Область техники, к которой относится настоящее изобретение
Настоящее изобретение относится к летательному аппарату. В частности, настоящее изобретение относится к подъемному приспособлению в сборе в летательном аппарате.
Предшествующий уровень техники настоящего изобретения
Динамика летательного аппарата зависит от противодействия сил его лобового сопротивления и земного тяготения, воздействующих на летательный аппарат. Подъемные силы служат для преодоления влияния гравитации на летательный аппарат. Подъемные силы обеспечиваются крыльями постоянной стреловидности, которые рассчитаны на создание дифференциального давления с целью генерирования подъемной силы во время горизонтального полета. В альтернативном варианте подъемную силу может создавать несущий винт, как в случае винтокрылых летательных аппаратов. Во время вертикального взлета, посадки или зависания в воздухе для создания подъемной силы может быть использован комплект винтов. Однако во время горизонтального полета эти винты работают вхолостую и становятся балластом, поскольку они не создают подъемную силу.
В патенте CN103043212A раскрывается летательный аппарат из композиционных материалов, состоящий из крыла постоянной стреловидности и электрического мультиротора, который содержит силовую установку электрического мультиротора и общий контроллер. Система электроснабжения крыла постоянной стреловидности и силовая установка электрического мультиротора конструктивно не зависят друг от друга. Полезный образец содержит систему управления крылом постоянной стреловидности и систему управления электрическим мультиротором для управления работой силовой установки электрического мультиротора. Общий контроллер выполнен с дополнительной возможностью регулирования системы управления крылом постоянной стреловидности и системы управления электрическим мультиротором, которые могут работать по отдельности или во взаимодействии. Плоскость вращения винтов силовой установки электрического мультиротора проходит параллельно центральной оси фюзеляжа. Обеспечивается возможность свободного переключения между двумя режимами полета, как при взлете и полете вертолета, так и при взлете и посадке по типу самолета с неизменяемой геометрией крыла или использовании двух силовых агрегатов во время взлета и посадки.
Коэффициент подъемной силы (CL) представляет собой безразмерный коэффициент, который соотносит подъемную силу, генерируемую несущим корпусом, с плотностью рабочей среды, обтекающей этот корпус, скоростью рабочей среды и соответствующей базовой площадью. Несущий корпус представляет собой аэродинамический профиль или все тело, несущее аэродинамический профиль, такое как самолет с неизменяемой геометрией крыльев. Коэффициент CL зависит от формы корпуса, угла несущего корпуса относительно потока, его числа Рейнольдса и его числа Маха. Форма корпуса является основным фактором, который определяет значение коэффициента CL. Коэффициент CL представляет собой число, которое специалист по аэродинамике использует для моделирования всех сложных зависимостей формы, наклона и некоторых характеристик потока от подъемной силы.
На требуемую подъемную силу, а также на размеры и конструкцию крыльев влияет целевая нагрузка, которую должен нести летательный аппарат, и желательная скорость перемещения. Конструкция крыла, в свою очередь, влияет на размеры летательного аппарата, что определяет область применения летательного аппарата. Компактная система с низким энергопотреблением, предназначенная для создания необходимой подъемной силы летательного аппарата, позволит расширить область его применения и повысить энергетическую эффективность.
Усилия по увеличению коэффициента подъемной силы, прилагаемые компонентами или механизмами, которые используются для генерирования подъемной силы, необходимы для эффективного проектирования летательного аппарата.
С учетом важности увеличения коэффициента подъемной силы для расширения области применения и энергетической эффективности летательного аппарата необходимо предпринять усилия по проектированию систем, которые позволят добиться этой цели. При этом может быть увеличена максимальная целевая нагрузка, а также продолжительность и дальность полета летательного аппарата.
Цели настоящего изобретения
Основная цель настоящего изобретения заключается в том, чтобы обеспечить увеличение коэффициента подъемной силы летательного аппарата с неизменяемой геометрией крыльев.
Дополнительная цель настоящего изобретения заключается в том, чтобы переориентировать винты, которые работают вхолостую во время горизонтального полета.
Краткое раскрытие настоящего изобретения
Настоящее изобретение относится к подъемному приспособлению в сборе в летательном аппарате. Подъемное приспособление в сборе содержит крыло и, по меньшей мере, один вертикальный винт. Вертикальный винт располагается под крылом таким образом, что он находится в пределах размаха крыла. Вертикальный винт работает во время горизонтального полета. Кроме того, вертикальный винт отстоит от передней кромки на расстояние размещения. Расстояние размещения представляет собой расстояние между передней кромкой и вертикальной осью вертикального винта. Расстояние размещения зависит от числа оборотов в минуту (об/мин) вертикального винта, диаметра вертикального винта, угла атаки крыла и хорды крыла. Подъемное приспособление в сборе рассчитано на максимальное увеличение подъемной силы.
Подъемное приспособление в сборе создает увеличенную подъемную силу, что позволяет использовать крылья малого размера и, соответственно, влечет за собой уменьшение лобового сопротивления. Это обеспечивает летательному аппарату возможность перемещения с пониженной скоростью и еще больше снижает лобовое сопротивление или позволяет переносить больше полезного груза при полете с такой же скоростью. При этом увеличивается продолжительность и дальность полета летательного аппарата.
Эти цели и преимущества настоящего изобретения станут понятнее после ознакомления с последующим подробным описанием в привязке к прилагаемым чертежам.
Краткое описание фигур
Цель настоящего изобретения будет подробнее описана ниже в привязке к прилагаемым чертежам, где:
На фиг. 1 показан воздушный поток в условиях наличия крыла постоянной стреловидности и работающего вертикального винта согласно одному из вариантов осуществления настоящего изобретения.
На фиг. 2 показано распределение давления, рассчитанное путем моделирования методом вычислительной гидродинамики (CFD) в поле обтекания подъемного приспособления в сборе, согласно одному из вариантов осуществления настоящего изобретения.
На фиг. 3 представлена контурная диаграмма, иллюстрирующая изменение синергетической подъемной силы в подъемном приспособлении в сборе при изменении положения винта и угла атаки, когда хорда крыла равна 48 см, а частота вращения винта составляет 6500 об/мин, согласно одному из вариантов осуществления настоящего изобретения.
На фиг. 4 показано увеличение подъемной силы при варьировании расстояния размещения винта по мере увеличения тяги от 0 до 100% согласно одному из вариантов осуществления настоящего изобретения.
На фиг. 5 показан вид снизу подъемного приспособления в сборе согласно одному из вариантов осуществления настоящего изобретения.
На фиг. 6 показан вид спереди подъемного приспособления в сборе согласно одному из вариантов осуществления настоящего изобретения.
Подробное раскрытие настоящего изобретения
В летательных аппаратах с крыльями постоянной стреловидности подъемные силы генерируются крыльями во время горизонтального полета. Когда воздушный поток обтекает крылья во время горизонтального полета, форма и ориентация крыла генерируют барическое поле с низким давлением на верхней поверхности крыла, которая известна как сторона пониженного давления, и с высоким давлением на нижней поверхности крыла, которая известна как сторона повышенного давления. Подъемные силы порождаются барическим полем.
Кроме того, вертикальные винты рассчитаны на использование во время взлета, посадки и зависания в воздухе. Но во время горизонтального полета вертикальные винты становятся балластом. В соответствии с настоящим изобретением разработано подъемное приспособление в сборе, которое использует подъемную силу, создаваемую работающими вертикальными винтами во время горизонтального полета. Наличие винтов и их работа видоизменяет поле обтекания и, соответственно, барическое поле вокруг крыла.
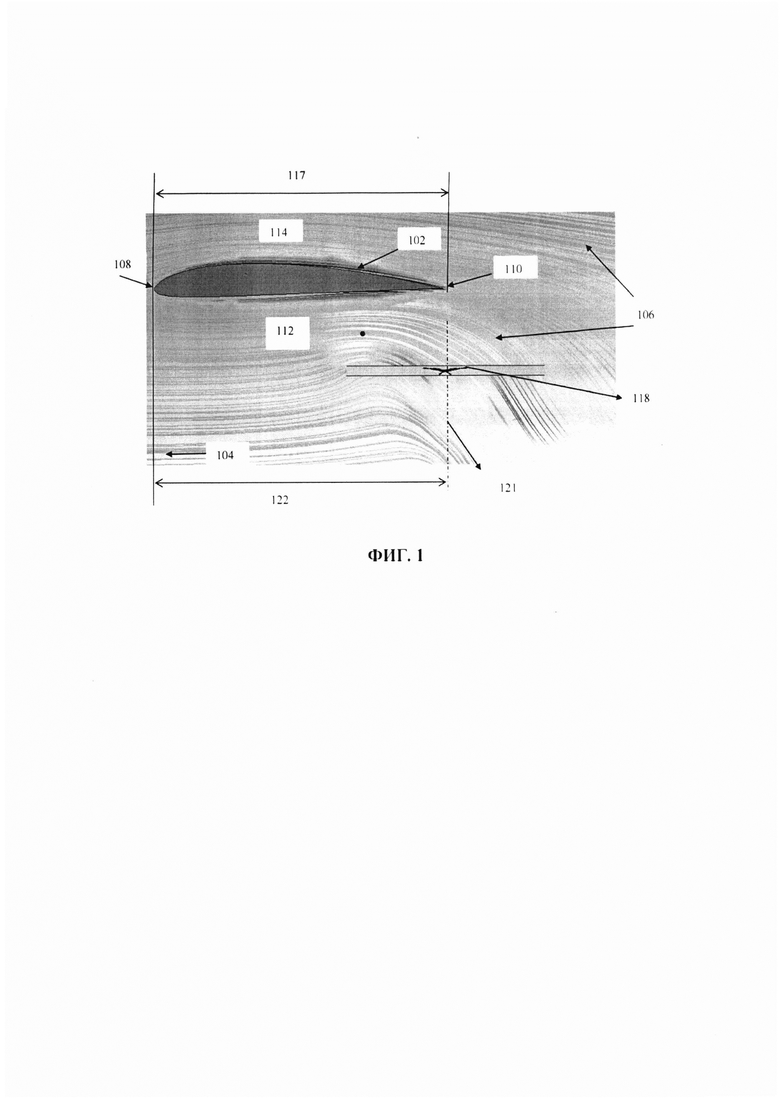
На фиг. 1 показан воздушный поток в условиях наличия крыла постоянной стреловидности и работающего вертикального винта согласно одному из вариантов осуществления настоящего изобретения. Здесь показано поперечное сечение крыла 102 постоянной стреловидности. Стрелка 104 обозначает направление горизонтального полета. Воздушный поток, поступающий на крыло 102 постоянной стреловидности и обтекающий его, обозначен линиями 106, указывающими на воздушный поток. Крыло 102 постоянной стреловидности характеризуется наличием первого конца, также именуемого передней кромкой 108, и второго конца, также именуемого задней кромкой 110. Под крылом 102 постоянной стреловидности создается область высокого давления, которая называется стороной 112 повышенного давления, а над крылом 102 постоянной стреловидности создается область низкого давления, которая называется стороной 114 пониженного давления. Точечная пунктирная линия по центру крыла 102 постоянной стреловидности образует угол к горизонтальной оси, называемый углом 116 атаки. Расстояние между передней кромкой 108 и задней кромкой 110 называется хордой 117. Хорда 117 обозначена символом с. Вертикальный винт 118 располагается под крылом 102 постоянной стреловидности, и он работает во время горизонтального полета. Вертикальная ось 121 вертикального винта 118 проходит по границе размаха крыла 102 постоянной стреловидности на стороне 112 повышенного давления.
Если вертикальный винт 118 установлен надлежащим образом относительно крыла 102 постоянной стреловидности, то видоизмененный воздушный поток изменяет барическое поле на стороне 112 повышенного давления и на стороне 114 пониженного давления, увеличивая тем самым подъемные силы. Вертикальное расстояние между передней кромкой 108 и вертикальной осью 121 называется расстоянием 122 размещения. Расстояние 122 размещения задано переменной y. Отношение расстояния 122 размещения к хорде 117, у/с, представляет собой безразмерную переменную, обозначенную символом р. Когда вертикальная ось 121 проходит у передней кромки 108, величина p равна нулю, а когда вертикальная ось 121 проходит у задней кромки 110, величина p равна единице. На фиг.2 показано распределение давления, рассчитанное путем моделирования методом вычислительной гидродинамики (CFD) в поле обтекания подъемного приспособления в сборе, согласно одному из вариантов осуществления настоящего изобретения. Взаимодействие крыла и винта в поле обтекания четко видно по результатам CFD-моделирования. Область низкого давления проходит по всей стороне пониженного давления вплоть до винта. Это приводит к тому, что вся система в целом синергетически создает усилие, направленное вертикально вверх.
Синергетическая подъемная сила создается за счет размещения одного или нескольких винтов соответствующим образом относительно крыла в пределах его размаха таким образом, что на поверхности крыла возрастает результирующее давление, направленное вверх, вследствие работы винта/винтов, что увеличивает подъемную силу, создаваемую крылом, которая превышает сумму подъемных сил, создаваемых по отдельности крылом и винтом/винтами.
Подъемные силы выражаются в количественной форме коэффициентом CL подъемной силы, который задается уравнением (1). Величина CL принята в качестве показателя, указывающего на эффективность подъемного приспособления в сборе.
Подъемная сила, создаваемая подъемным приспособлением в сборе, обозначена величиной L, плотность воздуха обозначена величиной ρ, скорость воздуха обозначена величиной ν, а площадь крыла в плане обозначена величиной S. Подъемная сила L также служит показателем, оценивающим эффективность подъемного приспособления в сборе.
Для анализа этого явления был проведен эксперимент с целью определения подъемной силы в подъемном приспособлении в сборе с неподвижным винтом, располагающимся на разных расстояниях от передней кромки. Такой же эксперимент был проведен с целью определения подъемной силы в подъемном приспособлении в сборе с винтом, вращающимся с частотой, варьирующейся в пределах 500-6500 об/мин с шагом 500 об/мин. Результаты эксперимента были следующими:
Эксперимент проводился с размещением крыла постоянной стреловидности на плоской опорной поверхности с использованием опор у законцовок крыла таким образом, чтобы можно было варьировать угол атаки. Затем опорная поверхность была помещена на электронные весы с целью определения генерируемой подъемной силы. Вертикальный винт был установлен на стенде таким образом, чтобы его ось проходила перпендикулярно опорной поверхности. На фиксированном расстоянии от передней кромки крыла был размещен промышленный вентилятор, использованный для создания входящего невозмущенного потока, обтекающего собранную конструкцию, путем подачи воздуха, нагнетаемого с постоянной скоростью. Положение винта варьировалось вдоль хорды крыла для изменения числа оборотов винта в минуту и угла атаки крыла. Было отмечено, что увеличение угла атаки крыла при заданном числе оборотов в минуту и положении винта приводило к увеличению коэффициента подъемной силы. Размещение винта дальше по потоку при заданном числе оборотов винта в минуту и угле атаки крыла также привело к увеличению коэффициента подъемной силы. Более высокое число оборотов винта в минуту при сохранении заданного положения винта и угла атаки крыла дало увеличение коэффициента подъемной силы. Повышение числа оборотов винта в минуту также привело к увеличению разницы между коэффициентами подъемной силы для разных положений винта и углов атаки крыла. Воздушный поток и критический угол атаки крыла были существенно изменены из-за наличия винта. Эксперимент был повторен для такого же набора параметров при отключенном промышленном вентиляторе, но с работающим винтом. Результаты, полученные при неработающем винте и включенном промышленном вентиляторе, были сравнены с результатами, полученными при работающем винте и отключенном промышленном вентиляторе. При этом первый вариант дает подъемную силу, генерируемую отдельно крылом, а второй вариант дает подъемную силу, генерируемую отдельно винтом. Подъемная сила, сгенерированная в обоих этих сценариях, была суммирована для выдачи суммарного коэффициента подъемной силы двух компонентов, работавших по отдельности. Коэффициент подъемной силы, рассчитанный при одновременной работе винта и промышленного вентилятора, обеспечивает совокупный эффект работы крыла и винта во время горизонтального полета. Сравнение результатов эксперимента успешно доказало наличие синергетического эффекта при взаимодействии крыла постоянной стреловидности с работающим винтом с получением более высокого коэффициента подъемной силы собранной конструкции в сравнении с суммой значений коэффициента подъемной силы при работе двух указанных компонентов по отдельности.
Для этого эксперимента высота винта от крыла не изменялась. Также варьировался угол атаки (угол, под которым установлен аэродинамический профиль).
Была установлена подъемная сила, созданная комбинацией крыла 102 постоянной стреловидности и вертикального винта 118, после чего она была сопоставлена с суммой значений подъемной силы, созданной по отдельности крылом 102 постоянной стреловидности и вертикальным винтом 118 при размещении вертикального винта 118 с разными значениями величины р.
Отношение коэффициента подъемной силы, установленного с использованием комбинации крыла 102 постоянной стреловидности и вертикального винта 118, CL new, к коэффициенту подъемной силы, установленному с использованием суммы значений подъемной силы, созданной по отдельности крылом 102 постоянной стреловидности и вертикальным винтом 118, CL, определяет синергетическую подъемную силу.
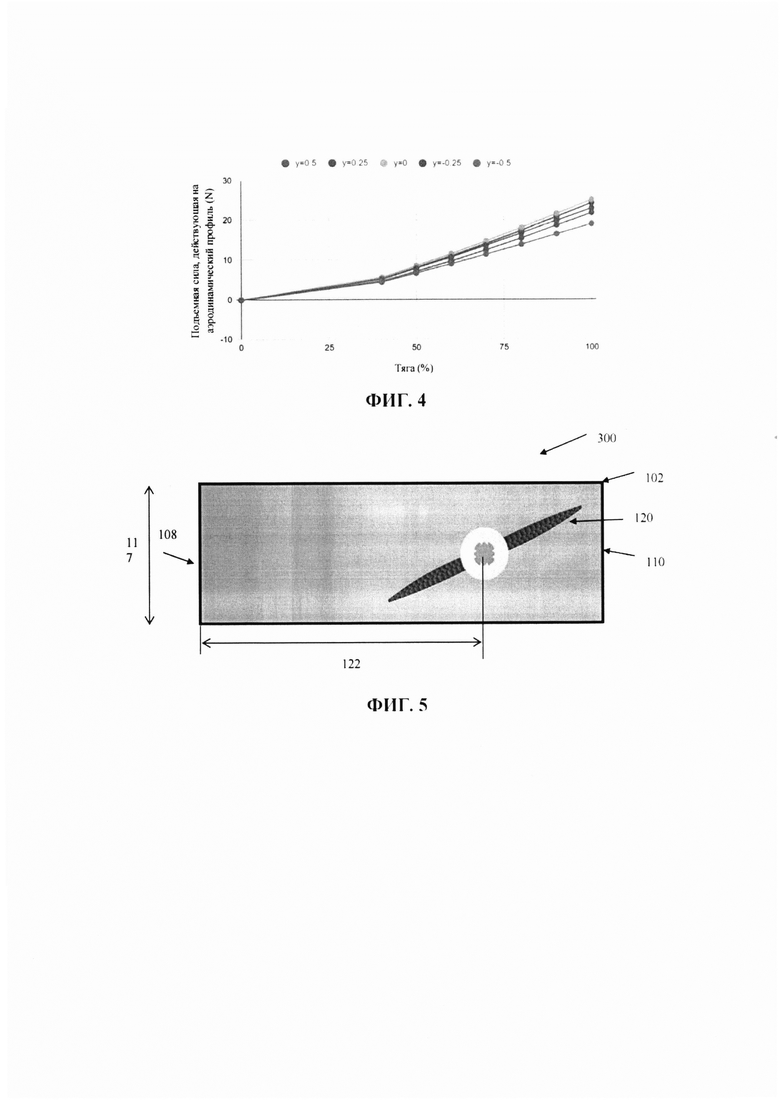
На фиг. 3 представлена контурная диаграмма, иллюстрирующая изменение синергетической подъемной силы в подъемном приспособлении в сборе при изменении положения винта и угла атаки, когда хорда крыла равна 48 см, а частота вращения винта составляет 6500 об/мин, согласно одному из вариантов осуществления настоящего изобретения. Как можно видеть на фиг. 3, суммарная подъемная сила, созданная системой, объединяющей в себе крыло 102 постоянной стреловидности и работающий вертикальный винт 118, превысила сумму подъемных сил, созданных по отдельности крылом 102 постоянной стреловидности и вертикальным винтом 118, обеспечив синергетическую подъемную силу. Кроме того, указанное отношение варьируется с изменением значения p и угла атаки при хорде крыла 48 см и частоте вращения винта 6500 об/мин, достигая максимума в пределах около 20; причем 20-кратное увеличение демонстрирует эффективность использования спроектированного надлежащим образом подъемного приспособления в сборе с работающим в горизонтальном полете винтом.
Таким образом, для повышения подъемной силы летательного аппарата спроектировано подъемное приспособление 300 в сборе, содержащее крыло 102 постоянной стреловидности и, по меньшей мере, вертикальный винт 118, располагающийся таким образом, чтобы при работе он мог увеличивать подъемные силы.
Подъемное приспособление 300 в сборе выполнено таким образом, что обеспечивается оптимизация переменных подъемного приспособления 300 в сборе. Значение величины p, при котором подъемное приспособление 300 в сборе создает максимальную подъемную силу, зависит от числа рабочих оборотов в минуту вертикального винта 118, хорды 117 и угла 116 атаки. Таким образом, для получения подъемного приспособления 300 в сборе с увеличенной подъемной силой проводится оптимизация хорды 117, расстояния 122 размещения, числа рабочих оборотов в минуту вертикального винта 118 и угла 116 атаки. Для этого было выполнено CFD-моделирование для заданной хорды 1 м, числа рабочих оборотов в минуту вертикального винта при 70% тяги и угла атаки 0 градусов, причем винт располагался в различных положениях относительно крыла в направлениях X и Y с фиксированным размещением оси Z на уровне 0 м. Значения созданной подъемной силы, выраженной в N (Ньютонах), показаны в Таблице 1.
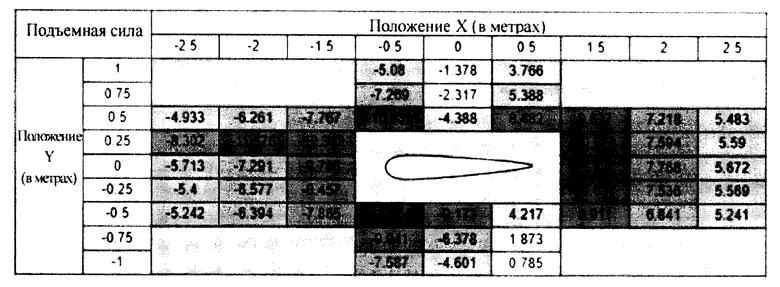
Таблица 1: Созданная подъемная сила, выраженная в N и рассчитанная путем CFD-моделирования, с винтом, установленным в различных положениях относительно крыла с заданной хордой 1 м, числом рабочих оборотов в минуту вертикального винта при 70% тяги и углом атаки 0 градусов.
Результаты указывают на то, что оптимальным местом размещения винта для максимального повышения подъемной силы является задняя часть крыла. Подъемная сила достигает максимума, когда винт находится сразу за крылом при Y=0, и подъемная сила уменьшается по мере возрастания абсолютной величины положения Y.
Другим важнейшим фактором, рассчитанным в ходе CFD-исследований, является прирост лобового сопротивления, значения которого представлены в Таблице 2. Эти значения указывают на уменьшение лобового сопротивления и, в конечном счете, на реверсирование лобового сопротивления, обусловленное взаимодействием винта с полем обтекания крыла.
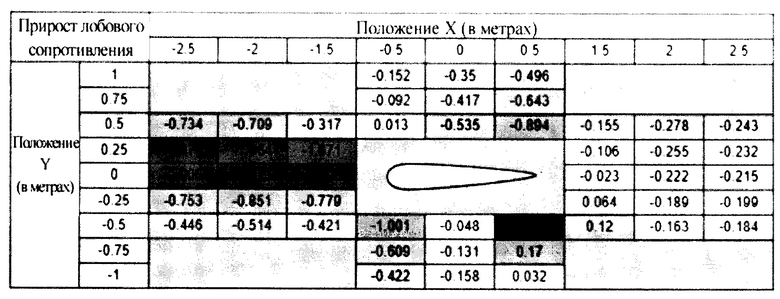
Таблица 2: Прирост лобового сопротивления, рассчитанный путем CFD-моделирования, с винтом, установленным в различных положениях относительно крыла с заданной хордой 1 м, числом рабочих оборотов в минуту вертикального винта при 70% тяги и углом атаки 0 градусов.
Размещение винта впереди крыла вблизи его передней кромки обеспечивает максимальное уменьшение лобового сопротивления, и оказывается, что сила действует в направлении тяги.
Однако, поскольку лобовое сопротивление в положении максимальной подъемной силы уходит в минус, оптимальное размещение вертикального винта с заданным набором параметров обеспечивается в задней части крыла. Для выбора оптимального положения вертикального винта рассчитывается отношение подъемной силы к силе лобового сопротивления, значения которого суммированы в Таблице 3.
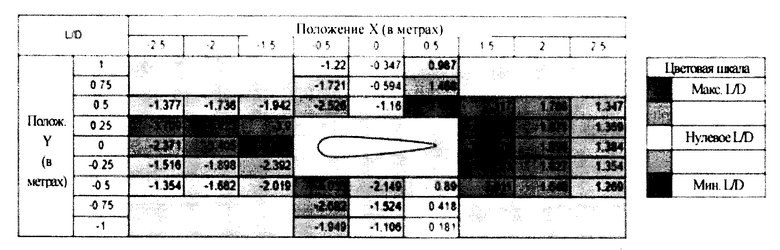
Таблица 3: Отношение подъемной силы к приросту лобового сопротивления (L/D). рассчитанное путем CFD-моделирования, с винтом, установленным в различных положениях относительно крыла с заданной хордой 1 м, числом рабочих оборотов в минуту вертикального винта при 70% тяги и углом атаки 0 градусов.
Отношение подъемной силы к силе лобового сопротивления достигает максимума в задней части крыла. Таким образом, оптимальное размещение вертикального винта обеспечивается в задней части крыла.
На фиг. 4 показано увеличение подъемной силы при варьировании вертикального расстояния винта по мере увеличения тяги от 0 до 100% согласно одному из вариантов осуществления настоящего изобретения. Фиг. 4 указывает на то, что при увеличении тяги от 0 до 100% подъемная сила возрастает линейно.
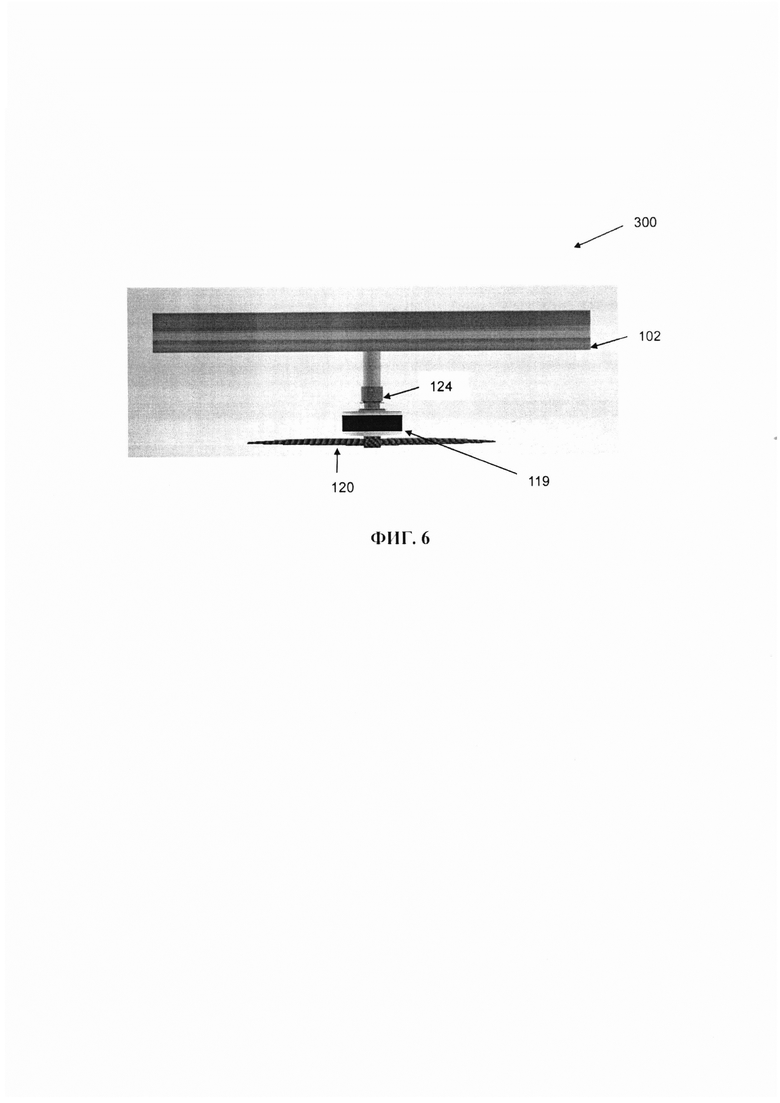
На фиг. 5 показан вид снизу подъемного приспособления (300) в сборе согласно одному из вариантов осуществления настоящего изобретения. Здесь изображено крыло 102 постоянной стреловидности с вертикальным винтом 118, расположенным в пределах размаха крыла 102 постоянной стреловидности. Вертикальный винт 118 располагается на расстоянии 122 размещения от передней кромки 108.
На фиг. 6 показан вид спереди подъемного приспособления (300) в сборе согласно одному из вариантов осуществления настоящего изобретения. Подъемное приспособление (300) в сборе дополнительно содержит планер (не показан на фигуре), который удерживает крыло 102 постоянной стреловидности. На планер устанавливается двигатель 119, для чего используется соединительный элемент 124. Таким образом, вертикальный винт 118 закрепляется на планере с помощью соединительного элемента 124. Соединительным элементом 124 может служить подвеска или стойка.
В одном из примеров осуществления настоящего изобретения в подъемном приспособлении 300 в сборе может быть установлено множество вертикальных винтов 118 для получения повышенного показателя CL.
В другом примере осуществления настоящего изобретения вертикальный винт 118 может быть добавлен к летательному аппарату с уже установленным крылом постоянной стреловидности. В этом случае угол 116 атаки является фиксированным, и для повышения коэффициента подъемной силы должно быть выбрано соответствующее значение величины p. После определения значения величины p выполняется подсоединение вертикального винта 118.
Ключевым аспектом настоящего изобретения является размещение одного или нескольких винтов рядом с крылом постоянной стреловидности. Это размещение изменяет поле обтекания, что - в свою очередь - изменяет барическое поле вокруг крыла постоянной стреловидности, обеспечивая в итоге увеличение подъемной силы, создаваемой крылом постоянной стреловидности. Совокупный эффект состоит в том, что суммарная подъемная сила, которая создается системой, объединяющей в себе крыло с вертикальным винтом, превышает сумму отдельных значений подъемной силы, которая могла бы создаваться крылом постоянной стреловидности с неработающими винтами. Соответственно, крыло постоянной стреловидности не обязательно должно создавать всю подъемную силу, необходимую для уравновешивания массы летательного аппарата во время горизонтального полета, и его размеры могут быть меньше обычных. Крыло малых размеров снижает лобовое сопротивление, испытываемое летательным аппаратом, и делает летательный аппарат более компактным.
Хотя письменное описание настоящего изобретения, представленное выше, позволяет специалисту в данной области техники создать и использовать то, что считается в настоящее время лучшим вариантом его осуществления, специалистам в данной области техники понятна и очевидна возможность существования вариаций, комбинаций и эквивалентов конкретного варианта осуществления настоящего изобретения, способа и примеров, описанных в настоящем документе. Следовательно, настоящее изобретение должно ограничиваться не вариантом его осуществления, способом и примерами, описанными выше, а всеми вариантами осуществления заявленного изобретения и способами в рамках объема и сущности настоящего изобретения согласно прилагаемой формуле.
Номера позиций
| название | год | авторы | номер документа |
|---|---|---|---|
| БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2005 |
|
RU2288140C1 |
| ВИНТОКРЫЛЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ С КРЫЛОМ-СТАБИЛИЗАТОРОМ | 2020 |
|
RU2743306C1 |
| Беспилотный летательный аппарат вертикального взлета и посадки | 2017 |
|
RU2716391C2 |
| ПОВЕРХНОСТЬ ГОРИЗОНТАЛЬНОГО СТАБИЛИЗАТОРА ЛЕТАТЕЛЬНОГО АППАРАТА | 2009 |
|
RU2539308C2 |
| Многоцелевая сверхтяжелая транспортная технологическая авиационная платформа укороченного взлета и посадки | 2019 |
|
RU2714176C1 |
| БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ КОРОТКОГО ВЗЛЕТА И ПОСАДКИ | 2015 |
|
RU2606216C1 |
| Беспилотный летательный аппарат | 2023 |
|
RU2812164C1 |
| ГИДРОСАМОЛЕТ С ЭКРАННЫМ ЭФФЕКТОМ | 2012 |
|
RU2532658C2 |
| БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2010 |
|
RU2424950C1 |
| СИСТЕМА КОНЦЕВЫХ КРЫЛЫШЕК, ЛЕТАТЕЛЬНЫЙ АППАРАТ И СПОСОБ РАБОТЫ ЛЕТАТЕЛЬНОГО АППАРАТА | 2013 |
|
RU2628548C2 |
Изобретение относится к области авиации, в частности к конструкциям винтокрылых летательных аппаратов. Подъемное приспособление (300) в сборе содержит крыло (102) и, по меньшей мере, вертикальный винт (118), расположенный под крылом (102). Вертикальная ось (121) вертикального винта (118) проходит в пределах размаха крыла (102). Вертикальный винт (118) работает во время горизонтального полета летательного аппарата. Расстояние (122) размещения между передней кромкой (108) и вертикальной осью (121) вертикального винта (118) зависит от числа оборотов винта (118) в минуту, угла (116) атаки крыла и хорды (117) крыла. Подъемное приспособление (300) в сборе создает повышенную подъемную силу, превышающую сумму значений подъемной силы, которая генерируется крылом (102) и винтом (118) по отдельности, что позволяет уменьшить размеры крыла и, соответственно, снизить лобовое сопротивление. 3 з.п. ф-лы, 6 ил., 3 табл.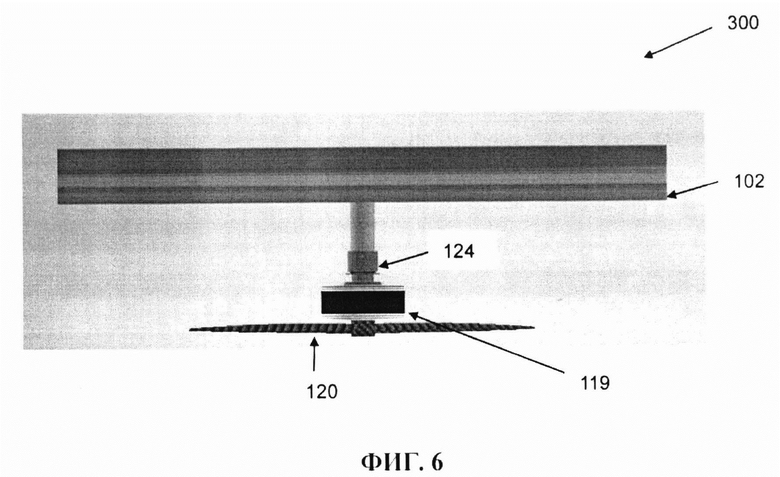
1. Подъемное приспособление (300) в сборе в летательном аппарате, причем это подъемное приспособление (300) в сборе содержит:
крыло (102), содержащее переднюю кромку (108);
по меньшей мере, вертикальный винт (118), расположенный под крылом (102); при этом:
вертикальная ось (121) вертикального винта (118) располагается в пределах размаха крыла (102);
вертикальный винт (118) работает во время горизонтального полета летательного аппарата;
расстояние (122) размещения между передней кромкой (108) и вертикальной осью (121) вертикального винта (118) зависит от числа оборотов в минуту вертикального винта (118), угла (116) атаки крыла и хорды (117) крыла.
2. Подъемное приспособление (300) в сборе по п. 1, в котором:
оптимальное место расположения вертикального винта (118) находится в задней части крыла (102) вдоль центральной оси хорды (117) крыла, обеспечивая максимальную подъемную силу, а
подъемная сила уменьшается по мере смещения положения вертикального винта (118) в сторону от центральной оси хорды (117) крыла.
3. Подъемное приспособление (300) в сборе по п. 1, в котором размещение вертикального винта (118) впереди крыла (102) вблизи передней кромки (108) обеспечивает максимальное уменьшение лобового сопротивления.
4. Подъемное приспособление (300) в сборе по п. 1, в котором подъемная сила повышается линейно при увеличении тяги от 0 до 100%.
| WO 2018075414 A1, 26.04.2018 | |||
| US 5246188 A1, 21.09.1993 | |||
| ПЕРЕДАЧА | 2011 |
|
RU2478847C2 |
| US 20150344134 A1, 03.12.2015 | |||
| СКОРОСТНОЙ ПРЕОБРАЗУЕМЫЙ ВИНТОКРЫЛ | 2015 |
|
RU2609856C1 |

