Изобретение относится к области авиационной техники, в частности, к беспилотным летательным аппаратам и предназначено для борьбы с микро- и мини летательными аппаратами квадрокоптерного, мультикоптерного или вертолетного типа.
Известно устройство - истребитель малогабаритных беспилотных летательных аппаратов (RU 145279 от 20.09.2014 г.), состоящий из малогабаритного беспилотного летательного аппарата, автоматической системы управления с элементами искусственного интеллекта, парашютом, детонатором, на малогабаритном беспилотном летательном аппарате установлены камеры кругового обзора не менее пяти, позволяющие с помощью бортового процессора определять в пассивном режиме пространственные волны, выбирая определенную дальность и высоту полета для точного сброса устройства поражения, шестью отсеками, размещенными подряд в нижней части фюзеляжа для размещения устройств поражения, имеющие строго секционную направленность и остроконечную форму элементов поражения для уничтожения малогабаритных беспилотных летательных аппаратов противника.
Наиболее близкой по технической сущности к предполагаемому изобретению является беспилотная система активного противодействия БПЛА (RU 2669881 от 16.10.2018 г.), содержащая беспилотный летательный аппарат, систему управления, камеру кругового обзора, устройство поражения, электродвигатель с винтовым толкающим движителем, аккумуляторную батарею, блок сбрасываемых пороховых ускорителей, стабилизированную камеру наблюдения в видимом и инфракрасном диапазоне, лазерный дальномер, систему спутниковой навигации и связи, систему неуправляемых реактивных снарядов малого калибра. Корпус беспилотного летательного аппарата выполнен в форме многосекционного летающего крыла, обтянутого сверху тонкой пленочной кремниевой солнечной батареей.
Недостатками известных устройств являются: демаскирование местоположения охраняемых объектов, интенсивный расход эксплуатационного ресурса комплекса с беспилотным летательным аппаратом, сложность наведения на цель неуправляемых реактивных снарядов.
Задачей изобретения является обнаружение, преследование и поражение микро- и мини- малогабаритных беспилотных летательных аппаратов противника путем механического заклинивания их электродвигателей.
Сущность изобретения заключается в том, что беспилотный авиационный комплекс для противодействия микро- и мини- беспилотным летательным аппаратам противника содержит непосредственно беспилотный летательный аппарат, оборудованный системой управления, камерой кругового обзора, аккумуляторной батареей, системой спутниковой навигации и связи, корпус беспилотного летательного аппарата выполнен в форме летающего крыла в виде центроплана с двумя консолями, жестко прикрепленными к нему по бокам, система управления, система навигации, система связи жестко закреплены внутри центроплана к его передней стенке, аккумуляторная батарея закреплена внутри центроплана к его задней стенке, корпус беспилотного летательного аппарата снабжен электродвигателем с винтовым тянущим движителем, камерой углового обзора, двумя рулями направления, двумя неподвижными опорными стойками шасси, съемной емкостью для хранения средств механического поражения беспилотных летательных аппаратов: песка или смеси песка, стружки пластика и металлических опилок, которая представляет собой каркас с тремя трубками для хранения средств механического поражения и соединена резьбовым соединением с хвостовой частью центроплана, механизмом сброса средств механического поражения беспилотных летательных аппаратов, который представляет собой три механические тяги, выполненные в виде трех сервоприводов, жестко прикрепленных к хвостовой части центроплана, и трех направляющих, одним концом соединенных с выходами соответствующих сервоприводов, а другим - с заглушками, закрывающими выходные отверстия трубок съемной емкости, камера кругового обзора подвижно закреплена в боковой части электродвигателя, который жестко закреплен в носовой части центроплана и имеет два входа-выхода, камера углового обзора жестко закреплена на одной из консолей, каждый руль направления закреплен шарнирным соединением и сервоприводом на одной из неподвижных опорных стойках шасси, которые жестко закреплены по одной на каждой консоли, система управления имеет восемь входов-выходов, первый вход-выход системы управления соединен с входом-выходом системы навигации, второй вход-выход системы управления соединен с входом-выходом системы связи, третий вход-выход системы управления соединен с входом-выходом камеры углового обзора, четвертый вход-выход системы управления соединен с первым входом-выходом электродвигателя, пятый вход-выход системы управления соединен с входом сервопривода одного руля направления, шестой вход-выход системы управления соединен с входом сервопривода второго руля направления, седьмой вход-выход системы управления соединен со входами сервоприводов механических тяг механизма сброса средств механического поражения беспилотных летательных аппаратов, восьмой вход-выход системы управления соединен с входом-выходом камеры кругового обзора, выход аккумуляторной батареи соединен со вторым входом-выходом электродвигателя.
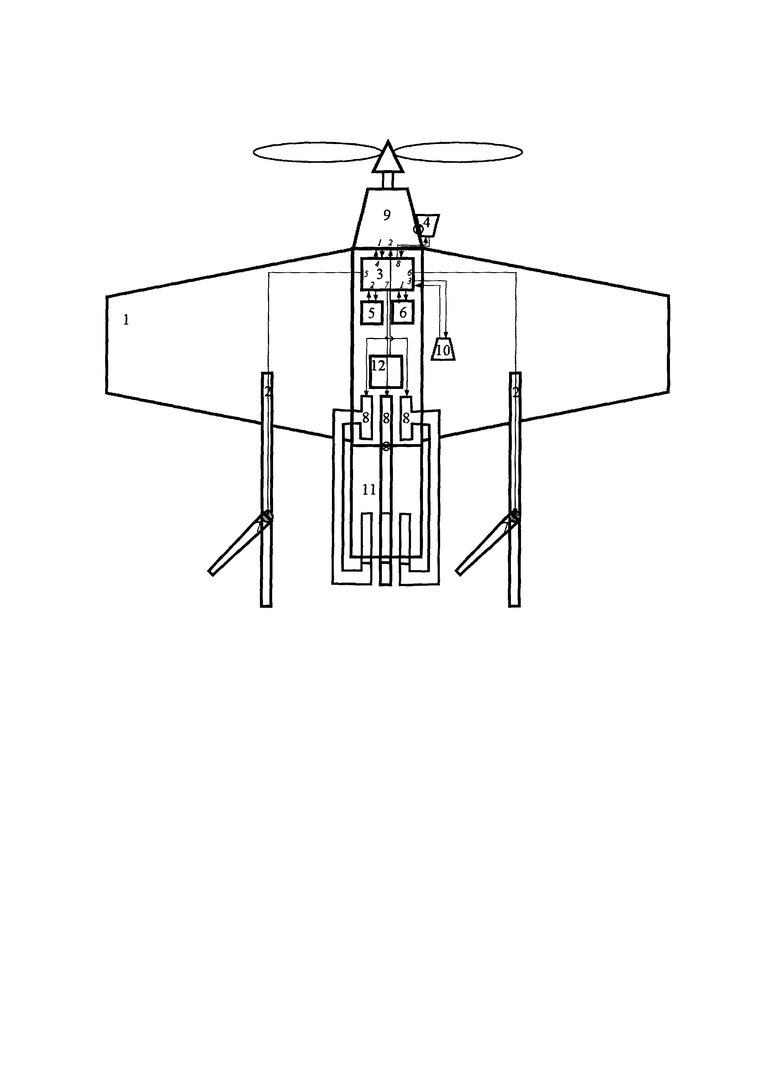
На фиг. представлен беспилотный авиационный комплекс для противодействия микро- и мини- беспилотным летательным аппаратам противника, включающий в свой состав:
1 - беспилотный летательный аппарат (БПЛА);
2 - неподвижные опорные стойки шасси;
3 - система управления;
4 - камера кругового обзора;
5 - система связи;
6 - система спутниковой навигации;
7 - рули направления;
8 - механизм сброса средств механического поражения беспилотных летательных аппаратов;
9 - электродвигатель с винтовым тянущим движителем;
10 - камера углового обзора;
11 - съемная емкость;
12 - аккумуляторная батарея.
Беспилотный авиационный комплекс для противодействия микро- и мини- беспилотным летательным аппаратам противника представляет собой БПЛА 1, выполненный в форме летающего крыла в виде центроплана с двумя консолями, жестко прикрепленными к нему по бокам, система управления 3, система навигации 5, система связи 6 жестко закреплены внутри центроплана БПЛА 1 к его передней стенке, аккумуляторная батарея 12 закреплена внутри центроплана БПЛА 1 к его задней стенке, обеспечивая возможность ее замены, съемная емкость 11 представляет собой каркас с тремя трубками для хранения средств механического поражения и соединена с хвостовой частью центроплана БПЛА 1 резьбовым соединением, обеспечивая возможность замены съемной емкости 11 после сброса средств механического поражения беспилотных летательных аппаратов, механизм сброса средств механического поражения беспилотных летательных аппаратов 8 представляет собой три механические тяги, выполненные в виде трех сервоприводов, жестко прикрепленных к хвостовой части центроплана БПЛА 1, и трех направляющих, одним концом соединенных с выходами соответствующих сервоприводов, а другим - с заглушками, закрывающими выходные отверстия трубок съемной емкости 11, электродвигатель с винтовым тянущим движителем 9 жестко закреплен в носовой части центроплана БПЛА 1 и имеет два входа-выхода, камера кругового обзора 4 закреплена в боковой части электродвигателя с винтовым тянущим движителем 9 подвижным соединением, обеспечивая возможность вращения камеры кругового обзора 4 в плоскости тангажа БПЛА 1, камера углового обзора 10 жестко закреплена на одной из консолей БПЛА 1, каждый руль направления 7 закреплен на одной из неподвижных опорных стойках шасси 2 шарнирным соединением и сервоприводом, обеспечивая возможность движения рулей направления 7 в плоскости рыскания БПЛА 1, неподвижные опорные стойки шасси 2 жестко закреплены по одной на каждой консоли БПЛА 1, система управления 3 имеет восемь входов-выходов, первый вход-выход системы управления 3 соединен с входом-выходом системы навигации 6, второй вход-выход системы управления 3 соединен с входом-выходом системы связи 5, третий вход-выход системы управления 3 соединен с входом-выходом камеры углового обзора 10, четвертый вход-выход системы управления 3 соединен с первым входом-выходом электродвигателя с винтовым тянущим движителем 9, пятый вход-выход системы управления 3 соединен с входом сервопривода одного руля направления 7, шестой вход-выход системы управления 3 соединен с входом сервопривода второго руля направления 7, седьмой вход-выход системы управления 3 соединен со входами сервоприводов механических тяг механизма сброса средств механического поражения беспилотных летательных аппаратов 8, обеспечивая возможность движения направляющих механических тяг механизма сброса средств механического поражения беспилотных летательных аппаратов 8 в плоскости, параллельной продольной оси БПЛА 1, восьмой вход-выход системы управления 3 соединен с входом-выходом камеры кругового обзора 4, выход аккумуляторной батареи 12 соединен со вторым входом-выходом электродвигателя с винтовым тянущим движителем 9.
БПЛА 1 беспилотного авиационного комплекса для противодействия микро- и мини- беспилотным летательным аппаратам противника разворачивается в заданном районе на открытой площадке не менее чем пять на пять метров в вертикальном положении на неподвижных опорных стойках шасси 2. Управление беспилотным авиационным комплексом для противодействия микро- и мини- беспилотным летательным аппаратам противника осуществляет оператор с наземного пульта управления, а питание составных частей обеспечивается аккумуляторной батареей 12, при этом с выхода аккумуляторной батареи 12 на второй вход-выход электродвигателя с винтовым тянущим движителем 9 поступает напряжение четырнадцать вольт, которое в регуляторе оборотов электродвигателя с винтовым тянущим движителем 9 преобразуется в напряжение пять вольт, поступает на четвертый вход-выход системы управления 3 и далее через соответствующие входы-выходы по шлейфовым проводным соединениям питает камеру кругового обзора 4, систему связи 5, систему спутниковой навигации 6, сервоприводы рулей направления 7, сервоприводы механических тяг механизма сброса средств механического поражения беспилотных летательных аппаратов 8, камеру углового обзора 10, и напряжением от восьми до пятнадцати вольт питает непосредственно электродвигатель с винтовым тянущим движителем 9. Беспилотный авиационный комплекс для противодействия микро- и мини- беспилотным летательным аппаратам противника работает следующим образом: при визуальном обнаружении или при получении информации об обнаружении микро- и мини- беспилотных летательных аппаратов противника оператор с наземного пульта управления выдает команду на взлет беспилотному авиационному комплексу для противодействия микро- и мини- беспилотным летательным аппаратам противника. Сигнал с наземного пульта управления по линии радиосвязи поступает в приемную часть системы связи 5, далее с входа-выхода системы связи 5 сигнал по шлейфовому проводному соединению поступает на второй вход-выход системы связи 5, а затем с четвертого входа-выхода системы управления 3 по шлейфовому проводному соединению поступает на первый вход-выход электродвигателя с винтовым тянущим движителем 9 и приводит его в движение.
БПЛА 1 производит вертикальный взлет и набор требуемой высоты в вертикальном положении, при этом на экране наземного пульта управления оператора отображаются изображения с камеры кругового обзора 4 и камеры углового обзора 10, которые поступают с выходов камеры кругового обзора 4 и камеры углового обзора 10 на восьмой и третий входы-выходы системы управления 3, соответственно, далее со второго входа-выхода системы управления 3 поступает на вход-выход системы связи 5, и затем по линии радиосвязи от передающей части системы связи 5 поступает на вход наземного пульта управления. По окончании набора требуемой высоты по команде оператора через систему управления 3 БПЛА 1 переходит в горизонтальный полет и на максимальной скорости выдвигается в зону действия микро- и мини- беспилотных летательных аппаратов противника. Весь процесс взлета и пилотирования контролируется и корректируется оператором с наземного пульта управления при помощи системы управления 3, системы связи 5 и системы спутниковой навигации 6, при этом обмен сигналами между указанными системами осуществляется по соответствующим входам-выходам систем, а также по линии радиосвязи между наземным пультом управления и системой связи 5. Для изменения направления и высоты полета БПЛА 1 оператор выдает соответствующие команды с наземного пульта управления, которые по линии радиосвязи поступают в систему связи 5 и далее с входа-выхода системы связи 5 поступают на второй вход-выход системы управления 3, после чего управляющий сигнал с пятого и шестого входов-выходов системы управления 3 поступает на входы сервоприводов рулей направления 7, приводя их в движение. Войдя в зону действия микро- или мини- беспилотных летательных аппаратов противника, оператор совмещает направление полета БПЛА 1 с направлением движения микро- и мини-беспилотных летательных аппаратов противника, занимает высоту выше них, а затем переводит БПЛА 1 в вертикальный полет и одновременно с пульта наземного управления выдает команду на применение средств механического поражения беспилотных летательных аппаратов, хранящихся в съемной емкости 11. Данная команда в виде радиосигнала по линии радиосвязи поступает в систему связи 5, далее с входа-выхода системы связи 5 поступает на второй вход-выход системы управления 3, после чего управляющий сигнал с седьмого входа-выхода системы управления 3 поступает на входы сервоприводов механических тяг механизма сброса средств механического поражения беспилотных летательных аппаратов 8, приводя их в движение, тем самым открывая заглушки выходных отверстий трубок съемной емкости 11 и выбрасывая средства механического поражения беспилотных летательных аппаратов. Под воздействием силы тяжести и набегающего потока от винтового тянущего движителя электродвигателя 9 средства механического поражения беспилотных летательных аппаратов устремляются вниз, образуя облако поражающих элементов. Через систему воздушного охлаждения электродвигателей микро- и мини- беспилотных летательных аппаратов противника поражающие элементы попадают в электродвигатели и выводят их из строя. Оператор оценивает результат воздействия на экране наземного пульта управления, на котором транслируется изображение с камеры углового обзора 10, и принимает решение на движение к месту посадки и необходимости повторного воздействия. Посадка БПЛА 1 осуществляется в вертикальном положении на неподвижные опорные стойки шасси 2. После посадки производится смена съемной емкости 11 и аккумуляторной батареи 12, после чего беспилотный авиационный комплекс для противодействия микро- и мини- беспилотным летательным аппаратам противника готов к повторному применению.
Технико-экономическая эффективность предполагаемого изобретения заключается в том, что беспилотный авиационный комплекс для противодействия микро- и мини- беспилотным летательным аппаратам противника обеспечивает решение задач по обнаружению, преследованию и поражению микро- и мини- малогабаритных беспилотных летательных аппаратов противника путем механического заклинивания их электродвигателей использованием доступного подручного ресурса, например, песка или смеси песка, стружки пластика и металлических опилок. Кроме того при применении предполагаемого изобретения не требуется обеспечивать высокую точность наведения поражающих средств и осуществлять барражирование в воздушном пространстве над полевой позицией, что уменьшает расход эксплуатационного ресурса беспилотного летательного аппарата и снижает вероятность обнаружения позиции противником.
| название | год | авторы | номер документа |
|---|---|---|---|
| Беспилотная система активного противодействия БПЛА | 2017 |
|
RU2669881C1 |
| Беспилотный летательный аппарат для поражения радиоэлектронных средств противника | 2022 |
|
RU2787694C1 |
| СПОСОБ ФОРМИРОВАНИЯ МАЛОЗАМЕТНОЙ МОДУЛЬНОЙ БЕСПИЛОТНОЙ ЛЕТАТЕЛЬНОЙ СИСТЕМЫ | 2023 |
|
RU2829915C1 |
| Мобильная беспилотная система для воздушного наблюдения и разведки | 2022 |
|
RU2793711C1 |
| Многоцелевой комбинированный беспилотный летательный аппарат | 2024 |
|
RU2831435C1 |
| БЕСПИЛОТНЫЙ КОНВЕРТОПЛАН КРИШТОПА (БКК), СПОСОБ ФУНКЦИОНИРОВАНИЯ БКК И СПОСОБ ФУНКЦИОНИРОВАНИЯ УСТРОЙСТВА ВЕРТИКАЛЬНОГО ЗАПУСКА ПРИ ИСПОЛЬЗОВАНИИ С БКК | 2022 |
|
RU2809067C1 |
| БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ ВОЗДУШНОЙ РАЗВЕДКИ | 2023 |
|
RU2823386C1 |
| Система наблюдения и противодействия беспилотным летательным аппаратам | 2020 |
|
RU2738508C1 |
| Автономный беспилотный летательный аппарат для доставки малокалиберных боеприпасов до цели | 2023 |
|
RU2826931C1 |
| Высокоскоростной беспилотный летательный аппарат | 2021 |
|
RU2787906C1 |
Беспилотный авиационный комплекс для противодействия микро- и мини-беспилотным летательным аппаратам противника содержит беспилотный летательный аппарат с корпусом в форме летающего крыла, оборудованного системой управления, системой навигации, системой связи, аккумуляторной батареей, камерой кругового обзора, съемной емкостью для хранения средств механического поражения беспилотных летательных аппаратов, соединенные определенным образом. Обеспечивается обнаружение, преследование и поражение микро- и мини-малогабаритных беспилотных летательных аппаратов противника путем механического заклинивания их электродвигателей. 1 ил.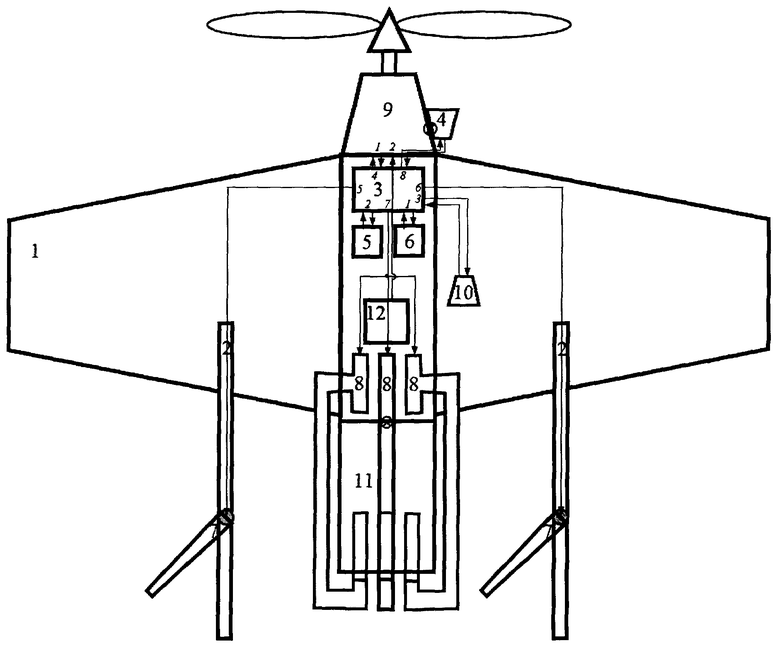
Беспилотный авиационный комплекс для противодействия микро- и мини-беспилотным летательным аппаратам противника, состоящий из непосредственно беспилотного летательного аппарата, оборудованного системой управления, камерой кругового обзора, аккумуляторной батареей, системой спутниковой навигации и связи, корпус беспилотного летательного аппарата выполнен в форме летающего крыла, отличающийся тем, что летающее крыло выполнено в виде центроплана с двумя консолями, жестко прикрепленными к нему по бокам, система управления, система навигации, система связи жестко закреплены внутри центроплана к его передней стенке, аккумуляторная батарея закреплена внутри центроплана к его задней стенке, корпус беспилотного летательного аппарата снабжен электродвигателем с винтовым тянущим движителем, камерой углового обзора, двумя рулями направления, двумя неподвижными опорными стойками шасси, съемной емкостью для хранения средств механического поражения беспилотных летательных аппаратов: песка или смеси песка, стружки пластика и металлических опилок, которая представляет собой каркас с тремя трубками для хранения средств механического поражения и соединена резьбовым соединением с хвостовой частью центроплана, механизмом сброса средств механического поражения беспилотных летательных аппаратов, который представляет собой три механические тяги, выполненные в виде трех сервоприводов, жестко прикрепленных к хвостовой части центроплана, и трех направляющих, одним концом соединенных с выходами соответствующих сервоприводов, а другим - с заглушками, закрывающими выходные отверстия трубок съемной емкости, камера кругового обзора подвижно закреплена в боковой части электродвигателя, который жестко закреплен в носовой части центроплана и имеет два входа-выхода, камера углового обзора жестко закреплена на одной из консолей, каждый руль направления закреплен шарнирным соединением и сервоприводом на одной из неподвижных опорных стойках шасси, которые жестко закреплены по одной на каждой консоли, система управления имеет восемь входов-выходов, первый вход-выход системы управления соединен с входом-выходом системы навигации, второй вход-выход системы управления соединен с входом-выходом системы связи, третий вход-выход системы управления соединен с входом-выходом камеры углового обзора, четвертый вход-выход системы управления соединен с первым входом-выходом электродвигателя, пятый вход-выход системы управления соединен с входом сервопривода одного руля направления, шестой вход-выход системы управления соединен с входом сервопривода второго руля направления, седьмой вход-выход системы управления соединен со входами сервоприводов механических тяг механизма сброса средств механического поражения беспилотных летательных аппаратов, восьмой вход-выход системы управления соединен с входом-выходом камеры кругового обзора, выход аккумуляторной батареи соединен со вторым входом-выходом электродвигателя.
| БЕСПИЛОТНЫЙ УДАРНЫЙ КОМПЛЕКС | 2016 |
|
RU2681826C2 |
| БЕСПИЛОТНЫЙ ВЗРЫВОМАГНИТНЫЙ КОМПЛЕКС | 2016 |
|
RU2688498C2 |
| БЕСПИЛОТНЫЙ УДАРНЫЙ КОМПЛЕКС С ИЗМЕНЯЕМОЙ СТРЕЛОВИДНОСТЬЮ КРЫЛА | 2016 |
|
RU2679757C2 |
| US 11022407 B2, 01.06.2021 | |||
| US 11209247 B2, 28.12.2021. | |||
