Изобретение относится к области разработки и применения мобильных малогабаритных беспилотных авиационных систем с беспилотными летательными аппаратами самолетного типа с ручным запуском и парашютной посадкой, предназначенных для воздушного наблюдения, разведки, обнаружения и сопровождения интересующих объектов на суше и на море.
Известен трансформируемый беспилотный летательный аппарат (БПЛА) (RU №2688506, 2019 г.), включающий фюзеляж, снабженный приборным отсеком с постоянной полезной нагрузкой, антенным хозяйством и блоком питания, и соединенные с ним крылья, крылья выполнены сменными, а в фюзеляже образованы, по меньшей мере, четыре посадочных места для установки и фиксации сменных крыльев, количество и расположение которых определяется в зависимости от выбранной аэродинамической схемы.
Недостатком этого устройства является то что, подъемная сила создается только плоскостями крыльев, расположенными в плоскости полета.
Известна также малогабаритная беспилотная авиационная система для воздушного наблюдения и разведки (RU №2748623, 2021 г.), включающая наземную станцию управления, бортовые и наземные средства радиосвязи, навигации и управления полетом и выполненный по самолетной аэродинамической схеме «разборный БПЛА», содержащий фюзеляж цилиндрической формы, в передней части которого размещен отсек цилиндрической формы с обтекателем в форме полусферы для полезной нагрузки, включающей оптико-электронную систему в виде гиростабилизированной телевизионной и инфракрасной камеры, сверху фюзеляжа установлен пилон обтекаемой формы, в передней верхней части которого смонтирован парашютный отсек с посадочным парашютом и привязной системой парашюта, снабженной привязными стропами и элементами крепления их к фюзеляжу, в задней части размещена мотогондола с электрическим двигателем толкающего типа, снабженным складным пропеллером, высоко расположенное крыло, имеющее трапециевидную форму и состоящее из левой консоли крыла, снабженной левым элероном, и правой консоли крыла, снабженной правым элероном, прикрепленных к фюзеляжу с помощью разъемного соединения с применением узлов крепления и фиксации, и закрепленную к задней части фюзеляжа хвостовую балку, несущую Т-образное хвостовое оперение с неподвижным вертикальным оперением и с горизонтальным оперением, снабженным по его задней кромке рулем высоты.
Недостатком этого устройства является сложность конструкции и невозможность обеспечить надежную и безаварийную парашютную посадку БПЛА при неблагоприятных погодных условиях. При наклоне носовой части вниз можно повредить отсек полезной нагрузки и размещенную в нем дорогостоящую оптико-электронную систему. При наклоне хвостовой части вниз может быть сломана хвостовая балка. Необходимость частого ремонта после аварийных приземлений БПЛА приводит к значительному повышению эксплуатационных затрат в процессе практического использования указанной малогабаритной беспилотной системы.
Наиболее близкой по технической сущности к заявленному изобретению является малогабаритная беспилотная авиационная система (RU №2473455, 2013 г.) для воздушного наблюдения и разведки, включающая наземную станцию управления; бортовые и наземные средства радиосвязи, навигации и управления полетом; пусковое устройство и несущий полезную нагрузку разборный беспилотный летательный аппарат модульной конструкции, который может быть легко собран для полета и разобран для транспортировки в компактном контейнере, содержащий носовую часть с установленной в ней полезной нагрузкой, содержащую носовой обтекатель с прорезанным в нем отверстием, закрытым прозрачным материалом; левую и правую части крыла, содержащие продольные лонжероны, поперечные нервюры, обшивку и элероны, управляемые сервоприводами, установленными на нижней поверхности частей крыла; фюзеляж, содержащий центральный лонжерон, узлы крепления и замочные соединения носовой части, левой и правой частей крыла к фюзеляжу; силовую установку, расположенную в фюзеляже и снабженную двигателем с воздушным винтом, центральный лонжерон фюзеляжа выполнен в виде съемной трубки из композитных материалов, средняя часть которой плотно размещена внутри дополнительно расположенного в фюзеляже и прикрепленного к его боковым стенкам центрального цилиндрического держателя, продольная ось которого перпендикулярна продольной оси фюзеляжа, а периферийные части указанной трубки плотно входят в дополнительно и соосно установленные в левой и правой частях крыла боковые цилиндрические держатели; на торцах съемной трубки центрального лонжерона фюзеляжа, входящих в указанные боковые держатели в левой и правой частях крыла, установлены дисковые вставки из композитного материала.
Недостатком этого устройства является, то что использованные: центральный лонжерон, узлы крепления и замочные соединения частей крыла с фюзеляжем увеличивают массу летательного аппарата, что при прочих равных условиях снижает продолжительность его полета и ограничивает возможность установки более эффективных и массивных полезных нагрузок. Замочные соединения в прототипе являются ненадежными, так как они не имеют стопорных элементов. При резких порывах ветра и возникновении больших ветровых нагрузок на БПЛА нельзя исключить самопроизвольную расстыковку частей крыла от фюзеляжа в полете. Это может привести к потере беспилотного летательного аппарата и срыву выполнения полетного задания.
Задачей изобретения является создание конструкции беспилотного летательного аппарата, позволяющей оперативно доставлять беспилотную систему в заданный район применения, как транспортными средствами, так и в пешем порядке, имеющей разборную, быстрособираемую конструкцию, с солнечной батареей, которая обеспечит возможность длительного нахождения в воздухе с применением электродвигателей и пополнения запасов электроэнергии в полете, с ручным запуском и парашютной посадкой.
Требуемый технический результат достигается тем, что мобильная беспилотная система для воздушного наблюдения и разведки содержит мобильную наземную станцию управления, наземные средства радиосвязи, навигации и управления полетом. Беспилотный летательный аппарат выполнен по схеме «летающее крыло» и имеет разборный каркас, балки которого вставляется в специальные пазы эластичной оболочки. На верхнюю поверхность оболочки нанесена гибкая солнечная батарея, соединенная с плоским аккумулятором расположенном в специальном кармане на нижней поверхности. Балки каркаса в носовой части корпуса беспилотного летательного аппарата крепятся с фиксацией в блок полезной нагрузки, содержащий средства радиосвязи, навигации и управления, телевизионные и инфракрасные камеры, установленные на гиростабилизированной платформе. Там же расположена и парашютная система. В кормовой части корпуса, несущая балка каркаса и балка кормовой рулевой панели крепятся с фиксацией в гнезда на маршевых электродвигателях. Маршевые электродвигатели снабжены толкающими винтами, винты защищены вертикальными стабилизаторами, расположенными на корпусах маршевых электродвигателей. Между маршевыми электродвигателями на балке кормовой рулевой панели расположены горизонтальные рули, управление которыми осуществляется отдельным электродвигателем с сервоприводом. На балке кормовой рулевой панели так же расположено устройство защиты при посадке.
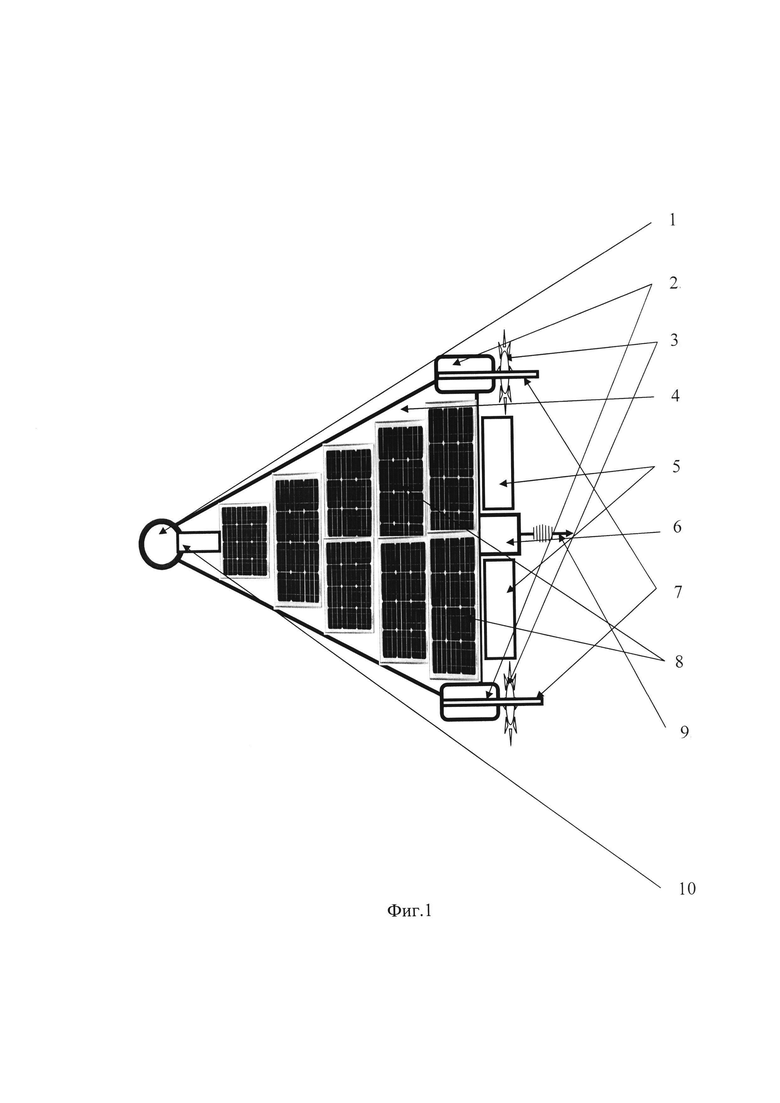
Сущность изобретения поясняется чертежом, где на Фиг. 1 представлена мобильная беспилотная система для воздушного наблюдения и разведки, включающая в свой состав:
1 - блок полезной нагрузки;
2 - маршевые электродвигатели;
3 - толкающие винты;
4 - эластичная оболочка;
5 - горизонтальные рули;
6 - электродвигатели с сервоприводами;
7 - вертикальный стабилизатор;
8 - солнечная батарея;
9 - устройство защиты при посадке;
10 - парашютная система.
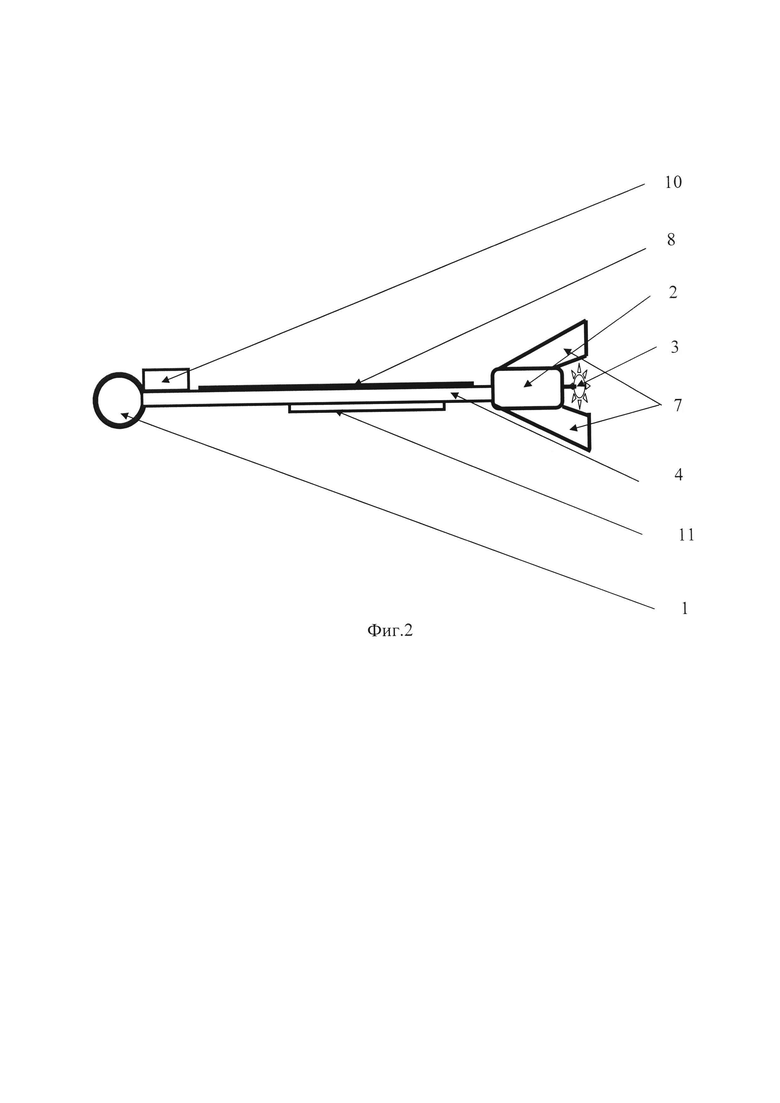
На Фиг. 2 представлен вид справа на мобильную беспилотную система для воздушного наблюдения и разведки, где:
11 - аккумулятор.
Изобретение работает следующим образом: мобильную беспилотную систему для воздушного наблюдения и разведки, имеющую в своем составе наземную станцию управления, наземные средства радиосвязи, навигации и управления полетом, а также беспилотный летательный аппарат в разобранном виде транспортируют к месту использования имеющимися транспортными средствами или переносят в зависимости от характеристики местности.
Подготовка к применению включает в себя развертывание наземных средств управления, сборку, и запуск беспилотного летательного аппарата. Из укладки извлекаются составные части и осуществляется сборка. Разворачивается эластичная оболочка (4), на верхнюю часть которой нанесена солнечная батарея (8), в пазы по краю эластичной оболочки (4) вставляются балки каркаса, выполненные из легкого и прочного углепластика. В носовой части, балки каркаса вставляются в специальные пазы и фиксируются в блоке полезной нагрузки (1). В кормовой части корпуса, несущая балка каркаса и балка кормовой рулевой панели крепятся с фиксацией в гнезда на маршевых электродвигателях (2) которые снабжены толкающими винтами (3), а винты защищены вертикальными стабилизаторами (7) на корпусах маршевых электродвигателей. На балке кормовой рулевой панели расположены горизонтальные рули (5), управление которыми осуществляется отдельным электродвигателем с сервоприводом (6). На балке кормовой рулевой панели так же расположено устройство защиты при посадке (9). В специальный карман на нижней поверхности вставляется аккумуляторная батарея (11) и осуществляется коммутация системы электропитания, системы управления и наблюдения.
Старт беспилотного летательного аппарата мобильной беспилотной системы для воздушного наблюдения и разведки осуществляется ручным запуском. В процессе полета беспилотный летательный аппарат управляется с мобильной наземной станции управления, используя средства радиосвязи и навигации. Полет летательного аппарата осуществляется с помощью двух маршевых электродвигателей (2) с толкающим винтом. В полете осуществляется наблюдение с использованием телевизионной и инфракрасной камеры, установленных на гиростабилизированной платформе. Изменение параметров полета осуществляется изменением угла горизонтальных рулей (5) (по высоте) и изменением мощности одного или другого маршевых двигателей (2) (по тангажу). Изменение угла отклонения горизонтальных рулей (5) осуществляется электродвигателем с сервоприводом. Время использования мобильной беспилотной системы для воздушного наблюдения и разведки зависит от решаемой задачи или возможностей системы электропитания. Основным источником электропитания всех потребителей системы является аккумуляторная батарея (11), которая в свою очередь имеет возможность пополнения энергии в полете за счет использования солнечной батареи (8).
После выполнения поставленной задачи осуществляется посадка беспилотного летательного аппарата парашютным способом с использованием парашютной системы (10). Для предотвращения повреждения наиболее важных блоков при соприкосновении с землей (блока полезной нагрузки, маршевых электродвигателей и их винтов, горизонтальных рулей и т.д.) установлено устройство защиты при посадке (9), демпфирующее удар вместе с вертикальными стабилизаторами (7).
| название | год | авторы | номер документа |
|---|---|---|---|
| БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ ВОЗДУШНОЙ РАЗВЕДКИ | 2023 |
|
RU2823386C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ МАЛОГАБАРИТНЫЙ ТРАНСФОРМИРУЕМЫЙ МНОГОРАЗОВЫЙ БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ В ТРАНСПОРТНО-ПУСКОВОМ КОНТЕЙНЕРЕ И СПОСОБЫ СТАРТА | 2022 |
|
RU2778177C1 |
| МОДУЛЬНАЯ КОНСТРУКЦИЯ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ | 2017 |
|
RU2681423C1 |
| Многоцелевой комбинированный беспилотный летательный аппарат | 2024 |
|
RU2831435C1 |
| Беспилотный аппарат и комплекс наблюдения для него | 2016 |
|
RU2642202C1 |
| АВИАКОМПЛЕКС БОЕВОЙ С БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2023 |
|
RU2827270C1 |
| Беспилотный летательный аппарат самолетного типа для обнаружения пропавшего человека | 2019 |
|
RU2723201C1 |
| БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2021 |
|
RU2754277C1 |
| БЕСПИЛОТНЫЙ АВИАЦИОННЫЙ КОМПЛЕКС ДЛЯ ПРОТИВОДЕЙСТВИЯ МИКРО- И МИНИ-БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТАМ ПРОТИВНИКА | 2021 |
|
RU2802236C2 |
| МАЛОГАБАРИТНАЯ БЕСПИЛОТНАЯ АВИАЦИОННАЯ СИСТЕМА | 2009 |
|
RU2473455C2 |
Изобретение относится к области разработки и применения мобильных малогабаритных беспилотных авиационных систем с БПЛА самолетного типа с ручным запуском и парашютной посадкой, предназначенных для воздушного наблюдения, разведки, обнаружения и сопровождения объектов. Система содержит мобильную наземную станцию управления, наземные средства радиосвязи, навигации и управления полетом. БПЛА выполнен по схеме «летающее крыло» и имеет разборный каркас, балки которого вставляются в пазы эластичной оболочки. На верхнюю поверхность оболочки нанесена гибкая солнечная батарея, соединенная с плоским аккумулятором, расположенным в кармане на нижней поверхности. Балки каркаса в носовой части корпуса крепятся с фиксацией в блок полезной нагрузки, содержащий средства радиосвязи, навигации и управления, телевизионные и инфракрасные камеры, установленные на гиростабилизированной платформе. Там же расположена и парашютная система. В кормовой части корпуса несущая балка каркаса и балка кормовой рулевой панели крепятся с фиксацией в гнезда на маршевых электродвигателях. Маршевые электродвигатели снабжены толкающими винтами. Повышается эффективность. 2 ил.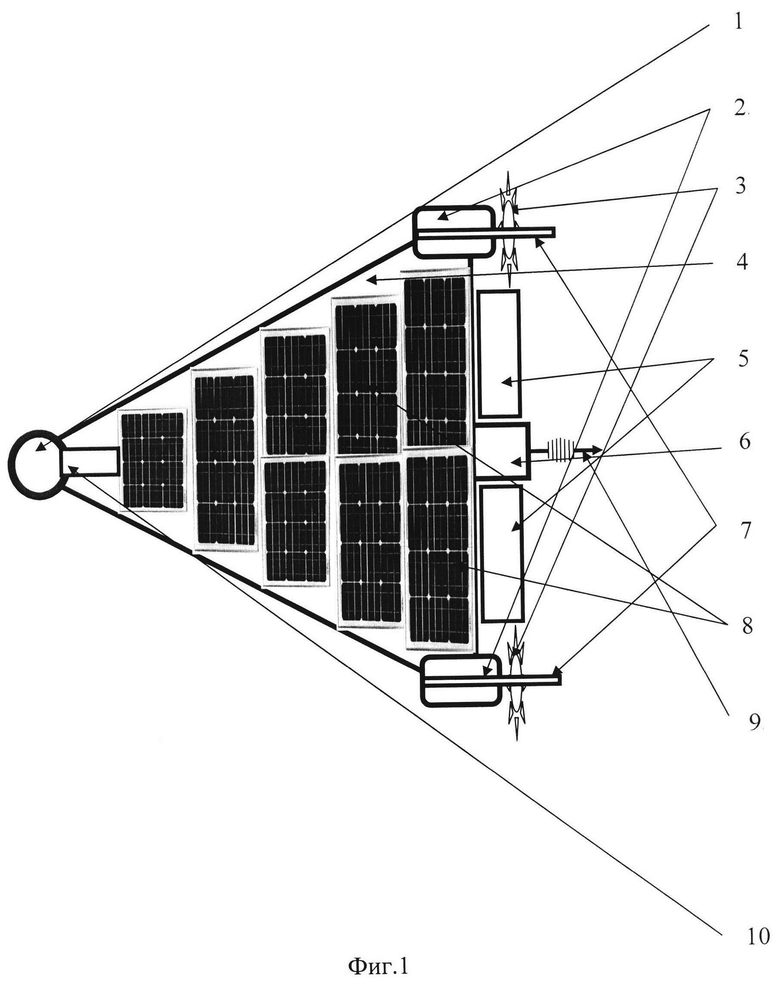
Мобильная беспилотная система для воздушного наблюдения и разведки, содержащая мобильную наземную станцию управления; бортовые и наземные средства радиосвязи, навигации и управления полетом, беспилотный летательный аппарат, отличающийся тем, что корпус беспилотного летательного аппарата выполнен по схеме «летающее крыло» в виде разборного каркаса, который вставляется в эластичную оболочку, на верхней поверхности которой нанесена гибкая солнечная батарея, а на нижней поверхности расположена плоская аккумуляторная батарея в кармане, балки каркаса в носовой части корпуса беспилотного летательного аппарата крепятся с фиксацией в блок полезной нагрузки, содержащей средства радиосвязи, навигации и управления, телевизионные и инфракрасные камеры, установленные на гиростабилизированной платформе, парашютную систему, в кормовой части корпуса, несущая балка каркаса и балка кормовой рулевой панели крепятся с фиксацией в гнезда на маршевых электродвигателях с толкающими винтами, винты защищены вертикальными стабилизаторами, расположенными на корпусах маршевых электродвигателей, между ними расположены горизонтальные рули, управление которыми осуществляется отдельным электродвигателем с сервоприводом, там же расположено устройство защиты при посадке.
| МАЛОГАБАРИТНАЯ БЕСПИЛОТНАЯ АВИАЦИОННАЯ СИСТЕМА | 2009 |
|
RU2473455C2 |
| МОДУЛЬНАЯ КОНСТРУКЦИЯ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ | 2017 |
|
RU2681423C1 |
| US 20030001045 A1, 02.01.2003 | |||
| US 20170233070 A1, 17.08.2017 | |||
| CN 106741837 A, 31.05.2017 | |||
| CN 108974357 A, 11.12.2018. | |||

