Область техники, к которой относится изобретение
Изобретение относится к медицинским мехатронным устройствам, а именно к экзоскелетам и может быть использовано медицинским персоналом для ухода за лежачими больными, реабилитации и восстановления двигательных способностей пациентов. Также предлагаемое изобретение можно использовать в промышленности, сельском хозяйстве, строительной отрасли при переносе тяжестей и работе в неудобных позах.
Уровень техники
Известен экзоскелет (патент RU на ПМ №198903, публ. 31.07.2020, МПК A61H 3/00), который содержит силовой модуль, включающий в себя спинной каркас, соединяемый с помощью шарнира с бедром, затем, через шарнирное соединение последовательно, с голенью и стопой. Модуль крепления, включающий в себя спинной каркас, присоединяемый с помощью грудных фиксирующих креплений и креплений поясничного отдела к корпусу оператора, модуль подъема груза. Привод для подъема, опускания и фиксирования переносимых грузов состоит из следующих основных элементов: адаптивной системы управления, включающей микропроцессорное устройство, систему управления питанием, периферийные устройства и элементы измерительного тракта, привода, включающего в себя двигатель и редуктор, кинематически связанные с барабаном. Привод электрически связан с адаптивной системой управления. В результате конструкция облегчает переноску грузов за счет снижения усилий, затрачиваемых на такую переноску, а также обеспечивает увеличение физических возможностей человека.
Недостатком данного технического решения является использование электропривода с адаптивной системой управления только в модуле поднятия груза. В остальном, конструкция экзоскелета является пассивной и, используя для ходьбы мышечную силу человека, не реализует усиления функций опорно-двигательного аппарата человека, лишь частично разгружая его. Движения человека в нем скованы вследствие того, что данная конструкция имеет минимальное число степеней свободы и абсолютно твердые звенья. Также у данного устройства узкая область применения, связанная только с переносом грузов и создается дополнительная нагрузка на мышцы опорно-двигательного аппарата человека, являющиеся источником движения и для самого экзоскелета.
Наиболее близким по технической сущности к предлагаемому изобретению является экзоскелет (патент RU №2760527, публ. 26.11.2021, МПК A61H 3/00), который содержит раму, на которой сверху закреплен упругий корсет, содержащий левую и правую дуги жесткости, соединенные между собой опорным кольцом. Дуги жесткости предназначены для поддержки или фиксации позвоночника. Опорное кольцо выполнено с возможностью крепления верхних экзоконечностей. Снизу к раме прикреплены одинаковые левая и правая нижние экзоконечности. При этом каждая нижняя экзоконечность содержит присоединенное к раме бедро, голень, к которой, снизу сзади присоединена пяточная кость, а спереди - плюсна с фалангами пальцев. Все подвижные соединения звеньев экзоскелета между собой реализованы посредством шарнира, выполненного в виде расположенных между соединяемыми элементами первого и второго цилиндрических шарниров, установленных взаимно-перпендикулярно и закрепленных на концах элементов экзоскелета. На каждом цилиндрическом шарнире установлены попарно идентичные пружины кручения для компенсации гравитационных нагрузок. Своими концами пружины кручения крепятся к звеньям, соединяемым шарниром, регулируя положения звеньев друг относительно друга и компенсируя гравитационные нагрузки. Бедра, голени, пяточные кости, плюсны, фаланги пальцев выполнены в виде звеньев, у которых со стороны расположенного ниже элемента имеется участок переменной длины, который содержит корпус с расположенным внутри него штоком, выполненным с возможностью возвратно-поступательного движения посредством закрепленной на корпусе пружины сжатия-растяжения для накопления и дальнейшего использования энергии опорно-двигательного аппарата человека. Со стороны участка переменной длины указанных элементов, их концом для соединения с соседним элементом является шток.
Недостатками данного технического решения являются низкие динамические и силовые характеристики, низкая степень разгрузки опорно-двигательного аппарата человека.
Раскрытие сущности изобретения
Технической задачей предлагаемого изобретения является повышение динамических и силовых характеристик экзоскелета.
Технический результат заключается в использовании активных электромеханических приводов в нижней части и корпусе экзоскелета.
Это достигается тем, что известный экзоскелет, содержащий раму, на которой сверху закреплен модуль для туловища человека, выполненный в виде левой и правой стоек, соединенных ребром жесткости, снизу к раме присоединены идентичные левая и правая нижние экзоконечности, каждая из которых содержит бедро, голень и стопу, при этом соединение рамы, левой и правой стоек, ребра жесткости, бедер, голеней и стоп выполнено в виде шарнирного соединения цилиндрических шарниров, установленных взаимно-перпендикулярно и закрепленных на концах соединяемых элементов экзоскелета, левая и правая стойки, бедра и голени выполнены в виде звеньев, снабжен вращательными электромеханическими приводами, подсоединенными к каждому шарнирному соединению, и выполненными в виде электродвигателя изменения угла между звеньями с редуктором, установленными на первом и втором цилиндрических шарнирах взаимно-перпендикулярно и закрепленных на концах соединяемых элементов экзоскелета, модулем управления экзоскелетом и аккумуляторной батареей, при этом звенья левой и правой стоек, бедер и голеней в середине содержат участок переменной длины, выполненный в виде поступательного электромеханического привода, содержащего винтовую передачу и соединенного с винтовой передачей электродвигателя изменения длины звена, закрепленного на верхней части звена для обеспечения относительного возвратно-поступательного движения частей звена, модуль управления экзоскелетом электрически соединен с электродвигателями изменения длины звена и электродвигателями изменения угла между звеньями и выполнен с возможностью передачи на электродвигатели изменения длины звена и электродвигатели изменения угла между звеньями управляющих сигналов, ввода команд человеком на управление экзоскелетом, аккумуляторная батарея электрически соединена с модулем управления экзоскелетом, электродвигателями изменения длины звена и электродвигателями изменения угла между звеньями, причем левая и правая стойки содержат левую и правую дуги, на концах которых выполнены крепления для подсоединения верхних экзоконечностей и полезной нагрузки, а ребро жесткости выполнено с возможностью крепления полезной нагрузки.
Краткое описание чертежей
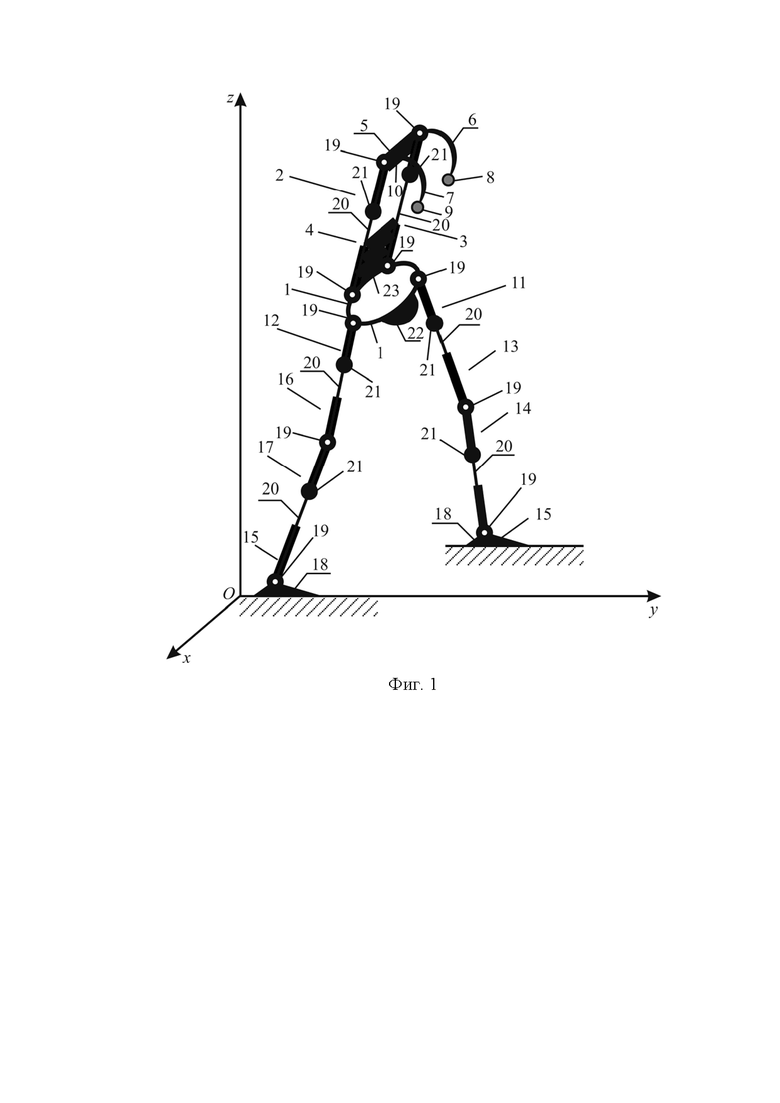
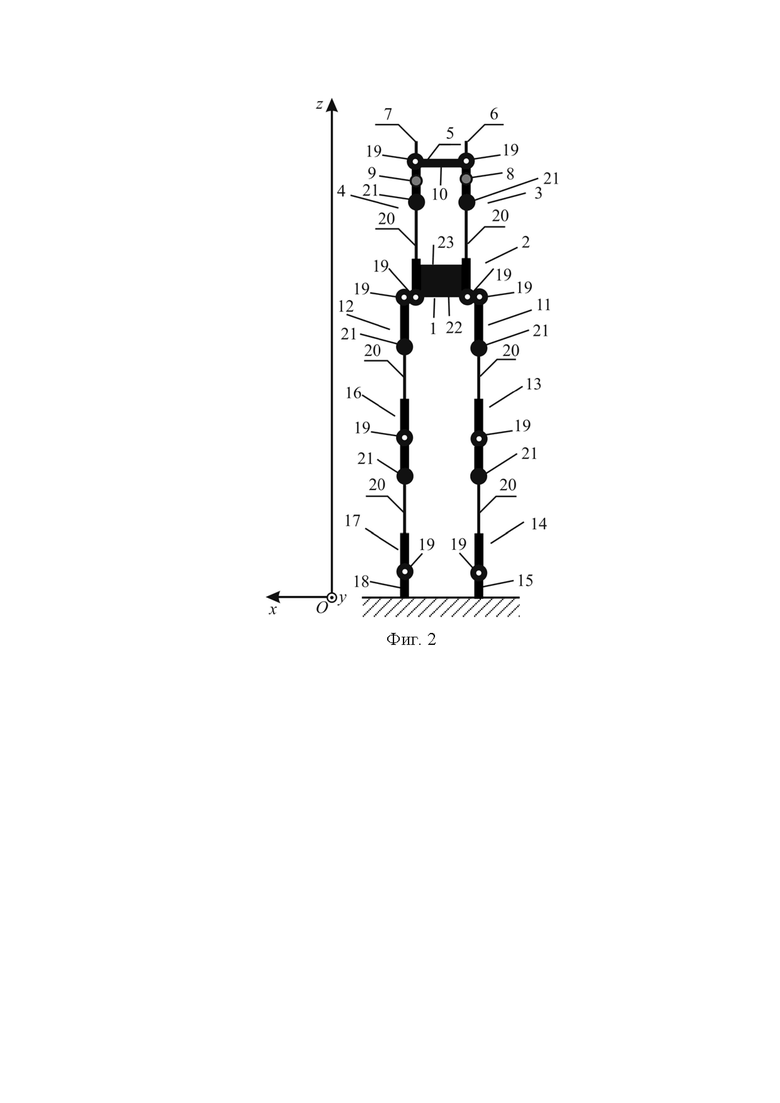
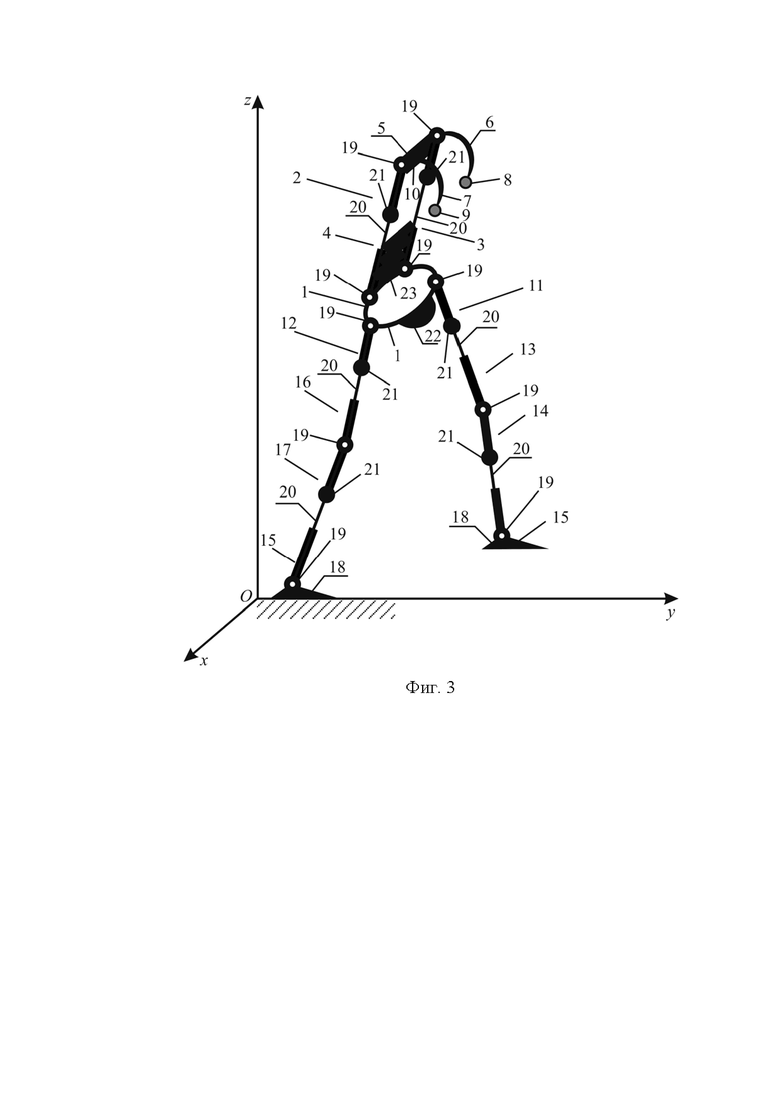
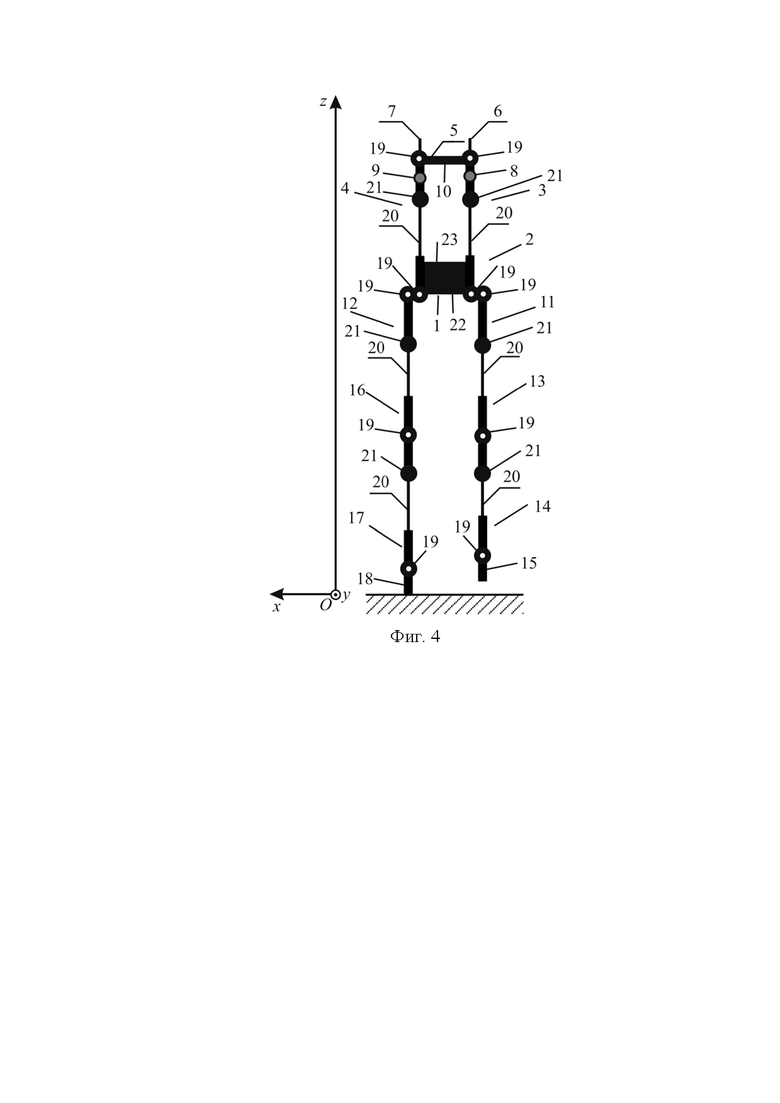
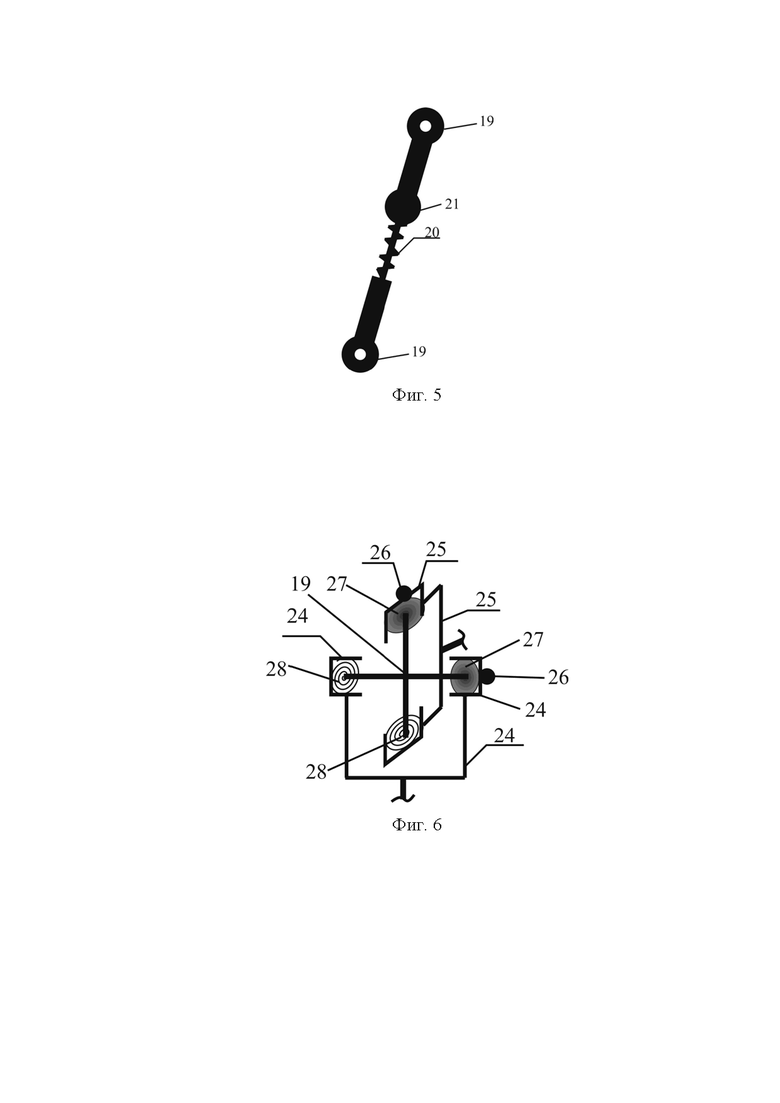
Сущность изобретения поясняется чертежами, где на фиг. 1 представлен вид сбоку экзоскелета в статике, на фиг. 2 изображен вид спереди (фас) экзоскелета в двухопорной фазе ходьбы в статике, на фиг. 3 показан вид сбоку экзоскелета в одноопорной фазе ходьбы в динамике, на фиг. 4 изображен вид спереди экзоскелета в динамике, на фиг. 5 изображен поступательный электромеханический привод участка переменной длины звеньев экзоскелета, на фиг. 6 изображен вращательный электромеханический привод шарнирного соединения звеньев экзоскелета.
Осуществление изобретения
Экзоскелет содержит раму 1, на которой сверху закреплен модуль для туловища человека 2, выполненный в виде левой 3 и правой 4 стоек переменной длины, соединенных ребром жесткости 5. К стойкам 3 и 4 прикреплены левая 6 и правая 7 дуги, на концах которых расположены крепления 8 на левой и 9 на правой, выполненные с возможностью подсоединения верхних экзоконечностей, либо полезной нагрузки. Левая 3 и правая 4 стойки переменной длины выполнены для поддержки или фиксации позвоночника, минимально ограничивая степени подвижности корпуса человека, а ребро жесткости 5 выполнено с возможностью крепления полезной нагрузки 10 сзади, на спине пользователя (например, по типу ранца).
Снизу к раме 1 присоединены идентичные левая 11 и правая 12 нижние экзоконечности. При этом левая нижняя экзоконечность 11 содержит присоединенное к раме 1 левое бедро 13, соединенную с ним снизу левую голень 14, к которой, снизу присоединена левая стопа 15.
Правая нижняя экзоконечность 12 содержит присоединенное к раме 1 правое бедро 16, соединенную с ним снизу правую голень 17, к которой снизу присоединена правая стопа 18.
Соединение рамы 1, левой 3 и правой 4 стоек переменной длины, ребра жесткости 5, левой 6 и правой 7 дуг, левого бедра 13, левой голени 14, левой стопы 15, правого бедра 16, правой голени 17, правой стопы 18 выполнено в виде шарнирного соединения 19.
Левая 3 и правая 4 стойки переменной длины, левое 13 и правое 16 бедра, левая 14 и правая 17 голени выполнены в виде звеньев, у которых в середине расположен участок переменной длины, выполненный в виде поступательного электромеханического привода, содержащего винтовую передачу 20 и соединенный с ней электродвигатель изменения длины звена 21, закрепленный на верхней части звена для обеспечения относительного возвратно-поступательного движения абсолютно твердых частей звена (фиг. 5).
На раме 1 спереди установлен модуль управления экзоскелетом 22, а сзади закреплена аккумуляторная батарея 23.
Шарнирное соединение 19 выполнено в виде расположенных между соединяемыми элементами первого 24 и второго 25 цилиндрических шарниров, установленных взаимно-перпендикулярно и закрепленных на концах соединяемых элементов экзоскелета. На первом 24 и втором 25 цилиндрических шарнирах с одной стороны установлены электродвигатели изменения угла между звеньями 26, установленные на концах абсолютно твердых участков звеньев с присоединенными к ним редукторами 27 (либо мотор-редукторами), закрепленными в шарнирном соединении 19 между звеньями для реализации вращательного движения в шарнирах между звеньями, с другой стороны установлены пружины кручения 28 для компенсации гравитационных нагрузок. Электродвигатели изменения угла между звеньями 26 с редукторами 27 закреплены на корпусе шарнира, а выходной вал редуктора соединен с осью шарнира, активно управляя углом поворота звеньев, друг относительно друга и компенсируя нагрузки приложенные к экзоскелету.
Указанный вращательный электромеханический привод выполнен с возможностью активного управления изменением углов между звеньями и, тем самым, движением экзоскелета, для разгрузки опорно-двигательного аппарата человека и усиления его физических способностей.
Модуль управления экзоскелетом 22 электрически соединен (проводами, проложенными по звеньям экзоскелета) с электродвигателями изменения длины звена 21 и электродвигателями изменения угла между звеньями 26.
Аккумуляторная батарея 23 электрически соединена (проводами, проложенными по звеньям экзоскелета) с модулем управления экзоскелетом 22, электродвигателями изменения длины звена 21 и электродвигателями изменения угла между звеньями 26.
Модуль управления экзоскелетом 22 содержит вычислительный блок, выполненный с возможностью передачи управляющих сигналов на электродвигатели изменения длины звена 21 и электродвигатели изменения угла между звеньями 26, а также интерфейс для ввода команд человеком на управление экзоскелетом.
Аккумуляторная батарея 23 выполнена с возможностью обеспечения энергией модуля управления экзоскелетом 22 и электроприводов экзоскелета (электродвигателей изменения длины звена 21 и электродвигателей изменения угла между звеньями 26).
Экзоскелет работает следующим образом.
В начальный момент времени человек располагается внутри экзоскелета. Нагрузка от корпуса и рук человека распределяется на раму 1 и на модуль для туловища человека 2.
Нагрузка от нижних конечностей человека распределяется на левую 11 и правую 12 нижние экзоконечности. Поддержание позы человека и разгрузка мышц опорно-двигательного аппарата человека осуществляется за счет поступательных электромеханических приводов участков переменной длины звеньев экзоскелета и вращательных электромеханических приводов шарнирных соединений 19.
В динамике, для того, чтобы сделать первый шаг, как при обычной ходьбе, из статического положения равновесия человек выходит, немного наклоняясь вперед и отталкиваясь одной из ног от опоры.
Модуль управления экзоскелетом 22 передает управляющие сигналы на включение электродвигателей изменения длины звена 21 и электродвигателей изменения угла между звеньями 26 на опорной ноге, усиливая отталкивание от опорной поверхности. Далее, движение в одноопорной фазе (фиг. 3 и 4) переносимой ноги и корпуса является близким к баллистическому, и происходит с незначительным участием поступательных и вращательных электромеханических приводов, позволяя экономить энергию. Участки переменной длины (винтовые передачи 20) переносимой ноги при этом удлиняются. Во время движения экзоскелет обеспечивает физиологически правильные движения звеньев для поворотов опорно-двигательного аппарата человека.
В момент касания переносимой ногой опорной поверхности, участки переменной длины (винтовые передачи 20) уменьшаются, гася ударные нагрузки на ногу человека от постановки ноги на опору.
Поступательные и вращательные электромеханические приводы работают при этом на торможение. В момент, когда опорная нога производит отталкивание от опоры, модуль управления экзоскелетом 22 передает управляющие сигналы на включение электродвигателей изменения длины звена 21 и электродвигателей изменения угла между звеньями 26, которые сообщают ей дополнительный импульс при отталкивании, тем самым разгружая опорно-двигательный аппарат человека. Затем цикл повторяется.
При разрядке аккумуляторной батареи 23 ее заряжают с помощью зарядного устройства от бытовой электросети.
Вследствие изменения длин звеньев на участках переменной длины посредством винтовых передач 20 повышается комфортабельность экзосклета при его эксплуатации человеком. В результате использования поступательных и вращательных электромеханических приводов, достигается повышение динамических и силовых характеристик экзоскелета, что способствует снятию части нагрузки на мышцы опорно-двигательного аппарата человека, и, как следствие, повышается комфортабельность использования экзоскелета, возникает возможность переносить более тяжелые грузы, дольше выполнять трудовые операции, проводить восстановление двигательных функций и реабилитацию человека с заболеваниями опорно-двигательного аппарата.
Теоретически установлено, что для взрослого человека массой тела от 50 кг до 100 кг параметры предложенного экзоскелета без полезной нагрузки следующие: максимальные управляющие моменты на выходном валу редуктора в шарнире 19 до 3000 Н⋅м, силы на участках переменной длины, развиваемые винтовой передачей до 5000 Н. В случае наличия полезной нагрузки производят индивидуальную коррекцию электроприводов экзоскелета под конкретные задачи, решаемые пользователем при помощи экзоскелета.
Использование изобретения позволяет повысить динамические и силовые характеристики экзоскелета за счет использования активных электромеханических приводов в нижней части и корпусе экзоскелета.
| название | год | авторы | номер документа |
|---|---|---|---|
| Экзоскелет | 2023 |
|
RU2830368C1 |
| Экзоскелет | 2021 |
|
RU2760527C1 |
| Тазобедренный шарнирный модуль экзоскелета | 2023 |
|
RU2818620C1 |
| УСТРОЙСТВО РЕАБИЛИТАЦИИ ПАЦИЕНТОВ С НАРУШЕНИЯМИ ОПОРНО-ДВИГАТЕЛЬНОГО АППАРАТА | 2020 |
|
RU2765403C1 |
| СПОСОБ ЗАДАНИЯ ЖЕЛАЕМЫХ ТРАЕКТОРИЙ ДВИЖЕНИЯ ЭКЗОСКЕЛЕТА ДЛЯ ПЕРЕДВИЖЕНИЯ ПОЛЬЗОВАТЕЛЯ С НАРУШЕНИЕМ ФУНКЦИЙ ОПОРНО-ДВИГАТЕЛЬНОГО АППАРАТА, УСТРОЙСТВО СОДЕЙСТВИЯ ХОДЬБЕ ЭТОГО ПОЛЬЗОВАТЕЛЯ И СПОСОБ УПРАВЛЕНИЯ ЭТИМ УСТРОЙСТВОМ | 2015 |
|
RU2598124C1 |
| ГРУЗОВОЙ ПАССИВНЫЙ ЭКЗОСКЕЛЕТ С НАСТРОЙКОЙ ПОД АНТРОПОМЕТРИЧЕСКИЕ ПАРАМЕТРЫ ПОЛЬЗОВАТЕЛЯ | 2018 |
|
RU2725288C2 |
| ЭКЗОСКЕЛЕТ | 2014 |
|
RU2567589C1 |
| Комплекс роботизированный медицинский для реабилитации нижних конечностей и механотренажер реабилитационного комплекса для нижних конечностей | 2022 |
|
RU2820327C1 |
| ГОЛЕНОСТОПНОЕ ЗВЕНО ОРТЕЗА ИЛИ ЭКЗОСКЕЛЕТА | 2017 |
|
RU2687573C2 |
| МЯГКИЙ МНОГОРЕЖИМНЫЙ ЭКЗОСКЕЛЕТ | 2022 |
|
RU2797688C1 |
Изобретение относится к медицинской технике, а именно к экзоскелетам. Экзоскелет содержит раму, на которой сверху закреплен модуль для туловища человека, выполненный в виде левой и правой стоек, соединенных ребром жесткости. Снизу к раме присоединены идентичные левая и правая нижние экзоконечности, каждая из которых содержит бедро, голень и стопу. Соединение рамы, левой и правой стоек, ребра жесткости, бедер, голеней и стоп выполнено в виде шарнирного соединения цилиндрических шарниров, установленных взаимно-перпендикулярно и закрепленных на концах соединяемых элементов экзоскелета. Левая и правая стойки, бедра и голени выполнены в виде звеньев. Экзоскелет снабжен вращательными электромеханическими приводами, подсоединенными к каждому шарнирному соединению, и выполненными в виде электродвигателя изменения угла между звеньями с редуктором, установленными на первом и втором цилиндрических шарнирах взаимно перпендикулярно, закрепленных на концах соединяемых элементов экзоскелета, модулем управления экзоскелетом и аккумуляторной батареей. Звенья левой и правой стоек, бедер и голеней в середине содержат участок переменной длины, выполненный в виде поступательного электромеханического привода, содержащего винтовую передачу и соединенного с винтовой передачей электродвигателя изменения длины звена, закрепленного на верхней части звена для обеспечения относительного возвратно-поступательного движения частей звена. Модуль управления экзоскелетом электрически соединен с электродвигателями изменения длины звена и электродвигателями изменения угла между звеньями и выполнен с возможностью передачи на электродвигатели изменения длины звена и электродвигатели изменения угла между звеньями управляющих сигналов, ввода команд человеком на управление экзоскелетом. Аккумуляторная батарея электрически соединена с модулем управления экзоскелетом, электродвигателями изменения длины звена и электродвигателями изменения угла между звеньями. Левая и правая стойки содержат левую и правую дуги, на концах которых выполнены крепления для подсоединения верхних экзоконечностей и полезной нагрузки. Ребро жесткости выполнено с возможностью крепления полезной нагрузки. Техническим результатом является использование активных электромеханических приводов в нижней части и корпусе экзоскелета. 6 ил.
Экзоскелет, содержащий раму, на которой сверху закреплен модуль для туловища человека, выполненный в виде левой и правой стоек, соединенных ребром жесткости, снизу к раме присоединены идентичные левая и правая нижние экзоконечности, каждая из которых содержит бедро, голень и стопу, при этом соединение рамы, левой и правой стоек, ребра жесткости, бедер, голеней и стоп выполнено в виде шарнирного соединения цилиндрических шарниров, установленных взаимно перпендикулярно и закрепленных на концах соединяемых элементов экзоскелета, левая и правая стойки, бедра и голени выполнены в виде звеньев, отличающийся тем, что экзоскелет снабжен вращательными электромеханическими приводами, подсоединенными к каждому шарнирному соединению, и выполненными в виде электродвигателя изменения угла между звеньями с редуктором, установленными на первом и втором цилиндрических шарнирах взаимно перпендикулярно, закрепленных на концах соединяемых элементов экзоскелета, модулем управления экзоскелетом и аккумуляторной батареей, при этом звенья левой и правой стоек, бедер и голеней в середине содержат участок переменной длины, выполненный в виде поступательного электромеханического привода, содержащего винтовую передачу и соединенного с винтовой передачей электродвигателя изменения длины звена, закрепленного на верхней части звена для обеспечения относительного возвратно-поступательного движения частей звена, модуль управления экзоскелетом электрически соединен с электродвигателями изменения длины звена и электродвигателями изменения угла между звеньями и выполнен с возможностью передачи на электродвигатели изменения длины звена и электродвигатели изменения угла между звеньями управляющих сигналов, ввода команд человеком на управление экзоскелетом, аккумуляторная батарея электрически соединена с модулем управления экзоскелетом, электродвигателями изменения длины звена и электродвигателями изменения угла между звеньями, причем левая и правая стойки содержат левую и правую дуги, на концах которых выполнены крепления для подсоединения верхних экзоконечностей и полезной нагрузки, а ребро жесткости выполнено с возможностью крепления полезной нагрузки.
| US 10710237 B2, 14.07.2020 | |||
| US 11471360 B2, 18.10.2022 | |||
| US 20190358807 A1, 28.11.2019 | |||
| US 20200337934 A1, 29.10.2020 | |||
| ЭКЗОСКЕЛЕТ С ЭЛЕКТРОПНЕВМАТИЧЕСКОЙ СИСТЕМОЙ УПРАВЛЕНИЯ | 2014 |
|
RU2565101C1 |
| Аппарат ортопедический на нижнюю конечность с микропроцессорным управлением | 2021 |
|
RU2793532C1 |

