК G01S 13/62. «Intrusion detection radar system» / R.K. Harman [30]; US 6703967, 09.03.2004., G01S 13/38. «Distance measuring device» / H. Kuroda [31]; US 7791528, 07.09.2010., G01S 13/00, G01S 13/58. «Method and apparatus for radar signal processing» / D. Klotzbuecher [32]; заявка ЕР: EP 1067397, 25.01.2006. МПК G01S 13/56. «Bewegungsmelder nach dem Doppler-prinzip» / S. Hegnauer [33]; патент КНР: CN 104898114, 09.09.2015. МПК G01S 13/58. «FSK-CW radar design and realization method» / Z.M. Yan [34]). Современные цифровые сигнальные процессоры (ЦСП) в составе РЛД выполняют функции управления режимами работы входящих в устройство блоков, формирования и обработки сигналов при значительном упрощении конструкции устройств и обеспечивают гибкость изменения алгоритма обработки сигналов благодаря возможности их перепрограммирования (см. стр. 71-77, рис. 55 и 60 статьи: Носков В.Я., Варавин А.В., Васильев А.С, Ермак Г.П., Закарлюк Н.М., Игнатков К.А., Смольский С.М. «Современные гибридно-интегральные автодинные генераторы микроволнового и миллиметрового диапазонов и их применение. Часть 9. Радиолокационное применение автодинов» // Успехи современной радиоэлектроники. 2016. №3. С. 32-86 [7]). В составе ЦСП имеются блоки, которые выполняют функции: аналого-цифрового (АЦП) и цифро-аналогового (ЦАП) преобразователей, предназначенных для оцифровки сигналов и управления работой внешними аналоговими узлами; обмена информации с блоком индикации и управления или с персональным компьютером; спектрального анализа, цифровой фильтрации сигналов, формирования данных для индикации результатов и многих других (см. книгу: «Руководство пользователя: Семейство микроконтроллеров MSP430X1XX». Пер. с англ. М.: ЗАО «Компэл», 2004 [35]).
Анализ уровня техники показал, что известные способы определения параметров движения объектов локации и технические решения РЛД с ЧМНИ радиоволн имеют общий недостаток. Он состоит в том, что для нормального приема и формирования доплеровских сигналов необходимо выполнение следующих противоречивых условий. С одной стороны, для минимизации амплитудно-фазовых искажений доплеровских сигналов период модуляции Тм излучения должен быть значительно меньше минимального периода доплеровского сигнала ТД=1/FД=с/2Vpƒ1,2 по крайней мере, на порядок. С другой стороны, для нормального приема отраженного радиосигнала, его преобразования и обработки время τ=2R/с распространения радиосигнала до объекта локации и обратно должно быть меньше половины периода модуляции Тм (см. стр. 45 статьи Воторопин С.Д., Носков В.Я., Смольский С.М. «Современные гибридно-интегральные автодинные генераторы микроволнового и миллиметрового диапазонов и их применение. Часть 5. Исследования автодинов с частотной модуляцией» // Успехи современной радиоэлектроники. 2009. №3. С. 3-50 [36]). Отсюда следует, что при заданной предельной дальности R=Rmax до объекта локации и максимальной скорости  его движения период модуляции Тм должен удовлетворять следующим неравенствам:
его движения период модуляции Тм должен удовлетворять следующим неравенствам:
Из этой системы неравенств видно, что с увеличением предельной дальности Rmax и скорости , а также при переходе на более высокочастотный диапазон радиолокации, данные неравенства могут не выполняться, и нормальная работа РЛД с ЧМНИ радиоволн становится невозможной. Например, при Rmax=225 м,  и ƒ1,2=24,125 ГГц левая и правая части системы неравенств становятся равными Тм=3×10-6 секунд и с дальнейшим увеличением перечисленных параметров система неравенств не имеет решения. Это является существенным ограничением известных технических решений, особенно в свете общих тенденций освоения радиолокацией миллиметрового и субмиллиметрового диапазонов волн. Кроме того, в известных устройствах необходимо для выделения и формирования доплеровских сигналов иметь два идентичных канала, демодулятор частотной манипуляции (аналоговый коммутатор), тактовый генератор и синхронизатор, которые излишне усложняют реализацию РЛД с ЧМНИ радиоволн. Дополнительными недостатками известных устройств является также широкая полоса спектра зондирующего радиосигнала из-за высокой частоты манипуляции и его излучение в «нерабочих» условиях, когда объекта локации в поле излучения антенны нет, создавая помехи иным радиосредствам.
и ƒ1,2=24,125 ГГц левая и правая части системы неравенств становятся равными Тм=3×10-6 секунд и с дальнейшим увеличением перечисленных параметров система неравенств не имеет решения. Это является существенным ограничением известных технических решений, особенно в свете общих тенденций освоения радиолокацией миллиметрового и субмиллиметрового диапазонов волн. Кроме того, в известных устройствах необходимо для выделения и формирования доплеровских сигналов иметь два идентичных канала, демодулятор частотной манипуляции (аналоговый коммутатор), тактовый генератор и синхронизатор, которые излишне усложняют реализацию РЛД с ЧМНИ радиоволн. Дополнительными недостатками известных устройств является также широкая полоса спектра зондирующего радиосигнала из-за высокой частоты манипуляции и его излучение в «нерабочих» условиях, когда объекта локации в поле излучения антенны нет, создавая помехи иным радиосредствам.
Наиболее близким аналогом (прототипом) по технической сущности, принципу действия и достигаемому положительному эффекту является РЛД с ЧМНИ радиоволн, заявленный согласно патенту США US 3913106, 14.10.1975. МПК G01S 9/24. «Radar detection apparatus for preventing vehicular collisions)) / K. Sato [37].
РЛД с ЧМНИ радиоволн прототипа содержит доплеровский приемопередатчик с возможностью электрического управления его частотой (см. фиг. 1 описания прототипа), выполненный по гомодинной схеме с раздельными антеннами для передачи и приема радиосигналов. Выход передатчика через направленный ответвитель связан с входом смесителя, выход которого подключен к входу малошумящего усилителя. Выход последнего подключен к входу амплитудно-порогового формирователя, связанного своим выходом с входом выполненного из каскадного соединения первого и второго триггеров двоичного счетчика-делителя, связанного инвертирующими выходами триггеров с дешифратором, выполненным на логическом элементе И, причем неинвертирующий выход первого триггера подключен к управляющему входу частотой доплеровского приемопередатчика, при этом неинвертирующий выход второго триггера и выход дешифратора соответственно подключены к первому и второму входам блока измерения скорости и дальности. Амплитудно-пороговый формирователь содержит последовательное соединение компаратора, формирователя фронта и среза импульсов и одновибратора.
Способ определения параметров движения объектов локации РЛД с ЧМНИ радиоволн прототипа в соответствие с описанием принципа его действия состоит в следующем. Движущийся объект локации поочередно облучают зондирующим радиосигналом на двух частотах, принимают отраженный от движущегося объекта локации радиосигнал на этих же частотах, смешивают его с частью зондирующего радиосигнала и преобразуют в область низких частот, получая два чередующихся доплеровских сигнала в виде фрагментов мгновенных значений синусоиды. Затем доплеровский сигнал усиливают и формируют в виде импульсов, причем фронты этих импульсов совпадают с каждым моментом перехода доплеровского сигнала через нуль. Далее производят деление на два числа переходов доплеровского сигнала через нуль, дешифрируют результат деления и переключают частоту зондирующего радиосигнала с одной частоты на другую в моменты каждого перехода доплеровского сигнала через нуль. При этом дальность до объекта локации определяют по длительности временных интервалов, соответствующих скачкам фазы сигнала при переключении частоты зондирующего радиосигнала с одной частоты на другую, а относительную скорость движения объекта определяют исходя из длительности периодов доплеровского сигнала.
Анализ прототипа показал, что известный способ определения параметров движения объектов локации и техническая его реализация РЛД с ЧМНИ радиоволн имеют ряд недостатков. Основной недостаток состоит в том, что способ определения параметров движения объектов локации прототипа обеспечивает нормальное функционирование устройства только в условиях, когда время τ распространения зондирующего радиосигнала до объекта локации и обратно в виде отраженного радиосигнала пренебрежимо мало по сравнению с периодом ТД доплеровского сигнала: τ<<ТД. В этом (назовем его первом) случае импульсы на неинвертирующем выходе второго триггера (см. эпюру на фиг. 2Н описания прототипа), период которых обозначим как Тскор, служат в блоке измерений для определения скорости движения объекта локации. Согласно описанию прототипа (см. эпюру на фиг. 2А описания прототипа) длительность импульсов для первого случая равна  , здесь смысл обозначений Т1, t0 и t2 раскрыт на эпюре фиг. 2А и в описания прототипа. Их временной интервал равен периоду доплеровского сигнала
, здесь смысл обозначений Т1, t0 и t2 раскрыт на эпюре фиг. 2А и в описания прототипа. Их временной интервал равен периоду доплеровского сигнала  , а скорость объекта локации в блоке измерений вычисляется по формуле:
, а скорость объекта локации в блоке измерений вычисляется по формуле:

При этом длительность импульсов Трасст (для определения расстояния R) на выходе дешифратора (элемента И) (см. эпюру на фиг. 2J описания прототипа) соответствует временным интервалам tϕ=t1-t0, обусловленным скачкам фазы доплеровского сигнала при переключении частоты зондирующего радиосигнала с одной частоты на другую:  (см. обозначения t0 и t1 на эпюре фиг. 2 описания прототипа). По длительности
(см. обозначения t0 и t1 на эпюре фиг. 2 описания прототипа). По длительности  этих импульсов с учетом периода ТД доплеровского сигнала в блоке измерения для этого (первого) случая находится расстояние до объекта локации:
этих импульсов с учетом периода ТД доплеровского сигнала в блоке измерения для этого (первого) случая находится расстояние до объекта локации:

Однако с увеличением расстояния R до объекта локации и относительной скорости Vp его движения время распространения τ радиосигналов и период ТД=с/2ƒ1,2Vp доплеровского сигнала становятся по длительности соизмеримыми. Особенно такая ситуация характерна для РЛД ЧМНИ в диапазонах миллиметровых и субмиллиметровых волн. Например, для значений R=225 м, Vр=300 м/с и ƒ1,2=78 ГГц имеем: τ=2R/с=1,5×10-6 и ТД=6,4×10-6 секунды. В таком случае (назовем его вторым) при формировании и обработке доплеровских сигналов необходимо учитывать фактор времени распространения τ радиосигналов до объекта локации и обратно. В течение времени τ после скачка частоты на выходе смесителя формируется сигнал биений с частотой, равной разносу частот Δƒ=ƒ2-ƒ1 (см. рис. 8.17 и описание к нему на стр. 218-221 книги: Виницкий А.С. «Очерк основ радиолокации при непрерывном излучении радиоволн». М.: Сов. радио, 1961. [1]). Сигнал биений по частоте значительно выше доплеровского сигнала и он подавляется на выходе смесителя и в усилителе доплеровского сигнала, т.е. фактически его нет. Формирование доплеровского сигнала начинается после прихода отраженного радиосигнала, т.е. через время распространения г (см. рис. 8.17 и описание к нему на стр. 218-221 книги: Виницкий А.С. «Очерк основ радиолокации при непрерывном излучении радиоволн». М.: Сов. радио, 1961. [1]). Поэтому во втором случае при нахождении длительности импульса Трасст на неинвертирующем выходе второго триггера к каждому интервалу времени tϕ, соответствующему скачку фазы доплеровского сигнала при переключении частоты зондирующего радиосигнала с одной частоты на другую, в этом случае добавляется время распространения τ:  . Аналогично, при определении длительности импульсов Тскор также необходимо учитывать время распространения τ. Как видно из эпюр на фиг. 2А описания прототипа, в этом случае скачков частоты за период доплеровского сигнала насчитывается четыре. Поэтому к длительности каждого импульса Тскор на неинвертирующем выходе второго триггера прибавляется четыре интервала времени распространения т радиосигналов до объекта локации и обратно:
. Аналогично, при определении длительности импульсов Тскор также необходимо учитывать время распространения τ. Как видно из эпюр на фиг. 2А описания прототипа, в этом случае скачков частоты за период доплеровского сигнала насчитывается четыре. Поэтому к длительности каждого импульса Тскор на неинвертирующем выходе второго триггера прибавляется четыре интервала времени распространения т радиосигналов до объекта локации и обратно: 
Блок измерения устройства-прототипа в соответствие с заложенным в него алгоритмом вычислений во втором случае определяет относительную скорость движения объекта:

По длительности  этих импульсов с учетом полученных значений
этих импульсов с учетом полученных значений  в блоке измерения для второго случая находится расстояние до объекта локации:
в блоке измерения для второго случая находится расстояние до объекта локации:

Если первый случай считать истинным, то во втором случае устройство-прототип при измерениях дает следующие методические ошибки по скорости  и расстоянию ΔR=R(2) - R(1):
и расстоянию ΔR=R(2) - R(1):
 ,
,
 ,
,
где
 - относительная методическая ошибка определения скорости;
- относительная методическая ошибка определения скорости;
 - относительная методическая ошибка определения расстояния;
- относительная методическая ошибка определения расстояния;
τн=τ/ТД - нормированное относительно периода ТД доплеровского сигнала время τ распространения радиосигналов до объекта локации и назад;
tϕн=tϕн/ТД - нормированный относительно периода ТД доплеровского сигнала временной скачок доплеровского сигнала при переключении частоты зондирующего радиосигнала.
Из анализа формулы для относительной ошибки γскор следует, что с увеличением нормированного времени τн относительная методическая ошибка определения скорости быстро растет, причем в сторону занижения ее истинного значения. Например, при значении τн=0,1 получим: γскор=-0,28.
Анализ формулы для относительной ошибки γрасст показал, что эта погрешность зависит также от величины tϕн, т.е. от текущего расстояния до объекта локации. Например, при значении tϕн=0,25 методическая погрешность определения расстояния равна нулю. Однако при иных значениях tϕн погрешность определения расстояния быстро растет, причем возрастает в сторону завышения отсчета при условии tϕн<0,25 и возрастает в сторону занижения отсчета - при условии tϕн>0,25. Например, при значениях tϕн=0,1 и τн=0,1 получим: γрасст=0,43.
Таким образом, суть проблемы устройства-прототипа состоит в том, что оно может работать только при малых расстояниях и низких скоростях движения объекта локации, таких, когда выполняется условие пренебрежимо малого времени распространения радиосигналов до объекта локации и обратно по сравнению с периодом доплеровского сигнала. В случае, когда указанное пренебрежение не выполняется, известное устройство не обеспечивает удовлетворительную точность определения расстояния и скорости движения объектов локации. Это является существенным ограничением известного технического решения, особенно в миллиметровом и субмиллиметровом диапазонах радиоволн.
Частота манипуляции частоты зондирующего радиосигнала в устройстве-прототипе, как отмечалось выше, в четыре раза выше частоты доплеровского сигнала. При этом неизбежно расширение спектра радиосигнала в рабочем режиме устройства, когда в поле излучения антенны находится объект локации. Это является дополнительным недостатком устройства-прототипа, поскольку зондирующий радиосигнал может создавать помехи иным радиосредствам. Кроме того, в устройстве-прототипе не предусмотрено определение направления движения объекта локации.
Таким образом, решение указанной проблемы состоит в том, чтобы снять указанные ограничения, а именно, расширить рабочую область РЛД с ЧМНИ радиоволн по дальности и скорости в сторону их увеличения, а также снизить уровень неосновных спектральных составляющих зондирующих радиосигналов и обеспечить определение направления движения объекта локации. Это достигается тем, что в способе определения параметров движения объектов локации в РЛД с ЧМНГ радиоволн, при котором поочередно облучают движущийся объект локации зондирующим радиосигналом на двух частотах, принимают отраженный от движущегося объекта локации радиосигнал на этих же частотах, смешивают его с частью зондирующего радиосигнала, преобразуют его в область низких частот, получая два чередующихся доплеровских сигнала, которые затем усиливают и формируют в виде импульсов, причем срез этих импульсов совпадает с переходом доплеровского сигнала через нуль при одном и том же знаке производной от мгновенного значения доплеровского сигнала, производят подсчет целого числа периодов доплеровского сигнала и дешифрируют результаты подсчета, по завершении подсчета, переключают частоту зондирующего радиосигнала с одной частоты на другую в моменты перехода доплеровского сигнала через нуль при одном и том же знаке производной от мгновенного значения доплеровского сигнала, при этом дальность до объекта локации определяют по разности временных интервалов излучения зондирующего радиосигнала на одной и другой частоте, направление движения объекта локации определяют по знаку упомянутой разности временных интервалов, а относительную скорость движения объекта определяют исходя из длительности периодов доплеровского сигнала, полученных после дешифрации.
Для реализации заявленного способа разработано устройство для определения параметров движения объекта локации. Устройство содержит антенну, связанную с управляемым по частоте доплеровским приемопередатчиком, усилитель, подключенный к сигнальному выходу управляемого по частоте доплеровского приемопередатчика, и амплитудно-пороговый формирователь, подключенный к выходу усилителя, а также счетчик-делитель, совмещенный с дешифратором, блок сравнения временных интервалов и блок измерений, при этом к первому выходу амплитудно-порогового формирователя подключен счетный вход счетчика-делителя, а ко второму выходу амплитудно-порогового формирователя подключены вход сброса счетчика-делителя, первый вход блока сравнения временных интервалов и входная клемма «Обнаружение» блока измерений, причем неинвертирующий и инвертирующий выходы счетчика-делителя соответственно подключены ко второму и третьему входам блока сравнения временных интервалов, выход которого подключен к входной клемме «Дальность» блока измерений, при этом неинвертирующий выход счетчика-делителя подключен также к входу управления частотой доплеровского приемопередатчика, а выход одного из старших разрядов дешифратора - к входной клемме «Скорость» блока измерений.
Техническим результатом предложенного способа является расширение рабочей области устройства по дальности и скорости в сторону их увеличения благодаря выбору условий переключения зондирующего радиосигнала с одной частоты на другую и отсчета целого числа периодов доплеровского сигнала. Если в устройстве-прототипе переключение частоты зондирующего радиосигнала осуществляется в каждый момент перехода доплеровского сигнала через нуль, то в предлагаемом устройстве переключение выполняется только в моменты перехода мгновенных значений доплеровского сигнала через нуль при одном и том же знаке производной мгновенного значения доплеровского сигнала. Эти условия, как показано ниже при описании работы устройства, позволили определять величину скачка фазы доплеровского сигнала при переключении частоты зондирующего радиосигнала с учетом его знака (положительного или отрицательного). Учет знака скачка фазы при формировании временных интервалов вызывает соответствующее уменьшение одного временного интервала и увеличение другого временного интервала зондирования объекта локации. Операция сравнения (вычитания) временных интервалов зондирования объекта локации на одной и другой частоте радиосигнала позволила исключить зависимость результатов обработки доплеровских сигналов от времени распространения радиосигналов до объекта локации и обратно и, тем самым, снять имеющееся у прототипа ограничение.
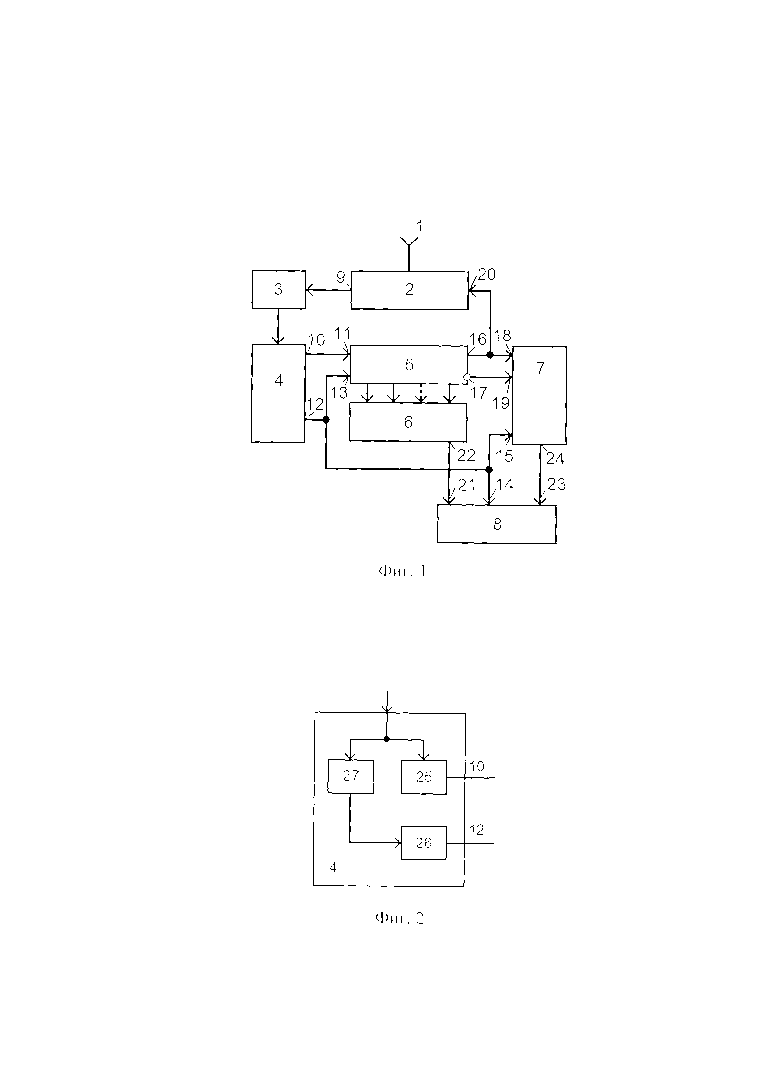
Сущность изобретения поясняется чертежами, где на фиг. 1 представлена структурная схема устройства, реализующего предложенный способ; на фиг. 2 приведена структурная схема амплитудно-порогового формирователя; на фиг. 3 и 4 приведены эпюры, поясняющие принцип действия устройства. Суть предложенного способа будет рассмотрена ниже при описании работы устройства.
Устройство содержит (см. фиг. 1) антенну 1, связанную с управляемым по частоте доплеровским приемопередатчиком 2, усилитель 3, амплитудно-пороговый формирователь 4, счетчик-делитель 5, совмещенный с дешифратором 6, блок 7 сравнения временных интервалов и блок измерений 8. При этом к сигнальному выходу 9 приемопередатчика 2 подключены последовательно соединенные усилитель 3 и амплитудно-пороговый формирователь 4, к первому выходу 10 которого подключен счетный вход 11, а ко второму выходу 12 - вход 13 сброса счетчика-делителя 5, выходы счетных триггеров которого связаны с входами дешифратора 6. Второй выход 12 амплитудно-порогового формирователя 4 подключен к клемме 14 «Обнаружение» блока измерений 8 и к первому входу 15 блока 7 сравнения временных интервалов. Неинвертирующий 16 и инвертирующий 17 выходы счетчика-делителя 5 соответственно подключены ко второму 18 и третьему 19 входам устройства 7 сравнения временных интервалов, при этом выход 16 счетчика-делителя 5 подключен также к входу 20 управления частотой приемопередатчика 2. Клемма 21 «Скорость» блока измерений 8 соединена с выходом 22 дешифратора 6, а клемма 23 «Дальность» блока измерений 8 соединена с выходом 24 устройства 7 сравнения временных интервалов.
Антенна 1 может иметь различные варианты исполнения, зависящие от требований к диаграмме направленности и рабочего диапазона частот, например, в виде щелевого вибратора, рупорной, диэлектрической стержневой, спиральной антенны или типа «волновой канал» (см. соответственно стр. 115, 149, 218, 239, 260, книги: «Антенны и устройства СВЧ. Расчет и проектирование антенных решеток и их излучающих элементов» / Под ред. Д.И. Воскресенского. - М.: Радио и связь, 1972. [38]).
Доплеровский приемопередатчик 2 с возможностью частотной манипуляции излучения имеет альтернативные технические решения. Он может быть выполнен по гомодинной или автодинной схеме (см. фигуры 4, 5 и 6 в описании прототипа; фиг. 1 и 2 в описании патента США US 3750171, 31.07.1973., G01S 9/24, G01S 9/46. «Diplexed multi-frequency CW Doppler radar» / W.R. Faris [13]; описание доплеровского модуля на сайте: «24.125 GHz, K-band FMCW radar sensor» на сайте: www.sagemillimeter.com [23]). При гомодинном исполнении приемопередатчик 2 содержит отдельные узлы передатчика и приемника, связанные с антенной 1 через развязывающее устройство, например, циркулятор (см. фигуры 4, 5 и 6 в описании патента КНР: CN 104898114, 09.09.2015. МПК G01S 13/58. «FSK-CW radar design and realization method» / Z.M. Yan [34]). При автодинном исполнении функции передатчика и приемника выполняет единственный элемент - автогенератор (см. фиг. 2 в описании патента США US 3750171, 31.07.1973., G01S 9/24, G01S 9/46. «Diplexed multi-frequency CW Doppler radar» / W.R. Faris [13]). При этом автогенератор связан с антенной 1 напрямую, без каких-либо развязывающих элементов. Для выделения доплеровского сигнала обычно к генераторной камере подключается детекторная секция (см. рис. 1 статьи Kotani M., Mitsui S., Shirahata K. «Load-variation detector characteristics of a detector-diode loaded Gunn oscillator» // Electronics and Communications in Japan. 1975. Vol. 58-B. No. 5. P. 60-66 [39]) или в цепи питания автогенератора используется одна из схем устройства регистрации сигналов, описанных в статье: Носков В.Я., Смольский С.М. «Регистрация автодинного сигнала в цепи питания генераторов на полупроводниковых диодах СВЧ. (Обзор)» // Техника и приборы СВЧ. 2009. №1. С. 14-26 [40]. При одновременной модуляции частоты зондирующего радиосигнала и выделения доплеровского сигнала в цепи питания генератора обычно используется блок модуляции-выделения сигналов, выполненный на базе операционного усилителя и транзистора (см. рис. 23, б на стр. 34 статьи: Воторопин С.Д., Носков В.Я., Смольский С.М. «Современные гибридно-интегральные автодинные генераторы микроволнового и миллиметрового диапазонов и их применение. Часть 5. Исследования автодинов с частотной модуляцией» // Успехи современной радиоэлектроники. 2009. №3. С. 3-50 [38]).
Усилитель 3 (см. фиг. 1, а) одновременно совмещает функции усиления и фильтрации сигнала в требуемой полосе доплеровских частот. Усилитель 3 может быть выполнен в виде обычного усилителя переменного сигнала и содержать элементы коррекции и формирования частотной характеристики (см., например, стр. 38-40, рис. 2.9 и 2.10. книги: Щербаков В.И., Грездов Г.И. «Электронные схемы на операционных усилителях: Справочник». К.: Техника, 1983 [41]).
Амплитудно-пороговый формирователь 4 (см. фиг. 1) может иметь различные технические решения, направленные на выделение доплеровского сигнала на фоне шумов и формирование сигнала в виде нормированных по амплитуде импульсов с привязкой их среза к переходу доплеровского сигнала через нуль при одном и том же знаке производной мгновенных значений доплеровского сигнала. Одно из возможных технических решений амплитудно-порогового устройства 4 представлено на структурной схеме фиг. 2. Амплитудно-пороговое устройство 4 содержит первый 25 и второй 26 компараторы с противошумовым гистерезисом (см. стр. 253-262, рис. 6.51 книги Херпи М. «Аналоговые интегральные схемы». М.: Радио и связь, 1983 [42]) и линейный амплитудный детектор 27 доплеровского сигнала, выполненный, например, на основе операционного усилителя (см. рис. 3.6-7 на стр. 173 книги: Ровдо А.А. «Полупроводниковые диоды и схемы с диодами». М.: Лайт ЛТД, 2000 [43]). Входы первого компаратора 25 и линейного амплитудного детектора 27 соединены вместе и образуют вход амплитудно-порогового формирователя 4, а выход первого компаратора 25 является первым выходом 10 амплитудно-порогового формирователя 4. Выход линейного амплитудного детектора 27 подключен к входу второго компаратора 26, выход которого является вторым 12 выходом амплитудно-порогового формирователя 4.
В качестве счетчика-делителя 5 предпочтительно использование микросхемы, совмещающей в одном корпусе собственно счетчик-делитель 5 и дешифратор 6 (см. рис. 2.37-2.41 на стр. 237-241 книги: Шило В.Л. «Популярные цифровые микросхемы. Справочник». М.: Металлургия, 1988 [44]). При этом выходы счетных триггеров счетчика-делителя 5 соединены с входами дешифратора 6 внутри корпуса микросхемы.
Блок 7 сравнения временных интервалов может быть выполнен на основе аналоговых или цифровых методов измерения временных интервалов. В «аналоговом» варианте исполнения это устройство может быть выполнено с применением принципа преобразования временных интервалов в напряжения (см., например, описание авт.свидетельства СССР №683006 от 30.08.1979. (Бюлл. №32). МПК H03K 5/20. «Устройство сравнения временных интервалов» / С.Я. Красюкова [45]) с последующим сравнением полученных напряжений посредством разностного усилителя (см. стр. 219-225, рис. 6.10 книги: Херпи М. «Аналоговые интегральные схемы». М.: Радио и связь, 1983 [42]). Более предпочтительным является «цифровой» вариант исполнения, в котором разница между временными интервалами просто находится с помощью цифрового измерителя временных интервалов (см. рис. 3.1 и 3.2 на стр. 63 книги: Алешечкин A.M., Мусонов В.М., Романов А.П. «Метрология и радиоизмерения». Учебное пособие. Красноярск: СибФУ, 2008 [46]), выполненным на основе реверсивного счетчика. При этом на счетный вход «Больше» реверсивного счетчика сначала подаются счетные импульсы при измерении первого временного интервала, а на счетный вход «Меньше» - при измерении второго временного интервала (см. описание на стр. 242-246 книги: Шило В. Л. «Популярные цифровые микросхемы. Справочник». М.: Металлургия, 1988 [44]). При этом вход сброса счетчика является первым входом блока 7 сравнения временных интервалов.
Блок 8 измерений может быть выполнен на основе известных аналоговых и цифровых методов измерения временных интервалов, последний более предпочтителен. Блок 8 измерений может быть выполнен с применением «жесткой логики», программируемых логических интегральных схем (ПЛИС), иных программируемых цифровых схем или микроконтроллеров. Методы измерения временных параметров сигналов и принципы построения таких измерителей изложены в технической литературе (см., например, стр. 80-119 книги: Комаров И.В., Смольский С.М. «Основы теории радиолокационных систем с непрерывным излучением частотно-модулированных колебаний». М.: Горячая линия-Телеком, 2010 [47]; стр. 280-291 книги: «Метрология и радиоизмерения» под ред. В.И. Нефедова. М.: Высшая школа, 2003 [48]; в книге: Ратхор Т.С. «Цифровые измерения. Методы и схемотехника». М.: Техносфера, 2004 [49]; в книге «Руководство пользователя: Семейство микроконтроллеров MSP430X1XX». Пер. с англ. М.: ЗАО «Компэл», 2004 [35]).
Радиолокационный датчик с ЧМНИ радиоволн работает следующим образом.
При подаче напряжения от источника питания (на фиг. 1 он не показан) в передающем устройстве доплеровского приемопередатчика 2 при его гомодинном исполнении возникают СВЧ колебания, которые в виде зондирующего радиосигнала поступают в антенну 1 и в соответствие с ее диаграммой направленности излучаются в контролируемое пространство. Часть СВЧ излучения передающего устройства одновременно воздействует на смесительный элемент приемного устройства доплеровского приемопередатчика 2. При автодинном исполнении приемопередатчика 2 функция смешения и преобразования частоты выполняется на собственной нелинейности активного элемента автогенератора-автодина.
Рассмотрим сначала работу устройства при отсутствии в поле излучения антенны 1 объекта локации. В этом случае отраженный радиосигнал, естественно, отсутствует, и на смесительный элемент воздействуют только внутренние шумы приемопередатчика 2. Эти шумы преобразуются на нелинейности смесительного элемента в область низких (доплеровских) частот и поступают через усилитель 3 на вход амплитудно-порогового формирователя 4. Пороговые уровни входящих в амплитудно-пороговый формирователь 4 компараторов 25 и 26 (см. фиг. 2) выбраны выше, чем среднеквадратический уровень шума. Поэтому на первом 10 и втором 12 выходах амплитудно-порогового формирователя 4 уровни напряжения равны нулю. При этом выходное напряжение низкого уровня со второго выхода 12 амплитудно-порогового формирователя 4, поступающее на вход 13 «Сброс» счетчика-делителя 5 и дешифратора 6, а также на первый вход 15 блока 7 сравнения временных интервалов, «удерживает» в нулевом состоянии неинвертирующий выход 16 счетчика-делителя 5 и выход 24 блока 7 сравнения временных интервалов. Кроме того, на входе 20 управления частотой приемопередатчика 2 управляющее напряжение равно логическому нулю. При этом частота излучения приемопередатчика 2 не изменяется и равна ƒ1.
Таким образом, в описанном случае, когда отраженный от объекта локации радиосигнал отсутствует, частота СВЧ излучения приемопередатчика 2 неизменна и на всех информационных входах «Обнаружение» 14, «Скорость» 21 и «Дальность» 23 блока 8 измерений данные об объекте локации отсутствуют.
Теперь рассмотрим работу устройства при наличии в поле излучения антенны 1 объекта локации. В этом случае отраженный радиосигнал в смесителе приемопередатчика 2 преобразуется в квазигармонический сигнал доплеровской частоты, который поступает на выход 9. После усиления и фильтрации в усилителе 3 этот сигнал поступает на вход амплитудно-порогового формирователя 4. Здесь он подается на входы первого компаратора 25 с противошумовым гистерезисом и линейного амплитудного детектора 27 (см. фиг. 2). Продетектированное напряжение детектором 27 далее поступает на вход второго компаратора 26 с противошумовым гистерезисом. При превышении амплитудой доплеровского сигнала пороговых уровней первого 25 и второго 26 компараторов с противошумовым гистерезисом на первом выходе 10 амплитудно-порогового формирователя 4 производится формирование нормированных по амплитуде импульсных сигналов доплеровской частоты. При этом благодаря выбору входящих в первый компаратор 25 с противошумовым гистерезисом номиналов элементов в соответствие с рекомендациями и формулами для расчета, изложенными на стр. 260 книги: Херпи М. Аналоговые интегральные схемы. М.: Радио и связь, 1983 [42], срез формируемых импульсов совпадает с моментом перехода доплеровского сигнала через нуль с одной и той же производной мгновенного значения доплеровского сигнала. На втором выходе 12 амплитудно-порогового формирователя 4 устанавливается уровень логической единицы, свидетельствующей об обнаружении объекта локации. При этом по входу 13 «Сброс» счетчик-делитель 5 получает разрешение на подсчет поступающих на счетный вход 11 импульсов с первого выхода 10 амплитудно-порогового формирователя 4, а по первому входу 15 блок 7 сравнения временных интервалов переводится в рабочий режим измерения временных интервалов.
После завершения подсчета N периодов доплеровского сигнала (здесь N - коэффициент деления счетчика-делителя 5, который может выбираться в пределах от единицы до десятков раз) на неинвертирующем выходе 16 счетчика-делителя 5 и входе 20 управления частотой приемопередатчика 2 происходит изменение состояния на «единицу» и, соответственно, переключение частоты излучения на вторую частоту ƒ2. Изменение частоты излучения приемопередатчика 2 с первой ƒ1 частоты на вторую ƒ2 вызывает (после прихода через время τ отраженного излучения) скачок фазы доплеровского сигнала на угол ϕ1-2: ϕ1-2=4π(ƒ2-ƒ1)R/с (см. формулу 8.76 в книге: Виницкий А.С. Очерк основ радиолокации при непрерывном излучении радиоволн. М.: Сов. радио, 1961 [1]). Из формулы для ϕ1-2 видно, что при выполнении условия ƒ2<ƒ1 знак скачка фазы отрицательный: ϕ1-2<0.
После завершения описанного выше цикла подсчета N переходов доплеровского сигнала через нуль на частоте ƒ2 происходит обратное изменение частоты излучения приемопередатчика 2: со второй ƒ2 частоты на первую ƒ1. При этом также после прихода через время τ отраженного от объекта локации излучения происходит скачок фазы на угол ϕ2-1: ϕ2-1=4π(ƒ1-ƒ2)R/с, который по величине равен углу ϕ1-2, но по знаку является обратным первому, т.е. ϕ2-1>0.
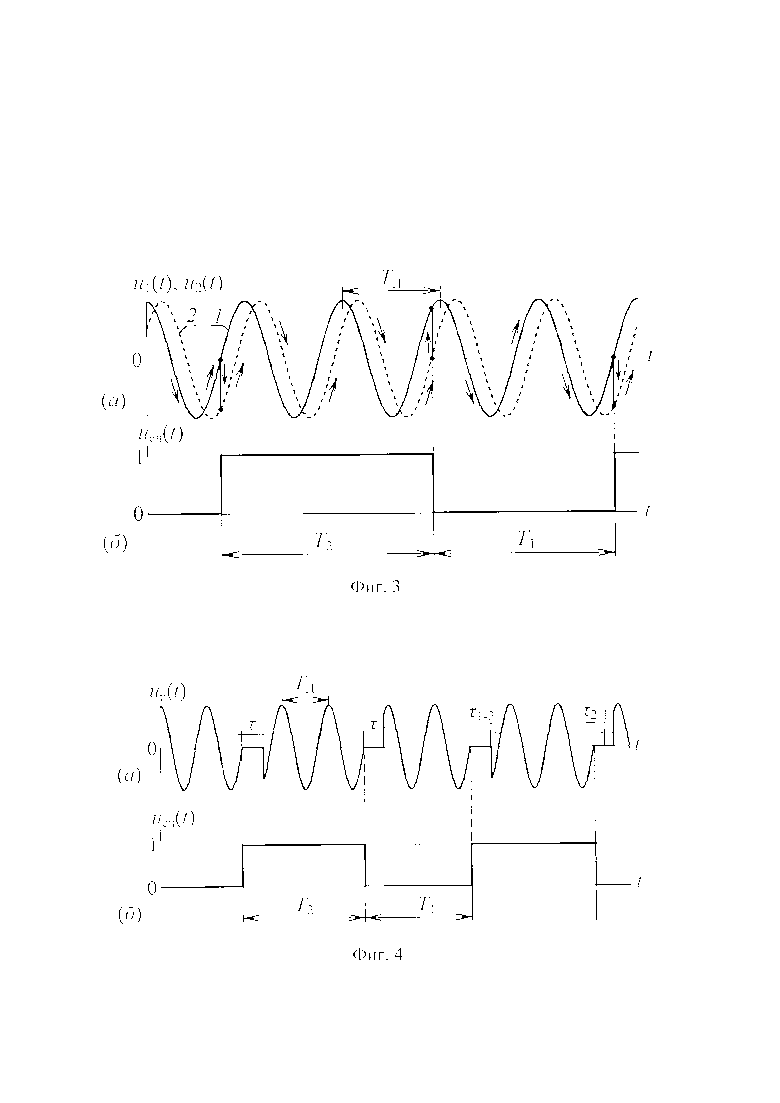
На фиг. 3, а приведены временные эпюры 1 и 2 доплеровских сигналов u1(t) и u2(t), полученных от движущегося объекта локации соответственно на частотах ƒ1 и ƒ2 излучения приемопередатчика 2 для гипотетического случая отсутствия «обратной связи по частоте», т.е. частотная манипуляция зондирующего радиосигнала отключена. На этой же фигуре для случая наличия «обратной связи по частоте» стрелками около эпюр показано перемещение по оси времени t изображающей точки мгновенного значения доплеровского сигнала. Значение коэффициента деления N счетчика-делителя 5 здесь и далее принято равным двум. На фигуре 3, б представлена эпюра выходного напряжения uсч(t) счетчика-делителя 5, показаны период ТД доплеровского сигнала, а также временные интервалы Т1 и 2Т, соответствующие временам работы устройства на первой ƒ1 и второй ƒ2 частотах приемопередатчика 2. Для наглядности здесь рассмотрен случай, когда время τ распространения излучения до объекта локации и обратно пренебрежимо мало по сравнению с периодом ТД доплеровского сигнала: τ<<ТД.
В реальной ситуации сравнительно больших дальностей и высоких значений частоты доплеровского сигнала, когда время τ распространения радиосигналов до объекта локации и обратно соизмеримо с периодом ТД доплеровского сигнала, как показано выше, необходимо учитывать время τ распространения радиосигналов до объекта локации и обратно. Для этого случая на фигуре 4, а приведены эпюры результирующего доплеровского сигнала up(t) на входе амплитудно-порогового формирователя 4 и выходного напряжения uсч(t) счетчика-делителя 5 (см. фиг. 4, б). Выносками показаны период ТД доплеровского сигнала, временные интервалы Т1 и Т2 работы устройства на первой ƒ1 и второй ƒ2 частотах соответственно. Указаны также интервалы времени τ, обусловленные распространением радиосигналов до объекта локации и обратно, и интервалы времени τ1-2 и τ2-1, вызванные скачками фазы ϕ1-2 и ϕ2-1 при переключении частоты излучения с первой частоты ƒ1 на вторую ƒ2 и обратно. Импульсы временных интервалов Т1 и Т2 при этом, как уже отмечалось, формируются на инвертирующем 17 и неинвертирующем 16 выходах счетчика-делителя 5 соответственно. Исходя из описанного выше принципа действия устройства и представленных на фигуре 4 эпюр, формулы для расчета интервалов Т1 и Т2 имеют вид: Т1=NTД+τ-tϕ, Т2=NTД+τ+tϕ. Здесь, в этих формулах учтены знаки при τ1-2 и τ2-1 и равенство их абсолютных значений: tϕ=|τ1-2|=|τ2-1|.
Импульсы временных интервалов Т1 и Т2 с выходов 16 и 17 счетчика-делителя 5 далее поступают на второй 18 и третий 19 входы блока 7 сравнения временных интервалов. В этом блоке находится разность ΔТ временных интервалов Т1 и Т2: ΔT=T2-Т1=NTД+τ+tϕ-NTД-τ+tϕ=2tϕ.
Полученное на выходе 24 блока 7 сравнения временных интервалов значение ΔТ=2tϕ позволяет при известном периоде ТД доплеровского сигнала (или его частоты) определить разность фаз ϕ и, соответственно, расстояние R до объекта локации:
R=KRΔT,
где
KR - масштабный коэффициент расстояния, который можно рассчитать по следующим формулам: KR=c/4ТДΔƒ=cFД/4Δƒ.
Из формулы для вычисления расстояния R до объекта локации видно, что выходной сигнал блока 7 сравнения временных интервалов, поступающий на выход 23 «Дальность» содержит информацию о расстоянии до объекта локации. При этом влияние времени τ распространения радиосигналов до объекта локации и обратно на результат сравнения исключается.
При изменении направления движения объекта локации знаки скачков фазы ϕ1-2 и ϕ2-1 при переключении частоты излучения с первой частоты ƒ1 на вторую ƒ2 и обратно, а также, соответственно, полярность изменения интервалов времени τ1-2 и τ2-1, вызванные скачками фазы, меняются на обратные. В связи с этим длительности временных интервалов Т1 и Т2, формируемых на инвертирующем 17 и неинвертирующем 16 выходах счетчика-делителя 5, соответственно изменяются. При этом полярность результата их сравнения ΔТ=Т2-Т1 также изменяет знак. Поэтому в блоке измерений 8 по знаку разности ΔТ временных интервалов можно определять направление относительного движения объекта локации.
На выходах 22 старших разрядов (за исключением первого) дешифратора 6 формируются импульсы, длительность которых равна периоду ТД доплеровского сигнала (см. временные диаграммы на рис. 2.38 и 2.41 книги Шило В.Л. «Популярные цифровые микросхемы. Справочник». М.: Металлургия, 1988 [44]). Используя эти импульсы при дальнейшей обработке, получаем данные о скорости движения объекта локации: Vp=с/2ТДƒ1,2.
Таким образом, предложенный способ определения параметров движения объектов локации в РЛД с ЧМНИ радиоволн и устройство для его реализации при сохранении функциональных возможностей прототипа обеспечивают работоспособность устройства в условиях больших расстояний и скоростей движения объекта локации.
Период переключения частоты зондирующего радиосигнала в предлагаемом устройстве определяется удвоенным значением количества подсчитанных периодов доплеровского сигнала счетчиком-делителем. Тогда как в устройстве-прототипе переключение частоты зондирующего радиосигнала производится за период доплеровского сигнала четыре раза. Уменьшение частоты переключений по отношению к прототипу способствует снижению уровня излучения неосновных спектральных составляющих зондирующих радиосигналов (см. стр. 245-249 книги: Денисенко А.Н. «Сигналы. Теоретическая радиотехника. Справочное пособие». М.: Горячая линия - Телеком, 2005 [50]) и, тем самым, уменьшению помех иным радиосредствам. Кроме того, предлагаемое устройство обеспечивает возможность определения направления движения объекта локации, что не предусмотрено в устройстве-прототипе. Это является дополнительным преимуществом предлагаемого устройства.
Следует отметить, что описанная выше реализация заявленного способа не является единственно возможной. Современные сигнальные процессоры, имеющие в своем составе АЦП и ЦАП, тактовые генераторы, большой объем оперативной памяти и широкий круг функциональных возможностей цифровой обработки сигналов способны значительно упростить конструкцию устройства, используя предложенный способ формирования и обработки сигналов.
ЛИТЕРАТУРА
1. Виницкий А.С. «Очерк основ радиолокации при непрерывном излучении радиоволн». М.: Сов. радио, 1961.
2. Stevens J.E., Nagy L.L. «Diplex Doppler radar for automotive obstacle detection» // IEEE Transactions on Vehicular Technology, 1974, vol. 23, no. 2, pp. 34-44.
3. Сысоева С. «Актуальные технологии и применение датчиков автомобильных систем активной безопасности. Часть 6. Радары» // Компоненты и технологии. 2007. №3. С. 67-76.
4. Патент США US 6677887 B2, 13.01.2004. МПК G01S 13/62. «Intrusion detection radar system» / R.K. Harman
5. Заявка Великобритании GB 1554661, 24.10.1979. МПК G01S 9/42. «Dual frequency radar intruder detector» / N.I. Buckley
6. Заявка Великобритании GB 2073984, 21.10.1981. МПК G01S 13/56. «Microwave detecting circuit» / R.C. Birks.
7. Носков В.Я., Варавин A.B., Васильев А.С., Ермак Г.П., Закарлюк Н.М., Игнатков К.А., Смольский С.М. «Современные гибридно-интегральные автодинные генераторы микроволнового и миллиметрового диапазонов и их применение. Часть 9. Радиолокационное применение автодинов» // Успехи современной радиоэлектроники. 2016. №3. С. 32-86.
8. Патент США US 3155972, 03.11.1964. НКП 343-12. «Continuous wave radar» / W.D. Boyer.
9. Nilssen O.K. «New methods of range measuring Doppler radar» // IRE Transactions on Aerospace and Navigational Electronics, 1962, vol. ANE-9, no. 4, pp. 255-265.
10. Терещенко А.Ф., Яшин B.A. «Двухчастотный доплеровский автодинный дальномер» // Электронная техника. Сер. Контрольно-измерительная аппаратура, 1966, №3, с. 109-117.
11. Патент США US 3659293, 25.04.1972. МПК G01S 9/04. «Range-detecting Doppler radar» / R.R. Gupta.
12. Патент США US 3697985, 10.10.1972. НПК 343-5PD. «Rear end warning system for automobiles» / W.R. Faris.
13. Патент США US 3750171, 31.07.1973., G01S 9/24, G01S 9/46. «Diplexed multi-frequency CW Doppler radar» / W.R. Faris.
14. Патент США US 3750172, 31.07.1973., G01S 9/38, G01S 9/44. «Multifrequency CW radar with range cutoff» /C.P. Tresselt.
15. Патент США US 3766554, 16.10.1973. МПК G01S 9/24. «Range cutoff system for dual frequency CW radar» / C.P. Tresselt.
16. Патент США US 3832709, 28.08.1974., МПК G01S 9/42. «Motion detection apparatus having the ability to determine the direction of motion and range of a moving object» / C.F. Klein.
17. Патент США US 3898655, 05.08/1975., МПК G01/S9/44. «Variable range cutoff system for dual frequency CW radar» / C.P. Tresselt.
18. Патент США US 4893125, 09.01.1990. МПК G01S 13/38. «Vehicle diplex Doppler near-obstacle detection system» / P.A. May.
19. Патент США US 7079030, 18.07.2006. МПК G08B 13/18. «Microwave sensor» / M. Tsuji.
20. Патент США US 7167008, 23.06.2007. МПК G01S 13/00. «Microwave sensor for object detection basid on reflected microwaves» / M. Tsuji.
21. Заявка Японии: JPH 02181686 A, 16.07.1990. МПК G01S 13/56. «Diplex Doppler type obstacle detector for vehicle» / F.A. Mei.
22. Заявка ЕР: EP 0367404, 29.09.1989. МПК G01S 13/56. «Vehicle diplex Doppler near-obstacle detection apparatus)) / P.A. May.
23. «24.125 GHz, K-Band FMCW Radar Sensor» // Описание на сайте: www.sagemillimeter.com
24. Патент КНР: CN 2938141, 22.08.2007. МПК G01S 13/93. «Vehicle-mounted anti-collision radar system» / X.G. Yang.
25. Патент США US 3889261 A, 10.06.1975. МПК G01S 09/24. «Range measurement pulse radar system» / J. Sirven.
26. Патент США US 4697184 A, 29.09.1987. МПК G01S 13/56. «Intrusion detection radar system with amplitude and frequency carrier modulation to eliminate targets at short and long ranges» / J. Cheal.
27. Патент США US 5539410 A, 23.07.1996. МПК F42C 13/04. «Pulse Doppler proximity sensor» / J.E. Zveglich.
28. Носков В.Я., Смольский С.М. «Современные гибридно-интегральные автодинные генераторы микроволнового и миллиметрового диапазонов и их применение. Часть 6. Исследования радиоимпульсных автодинов» // Успехи современной радиоэлектроники. 2009. №6. С. 3-51.
29. Патент США US 6380882, 30.04.2002. МПК G01S 13/56. «Motion detector based on the Doppler principle» / S. Hegnauer.
30. Патент США US 6677887, 13.06.2004. МПК G01S 13/62. «Intrusion detection radar system» / R.K. Harman.
31. Патент США US 6703967, 09.03.2004., G01S 13/38. «Distance measuring device» / H. Kuroda.
32. Патент США US 7791528, 07.09.2010., G01S 13/00, G01S 13/58. «Method and apparatus for radar signal processing» / D. Klotzbuecher.
33. Заявка ЕР: EP 1067397, 25.01.2006. МПК G01S 13/56. «Bewegungsmelder nach dem Doppler-Prinzip» / S. Hegnauer.
34. Патент КНР: CN 104898114, 09.09.2015. МПК G01S 13/58. «FSK-CW radar design and realization method» / Z.M. Yan.
35. «Руководство пользователя: Семейство микроконтроллеров MSP430X1XX». Пер. с англ. М.: ЗАО «Компэл», 2004.
36. Воторопин С.Д., Носков В.Я., Смольский С.М. «Современные гибридно-интегральные автодинные генераторы микроволнового и миллиметрового диапазонов и их применение. Часть 5. Исследования автодинов с частотной модуляцией» // Успехи современной радиоэлектроники. 2009. №3. С. 3-50.
37. Патент США US 3913106, 14.10.1975. МПК G01S 9/24. «Radar detection apparatus for preventing vehicular collisions» / K. Sato.
38. «Антенны и устройства СВЧ. Расчет и проектирование антенных решеток и их излучающих элементов» / Под ред. Д.И. Воскресенского. - М.: Радио и связь, 1972.
39. Kotani М., Mitsui S., Shirahata K. «Load-variation detector characteristics of a detector-diode loaded Gunn oscillator» // Electronics and Communications in Japan. 1975. Vol. 58-B. No. 5. P. 60-66.
40. Носков В.Я., Смольский С.М. «Регистрация автодинного сигнала в цепи питания генераторов на полупроводниковых диодах СВЧ. (Обзор)» // Техника и приборы СВЧ. 2009. №1. С. 14-26.
41. Щербаков В.И., Грездов Г.И. «Электронные схемы на операционных усилителях: Справочник». К.: Техника, 1983.
42. Херпи М. «Аналоговые интегральные схемы». М.: Радио и связь, 1983.
43. Ровдо А.А. «Полупроводниковые диоды и схемы с диодами». М.: Лайт ЛТД, 2000.
44. Шило В.Л. «Популярные цифровые микросхемы». М.: Металлургия, 1988.
45. Авт. свид-во СССР №683006 от 30.08.1979. (Бюлл. №32), МПК H03K 5/20. «Устройство сравнения временных интервалов» / С.Я. Красюкова.
46. Алешечкин A.M., Мусонов В.М., Романов А.П. «Метрология и радиоизмерения». Учебное пособие. Красноярск: СибФУ, 2008.
47. Комаров И.В., Смольский С.М. «Основы теории радиолокационных систем с непрерывным излучением частотно-модулированных колебаний». М.: Горячая линия-Телеком, 2010.
48. «Метрология и радиоизмерения» под ред. В.И. Нефедова. М.: Высшая школа, 2003.
49. Ратхор Т.С «Цифровые измерения. Методы и схемотехника». М.: Техносфера, 2004.
50. Денисенко А.Н. Сигналы. «Теоретическая радиотехника. Справочное пособие». М.: Горячая линия - Телеком, 2005.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБРАБОТКИ РАДИОЛОКАЦИОННЫХ СИГНАЛОВ ДЛЯ ОБНАРУЖЕНИЯ ЦЕЛЕЙ И ИЗМЕРЕНИЯ ИХ ПАРАМЕТРОВ ДВИЖЕНИЯ В ЗОНЕ СЕЛЕКЦИИ И РАДИОЛОКАЦИОННЫЙ ДАТЧИК ЕГО РЕАЛИЗУЮЩИЙ | 2021 |
|
RU2783402C1 |
| АВТОДИННЫЙ ФОТОДЕТЕКТОРНЫЙ ПРИЕМОПЕРЕДАТЧИК ДЛЯ СИСТЕМ БЛИЖНЕЙ РАДИОЛОКАЦИИ | 2023 |
|
RU2824039C1 |
| СПОСОБ ИМПУЛЬСНО-ДОПЛЕРОВСКОЙ РАДИОЛОКАЦИИ И УСТРОЙСТВО С АВТОДИННЫМ ПРИЁМОПЕРЕДАТЧИКОМ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2023 |
|
RU2803413C1 |
| СПОСОБ И УСТРОЙСТВО РАДИОЛОКАЦИОННОГО ИЗМЕРЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ НАЗЕМНОГО ТРАНСПОРТНОГО СРЕДСТВА ОТНОСИТЕЛЬНО ПОДСТИЛАЮЩЕЙ ПОВЕРХНОСТИ | 2022 |
|
RU2793338C1 |
| АВТОДИННЫЙ ПРИЕМОПЕРЕДАТЧИК ДЛЯ СИСТЕМ БЛИЖНЕЙ РАДИОЛОКАЦИИ | 2021 |
|
RU2779887C1 |
| СПОСОБ И УСТРОЙСТВО РАДИОЛОКАЦИОННОГО ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ОТЦЕПОВ НА СОРТИРОВОЧНОЙ ГОРКЕ | 2023 |
|
RU2805901C1 |
| Способ обнаружения, идентификации и мониторинга вибрирующих объектов | 2019 |
|
RU2713433C1 |
| РАДИОФОТОННАЯ СИСТЕМА ЛОКАЦИИ ДЛЯ ОПРЕДЕЛЕНИЯ СКОРОСТИ ОТЦЕПОВ НА СОРТИРОВОЧНОЙ ГОРКЕ | 2023 |
|
RU2812744C1 |
| РАДИОФОТОННАЯ СИСТЕМА ЛОКАЦИОННОГО ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ОТЦЕПОВ НА СОРТИРОВОЧНОЙ ГОРКЕ | 2023 |
|
RU2838248C1 |
| СПОСОБ РАДИОЛОКАЦИОННОГО КОНТРОЛЯ СОСТОЯНИЯ СТРЕЛОЧНОГО ПЕРЕВОДА СОРТИРОВОЧНОЙ ГОРКИ И ДАТЧИК ЕГО РЕАЛИЗУЮЩИЙ | 2022 |
|
RU2792315C1 |
Изобретение относится к области радиолокации с частотной манипуляцией непрерывного излучения (ЧМНИ) радиоволн и может быть использовано для обнаружения движущихся целей, измерения расстояния до объекта локации, скорости и направления движения. Достигаемый технический результат - расширение рабочей области радиолокационных датчиков (РЛД) с ЧМНИ радиоволн по дальности и скорости в сторону их увеличения, обеспечение возможности определения направления движения объекта локации, а также снижение уровня внеполосного излучения. Указанный результат достигается за счет того, что полученный на разных частотах доплеровский сигнал усиливают и формируют, затем подсчитывают целое число периодов доплеровского сигнала и переключают частоту зондирующего радиосигнала с одной частоты на другую в моменты перехода доплеровского сигнала через нуль. Устройство, реализующее заявленный способ, содержит антенну, доплеровский приемо-передатчик с ЧМ, усилитель, амплитудно-пороговый формирователь, счетчик-делитель с дешифратором, блок сравнения временных интервалов и блок измерения, определенным образом соединенные между собой. 2 н. и 4 з.п. ф-лы, 4 ил.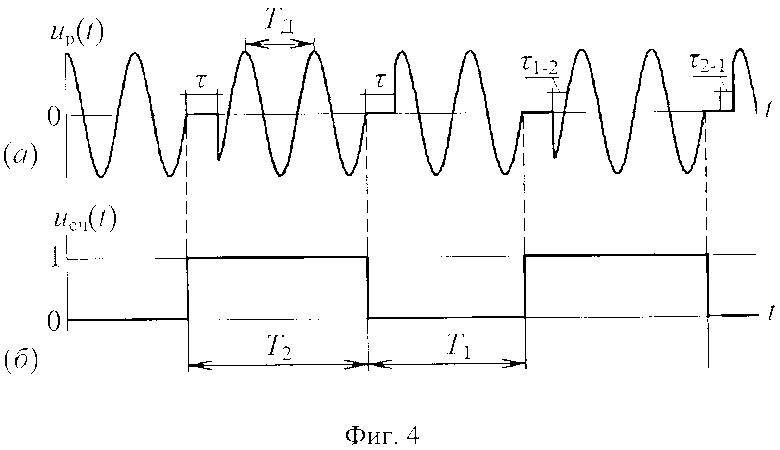
1. Способ определения параметров движения объектов локации в радиолокационных датчиках с частотной манипуляцией непрерывного излучения радиоволн, при котором поочередно облучают движущийся объект локации зондирующим радиосигналом на двух частотах, принимают отраженный от движущегося объекта локации радиосигнал на этих же частотах, смешивают его с частью зондирующего радиосигнала, преобразуют его в область низких частот, получают доплеровский сигнал и его усиливают, отличающийся тем, что полученный после усиления доплеровский сигнал формируют в виде импульсов, причем срез этих импульсов совпадает с переходом доплеровского сигнала через нуль при одном и том же знаке производной от его мгновенного значения, после этого производят подсчет целого числа периодов сформированных импульсов и дешифрируют результат подсчета, по завершению подсчета, переключают частоту зондирующего радиосигнала с одной частоты на другую в моменты перехода доплеровского сигнала через нуль при одном и том же знаке производной от его мгновенного значения, при этом дальность до объекта локации определяют по разности временных интервалов излучения зондирующего радиосигнала на одной и другой частотах, направление движения объекта локации определяют по знаку упомянутой разности временных интервалов, а относительную скорость движения объекта определяют исходя из длительности периодов доплеровского сигнала, получаемых после дешифрации.
2. Устройство, реализующее способ по п. 1 и содержащее антенну, связанную с управляемым по частоте доплеровским приемопередатчиком, и усилитель, подключенный к сигнальному выходу управляемого по частоте доплеровского приемопередатчика, отличающееся тем, что введены амплитудно-пороговый формирователь, подключенный к выходу усилителя, счетчик-делитель, совмещенный с дешифратором, блок сравнения временных интервалов и блок измерений, при этом к первому выходу амплитудно-порогового формирователя подключен счетный вход счетчика-делителя, а ко второму выходу амплитудно-порогового формирователя подключены вход сброса счетчика-делителя, первый вход блока сравнения временных интервалов и входная клемма «Обнаружение» блока измерений, причем неинвертирующий и инвертирующий выходы счетчика-делителя соответственно подключены ко второму и третьему входам блока сравнения временных интервалов, выход которого подключен к входной клемме «Дальность» блока измерений, при этом неинвертирующий выход счетчика-делителя подключен также к входу управления частотой доплеровского приемопередатчика, а выход одного из старших разрядов дешифратора - к входной клемме «Скорость» блока измерений.
3. Устройство по п. 2, отличающееся тем, что управляемый по частоте доплеровский приемопередатчик выполнен по гомодинной схеме, при этом он содержит отдельные узлы передатчика и приемника, связанные с антенной через элемент развязки, например циркулятор.
4. Устройство по п. 2, отличающееся тем, что управляемый по частоте доплеровский приемопередатчик выполнен по автодинной схеме, при этом он содержит в качестве приемопередатчика связанный с антенной автогенератор, состыкованный со средством выделения доплеровского сигнала.
5. Устройство по п. 2, отличающееся тем, что амплитудно-пороговый формирователь содержит первый и второй компараторы с противошумовым гистерезисом и линейный амплитудный детектор доплеровского сигнала, при этом входы первого компаратора с противошумовым гистерезисом и линейного амплитудного детектора соединены вместе, образуя вход амплитудно-порогового формирователя, а выход первого компаратора с противошумовым гистерезисом является первым выходом амплитудно-порогового формирователя, а выход линейного амплитудного детектора подключен к входу второго компаратора, выход которого является вторым выходом амплитудно-порогового формирователя.
6. Устройство по п. 2, отличающееся тем, что блок сравнения временных интервалов содержит цифровой измеритель временных интервалов, выполненный на основе реверсивного счетчика, в котором счетный вход «Больше» реверсивного счетчика, является вторым входом блока сравнения временных интервалов, а счетный вход «Меньше» - третьим входом блока сравнения временных интервалов, вход сброса реверсивного счетчика является первым входом блока сравнения временных интервалов.
| US 3913106 A, 14.10.1975 | |||
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ОБЪЕКТА | 2013 |
|
RU2534220C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ОБЪЕКТА | 1999 |
|
RU2154840C1 |
| СПОСОБ ИНДИКАЦИИ ПОЛОЖЕНИЯ ОБЪЕКТОВ НАБЛЮДЕНИЯ | 2006 |
|
RU2333538C2 |
| US 4001823 A, 04.01.1977 | |||
| US 20130300596 A1, 14.11.2013 | |||
| WO 2003083505 A1, 09.10.2003. | |||

