Изобретение относится к области высокоточной лазерной гироскопии, а именно к четырехчастотным и квазичетырехчастотным лазерным гироскопам зеемановского типа.
В зеемановских лазерных гироскопах используют чувствительность к магнитному полю частот генерируемых волн круговых поляризаций, чтобы наложением магнитного поля на усиливающую активную среду вывести рабочую характеристику в линейную область. В зеемановских четырехчастотных и квазичетырехчастотных лазерных гироскопах противоположное влияние магнитного поля на волны ортогональных круговых поляризаций используется в целях компенсации магнитной составляющей ошибки измерений. Чувствительность к магнитному полю волн ортогональных круговых поляризаций имеет обратные знаки, однако величина чувствительности не всегда совпадает, что определяется зеемановским расщеплением уровней, а также зависит от аномальной дисперсии усиливающей активной среды. Как следствие, зеемановские четырехчастотные и квазичетырехчастотные лазерные гироскопы имеют остаточную магнитную чувствительность, на максимальное подавление которой направлено изобретение.
Наиболее близкой по технической сути к предлагаемому изобретению является система активной настройки магнитного поля (САНМП) [1]. В САНМП изложено аналоговое подавление магнитного поля в четырехчастотном лазерном гироскопе с неплоским контуром и разностью частот между волнами ортогональных круговых поляризаций 860 МГц.
В САНМП реализуется модуляция параметров генерируемых четырех волн двумя различными способами. Во-первых, система регулирования периметра создает модуляцию длины периметра оптического резонатора и, как следствие, частот генерируемых четырех волн. Во-вторых, модулирование величины накладываемого на усиливающую активную среду магнитного поля катушек, намотанных поверх усиливающей активной среды, обеспечивает модуляцию суммарных амплитуд волн, распространяющихся во встречных направлениях. Применение управляемой модуляции и последующей демодуляции параметров излучения позволяет по выходным сигналам от волн ортогональных круговых поляризаций осуществлять контроль разности интенсивностей пар волн ортогональных круговых поляризаций и рассчитывать соответствующую величину ошибки измерений. Для компенсации ошибки применяется выравнивание интенсивностей пар волн ортогональных круговых поляризаций путем реализации обратной связи и выведения в оптимальную рабочую точку генерируемых четырех волн регулированием периметра оптического резонатора и наложением на усиливающую активную среду управляемого электрическим током магнитного поля. Представлена блок-схема, предназначенная для удержания четырехчастотного лазерного гироскопа с неплоским контуром и разностью частот между волнами ортогональных круговых поляризаций 860 МГц в оптимальной рабочей точке с наименьшей разностью интенсивностей пар волн ортогональных круговых поляризаций. Хотя САНМП реализована с использованием аналоговой системы регулирования периметра, в числе изобретений тех же авторов есть вариант реализации цифровой системы регулирования периметра [2].
Недостатком САНМП является использование однонаправленного продольного магнитного поля, накладываемого на усиливающую активную среду. В САНМП за основу взято постоянное невзаимное расщепление спектра генерации, величина которого в дальнейшем подвергается модуляции. При использовании однонаправленного магнитного поля представляется невозможным разделить влияние управляемого магнитного поля и внешнего магнитного поля, так как на усиливающую активную среду воздействует их суперпозиция.
Система разработана для четырехчастотного лазерного гироскопа с неплоским контуром и разностью частот между волнами ортогональных круговых поляризаций 860 МГц, возможность ее применения на четырехчастотных и квазичетырехчастотных лазерных гироскопах произвольной конфигурации не рассмотрена.
Авторами САНМП заявлено выравнивание дисперсии усиливающей активной среды для пар волн ортогональных круговых поляризаций, однако из описания САНМП следует, что реализуется только выравнивание интенсивностей пар волн ортогональных круговых поляризаций. Интенсивность пар волн ортогональных круговых поляризаций определяется не только дисперсией усиливающей активной среды, но и коэффициентами пропускания, рассеяния для каждой отдельной пары волн ортогональных круговых поляризаций, а также фотоприемниками, детектирующими сигналы каждой отдельной пары волн ортогональных круговых поляризаций, - все перечисленные факторы не учтены в САНМП.
Математическая модель, лежащая в основе САНМП, описывает работу четырехчастотного лазерного гироскопа исключительно с точки зрения близости длины периметра оптического резонатора, определяющего оптические частоты генерации, и величины прикладываемого к усиливающей активной среде магнитного поля к значениям, соответствующим оптимуму. При этом параметры генерации четырех волн: коэффициенты усиления, насыщения, кросс насыщения, связи - не приняты к рассмотрению, в то время как именно они определяют оптимальную рабочую точку для конкретного четырехчастотного или квазичетырехчастотного лазерного гироскопа.
Техническим результатом предлагаемого изобретения является создание системы подавления влияния магнитного поля на дрейф нуля в зеемановских четырехчастотных и квазичетырехчастотных лазерных гироскопах, отличающейся обеспечением равенства чувствительностей к магнитному полю частот волн ортогональных круговых поляризаций при изменениях магнитного поля и длины периметра резонатора гироскопа, применением модуляции знакопеременного магнитного поля зеемановской частотной подставки, определением сигнала, управляющего величиной связи встречных волн с учетом коэффициентов усиления, насыщения, кросс насыщения и взаимо-рассеяния встречных волн, использованием катушки магнитного экранирования.
Результат достигается реализацией устойчивого режима работы лазерного гироскопа в рабочей точке при изменениях магнитного поля и длины периметра резонатора за счет минимизации первых производных зависимости суммы разностей частот встречных волн ортогональных круговых поляризаций от магнитного поля и от оптической длины периметра резонатора, созданием в катушке магнитного экранирования магнитного поля, равного по величине и противоположного по направлению внешнему магнитному полю.
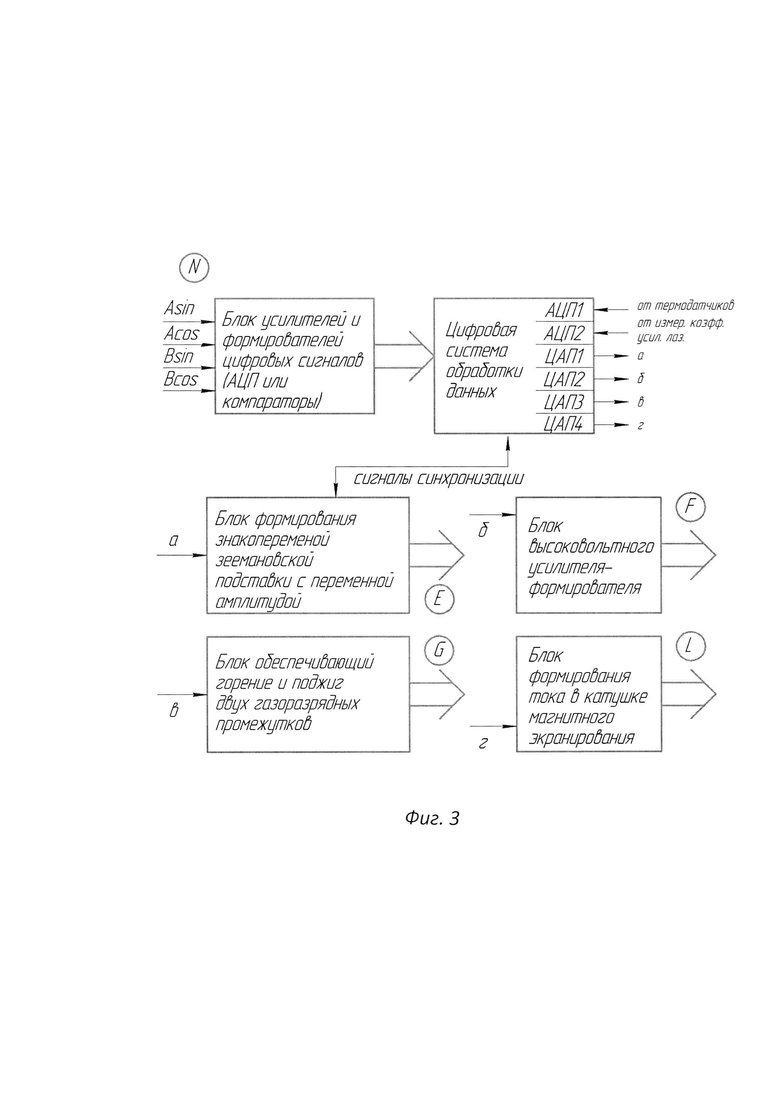
Система подавления влияния магнитного поля на дрейф нуля в зеемановских четырехчастотных и квазичетыречастотных лазерных гироскопах включает блок усилителей и формирователей цифровых сигналов для измерения интенсивности встречных волн ортогональных поляризаций, распространяющихся в гироскопе; блок для формирования знакопеременной зеемановской подставки с переменной амплитудой; блок для обеспечения горения и поджига двух газоразрядных промежутков; блок для формирования тока в катушке магнитного экранирования; блок высоковольтного усилителя-формирователя для управления системой регулирования периметра резонатора; цифровую систему для обработки данных, поступающих с блоков, формирования управляющих ими сигналов и их синхронизации, обеспечения равенства величин чувствительностей к воздействию магнитного поля волн ортогональных круговых поляризаций.
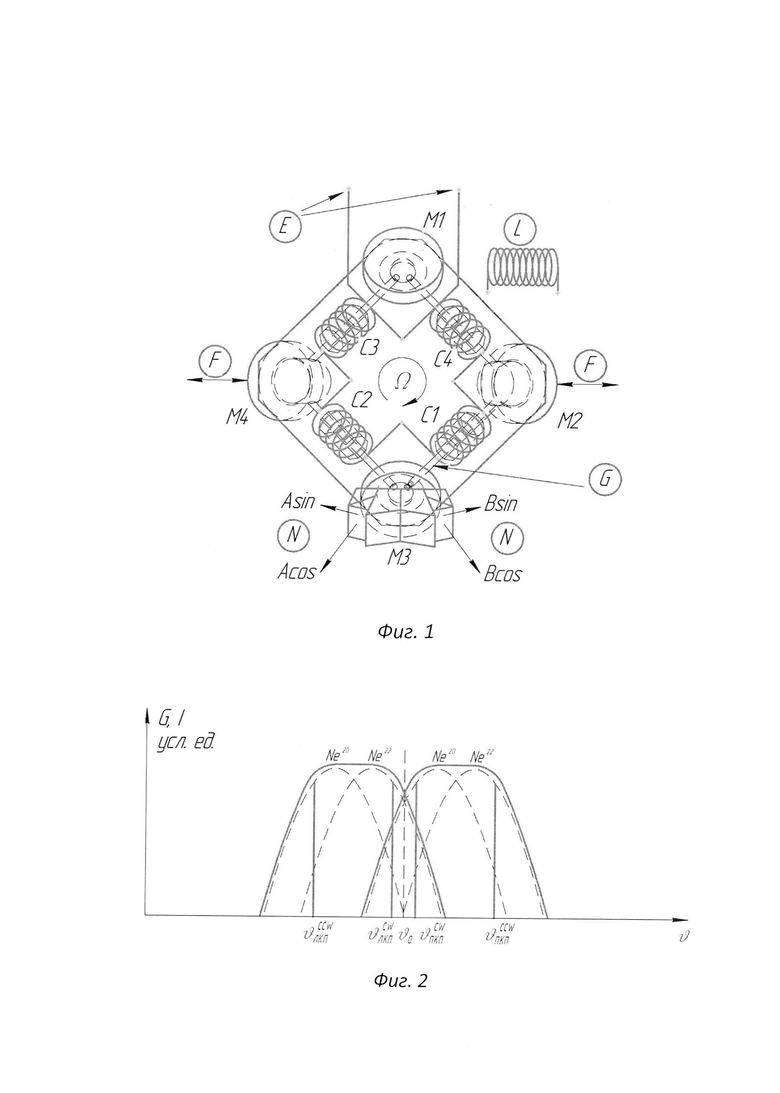
На Фиг. 1 изображен общий вид четырехчасотного лазерного гироскопа: сферическое зеркало M1, пьезозеркала М2 и М4, плоское выходное зеркало М3 с оптическим смесителем излучения, катушки C1, С2, С3, С4 знакопеременной зеемановской магнитооптической частотной подставки. F - высоковольтный управляющий сигнал для пьезодвигателей, вырабатываемый системой регулирования периметра (СРП) по заданному алгоритму, Е - ток в катушках, создаваемый знакопеременной зеемановской подставкой, N - сигналы биений встречных волн для ортогональных круговых поляризаций, G - токи и напряжения, обеспечивающие горение и поджиг разряда в газоразрядных промежутках, L - ток в катушке магнитного экранирования.
На Фиг. 2 изображен расщепленный за счет эффекта Зеемана контур усиления и расположение в нем двух пар взаимно ортогональных круговых поляризаций. Контур уширен за счет использования гелий-неоновой газовой смеси с двумя изотопами Ne20, Ne22.
На Фиг. 3 Изображена блок-схема системы подавления влияния магнитного поля на дрейф нуля.
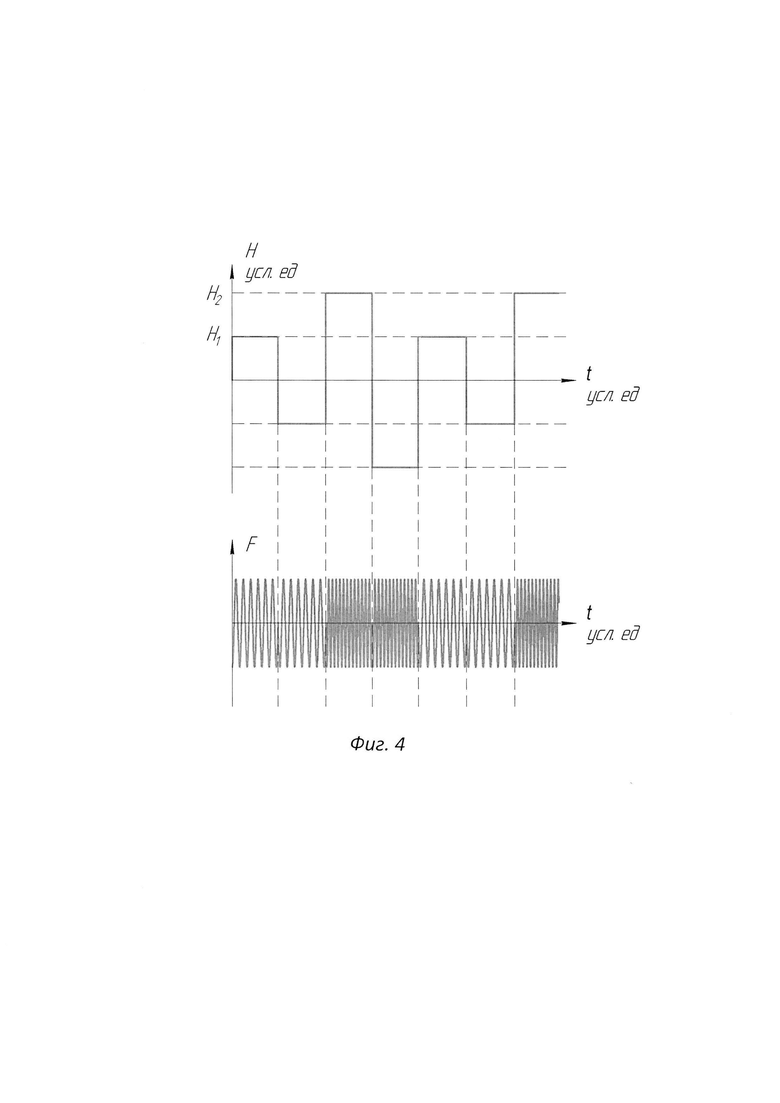
На Фиг. 4 изображен график зависимости величины магнитного поля, создаваемого катушками, намотанными вокруг газоразрядных промежутков, и соответствующий ему график зависимости сигнала биений встречных волн одной из поляризаций от времени. Ток в катушках создается блоком формирования знакопеременной зеемановской подставки с переменной амплитудой.
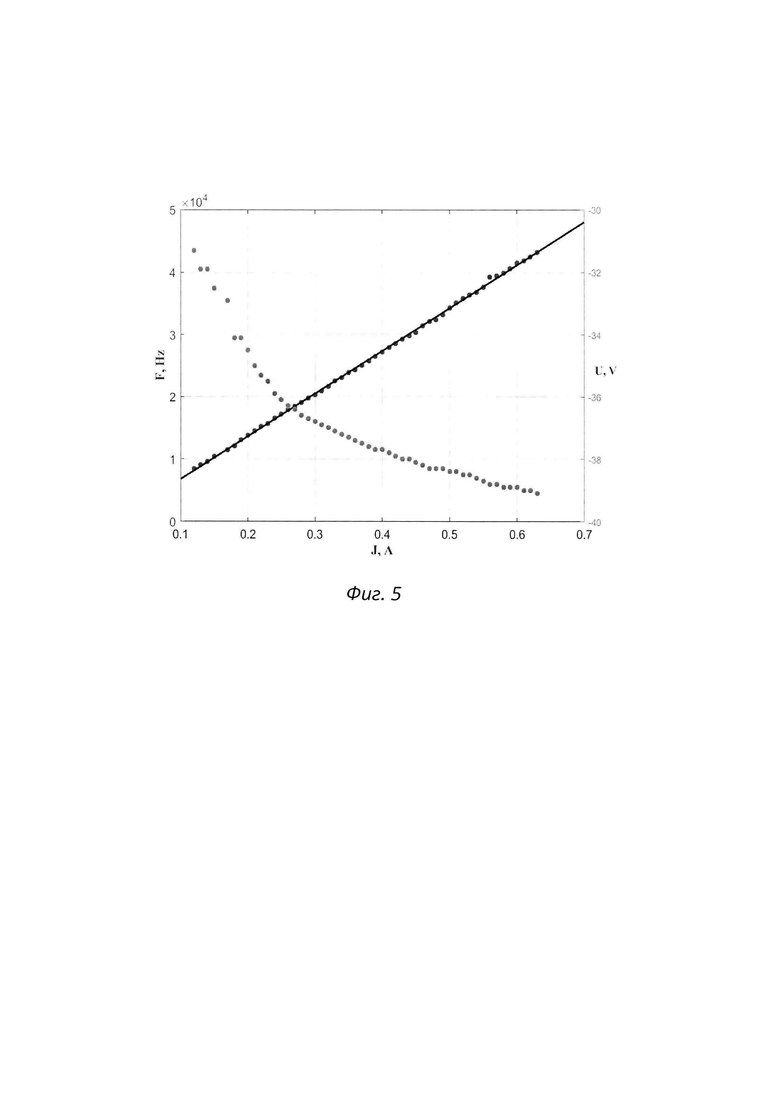
На Фиг. 5 изображен график зависимости величины знакопеременной зеемановской подставки (F) и напряжения (U) в системе СРП, соответствующих равенству подставок для ортогональных мод, от тока в катушках (J).
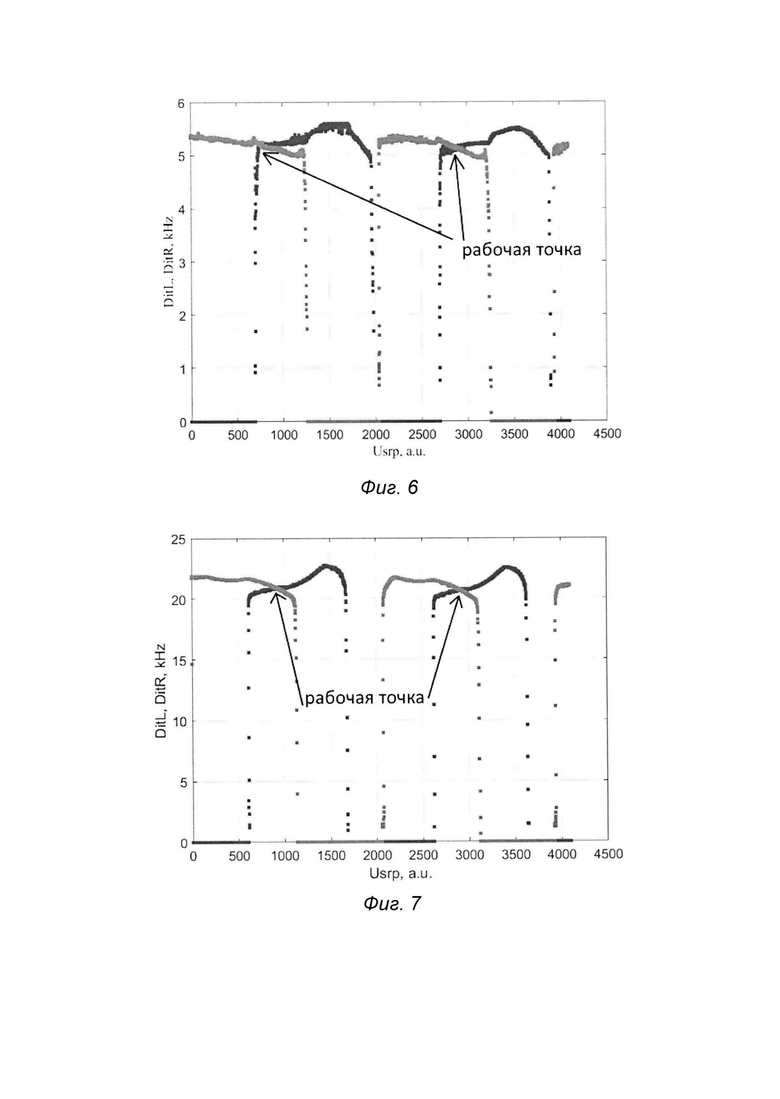
На Фиг. 6 и Фиг. 7 изображен график зависимости величин подставок от перестройки длины резонатора для ортогональных поляризаций. Рабочая точка, соответствующая равенству этих подставок (точка пересечения), при оптимальных магнитных полях оказывается ближе к середине области существования волн ортогональных поляризаций (Фиг. 7), при малых величинах магнитного поля - смещена к краю (Фиг. 6).
В четырехчастотном режиме работы лазерного гироскопа с учетом рассеяния излучения динамика генерации описывается системой уравнений:
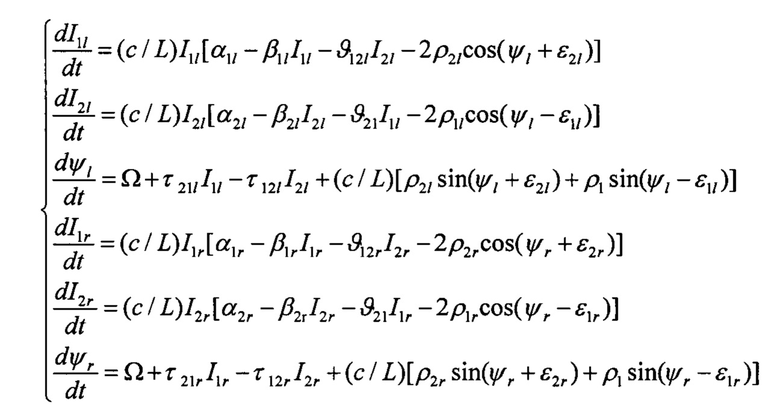
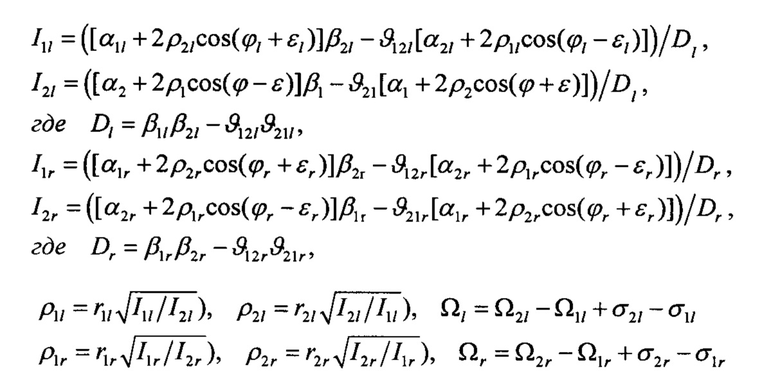
Соответствующие интенсивности излучения определяются как:
 - безразмерные интенсивности встречных волн ортогональных поляризаций;
- безразмерные интенсивности встречных волн ортогональных поляризаций;
 - разности коэффициентов усиления и потерь ортогональных поляризаций;
- разности коэффициентов усиления и потерь ортогональных поляризаций;
 - коэффициенты насыщения каждой из волн;
- коэффициенты насыщения каждой из волн;
 - коэффициенты кросс насыщения каждой из волн;
- коэффициенты кросс насыщения каждой из волн;
 - коэффициенты связи, обусловленные обратным рассеянием.
- коэффициенты связи, обусловленные обратным рассеянием.
Решение данной системы уравнений определяет величину амплитудной модуляции интенсивности и сдвиг фазы колебаний каждой из четырех волн и, тем самым, позволяет найти по амплитудам модуляции встречных волн и фазе колебаний сигнал, отвечающий за величину связи встречных волн.
Выведение и удержание лазерного гироскопа в рабочей точке выполняется системой регулирования длины периметра оптического резонатора. Определение системой оптимальной рабочей точки происходит по двум критериям.
Во-первых, обеспечивается равенство мощностей генерации волн ортогональных круговых поляризаций. Критерий является первым приближением и используется сразу после поджига газового разряда.
Во-вторых, достигается равенство величины знакопеременных частотных подставок волн ортогональных круговых поляризаций. Второй критерий выполняет роль тонкой настройки после достижения выполнения первого критерия.
В-третьих, настраиваются величины производных, обеспечивающие их минимизацию и равенство магнитных чувствительностей при изменении магнитного поля и длины периметра резонатора. Что является сверхтонким критерием настройки положения рабочей точки гироскопа.
Выполнение трех критериев обеспечивает равенство величин чувствительностей к воздействию магнитного поля волн ортогональных круговых поляризаций, знаки чувствительностей при этом противоположные.
Изменение величины магнитного поля приводит к изменению областей возможных значений частот волн ортогональных круговых поляризаций (Фиг. 6, 7) в спектре генерации [3], при этом меняется амплитуда сигналов биений встречных волн, а рабочая точка, определяемая равенством величин магнитных чувствительностей, смещается (Фиг. 5-7).
Рост величины магнитного поля частотной подставки приводит к уменьшению крутизны зависимости от тока в катушках (Фиг. 5) и одновременно выравниванию амплитуд сигналов биений волн ортогональных круговых поляризаций. Таким образом, при работе на пологом участке зависимости величины магнитного поля частотной подставки от тока в катушках, где производная зависимости близка к нулю, изменение магнитного поля не смещает рабочую точку лазерного гироскопа. Гироскоп в этом случае обладает меньшей остаточной магнитной чувствительностью и более высокой стабильностью характеристик. При этом рабочая точка напряжения системы регулирования периметра удерживается вблизи центра области возможных значений частот волн ортогональных круговых поляризаций в спектре генерации (Фиг. 7).
Для удержания гироскопа в рабочей точке при росте напряженности внешних магнитных полей дополнительно используется катушка магнитного экранирования, в которой создается поле, равное по величине и противоположное по направлению внешнему магнитному полю. Управляющий сигнал, определяющий ток в этой катушке, вырабатывается на основе данных получаемых из сигналов биений встречных волн ортогоналных поляризаций в блоке цифровой системы обработки данных (Фиг. 3).
Источники
1. Тае W. Hahn, Daniel A. Tazartes, John G. Mark. Active magnetic field tuning for dispersion equalization of a multi-oscillator. Патент США US 5374990 A.
2. John G. Mark, Daniel A. Tazartes, Tae W. Hahn. Multioscillator ring laser gyroscope adaptive digitally controlled cavity length control system. Патент США US 5208653 A.
3. Назаренко M.M., Савельев И.И., Скулаченко С.С., Хромых A.M., Юдин И.И. Взаимодействие мод с ортогональными круговыми поляризациями в кольцевом зеемановском лазере // Квантовая электроника. 1979. Т. 6. №8. С. 1698-1704.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РЕГУЛИРОВАНИЯ ПЕРИМЕТРА РЕЗОНАТОРА ЧЕТЫРЕХЧАСТОТНОГО ЛАЗЕРНОГО ГИРОСКОПА | 2022 |
|
RU2794241C1 |
| Четырехчастотный лазерный гироскоп зеемановского типа | 2019 |
|
RU2731171C1 |
| Устройство регулировки периметра четырехчастотного зеемановского лазерного гироскопа | 2020 |
|
RU2744420C1 |
| ОПТИЧЕСКИЙ СМЕСИТЕЛЬ ИЗЛУЧЕНИЯ ЧЕТЫРЕХЧАСТОТНОГО ЛАЗЕРНОГО ГИРОСКОПА ЗЕЕМАНОВСКОГО ТИПА | 2019 |
|
RU2709428C1 |
| Способ стабилизации и регулирования периметра четырехчастотного зеемановского лазерного гироскопа со знакопеременной магнитооптической частотной подставкой в форме меандра | 2023 |
|
RU2805770C1 |
| Устройство регулировки периметра четырехчастотного зеемановского лазерного гироскопа | 2022 |
|
RU2796228C1 |
| Способ определения коэффициента чувствительности периметра резонатора зеемановского кольцевого лазера к воздействию линейных ускорений | 2020 |
|
RU2735490C1 |
| СИСТЕМА РЕГУЛИРОВКИ ПЕРИМЕТРА ЗЕЕМАНОВСКОГО ЛАЗЕРНОГО ГИРОСКОПА | 2015 |
|
RU2589756C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ ПЕРЕМЕЩЕНИЙ ЛАЗЕРНЫМ ГИРОСКОПОМ СО ЗНАКОПЕРЕМЕННОЙ ЧАСТОТНОЙ ПОДСТАВКОЙ | 2013 |
|
RU2531027C1 |
| Способ и устройство для выделения информации о вращении в четырехчастотном зеемановском лазерном гироскопе | 2023 |
|
RU2810720C1 |
Изобретение относится к области высокоточной лазерной гироскопии. Технический результат – подавление влияния магнитного поля на дрейф нуля в зеемановских четырехчастотных и квазичетырехчастотных лазерных гироскопах. Результат достигается реализацией устойчивого режима работы лазерного гироскопа в рабочей точке, обеспечивающей минимизацию первых производных зависимости суммы разностей частот встречных волн ортогональных круговых поляризаций от магнитного поля и длины периметра резонатора, созданием в катушке магнитного экранирования магнитного поля, равного по величине и противоположного по направлению внешнему магнитному полю. 7 ил.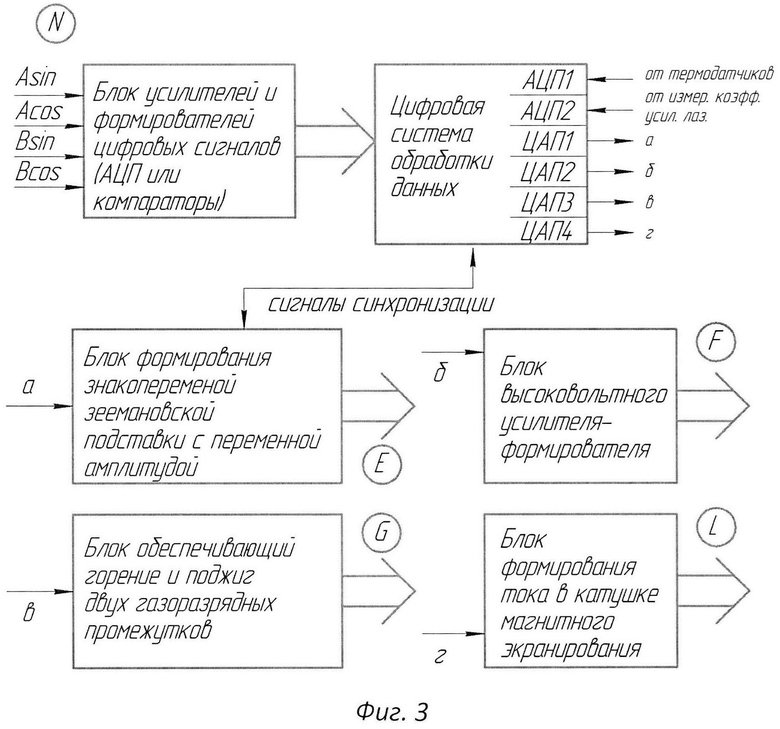
Система подавления влияния магнитного поля на дрейф нуля в зеемановских четырехчастотных и квазичетыречастотных лазерных гироскопах, включающая блок усилителей и формирователей цифровых сигналов для измерения интенсивности встречных волн ортогональных поляризаций, распространяющихся в гироскопе; блок для формирования знакопеременной зеемановской подставки с переменной амплитудой; блок для обеспечения горения и поджига двух газоразрядных промежутков; блок для формирования тока в катушке магнитного экранирования; блок высоковольтного усилителя-формирователя для управления системой регулирования периметра резонатора; цифровую систему для обработки данных, поступающих с блоков формирования, управляющих ими сигналов и их синхронизации, обеспечения равенства величин чувствительностей к воздействию магнитного поля волн ортогональных круговых поляризаций.
| US 5374990 A, 20.12.1994 | |||
| Способ уменьшения магнитного дрейфа зеемановских лазерных гироскопов | 2018 |
|
RU2695761C1 |
| СИСТЕМА РЕГУЛИРОВКИ ПЕРИМЕТРА ЗЕЕМАНОВСКОГО ЛАЗЕРНОГО ГИРОСКОПА | 2015 |
|
RU2589756C1 |
| US 5448354 A, 05.09.1995. | |||

