Настоящее изобретение относится к способу работы кольцевого доильного конвейера (роторной доильной платформы), чтобы максимизировать число животных, подоенных за единицу времени, и изобретение также относится к устройству для управления работой кольцевого доильного конвейера, чтобы максимизировать число животных, подоенных за единицу времени. Дополнительно, изобретение относится к кольцевому доильному конвейеру.
Кольцевые доильные конвейеры обеспечивают непрерывный формат процесса для операции доения для доения коров и других животных, при этом животное, которое должно быть подоено, входит на конвейер, а соответствующее животное, которое было подоено, покидает конвейер с некоторой частотой, соответствующей скорости кольцевого конвейера. Типичные скорости вращения таких доильных конвейеров лежат в диапазоне один оборот за каждые шесть-пятнадцать минут, и в зависимости от числа мест для размещения животных на конвейере животное входит на конвейер в позиции входа, и животное покидает конвейер в позиции выхода с частотой один раз каждые восемь-тридцать секунд. Позиция входа является позицией, в которое каждое животное входит на доильный конвейер, а позиция выхода является позицией, из которой каждое животное покидает доильный конвейер. В целом, число позиций, через которые каждое место для размещения животного, и, в свою очередь, животное на месте для размещения животного, перемещается между и включают в себя позицию входа и позицию выхода, равно числу мест для размещения животных на доильном конвейере, при условии, что позиция входа и позиция выхода на и с конвейера находятся бок о бок. Хотя, на некоторых кольцевых доильных конвейерах до трех позиций конвейера допускаются для выхода каждого животного с доильного конвейера, для того, чтобы предоставлять достаточно времени для выхода задом с соответствующего местоположения для размещения животного.
В течение одного оборота конвейера каждое животное предварительно обрабатывается, что может включать в себя осмотр сосков животного, очистку сосков, и первая порция выдавливаемого молока из животного также может быть проверена. Доильные стаканы доильного аппарата затем присоединяются к соскам животного. По завершении доения доильный аппарат убирается от сосков животного и, наконец, обработка после доения может быть применена, прежде чем животное покидает конвейер. Предварительная обработка, присоединение доильного аппарата, отсоединение доильного аппарата и пост-обработка обычно являются согласованными для данного доильного зала или оператора, и являются постоянными для каждого животного, если дополнительное исследование или обработка, получающаяся в результате, например, травмы или инфекции, не требуется. В то время как, с другой стороны, фактическое время доения для животных может изменяться значительно между отдельными животными. Фактически, в некоторых случаях, когда дополнительная обработка или обследование требуется, может быть необходимо останавливать доильный конвейер до тех пор, пока соответствующее действие не будет предпринято.
Суммарное время доения зависит от угловой скорости кольцевого конвейера, которая может регулироваться оператором в более быструю или более медленную сторону. Если оператор задает угловую скорость доильного конвейера слишком быстрой, некоторые из животных не будут полностью подоены за один оборот конвейера и будут двигаться вокруг доильного конвейера в течение второго его оборота. Если эти животные заканчивают дойку чуть позже выхода с доильного конвейера, тогда дополнительное молоко не будет собрано с этого места для размещения животного конвейера в течение оставшейся доли оборота доильного конвейера. Если оператор задает угловую скорость конвейера слишком медленной, общее время доения будет увеличиваться, и некоторые животные могут заканчивать доение гораздо раньше времени, которое занимает у доильного конвейера выполнение одного оборота. Это также снижает использование каждого места для размещения животного на доильном конвейере. Однако, является невозможным для оператора легко определять значение угловой скорости, в которое доильный конвейер должен быть установлен, которое приведет в результате к минимальному общему времени доения всех животных в стаде.
Следовательно, существует необходимость в способе для управления кольцевым доильным конвейером для того, чтобы максимизировать число животных, подоенных за единицу времени, и также существует необходимость в устройстве для управления работой кольцевого доильного конвейера для того, чтобы максимизировать число животных, подоенных за единицу времени на доильном конвейере.
Настоящее изобретение направлено на предоставление такого способа и устройства, и изобретение также направлено на предоставление кольцевого доильного конвейера.
Согласно изобретению предоставляется способ для работы кольцевого доильного конвейера, чтобы максимизировать число животных, подоенных за единицу времени на конвейере, конвейер, содержащий множество мест для размещения животных, размещенных круговым образом по конвейеру, и каждое место для размещения животного конфигурируется, чтобы проходить через P позиций между и включающих в себя позицию входа, в которой в соответствующие места для размещения животных последовательно входят животные, и позицию выхода, в которой из соответствующих мест для размещения животных последовательно выходят животные во время каждого оборота конвейера, способ содержит вычисление оптимальной угловой скорости конвейера, чтобы максимизировать число животных, подоенных за единицу времени, как функцию исторических данных для каждого из животных, находящихся в настоящий момент на конвейере, исторические данные содержат, по меньшей мере, одно из исторического времени доения для каждого сеанса доения, чтобы подоить каждое из животных, находящихся в настоящий момент на конвейере, и исторического надоя молока каждого сеанса доения для каждого из животных, находящихся в настоящий момент на конвейере.
В одном варианте осуществления изобретения оптимальную угловую скорость конвейера вычисляют в качестве функции текущей угловой скорости конвейера. Предпочтительно, оптимальная угловая скорость вычисляется в качестве функции множества соответствующих различных значений угловой скорости конвейера.
В другом варианте осуществления изобретения оптимальную угловую скорость конвейера вычисляют в качестве функции текущей позиции каждого животного, находящегося в настоящий момент на конвейере, от начальной позиции, являющейся позицией конвейера, в которой это животное вошло на конвейер.
Предпочтительно, способ дополнительно содержит вычисление прогнозируемой финишной позиции для каждого животного, находящегося в настоящий момент на конвейере, в которой доение этого животного, как прогнозируется, должно быть закончено.
Преимущественно, прогнозируемая финишная позиция каждого животного, находящегося в настоящий момент на конвейере, вычисляется в качестве функции текущей позиции этого животного на конвейере.
В одном варианте осуществления изобретения прогнозируемая финишная позиция каждого животного, находящегося в настоящий момент на конвейере, вычисляется в качестве функции исторических данных этого животного.
В другом варианте осуществления изобретения прогнозируемая финишная позиция каждого животного, находящегося в настоящий момент на конвейере, вычисляется в качестве функции по меньшей мере одного из исторического времени доения для каждого сеанса доения, чтобы подоить это животное, и исторического надоя молока для каждого сеанса доения для этого животного.
В одном варианте осуществления изобретения прогнозируемая финишная позиция каждого животного, находящегося в настоящий момент на конвейере, вычисляется в качестве функции времени доения предыдущего сеанса доения для этого животного на конвейере.
Предпочтительно, прогнозируемая финишная позиция каждого животного, находящегося в настоящий момент на конвейере, вычисляется в качестве функции времени доения предыдущего сеанса доения для этого животного во время дня, соответствующее времени дня текущего сеанса доения для этого животного. Преимущественно, прогнозируемая финишная позиция каждого животного, находящегося в настоящий момент на конвейере, вычисляется в качестве функции текущего надоя молока для этого животного на конвейере.
В одном варианте осуществления изобретения прогнозируемая финишная позиция для каждого животного, находящегося в настоящий момент на конвейере, вычисляется в качестве функции прогнозируемого финишного времени, в которое доение этого животного, как прогнозируется, должно быть закончено.
В другом варианте осуществления изобретения прогнозируемое финишное время для каждого животного, находящегося в настоящий момент на конвейере, вычисляется в качестве функции текущей позиции этого животного на конвейере. Предпочтительно, прогнозируемое финишное время для каждого животного, находящегося в настоящий момент на конвейере, вычисляется в качестве функции исторических данных этого животного.
Преимущественно, прогнозируемое финишное время для каждого животного, находящегося в настоящий момент на конвейере, вычисляется в качестве функции по меньшей мере исторического времени доения для каждого сеанса доения, чтобы подоить это животное, и исторического надоя молока каждого сеанса доения для этого животного.
В одном варианте осуществления изобретения прогнозируемое финишное время для каждого животного, находящегося в настоящий момент на конвейере, вычисляется в качестве функции времени доения этого животного для предыдущего сеанса доения этого животного на конвейере.
В другом варианте осуществления изобретения прогнозируемое финишное время для каждого животного, находящегося в настоящий момент на конвейере, вычисляется в качестве функции времени доения для предыдущего сеанса доения этого животного во время дня, соответствующее времени дня текущего сеанса доения этого животного.
В другом варианте осуществления изобретения прогнозируемое финишное время для каждого животного, находящегося в настоящий момент на конвейере, вычисляется в качестве функции текущего надоя молока этого животного на конвейере.
Предпочтительно, прогнозируемое финишное время для каждого животного, находящегося в настоящий момент на конвейере, вычисляется в качестве функции времени, за которое это животное было подоено на конвейере, и непосредственно ранее вычисленного прогнозируемого финишного времени.
В одном варианте осуществления изобретения прогнозируемое финишное время для каждого животного, находящегося в настоящий момент на конвейере, вычисляется в качестве функции разницы между текущим прогнозируемым финишным временем для этого животного и временем, за которое это животное было подоено на конвейере. Предпочтительно, прогнозируемое финишное время для каждого животного, находящегося в настоящий момент на конвейере, вычисляется в качестве функции текущей позиции этого животного на конвейере и произведения текущей угловой скорости конвейера и разницы текущего прогнозируемого финишного времени для этого животного и времени, за которое этот животное было подоено на конвейере.
В одном варианте осуществления изобретения оптимальную угловую скорость конвейера вычисляют в качестве функции вычисленной прогнозируемой финишной позиции каждого животного, находящегося в настоящий момент на конвейере.
В другом варианте осуществления способ дополнительно содержит вычисление непродуктивного периода для каждого животного, находящегося в настоящий момент на конвейере, являющегося периодом, в течение которого животное будет оставаться на конвейере от прогнозируемой финишной позиции этого животного до одной из позиции выхода с конвейера для этого животного и идеальной финишной позиции для этого животного.
Предпочтительно, непродуктивный период для каждого животного, находящегося в настоящий момент на конвейере, вычисляется в качестве функции разницы между одной из позиции выхода с конвейера для этого животного и идеальной финишной позиции для этого животного и прогнозируемой финишной позицией конвейера для этого животного.
Преимущественно, суммарное значение непродуктивных периодов для соответствующих животных, находящихся в настоящий момент на конвейере, вычисляется. В идеале, суммарное значение непродуктивных периодов соответствующих животных, находящихся в настоящий момент на конвейере, вычисляется посредством суммирования непродуктивных периодов соответствующих животных, находящихся в настоящий момент на конвейере.
Предпочтительно, оптимальная угловая скорость конвейера определяется как значение угловой скорости конвейера, при которой итоговое значение суммы непродуктивных периодов соответствующих животных, находящихся в настоящий момент на конвейере, минимизируется.
В одном варианте осуществления изобретения множество итоговых значений суммы непродуктивных периодов соответствующих животных, находящихся в настоящий момент на конвейере, вычисляются для соответствующих различных значений угловой скорости конвейера.
В одном варианте осуществления изобретения соответствующие вычисленные итоговые значения суммы непродуктивных периодов соответствующих животных, находящихся в настоящий момент на конвейере, для соответствующих различных значений угловой скорости конвейера сравниваются друг с другом, и значение угловой скорости, которое приводит в результате к минимальному значению вычисленных итоговых значений непродуктивных периодов соответствующих животных, находящихся в настоящий момент на конвейере, определяется как оптимальная угловая скорость для конвейера.
Предпочтительно, значения итогового значения суммы непродуктивных периодов для соответствующих животных, находящихся в настоящий момент на конвейере, вычисляются для каждого значения угловой скорости конвейера в качестве функции суммы текущей позиции каждого животного на конвейере и произведения этого значения угловой скорости конвейера и разности текущего прогнозируемого финишного времени этого животного и времени, за которое это животное было подоено на конвейере.
В одном варианте осуществления изобретения способ дополнительно содержит вычисление числа оборотов конвейера, в течение которых каждое животное, находящееся в настоящий момент на конвейере, должно оставаться на конвейере для того, чтобы минимизировать итоговое число суммы непродуктивных периодов соответствующих животных на конвейере. Предпочтительно, оптимальную угловую скорость конвейера вычисляют в качестве функции вычисленного числа оборотов, в течение которых каждое животное должно оставаться на конвейере для того, чтобы минимизировать итоговое число суммы непродуктивных периодов соответствующих животных на конвейере.
В одном варианте осуществления изобретения доение каждого животного, находящегося в настоящий момент на конвейере, считается начавшимся по одному из присоединения доильного аппарата к соскам этого животного и обнаружения потока молока из доильного аппарата, присоединенного к этому животному.
В другом варианте осуществления изобретения оптимальную угловую скорость конвейера вычисляют каждый раз, когда животное входит на конвейер. Преимущественно, оптимальную угловую скорость конвейера вычисляют каждый раз, когда животное выходит с конвейера.
В другом варианте осуществления изобретения оптимальную угловую скорость конвейера вычисляют каждый раз, когда доение животного на конвейере начинается.
В другом варианте осуществления изобретения оптимальную угловую скорость конвейера вычисляют каждый раз, когда обнаруживается отклонение в надое молока каждого животного на конвейере от исторического надоя молока для этого животного.
В дополнительном варианте осуществления изобретения оптимальную угловую скорость конвейера вычисляют каждый раз, когда обнаруживается отклонение во времени доения каждого животного на конвейере от исторического времени доения для этого животного.
В другом варианте осуществления изобретения оптимальную угловую скорость конвейера вычисляют с предварительно определенными временными интервалами. Предпочтительно, каждый предварительно определенный временной интервал лежит в диапазоне от 0,5 секунды до 60 секунд. Предпочтительно, каждый предварительно определенный временной интервал лежит в диапазоне от 20 секунд до 30 секунд. В идеале, каждый предварительно определенный временной интервал приблизительно равен 25 секунд.
В дополнительном варианте осуществления изобретения оптимальную угловую скорость конвейера вычисляют практически непрерывно.
Предпочтительно, угловая скорость конвейера изменяется каждый раз, когда значение оптимальной угловой скорости конвейера вычисляется, и угловая скорость конвейера изменяется на только что вычисленное значение оптимальной угловой скорости. Преимущественно, угловая скорость конвейера изменяется постепенно, каждый раз, когда угловая скорость конвейера изменяется на только что вычисленное значение оптимальной угловой скорости.
Предпочтительно, исторические данные каждого животного на конвейере взвешиваются по отношению к историческим данным, определенным в течение непосредственно предшествующего предварительно определенного периода времени. Преимущественно, предварительно определенный период времени лежит в диапазоне от 1 дня до 30 дней. Предпочтительно, предварительно определенный период времени лежит в диапазоне от 2 дней до 7 дней. В идеале, предварительно определенный период времени равен приблизительно 5 дням.
В одном варианте осуществления изобретения исторические данные каждого животного, находящегося в настоящий момент на конвейере, взвешиваются по отношению к данным на основе непосредственно предшествующего сеанса доения этого животного на конвейере.
В другом варианте осуществления изобретения исторические данные каждого животного, находящегося в настоящий момент на конвейере, взвешиваются по отношению к данным на основе одного из непосредственно предшествующих сеансов доения во время дня, соответствующее времени текущего сеанса доения этого животного. В дополнительном варианте осуществления изобретения исторические данные каждого животного на конвейере включают в себя данные, относящиеся, по меньшей мере, к одному из стадии лактации этого животного и времени дня (утро или вечер), к которому исторические данные этого животного относятся.
Предпочтительно, исторические данные каждого животного, которое должно быть подоено на конвейере, предоставляются в качестве профиля доения, характерного для этого животного. Преимущественно, профиль доения каждого животного получается из исторических данных доения для этого животного, полученных в течение множества сеансов доения этого животного. Предпочтительно, профиль доения каждого животного определяется кривой, вычерчиваемой по большому числу распределений статистической вероятности, и модель наилучшего соответствия идентифицируется. Преимущественно, профиль доения каждого животного определяется из модели наилучшего соответствия.
Изобретение также предоставляет доильный конвейер, выполненный с возможностью работы под управлением способа согласно изобретению.
Дополнительно изобретение предоставляет кольцевой доильный конвейер, выполненный с возможностью работы в соответствии со способом согласно изобретению, чтобы максимизировать число животных, подоенных за единицу времени на конвейере.
Дополнительно, изобретение предоставляет устройство для работы кольцевого доильного конвейера, чтобы максимизировать число животных, подоенных за единицу времени, устройство содержит сигнальный процессор, сконфигурированный, чтобы выполнять способ согласно изобретению и вычислять оптимальную угловую скорость конвейера в соответствии со способом, чтобы максимизировать число животных, подоенных за единицу времени.
Изобретение также предоставляет устройство для работы кольцевого доильного конвейера, чтобы максимизировать число животных, подоенных за единицу времени, устройство содержит сигнальный процессор, сконфигурированный, чтобы вычислять оптимальную угловую скорость конвейера, чтобы максимизировать число животных, подоенных за единицу времени, как функцию исторических данных каждого из животных, находящихся в настоящий момент на конвейере, исторические данные содержат, по меньшей мере, одно из исторического времени доения для каждого сеанса доения, чтобы подоить каждое из животных, находящихся в настоящий момент на конвейере, и исторического надоя молока для каждого сеанса доения каждого из животных, находящихся в настоящий момент на конвейере.
В одном варианте осуществления изобретения сигнальный процессор конфигурируется, чтобы вычислять оптимальную угловую скорость конвейера как функцию текущей угловой скорости конвейера. Предпочтительно, сигнальный процессор конфигурируется, чтобы вычислять оптимальную угловую скорость как функцию множества соответствующих различных значений угловой скорости конвейера.
В одном варианте осуществления изобретения сигнальный процессор конфигурируется, чтобы вычислять оптимальную угловую скорость конвейера как функцию текущей позиции каждого животного, находящегося в настоящий момент на конвейере, от начальной позиции, являющейся позицией конвейера, в которой это животное вошло на конвейер.
В другом варианте осуществления изобретения сигнальный процессор конфигурируется, чтобы вычислять прогнозируемую финишную позицию для каждого животного, находящегося в настоящий момент на конвейере, в которой доение этого животного, как прогнозируется, должно быть закончено.
В дополнительном варианте осуществления изобретения сигнальный процессор конфигурируется, чтобы вычислять прогнозируемую финишную позицию каждого животного, находящегося в настоящий момент на конвейере, как функцию текущей позиции этого животного на конвейере.
Предпочтительно, сигнальный процессор конфигурируется, чтобы вычислять прогнозируемую финишную позицию каждого животного, находящегося в настоящий момент на конвейере, как функцию исторических данных этого животного.
Преимущественно, сигнальный процессор конфигурируется, чтобы вычислять прогнозируемую финишную позицию каждого животного, находящегося в настоящий момент на конвейере, как функцию, по меньшей мере, одного из исторического времени доения для каждого сеанса доения, чтобы подоить это животное, и исторического надоя молока для каждого сеанса доения этого животного.
В другом варианте осуществления изобретения сигнальный процессор конфигурируется, чтобы вычислять прогнозируемую финишную позицию каждого животного, находящегося в настоящий момент на конвейере, как функцию времени доения предыдущего сеанса доения этого животного на конвейере.
Предпочтительно, сигнальный процессор конфигурируется, чтобы вычислять прогнозируемую финишную позицию каждого животного, находящегося в настоящий момент на конвейере как функцию времени доения предыдущего сеанса доения для этого животного во время дня, соответствующее времени дня текущего сеанса доения для этого животного.
В одном варианте осуществления изобретения сигнальный процессор конфигурируется, чтобы вычислять прогнозируемую финишную позицию каждого животного, находящегося в настоящий момент на конвейере, как функцию текущего надоя молока этого животного на конвейере.
В другом варианте осуществления изобретения сигнальный процессор конфигурируется, чтобы вычислять прогнозируемую финишную позицию для каждого животного, находящегося в настоящий момент на конвейере, как функцию прогнозируемого финишного времени, в которое доение этого животного, как прогнозируется, должно быть закончено.
В другом варианте осуществления изобретения сигнальный процессор конфигурируется, чтобы вычислять прогнозируемое финишное время для каждого животного, находящегося в настоящий момент на конвейере, как функцию текущей позиции этого животного на конвейере.
Предпочтительно, сигнальный процессор конфигурируется, чтобы вычислять прогнозируемое финишное время каждого животного, находящегося в настоящий момент на конвейере, как функцию исторических данных этого животного.
Преимущественно, сигнальный процессор конфигурируется, чтобы вычислять прогнозируемое финишное время для каждого животного, находящегося в настоящий момент на конвейере, как функцию, по меньшей мере, одного из исторического времени доения для каждого сеанса доения, чтобы подоить это животное, и исторического надоя молока для каждого сеанса доения этого животного.
В другом варианте осуществления изобретения сигнальный процессор конфигурируется, чтобы вычислять прогнозируемое финишное время для каждого животного, находящегося в настоящий момент на конвейере, как функцию времени доения этого животного для предыдущего сеанса доения этого животного на конвейере. Предпочтительно, сигнальный процессор конфигурируется, чтобы вычислять прогнозируемое финишное время для каждого животного, находящегося в настоящий момент на конвейере, как функцию времени доения предыдущего сеанса доения этого животного во время дня, соответствующее времени дня текущего сеанса доения этого животного.
В другом варианте осуществления изобретения сигнальный процессор конфигурируется, чтобы вычислять прогнозируемое финишное время для каждого животного, находящегося в настоящий момент на конвейере, как функцию текущего надоя молока этого животного на конвейере.
Предпочтительно, сигнальный процессор конфигурируется, чтобы вычислять прогнозируемое финишное время для каждого животного, находящегося в настоящий момент на конвейере, как функцию времени, за которое это животное было подоено на конвейере, и непосредственно ранее вычисленного прогнозируемого финишного времени.
В другом варианте осуществления изобретения сигнальный процессор конфигурируется, чтобы вычислять прогнозируемое финишное время для каждого животного, находящегося в настоящий момент на конвейере, как функцию разницы между текущим прогнозируемым финишным временем для этого животного и временем, за которое это животное было подоено на конвейере. Предпочтительно, сигнальный процессор конфигурируется, чтобы вычислять прогнозируемое финишное время для каждого животного, находящегося в настоящий момент на конвейере, как функцию текущей позиции этого животного на конвейере и произведения текущей угловой скорости конвейера и разницы текущего прогнозируемого финишного времени для этого животного и времени, за которое это животное было подоено на конвейере.
В одном варианте осуществления изобретения сигнальный процессор конфигурируется, чтобы вычислять оптимальную угловую скорость конвейера, которая вычисляется в качестве функции вычисленной прогнозируемой финишной позиции каждого животного, находящегося в настоящий момент на конвейере.
В другом варианте осуществления изобретения сигнальный процессор конфигурируется, чтобы вычислять непродуктивный период для каждого животного, находящегося в настоящий момент на конвейере, являющийся периодом, в течение которого животное будет оставаться на конвейере от прогнозируемой финишной позиции этого животного до одной из позиции выхода с конвейера для этого животного и идеальной финишной позиции для этого животного.
Предпочтительно, сигнальный процессор конфигурируется, чтобы вычислять непродуктивный период для каждого животного, находящегося в настоящий момент на конвейере, как функцию разницы между одной из позиции выхода с конвейера для этого животного и идеальной финишной позиции для этого животного и прогнозируемой финишной позицией конвейера для этого животного.
Предпочтительно, сигнальный процессор конфигурируется, чтобы вычислять итоговое значение непродуктивных периодов для соответствующих животных, находящихся в настоящий момент на конвейере. Преимущественно, сигнальный процессор конфигурируется, чтобы вычислять итоговое значение непродуктивных периодов соответствующих животных, находящихся в настоящий момент на конвейере, посредством суммирования непродуктивных периодов соответствующих животных, находящихся в настоящий момент на конвейере.
В одном варианте осуществления изобретения сигнальный процессор конфигурируется, чтобы определять оптимальную угловую скорость конвейера как значение угловой скорости конвейера, при которой итоговое значение суммы непродуктивных периодов соответствующих животных, находящихся в настоящий момент на конвейере, минимизируется.
Предпочтительно, сигнальный процессор конфигурируется, чтобы вычислять множество итоговых значений суммы непродуктивных периодов соответствующих животных, находящихся в настоящий момент на конвейере, для различных значений угловой скорости конвейера. Преимущественно, сигнальный процессор конфигурируется, чтобы сравнивать соответствующие вычисленные итоговые значения суммы непродуктивных периодов соответствующих животных, находящихся в настоящий момент на конвейере, для различных значений угловой скорости конвейера друг с другом и определять значение угловой скорости, которое приводит в результате к минимальному значению вычисленных итоговых значений непродуктивных периодов соответствующих животных, находящихся в настоящий момент на конвейере, как оптимальную угловую скорость для конвейера.
Предпочтительно, сигнальный процессор конфигурируется, чтобы вычислять значения итогового значения суммы непродуктивных периодов для соответствующих животных, находящихся в настоящий момент на конвейере, для каждого значения угловой скорости конвейера как функцию суммы текущей позиции каждого животного на конвейере и произведения этого значения угловой скорости конвейера и разности текущего прогнозируемого финишного времени этого животного и времени, за которое это животное было подоено на конвейере.
В одном варианте осуществления изобретения сигнальный процессор конфигурируется, чтобы вычислять число оборотов конвейера, в течение которых каждое животное, находящееся в настоящий момент на конвейере, должно оставаться на конвейере для того, чтобы минимизировать итоговое значение суммы непродуктивных периодов соответствующих животных на конвейере. Преимущественно, сигнальный процессор конфигурируется, чтобы вычислять оптимальную угловую скорость конвейера как функцию вычисленного числа оборотов, в течение которых каждое животное должно оставаться на конвейере для того, чтобы минимизировать итоговое значение суммы непродуктивных периодов соответствующих животных на конвейере.
В другом варианте осуществления изобретения сигнальный процессор конфигурируется, чтобы считать доение каждого животного, находящегося в настоящий момент на конвейере, начавшимся по одному из присоединения доильного аппарата к соскам этого животного и обнаружения потока молока из доильного аппарата, присоединенного к этому животному.
Предпочтительно, сигнальный процессор конфигурируется, чтобы вычислять оптимальную угловую скорость конвейера каждый раз, когда животное входит на конвейер. Преимущественно, сигнальный процессор конфигурируется, чтобы вычислять оптимальную угловую скорость конвейера каждый раз, когда животное выходит с конвейера.
В одном варианте осуществления изобретения сигнальный процессор конфигурируется, чтобы вычислять оптимальную угловую скорость конвейера каждый раз, когда доение животного на конвейере начинается.
В другом варианте осуществления изобретения сигнальный процессор конфигурируется, чтобы вычислять оптимальную угловую скорость конвейера каждый раз, когда обнаруживается отклонение в надое молока каждого животного на конвейере от исторического надоя молока для этого животного.
В дополнительном варианте осуществления изобретения сигнальный процессор конфигурируется, чтобы вычислять оптимальную угловую скорость конвейера каждый раз, когда обнаруживается отклонение во времени доения каждого животного на конвейере от исторического времени доения этого животного.
В одном варианте осуществления изобретения сигнальный процессор конфигурируется, чтобы вычислять оптимальную угловую скорость конвейера с предварительно определенными интервалами.
В дополнительном варианте осуществления изобретения сигнальный процессор конфигурируется, чтобы вычислять оптимальную угловую скорость конвейера практически непрерывно.
В другом варианте осуществления изобретения сигнальный процессор конфигурируется, чтобы изменять угловую скорость конвейера каждый раз, когда значение оптимальной угловой скорости конвейера вычисляется, и изменять угловую скорость конвейера на только что вычисленное значение оптимальной угловой скорости. Предпочтительно, сигнальный процессор конфигурируется, чтобы изменять угловую скорость конвейера постепенно, каждый раз, когда угловая скорость конвейера изменяется на только что вычисленное значение оптимальной угловой скорости.
В другом варианте осуществления изобретения сигнальный процессор конфигурируется, чтобы взвешивать исторические данные каждого животного на конвейере по отношению к историческим данным, определенным в течение непосредственно предшествующего предварительно определенного периода времени.
Предпочтительно, сигнальный процессор конфигурируется, чтобы взвешивать исторические данные каждого животного, находящегося в текущий момент на конвейере, по отношению к историческим данным на основе одного из непосредственно предшествующего сеанса доения этого животного на конвейере.
Преимущественно, сигнальный процессор конфигурируется, чтобы взвешивать исторические данные каждого животного, находящегося в настоящий момент на конвейере, по отношению к историческим данным на основе одного из непосредственно предшествующих сеансов доения во время дня, соответствующее времени текущего сеанса доения этого животного.
Предпочтительно, исторические данные каждого животного на конвейере включают в себя данные, относящиеся, по меньшей мере, к одному из стадии лактации животного и времени дня (утро или вечер), к которому исторические данные этого животного относятся.
Изобретение также предоставляет кольцевой доильный конвейер, содержащий устройство согласно изобретению для управления работой конвейера, чтобы максимизировать число животных, подоенных за единицу времени.
Преимуществ изобретения много. Особенно важным преимуществом изобретения является то, что способ и устройство согласно изобретению предоставляют возможность максимизации числа животных, подоенных за единицу времени на доильном конвейере. Это достигается посредством того факта, что угловая скорость конвейера регулярно обновляется до оптимальной угловой скорости, которая максимизирует число животных, подоенных за единицу времени, на основе животных, находящихся в текущий момент на конвейере. Посредством вычисления оптимальной угловой скорости для конвейера каждый раз, когда животное входит на конвейер, число животных, подоенных за единицу времени, максимизируется.
Посредством максимизации числа животных, подоенных за единицу времени на конвейере, суммарное время доения, чтобы подоить заданный размер стада, может быть значительно уменьшено. Таким образом, в случае относительно больших стад, размер и число доильных конвейеров может быть уменьшено, что также является значительным преимуществом.
Изобретение будет более ясно понято из последующего описания предпочтительного варианта его осуществления, которое предоставляется только в качестве неограничивающего примера со ссылкой на сопровождающий чертеж, на котором:
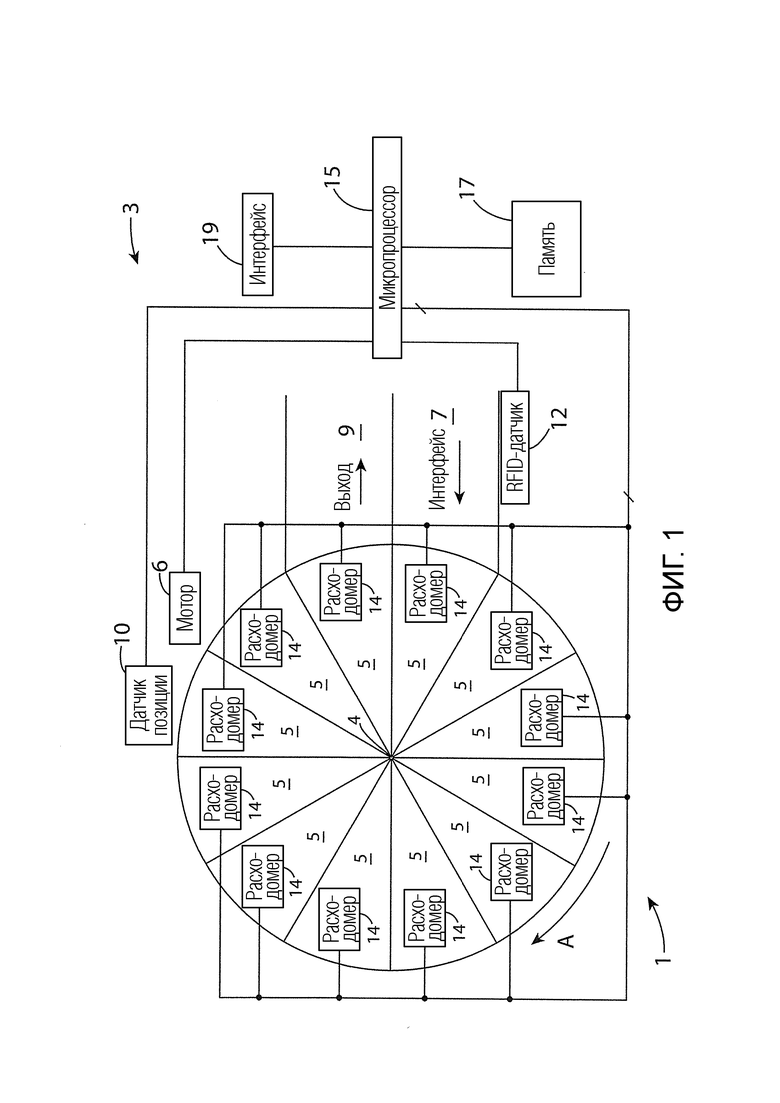
Фиг.1 является блок-схемой кольцевого доильного конвейера согласно изобретению и устройства также согласно изобретению для выполнения способа также согласно изобретению для работы кольцевого доильного конвейера, чтобы максимизировать число животных, подоенных на конвейере.
Обращаясь к чертежу, иллюстрируется кольцевой доильный конвейер согласно изобретению, указанный, в целом, ссылочным номером 1. Кольцевой доильный конвейер 1 содержит устройство также согласно изобретению, указанное, в целом, ссылочным номером 3 для выполнения способа согласно изобретению для работы кольцевого доильного конвейера 1 для того, чтобы максимизировать число животных, подоенных за единицу времени, в этом случае, число животных, подоенных за час. Кольцевой доильный конвейер 1 устанавливается с возможностью вращения вокруг вертикальной центральной главной оси 4 вращения и содержит множество мест 5 размещения животных для размещения соответствующих животных на конвейере 1 во время их доения. Любое число мест 5 для размещения животных может быть предусмотрено, однако, типично число мест для размещения животных может быть в диапазоне от двадцати до ста двадцати и даже выше. В этом варианте осуществления изобретения, для удобства, конвейер 1 иллюстрируется как содержащий двенадцать мест 5 для размещения животных. Мотор 6 с переменной скоростью, который иллюстрируется только в виде блочного представления, вращает конвейер вокруг главной оси 4 вращения в направлении стрелки A.
Вход 7 предусматривается на доильный конвейер 1, через который животные входят в места 5 размещения животных последовательно, когда конвейер 1 вращается вокруг главной оси 4 вращения в направлении стрелки A мимо входа 7. Вход 7 также будет называться в данном документе позицией 7 входа. Выход 9 с конвейера 1 предусматривается для размещения животных последовательно из мест 5 для размещения животных, когда конвейер 1 вращается в направлении стрелки A мимо выхода 9. Выход 9 также будет называться в данном документе позицией 9 выхода. В этом варианте осуществления изобретения, и, в целом, в таких кольцевых доильных конвейерах, выход 9 располагается рядом с входом 7, так что число P позиций, через которые каждое место 5 для размещения животного, и, в свою очередь, каждое животное на одном из мест 5 для размещения животных проходит между и включает в себя позицию 7 входа и позицию 9 выхода при каждом обороте конвейера 1, равно числу мест 5 для размещения животных на конвейере 1, предполагая, что угловая ширина каждой позиции равна угловой ширине каждого из мест 5 для размещения животных. Однако в целом, для того чтобы более легко предоставлять возможность животным выходить с конвейера через выход 9, поскольку животные должны выходить задом с соответствующих мест для размещения животных, выход 9 может быть шире входа 7, и типично может быть таким широким как три места для размещения животных.
Датчик 10 позиции, который иллюстрируется в блочном представлении, непосредственно наблюдает за вращением конвейера 1 и формирует сигналы, указывающие позицию конвейера 1 относительно точки отсчета, в этом варианте осуществления изобретения - позиции 7 входа.
Средство для идентификации каждого животного, когда оно проходит через вход 7 на конвейер 1, в этом варианте осуществления изобретения содержит элемент 12 RFID-датчика, который располагается рядом с входом 7 на места 5 для размещения животных конвейера 1. Каждое животное из стада животных, которое должно быть подоено на кольцевом доильном конвейере 1, снабжается надлежащей идентификационной меткой, которая в этом варианте осуществления изобретения содержит ушную бирку. Ушные бирки снабжаются соответствующими электронно-считываемыми уникальными идентификационными кодами для идентификации соответствующих животных. Элемент 12 RFID-датчика считывает коды с соответствующих ушных бирок, когда животные последовательно входят на места 5 для размещения животных через вход 7.
Каждое место 5 для размещения животного снабжается доильным аппаратом (не показан) для присоединения к соскам животного для его доения. Молоко всасывается традиционным способом из доильных аппаратов и доставляется в бак для хранения сборного молока (не показан). Молоко из каждого доильного аппарата всасывается через соответствующий расходомер 14, иллюстрированный в блочном представлении, для непрерывного наблюдения расхода молока, всасываемого из животного на соответствующем месте 5 для размещения животного. Расходомеры 14 формируют электронные сигналы, указывающие наблюдаемый расход молока от соответствующих животных на соответствующих местах 5 для размещения животных.
Доильный конвейер 1, описываемый до сих пор, будет известен специалистам в области техники, и дополнительное подробное описание кольцевого доильного конвейера 1 не должно потребоваться.
Обращаясь теперь к устройству 3 для выполнения способа согласно изобретению для работы кольцевого доильного конвейера 1 для того, чтобы максимизировать число животных, подоенных за час, устройство 3 содержит сигнальный процессор, который в этом варианте осуществления изобретения предоставляется посредством микропроцессора 15. Микропроцессор 15 программируется, чтобы управлять работой кольцевого доильного конвейера 1 и управлять мотором 6 и его скоростью для управления, в свою очередь, угловой скоростью конвейера 1, так что конвейер 1 вращается вокруг главной оси 4 вращения с оптимальной угловой скоростью для максимизации числа животных, подоенных за час на конвейере 1, как будет описано ниже.
Микропроцессор 15 считывает сигналы с RFID-датчика 12 для идентификации каждого животного, когда животное входит на место 5 размещения животного на конвейере 1. Микропроцессор 15 программируется, чтобы создавать перекрестную ссылку идентичности каждого животного с идентичностью места для размещения животного, на котором это животное находится. Идентичность каждого животного, имеющая перекрестную ссылку с идентичностью места для размещения животного, на котором животное находится, сохраняется в памяти, которая может быть памятью микропроцессора 15 или электронной памятью 17, с которой микропроцессор 15 находится на связи. С целью описания этого варианта осуществления изобретения предполагается, что идентичность каждого животного, имеющего перекрестную ссылку с соответствующим местом 5 для размещения животного, хранится в памяти 17.
Микропроцессор 15 также программируется, чтобы считывать сигналы с расходомеров 14 соответствующих мест 5 для размещения животных и вычислять надой молока от каждого животного от начала доения этого животного. Надои молока соответствующих животных на конвейере 1 постоянно обновляются и сохраняются с перекрестной ссылкой с идентичностью животного в памяти 17.
Микропроцессор 15 также программируется, чтобы непрерывно считывать сигналы с датчика 10 позиции. Микропроцессор 15 программируется, чтобы определять из сигналов, считанных с датчика 10 позиции, текущую угловую позицию каждого животного на конвейере 1, которая является угловым расстоянием, на которое конвейер 1 повернулся, после того как животное вошло на конвейер 1. Текущая угловая позиция каждого животного на конвейере 1 является такой же, что и текущая угловая позиция места 5 для размещения животного, на котором животное находится, и, следовательно, текущая угловая позиция этого животного на конвейере 1 является равной углу, на который место 5 для размещения животного, на котором животное находится, переместилось, после того как это животное вошло на это место 5 для размещения животного. Для удобства позиция каждого места 5 для размещения животного, когда животное входит на это место 5 для размещения животного на входе 7, называется начальной позицией для этого места для размещения животного, и, в свою очередь, этого животного. Соответственно, микропроцессор 15 определяет из сигналов, считанных с датчика 10 позиции, начальную позицию каждого места 5 для размещения животного, из угловой позиции конвейера 1, когда это место 5 для размещения животного выравнивается с входом 9. Микропроцессор 15 определяет текущую угловую позицию каждого места 5 для размещения животного, и, в свою очередь, текущую угловую позицию каждого животного на конвейере 1, суммируя угловое расстояние, пройденное этим местом 5 для размещения животного, с угловой позицией конвейера 1, когда это место 5 для размещения животного было в начальной позиции. Текущая угловая позиция каждого животного и соответствующее место 5 для размещения животного от соответствующей начальной позиции постоянно обновляется, и сохраняется в памяти 17 и снабжается перекрестной ссылкой с идентичностью соответствующего животного.
Микропроцессор 15 также программируется, чтобы определять из сигналов, считанных из датчика 10 позиции и из расходомеров 14, угловую позицию каждого животного на конвейере 1, когда доение этого животного начинается. Микропроцессор 15 программируется, чтобы определять начало доения животного по сигналам, считанным с расходомера 14, соответствующего месту 5 для размещения животного, на котором это животное находится, указывающим начало течения молока. При определении микропроцессором 15 начала доения этого животного, микропроцессор 15 определяет угловую позицию этого животного на конвейере 1 по началу его доения посредством определения угловой позиции места 5 для размещения животного, на котором это животное находится, от его начальной позиции. Микропроцессор 15 сохраняет угловую позицию в начале доения каждого животного в памяти 17, снабженную перекрестной ссылкой с идентичностью соответствующего животного.
Микропроцессор 15 программируется, чтобы вычислять оптимальную угловую скорость конвейера 1 для максимизации числа животных, подоенных за час на конвейере 1, на основе исторических данных, относящихся к каждому животному на конвейере. Исторические данные для каждого из животных из стада животных, которые должны быть подоены на конвейере 1, сохраняются в памяти 17 и снабжаются перекрестной ссылкой с идентичностью соответствующего животного. В этом варианте осуществления изобретения исторические данные хранятся как профиль доения, характерный для каждого животного, и содержат историческое время доения для каждого сеанса доения каждого животного из стада животных и исторический надой молока для каждого сеанса доения каждого животного из стада. Историческое время доения для каждого сеанса каждого животного и исторический надой молока для каждого сеанса доения каждого животного предоставляются отдельно для каждого из сеансов доения за день, например, в случаях, когда животные доятся дважды в день, утром и вечером, историческое время доения для каждого сеанса и исторический надой молока для каждого сеанса доения будут сохранены для каждого животного отдельно для утреннего сеанса и вечернего сеанса. Если животные были подоены более чем дважды в день, эти данные будут предоставлены отдельно для каждого из трех или более сеансов доения за день. Дополнительно, исторические данные включают в себя стадию лактации каждого животного. Время последнего сеанса доения, когда каждое животное было подоено, также сохраняется в памяти 17.
Исторические данные соответствующих животных могут быть первоначально введены вручную в микропроцессор 15 и сохранены в памяти 17 через подходящий интерфейс 19, который может содержать клавиатуру, сенсорный экран или т.п. Альтернативно, интерфейс 19 может содержать подходящее соединение для соединения микропроцессора 15 с компьютером для загрузки исторических данных с компьютера в память 17. Исторические данные могут дополнительно или альтернативно быть получены из множества сеансов доения соответствующих животных стада на доильном конвейере 1. После того как исторические данные были первоначально сохранены в памяти 17, исторические данные непрерывно обновляются для соответствующих животных после каждого сеанса доения на конвейере 1 на основе характеристик доения соответствующих животных во время этого сеанса доения. Для того, чтобы улучшать точность, с которой оптимальная угловая скорость для конвейера 1 вычисляется, исторические данные для соответствующих животных взвешиваются по отношению к более новой характеристике доения соответствующих животных, и, типично, исторические данные для соответствующих животных взвешиваются по отношению к характеристике доения соответствующих животных в течение предыдущих трех-семи дней.
В этом варианте осуществления изобретения микропроцессор 15 программируется, чтобы вычислять новую оптимальную угловую скорость для конвейера 1 каждый раз, когда животное входит на конвейер 1, и по новой вычисленной оптимальной угловой скорости микропроцессор 15 управляет мотором 6 с переменной скоростью, чтобы изменять угловую скорость конвейера 1 на только что вычисленную оптимальную угловую скорость.
Перед описанием подробно того, как оптимальная угловая скорость для конвейера вычисляется, краткое изложение в общих чертах способа для определения оптимальной угловой скорости конвейера 1 будет сначала описано.
Когда каждое животное входит на конвейер 1, микропроцессор 15 идентифицирует животное из сигналов, считанных из элемента 12 RFID-датчика, и связывает перекрестной ссылкой идентичность животного с номером места 5 для размещения животного, на которое вошло животное, так что это животное может отслеживаться во время его доения на конвейере 1. Микропроцессор 15 программируется так, что каждый раз, когда животное входит на конвейер 1, микропроцессор 15 вычисляет оптимальную угловую скорость конвейера 1 для того, чтобы максимизировать число животных, подоенных за единицу времени, а именно, подоенных за час на конвейере 1. Дополнительно, микропроцессор 15 также программируется, чтобы вычислять оптимальную угловую скорость конвейера 1 для того, чтобы максимизировать число животных, подоенных за час на конвейере, когда каждое животное выходит с конвейера 1, и, в частности, где животное выходит с конвейера, и животное не входит на конвейер в этой позиции конвейера, которая только что освободилась.
Для того, чтобы определять оптимальную угловую скорость конвейера, микропроцессор 15 программируется, чтобы первоначально вычислять прогнозируемую финишную позицию для каждого животного на конвейере 1, другими словами, угловую позицию в радианах для места 5 размещения животного для того животного, в которой доение этого животного, как прогнозируется, должно быть закончено. Прогнозируемая финишная позиция для каждого животного вычисляется на основе текущей угловой позиции этого животного на конвейере 1 и по историческим данным для этого животного для сеанса доения дня, соответствующего текущему времени доения, а также на основе надоя молока этого животного от начала доения до текущей угловой позиции этого животного на конвейере 1, и времени, за которое это животное было подоено от начала доения до текущей угловой позиции этого животного на конвейере 1. После вычисления прогнозируемой финишной позиции для каждого животного микропроцессор 15 программируется, чтобы затем вычислять непродуктивный период в радианах для каждого животного на конвейере 1 от спрогнозированной финишной позиции до идеальной финишной позиции. Идеальная финишная позиция каждого животного является угловой позицией конвейера, в которой доение этого животного должно быть закончено для того, чтобы предоставлять достаточно времени для снятия доильного аппарата с сосков этого животного и для какой-либо пост-обработки для обработки сосков этого животного, прежде чем это животное достигает позиции 9 выхода. Непродуктивный период для каждого животного является периодом, в течение которого это животное будет оставаться на конвейере от спрогнозированной финишной позиции до идеальной финишной позиции этого животного, и в течение которого молоко не будет собираться от этого животного. Непродуктивный период для каждого животного вычисляется вычитанием угла спрогнозированной финишной позиции из угла идеальной финишной позиции, оба на основе начальной позиции места 5 для размещения животного, на котором это животное располагается. Первоначально, спрогнозированные финишные позиции для каждого животного вычисляются на основе текущей угловой скорости конвейера. Вычисленная спрогнозированная финишная позиция для некоторых животных на конвейере будет завершаться прежде идеальной финишной позиции, а некоторые могут завершаться после идеальной финишной позиции, и могут протягиваться за 2π радиан от начальной позиции для этого животного, что приведет в результате к тому, что животное должно оставаться на конвейере в течение дополнительного оборота конвейера 1.
Когда непродуктивные периоды для каждого из животных на конвейере 1 были вычислены, непродуктивные периоды в радианах суммируются, чтобы предоставлять итоговое значение непродуктивных периодов для текущей угловой скорости конвейера. Микропроцессор 15 программируется, чтобы затем вычислять множество итоговых значений суммы непродуктивных периодов для животных на конвейере для множества различных значений угловой скорости конвейера. Микропроцессор 15 затем сравнивает соответствующие итоговые значения суммы непродуктивных периодов животных на конвейере 1 для различных значений угловой скорости конвейера, и значение угловой скорости конвейера, которое приводит в результате к минимальному значению для итоговых значений суммы непродуктивных периодов для животных на конвейере, определяется микропроцессором 15 как оптимальная угловая скорость.
После определения оптимальной угловой скорости для конвейера 1 микропроцессор 15 затем управляет скоростью мотора 6, чтобы постепенно изменять угловую скорость конвейера 1 на только что определенную оптимальную угловую скорость.
В целом, является желательным, что на основе вновь определенной оптимальной угловой скорости конвейера прогнозируемые финишные позиции большинства животных будут возникать непосредственно перед идеальной финишной позицией. Однако, если прогнозируемые финишные позиции некоторых животных должны возникать после идеальной финишной позиции, тогда эти животные с такими спрогнозированными финишными позициями будут оставаться на конвейере в течение дополнительного оборота конвейера.
В целом, в зависимости от числа мест для размещения животных на конвейере, и угловой скорости конвейера, со времени, когда животное входит на конвейер через позицию 7 входа, другими словами от начальной позиции этого животного, до времени, когда доильный аппарат был присоединен к этому животному, конвейер может пройти через три-восемь позиций конвейера. Таким образом, множество животных на доильном конвейере, когда оптимальную угловую скорость конвейера вычисляют, не будут начинать доиться. В порядке, в котором прогнозируемая финишная позиция может быть вычислена для каждого из таких животных, для которых доильные аппараты еще не были присоединены, доильные аппараты, как предполагается, должны присоединяться к таким животным в предварительно определенной угловой позиции. Типично, предварительно определенная позиция будет позицией, в которой ожидается, что доильный аппарат будет присоединен к животному, и который, в свою очередь, будет усредненной позицией, в которой доильные аппараты обычно присоединяются к животным. Прогнозируемая финишная позиция для каждого из этих животных вычисляется на основе этой предварительно определенной позиции, которая будет также считаться позицией соответственного животного на конвейере, в которой доение этого животного начнется. Однако после того как сигналы, считанные микропроцессором 15 с соответствующего одного из расходомеров 14, указывают начало доения этого животного, прогнозируемая финишная позиция для этого животного затем вычисляется на основе угловой позиции места 5 размещения животного для этого животного, в которой начало доения этого животного произошло.
Способ для определения оптимальной угловой скорости для конвейера, который микропроцессор 15 программируется выполнять, будет сейчас описан более подробно. Первоначально подготавливается целевая функция, которая может быть использована в вычислении оптимальной угловой скорости конвейера микропроцессором 15 для того, чтобы максимизировать число животных, подоенных за единицу времени на конвейере. Существуют два ключевых этапа, подразумеваемых в общей оптимизации системы, статистический анализ исторических данных и разработка алгоритма оптимизации на основе динамических характеристик конвейера 1.
Первоначально исторические данные для всех животных в стаде анализируются, чтобы разрабатывать профили доения, характерные для каждого животного. Эти данные, как обсуждалось выше, включают в себя надой молока для каждого сеанса доения и время доения для каждого сеанса доения для каждого животного стада в течение множества сеансов доения, например, в течение предварительно определенного периода в диапазоне, например, от 1 до 30 дней, а предпочтительно, в диапазоне от 2 до 7 дней, и преимущественно, предварительно определенный период равен приблизительно 5 дням. Время доения для каждого сеанса доения для каждого животного и надой молока для каждого сеанса доения для каждого животного предоставляются отдельно для утренних сеансов доения и вечерних сеансов доения для каждого животного из стада. Дополнительно, эти исторические данные включают в себя стадию лактации каждого животного из стада. Эти данные, затем наносятся в виде точек кривой с помощью большого числа распределений статистической вероятности, и модель наилучшего соответствия идентифицируется для каждого животного. Наилучшее соответствие определяется посредством оценки суммы квадратов ошибок прогнозов (SSE) для каждой модели. Прогнозируемое время выдаивания, другими словами, прогнозируемая продолжительность времени доения для сеанса доения определяется для каждого животного из модели и используется в качестве входных данных для модели оптимизации. Прогнозируемое время выдаивания для каждого животного является постоянным для этого животного и сохраняется в памяти 17. Однако, во время каждого сеанса доения каждого животного на конвейере 1 переменное время выдаивания получается на основе текущего надоя молока этого животного, и время выдаивания непрерывно обновляется во время каждого сеанса доения. В конце каждого сеанса доения окончательное обновленное значение времени выдаивания для каждого животного сохраняется и снабжается перекрестной ссылкой с этим животным, и время выдаивания для каждого животного взвешивается по отношению к самому последнему обновленному значению времени выдаивания.
После начала доения каждого животного на конвейере 1 время выдаивания каждого животного основывается на времени выдаивания, определенном из модели, взвешенной по отношению к самому последнему обновленному ее значению. После того как доение началось, время выдаивания каждого животного на конвейере динамически обновляется на основе текущего обнаруженного надоя молока этого животного. Это обновление выполняется посредством сравнения прогнозируемого профиля потока молока с текущим профилем потока молока, и затем спрогнозированное время доения регулируется соответственно.
Обращаясь теперь к вычислению оптимальной угловой скорости конвейера 1, в идеальной ситуации не будет непродуктивных периодов на конвейере, непродуктивный период является периодом, в течение которого животное должно оставаться на конвейере 1, после того как доение этого животного закончилось. Однако, в целом, это является недостижимым. Для того, чтобы минимизировать число непродуктивных периодов, может быть желательно в случае одного или небольшого числа животных задавать оптимальную угловую скорость конвейера 1 так, что одно или несколько животных могут не быть выдоены ко времени, когда это или эти животные достигнут идеальных финишных позиций для этих животных, или позиции 9 выхода, и в таком случае, это или эти животные будут оставаться на конвейере в течение второго оборота конвейера, а в крайних случаях в течение третьего или более оборотов конвейера до тех пор, пока выдаивание этого или этих животных не будет завершено.
Алгоритм, который микропроцессор 15 использует для того, чтобы минимизировать итоговое значение суммы непродуктивных периодов животных, находящихся в настоящий момент на конвейере, с точки зрения различных значений угловой скорости конвейера, является следующим:

Уравнение (1) может быть аппроксимировано в

где:
ω является угловой скоростью конвейера 1 в радианах в секунду,
ɸ ɸ является идеальной угловой финишной позицией в радианах для животных на конвейере от начальной позиции соответствующих животных,
n является числом животных на конвейере 1, когда оптимальная угловая скорость конвейера 1 вычисляется,
xi - это прогнозируемая финишная позиция в радианах для заданного животного от начальной позиции этого животного, и
mi - это число оборотов для заданного животного для заданной угловой скорости конвейера 1,
и где mi=0, если прогнозируемая угловая финишная позиция заданного животного находится в первом обороте доильного конвейера от начальной позиции этого животного, и увеличивается на 1 для всех дополнительных оборотов

и где




или

где:
Ɵi является текущей угловой позицией в радианах для заданного животного на конвейере 1 от начальной позиции для этого животного,
τi - это расчетное время доения для заданного животного на конвейере 1 с учетом текущего надоя молока этого животного, и
ti - это время, за которое заданное животное на конвейере 1 было подоено.
Каждый раз, когда оптимальное значение для угловой скорости конвейера 1 должно быть вычислено, микропроцессор 15 вычисляет множество итоговых значений суммы непродуктивных периодов животных, находящихся в настоящий момент на конвейере 1, из уравнения (2) для множества различных значений угловой скорости конвейера 1, включающих в себя текущее значение угловой скорости конвейера 1. Микропроцессор 15 затем определяет оптимальное значение угловой скорости конвейера 1 как значение угловой скорости, которое приводит в результате к минимальному значению для итоговых значений суммы непродуктивных периодов животных на конвейере 1.
На основании вычисленного оптимального значения для угловой скорости конвейера 1 микропроцессор 15 затем приводит в действие мотор 6, чтобы постепенно изменять текущую угловую скорость конвейера 1 на вновь вычисленную оптимальную угловую скорость, и, таким образом, работа доильного конвейера продолжается до тех пор, пока все животные из стада не будут подоены.
По завершении каждого сеанса доения исторические данные для животных из стада животных, которые хранятся в памяти 17, и которые содержат данные, определяющие профили доения, характерные для соответствующих животных из стада, и которые включают в себя историческое время доения и надой молока для каждого сеанса доения для каждого животного из стада, обновляются с помощью надоя молока и времени доения только что завершившегося сеанса доения, при этом исторический надой молока и время доения для каждого сеанса доения для каждого животного взвешиваются посредством их соответствующих обновленных значений.
В то время как вариант осуществления изобретения был описан, посредством которого оптимальная угловая скорость конвейера 1 вычисляется каждый раз, когда животное входит на доильный конвейер и/или выходит с доильного конвейера, представляется, что оптимальная угловая скорость конвейера 1 может быть вычислена в любое время во время вращения доильного конвейера. Например, представляется, что оптимальная угловая скорость доильного конвейера может вычисляться каждый раз, когда доильный аппарат присоединяется к животному, и/или каждый раз, когда доильный аппарат отсоединяется от животного. Также представляется, что оптимальная угловая скорость доильного конвейера может вычисляться каждый раз, когда темп доения одного или более животных был сочтен отклоняющимся от исторического и/или прогнозируемого темпа доения одного или более животных на конвейере. Дополнительно, представляется, что оптимальная угловая скорость конвейера может вычисляться каждый раз, когда доильный конвейер был перезапущен, остановился в результате дополнительного действия, требуемого в связи с животным, в котором предварительная обработка животного перед присоединением доильного аппарата к этому животному показала, что дополнительный осмотр или обработка этого животного потребовалась, которая вызвала необходимость остановки доильного конвейера. Также представляется, что оптимальная угловая скорость конвейера может быть вычислена с предварительно определенными временными интервалами, в результате чего, предварительно определенные временные интервалы могут изменяться в диапазоне от 0,5 секунды до 60 секунд.
В других вариантах осуществления изобретения предусматривается, что оптимальная угловая скорость конвейера может вычисляться менее часто по сравнению с описанным, и в некоторых вариантах осуществления изобретения предусматривается, что вместо вычисления оптимальной угловой скорости конвейера каждый раз, когда животное входит на конвейер, оптимальная угловая скорость для конвейера может определяться для всей группы животных, и в таком случае угловая скорость конвейера будет поддерживаться постоянной для этой группы, но может, например, быть изменена для следующей группы животных. Представляется, что, если одна группа животных была высокопродуктивной группой животных, оптимальная угловая скорость может быть вычислена для этой высокопродуктивной группы животных, в то время как оптимальная угловая скорость конвейера затем будет вычислена для другой группы животных, которая может быть группой с низким надоем молока.
Также предусматривается, что микропроцессор может быть запрограммирован, чтобы обнаруживать ненормальную скорость присоединения доильного аппарата, с которой доильные аппараты присоединяются к животным. Например, если доильные аппараты присоединяются к животным со скоростью один доильный аппарат за 12 секунд, и существует промежуток более 12 секунд между присоединением последнего доильного аппарата и следующего доильного аппарата, который должен быть присоединен, микропроцессор 15 может быть запрограммирован, чтобы либо замедлять, либо останавливать доильный конвейер до тех пор, пока следующий доильный аппарат не будет присоединен к следующему животному, к которому доильный аппарат должен быть присоединен. После того как этот следующий доильный аппарат был присоединен, затем микропроцессор 15 будет устанавливать угловую скорость доильного конвейера в угловую скорость, с которой конвейер вращался перед замедлением или его остановкой, и микропроцессор затем будет вычислять новую оптимальную угловую скорость для конвейера и затем управлять мотором 6, чтобы постепенно изменять угловую скорость конвейера 1 на только что вычисленную оптимальную угловую скорость.
В случаях, когда животные доятся в относительно быстром темпе, и угловая скорость конвейера является такой, что оператор не может присоединять доильные аппараты к животным со скоростью, достаточно быстрой, чтобы поспевать за скоростью, с которой животные входят на конвейер, представляется, что микропроцессор 15 может быть запрограммирован так, что в случае, когда присоединение доильного аппарата к животному пропускается, микропроцессор 15 будет либо останавливать, либо регулировать скорость мотора 6, чтобы уменьшать угловую скорость конвейера 1, чтобы предоставлять оператору достаточно времени для присоединения доильных аппаратов к животным со скоростью, с которой животные входят на конвейер.
В то время как средство для идентификации каждого животного, когда оно проходит через вход на конвейер, было описано как содержащее элемент RFID-датчика, любое другое подходящее средство идентификации животного может быть использовано, например, средство видеоидентификации или любое другое подходящее средство идентификации может быть использовано. Также предусматривается, что вместо или в дополнение к предоставлению средства идентификации животного рядом с входом на конвейер для идентификации животных, когда животные входят на конвейер, подходящее средство идентификации может быть предусмотрено на конвейере для идентификации соответствующих животных на конвейере на их соответствующих местах для размещения животных. Такое средство идентификации животного может быть единственным средством идентификации животного, которое будет сконфигурировано для идентификации животных на соответствующих местах для размещения животных, или подходящее средство идентификации животного может быть предусмотрено на каждом месте для размещения животного для идентификации животного на этом месте для размещения животного.
Также предусматривается, что исторические данные каждого животного из стада животных могут также включать в себя данные о режиме питания, относящиеся к каждому животному, например, надой молока на единицу количества корма, и/или надой молока на единицу количества различных типов корма. В таком случае, представляется, что система сбора данных будет предусмотрена для сбора данных, относящихся к текущему рациону соответствующих животных из стада, и такая система сбора будет собирать данные, относящиеся к типу корма, в настоящий момент потребляемого каждым животным, времени кормления каждого животного и количеству корма, потребляемого каждым животным за каждое кормление. Микропроцессор будет затем запрограммирован при вычислении прогнозируемой финишной позиции для каждого животного на конвейере принимать во внимание тип корма, недавно потребленного каждым животным, время последнего кормления и количество потребленного корма. При вычислении прогнозируемой финишной позиции для каждого животного микропроцессор будет модифицировать ожидаемый надой молока для этого животного на основе типа недавно потребленного корма, времени кормления и количества корма, потребленного этим животным. Микропроцессор может также быть запрограммирован, например, чтобы принимать во внимание тип и потребление корма, потребленного каждым животным в течение предыдущих одного-семи дней, а более типично, предыдущих одного-трех дней.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДОИЛЬНАЯ СИСТЕМА | 2018 |
|
RU2759610C2 |
| СПОСОБ УПРАВЛЕНИЯ СКОРОСТЬЮ ВРАЩЕНИЯ ПЛАТФОРМЫ ДОИЛЬНОЙ УСТАНОВКИ КАРУСЕЛЬНОГО ТИПА | 2015 |
|
RU2605780C2 |
| ДОИЛЬНАЯ СИСТЕМА | 2018 |
|
RU2756769C2 |
| ДОИЛЬНАЯ СИСТЕМА | 2018 |
|
RU2757130C2 |
| ДОИЛЬНОЕ ОБОРУДОВАНИЕ | 1998 |
|
RU2237993C2 |
| ДОИЛЬНОЕ УСТРОЙСТВО И СПОСОБ ДОЕНИЯ ЖИВОТНЫХ В НЕМ | 2018 |
|
RU2763972C2 |
| ДОИЛЬНОЕ УСТРОЙСТВО | 2007 |
|
RU2447652C2 |
| ПОЛЬЗОВАТЕЛЬСКИЙ ИНТЕРФЕЙС ПОВОРОТНОЙ ПЛАТФОРМЫ | 2011 |
|
RU2582058C2 |
| КОНСТРУКЦИЯ МОБИЛЬНОГО ДОИЛЬНОГО УСТРОЙСТВА И ОДНА ИЗ СОСТАВНЫХ ЧАСТЕЙ ДАННОГО УСТРОЙСТВА | 2013 |
|
RU2670524C2 |
| Доильная установка | 1978 |
|
SU718060A1 |
Группа изобретений относится к сельскому хозяйству, в частности к доению животных. Вычисляют прогнозируемую финишную позицию для каждого животного, находящегося в настоящий момент на конвейере, на которой доение этого животного, как прогнозируется, должно быть закончено. Вычисляют непродуктивный период для каждого животного, находящегося в настоящий момент на конвейере, являющийся периодом, в течение которого это животное будет оставаться на конвейере от прогнозируемой финишной позиции этого животного до одной из позиции выхода с конвейера для этого животного и идеальной финишной позиции для этого животного. Вычисляют итоговое значение непродуктивных периодов для соответствующих животных, находящихся в настоящий момент на конвейере. Определяют оптимальную угловую скорость конвейера в качестве значения угловой скорости конвейера, при котором итоговое значение суммы непродуктивных периодов соответствующих животных, находящихся в настоящий момент на конвейере, минимизируется. Устройство для работы кольцевого доильного конвейера содержит сигнальный процессор, выполненный с возможностью вычисления оптимальной угловой скорости конвейера. Кольцевой доильный конвейер содержит устройство для управления работой конвейера. Максимизируется число животных, подоенных за единицу времени. 4 н. и 19 з.п. ф-лы, 1 ил.
1. Способ работы кольцевого доильного конвейера, чтобы максимизировать число животных, подоенных за единицу времени на конвейере, где конвейер содержит множество мест для размещения животных, размещенных круговым образом по конвейеру, и каждое место для размещения животного выполнено с возможностью проходить через P позиций, включающих в себя позицию входа, в которой в соответствующие места для размещения животных последовательно входят животные, и позицию выхода, в которой из соответствующих мест для размещения животных последовательно выходят животные во время каждого оборота конвейера, и проходить между ними, при этом способ включает в себя вычисление оптимальной угловой скорости конвейера, чтобы максимизировать число животных, подоенных за единицу времени, в качестве функции исторических данных для каждого из животных, находящихся в настоящий момент на конвейере, где исторические данные содержат по меньшей мере одно из исторического времени доения для каждого сеанса доения, чтобы подоить каждое из животных, находящихся в настоящий момент на конвейере, и исторического надоя молока каждого сеанса доения для каждого из животных, находящихся в настоящий момент на конвейере, причем вычисление оптимальной угловой скорости конвейера, чтобы максимизировать число животных, подоенных за единицу времени, в качестве функции исторических данных для каждого из животных, находящихся в настоящий момент на конвейере, включает в себя: вычисление прогнозируемой финишной позиции для каждого животного, находящегося в настоящий момент на конвейере, на которой доение этого животного, как прогнозируется, должно быть закончено, вычисление непродуктивного периода для каждого животного, находящегося в настоящий момент на конвейере, являющегося периодом, в течение которого это животное будет оставаться на конвейере от прогнозируемой финишной позиции этого животного до одной из позиции выхода с конвейера для этого животного и идеальной финишной позиции для этого животного, вычисление итогового значения непродуктивных периодов для соответствующих животных, находящихся в настоящий момент на конвейере, и определение оптимальной угловой скорости конвейера в качестве значения угловой скорости конвейера, при котором итоговое значение суммы непродуктивных периодов соответствующих животных, находящихся в настоящий момент на конвейере, минимизируется.
2. Способ по п.1, в котором для соответствующих различных значений угловой скорости конвейера вычисляют множество итоговых значений суммы непродуктивных периодов соответствующих животных, находящихся в настоящий момент на конвейере.
3. Способ по п.2, в котором соответствующие вычисленные итоговые значения суммы непродуктивных периодов соответствующих животных, находящихся в настоящий момент на конвейере, для соответствующих различных значений угловой скорости конвейера сравнивают друг с другом, и значение угловой скорости, которое приводит в результате к минимальному значению вычисленных итоговых значений непродуктивных периодов соответствующих животных, находящихся в настоящий момент на конвейере, определяют в качестве оптимальной угловой скорости для конвейера.
4. Способ по п.2, в котором значения итогового значения суммы непродуктивных периодов для соответствующих животных, находящихся в настоящий момент на конвейере, вычисляют для каждого значения угловой скорости конвейера в качестве функции суммы текущей позиции каждого животного на конвейере и произведения этого значения угловой скорости конвейера и разности текущего прогнозируемого финишного времени этого животного и времени, за которое это животное было подоено на конвейере.
5. Способ по п.1, в котором способ дополнительно содержит этап, на котором вычисляют число оборотов конвейера, в течение которых каждое животное, находящееся в настоящий момент на конвейере, должно оставаться на конвейере для того, чтобы минимизировать итоговое значение суммы непродуктивных периодов соответствующих животных на конвейере.
6. Способ по п.5, в котором оптимальную угловую скорость конвейера вычисляют в качестве функции вычисленного числа оборотов, в течение которых каждое животное должно оставаться на конвейере для того, чтобы минимизировать итоговое значение суммы непродуктивных периодов соответствующих животных на конвейере.
7. Способ по п.1, в котором доение каждого животного, находящегося в настоящий момент на конвейере, считают начавшимся по одному из присоединения доильного аппарата к соскам этого животного и обнаружения потока молока из доильного аппарата, присоединенного к этому животному.
8. Способ по п.1, в котором оптимальную угловую скорость конвейера вычисляют в одном или обоих случаях - каждый раз, когда животное входит на конвейер, и каждый раз, когда животное выходит с конвейера.
9. Способ по п.1, в котором оптимальную угловую скорость конвейера вычисляют в одном или обоих случаях - когда доение животного на конвейере, начинается, каждый раз, когда отклонение в надое молока каждого животного на конвейере от исторического надоя молока этого животного обнаруживается, и каждый раз, когда отклонение во времени доения каждого животного на конвейере от исторического времени доения этого животного обнаруживается.
10. Способ по п.1, в котором угловую скорость конвейера изменяют каждый раз, когда вычисляют значение оптимальной угловой скорости конвейера, и угловую скорость конвейера изменяют на только что вычисленное значение оптимальной угловой скорости.
11. Способ по п.1, в котором угловую скорость конвейера постепенно изменяют, каждый раз когда угловая скорость конвейера изменяется до только что вычисленного значения оптимальной угловой скорости.
12. Способ по п.1, в котором оптимальную угловую скорость конвейера вычисляют в качестве одной или более из функции текущей угловой скорости конвейера, функции множества соответствующих различных значений угловой скорости конвейера и функции текущей позиции каждого животного, находящегося в настоящий момент на конвейере, от начальной позиции, являющейся позицией конвейера, в которой это животное вошло на конвейер.
13. Способ по п.1, при этом способ дополнительно содержит этап, на котором вычисляют прогнозируемую финишную позицию для каждого животного, находящегося в настоящий момент на конвейере, в которой доение этого животного, как прогнозируется, должно быть закончено.
14. Способ по п.13, в котором прогнозируемую финишную позицию каждого животного, находящегося в настоящий момент на конвейере, вычисляют в качестве функции текущей позиции этого животного на конвейере.
15. Способ по п.13, в котором прогнозируемую финишную позицию каждого животного, находящегося в настоящий момент на конвейере, вычисляют в качестве функции исторических данных этого животного.
16. Способ по п.13, в котором прогнозируемую финишную позицию каждого животного, находящегося в настоящий момент на конвейере, вычисляют в качестве одной или более из функции времени доения предыдущего сеанса доения этого животного на конвейере, функции времени доения предыдущего сеанса доения этого животного во время дня, соответствующее времени дня текущего сеанса доения этого животного, и функции текущего надоя молока этого животного на конвейере.
17. Способ по п.1, в котором прогнозируемое финишное время для каждого животного, находящегося в настоящий момент на конвейере, вычисляют в качестве одной или более из функции текущей позиции этого животного на конвейере, функции исторических данных этого животного, функции текущего надоя молока этого животного на конвейере, функции времени, за которое это животное было подоено на конвейере, и непосредственно ранее вычисленного прогнозируемого финишного времени, и функции разницы между текущим прогнозируемым финишным временем для этого животного и временем, за которое это животное было подоено на конвейере.
18. Способ по п.1, в котором непродуктивный период для каждого животного, находящегося в настоящий момент на конвейере, вычисляют в качестве функции разницы между одной из позиции выхода с конвейера для этого животного и идеальной финишной позиции для этого животного и прогнозируемой финишной позицией конвейера для этого животного.
19. Способ по п.1, в котором исторические данные каждого животного, которое должно быть подоено на конвейере, предоставляют в качестве профиля доения, характерного для этого животного, причем профиль доения каждого животного получают из исторических данных доения этого животного, полученных в течение множества сеансов доения этого животного.
20. Способ по п.19, в котором профиль доения каждого животного определяют вычерчиванием кривой по большому числу распределений статистической вероятности, и идентифицируют модель наилучшего соответствия.
21. Кольцевой доильный конвейер, выполненный с возможностью работы в соответствии со способом по любому из пп.1-20, чтобы максимизировать число животных, подоенных за единицу времени на конвейере.
22. Устройство для работы кольцевого доильного конвейера, чтобы максимизировать число животных, подоенных за единицу времени, причем устройство содержит сигнальный процессор, выполненный с возможностью осуществления способа по любому из пп.1-20 и вычисления оптимальной угловой скорости конвейера в соответствии со способом, чтобы максимизировать число животных, подоенных за единицу времени.
23. Кольцевой доильный конвейер, содержащий устройство по п.22 для управления работой конвейера, чтобы максимизировать число животных, подоенных за единицу времени.
| СПОСОБ УПРАВЛЕНИЯ СКОРОСТЬЮ ВРАЩЕНИЯ ПЛАТФОРМЫ ДОИЛЬНОЙ УСТАНОВКИ КАРУСЕЛЬНОГО ТИПА | 2015 |
|
RU2605780C2 |
| Фрикционный диск | 1978 |
|
SU830055A1 |
| WO 2002019806 A1, 14.03.2002 | |||
| Устройство для управления конвейерной доильной установкой | 1973 |
|
SU546327A1 |
| Доильная установка | 1987 |
|
SU1493188A1 |

