Изобретение относится к устройствам для сортировки круглого леса и может быть использовано при сортировке древесных стволов по породе.
Известно устройство для управления сортировкой круглого леса на продольном транспортере ЛТ-86Б ЗАО «Лесмаш» с цепным тяговым органом с длинными калиброванными звеньями из круглой стали и быстросъемными грузонесущими траверсами гравитационного типа [1. Завойских, Г. И. Лесоскладское оборудование для первичной обработки и сортировки древесного сырья: учеб.-метод. пособие для студентов специальностей 1-46 01 01 «Лесоинженерное дело», 1- 36 05 01 «Машины и оборудование лесного комплекса» / Г. И. Завойских, П. А. Протас, В. Н. Лой. – Минск: БГТУ, 2007. – с. 101. ISBN 978-985-434-745-5]. Вдоль продольного транспортера с одной стороны от него равномерно расположены накопители отсортированного круглого леса. Пульт управления расположен на начальном участке продольного транспортера и оснащен кнопками задания адреса выбранного оператором накопителя. Фотоствор выполнен с возможностью фиксации положения переднего или заднего торца круглого леса. Напротив фотоствора установлено устройство для нанесения магнитной метки на соответствующий участок цепи, а датчики – магнитные считыватели расположены около каждого накопителя. Магнитные считыватели подключены к механизмам сбрасывания круглого леса в накопитель.
Оператор, при прохождении мимо него ствола круглого леса, визуально оценивает его сортообразующие признаки и, нажимая на соответствующую кнопку пульта управления, указывает адрес накопителя. При достижении стволом круглого леса заданного накопителя, считыватель идентифицирует магнитную метку и включает механизм сброса круглого леса в накопитель.
Недостатком является ненадёжная считываемость магнитной метки с участка тяговой цепи, поскольку ее материал не является идеальным носителем для магнитной записи. Кроме того, неправильное считывание магнитной метки с участка цепи может быть обусловлено внешними погодными условиями (низкой температурой, осадками).
Известно устройство учета и управления сортировкой круглого леса для продольного транспортера ЛТ-182 ЗАО «Лесмаш» [1. - c. 102], который содержит тяговый орган – плоскую пластинчатую цепь с грузонесущими траверсами на опорах качения для перемещения и гравитационного сброса круглого леса. Траверса выполнена из двух одинаковых рычагов, шарнирно установленных на корпусе, и перемещается по направляющим.
Устройство учета и управления содержит измеритель диаметров стволов круглого леса, датчик угловых перемещений, выдающий информацию о линейном перемещении круглого леса, и пульт управления оператора, который расположен в начале транспортера. К пульту управления оператора подключены фотоствор и измеритель диаметра круглого леса. Фотоствор и измеритель диаметра круглого леса установлены напротив пульта управления оператора с возможностью фиксации положения переднего или заднего торца круглого леса и измерения диаметра с фиксированным шагом вдоль его длины. Датчик угловых перемещений расположен или на ведущем, или ведомом туере транспортера. Датчик угловых перемещений соединен с устройством для слежения за перемещением круглого леса до выбранного накопителя.
Оператор вводит в устройство управления информацию о сорте и породе круглого леса, а пульт управления адресует его в определённый накопитель. Устройство учета и управления сортировкой круглого леса отслеживает его движение и, в положенное время опускает участок направляющей для сброса круглого леса с тягового органа в накопитель.
Недостатком такого устройства является наличие единственного датчика углового перемещения. Ошибка слежения за перемещением круглого леса относительно выбранного накопителя возникает всегда независимо от того, на ведомой или ведущей звездочке установлен датчик. Величина ошибки может быть одинаковой или отличаться, но знак ошибки всегда противоположный. При увеличении длины сортировочного транспортера (от 100 до 200 метров) ошибка перемещения увеличивается выше предельного допустимого значения и ухудшает качество сортировки.
Известно устройство для управления сортировкой круглого леса ТС-73 [1. - с. 116], выбранное в качестве прототипа, содержащее программируемый контроллер, к которому подключены датчик угловых перемещений ведущей или ведомой многогранной звездочки без зубьев тягового органа – пластинчатой цепи транспортера, фотоствор, установленный напротив пульта оператора с возможностью фиксации положения переднего или заднего торца круглого леса, клавиатуру и блок индикации контроллера, силовой шкаф, к которому подключены симисторные выключатели, соединенные со сбрасывающими устройствами в соответствующие лесонакопители.
Данное устройство обеспечивает адресацию и выдачу управляющих сигналов на сброс круглого леса в накопители в соответствии с задаваемыми признаками. Поступающий на сортировочный транспортер круглый лес визуально оценивает оператор, который с помощью клавиатуры задает адрес сброса в соответствующий накопитель [1. - с. 117]. Положение каждой единицы круглого леса, заказанного оператором на сброс, определяется фотоствором, который выдает в контроллер два импульса – в момент пересечения фотоствора соответственно передним и задним торцом круглого леса, после чего осуществляется слежение за его перемещением по транспортеру по информации с фотоимпульсного датчика угловых перемещений. На блок индикации выводится визуальная информация о ходе процесса сортировки.
В функции контроллера входят ввод и обработка входной информации, поступающей от датчика угловых перемещений и фотоствора, информации о признаках круглого леса, вводимой оператором с клавиатуры, а также вывод информации на индикацию и управляющих сигналов на выбранное сбрасывающее устройство [1. - с. 118].
Недостатком этого устройства является наличие единственного датчика углового перемещения. Присутствует ошибка слежения за перемещением участка цепи транспортера с круглым лесом до выбранного накопителя, и при увеличении длины транспортера (от 100 до 200 м), за счет действия случайных возмущений, она увеличивается выше предельного значения.
Техническим результатом предложенного изобретения является создание устройства для управления сортировкой круглого леса в синхронно-следящем режиме, позволяющего уменьшить ошибку слежения за перемещением круглого леса до соответствующего накопителя.
Предложенное устройство для управления сортировкой круглого леса, также как в прототипе, содержит датчик измерения угловых перемещений ведущей/ведомой многогранной звездочки без зубьев замкнутой пластинчатой цепи продольного сортировочного транспортера, пульт управления, расположенный вблизи начальной части транспортера возле ведомой многогранной звездочки, фотоствор, установленный над сортировочным транспортером напротив пульта управления с возможностью фиксации положения переднего или заднего торца круглого леса, сбрасыватели в соответствующие накопители отсортированного леса.
Согласно изобретению, в качестве датчиков измерения угловых перемещений ведущей и ведомой многогранных звездочек использованы тахогенераторы, при этом вал первого тахогенератора механически соединён с валом ведущей многогранной звездочки. Вал второго тахогенератора механически соединён с валом ведомой многогранной звездочки. Выходы первого и второго тахогенераторов соединены с сумматором, к которому последовательно подключены усредняющий усилитель, масштабирующий усилитель, выход которого соединен со входом информационного электропривода, на валу которого установлен фотоимпульсный датчик углового положения, выход которого соединён с первым входом блока сортировки, второй вход которого соединён с выходом пульта управления оператора. Выходы блока сортировки подключены к входам командоаппаратов сбрасывателей. Выход фотоствора соединен с входом пульта управления.
Предложенное устройство по сравнению с прототипом:
- позволяет повысить точность формирования команд управления на сброс круглого леса в накопители за счёт синхронизации движения информации о перемещении в устройстве управления сортировкой с перемещением цепи с круглым лесом;
- предусматривает возможность масштабирования движения информации о перемещении круглого леса без привлечения дополнительных технических средств;
- при этом, на точность управления сбрасывателями не влияют случайные возмущения, износы звеньев цепи, деформация цепи при различной загрузке сортировочного транспортера.
На фиг. 1 изображена общая функциональная схема устройства для управления сортировкой круглого леса.
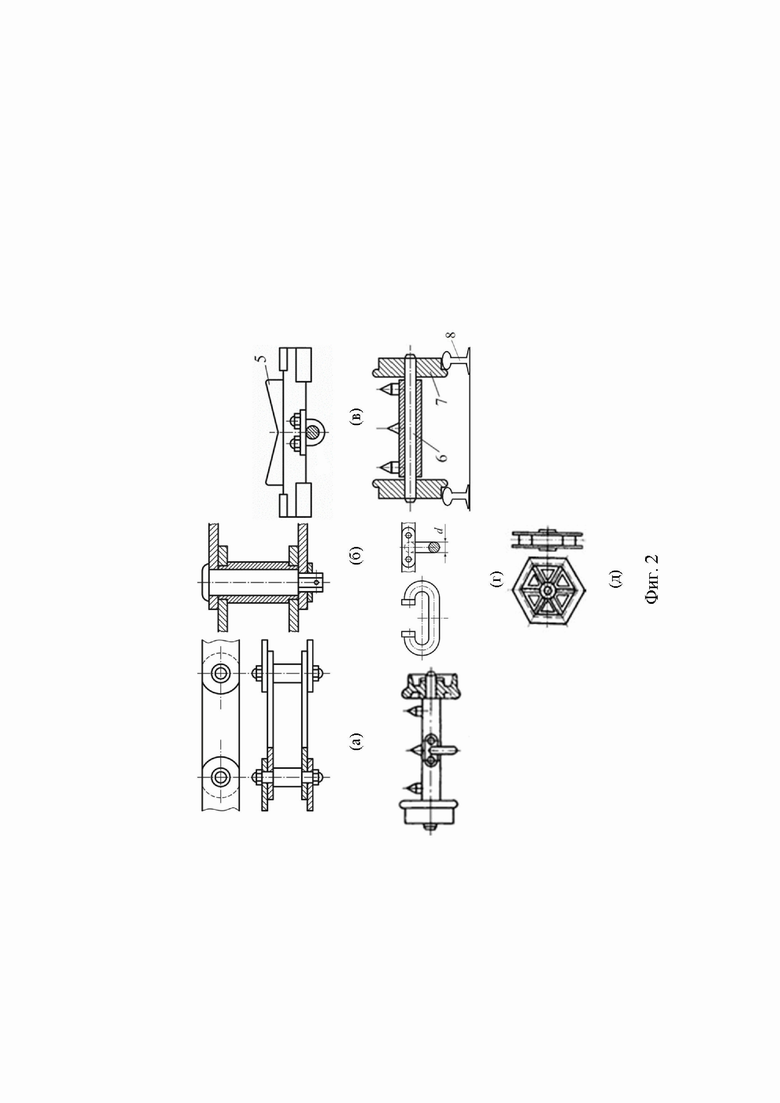
На фиг. 2 показаны тяговые устройства транспортеров: a – пластинчато-штыревая цепь; б – пластинчато-втулочная цепь; в – траверса на ползушках; г – траверса на катках; д – ведущая многогранная звездочка без зубьев замкнутой пластинчатой цепи.
Линия для сортировки круглого леса содержит два цепных продольных транспортера, расположенных на основании 1 (фиг. 1) последовательно, с зазором друг относительно друга на одной оси: подающего транспортера 2, протяженность которого, достаточна для размещения на нем не менее 2-3 единиц круглого леса одинаковой длины, и сортировочного транспортера 3 протяженностью от 100 до 200 метров.
Подающий 2 и сортировочный 3 транспортеры имеют одинаковую конструкцию, каждый из них состоит из бесконечно замкнутой в вертикальной плоскости на ведущей и ведомой многогранных звездочках без зубьев плоской пластинчато-штыревой (фиг. 2 а) или пластинчато-втулочной (фиг. 2 б) цепи 4.
На цепи на равных расстояниях друг от друга закреплены траверсы 5 седлоообразного вида (фиг. 2 в), служащие опорами для круглого леса и обеспечивающие его ориентацию по оси транспортера Траверсы 5 равномерно присоединены к звеньям плоской пластинчатой цепи 4 валиками 6 (фиг. 2 г) с выступающими наружу концами, на которых закреплены ролики 7 с возможностью качения по рельсообразным направляющим 8.
Установленая на основании 1 в конце ветви сортировочного транспортера 3 ведущая 9 многогранная звездочка (фиг. 1) соединена с натяжным устройством 10 и через редуктор 11 соединена с приводным асинхронным электродвигателем 12, который подключен к источнику питания промышленной электрической сети.
Рабочее место оператора с выносным пультом управления 13 (ПУ) расположено вблизи ведомой многогранной звездочки 14 в начальной части сортировочного транспортера 3.
Фотоствор 15 (ФС) расположен напротив пульта управления 13 (ПУ) над сортировочным транспортером 3, с возможностью фиксации положения переднего или заднего торца круглого леса 16. Фоствор 15 (ФС) состоит из источника света 151 (И) и приемника света 152 (П), расположенных напротив друг друга с обеих сторон единицы круглого леса. Вдоль сортировочного транспортера 3 с одной его стороны расположены бункеры-накопители 171, 172, ..., 17N-1, 17N, оборудованные наклонными направляющими от сортировочного транспортера 3. Количество накопителей 171, 172, ..., 17N-1, 17N равно максимальному числу сортиментов круглого леса плюс ещё один – аварийный. С другой стороны от сортировочного транспортера 3, над ним и напротив накопителей 171, 172, ..., 17N-1, 17N, установлены сбрасыватели 181 (СБ), 182 (СБ), ..., 18N-1 (СБ), 18N (СБ), каждый из которых выполнен с возможностью принудительного сталкивания круглого леса и содержит два полноповоротных рычага с круговым движением (с холостым ходом). Каждый рычаг соединен с валом мотор-редуктора, обмотка которого подключена к источнику питания через магнитный пускатель, обмотка которого соединена с командоаппаратом [1. - с. 110].
Вал ведомой многогранной звездочки 14 механически соединён с валом первого тахогенератора постоянного тока 20. Вал ведущей многогранной звездочки 9 механически соединён с валом второго тахогенератора 21. Обмотка якоря первого тахогенератора 20 (его выход) соединена информационным кабелем 19 с устройством для управления сортировкой круглого леса 22 (УУС), а именно с первым входом сумматора 23(С), входящего в его состав. Выход второго тахогенератора 21 соединён со вторым входом сумматора 23 (С). Выход сумматора 23 (С) соединен с входом усредняющего усилителя 24 (УУ), выход которого соединён с входом масштабирующего усилителя 25 (МУ). Выход масштабирующего усилителя 25 (МУ) соединён с входом информационного электропривода 26 (ИЭП), на выходном валу которого установлен фотоимпульсный датчик углового положения 27 (ИДП). Выход фотоимпульсного датчика углового положения 27 (ИДП) соединён с вторым входом блока сортировки 28 (БС), первый вход которого соединён с выходом пульта управления 13 (ПУ). Выходы блока сортировки 28 (БС) подключены к входам командоаппаратов сбрасывателей 181 (СБ), 182 (СБ), ..., 18N-1 (СБ), 18N (СБ). Выход фотоствора 15 (ФС) соединен с входом пульта управления оператора 13 (ПУ). Количество выходов блока сортировки 28 (БС) равно количеству командоаппаратов сбрасывателей 181 (СБ), 182 (СБ), ..., 18N-1 (СБ), 18N (СБ) и накопителей 171, 172, ..., 17N-1, 17N.
В качестве усредняющего усилителя 24 (УУ) и масштабирующего усилителя 25 (МУ) могут быть использованы аналоговые операционные усилители пропорционального типа. В качестве информационного электропривода 26 (ИЭП) может быть использован асинхронный частотно-управляемый электропривод, например, фирмы Danfoss. Фотоимпульсный датчик углового положения 27 (ИДП) – оптический фотоимпульсный датчик частоты вращения на базе инкрементального энкодера ЛИР-158А. Блок сортировки 28 (БС) представляет собой программируемый логический контроллер, например, ОВЕН ПЛК110-30 [https://www.souz-pribor.ru/catalog/industrial_automation/programmiruemye-logicheskie-kontrollery/plk110/#souz_description] с блоком аналого-цифрового преобразования входящей информации и предустановленными значениями расстояний от места сортировки круглого леса (фотоствора 15) до середины всех накопителей 171, 172, ..., 17N-1, 17N сортировочного транспортера 3.
Сортировочный транспортёр 3 приводят в движение асинхронным электродвигателем 12 соответствующей мощности, через редуктор 11, механически воздействуя на вал ведущей многогранной звездочки 9. Цепь 4 сортировочного транспортёра 3 приводится в непрерывное однонаправленное движение с помощью ведущей 9 и ведомой 14 многогранных звездочек. Средняя линейная скорость движения цепи сортировочного транспортера 3 составляет значение, порядка 1 м/с. Для предотвращения заторов круглого леса на сортировочном транспортере 3 средняя линейная скорость движения круглого леса на нем больше средней линейной скорости движения подающего транспортера 2.
Круглый лес поступает на сортировочный транспортер 3 с подающего транспортера 2, и соответственно, средняя частота вращения многогранной звездочки ωпод подающего транспортера 2 меньше частоты вращения ведущей ωсорт2 многогранной звездочки 9 и ведомой многогранной звездочки ωсорт1 14 сортировочного транспортера 3.
Измерение частот вращения ведомой ωсорт1 и ведущей ωсорт2 многогранных звездочек 9 и 14 сортировочного транспортера 3 и преобразование их вращения в напряжение осуществляют тахогенераторы 20 и 21. Напряжения тахогенераторов 20 и 21 по информационным кабелям подаются на входы сумматора 23 (С) Основным элементом устройства для управления сортировкой круглого леса 22 (УУС) является высокоточный информационный электропривод малой мощности 26 (ИЭП), закон движения вала которого совпадает с законом движения участка цепи с единицей круглого леса 16.
Устройством для управления сортировкой круглого леса 22 (УУС) осуществляется сортировка тактовыми импульсами, которые формируются фотоимпульсным датчиком углового положения 27 (ИДП), механически связанным с валом двигателя информационного электропривода 26 (ИЭП). Тактовые импульсы датчика углового положения 27 (ИДП) поступают на второй вход блока сортировки 28 (БС), на первый вход которого поступает сигнал от пульта управления 13 (ПУ) в момент, когда фотоствор 15 (ФС) определяет момент прохождения переднего или заднего торца отсортированного круглого леса через линию: источник света 151 (И) - приемник света 152 (П). Закон движения цепи сортировочного транспортера 3 в предложенном устройстве определяется выражением:

где S1 –расстояние, которое проходит круглый лес на сортировочном транспортере 3 от места его сортировки фотоствором 15 (ФС) и оператором на пульте управления 13 (ПУ) до выбранного бункера-накопителя 17, когда вал тахогенератора 20 механически соединен с валом ведомой многогранной звездочки 14, м;
S 2 – расстояние, которое проходит круглый лес на сортировочном транспортере 3 от места его сортировки фотоствором 15 (ФС) и оператором на пульте управления 13 (ПУ) до выбранного бункера-накопителя 17, когда вал тахогенератора 21 механически соединен с валом ведущей многогранной звездочки 9, м.
При любых значениях и способах определения перемещения сортируемого круглого леса, когда S1=S2 или S1≠S2, сигнал задания частоты вращения для управления информационным электроприводом 26 (ИЭП) определяется следующим выражением:

где Uтг1, Uтг2 – напряжения постоянного тока тахогенераторов 20 и 21;

k ТГ1 – коэффициент передачи первого тахогенератора 20, В/(1/с);
k ТГ2 – коэффициент передачи второго тахогенератора 21, В/(1/с);
Напряжения Uтг1 и Uтг2 тахогенераторов 20 и 21, пропорциональные частотам вращения ведущей 9 и ведомой 14 многогранных звездочек, подают на вход сумматора 23 (С), где они складываются, результат суммирования умножается на коэффициент ½ усредняющего усилителя 24 (УУ), и далее масштабируются масштабирующим усилителем 25 (МУ) с возможностью подстроить его коэффициент усиления с учетом изменения среднего радиуса R многогранных звездочек 9 и 14 за счет износа звеньев цепи и геометрических размеров звездочек. Аналоговый сигнал с выхода масштабирующего усилителя 25 (MУ) задаёт частоту вращения информационного электропривода 26 (ИЭП) согласно выражению:

где 
Фотоимпульсный датчик углового положения 27 (ИДП) выдает последовательность импульсов на второй вход блока сортировки 28 (БС), пропорциональную линейной скорости перемещения круглого леса от точки сортировки до середины выбранных накопителей 171, 172, ..., 17N-1, 17N.
Одновременно с этим блок сортировки 28 (БС) вычисляет интервалы времени ∆t1, ∆t2,…, ∆tN выдачи команды соответствующим сбрасывателям 181 (СБ), 182 (СБ), ..., 18N-1 (СБ), 18N (СБ) в моменты, когда вычисленное расстояние превысит предустановленное перемещение от места сортировки круглого леса до середины соответствующего накопителя 171, 172, ..., 17N-1, 17N.
Программное обеспечение блока сортировки 28 (БС) обеспечивает параллельное вычисление всех расстояний прохождения сортиментов круглого леса, одновременно находящихся на сортировочном транспортере 3, от места сортировки до выбранного накопителя 171, 172, ..., 17N-1, 17N. После сравнения вычисленного расстояния перемещения круглого леса до выбранного накопителя с предустановленным значением, блок сортировки 28 (БС) выдает команду на его сброс с таверс цепи 4 сортировочного транспортера 3.
Соответствующий сбрасыватель круглого леса 181 (СБ), 182 (СБ), ..., 18N-1 (СБ), 18N (СБ) срабатывает в момент времени, когда отсортированный круглый лес, находящийся на ложементах линейно движущейся цепи сортировочного транспортера 3, доставлен к выбранному накопителю 171, 172, ..., 17N-1, 17N. Не прошедший процедуру сортировки круглый лес сбрасывается в последний накопитель, из которого он может быть возвращён на подающий транспортер 2 для повторной сортировки.
Таким образом, происходит масштабирование пути S0, пройденного цепью 4 с единицей круглого леса до соответствующего накопителя 171, 172, ..., 17N-1, 17N. При настройке в работу устройства для управления сортировкой круглого леса с заданными параметрами кинематической схемы и максимальной длины сортировочной зоны продольного сортировочного транспортера 3 необходимо масштабировать S0. Для выполнения этой задачи предусмотрены усредняющий усилитель 24 (УУ) с коэффициентом усиления ½, усредняющий ошибку вычисления перемещения и масштабирующий усилитель 25 (МУ) с переменным коэффициентом усиления для регулирования частоты вращения и величины перемещения вала электропривода 26 (ИЭП) для коррекции вычисленного перемещения при механическом износе цепи 4 сортировочного транспортера 3, ведущей 9 и ведомой 14 звездочек.
Первоначальное масштабирование перемещения S0 по формуле (3) учитывается при окончательном масштабировании при запуске в работу устройства для управления сортировкой круглого леса с сохранением синхронности управления блока сортировки 28 (БС) с движением единицы круглого леса на цепи продольного сортировочного транспортера 3. Ошибка слежения за перемещением круглого леса к выбранному накопителю 171, 172, ..., 17N-1, 17N определяется величиной шага дискретности фотоимпульсного датчика углового положения 27 (ИДП) информационного электропривода 26 (ИЭП).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для сбрасывания бревен | 1981 |
|
SU982997A1 |
| УСТАНОВКА ДЛЯ СОРТИРОВКИ ДРЕВЕСИНЫ | 1971 |
|
SU291853A1 |
| Устройство для сортировки древесины | 1981 |
|
SU1045957A1 |
| Устройство управления сортировкой лесоматериалов | 1990 |
|
SU1794501A1 |
| СОРТИРОВОЧНАЯ МАШИНА ДЛЯ ЯИЦ | 1992 |
|
RU2038768C1 |
| КОМПЛЕКС ПРОМЕЖУТОЧНОГО НАКАПЛИВАНИЯ И ДОЗИРОВАННОЙ ПОДАЧИ НА СОРТИРОВКУ ПОСЫЛОК | 2018 |
|
RU2690969C1 |
| МОБИЛЬНОЕ УСТРОЙСТВО ДЛЯ СОРТИРОВКИ КРУГЛЫХ ЛЕСОМАТЕРИАЛОВ И ПОШТУЧНОЙ РАЗБОРКИ ИХ ПАЧЕК | 1990 |
|
RU2029639C1 |
| Устройство для сортировки круглых лесоматериалов | 1980 |
|
SU937056A1 |
| Устройство для сортировки досок и др. пиломатериалов | 1957 |
|
SU113645A1 |
| Сортировочно-сплоточная поточная линия для лесных рейдов | 1956 |
|
SU112859A1 |
Изобретение относится к устройствам для сортировки круглого леса и может быть использовано при сортировке древесных стволов по породе. Техническим результатом является уменьшение ошибки слежения за перемещением круглого леса до соответствующего накопителя. Технический результат достигается тем, что в качестве датчиков угловых перемещений ведущей и ведомой звездочек замкнутой пластинчатой цепи продольного сортировочного транспортера использованы тахогенераторы. Вал первого тахогенератора механически соединён с валом ведущей многогранной звездочки. Вал второго тахогенератора механически соединён с валом ведомой многогранной звездочки. Выходы первого и второго тахогенераторов соединены с сумматором, к которому последовательно подключены усредняющий усилитель, масштабирующий усилитель, выход которого соединен со входом информационного электропривода, на валу которого установлен фотоимпульсный датчик углового положения, выход которого соединён с первым входом блока сортировки, второй вход которого соединён с выходом пульта управления оператора. Выходы блока сортировки подключены к входам командоаппаратов сбрасывателей. Выход фотоствора соединен с входом пульта управления. 2 ил.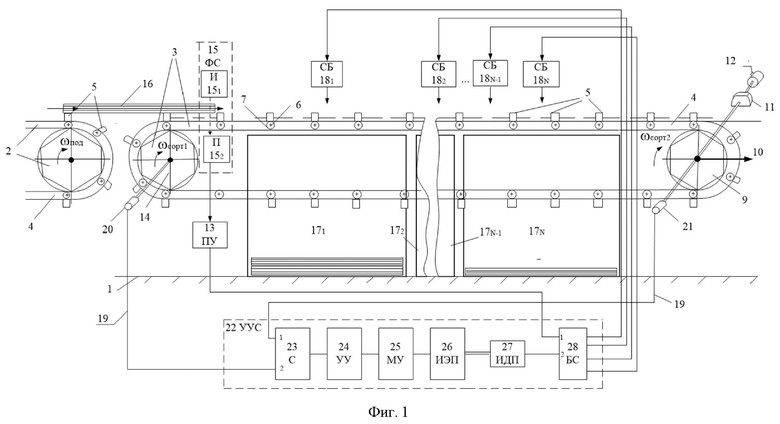
Устройство для управления сортировкой круглого леса, содержащее датчик угловых перемещений ведущей/ведомой многогранной звездочки без зубьев замкнутой пластинчатой цепи продольного сортировочного транспортера, пульт управления, расположенный вблизи начальной части транспортера возле ведомой звездочки, фотоствор, установленный над сортировочным транспортером напротив пульта управления с возможностью фиксации положения переднего или заднего торца круглого леса, сбрасыватели в соответствующие накопители отсортированного леса, отличающееся тем, что в качестве датчиков измерения угловых перемещений ведущей и ведомой многогранных звездочек использованы тахогенераторы, при этом вал первого тахогенератора механически соединён с валом ведущей многогранной звездочки, вал второго тахогенератора механически соединён с валом ведомой многогранной звездочки, выходы первого и второго тахогенераторов соединены с сумматором, к которому последовательно подключены усредняющий усилитель, масштабирующий усилитель, выход которого соединен со входом информационного электропривода, на валу которого установлен фотоимпульсный датчик углового положения, выход которого соединён с первым входом блока сортировки, второй вход которого соединён с выходом пульта управления оператора, выходы блока сортировки подключены к входам командоаппаратов сбрасывателей, выход фотоствора соединен с входом пульта управления.
| Завойских Г | |||
| И | |||
| Лесоскладское оборудование для первичной обработки и сортировки древесного сырья: учеб.-метод | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| И | |||
| Завойских, П | |||
| А | |||
| Протас, В | |||
| Н | |||
| Лой | |||
| - Минск: БГТУ, 2007 | |||
| Сепаратор-центрофуга с периодическим выпуском продуктов | 1922 |
|
SU128A1 |
| Способ получения бензидиновых оснований | 1921 |
|
SU116A1 |
| RU | |||

