Изобретение относится к винтокрылым беспилотным летательным аппаратам (БПЛА) с двумя и более винтами, а именно к винтокрылым БПЛА с управляемым шасси, а также способу управления процессом посадки.
За последние два десятилетние развитие беспилотных летательных аппаратов в мире вышло на принципиально новый уровень. Не смотря на известность отдельных решений еще с первой половины двадцатого века, настоящий прорыв в области производства и применения беспилотных аппаратов случился благодаря развитию микроэлектроники и систем связи, а также благодаря революционным достижениям в области материаловедения, которые позволили облегчить конструкции аппаратов. Сочетание этих факторов позволило реализовать и достаточно быстро популяризировать во второй половине 2000-х годов направление «коптеров», то есть винтокрылых аппаратов с различными вариантами схем по количеству осей. После появления на рынке линейки аппаратов компании MikroKopter, направление стало стремительно развиваться, став параллельной ветвью развития беспилотных аппаратов относительно аппаратов самолетного типа.
Из уровня техники известно множество дронов (БПЛА типа коптеров), область применения таких аппаратов достаточно широка. Это могут быть задачи связанные с наблюдением и мониторингом. Произведением замеров, переноске грузов, видео фиксации и т.д. Традиционно, подобные типы аппаратов являются дистанционно пилотируемыми. Оператор управляет с земли или вносит изменения в заранее заданный маршрут [Беспилотный летательный аппарат (бпла), классификация, Каршов Р.С., ПРОБЛЕМЫ СОВРЕМЕННОЙ НАУКИ И ОБРАЗОВАНИЯ, номер: 11 (53), год: 2016, страницы: 38-40].
Существуют решения, в которых в состоянии покоя при статичном размещении предполагается размещение винтокрылых БПЛА на специальных стойках, либо размещение на поверхности на неподвижных шасси, либо на корпусе / фюзеляже (без опор, шасси и т.п.), либо опоры интегрированы в «крылья» и прочие решения. А также известны технические решения, в которых подобные БПЛА оснащены подвижным шасси. На рынке, к примеру, широкое распространение получили решения типа Yuneec Typhoon Н PRO, инструкция по эксплуатации которого содержит подробное описание системы поднимаемого шасси и дистанционного управления таковым. Приведенный пример относится к гексакоптерам, однако известны решения, относящиеся и трикоптерам, и к квадрокоптерам. Устройство шасси подобного типа для винтокрылых БПЛА описано и в раде патентных источниках информации: например, [CN 108128443 A 08.06.2018], где описано ударостойкое быстросъемное электрическое убирающееся шасси, которое содержит основной корпус шасси и опору шасси, основной корпус содержит опорную стойку, механизм выдвижения-убирания, опорный каркас ножной рамы и две Г-образные боковые пластины; механизм выдвижения-убирания содержит двигатель, двухходовой винт, верхнюю крышку и нижнюю крышку; верхняя крышка крепится к верхней части нижней крышки; направляющие образованы на передней и задней сторонах нижней крышки, а скользящие блоки установлены с возможностью скольжения в по направляющим; двигатель неподвижно закреплен в нижней крышке, двухходовой винт соединен с выходным валом двигателя, а передняя гайка и реверсивная гайка соединены с передней резьбой и обратной резьбой двухходового винтового стержня соответственно. Шасси характеризуется ударопрочностью, небольшим весом, низкой стоимостью, удобством обслуживания и отсутствием зазоров.
Известно решение согласно полезной модели [CN 203638089 U 11.06.2016]. Убирающееся шасси используется для беспилотного летательного аппарата и содержит опорную раму и опорную стойку, при этом опорная стойка соединена с первым концом опорной рамы с возможностью вращения, П-образный шатун и приводной шатун также расположены между опорной рамой и опорной стойкой в виде звена, опорная рама неподвижно снабжена приводным рулевым двигателем, приводной рулевой двигатель соединен с приводным шатуном и приводит приводной шатун в поворот, а приводные качания шатуна, чтобы заставить U-образный шатун двигаться вверх и вниз, чтобы дополнительно толкать и тянуть опорную ногу. Опорную стойку можно опустить и сложить, опорную стойку можно контролировать для складывания в процессе аэрофотосъемки, убранное шасси больше не мешает камере, и камера может плавно делать снимок на 360 градусов.
Из уровня техники известны и иные решения, связанные с убирающимися шасси БПЛА. Например, [CN 109606652 A 12.04.2019], где описан БПЛА, который содержит корпус БПЛА и механизм шасси, при этом механизм шасси установлен на корпусе БПЛА. Самоуправляемый БПЛА реализует функцию, заключающуюся в том, что шасси БПЛА может быть убрано с помощью ряда механических трансмиссий, что позволяет избежать чрезмерного энергопотребления БПЛА, а общая дальность полета сокращается из-за ненужного сопротивления шасси во время полета. БПЛА, улучшает эффективность использования БПЛА, снижает общий вес БПЛА по сравнению с существующим БПЛА, имеющим убирающееся шасси, а также снижает затраты на использование БПЛА; передняя стойка шасси БПЛА, разработанная в соответствии с изобретением, может выполнять функцию рулевого управления посредством автоматического управления; когда БПЛА улетает, БПЛА можно напрямую управлять возвратом с помощью пульта дистанционного управления без ручного прохода и управления, когда БПЛА скользит по земле на этапе подготовки земли.
Или же известное из уровня техники решение [US 2018186472 A1 05.07.2019]: в данном случае убирающееся шасси призвано обеспечить максимальный угол обзора для подвесной камеры. Система камер состоит из пары камер с парой широкоугольных объективов, которые имеют общий угол обзора, равный или превышающий 360 градусов, и, как таковые, объективы могут захватывать изображения всего 360-градусного сферического пространства, окружающего объект, устройства, за исключением исключительной области, определяемой радиусом перекрытия. Платформа БПЛА содержит корпус симметричного вида и убирающееся шасси, которое может убираться внутрь корпуса во время полета и выдвигаться при посадке.
Однако, необходимо отметить, что данные, весьма распространенные решения, не могут являться в полной мере универсальными для всех типов винтокрылых БПЛА. В частности, для аппаратов с «Y» расположением осей, в которых не реализуется принцип симметричного исполнения конструкции относительно нескольких осей симметрии, соответствующих осям расположения винтов - подобные аппараты, как правило, либо являются более крупными, тяжеловесными или грузоподъемными, либо имеют более высокую скорость передвижения и стабильность полета, либо обладают обеими этими характеристиками, и характеризуются одной продольной осью симметрии в конструктивном исполнении и аналогичны по многим параметрам и принципам работы и управления и по аэродинамической картине полета крупным пилотируемым аппаратам - вертолетам и винтокрылым машинам. Помимо этого, очевиден и другой недостаток подобных конструкций - данная форма и габариты шасси исключают возможности интеграции в шасси каких-либо приборов без конструктивных изменений и изменений массо-габаритных характеристик.
Помимо раскрытой в уровне техники информации, необходимо обратить внимание на то, что для многих летательных аппаратов характерно применение автоматизированных систем, в частности, связанных с процессом посадки.
Например, способ автоматической посадки беспилотного летательного аппарата для мониторинга протяженных объектов [RU 2503936, 10.01.2014]. Изобретение относится к области применения БПЛА, в нем раскрывается способ автоматической посадки БПЛА, который включает измерение высоты полета Н, горизонтальной дальности до расчетной точки касания D, отклонения от вертикальной плоскости, проходящей через ось взлетно-посадочной полосы ΔZ, определении трех составляющих скорости и ускорения в расчетной точке касания, формирование опорной траектории снижения H0(D,D0) и Z0(D,D0) из точки начала снижения, находящейся на расстоянии D0 от расчетной точки касания, определение отклонения БПЛА от опорной траектории снижения Δh=H-H0(D,D0) и ΔZ=Z-Z0(D,D0), формирование управляющих сигналов по результатам измерений и подачу их на исполнительные механизмы рулей БПЛА. В каждой точке траектории задают контрольный створ траектории снижения БПЛА в виде круга, лежащего на плоскости, перпендикулярной линии опорной траектории, и с центром, лежащим на линии опорной траектории снижения. При выходе БПЛА за область контрольного створа формируют новую опорную траекторию снижения. Повышается надежность работы и безопасность полетов БПЛА.
Решение согласно [RU 2539703, 27.01.2015] относится к области способов посадки беспилотных летательных аппаратов (БЛА) и может быть использовано при решении задачи обеспечения точной автоматической посадки БЛА самолетной конструкции на площадку малых размеров. В способе выполняют посадку БЛА в улавливающую сеть, причем формируют круговую зону захода на посадку, для чего в заданной точке посадки устанавливают ненаправленный источник радиоизлучения, а на борту БЛА устанавливают радиопеленгатор, выполняют автономный ввод БЛА в зону захода на посадку, используя штатное бортовое навигационное оборудование, производят прием сигналов ненаправленного источника радиоизлучения и выполняют его угловое сопровождение в горизонтальной и вертикальной плоскостях бортовым радиопеленгатором, по данным которого с помощью бортовой системы управления формируют команды самонаведения БЛА на источник радиоизлучения в горизонтальной плоскости. Одновременно выполняют самонаведение БЛА на источник радиоизлучения в горизонтальной плоскости и полет БЛА на заданной высоте, по достижении заданного угла визирования источника радиоизлучения в вертикальной плоскости переводят БЛА в пикирование, по данным бортового радиопеленгатора с помощью бортовой системы управления формируют команды самонаведения БЛА на источник радиоизлучения в вертикальной плоскости, выполняют самонаведение БЛА на источник радиоизлучения в вертикальной и горизонтальной плоскостях до попадания в улавливающую сеть, установленную горизонтально над источником радиоизлучения. Достигается увеличение автономности выполнения точной посадки БЛА.
Способ автоматической посадки летательного аппарата в сложных метеорологических условиях, в том числе беспилотного, согласно [RU 2585197, 27.05.2016] также относится к способам автоматической посадки летательного аппарата (ЛА), без акцента на принадлежность к БПЛА, однако способный применяться для некоторых видов БПЛА: для автоматической посадки ЛА в сложных метеорологических условиях задают горизонтальную дальность от начальной точки траектории снижения до ее конечной точки, параметры движения ЛА в конечной точке траектории снижения, измеряют скорость и высоту полета, горизонтальную дальность до конечной точки траектории снижения, отклонение от вертикальной плоскости осевой линии взлетно-посадочной полосы, вертикальную составляющую скорости полета, производят определение углов тангажа, крена и вертикальной составляющей скорости ЛА определенным образом, в зависимости от разности расстояний, определяемых по времени распространения сигналов от расположенных определенным образом приемопередатчиков через определенный интервал времени, подают команды на органы управления ЛА в случае отклонения значения, полученного путем сравнения последующих и предыдущих расчетных данных по вертикальной составляющей скорости ЛА. Обеспечивается безопасность посадки ЛА в сложных метеорологических условиях.
Помимо уже описанных типичных для известного уровня техники недостатков, необходимо отметить проблематику текущего уровня техники связанную с пространственным положением выносных устройств связи или позиционирования, в частности - передающих антенн. При оснащении таким оборудованием путем интеграции в корпус, существует вероятность ухудшения сигнала, а при выносном расположении - вероятность повреждения антенн или нарушения режима полета вплоть до падения аппарата при задевании за внешние предметы - ветви деревьев, конструкции инженерных сооружений и пр., особенно при необходимости захода аппарата в помещения, в салон транспортного средства, на судно и т.п.
Учитывая приведенную ранее проблематику, характерную для известного уровня техники касательно невозможности использовать распространенные системы убираемых шасси для отдельных типов винтокрылых БПЛА, обращая внимание на возможность автоматизации отдельных элементов процесса управления посадкой, очевидна проблема, связанная с необходимостью разработки устойчивых убираемых шасси с возможностью интеграции передающего оборудования связи в конструкцию шасси и определенной системы осуществления посадки.
Техническим результатом изобретения является создание конструкции и способа работы поднимаемого шасси для винтокрылых БПЛА. Дополнительным техническим результатом является повышение автоматизации и автономности процесса посадки БПЛА. Еще одним дополнительным техническим результатом является повышение защиты от повреждений выносного антенного оборудования.
Технический результат достигается конструкцией беспилотного летательного аппарата вертолетного типа, который содержит три винта, корпус и интегрированную в корпус систему управления, включающую микропроцессор, соединенный с аккумуляторной батареей, радиодатчиком, лидарами, GPS или GLONASS модулем, программируемой системой принятия решений, отличающийся тем, что содержит шасси, состоящее из двух стоек, расположенных справа и слева от корпуса, каждая из которых подвижно закреплена верхней частью к корпусу с возможностью поднимания поворотным механизмом по командам микропроцессора на сервопривод поворотного механизма, а своей нижней частью каждая стойка соединена с горизонтальной опорой, при этом конструкция горизонтальной опоры и стойки шасси выполнены полыми для размещения кабель-канала, позволяющего осуществить разводку внутри конструкции шасси.
Также достижение технического результата обеспечивается способом посадки беспилотного летательного аппарата, при котором посадка происходит автоматически без участия оператора, на основании протокола, выполняемого микропроцессором.
Система принятия решений обращается к данным от датчиков - радиодатчик, датчик шасси, GPS/GLONASS система позиционирования, лидары, после чего полученные значения датчиков сопоставляются с набором диапазонов значений из библиотеки базы данных по параметрам: площадь посадочной зоны, угол посадочной зоны, рельеф посадочной зоны, и при допустимых параметрах, подается сигнал на сервоприводы, приводящие в движение поворотный механизм для опускания шасси путем поворота стойки шасси, соединенной перпендикулярно с опорой шасси, на угол 90° или менее, в зависимости от рельефа.
А при отклонении при посадке угла горизонта от допустимого диапазона наклона +/- 15°, протокол посадки отменяется, и аппарат снова набирает высоту.
Изобретение проиллюстрировано набором изображений, чертежей и блок-схемой, представленных на прилагаемых фиг.1-5.
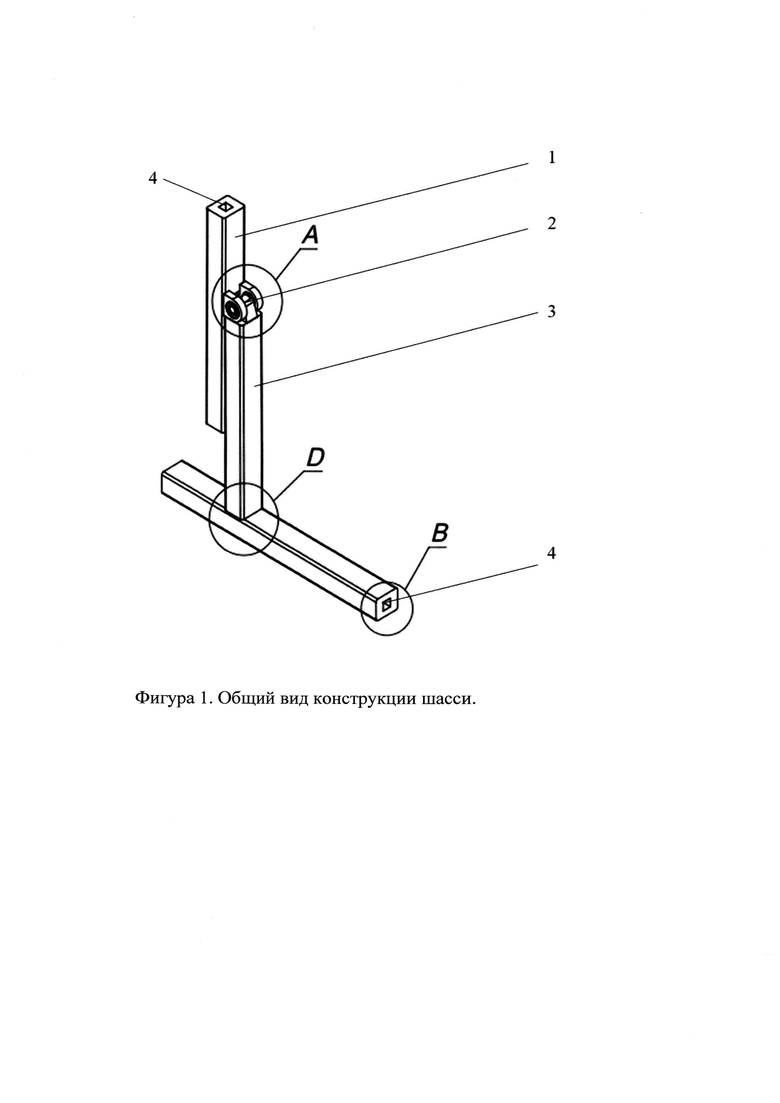
На фиг.1, 1.1 - 1.3 представлен общий вид шасси и его элементов, где:
1 - рама (интегрируемая в корпус аппарата часть конструкции);
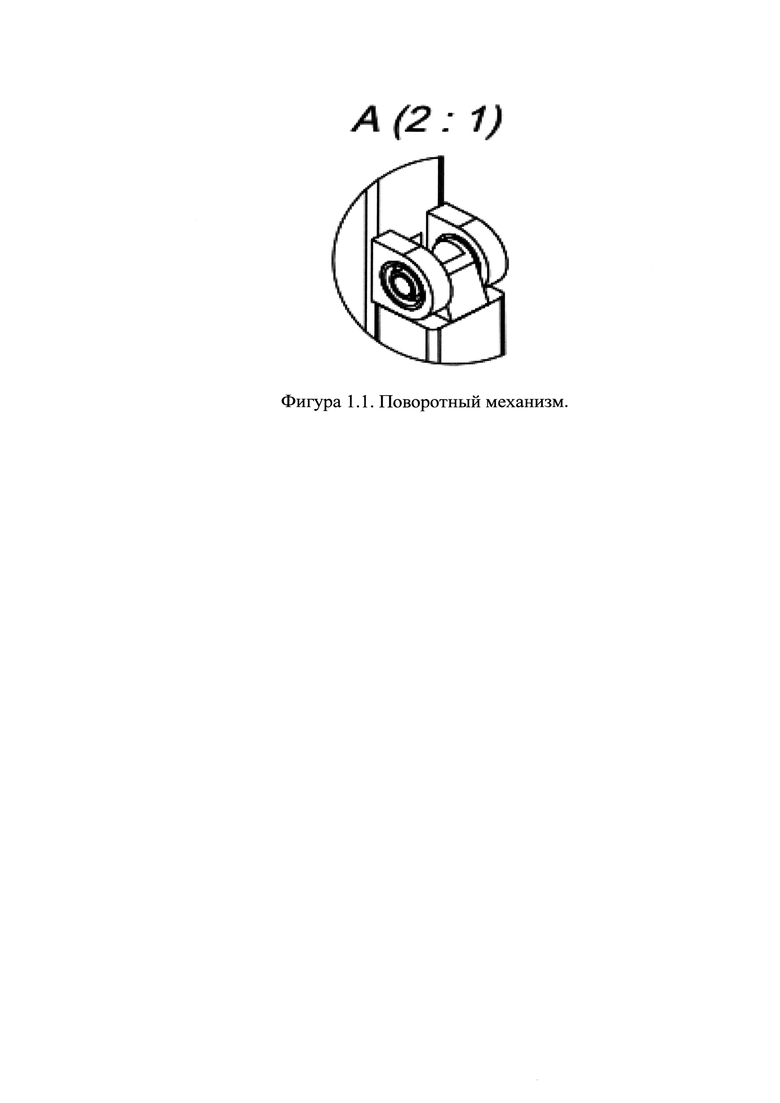
2 - поворотный механизм;
3 - подвижная часть шасси;
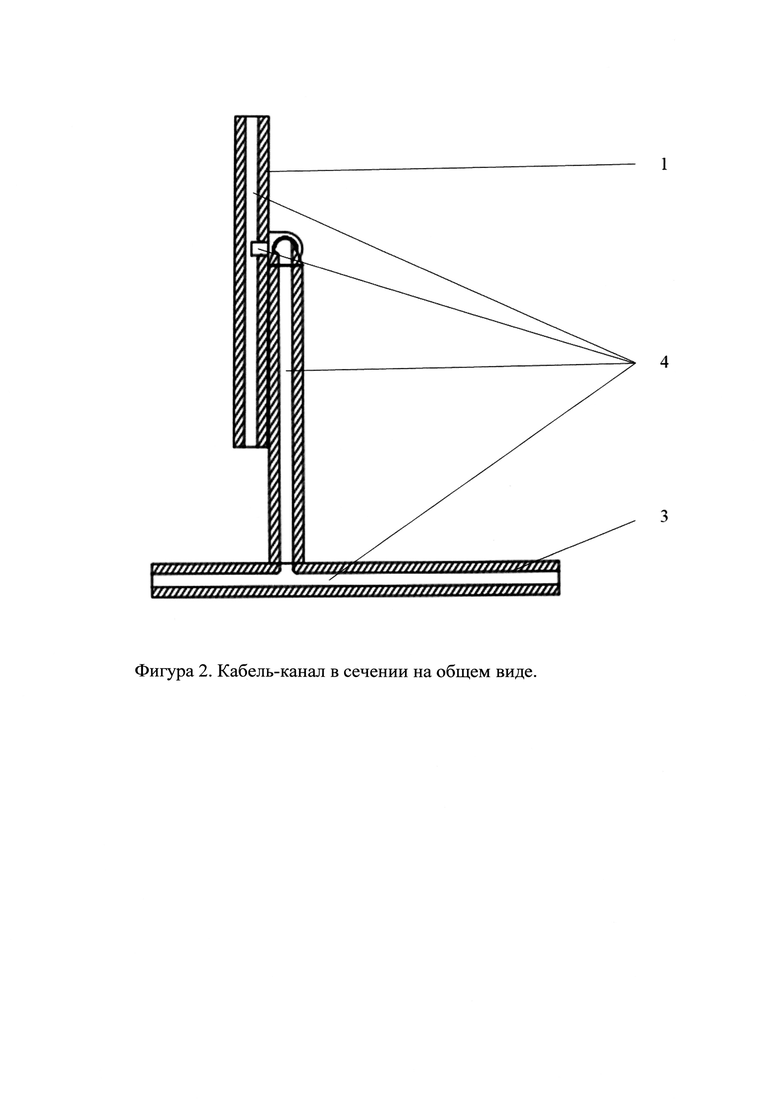
4 - кабель-канал.
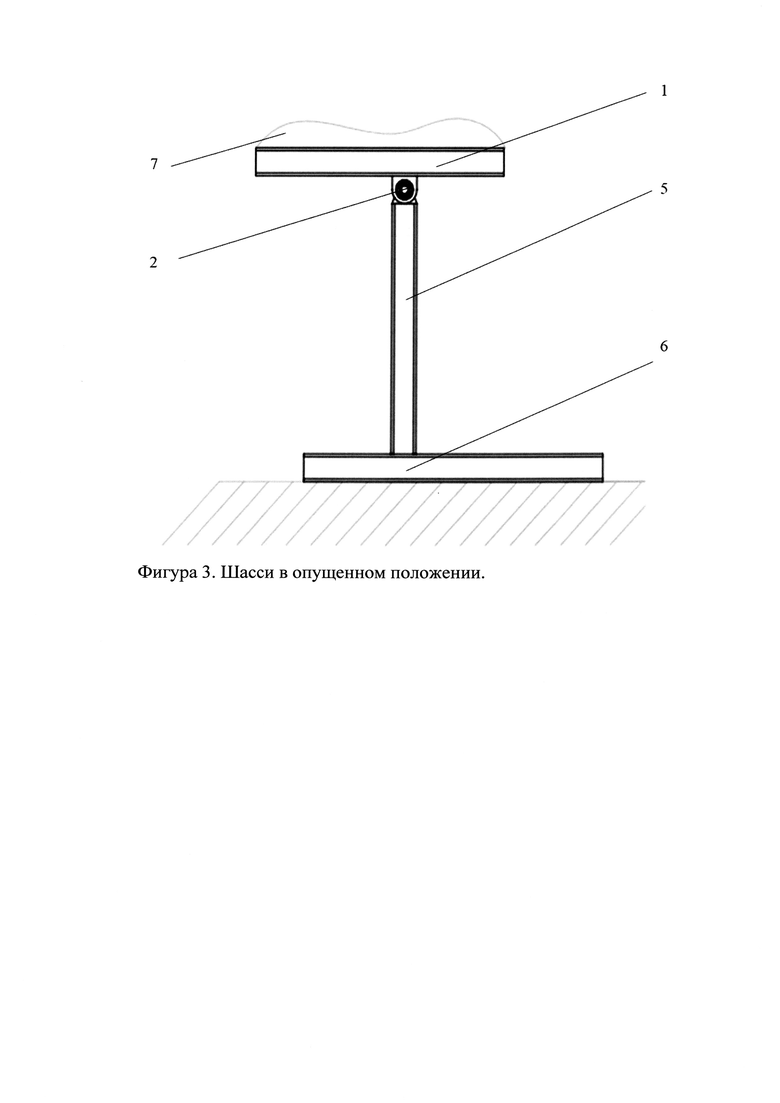
На фиг.3 также детализированы позиции:
5 - стойка шасси;
6 - опора шасси;
7 - корпус аппарата.
На фиг.2, 3 представлено шасси в опущенном (разложенном) виде. На фиг.2 представляется разрез для наглядного восприятия кабель-канала.
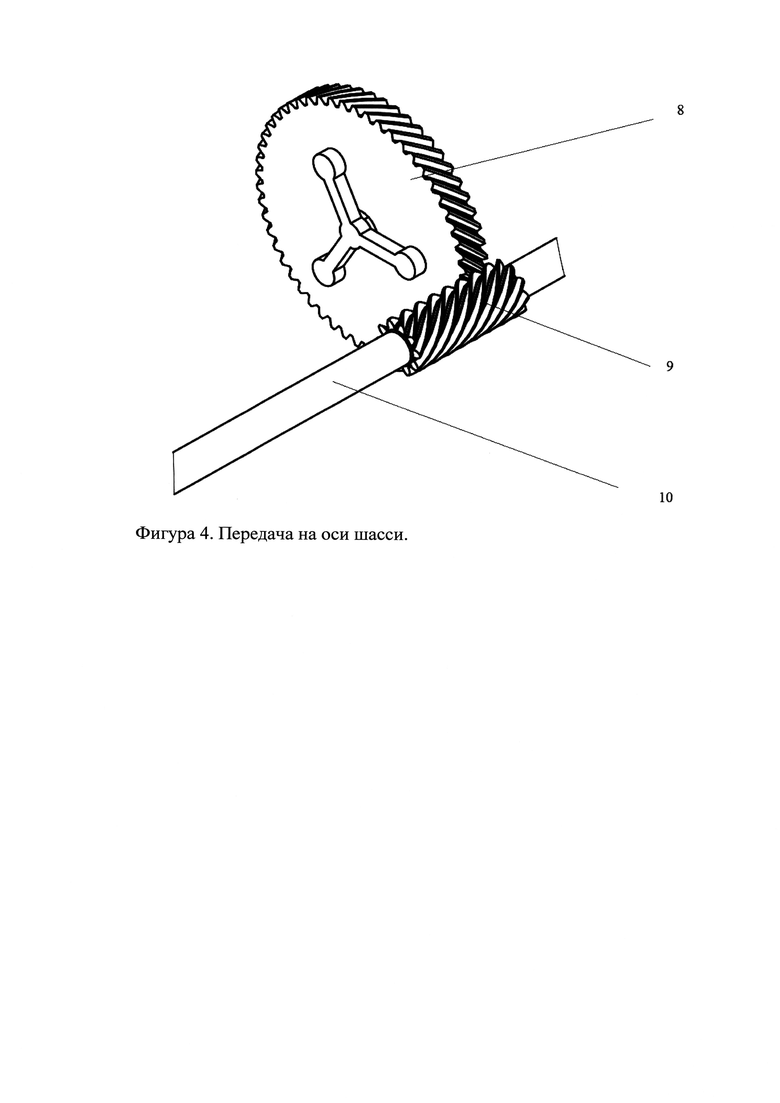
На фиг.4 представлена передача, для приведения в движение механизма шасси, где:
8 - зубчатое колесо;
9 - червяк;
10 - ось шасси.
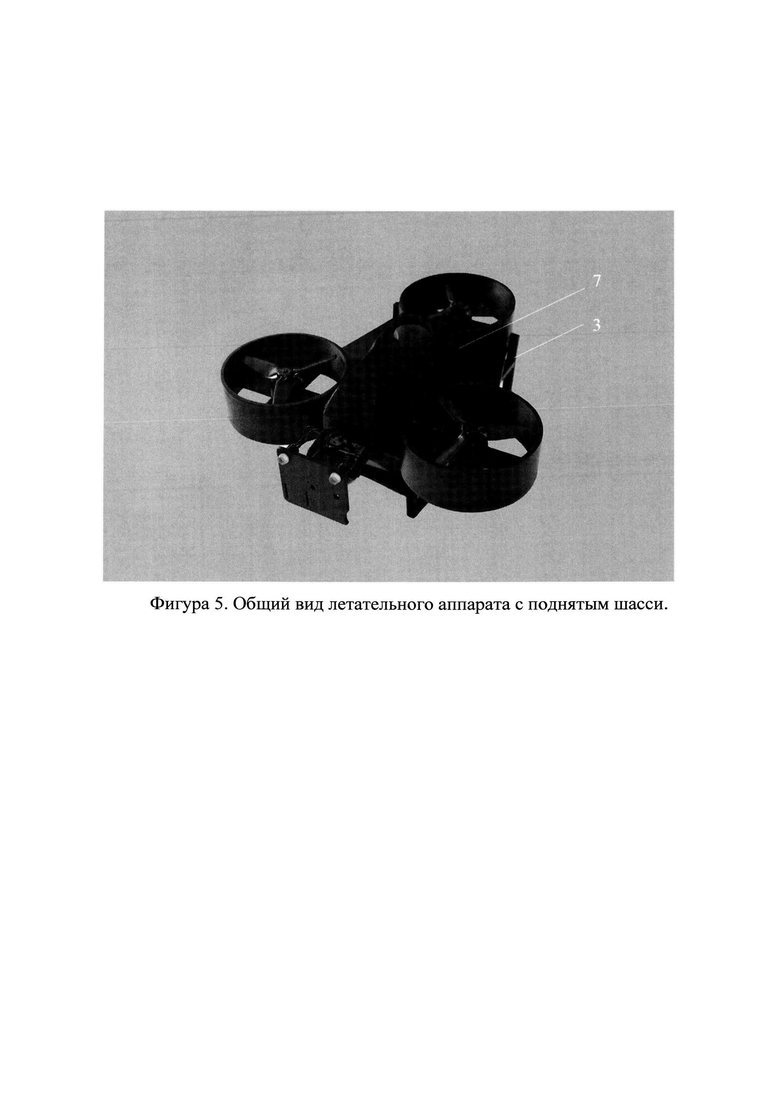
На фиг.5 представлен общий вид аппарата.
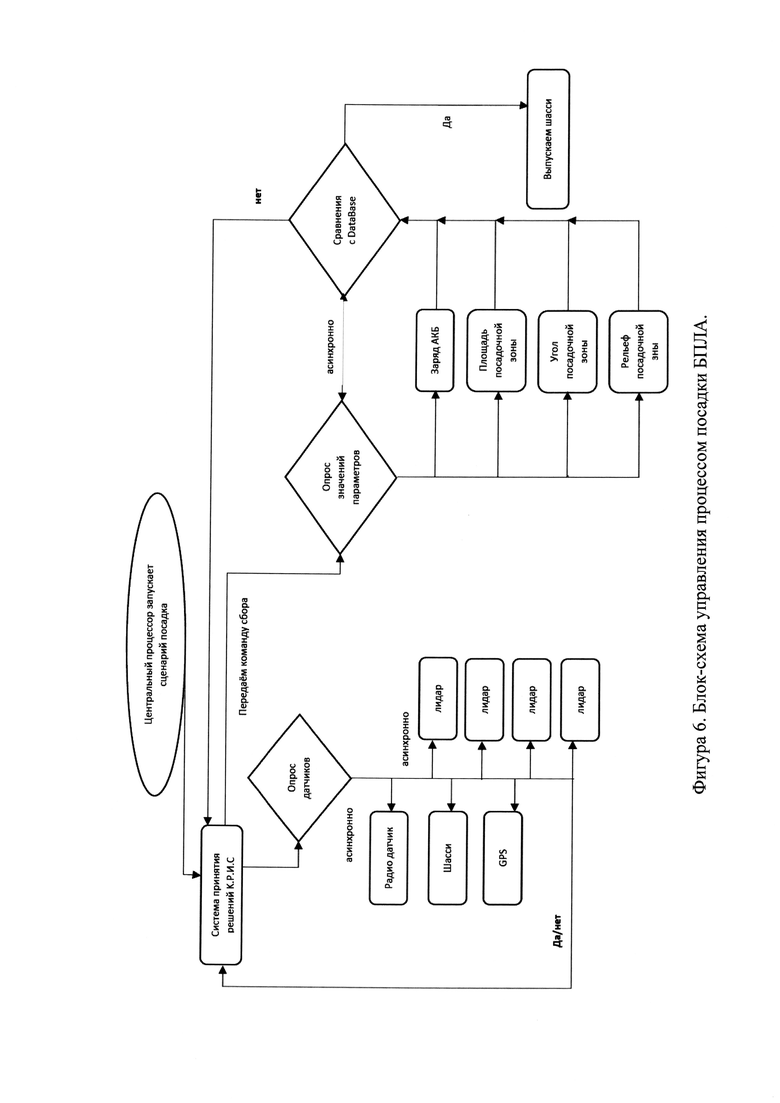
На фиг.6 представлена блок-схема процесса обработки данных при автоматизированной посадке. Описание блок-схемы приведено далее в рамках раскрытия изобретения и описании в динамике.
Шасси устроено следующим образом.
Верхняя часть шасси, рама, (1) интегрирована в конструкцию корпуса летательного аппарата. С рамой (1) соединена непосредственно подвижная часть шасси (3), состоящая из стойки (5) и опоры (6). Стойка и опора жестко соединены между собой под углом 90°. Стойка (5) подвижной части (3) соединена с рамой (1) через поворотный механизм (2) типа шарнирного соединяя. Поворотный механизм, показанный на рис 1.1 позволяющий обеспечивающий развертку посадочных опор на 90 градусов, комплектуется набором из пары подшипников, крепежным элементом, закрепляющимся непосредственно на подшипниках, установленной на боковой стенке заглушки, обеспечивающей защиту поворотного механизма и сервоприводом, приводящим механизм в движение. Снаружи поворотный механизм закрыт гибким защитным кожухом (рукавом), обеспечивающим пыле- и влагозащищенность. Оптимальным является исполнение с классом защиты IP66, но в зависимости от типовых задач конкретного аппарата, класс защиты может быть выше или ниже. Сервопривод соединен с зубчатой червячной передачей, а именно - с зубчатым колесом (8), находящемся в контакте с червяком (9), расположенным на оси шасси (10). Конструкция выполнена таким образом, чтобы сервопривод, передача и ось шасси находились внутри корпуса аппарата. Снаружи находится только край оси, где с торца оси (10) выполнено соединение с поворотным механизмом, соединяющему раму (1) и стойку (5).
Сервопривод получает команду на выпуск шасси от микропроцессора, после чего происходит раскрытие шасси. В качестве микропроцессора, например, может использоваться STM32H745ZIT производства STMicroelectronics или любой аналог соответствующего функционала и производительности. Микропроцессор соединен с датчиками, которые передают информацию для принятия решения, а именно: радиолокационным датчиком и лидарами. В качестве радиолокационного датчика может быть использован, например, ультразвуковой датчик HC-SR04. В качестве лидаров могут быть использованы, например, ToF-лидары. Все датчики закреплены на корпусе летательного аппарата. Радиолокационный датчик направлен вниз, лидары - по сторонам. В конструкции используется не менее 4 лидаров. В зависимости от предполагаемых целей использования аппарата, может быть установлено большее количество лидаров. Например, для выполнения задач, связанных с заходом в помещения.
Конструкция шасси выполнена полой, с кабель-каналом (4), позволяющим осуществить разводку внутри конструкции шасси. При соединении рамы (1) и опоры (5) также предусмотрено отвесите для единой непрерывной линии кабель-канала.
Кабель-канал: как видно на рис 1.2 и рис 2, в посадочных опорах имеется отверстие, необходимое для размещения гибкой антенны для передачи телеметрической информации. Особенностью шасси является размещение передающих телеметрические данные антенн в конструкции шасси, по всей длине кабель-канала, а провода, соединяющие антенны с модулем системы позиционирования GPS или GLONASS, проходят в корпус, непосредственно в котором расположен модуль.
Нижняя поверхность опоры (6), прилегающая к земле или соприкасающаяся с иной контактной поверхностью посадки может быть выполнена с нанесением насечек (по аналогии с рисунком протектора автомобильных шин) или может быть выполнено обрезинивание опоры шасси - для увеличения сцепления с поверхностью посадки.
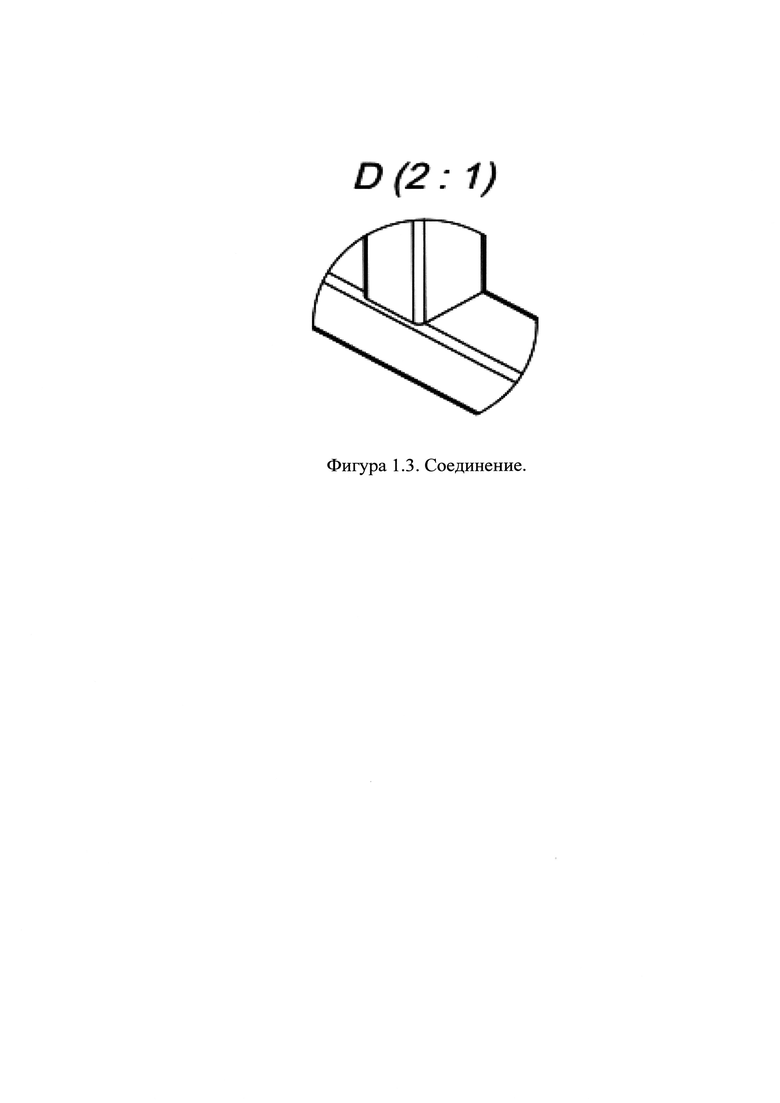
В качестве одного из вариантов исполнения, возможно использование алюминия как материала для посадочных опор, а именно - в виде профиля квадратного сечения, что позволяет говорить об унификации при производстве. На рисунке 1.3 показан способ крепления частей посадочных опор, представленный в виде аргонодугового метода, препятствующего в процессе сварки окисления алюминия при помощи вытеснения кислорода.
В качестве второго варианта исполнения, возможно использование карбона как материала для посадочных опор.
В качестве третьего варианта исполнения, возможно использование стеклобазальтпластика как материала для посадочных опор.
Шасси выполнено в виде конструкции типа «лыжа», данное конструктивное выполнение посадочных опор исключают опрокидывание аппарата после его приземления на поверхность, которая может быть как горизонтальной, так и располагаться под малым наклоном. Помимо этого, подобная конструкция позволяет одновременно обеспечить увеличение площади контакта с поверхностью и интегрировать в конструкцию антенны передачи телеметрии, которые находятся в оптимальном положении при сложенном шасси. Графически стыковку с поверхность можно увидеть на рис 3.
Общий вид варианта летательного аппарата с шасси, согласно изобретению, представлен на фиг.5, где:
3 - подвижная часть шасси (в сложенном виде);
7 - корпус летательного аппарата.
Для описания работы шасси в динамике, также необходимо обратиться к раскрытию способа управления посадкой беспилотного летательного аппарата. Для упрощения восприятия на фигуре 6 представлена блок-схема процесса автоматического управления процессом посадки.
Микропроцессор запускает сценарий «посадка». Основанием для запуска данного сценария является:
- сценарий задачи аппарата выполнен, аппарат вернулся на базу;
- экстренная посадка из-за поломки или повреждения;
- экстренная посадка из-за низкого заряда АКБ;
- сценарий задачи аппарата предполагает посадку в определенной точке с последующим продолжением полета;
- сценарий задачи аппарата предполагает посадку в определенной точке без продолжения полета и без возврата к точке вылета.
По поступлении команды сценария в систему принятия решений включается опрос датчиков: радио датчик, датчик шасси, GPS/GLONASS система позиционирования, лидары. Результаты опроса датчиков поступают в систему принятия решений. Данные обрабатываются асинхронно. Запись данных с датчиков происходит раз в секунду. Исходя из параметров сценария и показаний датчиков, запускается или не запускается опрос значений параметров состояния аппарата, а именно: заряд аккумуляторной батареи, площадь посадочной зоны, угол посадочной зоны, рельеф посадочной зоны. Заряд аккумуляторной батареи устанавливается, в частности, путем снятия текущего показания по емкости и его сопоставления с базовым показателем, соответствующим выполняемому сценарию. Площадь посадочной зоны устанавливается, в частности, путем обработки радиолокационной информации. Рельеф посадочной зоны устанавливается, в частности, также путем обработки радиолокационной информации. Угол посадочной зоны устанавливается, в частности, путем сопоставления данных о площади и рельефе посадочной зоны с показаниями гироскопических приборов, определяющих положение аппарата относительно линии горизонта. Полученные данные сравниваются с библиотекой базы данных. В случае попадания фактических значений в допустимый диапазон, дается команда выпуска шасси. Команда активирует сервоприводы, которые опускают пару шасси. При этом, в частности, в зависимости от площади и рельефа поверхности угол поворота стойки шасси на правом и левом шасси может отличаться, для того, чтобы обеспечить максимальную устойчивость в горизонтальном положении с сохранением линии горизонта аппарата. Также при этом, после посадки обработка информации по заданному алгоритму продолжается и, в случае расхождения фактических параметров и расчетных (неустойчивость, скольжение, подтопление или частичное погружение в жидкую или вязкую среду), аппарат взлетает на исходную позицию и перезапускает сценарий «посадки» и передает соответствующий сигнал на базу.
Таким образом, обеспечивается уникальность конструкции и способа работы поднимаемого шасси для винтокрылых БПЛА. Технический результат - повышение автоматизации и автономности процесса посадки БПЛА обеспечивается описанным способом автоматической посадки аппарата. Технический результат - повышение защиты от повреждений выносного антенного оборудования обеспечивается представленной конструкцией поднимаемого шасси, выполненного полым для размещения интегрированной в конструкцию шасси антенны для передачи телеметрической информации.
| название | год | авторы | номер документа |
|---|---|---|---|
| МОДУЛЬНЫЙ БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2023 |
|
RU2816463C1 |
| Беспилотный летательный аппарат самолетного типа для обнаружения пропавшего человека | 2019 |
|
RU2723201C1 |
| Беспилотный летательный аппарат вертикального взлета и посадки | 2021 |
|
RU2771536C1 |
| БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 1995 |
|
RU2133210C1 |
| Беспилотный летательный аппарат для определения содержания питательных веществ растений в почве | 2024 |
|
RU2827242C1 |
| Автономный беспилотный летательный аппарат для доставки малокалиберных боеприпасов до цели | 2023 |
|
RU2826931C1 |
| Автоматическая станция зарядки и обслуживания беспилотных летательных аппаратов и беспилотный летательный аппарат, работающий совместно с ней | 2019 |
|
RU2721048C1 |
| Система автоматической дозаправки беспилотного летательного аппарата | 2020 |
|
RU2757400C1 |
| Беспилотный летательный аппарат для определения твердости почвы | 2024 |
|
RU2828501C1 |
| Автономная зарядная станция для беспилотных летательных аппаратов | 2021 |
|
RU2775272C1 |

Группа изобретений относится к беспилотному летательному аппарату (БПЛА) и способу его посадки. БПЛА содержит три винта, корпус, интегрированную в корпус систему управления с центральным процессором, аккумуляторную батарею, радиодатчик, лидары, GPS или GLONASS модули, программируемую систему принятия решений, пару подвижных поднимающихся шасси, расположенных справа и слева на корпусе, при этом конструкция горизонтальной опоры и стойки шасси выполнены полыми для размещения кабель-канала. Для посадки БПЛА система принятия решений сопоставляет показания датчиков БПЛА со значениями из библиотеки базы данных по допустимым параметрам посадки. При совпадении значений подается сигнал на сервоприводы для опускания шасси на определенный угол в зависимости от рельефа посадочной зоны. При отклонении угла горизонта от допустимого значения посадка отменяется. Обеспечивается повышение автоматизации и автономности процесса посадки БПЛА. 2 н. и 15 з.п. ф-лы, 9 ил.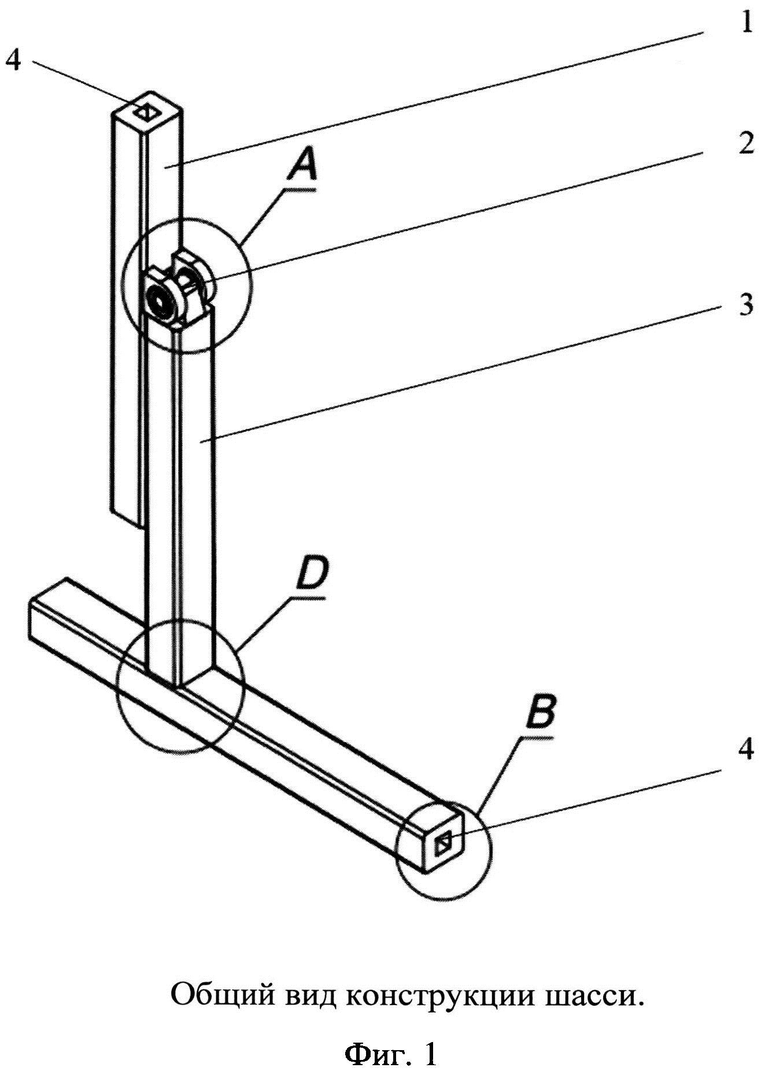
1. Беспилотный летательный аппарат вертолетного типа, содержащий три винта, корпус и интегрированную в корпус систему управления, включающую микропроцессор, соединенный с аккумуляторной батареей, радиодатчиком, лидарами, GPS или GLONASS модулем, программируемой системой принятия решений, отличающийся тем, что содержит шасси, состоящее из двух стоек, расположенных справа и слева от корпуса, каждая из которых подвижно закреплена верхней частью к корпусу с возможностью поднимания поворотным механизмом по командам микропроцессора на сервопривод поворотного механизма, а своей нижней частью каждая стойка соединена с горизонтальной опорой, при этом конструкция горизонтальной опоры и стойки шасси выполнены полыми для размещения кабель-канала, позволяющего осуществить разводку внутри конструкции шасси.
2. Беспилотный летательный аппарат по п. 1, в котором нижняя поверхность опоры может быть выполнена с нанесением насечек или может быть выполнено обрезинивание опоры.
3. Беспилотный летательный аппарат по п. 1, в котором при этом угол поворота опоры при раскрытии шасси может быть разным для одного и второго шасси в зависимости от поверхности посадки.
4. Беспилотный летательный аппарат по п. 1, в котором в качестве материала шасси может быть использован алюминий, карбон или стеклобазальтпластик.
5. Беспилотный летательный аппарат по п. 1, в котором раскрытие и подъем шасси происходит в направлении по ходу движения.
6. Беспилотный летательный аппарат по п. 1, в котором шасси опускаются посредством сервоприводов, приводимых в движение по команде от микропроцессора.
7. Беспилотный летательный аппарат по п. 1, в котором угол поворота опоры шасси с помощью сервопривода может быть до 90°.
8. Беспилотный летательный аппарат по п. 1, в котором снаружи поворотный механизм закрыт гибким защитным кожухом (рукавом), обеспечивающим пыле- и влагозащищенность.
9. Беспилотный летательный аппарат по п. 1, в котором снаружи находится только край оси, где с торца оси выполнено соединение с поворотным механизмом, соединяющим раму и стойку шасси, а зубчатая червячная передача, непосредственно ось и сервопривод находятся внутри корпуса.
10. Беспилотный летательный аппарат по п. 1, в котором на корпусе установлены не менее четырех лидаров, соединенных с микропроцессором.
11. Беспилотный летательный аппарат по п. 1, в котором радиолокационный датчик направлен вниз.
12. Беспилотный летательный аппарат по п. 1, в котором в качестве радиолокационного датчика может быть использован ультразвуковой датчик HC-SR04.
13. Беспилотный летательный аппарат по п. 1, в котором в качестве микропроцессора может использоваться STM32H745ZIT или любой аналог соответствующего функционала и производительности.
14. Способ посадки беспилотного летательного аппарата, при котором посадка происходит автоматически без участия оператора, на основании протокола, выполняемого микропроцессором, при этом система принятия решений обращается к данным от датчиков - радиодатчик, датчик шасси, GPS/GLONASS-система позиционирования, лидары, после чего полученные значения датчиков сопоставляются с набором диапазонов значений из библиотеки базы данных по параметрам: площадь посадочной зоны, угол посадочной зоны, рельеф посадочной зоны, и при допустимых параметрах подается сигнал на сервоприводы, приводящие в движение поворотный механизм для опускания шасси путем поворота стойки шасси, соединенной перпендикулярно с опорой шасси, на угол 90° или менее, в зависимости от рельефа, а при отклонении при посадке угла горизонта от допустимого диапазона наклона +/- 15°, протокол посадки отменяется, и аппарат снова набирает высоту.
15. Способ посадки беспилотного летательного аппарата по п. 14, при котором микропроцессор запускает сценарий посадки на основании одного из событий - сценарий задачи аппарата выполнен, аппарат вернулся на базу или экстренная посадка из-за поломки или повреждения, или экстренная посадка из-за низкого заряда АКБ или сценарий задачи аппарата предполагает посадку в определенной точке с последующим продолжением полета, или сценарий задачи аппарата предполагает посадку в определенной точке без продолжения полета и без возврата к точке вылета.
16. Способ посадки беспилотного летательного аппарата по п. 14, отличающийся тем, что в зависимости от рельефа угол поворота и конечное положение каждого из двух шасси может быть различным.
17. Способ посадки беспилотного летательного аппарата по п. 14, отличающийся тем, что сервопривод приводит в движение зубчатое колесо, входящее в состав червячной зубчатой передачи, и при вращении червяка, расположенного на оси шасси, осуществляется поворот оси, обеспечивающий опускание стойки и опоры шасси.
| КАТАЛИЗАТОР ГИДРИРОВАНИЯ ВЫСШИХ ЖИРНЫХ КНСЛОТ в СПИРТЫ | 0 |
|
SU204990A1 |
| ПЛАВУЧИЙ СТРЕЛОВОЙ КРАН | 0 |
|
SU187275A1 |
| FR 3033544 B1, 24.03.2017 | |||
| CN 107571990 A, 12.01.2018 | |||
| EP 3067273 B1, 14.06.2017 | |||
| CN 106005413 A, 12.10.2016. | |||

