Изобретение относится к области автоматического управления малоразмерными дронами (беспилотными летательными аппаратами- БПЛА) с вертикальным взлетом и посадкой, преимущественно, типа мультикоптер (например, квадрокоптер, гексакоптер, октакоптер) или типа конвертоплан (летательный аппарат с поворотными винтами, которые на взлете и при посадке работают как подъемные, а в горизонтальном полете - как тянущие).
Полет любого дрона состоит из трех этапов: взлет, крейсерский полет, посадка. Крейсерский полет дрона выполняется под управлением полетного контроллера, фактически выполняющего роль автопилота. Типичным примером полетного контроллера дрона может служить ArduPilot Mega (АРМ) 2.6 [1]. Количество функций полетного контроллера зависит от наличия на борту дрона соответствующей периферии и дополнительных устройств. К функциям полетного контроллера относятся:
- стабилизация дрона в воздухе;
- удержание высоты (при помощи барометра) и позиции (при помощи GPS);
- автоматический полет по заданным заранее точкам (опционально);
- передача на землю текущих параметров полета с помощью модема или Bluetooth (опционально);
- обеспечение безопасности полета (возврат в точку взлета при потере сигнала, автопосадка);
- подключение дополнительной периферии: OSD, светодиодной индикации и пр.
Навигационное обеспечение полетного контроллера часто осуществляется с помощью спутниковых систем позиционирования GPS/ГЛОНАСС. Типичная точность современных GPS/ГЛОНАСС-приемников в горизонтальной плоскости при хорошей видимости спутников (чистое поле) и использовании алгоритмов коррекции составляет от 1 до 30 метров, в среднем примерно 6-8 метров [2]. Для осуществления крейсерского полета дрона и его аварийной автопосадки такой точности обычно достаточно. Однако для доставки грузов с помощью дронов в городских условиях с взлетом/посадкой на небольшие приоконные посадочные площадки и с пространственными ограничениями на траектории взлета и посадки указанной точности позиционирования совершенно недостаточно. Поэтому для автоматического взлета/посадки дронов в указанном их применении используются специальные способы и системы с навигацией по какими-либо ориентирам на посадочных площадках.
Известен «Способ автоматической доставки грузов беспилотным летательным аппаратом (БПЛА) и система для его осуществления» (патент US 9534905, International Business Machines Corporation, МПК: B64D 1/22, G08G 5/04, B64C 39/02, G01S 1/68, опубл. 25.01.2016, 3.01.2017). Способ включает в себя размещение в месте доставки груза по меньшей мере одной метки радиочастотной идентификации (транспондера), координаты которой заранее известны, размещение груза на БПЛА, введение координат места доставки груза в блок управления БПЛА, перелет БПЛА к месту доставки груза с грубой спутниковой навигацией (с использованием, например систем GPS/ГЛОНАСС), прием опознавательных сигналов от других БПЛА и/или радиомаяков на потенциально опасных объектах и осуществление корректирующих воздействий на местоположение БПЛА во избежание столкновения, радиозахват по меньшей мере одной радиочастотной метки, точное наведение БПЛА к месту посадки с навигацией по меткам радиочастотной идентификации, посадку и автоматическое отделение груза в месте доставки груза, возврат БПЛА в место его отправки или в другое заранее заданное место. Реализация автоматического взлета-посадки БПЛА на малые приоконные площадки городских многоквартирных домов с использованием рассмотренного способа затруднительна по следующим причинам:
1. На расстояниях навигации по меткам радиочастотной идентификации от 0 до 20 метров, основываясь на измерении временной разницы достижения эхо сигналами идентификационной метки различных антенн БПЛА, нельзя обеспечить необходимую для посадки точность определения текущего положения БПЛА относительно посадочной площадки в силу соизмеримости времени распространения эхо сигналов идентификационной метки (0-67 нсек) с минимальным временем переключения современных электронных элементов.
2. При навигации по меткам радиочастотной идентификации, основываясь на измерении ослабления эхо сигналов идентификационной метки, при приближении к идентификационной метке растет коэффициент усиления и система становится неустойчивой. Ограничение эхо сигналов идентификационной метки снижает точность посадки.
3. При посадке с навигацией по меткам радиочастотной идентификации траектории посадки БПЛА способ совершенно не учитывает неизбежные пространственные ограничения в городских условиях, которые возникают из-за разнообразной ориентации домов-носителей посадочных площадок и прилегающих построек, их архитектурных выступов, а также наличия придомовых деревьев, электрических столбов, рекламных щитов и проводов, что серьезно препятствует безопасному использованию дронов в городских условиях.
4. Способ совершенно не описывает и следовательно, игнорирует указанные выше пространственные ограничения на траектории взлета дрона.
5. После посадки в способе не предусмотрена фиксация положения дрона и, учитывая относительно небольшой вес малоразмерного дрона, он легко может быть сброшен порывом ветра с небольшой посадочной площадки.
6. Выступающие горизонтальные приоконные посадочные площадки нарушают внешний вид строений и могут затенять дневной свет в помещениях, что также может служить препятствием для внедрения рассматриваемого способа.
Известен «Способ посадки летательного аппарата» (патент РФ №2208555, МПК: G08G 5/02, B64F 1/18, В64С 13/20, опубл. 20.07.2003), который состоит в том, что предварительно на беспилотный летательный аппарат устанавливают импульсный источник излучения, на пункте посадки устанавливают платформу, на которую устанавливают вертикальную раму с возможностью поворота вокруг вертикальной оси, и привод этого поворота, на эту раму устанавливают два приемника импульсного излучения от этого источника излучения, которые настраивают на частоту излучения этого источника излучения, вертикальную посадочную сеть с возможностью ее горизонтального перемещения по направляющим, которые закрепляют на этой раме, вычислитель и тормозное устройство, которое тросами соединяют с этой сетью, с помощью привода поворота эту раму предварительно поворачивают в соответствии с направлением ветра, на конечном участке захода этого аппарата на посадку его вводят в зону действия этих приемников, с помощью которых измеряют угол возвышения и боковое смещение этого аппарата относительно центра этой оси, вычисляют величины отклонений этого аппарата от программной траектории полета, которые автоматически передают на этот аппарат и корректируют траекторию полета этого аппарата, для обеспечения его входа в эту сеть, при входе этого аппарата в эту сеть ее перемещают по направляющим этой рамы, гасят кинетическую энергию движения этого аппарата за счет вытягивания тросов тормозного устройства и вынимают этот аппарат из этой сети, на пункте посадки предварительно платформу устанавливают с возможностью поступательного перемещения по направлению горизонтальной оси, перпендикулярной плоскости этой сети, устанавливают привод этого перемещения платформы, на этой раме устанавливают датчик линейного ускорения, ось чувствительности которого выставляют по этому направлению, дальномер и датчик начала вытягивания тросов тормозного устройства, предварительно в вычислитель вводят значение Дmп максимальной дальности действия этих приемников в простых метеорологических условиях, на конечном участке захода этого аппарата на посадку измеряют текущую дальность Д(t) от этого аппарата до пункта посадки и вводят ее в вычислитель, вычисляют текущее значение V(t) скорости сближения этого аппарата с пунктом посадки, запоминают в вычислителе значения Д(Тв) этой дальности и V(Tв) этой скорости в момент времени Тв входа этого аппарата в зону действия этих приемников, с использованием Д(Тв), V(Tв) и Дmп вычисляют потребное значение Jтр ускорения поступательного перемещения платформы по этому направлению и если Jтр не равно нулю, то включают привод поступательного перемещения платформы, с помощью которого поступательно перемещают ее в этом направлении, с помощью датчика линейного ускорения измеряют текущее значение J(t) ускорения этого перемещения, подают J(t) в вычислитель, вычисляют разность Jтр и J(t), пропорционально которой управляют этим приводом, уменьшая эту разность к нулю, и в момент входа аппарата в эту сеть выключают этот привод по сигналу от датчика начала вытягивания тросов тормозного устройства.
Для автоматического взлета-посадки БПЛА на малые приоконные площадки городских многоквартирных домов данный способ непригоден по следующим причинам:
1. Способ предназначен для использования в отношении БПЛА, которые не обладают техническими возможностями самостоятельной посадки, например, вследствие отсутствия шасси и неспособности совершать вертикальную посадку. Громоздкое посадочное оборудование, согласно рассматриваемому способу, размещается на земле и не годится для массового размещения на приоконных посадочных площадках.
2. Способ вообще не решает задачи автоматического взлета БПЛА, а тем более в условиях пространственных ограничений на траекторию взлета.
3. Поскольку при посадке БПЛА имеет высокую скорость, то велика вероятность его повреждения в момент его первичного контакта с сетью, последующего торможения и падения. В случае аварийной посадки БПЛА велика вероятность нанесения ущерба дому-носителю посадочной площадки и людям.
4. Посадочное оборудование, соответствующее данному способу, является сложным и дорогим как в установке, так и в эксплуатации, и его использование коммерчески неоправданно применительно к автоматической доставке с помощью БПЛА относительно небольших и недорогих грузов.
5. Подготовка БПЛА к взлету после посадки выполняется ручным образом. Известен «Способ автоматической посадки беспилотного летательного аппарата для мониторинга протяженных объектов» (патент РФ №2503936, МПК: G01M 3/00, В64С 19/00, опубл. 10.01.2014), включающий измерение высоты полета Н, горизонтальной дальности до расчетной точки касания D, отклонения от вертикальной плоскости, проходящей через ось взлетно-посадочной полосы (ВПП) ΔZ, определение трех составляющих скорости Vx, Vy, Vz и ускорения ах, ау, az, задание трех составляющих скорости Vхк, Vyк, Vzк и ускорения ахк, аук, azк в расчетной точке касания, формирование опорной траектории снижения H0(D,D0) и Z0(D,D0) из точки начала снижения, находящейся на расстоянии D0 от расчетной точки касания, определение отклонения беспилотного летательного аппарата от опорной траектории снижения Δh=H-H0(D,D0) и ΔZ=Z-Z0(D,D0), формирование управляющих сигналов по результатам измерений и подачу их на исполнительные механизмы рулей беспилотного летательного аппарата, причем в каждой точке траектории задают контрольный створ траекторий снижения беспилотного летательного аппарата в виде круга, лежащего на плоскости, перпендикулярной линии опорной траектории, и с центром, лежащим на линии опорной траектории снижения, причем область контрольного створа определяют из уравнения  и монотонно уменьшают пропорционально уменьшению расстояния до расчетной точки касания
и монотонно уменьшают пропорционально уменьшению расстояния до расчетной точки касания  , где ϕ - минимально допустимая область створа, обеспечивающая безопасную посадку, а при выходе беспилотного летательного аппарата за область контрольного створа формируют новую опорную траекторию снижения при условии H0(D0)>Hmin, где Hmin - минимально допустимая высота безопасного полета, причем при невыполнении данного условия снижение прекращают и осуществляют уход на второй круг с набором высоты, причем формирование управляющих сигналов uh и uz осуществляют по следующим зависимостям: для управления в вертикальной плоскости
, где ϕ - минимально допустимая область створа, обеспечивающая безопасную посадку, а при выходе беспилотного летательного аппарата за область контрольного створа формируют новую опорную траекторию снижения при условии H0(D0)>Hmin, где Hmin - минимально допустимая высота безопасного полета, причем при невыполнении данного условия снижение прекращают и осуществляют уход на второй круг с набором высоты, причем формирование управляющих сигналов uh и uz осуществляют по следующим зависимостям: для управления в вертикальной плоскости  и для управления в горизонтальной плоскости
и для управления в горизонтальной плоскости  , где k1, k2, k3, k4 - коэффициенты усиления составляющих управляющего воздействия, причем при достижении высоты начала выдерживания границ области створов Нп формируют новую опорную траекторию, причем на этой высоте в зависимости от параметров окружающей среды и действующих ветровых возмущений формируют экспоненциальную траекторию снижения с монотонно возрастающим углом тангажа.
, где k1, k2, k3, k4 - коэффициенты усиления составляющих управляющего воздействия, причем при достижении высоты начала выдерживания границ области створов Нп формируют новую опорную траекторию, причем на этой высоте в зависимости от параметров окружающей среды и действующих ветровых возмущений формируют экспоненциальную траекторию снижения с монотонно возрастающим углом тангажа.
Данный способ затруднительно использовать для автоматического взлета-посадки БПЛА при автоматической доставке грузов в городских условиях по следующим причинам:
1. Способ предназначен для автоматической посадки БПЛА самолетного типа на традиционные взлетно/посадочные полосы с последующим пробегом по ВПП, что недопустимо при посадке БПЛА на приоконные посадочные площадки.
2. При формировании траектории посадки БПЛА данный способ не учитывает наличие возможных пространственных ограничений, например, в виде деревьев, проводов, балконов, других архитектурных выступов домов и т.п.
3. Способ не обеспечивает целенаправленное управление траекторией взлета БПЛА в условиях весьма возможных пространственных ограничений.
4. Реализация способа требует использования полноценного бортового компьютера, что ставит под сомнение экономическую целесообразность использования данного способа в случае автоматической доставки с помощью БПЛА относительно недорогих грузов.
5. При описании данного способа не указываются источники первичных данных по текущей высоте полета БПЛА и его текущей дальности до расчетной точки приземления, погрешность измерения указанных данных и поэтому не представляется возможным оценить практическую значимость способа.
6. После посадки в способе не предусмотрена фиксация положения дрона и, учитывая относительно небольшой вес малоразмерного дрона, он легко может быть сброшен порывом ветра с небольшой посадочной площадки.
Известен «Способ точной посадки беспилотного летательного аппарата» (патент РФ №2615587, МПК: В5439/00, опубл. 05.04.2017), который используется в качестве прототипа предлагаемого способа и который включает в себя следующие этапы:
- получают временную последовательность кадров, закодированную в битовый поток, получаемую с оптической камеры, установленной на БПЛА, и содержащую данные, по меньшей мере, об одной оптической метке, расположенной в точке посадки БПЛА;
- определяют, по меньшей мере, два угла смещения при помощи алгоритмов компьютерного зрения;
- получают данные, по меньшей мере, о двух углах наклона БПЛА и высоте БПЛА;
- обрабатывают полученные данные, по меньшей мере, о двух углах наклона БПЛА и высоте БПЛА при помощи, по меньшей мере, одного рекурсивного фильтра;
- определяют вектор смещения БПЛА;
- формируют и направляют сигналы управления при помощи пропорционально-интегрально-дифференцирующего (ПИД) регулятора на полетный контроллер БПЛА;
- корректируют траекторию посадки БПЛА.
Описанный способ-прототип также затруднительно использовать для автоматического взлета-посадки БПЛА при автоматической доставке грузов в городских условиях по следующим причинам:
1. Способ не учитывает вполне возможные пространственные ограничения в городских условиях на траекторию его посадки и вообще не решает задачу управления траекторией автоматического взлета БПЛА в условиях таких же пространственных ограничений.
2. В момент перехода от глобальной спутниковой навигации к локальной навигации по оптическим меткам БПЛА может находиться относительно посадочной площадки на стене многоквартирного дома и слева, и справа, и сверху, и снизу, и спереди, и сзади. В то же время рассматриваемый способ принципиально расчитан только на случай, когда оптическая метка, а следовательно и посадочная площадка, находится снизу относительно БПЛА.
3. Условием использования рассматриваемого способа является наличие прямой видимости нужной метки с борта дрона, а в момент перехода от глобальной спутниковой навигации к локальной навигации по оптическим меткам нужная метка может быть перекрыта каким-либо препятствием, например кроной дерева, рекламными щитами или электрическими проводами.
4. При реализации способа в силу его математической сложности, не представляется возможным ограничиться использованием на борту БПЛА одного простого полетного контроллера, а необходимо дополнительно использовать вполне развитый, с высоким быстродействием и потому дорогой бортовой компьютер, что делает коммерчески невыгодным использование БПЛА для доставки массовых небольших и недорогих грузов, например, заказных обедов, лекарств, почты и т.п.
5. В рассматриваемом способе отсутствует описание алгоритмов распознавания оптических меток. Ссылки на возможность использования тех или иных математических библиотек, или перечней каких-либо математических операций для распознавания оптических меток еще не определяют алгоритмы, по которым должен работать бортовой компьютер. Поэтому техническая реализация рассматриваемого способа представляется проблематичной.
6. После посадки в способе не предусмотрена фиксация положения дрона и, учитывая относительно небольшой вес малоразмерного дрона, он легко может быть сброшен порывом ветра с небольшой посадочной площадки.
7. Выступающие горизонтальные приоконные посадочные площадки нарушают внешний вид строений и могут затенять дневной свет в помещениях, что также может служить препятствием для внедрения рассматриваемого способа.
Известна система, описанная в упомянутом патенте «Способ автоматической доставки грузов беспилотным летательным аппаратом (БПЛА) и система для его осуществления» (патент US 9534905, International Business Machines Corporation, МПК: B64D 1/22, G08G 5/04, B64C 39/02, G01S 1/68, опубл. 25.01.2016, 3.01.2017). Система включает в себя, по меньшей мере, одну активную или пассивную метку радиочастотной идентификации, установленную на месте доставки груза, координаты которой заранее известны, БПЛА с блоком управления, содержащим модуль введения координат места доставки груза, и средство фиксации-расфиксации доставляемого груза, систему навигации по меткам радиочастотной идентификации на борту БПЛА, обеспечивающую его посадку, соединенную с блоком управления. Причем система навигации по меткам радиочастотной идентификации включает в себя, по меньшей мере, три пространственно разнесенных антенны, закрепленные на элементах фюзеляжа БПЛА, как минимум одна из которых приемопередающая, многократно взаимодействующая с метками радиочастотной идентификации, модуль идентификации меток радиочастотной идентификации места доставки груза, соединенный с системой навигации, модуль коррекции местоположения БПЛА в направлении места доставки груза при захвате и идентификации меток радиочастотной идентификации, которые не принадлежат месту доставки груза, модуль предотвращения столкновений с другими летательными аппаратами и/или опасными объектами, оборудованными радиомаяками, вырабатывающий соответствующие корректирующие воздействия на местоположение БПЛА.
Недостатки данной системы повторяют недостатки реализуемого ею способа, и перечислены выше при описании этого способа.
Известна «Система автоматической посадки летательных аппаратов» (патент РФ №2284058, МПК: G08G 05/02, B64D 45/04, опубл. 20.09.2006). Система содержит в бортовой части летательного аппарата (ЛА) бортовую аппаратуру потребителей, состоящую из спутниковой навигационной системы (СНС), скомплексированной с инерциальной навигационной системой (ИС), блок формирования траекторных параметров, предназначенный для фильтрации и интегрирования составляющих вектора ЛА, поступающих на него с бортовой аппаратуры потребителей, вычислитель системы автоматического управления (САУ), выходы которого связаны с сервоприводом поверхностей управления по тангажу и курсу, механически связанных с соответствующими рулевыми приводами, датчики углового положения ЛА, связанные с вычислителем САУ, подключенный к приемнику СНС индикатор летчика, радиовысотомер, компаратор, курсоглиссадный радиоприемник (КРП), связанные с ним через радиоканалы глиссадный и курсовой радиомаяки (ГРМ, КРМ), установленные по штатному расположению относительно взлетно-посадочной полосы (ВПП), блок фильтрации линейных траекторных параметров СНС и угловых отклонений от равносигнальных зон радиотехнических средств (РТС), выполненный на сумматорах и интеграторах, два блока умножения, две схемы НЕ, последовательно соединенные с компаратором, два входа которого соединены с задатчиком высоты 60-70 м и радиовысотомером, при этом первый и второй выходы блока формирования траекторных параметров по отклонениям от глиссады и осевой линии ВПП соединены с входами первых сумматоров блока фильтрации, третьи выходы бортовой аппаратуры потребителей по дальности Dгрм и Dкрм ЛА до радиомаяков ГРМ и КРМ соединены через блоки умножения с первыми входами интеграторов блока фильтрации, вторые входы блоков умножения через схемы НЕ подключены к первым двум выходам КРП, вторые выходы которого подключены к первым входам вторых сумматоров блока фильтрации, соединенных со вторыми входами интеграторов, подключенных ко вторым входам первых сумматоров, выходы которых подключены ко вторым входам вторых сумматоров, выделенные блоком фильтрации траекторные параметры используют для формирования управляющих сигналов посадки ЛА.
Для обеспечения автоматического взлета-посадки дрона на приоконные посадочные площадки в городских условиях рассматриваемая система непригодна по следующим причинам:
1. Система предназначена для автоматической посадки летательных аппаратов самолетного типа на традиционные взлетно/посадочные полосы аэропортов, где навигационной точности в несколько метров, обеспечиваемой оборудованием самолета и аэропорта вполне достаточно для безопасной посадки летательных аппаратов. Для автоматического взлета-посадки дрона в случае коммерческой доставки грузов в городских условиях на приоконные посадочные площадки отклонение его наведения должна составлять не более 10-15 см, а в случае замены или заряда аккумуляторов дрона - долей сантиметра.
2. Рассматриваемая система принципиально расчитана только на случай когда посадочная площадка, находится снизу относительно летательного аппарата, а в случае дрона в момент перехода от глобальной спутниковой навигации к локальной навигации относительно посадочной площадки на стене многоквартирного дома дрон может находиться относительно посадочной площадки и слева, и справа, и сверху, и снизу, и спереди, и сзади.
3. Система не обеспечивает автоматического взлета летательного аппарата в условиях пространственных ограничений на траекторию взлета.
4. При навигации во время процесса посадки летательного аппарата по отклонениям от равносигнальной плоскости, создаваемой наземными радиомаяками, по мере приближении к ним растет коэффициент усиления и система становится неустойчивой. Ограничение сигналов отклонения снижает точность и усложняет систему посадки.
5. Для вычисления полетных параметров летательного аппарата в режиме реального времени требуется полноценный быстродействующий и достаточно дорогой бортовой компьютер, что делает коммерчески невыгодным использование БПЛА для доставки массовых небольших и недорогих грузов, например, заказных обедов, лекарств, почты и т.п.
6. При выработке команд управления летельным аппаратом система не учитывает специфики набора и форматов команд дронов вертолетного типа.
7. После посадки в системе не предусмотрена фиксация положения летательного аппарата и, учитывая относительно небольшой вес малоразмерного дрона, он легко может быть сброшен порывом ветра с небольшой посадочной площадки.
8. Выступающие горизонтальные приоконные посадочные площадки нарушают внешний вид строений и могут затенять дневной свет в помещениях, что также может служить препятствием для внедрения рассматриваемой системы.
Известна система, в упомянутом патенте «Способ точной посадки беспилотного летательного аппарата» (патент РФ №2615587, МПК: В5439/00, опубл. 05.04.2017), которая используется в качестве прототипа предлагаемой системы. Указанная система содержит оптическую метку, оптическую камеру, бортовой компьютер, полетный контроллер, спутниковую систему навигации, гироскоп, акселерометр, магнитометр, барометр, другие датчики, причем выход оптической камеры связан с первым входом бортового компьютера, первый и второй выход которого связаны соответственно с первым и вторым входами полетного контроллера, третий, четвертый, пятый, шестой, седьмой, восьмой входы которого связаны соответственно с выходами спутниковой системы навигации, гироскопа, акселерометра, магнитометра, барометра и других датчиков, второй, третий и четвертый входы бортового компьютера связаны соответственно с первым, вторым и третьим выходами полетного контроллера.
Недостатки данной системы повторяют недостатки реализуемого ею способа, и перечислены выше при описании этого способа.
Задача настоящего изобретения заключается в разработке способа и системы, обеспечивающих дрону, способному выполнять любую из команд движения -вперед, назад, вправо, влево, вверх, вниз, вращение по и против часовой стрелки - возможность автоматического взлета/посадки по любой предварительно задаваемой курсо-глиссаде с абсолютной точностью в гнездо в межоконном промежутке многоэтажного дома.
Техническим результатом изобретения является расширение функциональных возможностей дронов за счет придания им возможности взлета-посадки с обходом препятствий (крон деревьев, рекламных щитов, электрических проводов и т.п.), обеспечивающее их более широкое использование по доставке грузов в городских условиях.
Технический результат достигается тем, что в способ автоматического взлета-посадки дрона, содержащий операцию коррекции траектории посадки дрона, добавлены следующие операции:
- при взлете и посадке с борта дрона излучают в близлежащее окружающее пространство импульсы переменного высокочастотного излучения, в которых закодирован адрес доставки груза;
- при взлете и посадке во всех потенциально возможных местах посадки дрона, попавших в зону высочастотного облучения, принимают и декодируют указанное излучение, однако импульсы ответного высокочастотного излучения формируют лишь с места, соответствующего адресу доставки груза;
- при взлете и посадке по каждому ответному сигналу с места доставки груза в объеме высокочастотного облучения формируют импульс ультразвукового излучения, определяющий положение нужной курсо-глиссады взлета-посадки дрона в пространстве, посредством заполнения при взгляде в направлении курсо-глиссады в место посадки левого верхнего квадранта пространства излучением частоты f11, нижнего левого квадранта излучением частоты f21, правого верхнего квадранта излучением частоты f12, и правого нижнего квадранта излучением частоты f22;
- при взлете и посадке при отсутствии приема акустических импульсов в левой или в правой фронтальных частях дрона, или при его левом азимутальном отклонении более установочного значения осуществляют с постоянной скоростью левое вращение (против часовой стрелки) дрона до достижения устойчивого приема акустических импульсов в указанных местах;
- при взлете и посадке по времени запаздывания прихода акустических импульсов к фронтальной части дрона относительно соответствующих зондирующих высокочастотных сигналов с борта дрона определяют его расстояние до источника акустического излучения, а по временной разнице прихода акустического импульса к левой и правой частях фронтальной части дрона определяют степень азимутального отклонения продольной оси дрона от источника акустического излучения;
- при взлете и посадке при наличии азимутального отклонения дрона от источника акустического излучения более установочного значения дрон с постоянной скоростью вращают в сторону, противоположную отклонению, до его исключения;
- при взлете и посадке при азимутальном отклонении дрона от источника акустического излучения не более установочного значения и отсутствии приема на борту дрона акустических излучений частот f21 и f22 дрон с постоянной скоростью снижают до нарушения условий перемещения дрона вниз;
- при взлете и посадке при азимутальном отклонении дрона от источника акустического излучения не более установочного значения и отсутствии приема на борту дрона акустических излучений частот f11 и f12 дрон отцепляют (если он прикреплен) от взлетно-посадочного гнезда и с постоянной скоростью поднимают до нарушения условий перемещения дрона вверх;
- при взлете и посадке при азимутальном отклонении дрона от источника акустического излучения не более установочного значения и отсутствии приема на борту дрона акустических излучений частот f12 и f22 дрон с постоянной скоростью перемещают вправо до нарушения условий перемещения дрона вправо;
- при взлете и посадке при азимутальном отклонении дрона от источника акустического излучения не более установочного значения и отсутствии приема на борту дрона акустических излучений частотой f11 и f21 дрон с постоянной скоростью перемещают влево до нарушения условий перемещения дрона влево;
- при взлете дрона при азимутальном отклонении дрона от источника акустического излучения не более установочного значения и приеме на борту дрона акустического излучения одновременно частот f11, f12, f21 и f22, а также отдаления дрона от источника акустических импульсов менее максимального установочного расстояния, дрон с постоянной скоростью смещают назад (задним ходом) до нарушения условий перемещения дрона назад;
- при взлете дрона при азимутальном отклонении дрона от источника акустического излучения не более установочного значения и приеме на борту дрона акустического излучения одновременно частот f11, f12, f21 и f22, а также отдалении дрона от источника акустических импульсов на максимальное установочное расстояние, обеспечивают зависание дрона, считая взлет завершенным, и передают управление полетному контроллеру;
- при посадке дрона при азимутальном отклонении дрона от источника акустического излучения не более установочного значения и приеме на борту дрона акустического излучения частот f11, f12, f21 и f22, а также удалении дрона от источника акустических импульсов более минимального установочного расстояния, его с постоянной скоростью смещают вперед до нарушения условий перемещения дрона вперед;
- при посадке дрона при азимутальном отклонении дрона от источника акустического излучения не более установочного значения и приеме на борту дрона акустического излучения одновременно частот f11, f12, f21 и f22, а также приближения дрона к источнику акустических импульсов на минимальное установочное расстояние, его с постоянной скоростью снижают до приобретения устойчивого физического контакта с взлетно-посадочным гнездом;
- при посадке дрона при получении сообщения о завершении посадки выключают двигатели дрона, прикрепляют его к взлетно-посадочному гнезду и отцепляют поддон с доставляемым грузом;
- при возникновении комплексов условий, не соответствующих ни одной из описанных выше ситуаций продолжают выполнение последней выбранной операции;
причем коррекцию траектории посадки дрона в последней операции посадки с целью получения абсолютной точности позиционирования дрона относительно взлетно-посадочного гнезда выполняют механическим образом посредством самоцентрирующегося шлицевого соединения дрона с взлетно-посадочным гнездом с замыканием соединения под действием силы тяжести дрона.
Технический результат достигается также тем, что в систему автоматического взлета-посадки дрона, содержащую на борту дрона полетный контроллер, своими первым, вторым, третьим, четвертым и пятым входами связанный с выходами, соответственно, спутниковой системы навигации, гироскопа, акселерометра, магнитометра и барометра дополнительно введены на борту дрона:
левый акустический датчик, первый формирователь, запоминающий фильтр-формирователь сигналов f11, запоминающий фильтр-формирователь сигналов f21, постоянное запоминающее устройство (ПЗУ) команд взлета, правый акустический датчик, второй формирователь, запоминающий фильтр-формирователь сигналов f22, запоминающий фильтр-формирователь сигналов f22, ПЗУ команд посадки, датчик завершения посадки, определитель азимутального отклонения, посадочное шасси-антенна, фиксатор дрона в гнезде, первый RS-триггер, фиксатор груза,
причем выход левого акустического датчика связан с входом первого формирователя и входами запоминающих фильтров-формирователей сигналов f11 и f21, выход первого формирователя соединен с первым входом определителя азимутального рассогласования, выходы запоминающих фильтров-формирователей сигналов f11 и f21 связаны с первыми входами ПЗУ-команд взлета и ПЗУ-команд посадки, выход правого акустического датчика связан с входом второго формирователя и входами запоминающих фильтров-формирователей сигналов f12 и f22, выход второго формирователя соединен со вторым входом определителя азимутального отклонения, выходы запоминающих фильтров-формирователей сигналов f12 и f22 связаны со вторыми входами ПЗУ-команд взлета и ПЗУ-команд посадки, шина первого выхода определителя азимутального отклонения связана с третьими входами ПЗУ-команд взлета и ПЗУ-команд посадки, второй и третий выходы определителя азимутального отклонения соединены соответственно с четвертыми входами ПЗУ-команд посадки и ПЗУ-команд взлета, четвертый выход определителя азимутального отклонения соединен с шестым входом полетного контроллера, выход датчика завершения посадки связан с пятым входом ПЗУ-команд посадки и первым входом первого RS-триггера, первый выход полетного контроллера связан с шестым входом ПЗУ-команд посадки, второй выход полетного контроллера связан с пятым входом ПЗУ-команд взлета и вторым входом первого RS-триггера, четвертый выход определителя азимутального отклонения соединен с шестым входом полетного контроллера, седьмой вход которого связан с выходами ПЗУ-команд взлета и ПЗУ-команд посадки, выход посадочного шасси-антенны связан с третьим входом определителя азимутального отклонения, первый выход первого RS-триггера связан входом фиксатора дрона в гнезде, второй выход первого RS-триггера соединен с входом фиксатора груза, пятый выход определителя азимутального отклонения связан с восьмым входом полетного контроллера,
а у адресата доставки груза добавлено взлетно-посадочное гнездо, причем левый и правый акустические датчики размещены по краям фронтальной части дрона симметрично относительно его продольной оси и имеют диаграмму направленности приема, совпадающую с передней полусферой относительно корпуса дрона,
причем приемно-передающая посадочная шасси-антенна дрона имеет полносферическую диаграмму направленности,
причем посадочное шасси-антенна дрона выполнено из трубчатого металла, с гладкой внешней поверхностью, квадратным в плане, по размеру нижней части каркаса дрона, с  по форме сторонами,
по форме сторонами,
причем определитель азимутального отклонения включает в себя: второй RS-триггер, считыватель сигнала транспондера, блок ввода адреса доставки, первый счетчик, первый генератор импульсов, второй генератор импульсов, первый компаратор, второй счетчик, третий RS-триггер, ждущий мультивибратор, логический элемент И, второй компаратор, третий компаратор, блок ввода установочных расстояний,
причем в определителе азимутального отклонения его первый, второй и третий входы представлены в нем первыми входами соответственно второго RS-триггера, третьего RS-триггера и считывателя сигнала транспондера, шина первого выхода определителя азимутального отклонения представлена шиной выхода первого компаратора, второй, третий и четвертый выходы определителя азимутального отклонения представлены соответственно выходом третьего компаратора, выходом второго компаратора и выходом ждущего мультивибратора, пятый выход определителя азимутального отклонения представлен выходом блока ввода адреса доставки, который также связан со вторым входом считывателя сигналов транспондера, выход которого связан со вторыми входами второго и третьего RS-триггеров, первый и второй выходы второго RS-триггера соединены соответственно с первыми входами первого счетчика и логического элемента И, выход первого генератора импульсов связан со вторым входом первого счетчика и первым входом второго счетчика, выход второго генератора импульсов связан с третьим входом считывателя сигналов транспондера, третьим входом первого счетчика и вторым входом второго счетчика, первый и второй выходы третьего RS-триггера соединены соответственно с третьим входом второго счетчика и вторым входом логического элемента И, выход первого счетчика связан с первым входом первого компаратора, выход второго счетчика связан со вторым входом первого компаратора и первыми входами второго и третьего компараторов, выход логического элемента И соединен с входом ждущего мультивибратора, выход которого связан с третьим входом первого компаратора и вторыми входами второго и третьего компараторов, первый и второй выходы блока ввода установочных расстояний связаны с третьими входами соответственно второго и третьего компараторов,
причем взлетно-посадочное гнездо включает в себя:
двухстворчатую опорную раму, фиксатор положения поворотной части опорной рамы, посадочную крестовину, одностепенной шарнир, фиксатор положения одно степенного шарнира, транспондер, блок акустических излучателей,
причем двухстворчатая опорная рама одной створкой прикреплена к левому или правому вертикальному откосу окна адресата, а в нижней части другой подвижной створки прикреплена в горизонтальном положении посадочная крестовина, а в верхней части подвижной створки опорной рамы прикреплен одностепенной шарнир с прикрепленными на нем рядом транспондером и блоком акустических излучателей, на петлях стыка двухстворчатой опорной рамы установлен фиксатор положения подвижной створки, на одностепенном шарнире установлен фиксатор его положения,
причем посадочная крестовина выполнена прямоугольной с размахом не менее ширины посадочного шасси-антенны дрона, увеличенной на величину удвоенного максимального отклонения дрона при посадке, а ветви посадочной крестовины выполнены в виде трубчатых подшипников,
причем блок акустических излучателей включает в себя:
акустический излучатель частоты f11, акустический излучатель частоты f12, акустический излучатель частоты f21, акустический излучатель частоты f22, транспондер-делитель пространства излучений, выход которого связан с входами всех излучателей блока акустических излучателей,
причем корпус транспондера-делителя пространства излучений выполнен в виде профиля крестообразной формы, в углы которого помещены одинаково направленные в сторону открытого пространства перечисленные выше акустические излучатели,
причем диаграммы направленности приема-излучения электромагнитного излучения транспондера-делителя пространства излучений и диаграммы направленности акустических излучателей являются полусферическими, а корпус транспондера обеспечивает ограничение акустического излучения каждой из частот f11, f21, f12, f22 своей четвертью полусферы.
Технический результат достигается за счет введения в заявляемые способ и систему новых действий, блоков и связей, которые в совокупности ранее неизвестны и которые обеспечивают относительно простыми средствами автоматический взлет/посадку дрона по произвольно задаваемой курсо-глиссаде в обход препятствий, с абсолютной точностью его посадки во взлетно-посадочное гнездо и фиксацией дрона в нем для предотвращения сбрасывания дрона порывами ветра, а также конструкцией взлетно-посадочного гнезда не портящей архитектурный облик здания-носителя взлетно-посадочного гнезда и не затеняющей его внутренние помещения.
Заявляемый способ автоматического взлета-посадки дрона поясняется табл. 1 (Условия выполнения базисных команд полетного контроллера) и включает в себя следующие операции:
D1 - при взлете и посадке с борта дрона излучают в близлежащее окружающее пространство импульсы переменного высокочастотного излучения, в которых закодирован адрес доставки груза;
D2 - при взлете и посадке во всех потенциально возможных местах посадки дрона, попавших в зону высочастотного облучения, принимают и декодируют указанное излучение, однако импульсы ответного высокочастотного излучения формируют лишь с места, соответствующего адресу доставки груза;
D3 - при взлете и посадке по каждому ответному сигналу с места доставки груза в объеме высокочастотного облучения формируют импульс ультразвукового излучения, определяющий положение нужной курсо-глиссады взлета-посадки дрона в пространстве, посредством заполнения при взгляде в направлении курсо-глиссады в место посадки левого верхнего квадранта пространства излучением частоты f11, нижнего левого квадранта излучением частоты f21, правого верхнего квадранта излучением частоты f12, и правого нижнего квадранта излучением частоты f22;
D4 - при взлете и посадке при отсутствии приема акустических импульсов в левой или в правой фронтальных частях дрона, или при его левом азимутальном отклонении более установочного значения осуществляют с постоянной скоростью левое вращение (против часовой стрелки) дрона до достижения устойчивого приема акустических импульсов в указанных местах;
D5 - при взлете и посадке по времени запаздывания прихода акустических импульсов к фронтальной части дрона относительно соответствующих зондирующих высокочастотных сигналов с борта дрона определяют его расстояние до источника акустического излучения, а по временной разнице прихода акустического импульса к левой и правой частях фронтальной части дрона определяют степень азимутального отклонения продольной оси дрона от источника акустического излучения;
D6 - при взлете и посадке при наличии азимутального отклонения дрона от источника акустического излучения более установочного значения дрон с постоянной скоростью вращают в сторону, противоположную отклонению, до его исключения;
D7 - при взлете и посадке при азимутальном отклонении дрона от источника акустического излучения не более установочного значения и отсутствии приема на борту дрона акустических излучений частот f21 и f22 дрон с постоянной скоростью снижают до нарушения условий перемещения дрона вниз;
D8 - при взлете и посадке при азимутальном отклонении дрона от источника акустического излучения не более установочного значения и отсутствии приема на борту дрона акустических излучений частот f11 и f12 дрон отцепляют (если он прикреплен) от взлетно-посадочного гнезда и с постоянной скоростью поднимают до нарушения условий перемещения дрона вверх;
D9 - при взлете и посадке при азимутальном отклонении дрона от источника акустического излучения не более установочного значения и отсутствии приема на борту дрона акустических излучений частот f12 и f22 дрон с постоянной скоростью перемещают вправо до нарушения условий перемещения дрона вправо;
D10 - при взлете и посадке при азимутальном отклонении дрона от источника акустического излучения не более установочного значения и отсутствии приема на борту дрона акустических излучений частотой f11 и f21 дрон с постоянной скоростью перемещают влево до нарушения условий перемещения дрона влево;
D11 - при взлете дрона при азимутальном отклонении дрона от источника акустического излучения не более установочного значения и приеме на борту дрона акустического излучения одновременно частот f11, f12, f21 и f22, а также отдаления дрона от источника акустических импульсов менее максимального установочного расстояния, дрон с постоянной скоростью смещают назад (задним ходом) до нарушения условий перемещения дрона назад;
D12 - при взлете дрона при азимутальном отклонении дрона от источника акустического излучения не более установочного значения и приеме на борту дрона акустического излучения одновременно частот f11, f12, f21 и f22, а также отдалении дрона от источника акустических импульсов на максимальное установочное расстояние, обеспечивают зависание дрона, считая взлет завершенным, и передают управление полетному контроллеру;
D13 - при посадке дрона при азимутальном отклонении дрона от источника акустического излучения не более установочного значения и приеме на борту дрона акустического излучения частот f11, f12, f21 и f22, а также удалении дрона от источника акустических импульсов более минимального установочного расстояния, его с постоянной скоростью смещают вперед до нарушения условий перемещения дрона вперед;
D14 - при посадке дрона при азимутальном отклонении дрона от источника акустического излучения не более установочного значения и приеме на борту дрона акустического излучения одновременно частот f11, f12, f21 и f22, а также приближения дрона к источнику акустических импульсов на минимальное установочное расстояние, его с постоянной скоростью снижают до приобретения устойчивого физического контакта с взлетно-посадочным гнездом;
D15 - при посадке дрона при получении сообщения о завершении посадки выключают двигатели дрона, прицепляют его к взлетно-посадочному гнезду и отцепляют поддон с доставляемым грузом;
D16 - при возникновении комплексов условий, не соответствующих ни одной из описанных выше ситуаций продолжают выполнение последней выбранной операции;
D17 - при посадке дрона с целью получения абсолютной точности его позиционирования относительно взлетно-посадочного гнезда в операции D14 выполняют коррекцию траектории посадки дрона механическим образом посредством самоцентрирующегося треугольного шлицевого соединения дрона с взлетно-посадочным гнездом с замыканием соединения под действием силы тяжести дрона.
Предлагаемый способ автоматического взлета-посадки дрона работает следующим образом. В целях обеспечения переносимости способа на дроны с различными по функциональным возможностям полетными контроллерами далее принимаются постулаты о том, что в любой момент времени может выполняться только одна из базисных команд - ЗАВИСАНИЕ, ВРАЩЕНИЕ ВЛЕВО (против часовой стрелки), ВРАЩЕНИЕ ВПРАВО, движение ВВЕРХ, ВНИЗ, ВЛЕВО, ВПРАВО, ВПЕРЕД, НАЗАД, ВЫКЛЮЧЕНИЕ, ПРОДОЛЖЕНИЕ (выполнения предыдущей операции) -, выполняется она во время действия соответствующего комплекса условий и с неизменным ее значением. Основанием принятия данных положений служат малые значения расстояний (до 20 м) и скоростей перемещения (доли м/с) дрона в процессах его взлета и посадки в рассматриваемой задаче и серьезное упрощение ее решения.
В отличие от аналогов в предлагаемом способе используется ситуационный принцип выбора в каждый момент времени команд полетному контроллеру. Текущая ситуация конкретизируется выполнением определенного комплекса условий. Выполнение тех или иных комплексов условий далее будет выражаться выполнением соответствующих логических выражений, составленных из булевых переменных, отражающих появление или отсутствие некоторых элементарных событий. В качестве элементарных булевых событий-переменных далее рассматриваются следующие:
I - имеет место санкция на посадку;
О - имеет место санкция на взлет;
Н11 - дрон принимает акустическое излучение частотой f11;
Н21 - дрон принимает акустическое излучение частотой f21;
Н12 - дрон принимает акустическое излучение частотой f12;
Н22 - дрон принимает акустическое излучение частотой f22;
L - имеет место левое азимутальное отклонение дрона от ориентира;
R - имеет место правое азимутальное отклонение дрона от ориентира;
N - имеет место приближение дрона к взлетно-посадочному гнезду на минимальное установочное расстояние;
U - имеет место удаление дрона от взлетно-посадочного гнезда на максимальное установочное расстояние; Р - имеет место завершение посадки дрона.
Отсутствие (инверсия) некоторого события обозначается далее строчным изображением соответствующей булевой переменной. В логических формулах операция конъюнкции булевых переменных обозначается далее их последовательным написанием, а операция дизъюнкции обозначается далее знаком V. Тогда условия выполнения базисных команд полетного контроллера при взлете и посадке формально выражаются данными табл. 1. В каждый момент может формироваться лишь одна команда полетному контроллеру. В случае возникновения условий выполнения одновременно нескольких команд выполняется команда с наиболее высоким приоритетом. Приоритеты команд указаны в табл. 1, причем 6 считается наивысшим приоритетом.
При взлете дрона исходным состоянием является состояние покоя (двигатели выключены) дрона и дрон находится в разъемном треугольном шлицевом соединении дрона с взлетно-посадочным гнездом и этому состоянию дрона соответствует комплекс условий io. При этом левая и правая фронтальной части дрона расположены симметрично относительно источника акустических импульсов, дрон находится на минимальном, заранее декларируемом, расстоянии от вертикальной конструкции взлетно-посадочного гнезда 12, дрон принимает акустические сигналы частот f21 и f22, и не принимает частоты f11 и f12.
При наличии общей санкции на взлет оказывается сформированным комплекс условий iOlrh11h12 и из всех приведенных в табл. 1 логических выражений лишь это выражение дает значение ИСТИНА. Согласно табл. 1 в этом случае полетному контроллеру будет сформирована команда перемещения ВВЕРХ и дрон будет перемещаться вверх до приема акустического излучения частот f11 или f12, т.е. до достижения курсо-глиссадного канала.
Если же в процессе выполнения предыдущей команды движение ВВЕРХ дрон развернет более заранее декларируемого значения по часовой стрелки (вправо), то изо всех логических выражений табл. 1 значение ИСТИНА примет только выражение iOR. В этом случае для полетного контроллера будет сформирована команда ВРАЩЕНИЕ ВЛЕВО, которая будет поддерживаться до устранения правого азимутального отклонения.
Если по каким-либо причинам, например под действием порыва ветра, дрон в процессе выполнения предыдущей команды развернет более заранее декларируемого значения, например против часовой стрелки (влево), то изо всех логических выражений табл. 1 значение ИСТИНА примет только выражение IoLr. В этом случае для полетного контроллера формируют команду ВРАЩЕНИЕ ВПРАВО и поддерживают ее до устранения левого азимутального отклонения.
Даже при отсутствии или после ликвидации азимутального отклонения в процессе вхождения дрона в курсо-глиссадный канал возможно его линейное смещение. Первоначально устраняется вертикальное отклонение.
При вертикальном смещении выше плоскости глиссады на борту дрона будут приниматься акустические импульсы частоты f11 или f12 и не будут приниматься акустические импульсы частот f21 и f22. Тогда значение ИСТИНА примет лишь логическое выражение iOlrh21h22 и в соответствии с табл. 1 полетному контроллеру формируют команду движения ВНИЗ. Эту команду поддерживают до устранения отклонения дрона.
При вертикальном смещении ниже плоскости глиссады на борту дрона будут приниматься акустические импульсы частоты f21 или f22 и не будут приниматься акустические импульсы частот f11 и f12. Тогда значение ИСТИНА примет лишь логическое выражение iOlrh11h12 и в соответствии с табл. 1 полетному контроллеру формируют команду движения ВВЕРХ. Эту команду поддерживают до устранения отклонения дрона.
Затем устраняется смещение дрона относительно курсо-глиссады по горизонтали, если оно есть. Если происходит смещение дрона влево, то происходит потеря акустического излучения частот f12 и f22. Тогда значение ИСТИНА принимает логическое выражение iOlrh12h22 и в соответствии с табл.1 полетному контроллеру формируется команда перемещения ВПРАВО. Эта команда выполняется до изменения комплекса условий ее вызывающих.
Если происходит смещение дрона вправо, то происходит потеря акустического излучения частот f11 и f21. Тогда значение ИСТИНА принимает логическое выражение iOlrh11h21 и в соответствии с табл. 1 полетному контроллеру формируется команда перемещения ВЛЕВО. Эта команда выполняется до изменения комплекса условий ее вызывающих.
Если в результате вхождения дрона в курсо-глиссадный канал и выполнения при необходимости корректирующих действий отсутствуют азимутальное и линейные отклонения, то значение ИСТИНА принимает лишь логическое выражение iOlruН11H12Н21H22 и в соответствии с табл. 1 полетному контроллеру формируют команду движения НАЗАД. Выполнение указанной команды продолжают до достижения дроном максимального, заранее декларируемого, расстояния, либо до нарушения условий выполнения команды движения НАЗАД вследствие отклонения дрона из курсо-глиссадного канала.
В случае отклонения дрона от курсо-глиссадного канала его возвращают обратно с помощью ранее описанных команд ВРАЩЕНИЕ ВЛЕВО, ВРАЩЕНИЕ ВПРАВО, ВВЕРХ, ВНИЗ, ВЛЕВО, ВПРАВО.
В случае отсутствия азимутального и линейных отклонений дрона от курсо-глиссадного канала и достижения дроном максимального, заранее декларируемого, расстояния, значение ИСТИНА принимает лишь логическое выражение iOlrUH11H12Н21H22 и в соответствии с табл. 1 полетному контроллеру формируют команду ЗАВИСАНИЕ. На этом процесс взлета дрона считают завершенным и дальнейшее управление дроном передают его полетному контроллеру.
При устранении линейных отклонений дрона от курсо-глиссадного канала чисто формально (но не практически) может возникнуть неоднозначность в выборе команд горизонтального и вертикального движения дрона вследствие частичного пересечения логических областей определения указанных команд. Тогда при выборе для выполнения очередной команды движения дрона выбирают команду с наибольшим по номеру приоритетом (табл. 1).
Исходным состоянием дрона при посадке является ЗАВИСАНИЕ на некотором (до 20 метров) расстоянии от взлетно-посадочного гнезда в точке пространства, куда привел дрон полетный контроллер с использованием глобальной спутниковой навигации GPS/ГЛОНАСС в результате идентификации по принципу запрос-ответ транспондера взлетно-посадочного гнезда. Чтобы обеспечить траекторию и точность, необходимую для безопасной посадки дрона на приоконное взлетно-посадочное гнездо, согласно предлагаемому способу дрон необходимо сориентировать так, чтобы он мог принимать акустического излучение от взлетно-посадочного гнезда и чтобы азимутальное отклонение его продольной оси от направления на источник указанного акустического излучения не превышало заранее декларируемой величины. Если при посадке на борту дрона не принимают акустического излучения от взлетно-посадочного гнезда, либо указанные сигналы на борту дрона принимают, но имеет место правое (по часовой стрелке) азимутальное отклонение дрона, то принимает значение ИСТИНА лишь логическое выражение IoR и в соответствии с табл. 1 для полетного контроллера формируют команду ВРАЩЕНИЕ ВЛЕВО (против часовой стрелки), которую поддерживают до устранения азимутального отклонения дрона.
В случае наличия левого азимутального отклонения значение ИСТИНА принимает лишь логическое выражение IoLr и в соответствии с табл. 1 полетному контроллеру дрона формируют команду ВРАЩЕНИЕ ВПРАВО, которую поддерживают до устранения азимутального отклонения.
Даже при отсутствии или после ликвидации азимутального отклонения дрона возможно его смещение по вертикали относительно плоскости глиссады. При вертикальном смещении выше плоскости глиссады на борту дрона будут логическое выражение Iolr(h21h22V N) и в соответствии с табл. 1 полетному контроллеру формируют команду движения ВНИЗ. Эту команду поддерживают до устранения отклонения дрона.
При вертикальном смещении ниже плоскости глиссады на борту дрона будут приниматься акустические импульсы частоты f21 или f22 и не будут приниматься акустические импульсы частот f11 и f12. Тогда значение ИСТИНА примет лишь логическое выражение Iolrh11h12 и в соответствии с табл.1 полетному контроллеру формируют команду движения ВВЕРХ. Эту команду поддерживают до устранения отклонения дрона.
После устранения отклонения дрона от плоскости глиссады по вертикали осуществляют устранение отклонение дрона от курсо-глиссады по горизонтали. Если при отсутствии азимутального отклонения имеет место смещение дрона влево, то происходит потеря акустического излучения частот f12 и f22. Тогда значение ИСТИНА принимает логическое выражение Iolrh12h22 и в соответствии с табл. 1 полетному контроллеру формируется команда перемещения ВПРАВО. Эта команда выполняется до устранения смещения влево, либо до изменения комплекса условий ее вызывающих.
Если при отсутствии азимутального отклонения имеет место смещение дрона вправо, то происходит потеря акустического излучения частот f11 и f21. Тогда значение ИСТИНА принимает логическое выражение Iolrh11h21 и в соответствии с табл. 1 полетному контроллеру формируется команда перемещения ВЛЕВО. Эта команда выполняется до устранения смещения вправо, либо до изменения комплекса условий ее вызывающих.
Поскольку в процессе маневрирования дрона в плоскости глиссады возможно возникновение азимутальных отклонений более заранее декларируемой допустимой величины, то выполнение команд движений ВЛЕВО и ВПРАВО может прерываться выполнением команд ВРАЩЕНИЕ ВЛЕВО и ВРАЩЕНИЕ ВПРАВО.
После вхождения дрона боком в курсо-глиссадный канал возникают условия для продвижения его в этом канале. А-именно, значение ИСТИНА принимает логическое выражение IolRrH11H22H21H12 и в соответствии с табл. 1 полетному контроллеру формируют команду ВПЕРЕД. Эта команда выполняется до достижения дроном минимального установочного расстояния до источника акустических импульсов, либо до нарушения условий ее вызвавших.
В процессе горизонтального продвижения дрона вдоль курсо-глиссадного канала, а также порывов ветра возможны выходы дрона из указанного канала. Тогда движение дрона вперед прерывается и с помощью ранее описанных команд ВРАЩЕНИЕ ВЛЕВО, ВРАЩЕНИЕ ВПРАВО, движение ВНИЗ, ВВЕРХ, ВЛЕВО, ВПРАВО дрон возвращается в курсо-глиссадный канал.
Когда дрон по курсо-глиссадному каналу приближается к источнику акустического излучения на минимальное установочное расстояние при отсутствии азимутального и линейных отклонений значение ИСТИНА принимает лишь логическое выражение Iolr(h21h22V N) и в соответствии с табл. 1 полетному контроллеру формируют команду движения ВНИЗ. Эта команда является предпоследней в процессе посадки дрона и выполняют ее до возникновения события Р о завершении посадки. В процессе выполнения этой команды дрон вступает в физический контакт с конструкцией взлетно-посадочного гнезда и центрируется относительно него посредством создания между ними разъемного треугольного шлицевого соединения. Таким образом, в этой операции при посадке дрона реализуют механическую коррекцию траектории движения дрона с целью получения абсолютной точности позиционирования дрона относительно взлетно-посадочного гнезда.
После возникновения сообщения о завершении посадки дрона значение ИСТИНА принимает лишь логическое выражение IоР и в соответствии с табл. 1 для полетного контроллера формируют команду ПОКОЙ, которая означает выключение двигателей дрона и отцепление доставленного груза на специальном поддоне. При этом дроном будут приниматься акустические импульсы частоты f11 или f12 и не будут приниматься акустические импульсы частот f21 и f22. Эта команда поддерживается до формирования новой санкции на взлет.
Система для реализации предлагаемого способа поясняется чертежами и таблицами:
Фиг. 1 Маневренные возможности дрона.
Фиг. 2 Функциональная схема системы.
Фиг. 3 Взлетно-посадочное гнездо.
Фиг. 4 Формирование курсо-глиссады.
Фиг. 5 Определитель азимутального отклонения.
Табл. 1 Условия выполнения базисных команд полетного контроллера.
Табл. 2 Содержимое ПЗУ-команд взлета.
Табл. 3 Содержимое ПЗУ-команд посадки.
Введены следующие обозначения:
1 - левый акустический датчик,
2 - первый формирователь,
3 - запоминающий фильтр-формирователь сигналов f11,
4 - запоминающий фильтр-формирователь сигналов f21,
5 - датчик завершения посадки,
6 - ПЗУ команд посадки,
7 - ПЗУ команд взлета,
8 - правый акустический датчик,
9 - второй формирователь,
10 - запоминающий фильтр-формирователь сигналов f12,
11 - запоминающий фильтр-формирователь сигналов f22,
12 - взлетно-посадочное гнездо,
13 - посадочное шасси-антенна,
14 - определитель азимутального отклонения,
15 - спутниковая система навигации,
16 - полетный контроллер,
17 - гироскоп,
18 - акселерометр,
19 - магнитометр,
20 - барометр,
21 - фиксатор дрона в гнезде,
22 - первый RS-триггер,
23 - фиксатор груза,
причем взлетно-посадочное гнездо 12 (фиг. 3)включает в себя:
24 - двухстворчатая опорная рама,
25 - посадочная крестовина,
26 - фиксатор положения поворотной части опорной рамы,
27 - одностепенной шарнир,
28 - фиксатор положения одно степенного шарнира,
29 - транспондер-делитель пространства,
30 - блок акустических излучателей,
причем блок акустических излучателей 27 (фиг. 4) включает в себя:
31 - акустический излучатель частоты f11,
32 - акустический излучатель частоты f12,
33 - акустический излучатель частоты f21,
34 - акустический излучатель частоты f22,
причем определитель азимутального рассогласования 14 (фиг. 5) включает в себя:
35 - второй RS-триггер,
36 - считыватель сигналов транспондера,
37 - блок ввода адреса доставки,
38 - первый счетчик,
39 - первый генератор импульсов,
40 - второй генератор импульсов,
41 - первый компаратор,
42 - второй счетчик,
43 - третий RS-триггер,
44 - ждущий мультивибратор,
45 - логический элемент И,
46 - второй компаратор,
47 - третий компаратор,
48 - блок ввода установочных расстояний,
причем взлетно-посадочное гнездо 12 и все включенные в него блоки и связи размещены в приоконном пространстве адресата, а остальные блоки размещены на борту дрона,
причем выход левого акустического датчика 1 связан с входом первого формирователя 2 и входами запоминающих фильтров-формирователей сигналов f11 3 и f21 4, выход первого формирователя 2 соединен с первым входом определителя азимутального отклонения 14, выходы запоминающих фильтров-формирователей сигналов f11 3 и f21 4 связаны с первыми входами (адресной шины) ПЗУ-команд взлета 7 и ПЗУ-команд посадки 6, выход правого акустического датчика 8 связан с входом второго формирователя 9 и входами запоминающих фильтров-формирователей сигналов f12 10 и f22 11, выход второго формирователя 9 соединен со вторым входом определителя азимутального отклонения 14, выходы запоминающих фильтров-формирователей сигналов f12 10 и f22 11 связаны со вторыми входами (адресных шинн) ПЗУ-команд взлета 7 и ПЗУ-команд посадки 6, шина первого выхода определителя азимутального отклонения 14 связана с третьими входами (адресной шины) ПЗУ-команд взлета 7 и ПЗУ-команд посадки 6, второй и третий выходы определителя азимутального отклонения 14 соединены соответственно с четвертыми входами (адресной шины) ПЗУ-команд посадки 6 и ПЗУ-команд взлета 7, четвертый выход определителя азимутального отклонения 14 соединен с шестым входом полетного контроллера 16, выход датчика завершения посадки 5 связан с пятым входом ПЗУ-команд посадки 6 и первым (S) входом первого RS-триггера 22, первый выход (санкции посадки) полетного контроллера 16 связан с шестым входом (выбора кристалла) ПЗУ-команд посадки 6, второй выход (санкции взлета) полетного контроллера 16 связан с пятым входом (выбора кристалла) ПЗУ-команд взлета 7 и вторым (R) входом первого RS-триггера 22, четвертый выход определителя азимутального отклонения 14 соединен с шестым входом полетного контроллера 16, (шина) седьмого входа которого связана с выходами (информационными шинами) ПЗУ-команд взлета 7 и ПЗУ-команд посадки 6, выход посадочного шасси-антенны 13 связан с третьим входом определителя азимутального отклонения 14, первый (прямой) выход первого RS-триггера 22 связан входом фиксатора дрона в гнезде 21, второй (инверсный) выход первого RS-триггера 22 соединен с входом фиксатора груза 23, полетный контроллер 16 своими первым, вторым, третьим, четвертым и пятым входами связанный с выходами, соответственно, спутниковой системы навигации 15, гироскопа 17, акселерометра 18, магнитометра 19 и барометра 20, пятый выход определителя азимутального отклонения 14 соединен с восьмым входом полетного контроллера 16, причем в определителе азимутального отклонения 14 его первый, второй и третий входы представлены в нем первыми входами соответственно второго RS-триггера 35, третьего RS-триггера 43 и считывателя сигнала транспондера 36, шина первого выхода определителя азимутального отклонения 14 представлена шиной выхода первого компаратора 41, второй, третий и четвертый выходы определителя азимутального отклонения 14 представлены соответственно выходом третьего компаратора 47, выходом второго компаратора 46 и выходом ждущего мультивибратора 44, пятый выход определителя азимутального отклонения 14 представлен выходом блока ввода адреса доставки 37, который также связан со вторым входом (шиной) считывателя сигналов транспондера 36, выход которого связан со вторыми входами второго 35 и третьего 43 RS-триггеров, первый (первый) и второй (инверсный) выходы второго RS-триггера 35 соединены соответственно с первым входом (разрешения счета) первого счетчика 38 и первым входом логического элемента И 45, выход первого генератора импульсов 39 связан со (счетным) вторым входом первого счетчика 38 и первым (счетным) входом второго счетчика 42, выход второго генератора импульсов 40 связан с третьим входом (синхронизации) считывателя сигналов транспондера 36, третьим входом (сброса) первого счетчика 38 и вторым входом (сброса) второго счетчика 42, первый и второй выходы третьего RS-триггера 43 соединены соответственно с третьим входом (разрешения счета) второго счетчика 42 и вторым входом логического элемента И 45, выход первого счетчика 38 связан с первым входом первого компаратора 41, выход второго счетчика 42 связан со вторым входом первого компаратора 41 и первыми входами второго 46 и третьего 47 компараторов, выход логического элемента И 45 соединен с входом ждущего мультивибратора 44, выход которого связан с третьим входом первого компаратора 41 и вторыми входами второго 46 и третьего 47 компараторов, первый и второй выходы блока ввода установочных расстояний 48 связаны с третьими входами соответственно второго 46 и третьего 47 компараторов, причем посадочное шасси-антенна 13 дрона выполнено из трубчатого материала, с гладкой внешней поверхностью, квадратным в плане, по размеру нижней части каркаса дрона, с по форме сторонами,
причем во взлетно-посадочном гнезде 12 двухстворчатая опорная рама 24 одной створкой прикреплена к левому или правому вертикальному откосу окна адресата, а в нижней части другой подвижной створки прикреплена в горизонтальном положении посадочная крестовина 25, а в верхней части подвижной створки опорной рамы 24 прикреплен одностепенной шарнир 27 с прикрепленными на нем транспондером-делителем пространства излучений 29 и блоком акустических излучателей 30, на петлях стыка двухстворчатой опорной рамы установлен фиксатор положения подвижной створки 26, на одностепенном шарнире установлен фиксатор его положения 28,
причем выход транспондера-делитель пространства излучений 29 связан с входами всех излучателей блока акустических излучателей 30,
причем посадочная крестовина 25 выполнена прямоугольной с размахом не менее ширины посадочного шасси-антенны 13 дрона, увеличенной на величину удвоенного максимального отклонения дрона при посадке, а ветви посадочной крестовины выполнены в виде трубчатых подшипников.
Система автоматического взлета-посадки дрона работает следующим образом. Цикл доставки груза, например обеда, дроном от поставщика, например ресторана, к потребителю в городских условиях включает в себя: заказ и оплата груза по электронным каналам, формирование поставщиком заказа в специальном контейнере, прикрепление контейнера с грузом к дрону, ввод в полетный контроллер адреса заказчика, взлет дрона из гнезда поставщика с учетом локальных ограничений, крейсерский полет дрона по заданному адресу, посадка дрона в гнездо заказчика с учетом локальных ограничений с отцеплением контейнера с грузом и промежуточной подзарядкой, и далее в обратный путь взлет дрона с учетом локальных ограничений, крейсерский полет и посадка в гнездо поставщика с учетом локальных ограничений. Предполагается, что взлетно-посадочные гнезда 12 поставщика и заказчика идентичны (фиг. 2) и для закладки и извлечения контейнера с грузом из корпуса дрона подвижную часть двухстворчатой опорной рамы 24 гнезда 12 вместе с дроном заворачивают в окно, а затем обратно отворачивают и фиксируют ее в положениии курсо-глиссады свободного от препятствий, например крон деревьев, проводов, рекламных щитов и т.п. Адрес доставки груза с помощью одноименного блока 37 в символьном виде вводят одновременно в считыватель сигнала транспондера 36 [3] и полетный контроллер 16. Предполагается, что управление макроповедением и детальное управление дроном в крейсерском полете с помощью своего программного обеспечения при использовании данных спутниковой системы навигации 15, гироскопа 17, акселерометра 18, магнитометра 19, барометра 20 реализует полетный контроллер 16. При этом символьному адресу заказчика с помощью таблицы соответствия сопоставляются определенные глобальные географические координаты, которыми руководствуется полетный контроллер 16 с использованием данных глобальных систем навигации GPS/ГЛОНАСС. авигационной точности систем GPS/ГЛОНАСС недостаточно для обеспечения взлета-посадки дрона в условиях пространственных ограничений, однако ее хватает для обеспечения электромагнитного контакта транспондера 29 адресата с бортовым считывателем сигналов траспондера 36. Поэтому на этапах взлета и посадки дрона полетный контроллер 16 посредством формирования единичных сигналов на своих первом и втором выходах, соответственно, делегирует детальное управление собой на уровне базисных команд - ЗАВИСАНИЕ, ВРАЩЕНИЕ ВЛЕВО, ВРАЩЕНИЕ ВПРАВО, движения ВВЕРХ, ВНИЗ, ВПРАВО, ВЛЕВО, ВПЕРЕД, НАЗАД, ВЫКЛЮЧЕНИЕ, ПРОДОЛЖЕНИЕ - дополнительному оборудованию системы. Дополнительное оборудование автоматически формирует, также как и в режиме ручного управления [4,5], команды полетному контроллеру 16 в формате: (код команды, значение команды) регулярно с временным интервалом для обеспечения плавного хода дрона не более 30 мсек. Для внутреннего хранения команд при взлете в системе используется ПЗУ-команд взлета 7, а команд при посадке ПЗУ-команд посадки 6. При этом базисные команды управления для определенности кодируются следующим образом: ЗАВИСАНИЕ - 0001, ВРАЩЕНИЕ ВЛЕВО - 0010, ВРАЩЕНИЕ ВПРАВО - 0011, ВВЕРХ - 0100, ВНИ3-0101, ВЛЕВО - 0110, ВПРАВО - 0111, ВПЕРЕД - 1000, НАЗАД - 1001, ВЫКЛЮЧЕНИЕ - 1010, ПРОДОЛЖЕНИЕ - 1111. При использовании полетных контроллеров с другой кодировкой базисных команд ее легко заменить в ПЗУ 6,7, либо перекодировать формируемые команды с помощью шифратора «на лету». Значения перечисленных команд, как упоминалось выше, задаются постоянными исходя из конкретных характеристик дрона и экспериментов. Размер адресного пространства ПЗУ 6,7 определяется исходя из количества логических переменных участвующих в представлении в виде логических формул соответствующих команд полетному контроллеру. Важно отметить, что адреса размещения указанных команд в ПЗУ 6 (табл. 3), 7 (табл. 2) соответствуют истинным значениям логических формул, соответствующих условиям их выполнения (табл. 1). В случае конфликтования команд при их размещении в ПЗУ 6, 7 по соответствующим адресам размещаются команды с более высоким приоритетом (с большим номером приоритета).
Темп формирования команд полетному контроллеру задает второй генератор импульсов 40 (например, 3500 гц). Формирование очередной команды полетному контроллеру 16 осуществляется следующим образом. Очередной сигнал с выхода генератора импульсов 40 поступает на третий вход (синхронизации) считывателя сигналов транспондера 36, третий вход (сброса) первого счетчика 38 и второй вход (сброса) второго счетчика 42. В результате по переднему фронту очередного такого сигнала сбрасываются в нулевое исходное состояние первый 38 и второй 42 счетчики, а считыватель сигналов транспондера 36 формирует последовательность высокочастотных сигналов (например, частотой 800 мгц) в которой закодирован целевой адрес полета дрона. Эти сигналы могут принимать несколько близлежащих клиентов службы доставки грузов дронами, но ответные высокочастотные сигналы в порядке обозначения своего присутствия формирует лишь транспондер-делитель пространства 29, размещенный во взлетно-посадочном гнезде 12 адресата. Одновременно транспондер-делитель пространства 29 инициирует формирование акустическими излучателями 31, 32, 33, 34 импульсов соответственно частот f11, f12, f21, f22 (например, в диапозоне 20-30 кгц) размещенных в том же взлетно-посадочном гнезде 12 и обозначающими положение в пространстве вектора курсо-глиссады. На борту дрона указанные акустические импульсы должны принимать левый 1 и правый 8 акустические датчики. Однако в зависимости от взаимного положения дрона и и взлетно-посадочного гнезда 12, а также ориентации курсо-глиссады в пространстве указанные датчики могут и не принимать, или принимать выборочно акустические сигналы. В то же время высокочастотные электромагнитные сигналы транспондера-делителя пространства 29 на борту дрона через посредство посадочного шасси-антенны 13 по первому входу считывателем сигналов транспондера 36 будут приниматься независимо от взаимного положения дрона и взлетно-посадочного гнезда 12. При приеме считывателем сигналов транспондера 36 очередного ответного сигнала на его выходе будет формироваться единичный сигнал, который поступает по вторым (S) входам к второму 35 и третьему 43 RS-триггерам и взводит их в единичное состояние. Единичные сигналы с первых (прямых) выходов второго 35 и третьего 43 RS-триггеров поступают соответственно на первый вход (разрешения счета) первого счетчика 38 и третий вход (разрешения счета) второго счетчика 42. Одновременно с выхода первого генератора импульсов 39 (например,частотой 100 мгц), который используется для оценки текущего расстояния между дроном и блоком акустических излучателей 27, импульсы поступают по второму (счетному) входу в первый счетчик 38 и по первому (счетному) входу во второй счетчик 42, и вызывают увеличение их содержимого. Этот процесс накопления продолжается до тех пор, пока с некоторой задержкой относительно ответного сигнала транспондера-делителя пространства 29 акустические импульсы излучателей 31, 32, 33, 34 не достигнут левого 1 и правого 8 акустических датчиков. Сигнал с выхода левого акустического датчика 1 поступает на вход первого формирователя 2 и входы запоминающих фильтров-формирователей сигналов f11 3 и f21 4, которые преобразуют электрические сигналы ультразвуковой частоты в видеоимпульсы. Сигнал с выхода первого формирователя 2, представляющий огибающую смеси сигналов частот f11, f12, f21, f22, поступает на первый (R) вход второго RS-триггера 35 и своим передним фронтом сбрасывает его в нулевое состояние. Тем самым по первому (прямому) выходу второго RS-триггера 35 запрещается дальнейшее нарастание содержимого первого счетчика 38, и обеспечивается единичный сигнал на первом входе логического элемента И 45 по его второму (инверсному) выходу. В результате накопленное значение первого счетчика 38 в текущем цикле работы оказывается пропорциональным текущему расстоянию между левым акустическим датчиком 1 дрона и блоком акустических излучателей 27. Одновременно сигналы с выходов запоминающих фильтров-формирователей сигналов f11 3 и f21 4, представляющие расширенные до конца текущего цикла первого генератора импульсов 39 огибающие сигналов частот соответственно f11 и f21, поступают по линиям шины первых адресных входов к ПЗУ-команд посадки 6 и ПЗУ-команд взлета 7. Одновременно, сигнал с выхода правого акустического датчика 8 поступает на вход второго формирователя 9 и входы запоминающих фильтров-формирователей сигналов f12 10 и f22 11, которые преобразуют электрические сигналы ультразвуковой частоты в видеоимпульсы. Сигнал с выхода второго формирователя 9, представляющий огибающую смеси сигналов частот f11, f12, f21, f22, поступает на первый (R) вход третьего RS-триггера 43 и своим передним фронтом сбрасывает его в нулевое состояние. Тем самым по первому (прямому) выходу третьего RS-триггера 43 запрещается дальнейшее нарастание содержимого второго счетчика 42, и обеспечивается единичный сигнал на втором входе логического элемента И 45 по его второму (инверсному) выходу. В результате накопленное значение второго счетчика 42 в текущем цикле работы оказывается пропорциональным текущему расстоянию между правым акустическим датчиком 8 дрона и блоком акустических излучателей 27. Одновременно сигналы с выходов запоминающих фильтров-формирователей сигналов f12 10 и f22 11, представляющие расширенные до конца текущего цикла первого генератора импульсов 39 огибающие сигналов частот соответственно f12 и f22, поступают по линиям шины вторых адресных входов к ПЗУ-команд посадки 6 и ПЗУ-команд взлета 7. Значение первого счетчика 38 поступает в первый компаратор 41 по его первому (информационному) входу, а значение второго счетчика 42 поступает в тот же компаратор по его второму (информационному) входу. Сигналы со вторых (инверсных) выходов второго 35 и третьего 43 RS-триггеров поступают соответственно на первый и второй входы логического элемента 45. Когда эти сигналы приобретают единичное значение, то есть когда завершается измерение расстояний от блока акустических излучателей 27 до левого 1 и правого 8 датчиков акустического излучения, на выходе логического элемента 45 формируется единичный сигнал, который запускает ждущий мультивибратор 44. Единичный импульс с (прямого) выхода ждущего мультивибратора 44, который играет роль сигнала синхронизации, поступает на третий вход (синхронизации) первого компаратора 41, вторые входы (синхронизации) второго 46 и третьего 47 компараторов и шестой вход (синхронизации команды) полетного контроллера 16. Одновременно значение второго счетчика 42 с его выхода поступает на первые (информационные) входы второго 46 и третьего 47 компараторов, а на их третьи (информационные) входы поступают соответственно код максимального установочного расстояния с первого выхода и код минимального установочного расстояния со второго выхода блока ввода установочных расстояний 48. В результате на двухразрядной шине выхода первого компаратора 41 во время действия сигнала синхронизации формируются текущие значения логических переменных L и R, характеризующих текущее азимутальное отклонение продольной оси дрона от направления на блок акустических излучателей 27, которые поступают по третьим (адресным) входам к ПЗУ - команд посадки 6 и ПЗУ- команд взлета 7. На выходе второго компаратора 46 формируется значение логической переменной U, при единичном значении характеризующей отдаление дрона при взлете на максимальное установочное расстояние от блока акустических излучателей 27. Это значение поступает на четвертый (адресный) вход ПЗУ - команд взлета 7. Наконец, на выходе третьего компаратора 47 формируется значение логической переменной N, при единичном значении характеризующей приближение дрона при посадке на минимальное установочного расстояние к блоку акустических излучателей 27. Это значение поступает на четвертый (адресный) вход ПЗУ - команд посадки 6. Кроме того, в случае выполнения транзакции посадки на шестом входе (выбора кристалла) ПЗУ - команд посадки 6 имеет место единичный сигнал, поступающий с первого выхода (разрешения посадки) полетного контроллера 16 и представляющий логическую переменную I. Если же выполняется транзакция взлета, то единичный сигнал, представляющий логическую переменную О, имеет место на пятом входе (выбора кристалла) ПЗУ-команд взлета 7 со второго выхода (разрешения взлета) полетного контроллера 16. В совокупности конкретные значения на всех адресных входах определяют конкретный адрес ячейки активного (6 или 7) в данной транзакции ПЗУ. С шины выхода данного ПЗУ содержимое указанной ячейки, представляющее текущую команду управления полетным контроллером 16, поступает для исполнения по шине седьмого входа в полетный контроллер 16 и воспринимается им во время действия сигнала синхронизации на его шестому входу.
Например, в случае выполнения транзакции взлета дрона и возникновении в текущем цикле формирования команд полетному контроллеру 16 ситуации {L=0, R=0, U=0, Н11=1, H12=1, H21=1, H22=1}, что соответствует адресу выбранной в ПЗУ-команд взлета 7 ячейки LRUH11H12H21H22=0001111, для полетного контроллера 16 из указанного ПЗУ будет прочитана команда (1001,значение), т.е. команда движения НАЗАД (задним ходом) с указанной в команде постоянной скоростью (табл. 2). Это решение подтверждается табл. 1, в которой в данной ситуации значение ИСТИНА принимает лишь логическое выражение iOlruH11H12H12H22=111111111=1, соответствующее команде движения назад. В другом примере при выполнении транзакции посадки дрона и возникновении в текущем цикле формирования команд полетному контроллеру 16 ситуации {I=1, О=0, L=0, R=0, N=0, Р=0, Н11=1, Н12=1, H21=0, Н22=0}, что соответствует адресу выбранной в ПЗУ-команд посадки 6 ячейки LRNPH11H12H21H22=00001100, для полетного контроллера 16 из указанного ПЗУ будет прочитана команда (0101, значение), т.е. движение ВНИЗ с указанной в команде постоянной скоростью (табл. 3). Это решение подтверждается табл. 1, где значение ИСТИНА приобретает лишь логическая формула Iolr(h21h22VN)=1111(11V0)=1, предписывающая дрону также движение ВНИЗ. Следует отметить, что в последнем примере, поскольку N=0 дрон еще не приблизился к взлетно-посадочному гнезду на минимально допустимое расстояние. Если же дрон приблизится на такое расстояние, то сформируется значение N=1 и логическая формула Iolr(h21h22VN) будет принимать значение ИСТИНА независимо от значений переменных Н11, Н12, Н21, Н22 и по всем адресам LRNPXXXX(гдe X означает любое значение 0 или 1), например по адресу 00100000, в ПЗУ - команд посадки 6 для полетного контроллера также будет прочитана команда движение ВНИЗ (табл. 3). Причем движение дрона ВНИЗ в этом случае с целью достижения абсолютной точности посадки дрона на посадочную крестовину 25 взлетно-посадочного гнезда 12 будет сопровождаться механической коррекцией траектории его спуска. При этом горизонтальные взаимноортогональные силы, центрирующие дрон, возникают за счет противодействия ветвей посадочной крестовины 25 силам давления боковых частей  посадочного шасси-антенны 13 во время их физических контактов при снижении дрона. Когда ветви посадочной крестовины 25 в результате снижения дрона достигают вершин пазов посадочного шасси-антенны 13 дрона срабатывает датчик завершения посадки 5 (например, кнопочный выключатель) с формированием единичного сигнала на своем выходе. Этот сигнал поступает по пятому адресному входу к ПЗУ - команд посадки 6 и по первому (S) входу первого RS-триггера 22. При этом в ПЗУ-команд посадки 6 по адресу LRNPH11H12H21H22=00010011 для полетного контроллера 16 читается команда (1010, значение), предписывающая ему выключение двигателей дрона. В табл. 1 это решение соответствует значению ИСТИНА логического выражения IоР=1. Одновременно первый RS-триггер 22 взводится в единичное состояние и с его первого (прямого) выхода единичный сигнал поступает на вход фиксатора дрона в гнезде 21 (например, соленоида), срабатывание которого обеспечивает устойчивое к ветровым порывам разъемное треугольное шлицевое соединение дрона с посадочной крестовиной 25 взлетно-посадочного гнезда 12. В это же время нулевой сигнал со второго (инверсного) выхода первого RS-триггера 22 поступает на вход фиксатора груза 23 (например, соленоида), срабатывание которого обеспечивает освобождение груза от фиксации в теле дрона.
посадочного шасси-антенны 13 во время их физических контактов при снижении дрона. Когда ветви посадочной крестовины 25 в результате снижения дрона достигают вершин пазов посадочного шасси-антенны 13 дрона срабатывает датчик завершения посадки 5 (например, кнопочный выключатель) с формированием единичного сигнала на своем выходе. Этот сигнал поступает по пятому адресному входу к ПЗУ - команд посадки 6 и по первому (S) входу первого RS-триггера 22. При этом в ПЗУ-команд посадки 6 по адресу LRNPH11H12H21H22=00010011 для полетного контроллера 16 читается команда (1010, значение), предписывающая ему выключение двигателей дрона. В табл. 1 это решение соответствует значению ИСТИНА логического выражения IоР=1. Одновременно первый RS-триггер 22 взводится в единичное состояние и с его первого (прямого) выхода единичный сигнал поступает на вход фиксатора дрона в гнезде 21 (например, соленоида), срабатывание которого обеспечивает устойчивое к ветровым порывам разъемное треугольное шлицевое соединение дрона с посадочной крестовиной 25 взлетно-посадочного гнезда 12. В это же время нулевой сигнал со второго (инверсного) выхода первого RS-триггера 22 поступает на вход фиксатора груза 23 (например, соленоида), срабатывание которого обеспечивает освобождение груза от фиксации в теле дрона.
Дополнительными достоинствами заявляемого способа и системы являются:
1. Простота реализации, которая достигается за счет использования ситуационного принципа управления дроном при взлете-посадке в отличие от аналогов, которые величины управляющих воздействий определяют путем сложных вычислений на основе предварительного определения величин отклонений реальной траектории дрона от планируемой.
2. Абсолютная точность позиционирования дрона во взлетно-посадочном гнезде в результате его посадки позволяет легко автоматизировать процесс подзарядки аккумуляторов дрона во взлетно-посадочном гнезде, позволяет отказаться от посадочной площадки, которая может затенять помещения дома и портить его внешний вид, а также позволяет легко автоматизировать фиксацию доставленного дроном груза на специальном поддоне и реализовать обратный забор груза, например, при отправлении для лабораторного исследования медицинских анализов или результатов надомного труда для доставки заказчику. Все это также расширяет сферу использования дронов по доставке грузов.
3. Изобретение может быть использовано не только при доставке грузов в городских условиях, но и в других случаях наличия ограничений на траектории взлета и посадки, например на судах для автоматических разведывательных и ударных дронов.
Дополнительное к полетному контроллеру 16 бортовое оборудование по данному изобретению может быть частично реализовано в виде дополнительного программного обеспечения к полетному контроллеру, но это уже будет проектированием, а не изобретательством.
Использованная литература:
1. Полетный контроллер ArduPilot Mega (АРМ) 2.6 [http://ardupilot-mega.ru, опубл. 1.02.2015].
2. Система навигации ближнего поля (патент на изобретение RU 2602833, МПК: G01C 21/00, опубл. 19.11.2016).
3. Дшхунян В.Л. Электронная идентификация. Бесконтактные электронные идентификаторы смарт-карты / В.Л. Дшхунян, В.Ф. Шаньгин. - М.: ООО »Издательство АСТ»: Издательство «НТ Пресс», 2004. - 695.
4. Квадрокоптер дополненной реальности - обзор AR.Drone 2.0 [https://habr.com/post/160251/, опубл. 29.11.2012].
5. AR.Swift-разбираемся в АПИ Ar.Drone 2.0 [http://robocraft.ru/blog/3087.html, опубл. 6.05.2014].
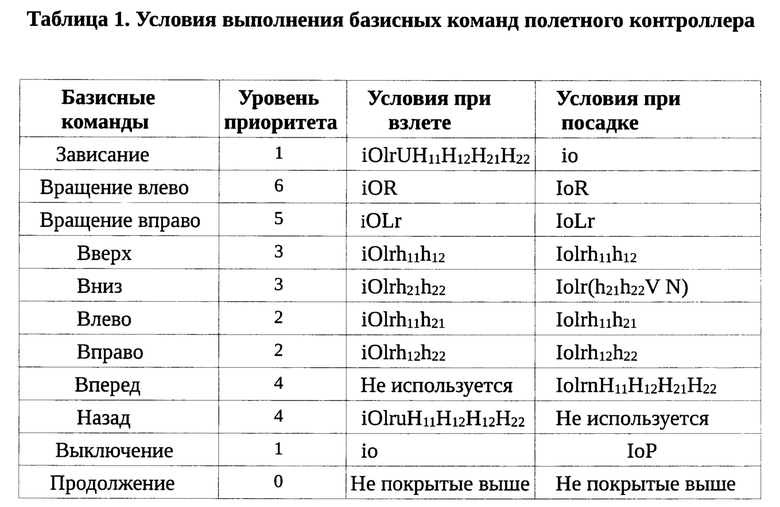
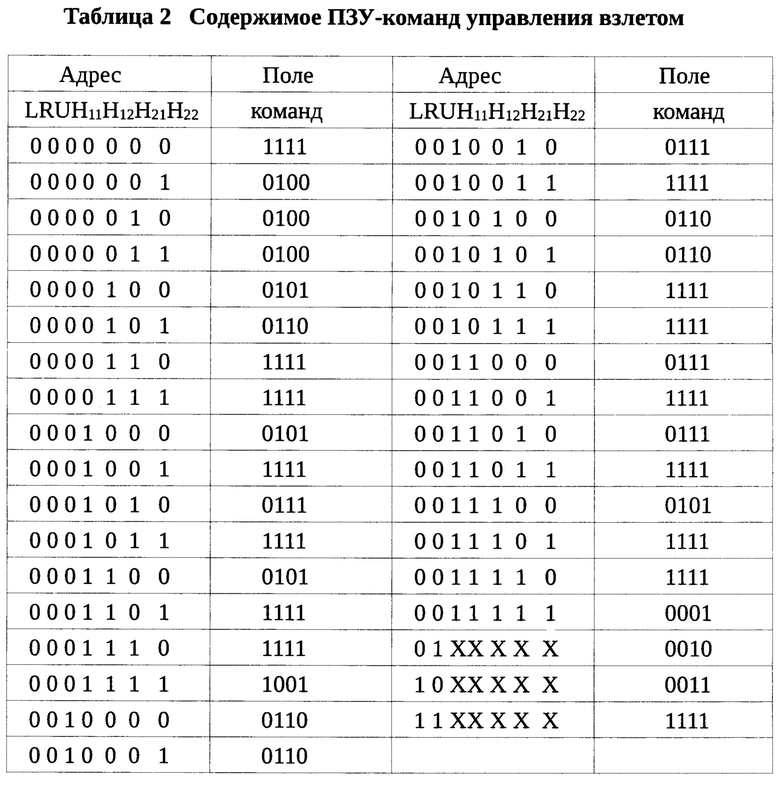
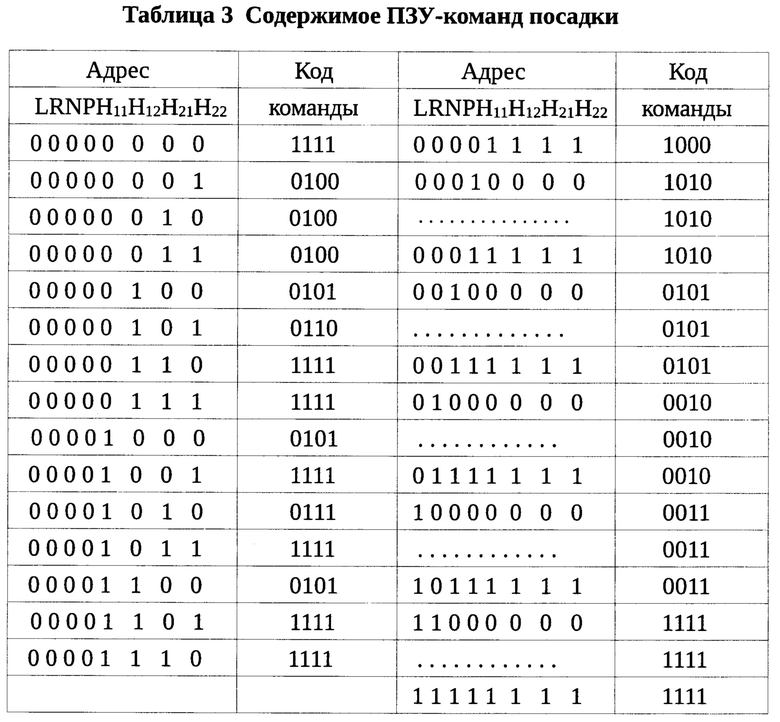
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ БЕСПИЛОТНИКОМ | 2020 |
|
RU2770251C1 |
| СПОСОБ ДЛЯ ИЗМЕРЕНИЯ ХАРАКТЕРИСТИК РЕЗОНАНСНЫХ СТРУКТУР И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2013 |
|
RU2550593C1 |
| Система доставки груза на место проведения горнодобывающим субъектом взрывных работ (варианты) | 2024 |
|
RU2840365C1 |
| Система доставки груза горнодобывающим субъектом на место проведения взрывных работ (варианты) | 2024 |
|
RU2839710C1 |
| СПОСОБ И КОМПЛЕКСНАЯ АВТОМАТИЗИРОВАННАЯ СИСТЕМА УПРАВЛЕНИЯ АВИАЦИОННЫМИ СИСТЕМАМИ НАБЛЮДЕНИЯ И НАВИГАЦИИ | 2020 |
|
RU2799550C1 |
| СПОСОБ КОДИРОВАНИЯ ЭЛЕКТРОМАГНИТНОГО ИЗЛУЧЕНИЯ И УСТРОЙСТВО КОДИРОВАНИЯ ЭЛЕКТРОМАГНИТНОГО ИЗЛУЧЕНИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2234795C2 |
| СПОСОБ ДЕКОДИРОВАНИЯ СИГНАЛА И УСТРОЙСТВО ИЗМЕРЕНИЯ КООРДИНАТ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2228574C2 |
| СПОСОБ ДЕКОДИРОВАНИЯ СИГНАЛА И УСТРОЙСТВО ДЕКОДИРОВАНИЯ | 2004 |
|
RU2280324C1 |
| МИКРОКОМПЬЮТЕР И СПОСОБ ЕГО ТЕСТИРОВАНИЯ | 2006 |
|
RU2374679C2 |
| Система автоматической дозаправки беспилотного летательного аппарата | 2020 |
|
RU2757400C1 |
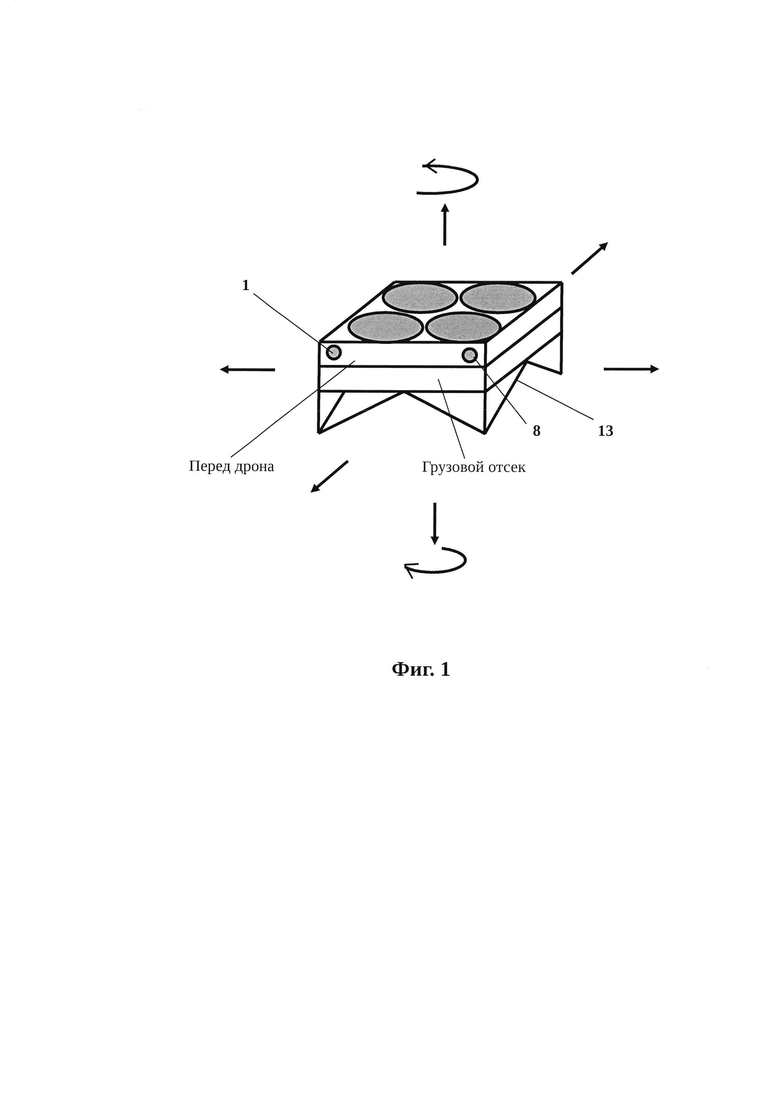
Группа изобретений относится к способу и системе автоматического управления дроном.
Для автоматического управления дроном с его борта излучают импульсы переменного высокочастотного излучения с закодированным адресом доставки груза, в возможных местах посадки их принимают, декодируют, при совпадении адреса формируют ответные сигналы, по каждому ответному сигналу формируют импульс ультразвукового излучения, определяющий положение нужной курсо-глиссады, по принятым акустическим импульсам производят управление дроном определенным образом, а при посадке дрона при получении сообщения о завершении посадки выключают двигатели дрона, прикрепляют его к взлетно-посадочному гнезду и отцепляют поддон с доставляемым грузом. Система содержит расположенные на борту дрона полетный контроллер, спутниковую систему навигации, гироскоп, акселерометр, магнитометр, барометр, два акустических датчика, фильтры-формирователи сигналов, постоянное запоминающее устройство команд взлета (ПЗУ) и ПЗУ команд посадки, датчик завершения посадки, определитель азимутального отклонения, посадочную шасси-антенну, фиксатор дрона в гнезде, фиксатор груза, три RS–риггера, а у адресата доставки установлено взлетно-посадочное гнездо. Обеспечивается точность управления, взлета и посадки дрона при доставке грузов в городских условиях. 2 н. и 4 з.п. ф-лы, 5 ил., 3 табл.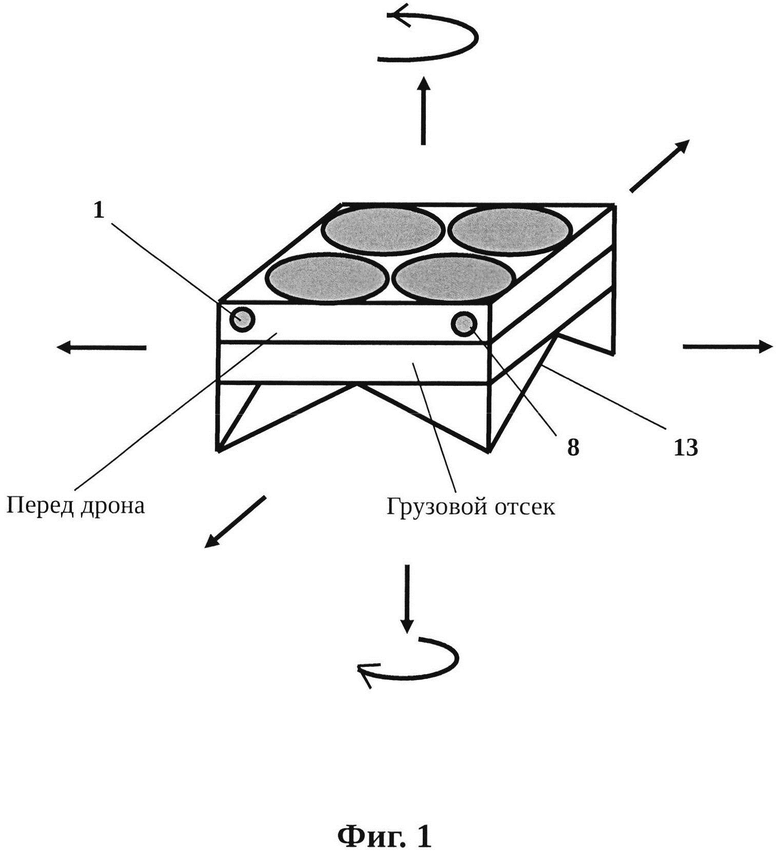
1. Способ автоматического управления дроном, содержащий операцию коррекции траектории посадки дрона, отличающийся тем, что в нем дополнительно используют следующие операции:
- при взлете и посадке с борта дрона излучают в близлежащее окружающее пространство импульсы переменного высокочастотного излучения, в которых закодирован адрес доставки груза;
- при взлете и посадке во всех потенциально возможных местах посадки дрона, попавших в зону высочастотного облучения, принимают и декодируют указанное излучение, однако импульсы ответного высокочастотного излучения формируют лишь с места, соответствующего адресу доставки груза;
- при взлете и посадке по каждому ответному сигналу с места доставки груза в объеме высокочастотного облучения формируют импульс ультразвукового излучения, определяющий положение нужной курсо-глиссады взлета-посадки дрона в пространстве, посредством заполнения при взгляде в направлении курсо-глиссады в место посадки левого верхнего квадранта пространства излучением частоты f11, нижнего левого квадранта излучением частоты f21, правого верхнего квадранта излучением частоты f12, и правого нижнего квадранта излучением частоты f22;
- при взлете и посадке при отсутствии приема акустических импульсов в левой или в правой фронтальных частях дрона, или при его левом азимутальном отклонении более установочного значения осуществляют с постоянной скоростью левое вращение (против часовой стрелки) дрона до достижения устойчивого приема акустических импульсов в указанных местах;
- при взлете и посадке по времени запаздывания прихода акустических импульсов к фронтальной части дрона относительно соответствующих зондирующих высокочастотных сигналов с борта дрона определяют его расстояние до источника акустического излучения, а по временной разнице прихода акустического импульса к левой и правой частях фронтальной части дрона определяют степень азимутального отклонения продольной оси дрона от источника акустического излучения;
- при взлете и посадке при наличии азимутального отклонения дрона от источника акустического излучения более установочного значения дрон с постоянной скоростью вращают в сторону, противоположную отклонению, до его исключения;
- при взлете и посадке при азимутальном отклонении дрона от источника акустического излучения не более установочного значения и отсутствии приема на борту дрона акустических излучений частот f21 и f22 дрон с постоянной скоростью снижают до нарушения условий перемещения дрона вниз;
- при взлете и посадке при азимутальном отклонении дрона от источника акустического излучения не более установочного значения и отсутствии приема на борту дрона акустических излучений частот f11 и f12 дрон отцепляют (если он прикреплен) от взлетно-посадочного гнезда и с постоянной скоростью поднимают до нарушения условий перемещения дрона вверх;
- при взлете и посадке при азимутальном отклонении дрона от источника акустического излучения не более установочного значения и отсутствии приема на борту дрона акустических излучений частот f12 и f22 дрон с постоянной скоростью перемещают вправо до нарушения условий перемещения дрона вправо;
- при взлете и посадке при азимутальном отклонении дрона от источника акустического излучения не более установочного значения и отсутствии приема на борту дрона акустических излучений частотой f11 и f21 дрон с постоянной скоростью перемещают влево до нарушения условий перемещения дрона влево;
- при взлете дрона при азимутальном отклонении дрона от источника акустического излучения не более установочного значения и приеме на борту дрона акустического излучения одновременно частот f11, f21, и f22, а также отдалении дрона от источника акустических импульсов менее максимального установочного расстояния дрон с постоянной скоростью смещают назад (задним ходом) до нарушения условий перемещения дрона назад;
- при взлете дрона в случае отсутствия азимутального отклонения дрона от источника акустического излучения более заранее декларируемой величины и приеме на борту дрона акустического излучения одновременно частот f11, f12, f21 и f22, а также отдалении дрона от источника акустических импульсов на максимальное установочное расстояние обеспечивают зависание дрона, считая взлет завершенным, и передают управление полетному контроллеру;
- при посадке дрона при азимутальном отклонении дрона от источника акустического излучения не более заранее декларируемой величины и приеме на борту дрона акустического излучения частот f11, f12, f21 и f22, а также удалении дрона от источника акустических импульсов более минимального установочного расстояния его с постоянной скоростью смещают вперед до нарушения условий перемещения дрона вперед;
- при посадке дрона при азимутальном отклонении дрона от источника акустического излучения не более установочного значения и приеме на борту дрона акустического излучения одновременно частот f11, f12, f21 и f22, а также приближения дрона к источнику акустических импульсов на минимальное установочное расстояние его с постоянной скоростью снижают до приобретения устойчивого физического контакта с взлетно-посадочным гнездом;
- при посадке дрона при получении сообщения о завершении посадки выключают двигатели дрона, прикрепляют его к взлетно-посадочному гнезду и отцепляют поддон с доставляемым грузом;
- при возникновении комплексов условий, не соответствующих ни одной из описанных выше ситуаций продолжают выполнение последней выбранной операции;
причем коррекцию траектории посадки дрона в последней операции посадки относительно взлетно-посадочного гнезда выполняют механическим образом посредством самоцентрирующегося шлицевого соединения дрона с взлетно-посадочным гнездом с замыканием соединения под действием силы тяжести дрона.
2. Система автоматического управления дроном, содержащая на борту дрона полетный контроллер, первый, второй, третий, четвертый и пятый входы которого связаны с выходами, соответственно, спутниковой системы навигации, гироскопа, акселерометра, магнитометра и барометра, отличающаяся тем, что в нее дополнительно введены
на борту дрона:
левый акустический датчик, первый формирователь, запоминающий фильтр-формирователь сигналов f11, запоминающий фильтр-формирователь сигналов f21, постоянное запоминающее устройство (ПЗУ) команд взлета, правый акустический датчик, второй формирователь, запоминающий фильтр-формирователь сигналов f12, запоминающий фильтр-формирователь сигналов f22, ПЗУ команд посадки, датчик завершения посадки, определитель азимутального отклонения, посадочное шасси-антенна, фиксатор дрона в гнезде, первый RS-триггер, фиксатор груза,
причем выход левого акустического датчика связан с входом первого формирователя и входами запоминающих фильтров-формирователей сигналов f11 и f21, выход первого формирователя соединен с первым входом определителя азимутального рассогласования, выходы запоминающих фильтров-формирователей сигналов f11 и f21 связаны с первыми входами ПЗУ-команд взлета и ПЗУ-команд посадки, выход правого акустического датчика связан с входом второго формирователя и входами запоминающих фильтров-формирователей сигналов f12 и f22, выход второго формирователя соединен со вторым входом определителя азимутального отклонения, выходы запоминающих фильтров-формирователей сигналов f12 и f22 связаны со вторыми входами ПЗУ-команд взлета и ПЗУ-команд посадки, шина первого выхода определителя азимутального отклонения связана с третьими входами ПЗУ-команд взлета и ПЗУ-команд посадки, второй и третий выходы определителя азимутального отклонения соединены соответственно с четвертыми входами ПЗУ-команд посадки и ПЗУ-команд взлета, четвертый выход определителя азимутального отклонения соединен с шестым входом полетного контроллера, выход датчика завершения посадки связан с пятым входом ПЗУ-команд посадки и первым входом первого RS-триггера, первый выход полетного контроллера связан с шестым входом ПЗУ-команд посадки, второй выход полетного контроллера связан с пятым входом ПЗУ-команд взлета и вторым входом первого RS-триггера, четвертый выход определителя азимутального отклонения соединен с шестым входом полетного контроллера, седьмой вход которого связан с выходами ПЗУ-команд взлета и ПЗУ-команд посадки, выход посадочного шасси-антенны связан с третьим входом определителя азимутального отклонения, первый выход первого RS-триггера связан входом фиксатора дрона в гнезде, второй выход первого RS-триггера соединен с входом фиксатора груза, пятый выход определителя азимутального отклонения соединен с восьмым входом полетного контроллера, а у адресата доставки груза дополнительно устанавливают взлетно-посадочное гнездо,
причем левый и правый акустические датчики размещены по краям фронтальной части дрона симметрично относительно его продольной оси и имеют диаграмму направленности приема, совпадающую с передней полусферой относительно корпуса дрона,
причем приемно-передающая посадочная шасси-антенна дрона имеет полносферическую диаграмму направленности.
3. Система автоматического управления дроном по п. 2, отличающаяся тем, что посадочное шасси-антенна дрона выполнено из трубчатого металла с гладкой внешней поверхностью, квадратным в плане, по размеру нижней части каркаса дрона, с Λ-образными по форме сторонами.
4. Система автоматического управления дроном по п. 2, отличающаяся тем, что определитель азимутального отклонения включает в себя:
второй RS-триггер, считыватель сигнала транспондера, блок ввода адреса доставки, первый счетчик, первый генератор импульсов, второй генератор импульсов, первый компаратор, второй счетчик, третий RS-триггер, ждущий мультивибратор, логический элемент И, второй компаратор, третий компаратор, блок ввода установочных расстояний,
причем в определителе азимутального отклонения его первый, второй и третий входы представлены в нем первыми входами соответственно второго RS-триггера, третьего RS-триггера и считывателя сигнала транспондера, шина первого выхода определителя азимутального отклонения представлена шиной выхода первого компаратора, второй, третий и четвертый выходы определителя азимутального отклонения представлены соответственно выходом третьего компаратора, выходом второго компаратора и выходом ждущего мультивибратора, пятый выход определителя азимутального отклонения представлен выходом блока ввода адреса доставки, который также связан со вторым входом считывателя сигналов транспондера, выход которого связан со вторыми входами второго и третьего RS-триггеров, первый и второй выходы второго RS-триггера соединены соответственно с первыми входами первого счетчика и логического элемента И, выход первого генератора импульсов связан со вторым входом первого счетчика и первым входом второго счетчика, выход второго генератора импульсов связан с третьим входом считывателя сигналов транспондера, третьим входом первого счетчика и вторым входом второго счетчика, первый и второй выходы третьего RS-триггера соединены соответственно с третьим входом второго счетчика и вторым входом логического элемента И, выход первого счетчика связан с первым входом первого компаратора, выход второго счетчика связан со вторым входом первого компаратора и первыми входами второго и третьего компараторов, выход логического элемента И соединен с входом ждущего мультивибратора, выход которого связан с третьим входом первого компаратора и вторыми входами второго и третьего компараторов, первый и второй выходы блока ввода установочных расстояний связаны с третьими входами соответственно второго и третьего компараторов.
5. Система автоматического управления дроном по п. 2, отличающаяся тем, что взлетно-посадочное гнездо включает в себя:
двухстворчатую опорную раму, фиксатор положения поворотной части опорной рамы, посадочную крестовину, одностепенной шарнир, фиксатор положения одностепенного шарнира, транспондер, блок акустических излучателей,
причем двухстворчатая опорная рама одной створкой прикреплена к правому или левому вертикальному левому или правому откосу окна адресата, а в нижней части другой подвижной створки прикреплена в горизонтальном положении посадочная крестовина, а в верхней части подвижной створки опорной рамы прикреплен одностепенной шарнир с прикрепленными на нем рядом транспондером и блоком акустических излучателей, на петлях стыка двухстворчатой опорной рамы установлен фиксатор положения подвижной створки, на одностепенном шарнире установлен фиксатор его положения,
причем посадочная крестовина выполнена прямоугольной с размахом не менее ширины посадочного шасси-антенны дрона, увеличенной на величину удвоенного максимального отклонения дрона при посадке, а ветви посадочной крестовины выполнены в виде трубчатых подшипников.
6. Система автоматического управления дроном по п. 2, отличающаяся тем, что блок акустических излучателей включает в себя:
акустический излучатель частоты f11, акустический излучатель частоты f12, акустический излучатель частоты f21, акустический излучатель частоты f22, транспондер-делитель пространства излучений, выход которого связан с входами всех излучателей блока акустических излучателей,
причем корпус транспондера-делителя пространства излучений выполнен в виде профиля крестообразной формы, в углы которого помещены одинаково направленные в сторону открытого пространства перечисленные выше акустические излучатели,
причем диаграммы направленности приема-излучения электромагнитного излучения транспондера-делителя пространства излучений и диаграммы направленности акустических излучателей являются полусферическими, а корпус транспондера обеспечивает ограничение акустического излучения каждой из частот f11, f21, f12, f22 своей четвертью полусферы.
| Многопильный станок для изготовления тарной дощечки, штукатурной дранки и т.п. | 1956 |
|
SU106971A1 |
| СИСТЕМА УДАЛЁННОГО НАБЛЮДЕНИЯ И УПРАВЛЕНИЯ БЕСПИЛОТНЫМИ ЛЕТАТЕЛЬНЫМИ АППАРАТАМИ | 2016 |
|
RU2657164C1 |
| Способ выполнения работ, связанных с доставкой | 2016 |
|
RU2651782C1 |
| US 20150323932 A1, 12.11.2015 | |||
| US 10082803 B2, 25.09.2018. | |||

