Область техники, к которой относится изобретение
Изобретение относится к области управления летательными аппаратами, и, более конкретно, к способу выбора безопасной зоны посадки для летательного аппарата.
Уровень техники
Беспилотные летательные аппараты (БПЛА, UAV) постепенно становятся частью повседневной жизни – они выполняют доставку грузов, различные исследования, анализ окружающего пространства, мониторинг территорий, контроль объектов, фото- и видеосъемку, используются в спасательных операциях и находят множество других применений. Как и в случае с другими видами транспорта, по всему миру ведутся разработки, направленные на полную автоматизацию работы БПЛА.
Одной из задач автоматизации БПЛА является его автономная посадка. Из уровня техники известно множество различных способов, которые можно условно разделить на 2 группы: посадка на подготовленную поверхность – например, на посадочную площадку, и на неподготовленную поверхность – например, на поверхность земли.
Посадка на поверхность земли часто является непредсказуемой и сложной, однако время от времени могут возникать ситуации, когда во избежание утраты ценного груза или самого летательного аппарата приходится прибегать к этому способу.
Известные способы (см., например, патент RU 2725640 C1 от 03.07.2020) не обеспечивают достаточную точность определения зоны, в которую следует выполнять посадку, в сложных условиях окружающей среды или если летательный аппарат оснащен недорогим оборудованием, обладающим ограниченными возможностями. Это негативно сказывается на безопасности полета, в том числе на безопасности груза, летательного аппарата, людей, животных, объектов в зоне посадки и т.д.
Таким образом, в уровне техники существует потребность в создании способа, который обеспечивал бы возможность экстренной посадки БПЛА в широком диапазоне условий окружающей среды и был бы доступен для БПЛА, обладающих ограниченными возможностями.
Сущность изобретения
Настоящее изобретение направлено на создание способов и устройств, позволяющих устранить по меньшей мере некоторые из указанных выше недостатков предшествующего уровня техники.
В частности, предложен способ выбора безопасной зоны посадки, содержащий этапы, на которых:
с помощью одного или более установленных на летательном аппарате (ЛА) трехмерных (3D) датчиков получают трехмерное облако точек, характеризующее пространство под ЛА;
преобразуют облако точек в набор плоских ячеек, описывающих поверхности объектов и рельеф местности, при этом точки из облака точек, не принадлежащие ни одной поверхности, исключают из облака точек;
выполняют поиск препятствий среди набора ячеек;
для каждой ячейки, которая не определена как препятствие, выполняют этапы, на которых:
- формируют предполагаемую область посадки на основе текущей ячейки,
- определяют ровность поверхности предполагаемой области посадки,
- определяют угол наклона предполагаемой области посадки,
- определяют удаленность текущей ячейки от препятствий,
- присваивают текущей ячейке уровень безопасности посадки в соответствии с удаленностью текущей ячейки от препятствий, а также в соответствии с показателем ровности поверхности и углом наклона предполагаемой области посадки, сформированной на основе текущей ячейки; и
выбирают зону посадки на основе уровня безопасности посадки ячеек.
В одном из вариантов осуществления предполагаемой областью посадки является область, в которую может произвести посадку ЛА, или областью, в которую ЛА может разместить груз;
при этом способ дополнительно содержит этап, на котором выполняют посадку и/или размещение груза в выбранную зону посадки.
В одном из вариантов осуществления формирование предполагаемой области посадки на основе текущей ячейки содержит этапы, на которых:
определяют размеры и форму ячейки; и
если размеры и форма ячейки позволяют вписать в нее область, необходимую для посадки, определяют текущую ячейку как предполагаемую область посадки.
В одном из вариантов осуществления формирование предполагаемой области посадки на основе текущей ячейки дополнительно содержит этапы, на которых:
если размеры и форма ячейки не позволяют вписать в нее область, необходимую для посадки, выполняют попытку получения укрупненной ячейки путем объединения текущей ячейки со всеми ячейками, с которыми она имеет общую границу, кроме ячеек, определенных как препятствие, при этом выполняют укрупнение до тех пор, пока не будет достигнут предел возможности укрупнения или пока не будет получена укрупненная ячейка, удовлетворяющая следующим условиям: размеры и форма укрупненной ячейки позволяют вписать в нее область, необходимую для посадки, используя при этом по меньшей мере часть текущей ячейки;
если укрупнение завершилось успехом, определяют укрупненную ячейку как предполагаемую область посадки; и
если укрупнение завершилось неудачей, определяют текущую ячейку как препятствие.
В одном из вариантов осуществления выполнение поиска препятствий среди набора ячеек содержит этапы, на которых для каждой ячейки:
определяют координаты и угол наклона ячейки относительно осей X и Y; и
если угол наклона и высота проекции ячейки на вертикальную плоскость одновременно превышают допустимые пределы угла наклона и высоты, определяют ячейку как препятствие.
В одном из вариантов осуществления преобразование облака точек в набор ячеек выполняют методом шагающих кубиков или методом двойного контура, частично или полностью восстанавливая дефекты поверхности, имеющиеся в облаке точек, или методом консенсуса случайной выборки.
В одном из вариантов осуществления способ дополнительно содержит этап, на котором:
определяют высоту расположения предполагаемой области посадки;
при этом выбирают зону посадки дополнительно на основе высоты расположения предполагаемой области посадки.
В одном из вариантов осуществления способ дополнительно содержит этапы, на которых:
определяют, что возникла экстренная ситуация; и
определяют ранг экстренной ситуации на основе типа возникшей экстренной ситуации.
В одном из вариантов осуществления способ дополнительно содержит этап, на котором:
оценивают время, доступное для посадки, в зависимости от ранга экстренной ситуации;
при этом выбирают зону посадки дополнительно на основе времени, доступного для посадки.
В одном из вариантов осуществления способ дополнительно содержит этапы, на которых:
определяют, требуется ли экстренный сброс груза, на основе предварительно заданных условий экстренного сброса груза и ранга экстренной ситуации; и
выполняют экстренный сброс груза, если он требуется.
Технический результат
Настоящее изобретение позволяет повысить эффективность устройств, систем и способов для посадки летательного аппарата (ЛА). При этом обеспечивается:
- повышение точности, в том числе при сложных условиях окружающей среды;
- снижение требований к характеристикам датчиков ЛА;
- повышение безопасности полета, в том числе безопасности груза, летательного аппарата, людей, животных, объектов в зоне посадки и т.д.
Эти и другие преимущества настоящего изобретения станут понятны при прочтении нижеследующего подробного описания со ссылкой на сопроводительные чертежи.
Краткое описание чертежей
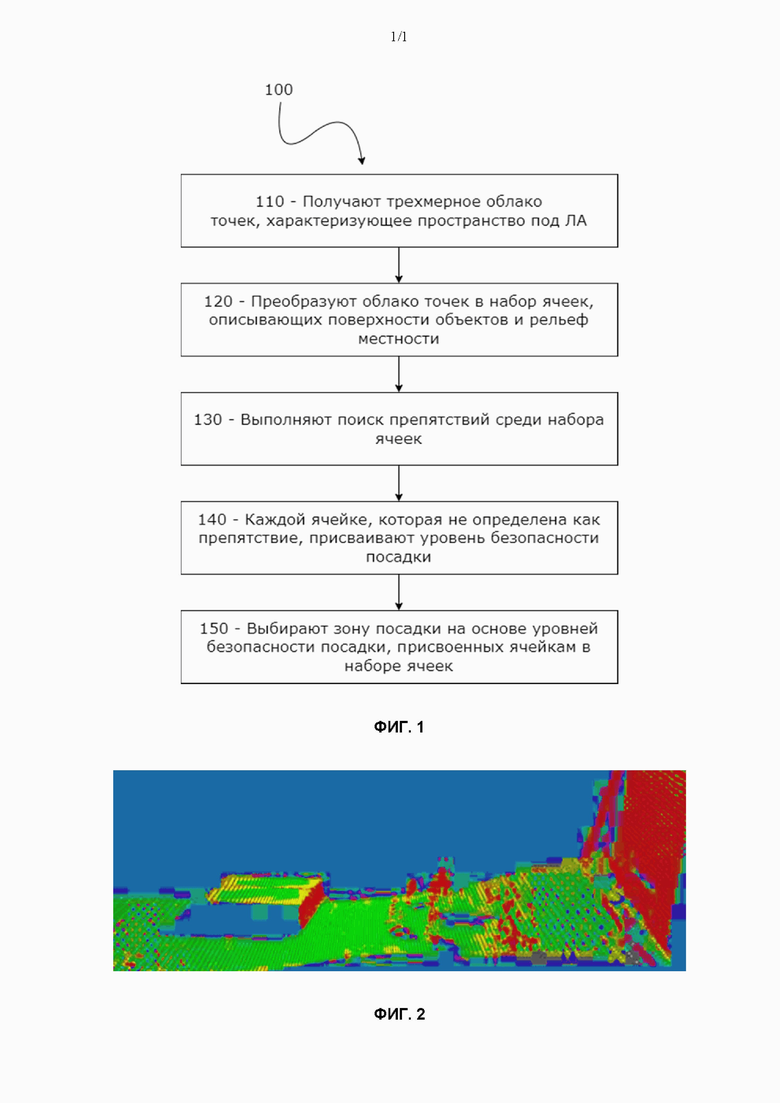
На Фиг. 1 показана блок-схема предложенного способа.
На Фиг. 2 показан пример разметки ячеек для выбора зоны посадки.
Подробное описание
В качестве БПЛА для целей настоящего изобретения может рассматриваться, например, дрон, квадрокоптер, мультикоптер, беспилотный вертолет, самолет вертикального взлета и посадки (СВВП, VTOL) или любой другой летательный аппарат, на который установлено или может быть установлено оборудование, необходимое для выполнения предложенного способа.
Беспилотный летательный аппарат (БПЛА) может содержать корпус, движители, двигатели, посадочное шасси, модуль управления двигателями, полетный контроллер, приемопередатчик, модуль навигации, источник энергии, камеру, набор датчиков. Конкретный набор элементов БПЛА и их компоновка не ограничиваются настоящим изобретением.
Дальнейшее описание для удобства будет ссылаться на БПЛА, однако следует понимать, что при необходимости возможно применение настоящего изобретения в пилотируемых летательных аппаратах. Кроме того, может применяться дистанционно пилотируемый летательный аппарат. Предпочтительно, чтобы летательный аппарат (ЛА) имел возможность временного зависания в одном положении в пространстве.
БПЛА может нести груз, выполняя, например, функцию доставки. В другом варианте осуществления БПЛА может выполнять иные функции, без несения груза.
В процессе выполнения полетной миссии БПЛА может возникнуть экстренная ситуация – например, может быть потерян, зашумлен или искажен сигнал от оператора или сигнал связи с базовой станцией, может произойти ошибка навигации или сбой системы навигации, заряд батареи или запас топлива может опуститься до порогового значения, может произойти повреждение (например, может не работать 1 двигатель в результате столкновения с препятствием), и т.д.
Определив, что возникла экстренная ситуация, во избежание утраты ценного груза или самого летательного аппарата блок управления БПЛА (например, полетный контроллер или иной вычислительный блок, установленный на БПЛА) может принять решение – самостоятельно или с участием оператора (при наличии такой возможности) – о необходимости экстренной посадки.
Приняв решение о необходимости экстренной посадки, в простейшем случае БПЛА может приземлиться просто вниз, однако такой подход может быть опасен для груза, летательного аппарата, людей, животных, объектов в зоне приземления и т.д. Соответственно, требуется выбор зоны посадки, оптимальной с точки зрения минимизации опасности.
Способ выбора безопасной зоны посадки
Далее со ссылкой на Фиг. 1 будет описан способ 100 выбора безопасной зоны посадки согласно настоящему изобретению.
На этапе 110 с помощью одного или более установленных на БПЛА 3D-датчиков получают трехмерное облако точек, характеризующее пространство под БПЛА. В качестве 3D-датчика может использоваться, например, лидар или камера глубины, которая сканирует пространство под БПЛА и выдает трехмерное облако точек. В предпочтительном варианте осуществления в процессе сканирования пространства БПЛА зависает в одном положении.
Далее на этапе 120 с помощью вышеупомянутого блока управления преобразуют полученное облако точек в набор плоских ячеек, описывающих поверхности объектов и рельеф местности, попавшие в область обзора 3D-датчиков и, соответственно, в облако точек. Те точки из облака точек, которые в конечном счете не будут отнесены ни к одной ячейке (то есть не принадлежащие ни одной поверхности), исключаются из рассмотрения как шум. Полученные ячейки представляют собой треугольники, четырехугольники или иные плоские многоугольники, охватывающие собой поверхности объектов, земную поверхность, водную поверхность и т.д.
Далее на этапе 130 с помощью блока управления выполняют поиск препятствий среди набора ячеек. Например, некоторые поверхности могут характеризовать такие объекты, как деревья, столбы, люди и т.д. Ячейки, отнесенные к этим объектам, определяются как препятствие. Кроме того, этим ячейкам может быть присвоен уровень безопасности посадки, указывающий на невозможность посадки в данной ячейке.
Затем каждой ячейке, которая не определена как препятствие, с помощью блока управления на этапе 140 присваивают уровень безопасности посадки. В частности, на этапе 141 формируют предполагаемую область посадки на основе текущей ячейки, на этапе 142 определяют ровность поверхности предполагаемой области посадки, на этапе 143 определяют угол наклона предполагаемой области посадки, на этапе 144 определяют удаленность текущей ячейки от препятствий, и на этапе 145 присваивают текущей ячейке уровень безопасности посадки в соответствии с удаленностью текущей ячейки от препятствий, а также в соответствии с показателем ровности поверхности и углом наклона предполагаемой области посадки, сформированной на основе текущей ячейки.
После этого на этапе 150 с помощью блока управления выбирают зону посадки на основе уровней безопасности посадки, присвоенных ячейкам в наборе ячеек.
В конечном счете на этапе 160 с помощью блока управления и/или полетного контроллера формируют управляющие воздействия на исполнительные механизмы БПЛА, чтобы БПЛА приближался к зоне посадки на основании полученных данных. По мере приближения, когда БПЛА выполнил некоторое очередное перемещение в направлении зоны посадки, БПЛА может вновь повторять этапы S110-S150, выполняя сканирование пространства, обновляя окружающую обстановку, уточняя зону посадку и перемещаясь ближе к ней. В конечном счете, выполнив необходимое число итераций, БПЛА совершает автономную посадку с повышенной точностью и безопасностью в выбранную зону посадки.
Следует отметить, что предполагаемой областью посадки может быть область, в которую может произвести посадку БПЛА, или область, в которую БПЛА может разместить груз. В частности, это актуально для случаев, когда непосредственная посадка в зону посадки сразу с грузом невозможна (например, груз подвешен на лебедке и не позволит БПЛА приземлиться) или когда освобождение от груза позволит БПЛА выиграть время, вернуться на базовую станцию и т.п. Соответственно, на этапе 160 БПЛА может выполнять посадку сам или разместить груз в выбранную зону посадки. Кроме того, БПЛА может сначала выбрать зону посадки для груза, разместить в ней груз, затем (или одновременно с выбором зоны посадки для груза) выбрать зону посадки для себя и выполнить самостоятельную посадку. В таком случае БПЛА сбережет и груз, и себя, и при этом обеспечит безопасность для окружающих объектов, людей и животных.
Далее предложенный способ будет раскрыт более подробно.
Преобразование облака точек в набор ячеек на этапе 120 может выполняться различными методами. При этом, например, используя метод шагающих кубиков или метод двойного контура, можно частично или полностью восстанавливать дефекты поверхности, имеющиеся в облаке точек, что повышает качество преобразования и точность распознавания поверхности. Использование же метода консенсуса случайной выборки за счет его устойчивости к зашумленности исходных данных позволяет применять предложенный способ даже в условиях сильно зашумленного облака точек, при малой плотности точек, при ускоренном сканировании, при наличии лишь недорогого низкопроизводительного лидара, при вибрациях, при наличии мер внешнего электронного противодействия, при неблагоприятных условиях окружающей среды и т.д. Для ускорения преобразования может быть установлен минимально допустимый размер ячейки, чтобы не происходила чрезмерная детализация поверхности. Минимально допустимый размер ячейки может соответствовать минимальному размеру объекта, который может рассматриваться как препятствие.
Поиск препятствий среди набора ячеек на этапе 130 может выполняться следующим образом. Определяют координаты и угол наклона каждой ячейки относительно осей X и Y, и если угол наклона и высота проекции ячейки на вертикальную плоскость одновременно превышают допустимые пределы угла наклона и высоты, определяют ячейку как препятствие. Например, ячейка представляет собой широкую высокую плоскую стену здания или узкую вытянутую вверх часть фонарного столба. Определив, что данная ячейка имеет вертикальный наклон и большую высоту, блок управления отнесет такую ячейку к препятствию. В другом варианте ячейка может иметь вертикальный или близкий к вертикальному наклон, однако может иметь столь малую высоту, что посадка на такую ячейку хоть и не является предпочтительной, но может быть выполнена, если окружающая ее поверхность достаточно горизонтальна и имеет достаточный для посадки размер – соответственно, сама по себе данная ячейка не будет отнесена к препятствиям. Также возможны иные комбинации размера и наклона ячейки, при которых возможна или невозможна посадка. Границу между такими комбинациями предлагается предварительно задавать с помощью пороговых значений угла наклона и высоты ячейки или с помощью подходящей функции. Таким образом, обеспечивается упрощенный, но достаточно точный способ поиска препятствий.
Формирование предполагаемой области посадки на основе текущей ячейки на этапе 141 может выполняться следующим образом. Сначала определяют размеры и форму ячейки, и если размеры и форма ячейки позволяют вписать в нее область, необходимую для посадки, определяют текущую ячейку как предполагаемую область посадки. Например, если для посадки требуется круглая площадка диаметром 80 см, пытаются вписать в ячейку круг диаметром 80 см, и если это удается сделать, определяют текущую ячейку как предполагаемую область посадки.
Если размеры и форма ячейки не позволяют вписать в нее область, необходимую для посадки, выполняют попытку получения укрупненной ячейки путем объединения текущей ячейки со всеми ячейками, с которыми она имеет общую границу, кроме ячеек, определенных как препятствие. Например, ячейка представляет собой треугольник со сторонами 5х3х10 см. Очевидно, непосредственно в такую ячейку БПЛА приземлиться не сможет. Выполняют объединение данной ячейки с соседними и получают новую, укрупненную ячейку в виде четырехугольника со сторонами 80х80 см. В такую укрупненную ячейку уже можно вписать требуемый круг диаметром 80 см, и ее определяют как предполагаемую область посадки.
Укрупнение выполняют до тех пор, пока не будет достигнут предел возможности укрупнения или пока не будет получена укрупненная ячейка, удовлетворяющая следующим условиям: размеры и форма укрупненной ячейки позволяют вписать в нее область, необходимую для посадки, используя при этом по меньшей мере часть текущей ячейки. Например, текущая ячейка представляет собой узкую горизонтальную поверхность одной лесенки или лист на дереве. На них невозможно выполнить посадку, поэтому требуется укрупнение. Сама по себе такая ячейка не определена была ранее как препятствие в силу своего угла наклона и/или размера, но попытка присоединения к ней других ячеек завершается неудачей, поскольку вокруг нее нет подходящих ячеек, с которыми ее можно было бы объединить (в случае лесенки), или вообще нет никаких ячеек (в случае листа, который определен как ячейка, «висящая в воздухе»), что автоматически делает данную ячейку тоже препятствием. В другом примере ячейка представляет собой небольшой треугольник на тротуаре в углу между стеной здания и лестницей или между двумя деревьями. У этой ячейки есть соседние горизонтальные ячейки, и по мере присоединения этих ячеек формируется новая укрупненная ячейка, в которую можно вписать требуемый круг диаметром 80 см, но этот круг не затрагивает ту самую угловую треугольную ячейку, послужившую началом для этой укрупненной ячейки. Соответственно, с участием той угловой треугольной ячейки выполнить посадку невозможно, и она также помечается как препятствие, чтобы при проверке других ячеек не выполнять ее бессмысленное присоединение. Таким образом, обеспечивается повышенная точность формирования предполагаемой области посадки, что позволяет повысить точность выбора зоны безопасной посадки.
Ровность поверхности предполагаемой области посадки на этапе 142 может быть определена разными методами, известными специалисту – например, методом среднеквадратической высоты неровностей (RMSH), путем вычисления коэффициента шероховатости и т.д.
Угол наклона предполагаемой области посадки на этапе 143 может быть определен по границам той требуемой области посадки, которая была вписана в данную предполагаемую область посадки. Это связано с тем, что в каждом конкретном случае текущая одна ячейка, формирующая предполагаемую область посадки, или же укрупненная ячейка, формирующая предполагаемую область посадки, может иметь произвольную форму с произвольными границами, а также иметь существенные выбросы в том или ином направлении, и учитывать каждую такую форму и размер нецелесообразно, потому что непосредственное значение имеет лишь та область, в которую будет выполняться посадка. Таким образом, обеспечивается повышенная точность выбора зоны безопасной посадки.
Вычисление удаленности текущей ячейки от препятствий на этапе 144 выполняется, например, от центра ячейки (чтобы увеличить скорость вычислений) или как наименьшее расстояние от каждой границы и/или вершины ячейки (чтобы увеличить точность вычислений).
Присвоение текущей ячейке уровня безопасности посадки на этапе 145 выполняется в соответствии с удаленностью текущей ячейки от препятствий, а также в соответствии с показателем ровности поверхности и углом наклона предполагаемой области посадки, сформированной на основе текущей ячейки. Кроме того, может учитываться, является ли данная ячейка препятствием. Как показано в примере разметки ячеек на Фиг. 2, красным цветом (уровень безопасности посадки, соответствующий опасности) помечены стены, деревья, кусты и т.д. Желтым цветом (средний уровень безопасности посадки) помечены зоны около препятствий, неровные участки земли и т.д. Зеленым цветом (уровень безопасности посадки, соответствующий наиболее безопасной посадке) помечены ровные горизонтальные зоны, пригодные для приземления. Таким образом, обеспечивается повышенная точность выбора зоны безопасной посадки. Если нет никаких дополнительных факторов, влияющих на принятие решения, для посадки выбирается ближайшая к БПЛА зона, состоящая из зеленых ячеек.
Во избежание приземления на крыши зданий и иные расположенные существенно выше земли поверхности способ может дополнительно содержать определение высоты расположения предполагаемой области посадки, и выбор зоны посадки может учитывать высоту расположения предполагаемой области посадки. Таким образом, при дальнейшем поиске автономно приземлившегося БПЛА не будет необходимости исследовать крыши зданий.
В одном из вариантов осуществления, когда определено, что возникла экстренная ситуация, блок управления БПЛА может определять ранг экстренной ситуации на основе типа возникшей экстренной ситуации. Например, если типом экстренной ситуации является потеря сигнала оператора или ошибка навигации, и нет других факторов, то ранг экстренной ситуации может быть определен как «нет угрозы». Если типом экстренной ситуации является низкий заряд батареи, то ранг экстренной ситуации может быть определен как «средний уровень угрозы». Если типом экстренной ситуации является наличие повреждения самого БПЛА, то ранг экстренной ситуации может быть определен как «высокий уровень угрозы». Следует понимать, что данные примеры являются лишь иллюстративными и не ограничивают настоящее изобретение. В других конкретных реализациях могут быть иные типы и ранги экстренной ситуации.
В зависимости от ранга экстренной ситуации может оцениваться время, доступное для посадки, и это время может учитываться при выборе зоны посадки. Например, если ранг экстренной ситуации указывает, что нет угрозы, время, доступное для посадки, может оцениваться как неограниченное, и для посадки может быть выбрана относительно удаленная от БПЛА зеленая зона на поверхности земли, до которой требуется лететь относительно долгое время. Если же ранг экстренной ситуации, наоборот, указывает на высокий уровень угрозы, может быть выбрана ближайшая зона, так или иначе пригодная для посадки, даже если это желтая зона на крыше здания. Данные подходы позволяют адаптировать способ под разные экстренные ситуации и как можно больше повысить вероятность сбережения (или снизить вероятность утраты) груза и самого БПЛА.
Еще в одном дополнительном варианте осуществления блок управления БПЛА может определять, требуется ли экстренный сброс груза, на основе предварительно заданных условий экстренного сброса груза и ранга экстренной ситуации, и БПЛА может выполнять экстренный сброс груза, если это требуется. Данный подход позволяет адаптировать способ под разные экстренные ситуации и как можно больше повысить вероятность сбережения (или снизить вероятность утраты) груза и самого БПЛА. Например, если ценность груза выше ценности БПЛА, основные усилия могут быть направлены на максимально безопасную посадку груза. Если же ценность груза не столь велика, и есть необходимость сохранить хотя бы сам БПЛА, груз может быть экстренно сброшен без сближения с землей (например, может быть автоматически перерезан трос, удерживающий груз) и независимо от уровня безопасности ячейки, над которой в данный момент находится БПЛА. Также возможны и иные промежуточные сценарии, в которых решение о сбросе может приниматься в зависимости от комбинации условий: ранга экстренной ситуации и предварительно заданных условий экстренного сброса груза. В одном из вариантов осуществления при аварийном сбросе может все же учитываться уровень безопасности ячейки, чтобы груз не упал с высоты на человека, на корову, на трактор и т.д.
Пример
На типовой рыночный БПЛА DJI установлен недорогой низкопроизводительный лидар. В результате потери сигнала от оператора в сложных условиях окружающей среды (туман) блок управления БПЛА, интегрированный в полетный контроллер, принимает решение об экстренной посадке. С помощью лидара получают зашумленное трехмерное облако точек, характеризующее пространство под БПЛА. Преобразуют облако точек в набор плоских ячеек методом консенсуса случайных выборок, при этом многие точки определяют как шум от отбрасывают. Выполняют поиск препятствий среди набора ячеек, как указано выше – в частности, сразу определяют в качестве препятствий ячейки на стенах, стволы деревьев и кусты. Далее для каждой ячейки, которая не определена как препятствие, формируют предполагаемую область посадки, определяют ровность поверхности предполагаемой области посадки, определяют угол наклона предполагаемой области посадки, определяют удаленность текущей ячейки от препятствий, присваивают текущей ячейке уровень безопасности посадки в соответствии с удаленностью текущей ячейки от препятствий, а также в соответствии с показателем ровности поверхности и углом наклона предполагаемой области посадки, сформированной на основе текущей ячейки. В частности, как показано на Фиг. 2, помечают ячейки красным, желтым и зеленым цветом в зависимости от доступности и безопасности посадки. После этого выбирают ближайшую зону посадки среди зеленых ячеек и выполняют безопасную посадку, сохранив БПЛА.
Применение
Устройства и способы согласно настоящему изобретению можно использовать для автономной посадки БПЛА, выполняющих, в частности, доставку грузов, различные исследования, анализ окружающего пространства, контроль объектов, фото- и видеосъемку, спасательные операции, автономный мониторинг для задач охраны сельхозугодий, картографии, дистанционного химико-физического анализа, контроля всхожести и спелости урожая, химической обработки и т.д. Также при необходимости возможно применение настоящего изобретения в пилотируемых летательных аппаратах.
Дополнительные особенности реализации
Различные иллюстративные блоки и модули, описанные в связи с раскрытием сущности в данном документе, могут реализовываться или выполняться с помощью процессора общего назначения, процессора цифровых сигналов (DSP), специализированной интегральной схемы (ASIC), программируемой пользователем вентильной матрицы (FPGA) или другого программируемого логического устройства (PLD), дискретного логического элемента или транзисторной логики, дискретных аппаратных компонентов либо любой комбинации вышеозначенного, предназначенной для того, чтобы выполнять описанные в данном документе функции. Процессор общего назначения может представлять собой микропроцессор, но в альтернативном варианте, процессор может представлять собой любой традиционный процессор, контроллер, микроконтроллер или конечный автомат. Процессор также может реализовываться как комбинация вычислительных устройств (к примеру, комбинация DSP и микропроцессора, несколько микропроцессоров, один или более микропроцессоров вместе с DSP-ядром либо любая другая подобная конфигурация).
Некоторые блоки или модули по отдельности или вместе могут представлять собой, например, процессор, который сконфигурирован для вызова и выполнения компьютерных программ из памяти для выполнения этапов способа или функций блоков или модулей в соответствии с вариантами осуществления настоящего изобретения. Согласно вариантам осуществления, устройство может дополнительно включать в себя память. Процессор может вызывать и выполнять компьютерные программы из памяти для выполнения способа. Память может быть отдельным устройством, независимым от процессора, или может быть интегрирована в процессор. Память может хранить код, инструкции, команды и/или данные для исполнения на наборе из одного или более процессоров описанного устройства. Коды, инструкции, команды могут предписывать процессору выполнять этапы способа или функции устройства.
Функции, описанные в данном документе, могут реализовываться в аппаратном обеспечении, программном обеспечении, выполняемом посредством одного или более процессоров, микропрограммном обеспечении или в любой комбинации вышеозначенного, если это применимо. Аппаратные и программные средства, реализующие функции, также могут физически находиться в различных позициях, в том числе согласно такому распределению, что части функций реализуются в различных физических местоположениях, то есть может выполняться распределенная обработка или распределенные вычисления.
Вышеупомянутая память может быть энергозависимой или энергонезависимой памятью или может включать в себя как энергозависимую, так и энергонезависимую память. Специалисту в области техники должно быть также понятно, что, когда речь идет о памяти и о хранении данных, программ, кодов, инструкций, команд и т.п., подразумевается наличие машиночитаемого (или компьютерно-читаемого, процессорно-читаемого) запоминающего носителя. Машиночитаемый запоминающий носитель может представлять собой любой доступный носитель, который может использоваться для того, чтобы переносить или сохранять требуемое средство программного кода в форме инструкций или структур данных, и к которому можно осуществлять доступ посредством компьютера, процессора или иного устройства обработки общего назначения или специального назначения.
Следует понимать, что хотя в настоящем документе для описания различных элементов, компонентов, областей, слоев и/или секций могут использоваться такие термины, как "первый", "второй", "третий" и т.п., эти элементы, компоненты, области, слои и/или секции не должны ограничиваться этими терминами. Эти термины используются только для того, чтобы отличить один элемент, компонент, область, слой или секцию от другого элемента, компонента, области, слоя или секции. Так, первый элемент, компонент, область, слой или секция может быть назван вторым элементом, компонентом, областью, слоем или секцией без выхода за рамки объема настоящего изобретения. В настоящем описании термин "и/или" включает любые и все комбинации из одной или более из соответствующих перечисленных позиций. Элементы, упомянутые в единственном числе, не исключают множественности элементов, если отдельно не указано иное.
Функциональность элемента, указанного в описании или формуле изобретения как единый элемент, может быть реализована на практике посредством нескольких компонентов устройства, и наоборот, функциональность элементов, указанных в описании или формуле изобретения как несколько отдельных элементов, может быть реализована на практике посредством единого компонента.
Несмотря на то, что примерные варианты осуществления были подробно описаны и показаны на сопроводительных чертежах, следует понимать, что такие варианты осуществления являются лишь иллюстративными и не предназначены ограничивать настоящее изобретение, и что данное изобретение не должно ограничиваться конкретными показанными и описанными компоновками и конструкциями, поскольку специалисту в данной области техники на основе информации, изложенной в описании, и знаний уровня техники могут быть очевидны различные другие модификации и варианты осуществления изобретения, не выходящие за пределы сущности и объема данного изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО И СПОСОБ ДЛЯ ОПТИМИЗАЦИИ ТРАЕКТОРИИ ДВИЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2022 |
|
RU2793982C1 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ УТОЧНЕНИЯ ТРАЕКТОРИИ ДВИЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2022 |
|
RU2794003C1 |
| СПОСОБ МОНИТОРИНГА ВОЗДУШНОГО ПРОСТРАНСТВА В ЗОНАХ РАСПРОСТРАНЕНИЯ ОБЛАКОВ ВУЛКАНИЧЕСКОГО ПЕПЛА | 2015 |
|
RU2650850C2 |
| Беспилотный летательный аппарат и способ посадки такого аппарата | 2022 |
|
RU2808061C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА С ЗЕМЛЕЙ | 1993 |
|
RU2124760C1 |
| СПОСОБЫ ПРЕЦИЗИОННОЙ ИДЕНТИФИКАЦИИ ГРАНИЧНЫХ И УГЛОВЫХ ТОЧЕК НА ПЛОСКОМ ИЗОБРАЖЕНИИ И В ОБЛАКЕ ТОЧЕК | 2024 |
|
RU2839589C1 |
| АВТОМАТИЧЕСКИЙ КОМПЛЕКС ДИСТАНЦИОННОЙ ДИАГНОСТИКИ ЭЛЕКТРОСЕТЕВОГО ОБОРУДОВАНИЯ | 2017 |
|
RU2674550C1 |
| СПОСОБ ПОСАДКИ БПЛА НА МОБИЛЬНУЮ ПЛАТФОРМУ | 2024 |
|
RU2828305C1 |
| СПОСОБ И СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДРОНОМ | 2018 |
|
RU2714977C1 |
| Интеллектуальная система автоматического дистанционного мониторинга состояния и безопасности высоковольтных ЛЭП с применением беспилотных летательных аппаратов | 2024 |
|
RU2829914C1 |
Изобретение относится к способу выбора безопасной зоны посадки летательного аппарата (ЛА). Для выбора зоны безопасной посадки с помощью одного или более установленных на летательном аппарате (ЛА) трехмерных (3D) датчиков получают трехмерное облако точек, характеризующее пространство под ЛА, и преобразуют его в набор плоских ячеек, описывающих поверхности объектов и рельеф местности, при этом точки из облака точек, не принадлежащие ни одной поверхности, исключают из облака точек, выполняют поиск препятствий среди набора ячеек, для каждой ячейки, которая не определена как препятствие, формируют предполагаемую область посадки на основе текущей ячейки, определяют ровность поверхности предполагаемой области посадки, определяют угол наклона предполагаемой области посадки, определяют удаленность текущей ячейки от препятствий, присваивают текущей ячейке уровень безопасности посадки в соответствии с полученными ранее данными, и выбирают зону посадки на основе уровня безопасности посадки ячеек. Обеспечивается повышение безопасности посадки ЛА. 9 з.п. ф-лы, 2 ил.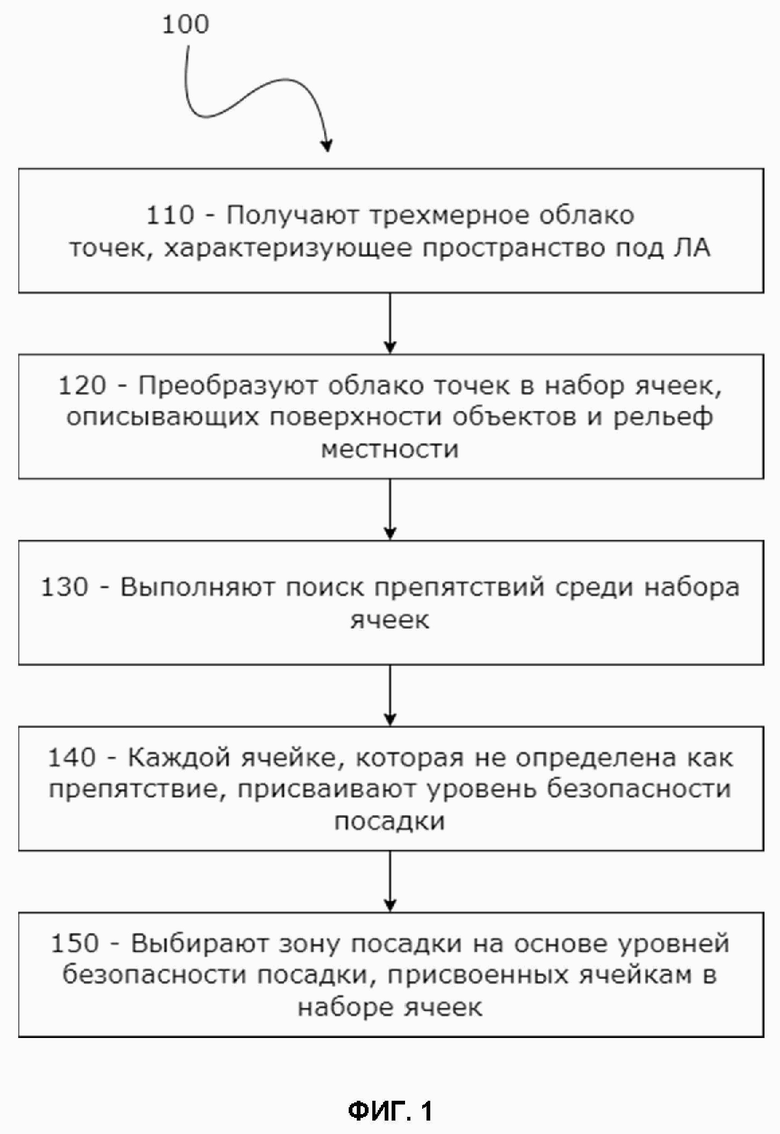
1. Способ выбора безопасной зоны посадки, содержащий этапы, на которых:
с помощью одного или более установленных на летательном аппарате (ЛА) трехмерных (3D) датчиков получают трехмерное облако точек, характеризующее пространство под ЛА;
преобразуют облако точек в набор плоских ячеек, описывающих поверхности объектов и рельеф местности, при этом точки из облака точек, не принадлежащие ни одной поверхности, исключают из облака точек;
выполняют поиск препятствий среди набора ячеек;
для каждой ячейки, которая не определена как препятствие, выполняют этапы, на которых:
- формируют предполагаемую область посадки на основе текущей ячейки,
- определяют ровность поверхности предполагаемой области посадки,
- определяют угол наклона предполагаемой области посадки,
- определяют удаленность текущей ячейки от препятствий,
- присваивают текущей ячейке уровень безопасности посадки в соответствии с удаленностью текущей ячейки от препятствий, а также в соответствии с показателем ровности поверхности и углом наклона предполагаемой области посадки, сформированной на основе текущей ячейки; и
выбирают зону посадки на основе уровня безопасности посадки ячеек.
2. Способ по п. 1, в котором предполагаемой областью посадки является область, в которую может произвести посадку ЛА, или область, в которую ЛА может разместить груз;
при этом способ дополнительно содержит этап, на котором выполняют посадку и/или размещение груза в выбранную зону посадки.
3. Способ по п. 1, в котором формирование предполагаемой области посадки на основе текущей ячейки содержит этапы, на которых:
определяют размеры и форму ячейки; и
если размеры и форма ячейки позволяют вписать в нее область, необходимую для посадки, определяют текущую ячейку как предполагаемую область посадки.
4. Способ по п. 3, в котором формирование предполагаемой области посадки на основе текущей ячейки дополнительно содержит этапы, на которых:
если размеры и форма ячейки не позволяют вписать в нее область, необходимую для посадки, выполняют попытку получения укрупненной ячейки путем объединения текущей ячейки со всеми ячейками, с которыми она имеет общую границу, кроме ячеек, определенных как препятствие, при этом выполняют укрупнение до тех пор, пока не будет достигнут предел возможности укрупнения или пока не будет получена укрупненная ячейка, удовлетворяющая следующим условиям: размеры и форма укрупненной ячейки позволяют вписать в нее область, необходимую для посадки, используя при этом по меньшей мере часть текущей ячейки;
если укрупнение завершилось успехом, определяют укрупненную ячейку как предполагаемую область посадки; и
если укрупнение завершилось неудачей, определяют текущую ячейку как препятствие.
5. Способ по п. 1, в котором выполнение поиска препятствий среди набора ячеек содержит этапы, на которых для каждой ячейки:
определяют координаты и угол наклона ячейки относительно осей X и Y; и
если угол наклона и высота проекции ячейки на вертикальную плоскость одновременно превышают допустимые пределы угла наклона и высоты, определяют ячейку как препятствие.
6. Способ по п. 1, в котором преобразование облака точек в набор ячеек выполняют методом шагающих кубиков или методом двойного контура, частично или полностью восстанавливая дефекты поверхности, имеющиеся в облаке точек, или методом консенсуса случайной выборки.
7. Способ по п. 1, дополнительно содержащий этап, на котором:
определяют высоту расположения предполагаемой области посадки;
при этом выбирают зону посадки дополнительно на основе высоты расположения предполагаемой области посадки.
8. Способ по п. 1, дополнительно содержащий этапы, на которых:
определяют, что возникла экстренная ситуация; и
определяют ранг экстренной ситуации на основе типа возникшей экстренной ситуации.
9. Способ по п. 8, дополнительно содержащий этап, на котором:
оценивают время, доступное для посадки, в зависимости от ранга экстренной ситуации;
при этом выбирают зону посадки дополнительно на основе времени, доступного для посадки.
10. Способ по п. 8, дополнительно содержащий этапы, на которых:
определяют, требуется ли экстренный сброс груза, на основе предварительно заданных условий экстренного сброса груза и ранга экстренной ситуации; и
выполняют экстренный сброс груза, если он требуется.
| ТРАНСПОРТНОЕ СРЕДСТВО ВЕРТИКАЛЬНОЙ ПОСАДКИ, СИСТЕМА И СПОСОБ ОБЕСПЕЧЕНИЯ ОСВЕДОМЛЕННОСТИ ОБ ОБСТАНОВКЕ | 2018 |
|
RU2753992C2 |
| RU 2015138534 A, 20.03.2017 | |||
| RU 198460 U1, 10.07.2020 | |||
| US 20210306614 A1, 30.09.2021 | |||
| US 10853931 B2, 01.12.2020 | |||
| US 10901437 B2, 26.01.2021. | |||

