Изобретение относится к лазерной технике, а именно к лазерной гироскопии. Известен способ стабилизации и регулирования периметра одномодового (двухчастотного) зеемановского лазерного гироскопа со знакопеременной магнитооптической частотной подставкой [1]. В нем для настройки на моду используется сигнал модуляции интенсивности одной из волн, пропорциональный расстройке от центра линии усиления лазера.
Недостатком этого способа является то, что он неприменим в четырехчастотном режиме зеемановского лазерного гироскопа.
Наиболее близким по технической сущности к предлагаемому способу является способ цифровой стабилизации и регулировки периметра четырехчастотного зеемановского лазерного гироскопа со знакопеременной магнитооптической частотной подставкой в форме меандра [2].
В этом способе осуществляют оптическое совмещение встречных волн каждой моды, оптическое разделение двух ортогонально поляризованных мод и получение интерференционных картин на двухплощадочных фотоприемниках, преобразование оптических сигналов интерференционных картин в синусоидальные сигналы с частотой, равной разности частот встречных волн в двух модах, преобразующихся на компараторах в импульсные сигналы с учетом знака разности частот встречных волн, формирование дискриминационной характеристики системы регулирования периметра по разности частот подставок двух мод за положительный и отрицательный полупериоды меандра и подстройку периметра лазера с помощью пьезозеркал в точку равенства частот подставок мод по критерию
 где ƒy - сигнал расстройки периметра,
где ƒy - сигнал расстройки периметра,  - частоты биений моды «А» и моды «В» за положительный период меандра,
- частоты биений моды «А» и моды «В» за положительный период меандра,  - частоты биений моды «А» и моды «В» за отрицательный период меандра.
- частоты биений моды «А» и моды «В» за отрицательный период меандра.
Недостатком известного способа является то, что применение меандра и синхронного съема данных по его переднему фронту при воздействии постоянных угловых ускорений в четырехчастотном гироскопе делает невозможной точное измерение амплитуды частотной подставки на двух модах и, как следствие настройку и стабилизацию периметра, что приводит к ошибке в измерении выходной угловой скорости.
Задачей предлагаемого способа является исключение ошибок измерения амплитуды частотной подставки и угловой скорости при изменении расстройки периметра из-за воздействия на гироскоп постоянных угловых ускорений.
Поставленная задача решается за счет того, что в известном способе стабилизации и регулирования периметра четырехчастотного зеемановского лазерного гироскопа со знакопеременной магнитооптической частотной подставкой в форме меандра, включающем оптическое разделение двух ортогонально поляризованных мод, оптическое совмещение встречных волн каждой моды и получение интерференционных картин на двухплощадочных фотоприемниках, преобразование оптических сигналов интерференционных картин в синусоидальные сигналы с частотой, равной разности частот встречных волн в двух модах, преобразующихся на компараторах в импульсные сигналы с учетом знака разности частот встречных волн, формирование дискриминационной характеристики системы регулировки периметра по разности частот подставок на двух модах за положительный и отрицательный полупериоды меандра и подстройку периметра лазера с помощью пьезозеркал в точку равенства частот подставок мод, съем выходных данных четырехчастотного зеемановского лазерного гироскопа смещают на четверть периода относительно переднего фронта меандра.
Суть предлагаемого способа заключается в том, что в четырехчастотном ЗЛГ со знакопеременной магнитооптическгой частотной подставкой в форме меандра, съем выходных данных четырехчастотного зеемановского лазерного гироскопа смещен на четверть периода относительно переднего фронта меандра.
В изобретении происходит оптическое совмещение встречных волн каждой моды, оптическое разделение двух ортогонально поляризованных мод, получение интерференционных картин на двухплощадочных фотоприемниках, преобразование оптических сигналов интерференционных картин в синусоидальные электрические сигналы с частотой, равной разности частот встречных волн в двух модах, преобразующихся на компараторах в импульсные сигналы с учетом знака разности частот встречных волн, формирование дискриминационной характеристики системы регулирования периметра по разности частот подставок двух мод за положительный и отрицательный полупериоды меандра и подстройку периметра лазера с помощью пьезозеркал в рабочую точку равенства амплитуд частотных подставок двух мод, смещение съема выходных данных четырехчастотного зеемановского лазерного гироскопа на четверть периода относительно переднего фронта меандра.
Для подстройки в рабочую точку равенства амплитуд частотных подставок двух мод, сигнал расстройки периметра гироскопа должен быть равен нулю, он с учетом углового ускорения выражается как  Причиной ошибки настройки на моду является то, что при изменении угловой скорости в сигнале рассогласования цифровой системы регулировки периметра появляется составляющая пропорциональная угловому ускорению
Причиной ошибки настройки на моду является то, что при изменении угловой скорости в сигнале рассогласования цифровой системы регулировки периметра появляется составляющая пропорциональная угловому ускорению  где Δƒy - дополнительная составляющая в сигнале расстройки периметра гироскопа,
где Δƒy - дополнительная составляющая в сигнале расстройки периметра гироскопа,  - угловое ускорение гироскопа, а Т - период меандра. Возникновение Δƒy для случая постоянного углового ускорения приводит к тому, что система регулировки периметра стабилизирует периметр гироскопа в сдвинутой точке по расстройке ƒy.
- угловое ускорение гироскопа, а Т - период меандра. Возникновение Δƒy для случая постоянного углового ускорения приводит к тому, что система регулировки периметра стабилизирует периметр гироскопа в сдвинутой точке по расстройке ƒy.
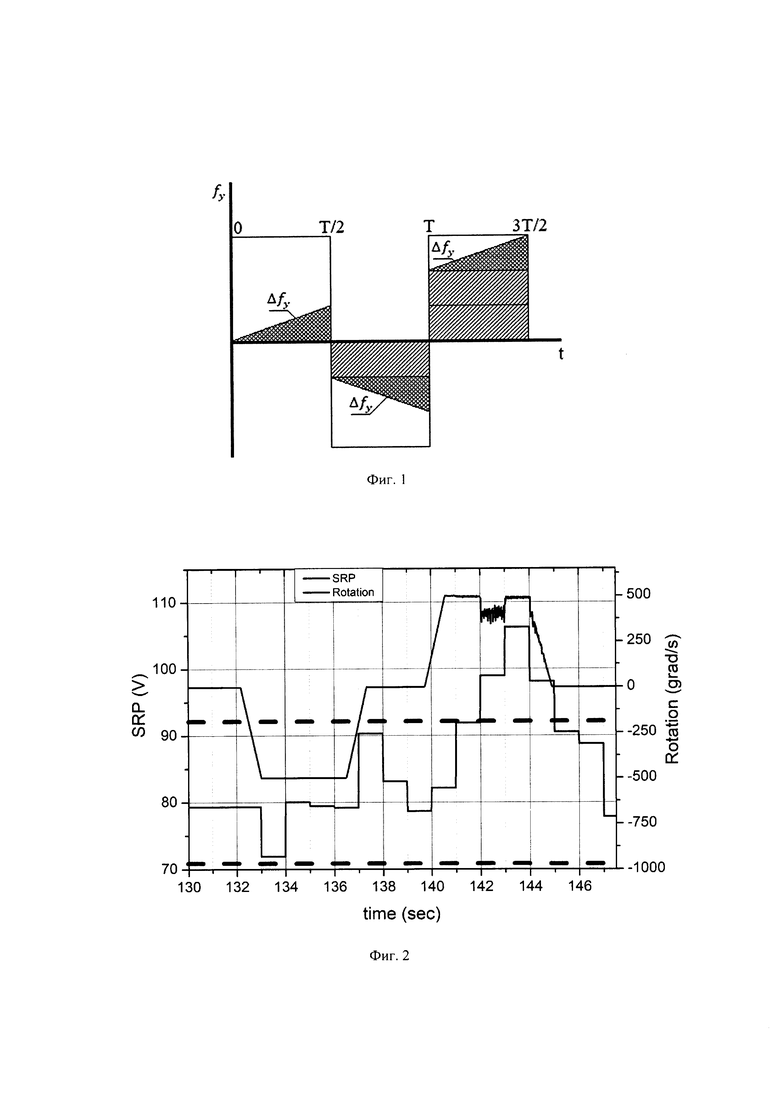
На Фиг. 1 показана зависимость расстройки ƒy от времени t, при приложении к датчику постоянного углового ускорения  Период съема данных совпадает своим началом с передним фронтом меандра, в каждом полупериоде меандра расстройка получает приращение Δƒy и сумма расстроек за период меандра не обнуляется, что не позволяет исключить ошибку Δƒy пропорциональную угловому ускорению.
Период съема данных совпадает своим началом с передним фронтом меандра, в каждом полупериоде меандра расстройка получает приращение Δƒy и сумма расстроек за период меандра не обнуляется, что не позволяет исключить ошибку Δƒy пропорциональную угловому ускорению.
На Фиг. 2 показаны экспериментальные зависимости напряжения на пьезокерамике датчика в вольтах (синяя сплошная линия) и значения измеренной угловой скорости вращения датчика в °/с (черная сплошная линия) от времени в процессе поворота датчика со скоростью 500°/с на угол поворота в 2160° сначала по часовой, а затем против часовой стрелки. Красным пунктиром показан рабочий диапазон пьезокерамики. Подстройка пьезокерамики происходила один раз за секунду. При повороте датчика по часовой стрелке ускорение датчика от 0 до 500°/с произошло точно за такт подстройки, поэтому пьезокерамика не вышла за пределы рабочего диапазона, так как ошибка Δƒy была скомпенсирована за один такт подстройки и не вывела пьезокерамику из рабочего диапазона. Однако, при вращении датчика против часовой стрелки процесс ускорения датчика был разделен между двумя тактами подстройки пьезокерамики, ошибка Δƒy компенсировалась системой регулировки периметра два такта, что привело к выходу пьезокерамики за пределы рабочего диапазона и ошибке в измерении угловой скорости вращения датчика уже после разгона до 500°/с, а также при уменьшении скорости вращения до 0°/с.
На Фиг. 3 показана зависимость расстройки ƒy от времени t, при приложении к датчику постоянного углового ускорения  Период съема, предложенный в изобретении, сдвинут на четверть периода от переднего фронта меандра. В каждом четверть периоде меандра расстройка получает приращение Δƒy. Сумма расстроек за период съема за время от Т/4 до 5Т/4 равняется нулю, что позволяет исключить составляющую расстройки пропорциональную угловому ускорению Δƒy и настроиться на моду без данной ошибки.
Период съема, предложенный в изобретении, сдвинут на четверть периода от переднего фронта меандра. В каждом четверть периоде меандра расстройка получает приращение Δƒy. Сумма расстроек за период съема за время от Т/4 до 5Т/4 равняется нулю, что позволяет исключить составляющую расстройки пропорциональную угловому ускорению Δƒy и настроиться на моду без данной ошибки.
Эффективность предложенного способа подтверждена испытаниями, проведенными на поворотном столе при тех же условиях, что и в случае с Фиг. 2, результаты которых представлены на Фиг. 4. Обозначения и оси на Фиг. 4. совпадают с Фиг. 2. На Фиг. 4 видно, что во время ускорения датчика в напряжении на пьезокерамике не возникает колебаний, связанных с ошибкой пропорциональной угловому ускорению.
Таким образом показано, что предложенный способ позволяет исключить ошибки измерения амплитуды частотной подставки и угловой скорости при изменении расстройки периметра из-за воздействия на гироскоп постоянных угловых ускорений.
Источники информации
1. Грушин М.Е., Колбас Ю.Ю., Горшков В.Н. Особенности работы системы регулировки периметра резонатора и вибрационная ошибка зеемановского лазерного гироскопа на 50%-ной смеси изотопов неона. ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. Приборостроение. 2018. №6. С. 5-86.
2. Вареник А.И., Горшков В.Н., Грушин М.Е., Иванов М.А., Колбас Ю.Ю., Савельев И.И. Цифровая система регулирования и стабилизации частоты четырехчастотного зеемановского лазерного гироскопа, Квантовая электроника. 2021. Т. 51, №3. С. 76-282. - прототип.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ПОДАВЛЕНИЯ ВЛИЯНИЯ МАГНИТНОГО ПОЛЯ НА ДРЕЙФ НУЛЯ В ЗЕЕМАНОВСКИХ ЧЕТЫРЕХЧАСТОТНЫХ И КВАЗИЧЕТЫРЕХЧАСТОТНЫХ ЛАЗЕРНЫХ ГИРОСКОПАХ | 2020 |
|
RU2750425C1 |
| Устройство регулировки периметра четырехчастотного зеемановского лазерного гироскопа | 2020 |
|
RU2744420C1 |
| Способ определения коэффициента чувствительности периметра резонатора зеемановского кольцевого лазера к воздействию линейных ускорений | 2020 |
|
RU2735490C1 |
| Способ и устройство для выделения информации о вращении в четырехчастотном зеемановском лазерном гироскопе | 2023 |
|
RU2810720C1 |
| Устройство регулировки периметра четырехчастотного зеемановского лазерного гироскопа | 2022 |
|
RU2796228C1 |
| ОПТИЧЕСКИЙ СМЕСИТЕЛЬ ИЗЛУЧЕНИЯ ЧЕТЫРЕХЧАСТОТНОГО ЛАЗЕРНОГО ГИРОСКОПА ЗЕЕМАНОВСКОГО ТИПА | 2019 |
|
RU2709428C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ПЕРИМЕТРА РЕЗОНАТОРА ЧЕТЫРЕХЧАСТОТНОГО ЛАЗЕРНОГО ГИРОСКОПА | 2022 |
|
RU2794241C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ ПЕРЕМЕЩЕНИЙ ЛАЗЕРНЫМ ГИРОСКОПОМ СО ЗНАКОПЕРЕМЕННОЙ ЧАСТОТНОЙ ПОДСТАВКОЙ | 2013 |
|
RU2531027C1 |
| Четырехчастотный лазерный гироскоп зеемановского типа | 2019 |
|
RU2731171C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ ПЕРЕМЕЩЕНИЙ ЛАЗЕРНЫМ ГИРОСКОПОМ | 2013 |
|
RU2525648C1 |

Изобретение относится к лазерной гироскопии. Технический результат - исключение ошибок измерения амплитуды частотной подставки и угловой скорости при изменении расстройки периметра из-за воздействия на гироскоп постоянных угловых ускорений. Результат достигается тем, что способ стабилизации и регулирования периметра четырехчастотного зеемановского лазерного гироскопа со знакопеременной магнитооптической частотной подставкой в форме меандра, включающий оптическое совмещение встречных волн каждой моды, оптическое разделение двух ортогонально поляризованных мод, получение интерференционных картин на двухплощадочных фотоприемниках, преобразование оптических сигналов интерференционных картин в синусоидальные электрические сигналы с частотой, равной разности частот встречных волн в двух модах, преобразующихся на компараторах в импульсные сигналы, формирование дискриминационной характеристики системы регулирования периметра по разности частот подставок двух мод за положительный и отрицательный полупериоды меандра и подстройку периметра лазера с помощью пьезозеркал в рабочую точку равенства амплитуд частотных подставок двух мод, отличается тем, что съем выходных данных такого гироскопа смещают на четверть периода относительно переднего фронта меандра. 4 ил.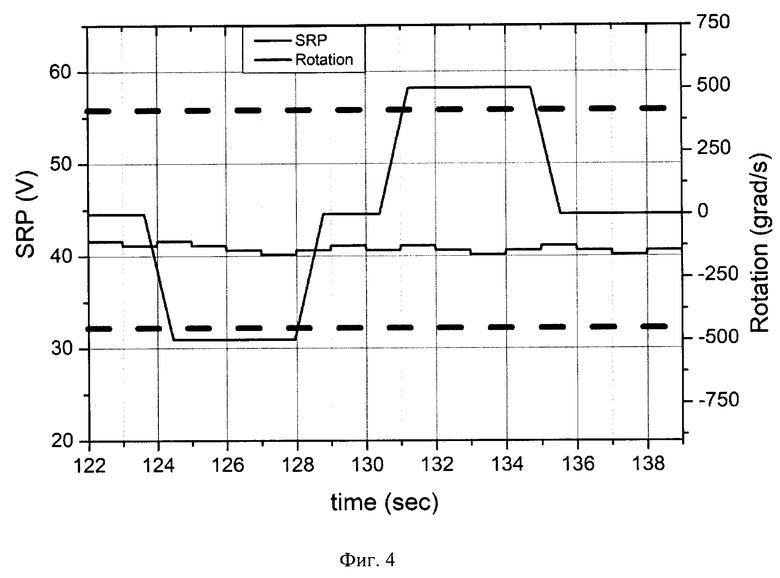
Способ стабилизации и регулирования периметра четырехчастотного зеемановского лазерного гироскопа со знакопеременной магнитооптической частотной подставкой в форме меандра, включающий оптическое совмещение встречных волн каждой моды, оптическое разделение двух ортогонально поляризованных мод, получение интерференционных картин на двухплощадочных фотоприемниках, преобразование оптических сигналов интерференционных картин в синусоидальные электрические сигналы с частотой, равной разности частот встречных волн в двух модах, преобразующихся на компараторах в импульсные сигналы с учетом знака разности частот встречных волн, формирование дискриминационной характеристики системы регулирования периметра по разности частот подставок двух мод за положительный и отрицательный полупериоды меандра и подстройку периметра лазера с помощью пьезозеркал в рабочую точку равенства амплитуд частотных подставок двух мод, отличающийся тем, что съем выходных данных четырехчастотного зеемановского лазерного гироскопа смещают на четверть периода относительно переднего фронта меандра.
| СПОСОБ РЕГУЛИРОВАНИЯ ПЕРИМЕТРА РЕЗОНАТОРА ЧЕТЫРЕХЧАСТОТНОГО ЛАЗЕРНОГО ГИРОСКОПА | 2022 |
|
RU2794241C1 |
| Устройство регулировки периметра четырехчастотного зеемановского лазерного гироскопа | 2020 |
|
RU2744420C1 |
| Четырехчастотный лазерный гироскоп зеемановского типа | 2019 |
|
RU2731171C1 |
| US 4475199 A1, 02.10.1984 | |||
| Вареник А.И | |||
| et al | |||
| "Цифровая система регулирования и стабилизации частоты четырехчастотного зеемановского лазерного гироскопа", журнал "Квантовая электроника", 2021, Т.51, N3. | |||

