ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к отслеживанию объекта и локальному получению изображения от объекта и, более конкретно, локальному получению изображения от местоположения на объекте.
УРОВЕНЬ ТЕХНИКИ
Хирургия с применением ультразвука, использующая трехмерные (3D) эхоизображения, быстро развивается вместе с успехами в развитии технологии преобразователей, сопровождаемой успехами в развитии технологии катетеризации.
Минимально инвазивная внутрисосудистая хирургия может выполняться с использованием различных возможных устройств, расположенных на дистальном конце катетера. Врач-клиницист вводит катетер в тело через разрез и через вену. Элемент управления присутствует на проксимальном конце, как на рукоятке, для управления направлением движения катетера по извилистому пути. В целевом положении устройством (или "микроманипулятором") манипулируют проксимально, чтобы выполнять хирургическую операцию. Другими типами хирургических операций, выполняемых при помощи катетера, являются лапароскопия, торакоскопия, плевроскопия, атерэктомия, лазерная абляция и т.д.
Патент США № 6226547, выданный Lockhart и др. (в дальнейшем "Lockhart"), раскрывает использование магнитного поля для отслеживания катетера. Lockhart отображает местоположение головки катетера, но не упоминает визуализацию.
Публикация патента США №2009/0118620, выданного Tgavalekos и др. (в дальнейшем "Tgavalekos"), раскрывает катетер для абляции и формирующий изображение катетер для мониторинга абляции. Оба катетера отслеживаются с использованием магнитных свойств, и соответственные представления налагаются, для отображения, на предоперационную или интраоперационную визуализацию области, подвергающейся абляции. Визуализация изображения приводится в действие двигателем. Чтобы избежать мешающего влияния шума двигателя на отслеживание, множественные устройства отслеживания размещаются вместе на формирующем изображение катетере.
Патент США № 5217456, выданный Narciso, Jr. (в дальнейшем "Narciso"), сконфигурирован для получения изображения от дистального наконечника катетера с помощью переносимого в оптоволокне света, входящего и выходящего через аксиально вращающееся окно бокового обзора.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Аспекты настоящего изобретения направлены на решение проблем одного или нескольких недостатков, отмеченных выше относительно предшествующего уровня техники.
Ни один из вышеупомянутых документов, каждый из которых включен в настоящий документ полностью путем ссылки, не предлагает достаточного решения относительно того, каким образом безопасно, надежно и легко осуществлять мониторинг хирургической операции, применяющей катетер.
В настоящее время, отсутствует простое, эффективное, минимально инвазивное средство для обеспечения визуального руководства во время операции, которую выполняют с помощью катетера.
Конкретно и в качестве примера, конструктивное решение катетера с визуализацией у Tgavalekos усложняется необходимостью множественных устройств отслеживания. Кроме того, отсутствует локальная визуализация с точки обзора наконечника катетера для абляции. И при этом отсутствует такая визуализация, которая динамически перемещается вместе с наконечником, чтобы посредством этого совместно с общим видом, освобождать хирурга от действия элементами управления визуализацией в течение операции. И при этом отсутствует такая визуализация, которая предлагает преимущества ультразвука в дифференциальной визуализации мягких тканей.
Кроме того, хотя некоторые операционные катетеры включают в себя устройство локальной визуализации на дистальном наконечнике, как у Narciso, является обременительным включение всей функциональности, необходимой на наконечнике, например, устройство визуализации, микроманипулятор, механизм охлаждения в случае термической абляции и кабельные соединения управления направлением движения.
В аспекте настоящего изобретения устройство отслеживания и базируемой на основе точки обзора визуализации выполнено с возможностью выведения позиции и направления из местоположения на дистальном наконечнике инструмента удлиненной формы. Оно дополнительно выполнено с возможностью выполнения преобразования системы координат в соответствии с выведенной позицией и выведенным направлением, и для формирования, из местоположения и на основании результата преобразования, локального вида, который перемещается вместе с наконечником.
В качестве суб-аспекта, инструмент используется в качестве компонента устройства.
В дополнительном суб-аспекте инструмент оснащен для подачи, в наконечнике, медицинского лечения и/или медицинской аппаратуры.
В связанном суб-аспекте наконечник сконфигурирован конкретно для манипулирования тканями тела для медицинской цели.
В еще дополнительном связанном суб-аспекте инструмент включает в себя катетер. Наконечник располагают интракорпорально.
В другом суб-аспекте устройство выполнено с возможностью удержания, при перемещении, поля обзора для локального вида фиксированным, но локального вида в ином синхронного с позицией и направлением.
В качестве альтернативного суб-аспекта, устройство дополнительно выполнено с возможностью динамического обнаружения обновления позиции и/или направлении и для повторения динамически в ответ на обнаружение обновления, выведения, выполнения и формирования.
В дополнительном аспекте устройство, дополнительно выполненное с возможностью визуализации в реальном масштабе времени, включает в себя устройство отображения. Устройство дополнительно выполнено с возможностью отображения на устройстве отображения и из визуализации в реальном времени, локального вида и более общего вида, который включает в себя наконечник, но который не перемещается вместе с наконечником.
В качестве особого суб-аспекта, устройство дополнительно выполнено с возможностью повторения в качестве обновления, по меньшей мере, один раз в секунду, выведения, выполнения и формирования.
В конкретном суб-аспекте устройство дополнительно выполнено с возможностью ультразвуковой визуализации в реальном времени, и формирование основывается на данных, извлеченных из визуализации в реальном времени.
В качестве дополнительного суб-аспекта, формирование основывается на данных, извлеченных в реального времени визуализации наконечника.
В еще одном дополнительном суб-аспекте выведение влечет за собой определение позиции и/или направления на основании содержимого визуализации наконечника.
В одном особом суб-аспекте выведение направления включает в себя выполнение этого из визуализации в реальном времени структур в наконечнике.
Также является суб-аспектом, что устройство дополнительно включает в себя устройство отображения и выполнено с возможностью отображения локального вида на устройстве отображения.
В качестве дополнительного суб-аспекта, устройство дополнительно выполнено с возможностью визуализации в реальном времени и для переключения между локальным видом и более общим видом, который формируется из визуализации в реальном времени.
В еще дополнительном суб-аспекте переключение является ответным на приведение в действие пользователем элемента управления.
В альтернативном суб-аспекте устройство дополнительно выполнено с возможностью визуализации в реальном времени и для одновременного отображения локального вида и более общего вида, который формируется из визуализации в реальном времени.
В качестве одного другого суб-аспекта, устройство дополнительно включает в себя устройство отображения, и дополнительно выполнено с возможностью визуализации в реальном времени и для отображения, из визуализации в реальном времени, более общего вида, который включает в себя наконечник, но не перемещается вместе с наконечником.
В одном примерном суб-аспекте устройство включает в себя зонд чреспищеводной эхокардиографии (TEE), выполненный с возможностью вывода информации, исходя из которой происходит формирование.
В дополнительном суб-аспекте местоположение (позиция) перемещается вместе с наконечником, но является фиксированным относительно него.
В одном другом аспекте устройство выполнено с возможностью настройки преобразования путем приспосабливания ориентации вокруг оси в направлении с обратной связью от средства (устройства).
С помощью такой системы хирург может переключаться между "ландшафтным" видом сердца, включающим манипулятор (подобном "виду с высоты птичьего полета" в компьютерной игре) к "локальному" виду (подобному "представлению аватара" в компьютерной игре), показывающему часть сердца непосредственно впереди манипулятора. Считается, что метафора компьютерной игры является выразительной - эти два типа видов выделились как наиболее желательные виды во время игры с активными действиями – которая имеет большое сходство с активностью во время операции с вмешательством на сердце. Альтернативно можно рассматривать метафору поиска своего пути через пещеру – «карта пещеры» (ландшафтный вид) и «фонарь» (локальный вид) являются полезными оба – не только один или другой.
Общая проблема состоит в поддержке для хирурга координации «рука-глаз» во время применяющих ультразвук процедур с вмешательством на сердце. Но в частности предлагаемое в документе решает проблему обеспечения и локального вида, и ландшафтного вида оперируемой области сердца. Локальный вид используется для выполнения операции. Ландшафтный вид используется для позиционирования катетера с микроманипулятором. Следовательно, хорошая система должна обеспечивать оба.
Подробности нового устройства отслеживания и базируемой на точке обзора визуализации изложены дополнительно ниже с помощью следующих чертежей, которые не являются вычерченными в масштабе.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Фиг. 1 - схематичная и концептуальная схема устройства отслеживания хирургического инструмента и базируемой на точке обзора визуализации в соответствии с настоящим изобретением;
Фиг. 2 - концептуальная схема возможных снимков экрана устройства отображения и конфигураций в соответствии с настоящим изобретением;
Фиг. 3 - структурная и функциональная схема общего представления устройства отслеживания хирургического инструмента и базируемой на точке обзора визуализации в соответствии с настоящим изобретением;
Фиг. 4A, 4B, 4C - альтернативные блок-схемы отслеживания и базируемой на точке обзора визуализации в соответствии с настоящим изобретением; и
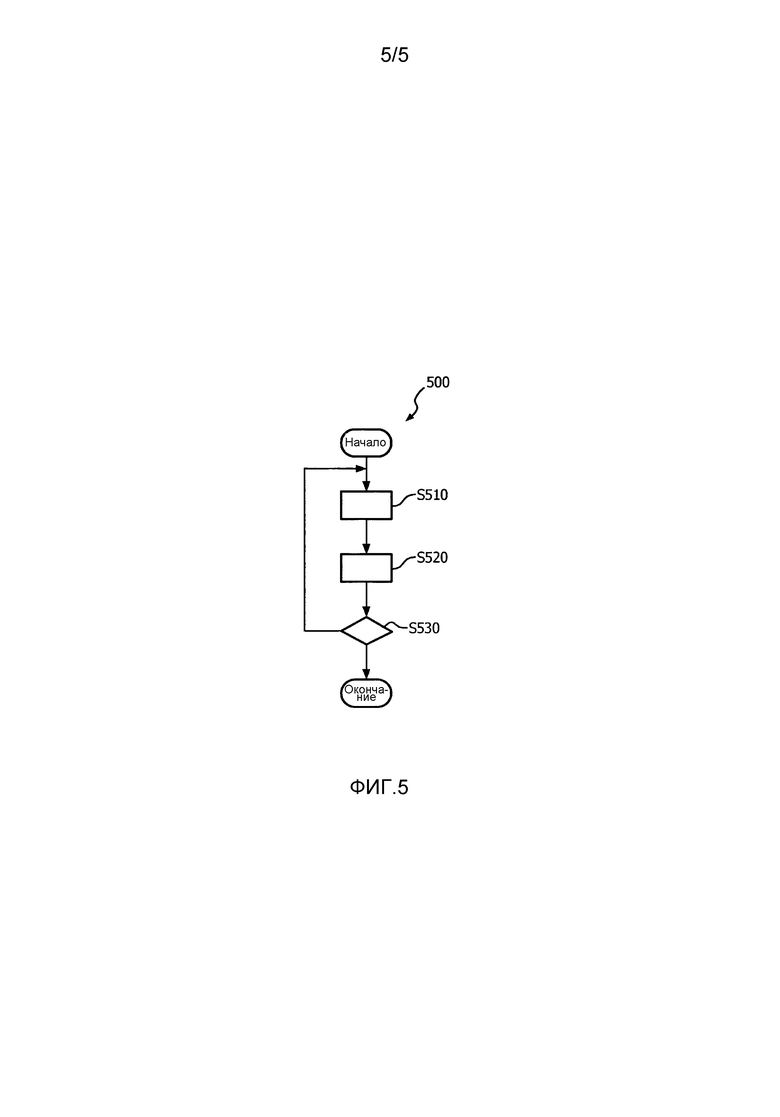
Фиг. 5 - блок-схема инициализации отображения локального вида в соответствии с настоящим изобретением.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
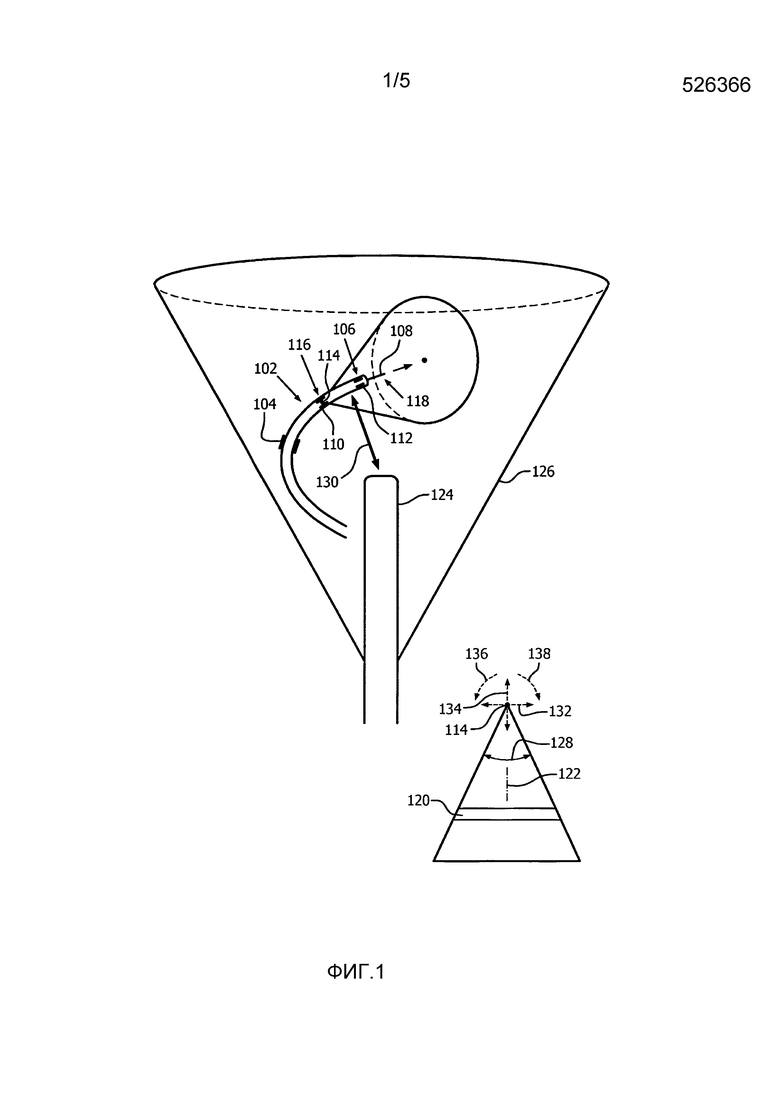
Фиг. 1 изображает примерное отслеживание хирургического инструмента и базируемой на точке обзора визуализации.
Корпус хирургического инструмента 102 удлиненной формы, такого как катетер для внутреннего использования, показан расположенным внутри кровеносного сосуда 104 или полости органа. На дистальном наконечнике 106 инструмента 102 находится электрод 108 для выполнения деструкции или электрофизиологии, например. Электрод 108 может быть втягиваемым и вытягиваемым. Втягиванием/вытягиванием и управлением направления движения управляют проксимально в рукоятке (не показана) инструмента 102. Также на дистальном наконечнике 106 находятся две эхоподобные структуры 110, 112, используемые для ультразвукового отслеживания наконечника. Структуры 110, 112 могут быть пустотно кольцевыми и радиально симметричными. Пустотность освобождает осевой центр корпуса катетера для функционирования подобно продвижению стента. Симметрия помогает идентификации центра каждой структуры 110, 112. Например, позиция 114 местоположения 116 на дистальном наконечнике 106 является центральной внутри проксимальной структуры 110, и направление 118 локального обзора с точки местоположения соответствует линии из местоположения в центр дистальной структуры 112. Локальный вид 120 проходит из этого местоположения 116 и в направлении 118 локального обзора. Локальный вид 120 реконструируется из прямой («живой») визуализации, как дополнительно подробно описано ниже. С локальным видом 120 связывается ориентация наконечника 106 вокруг оси 122 в направлении 118 локального обзора. Ориентация является релевантной для катетера, который, например, имеет для управления направлением "левый" вытяжной провод и "правый" вытяжной провод, как также описано более подробно дополнительно ниже. Одна или обе из структур 110, 112 в наконечнике 106 могут быть асимметричными по окружности, чтобы содействовать ультразвуковому определению ориентации. Альтернативно, дистальный наконечник 106 может включать в себя один или несколько преобразователей магнитного поля для отслеживания, как у Lockhartе и Tgavalekos. Хотя на Фиг. 1 направление 118 локального обзора показано являющимся продольным прямо вперед от дистального наконечника 106, альтернативно оно может иметь другое направление, такое как направление бокового обзора.
Чреспищеводный (TEE) зонд 124 показывается, в качестве иллюстративного и неограничительного примера, с оптикой переднего обзора, такой как обычно предусмотрена для внутрисосудистых ультразвуковых (IVUS) катетеров. Однако, оптика вместо этого, или кроме того, может включать в себя поддержку бокового обзора. Извлечение волюметрических данных 126 TEE происходит в режиме реального времени. Прямая визуализация включает в себя визуализацию дистального наконечника 106 и окружающей анатомии.
Из подмножества данных 126 формируется локальный вид 120, поле обзора (FOV) 128 которого обозначено на Фиг. 1 показанным диапазоном углов. Локальный вид 120, изображенный на Фиг. 1, формируется из визуализации плоскости C в реальном времени, хотя любое подмножество данных 126, массивное или тощее, может составлять локальный вид. Формирование локального вида 120 влечет за собой преобразование 130 системы координат для, по меньшей мере, соответствующих волюметрических данных 126 TEE к локальному виду. Локальный вид 120 перемещается вместе с дистальным наконечником 106 при FOV 128, остающимся фиксированным. FOV 128 показано на Фиг. 1 составляющим примерно 30 градусов, но может использоваться любой угловой сектор. Перемещение может быть поступательным, как видно из ортогональных разрывных двунаправленных прямых стрелок 132, 134 на Фиг. 1. Третье ортогональное направление представляет другой тип перемещения, но не показан на Фиг. 1. Перемещение также может быть вращательным, как видно из пары искривленных стрелок 136, 138, хотя в двух других ортогональных ориентациях возможны вращения в любом направлении. Таким образом, перемещение локального вида 120 в результате действия элементами управления катетером в рукоятке можно сравнить с перемещением фонаря в чьем-то захвате. Для клинических вмешательств локальный вид 120 лучше всего используется вместе с более общим видом, который включает в себя дистальный конец катетера 106 и окружающую анатомию, например, прямое изображение сердца.
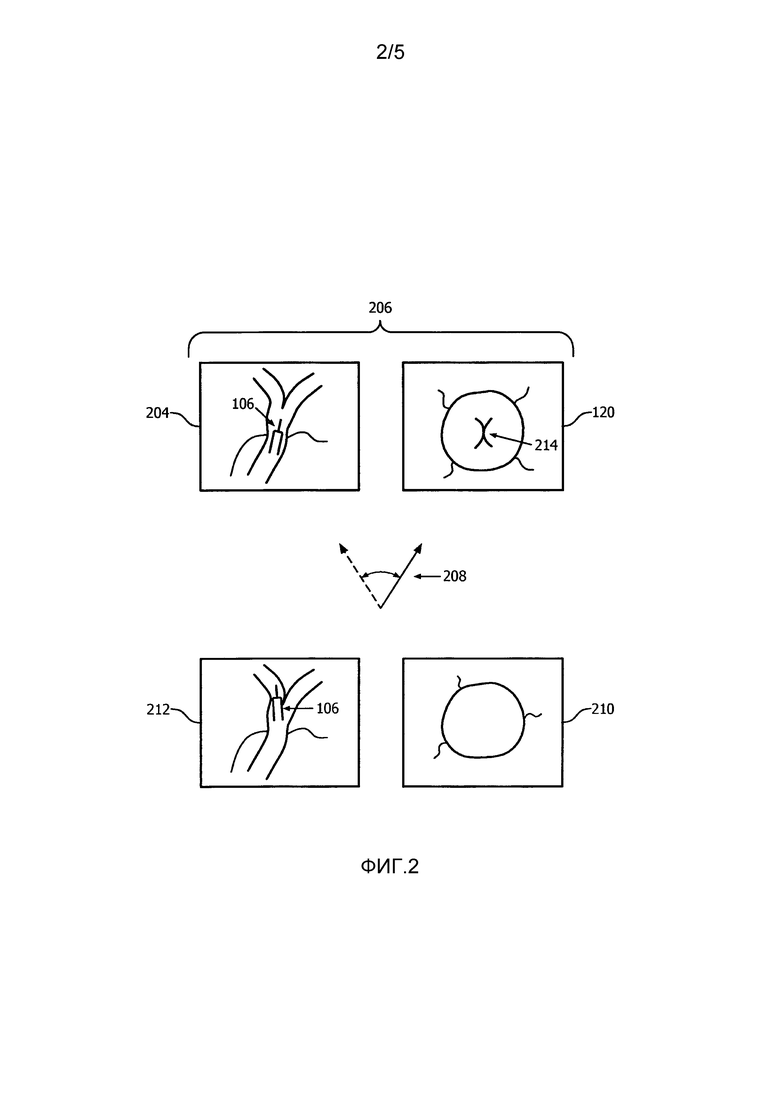
Локальный вид 120 на Фиг. 2 виден на отображении сопровождаемым более общим или глобальным видом 204. Скобка 206 на Фиг. 2 означает, что два вида 120, 204 появляются одновременно. Хирургу необходимо просто переключать свой взгляд между двумя видами 120, 204 в ходе выполнения оперативного вмешательства. Одновременно, хирург вручную действует пользовательскими элементами управления на рукоятке катетера, чтобы управлять микроманипулятором, расположенным на дистальном наконечнике 106 катетера. Оба вида 120, 204 предпочтительно обновляются в реальном времени, то есть, по меньшей мере, один раз в секунду или с другой частотой, такой как между 20 и 60 Гц. В качестве альтернативы, виды 120, 204 могут чередоваться на экране, как указано на Фиг. 2 конфигурацией 208 стрелки с разверткой сектора, необязательно каждый вид изменен по размеру, чтобы заполнить доступное пространство экрана. Каждое изменение может приводиться в действие пользователем как тумблерным переключателем, так и автоматически без вмешательства пользователя. При приведении в действие пользователем, руки врача-клинициста можно освобождать для операции, если используется ножная педаль. Тумблерный переключатель может вместо этого находиться на рукоятке катетера. Находится ли переключатель на рукоятке катетера, или в другом месте, например, на ультразвуковом пульте управления, если переключение делается вручную, это может делаться в удобный момент во время операции - хирург все еще освобожден от необходимости действовать ультразвуковыми элементами управления в ответ на изменения визуализации, которые сопровождают перемещение дистального наконечника 106.
В качестве временных обновлений, локальный вид 210 и одновременный более общий вид 212 показывают, что локальный вид перемещается вместе с дистальным наконечником 106, тогда как более общий вид - нет. Здесь, как видно из сравнения двух общих видов 204, 212, дистальный наконечник 106 перемещается в одно из двух ответвлений кровеносного сосуда 104, но вид не переместился. С другой стороны и соответственно, точка 214 ветвления, видимая ранее в локальном виде 120, более не является видимой, поскольку дистальный наконечник 106 вошел в левую ветвь и предоставляет теперь новый локальный вид 210.
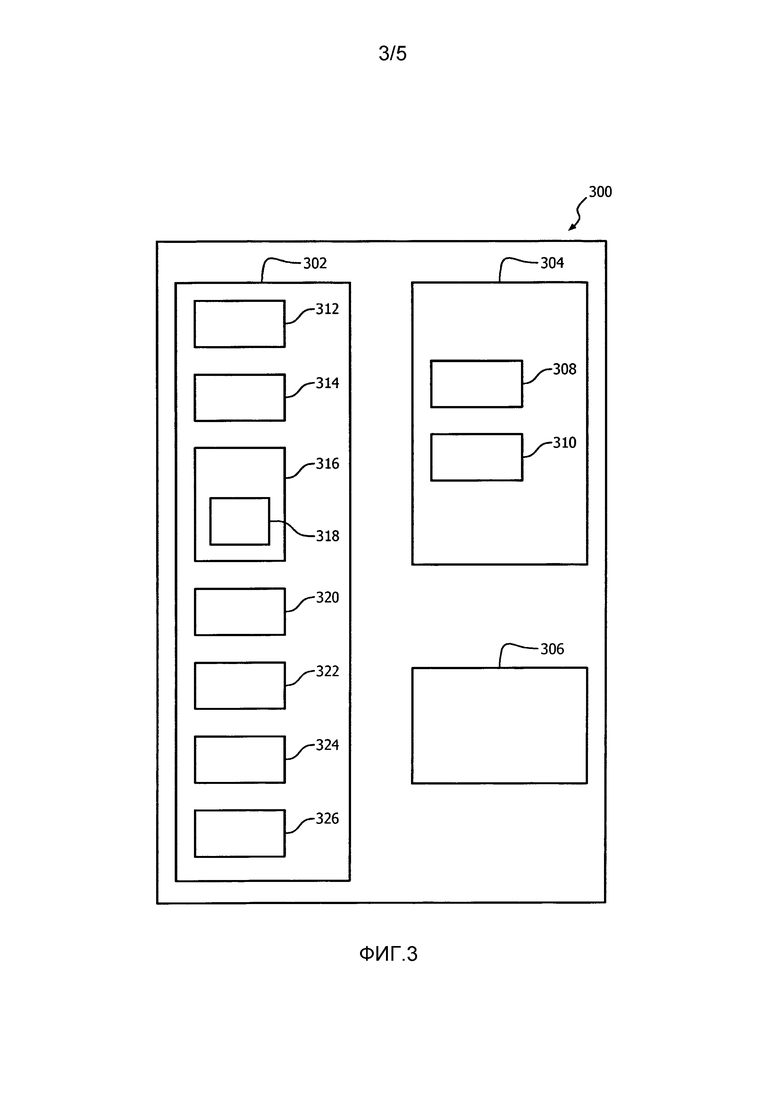
Фиг. 3 обеспечивает общее представление конкретного, примерного устройства 300 отслеживания хирургического инструмента и базируемой на точке обзора визуализации. Оно включает в себя хост-систему 302 и хирургический инструмент 304 удлиненной формы. Оно дополнительно включает в себя чреспищеводный зонд (TEE) 306 с наличием 2D ультразвукового преобразователя, и формирователь луча для 3D визуализации в реальном времени.
Хирургический инструмент 304 удлиненной формы составлен из проксимальной рукоятки и корпуса удлиненной формы. Корпус удлиненной формы включает в себя катетер 308 и, на дистальном наконечнике 106 катетера, микроманипулятор 310, такой как ножницы или плоскогубцы, механизм размещения стента или любое другое устройство. В более общем смысле, дистальный наконечник 106 может быть спроектирован для манипулирования или трансформации тканей тела. Или, он может быть спроектирован просто, или в дополнение, для мониторинга при помощи некоторого типа восприятия, для дозирования вещества, эндогенного или экзогенного, такого как лекарство, химическое вещество или агент, или ого может быть спроектировано для любого другого медицинского использования.
Хост-система 302 включает в себя микроконтроллер 312, устройство 314 отслеживания позиции и ориентации, программное обеспечение 316 формирования локального вида, которое включает в себя модуль 318 преобразования системы координат и пульт управления. Пульт управления имеет пользовательское устройство 320 отображения, такое как экран для представления изображений, и пользовательские элементы 322 управления для визуализации, которые включает в себя элемент 324 управления инициализацией ориентации локального вида, и элемент 326 управления переключением вида. Устройство 314 отслеживания позиции и ориентации использует волюметрические данные, извлеченные в режиме реального времени зондом 306 TEE, чтобы определить местоположение эхоподобных структур 110, 112 в наконечнике 106 катетера 308. Альтернативно, другие способы отслеживания могут включать в себя один или несколько преобразователей магнитного поля в наконечнике 106 катетера, и опорный элемент отслеживания, который может вводиться в пациента посредством отдельного катетера, как описано у Tgavalekos. В этом случае, опорный элемент отслеживания будет коммуникационно связан, беспроводным образом или проводной линией связи, с устройством отслеживания 314 в хост-системе 302. Хост-система 302 может быть реализована программно, аппаратно, микропрограммно или любой их комбинацией.
В некоторых вариантах осуществления, таких как зависящее от перемещения исполнение устройства 300, описанного дополнительно ниже, микроконтроллер 312 может быть спроектирован для обмена сигналами с электронным элементом управления в рукоятке катетера 308. Для некоторых вариантов осуществления устройство микроконтроллера 312 может быть реализовано в виде одной или нескольких интегральных схем.
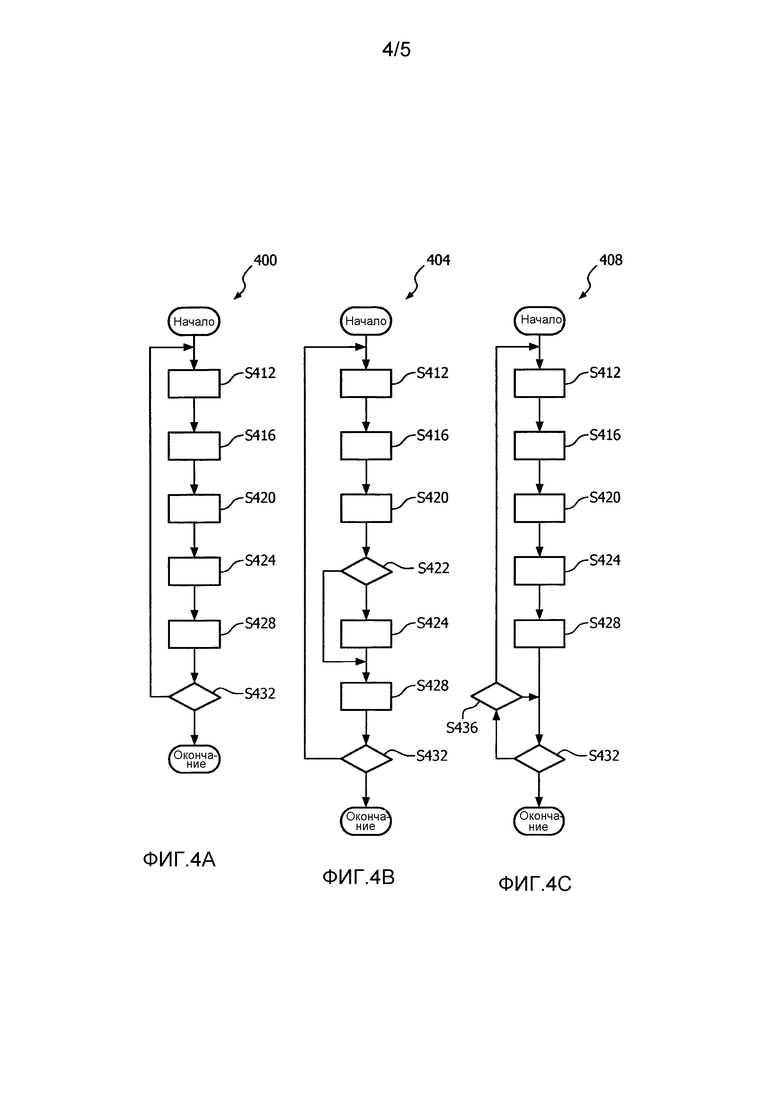
Что касается Фиг. 4A, 4B, 4C, отслеживание и базируемая на точке обзора визуализация является реализуемой в соответствии с независимым от перемещения процессом 400 или альтернативными, зависимыми от перемещения процессами 404, 408. Процессами 400, 404, 408 управляет микроконтроллер 312 в хост-системе 302.
Для независимого от перемещения процесса 400, общий вид 204 формируется из извлеченных радиочастотных (RF) данных прямого ультразвука (эхоизображения) (этап S412). Общий вид 204 связывается с конкретной геометрической конфигурацией, которая образует объемный набор RF данных. Конфигурация может быть ограниченной органом, таким как сердце или часть сердца.
Из общего вида 204 детектируют эхоподобные структуры 110, 112 в наконечнике 106 катетера (этап S416). Из одной 110 проксимальной из структур выводят позицию 114, и из обеих структур 110, 112 выводят локальное направление 118 обзора (этап S420). Эхогенность структур такова, что их яркость является автоматически различимой. Различение выполняется посредством устройства 314 отслеживания позиции и ориентации в визуализации, которая составляет общий вид. Все структуры 110, 112 могут быть кольцевыми, с газонаполненными промежутками, многослойными внутри стенок катетера 308. Чтобы дополнить позицию 114 и направление 118, также может быть выведена ориентация наконечника 106. Однако, ориентация катетера может не быть необходимой или требуемой, в каком случае любая произвольная ориентация может обеспечиваться для целей преобразования системы координат. Как отмечено выше в документе, альтернативу реализации эхоподобных структур 110, 112 представляет электромагнитное отслеживание. Результаты которого являются выводимыми посредством хост-системы 302. Выведение происходит на основании приема от средства дискретного отслеживания. Или выведение происходит в результате вычислений, выполняемых устройством 314 отслеживания позиции и ориентации на основании ввода от опорного элемента отслеживания. Из выведенных параметров координаты общего вида 204 преобразовываются в локальные координаты посредством модуля 318 преобразования системы координат из программного обеспечения 316 формирования локального вида. Это формирует локальный вид 120 (этап S424). Локальный и общий виды 120, 204 отображаются на устройстве отображения 320 (этап S428). Если визуализация должна продолжаться (этап S432), обработка возвращается на этап S412. Как упомянуто выше, процесс 400 может работать в режиме реального времени, осуществляя итерации, по меньшей мере, один раз в секунду.
Первый зависящий от перемещения процесс 404 является сходным, но включает в себя условный переход между третьим и четвертым этапами S420, S424. Если перемещение дистального наконечника 106 не обнаружено (этап S422), обработка пропускает этап S424 преобразования координат, чтобы отображать локальный и общий виды 120, 204 (этап S428). Перемещение наконечника детектировано, если либо позиция 114, направление 118, либо ориентация изменились после предыдущей итерации.
Второй зависящий от перемещения процесс 408, посредством этапа S436, условно приостанавливает процесс после последнего этапа S432, пока не будет обнаружено перемещение наконечника. Перемещение наконечника в этом процессе 408 обнаруживают посредством пользовательских элементов управления на рукоятке катетера 308. Элементы управления рукоятки коммуникационно связаны беспроводной или проводной линией связи с микроконтроллером 312 в хост-системе 302.
Необязательно, процесс 500 инициализации отображения локального вида иллюстрируется на Фиг. 5. В этом варианте осуществления устройство 300 отслеживания хирургического инструмента и базируемой на точке обзора визуализации имеет возможности средства управления направлением движения для хирургического инструмента 304 удлиненной формы и выполнено с возможностью настройки преобразования путем приспосабливания ориентации вокруг оси в направлении 118 с обратной связью от средства. Этот вариант осуществления предназначен для случая, когда пользователь требует или желает ориентацию, например, такую, что отображенный локальный вид 120 показывает правое перемещение при вытягивании "правого" кабеля управления катетером и левое движение при вытягивании "левого" кабеля управляющего. Операционно, пользователь манипулирует элементом 324 управления инициализацией ориентации локального вида посредством экранного ползунка, например, интерактивно, чтобы повернуть локальный вид 120 (этап S510). Это предполагает программное обеспечение 316 формирования локального вида, настраивающее преобразование согласно вынуждаемому пользователем повороту. Пользователь затем испытывает корректировку ориентации, действуя рукояткой катетера, чтобы слегка направлять дистальный наконечник 106 катетера (этап S520). Если пользователь видит на экране, что локальный вид 120 еще не совпадает с управлением направлением (этап S530), делает возврат на этап S510; иначе, корректировка завершена.
Устройство отслеживания и базируемой на точке обзора визуализации выполнено с возможностью выведения позиции, и направления от местоположения на дистальном наконечнике инструмента удлиненной формы, для выполнения преобразования системы координат в соответствии с позицией и направлением, и для формирования исходя из местоположения и на основании результата преобразования локального вида, который перемещается вместе с наконечником. Устройство может поддерживать при перемещении поле обзора локального вида фиксированным, но локального вида в ином синхронным с позицией и направлением. Из ультразвуковой визуализации в реальном времени могут отображаться локальный вид и более общий вид, который включает в себя наконечник, но который не перемещается вместе с упомянутым наконечником. Дистальный наконечник может быть таковым для катетера и может быть снабжен микроманипулятором для операции, сопровождаемой интерактивно комбинацией динамической локальной и общей визуализации.
Применения устройства отслеживания и базируемой на точке обзора визуализации включают в себя вмешательство на сердце и другие операции с применением ультразвука, которые используют микроманипулятор.
Тогда как изобретение было проиллюстрировано и описано подробно на чертежах и предшествующем описании, такая иллюстрация и описание должны считаться иллюстративными или примерными, а не ограничительными; изобретение не ограничивается раскрытыми вариантами осуществления.
Например, хотя неподвижный зонд TEE используется в иллюстративных вариантах осуществления, неподвижный зонд трансторакальной эхокардиографии (TTE) может вместо этого использоваться. Кроме того, хотя катетер, такой как сердечный катетер является инструментом удлиненной формы, используемым в иллюстративных вариантах осуществления, другие инструменты удлиненной формы, такие как лапароскоп, эндоскоп, колоноскоп или зеркало, находятся в рамках намеченного объема предлагаемого выше в документе. То, что предложено в документе выше, не ограничено терапией или диагнозом; например, отслеживание и базируемая на точке обзора визуализация могут использоваться в аутопсии с микроманипулятором, движущим ткань, чтобы выявить структуру.
Другие изменения к раскрытым вариантам осуществления могут быть поняты и осуществлены специалистами в данной области техники при практическом использовании заявленного изобретения на основании изучения чертежей, описания раскрытия и прилагаемой формулы изобретения. В формуле слово "содержащий" не исключает другие элементы или этапы, и форма единственного числа не исключает множественного. Любые ссылочные позиции в пунктах формулы изобретения не следует рассматривать ограничивающими объем.
Компьютерная программа может сохраняться мгновенно, временно или на более длительный промежуток времени на подходящем машиночитаемом носителе, таком как оптический носитель данных или твердотельный носитель. Такой носитель является долговременным только в смысле, что не является кратковременным, распространяющим сигналом, но включает другие формы читаемых компьютером носителей, такие как регистровая память, кэш процессора, оперативное запоминающее устройство (RAM) и другая энергозависимая память.
Одиночный процессор или другое устройство могут выполнять функции нескольких пунктов, перечисленных в формуле изобретения. Простой факт, что некоторые меры приведены во взаимно различных зависимых пунктах формулы, не означает, что комбинация этих мер не может использоваться с выгодой.
| название | год | авторы | номер документа |
|---|---|---|---|
| АДАПТИВНОЕ ФОРМИРОВАНИЕ ИЗОБРАЖЕНИЙ И ОПТИМИЗАЦИЯ ЧАСТОТЫ КАДРОВ НА ОСНОВЕ РАСПОЗНАВАНИЯ ФОРМЫ МЕДИЦИНСКИХ ИНСТРУМЕНТОВ В РЕЖИМЕ РЕАЛЬНОГО ВРЕМЕНИ | 2011 |
|
RU2726159C2 |
| СИСТЕМА ПОЛУЧЕНИЯ ИЗОБРАЖЕНИЙ С КАРДИО-И/ИЛИ ДЫХАТЕЛЬНОЙ СИНХРОНИЗАЦИЕЙ И СПОСОБ 2-МЕРНОЙ ВИЗУАЛИЗАЦИИ В РЕАЛЬНОМ ВРЕМЕНИ С ДОПОЛНЕНИЕМ ВИРТУАЛЬНЫМИ АНАТОМИЧЕСКИМИ СТРУКТУРАМИ ВО ВРЕМЯ ПРОЦЕДУР ИНТЕРВЕНЦИОННОЙ АБЛЯЦИИ ИЛИ УСТАНОВКИ КАРДИОСТИМУЛЯТОРА | 2009 |
|
RU2529481C2 |
| ИНТЕРВЕНЦИОННЫЕ ИНСТРУМЕНТЫ С ПОДДЕРЖКОЙ ОПТИЧЕСКОГО ЗОНДИРОВАНИЯ ДЛЯ БЫСТРЫХ РАСПРЕДЕЛЕННЫХ ИЗМЕРЕНИЙ БИОФИЗИЧЕСКИХ ПАРАМЕТРОВ | 2010 |
|
RU2577509C2 |
| СЛЕДЯЩЕЕ УСТРОЙСТВО ДЛЯ ТОКОВОЙ ЛОКАЛИЗАЦИИ | 2009 |
|
RU2527152C2 |
| СИСТЕМА И СПОСОБ КАРТОГРАФИРОВАНИЯ ДЛЯ МЕДИЦИНСКИХ ПРОЦЕДУР | 2011 |
|
RU2577760C2 |
| МЕДИЦИНСКОЕ ЗОНДОВОЕ УСТРОЙСТВО ДЛЯ УЛЬТРАЗВУКОВОЙ ВИЗУАЛИЗАЦИИ | 2016 |
|
RU2723941C2 |
| Определение и калибровка длины иглы для системы наведения иглы | 2012 |
|
RU2609203C2 |
| КАЛИБРОВКА ЖЕСТКОГО ОТОЛАРИНГОЛОГИЧЕСКОГО ИНСТРУМЕНТА | 2018 |
|
RU2771799C2 |
| ГИБКИЙ КАБЕЛЬ СО ВСТРОЕННЫМИ ДАТЧИКАМИ ДЛЯ ДИНАМИЧЕСКОГО ОТСЛЕЖИВАНИЯ ИНСТРУМЕНТА | 2011 |
|
RU2597136C2 |
| Узел иглы, включающий выровненный магнитный элемент | 2013 |
|
RU2669621C2 |
Группа изобретений относится к медицинской технике, а именно к средствам локального отслеживания и получения изображений объекта в минимально инвазивной хирургии. Устройство отслеживания и базируемой на точке обзора визуализации выполнено с возможностью извлечения в режиме реального времени волюметрических данных ультразвукового изображения для дистального наконечника инструмента удлиненной формы и окружающей анатомии, причем устройство содержит хост-систему, содержащую устройство отслеживания позиции и ориентации, выполненное с возможностью выведения позиции и направления из местоположения на дистальном наконечнике инструмента удлиненной формы, программное обеспечение формирования локального вида, включающее в себя модуль преобразования системы координат, которое выполнено с возможностью выполнения преобразования системы координат в соответствии с выведенной позицией и выведенным направлением и с возможностью формирования, из местоположения и на основании результата преобразования, локального вида, связанного с ориентацией дистального наконечника вокруг оси в выведенном направлении и который перемещается вместе с упомянутым наконечником, и пользовательский элемент управления, включающий в себя элемент управления инициализацией ориентации локального вида. При этом программное обеспечение формирования локального вида выполнено с возможностью настройки преобразования согласно вынуждаемой пользователем манипуляции элементом управления инициализацией ориентации локального вида путем согласования ориентации вокруг оси в направлении с обратной связью от средства управления направлением движения инструмента удлиненной формы. Устройство снабжено машиночитаемым носителем. Использование изобретений позволяет расширить арсенал средств для отслеживания объекта и получения при этом локального изображения. 2 н. и 13 з.п. ф-лы, 5 ил.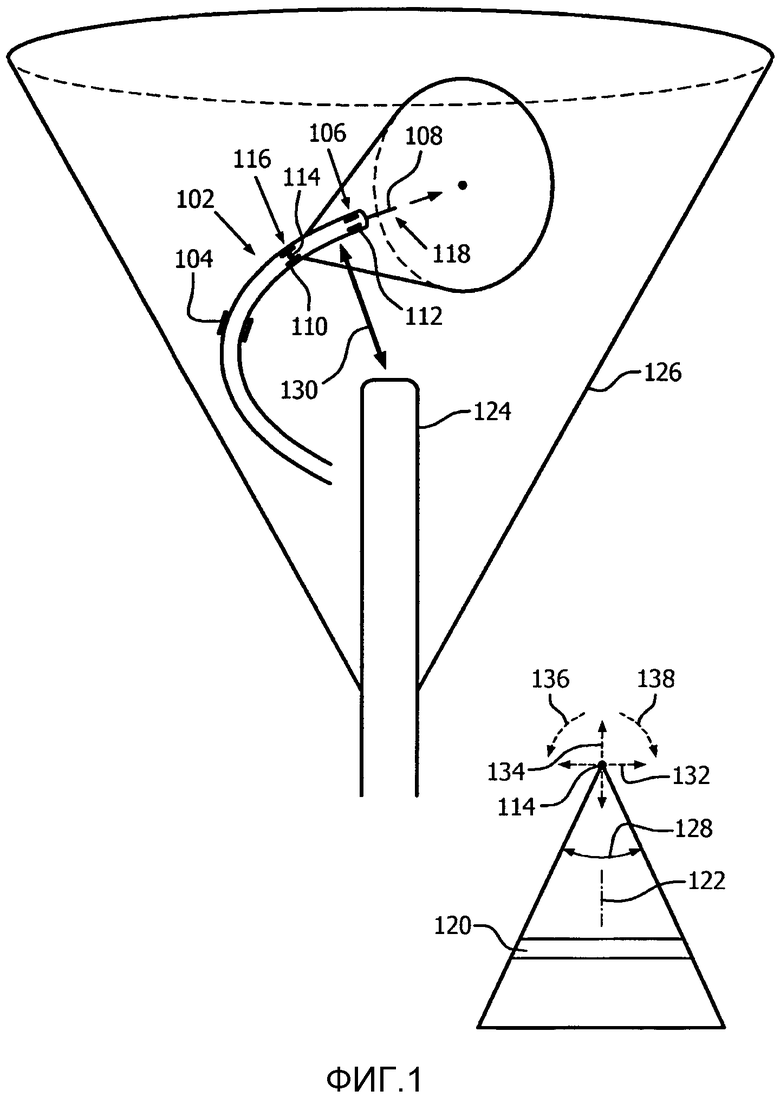
1. Устройство (300) отслеживания и базируемой на точке обзора визуализации, выполненное с возможностью извлечения в режиме реального времени волюметрических данных (126) ультразвукового изображения для дистального наконечника (106) инструмента (304) удлиненной формы и окружающей анатомии, причем устройство содержит хост-систему (302), содержащую:
- устройство (314) отслеживания позиции и ориентации, выполненное с возможностью выведения позиции (114) и направления (118) из местоположения на дистальном наконечнике инструмента (304) удлиненной формы;
- программное обеспечение (316) формирования локального вида, включающее в себя модуль (318) преобразования системы координат, которое выполнено с возможностью выполнения преобразования (130) системы координат в соответствии с выведенной позицией и выведенным направлением и с возможностью формирования, из упомянутого местоположения и на основании результата упомянутого преобразования, локального вида (120, 210), связанного с ориентацией дистального наконечника (106) вокруг оси (122) в выведенном направлении и который перемещается вместе с упомянутым наконечником; и
пользовательский элемент (322) управления, включающий в себя элемент (324) управления инициализацией ориентации локального вида;
отличающееся тем, что программное обеспечение (316) формирования локального вида выполнено с возможностью настройки упомянутого преобразования согласно вынуждаемой пользователем манипуляции элементом управления инициализацией ориентации локального вида путем согласования ориентации вокруг оси в упомянутом направлении с обратной связью от средства управления направлением движения инструмента удлиненной формы (S510-S530).
2. Устройство по п. 1, дополнительно содержащее зонд (124, 306) чреспищеводной эхокардиографии (TEE) или зонд трансторакальной эхокардиографии (TTE), выполненный с возможностью вывода информации, исходя из которой происходит упомянутое формирование.
3. Устройство по п. 1, дополнительно содержащее упомянутый инструмент (304) удлиненной формы.
4. Устройство по п. 1, в котором упомянутый дистальный наконечник (106) выполнен конкретно с возможностью манипулирования тканями тела в медицинских целях.
5. Устройство по п. 1, в котором устройство (314) отслеживания позиции и ориентации выполнено с возможностью выведения по меньшей мере одного из упомянутой позиции (114) и упомянутого направления (118) на основании множества структур (110, 112) на упомянутом дистальном наконечнике (106).
6. Устройство по п. 1, в котором хост-система (302) дополнительно содержит устройство (320) отображения, причем устройство дополнительно выполнено с возможностью отображения на упомянутом устройстве отображения и из упомянутой визуализации в реальном времени более общего вида (204, 212), который основан на волюметрических данных ультразвукового изображения и включает в себя упомянутый дистальный наконечник, но который не перемещается вместе с упомянутым дистальным наконечником.
7. Устройство по п. 6, причем устройство дополнительно выполнено с возможностью одновременного отображения:
локального вида, имеющего поле обзора (128), которое поддерживается фиксированным при перемещении, причем упомянутый локальный вид, в ином случае, поддерживается синхронным с упомянутой позицией и упомянутым направлением; и
более общего вида, который формируется из упомянутой визуализации в реальном времени.
8. Устройство по п. 1, в котором хост-система (302) дополнительно выполнена с возможностью динамического обнаружения (S422) обновления в по меньшей мере одном из упомянутой позиции и упомянутого направления и для повторения, динамически в ответ на упомянутое обнаружение обновления, упомянутого выведения посредством устройства (314) отслеживания позиции и ориентации и упомянутого выполнения и упомянутого формирования посредством модуля (318) преобразования системы координат программного обеспечения (316) формирования локального вида.
9. Устройство по п. 5, в котором упомянутое множество структур содержит эхоподобные структуры (110, 112) или преобразователи магнитного поля, расположенные на упомянутом дистальном наконечнике (106).
10. Устройство по п. 5, в котором структура из числа упомянутых структур является полостно кольцевой.
11. Устройство по п. 10, в котором упомянутая структура является радиально симметричной.
12. Устройство по п. 5, в котором устройство (314) отслеживания позиции и ориентации выполнено с возможностью выведения упомянутой ориентации из визуализации структуры в упомянутом дистальном наконечнике, причем упомянутая структура является асимметричной по окружности, чтобы содействовать ультразвуковому определению упомянутой ориентации.
13. Устройство по п. 1, в котором пользовательский элемент (322) управления дополнительно включает в себя элемент (326) управления переключением вида, выполненный с возможностью переключения (208) между упомянутым локальным видом и более общим видом, который формируется из упомянутой визуализации в реальном времени.
14. Устройство по п. 13, в котором упомянутое переключение является ответным на приведение в действие пользователем пользовательского элемента (322) управления.
15. Машиночитаемый носитель для отслеживания и базируемой на точке обзора визуализации, причем упомянутый носитель содержит программу, которая включает в себя инструкции, исполнимые процессором, чтобы выполнять множество действий, причем упомянутое множество содержит действия:
извлечения в режиме реального времени волюметрических данных (126) ультразвукового изображения для дистального наконечника (106) инструмента (304) удлиненной формы и окружающей анатомии;
выведения (S420) позиции (114) и направления (118) из местоположения на дистальном наконечнике (106) инструмента (304) удлиненной формы;
выполнения преобразования (130) системы координат в соответствии с выведенной позицией и выведенным направлением; и
формирования (S424), из упомянутого местоположения и на основании результата упомянутого преобразования, локального вида (120, 210), связанного с ориентацией дистального наконечника (106) вокруг оси (122) в выведенном направлении и который перемещается вместе с упомянутым наконечником;
отличающийся тем, что упомянутое преобразование настраивается согласно вынуждаемой пользователем манипуляции (S510) путем согласования ориентации вокруг оси в упомянутом направлении с обратной связью от средства управления направлением движения инструмента удлиненной формы (S510-S530).
| US 6016439 A, 18.01.2000 | |||
| US 2010041949 A1, 18.02.2010 | |||
| US 2005238218 A1, 27.10.2005 | |||
| US 2012046521 A1, 23.02.2012 | |||
| СПОСОБ И УСТРОЙСТВО ДЛЯ ИССЛЕДОВАНИЯ ОБЪЕКТА В РАССЕЯННОМ И/ИЛИ ПРОШЕДШЕМ ИЗЛУЧЕНИИ | 2004 |
|
RU2256169C1 |

