Изобретение относиться к области индикации токсических химических веществ в атмосфере и может быть использовано для проведения химической разведки с использованием беспилотного летательного аппарата (БпЛА).
Предлагаемое устройство направлено на достижение технического результата, заключающегося в анализе исследуемого воздуха в районе возможного заражения токсическими химическими вещес твами, контроле изменения окраски индикаторных элементов модулем распознавания цвета - детектором, основанном на анализе отраженного электромагнитного излучения оптического диапазона и передачи на микрочип для расчета хроматичности и насыщенности отраженного луча, сравнении полученных результатов с ранее заданными значениями цветовых координат. Передачи информации о распознанном цвете в виде кодированной последовательности на контроллер наземного устройства индикации по радиоканалу с использованием двух радиомодулей телеметрии посредством протокола информационного взаимодействия с беспилотными летательными аппаратами (БпЛА).
Известны конструкции устройств индикации токсических химических веществ, такие как, войсковой прибор химической разведки (ВПХР), войсковой автоматические газосигнализаторы различных модификаций (ГСА), прибор радиационной и химической разведки (ПРХР) и войсковой индивидуальный комплект химического контроля (ВИКХК).
Недостатки существующих устройств индикации токсических химических веществ:
- исследователь района заражения должен находиться вместе с устройством индикации токсических химических веществ в зоне возможного заражения, что в свое время может привести к поражению исследователя;
- требуется достаточно большое время на выдвижение в район и возращение из района возможного заражения
- после выполнения мероприятий химической разведки необходимо выполнить мероприятия дегазации не только транспорта, но и устройства индикации, а также санитарной обработки самого исследователя.
Исходя из вышеуказанных недостатков, актуальным вопросом индикации токсических химических веществ является создание мобильного устройства индикации с дистанционной передачей данных химической разведки на безопасное расстояние.
Сущность изобретения заключается в том, что при полете БпЛА через облако отравляющего вещества мелкодисперсный аэрозоль аварийно химически опасного вещества (АХОВ) или боевого токсического химического вещества (БТХВ) через сужающееся сопло попадает внутрь устройства (полезной нагрузки) и под воздействием воздушного напора распределяется по трем направлениям (направляющим), в каждом из которых установлен, перпендикулярно направлению воздушного потока индикаторный плоский элемент (ИПЭ), на исследуемый АХОВ (БТХВ), где происходит индикация и по изменению окраски определение наличия их в атмосфере. В устройстве одновременно могут использоваться три ИПЭ на различные виды АХОВ или БТХВ.
Для определения оптических параметров химической реакции в устройстве используются модули распознавания цвета - детекторы, основанные на анализе отраженного электромагнитного излучения оптического диапазона. Модули сконструированы на базе чувствительного элемента - микрочипа TCS230/TCS3200 с оптимальным расстоянием для распознавания цвета 10 мм. Принцип работы детектора основан на методе определения трех цветов. Белые светодиоды модуля распознавания цвета излучают белый свет, включающий три составляющие цвета (красный, синий, зеленый). Светодиоды необходимы для обеспечения правильного освещения микрочипа детектора. Микрочип детектора рассчитывает хроматичность и насыщенность отраженного луча и сравнивает полученные результаты с ранее заданными значениями цветовых координат. Если результаты сравнительного анализа находятся в пределах допустимых отклонений, генерируется выходной электрический сигнал определенной частоты, представлен в фигуре 1.
Микрочип должен состоять из массива фотодиодов 8×8, всего 64, из которых 16 фотодиодов имеют красный фильтр, 16 - зеленый фильтр, 16 - синий фильтр, а остальные 16 - прозрачные без фильтров. Фильтры каждого цвета распределены равномерно по всему массиву. Каждый тип фильтра может быть активирован с помощью цифровых входов S2 и S3. В фигуре 2 показана взаимосвязь между S2, S3 и типом фильтра.
На выходе модуль распознавания цвета выдает сигнал прямоугольной формы скважностью 50% с частотой, пропорциональной интенсивности цвета. Значения частот выходного сигнала детектора лежат в диапазоне от 2 Гц до 500 кГц. Для масштабирования выходной частоты со значениями 100%,
20% и 2% с целью оптимизации выходного сигнала детектора для различных частотных счетчиков и микроконтроллеров используют два программируемых выхода - SO и S1, как показано в фигуре 3.
Для более тонкой настройки выходного сигнала на соответствующий цвет используют тип 100%, для чего на цифровые входы SO, S1 подают высокий уровень сигала.
Детектор обладает разной чувствительностью к красному, зеленому и синему цветам. В результате выход RGB чистого белого не всегда равен 255. Поэтому после включения питания в течение 2 секунд требуется калибровка баланса белого. Алгоритм калибровки представлен следующей последовательностью действий:
- Поместить белую бумагу на расстоянии 10 мм от датчика и подать высокое напряжение (3.3 В) на порт светодиода, чтобы загорелась подсветка (4 ярких светодиода на корпусе детектора).
- Программа выбирает фильтры R (красный), G (зеленый) и В (синий) соответственно и измеряет соответствующие значения RGB красного, зеленого и синего цветов.
- Вычислить 3 параметра настройки, соответствующие красному, зеленому и синему и выполните автоматическую настройку баланса белого.
Детектор к бортовому контроллеру на базе Arduino Mega подключают как указано в фигуре 4.
Дополнительные два детектора подключают с общими контактами D3, D4, D5, D6 ботового контроллера.
Для определения заранее заданного цвета необходимо:
- Поместить цветной объект (тестовый индикаторный плоский элемент) на расстоянии 10 мм и подать высокое напряжение (3.3 В) на порт светодиода, чтобы загорелась подсветка (4 ярких светодиода на корпусе детектора);
- Составить программу для бортового контроллера, которая последовательно, применяя поочередно все три светофильтра, выдает три параметра R, G, В. Значения этих параметров будут находится в диапазоне от 0 до 255;
- Повторить пункт 2 не менее 100 раз, рассчитать математическое ожидание и среднеквадратическое отклонение для каждых трех цветовых параметров по формулам:

где: xξ - значение цветового параметра из диапазона [0;255]; ξ - цветовой параметр R, G или В; n - количество проведенных испытаний.
- Определить в программе значение каждого параметра для данного цвета с учетом среднеквадратического отклонения;
- Поместить любой из предыдущих объектов на расстоянии 10 мм от детектора с включенными светодиодами для распознавания цвета объекта.
Полноцветный детектор питают от постоянного напряжения 3.3 В и 5 В посредством аккумуляторной батареи, устанавливаемой в качестве модуля питания БпЛА, через понижающий преобразователь напряжения DC-DC со следующими его характеристиками:
входное напряжение 4-38 В; выходное напряжение 1.25-36 В (регулируемое); выходной ток 0-5 А (рекомендуемый ток 4.5 А); рабочая частота 180 кГц; мощность 75 Вт; рабочая температура от минус 40-85°С.
Информация о распознанном цвете в виде кодированной последовательности байт передается на контроллер наземного устройства индикации по радиоканалу с использованием двух радиомодулей телеметрии посредством протокола информационного взаимодействия с беспилотными летательными аппаратами (БпЛА) MAVLink (MicroAirVehicleLink). MAVLink распространяется под LGPL лицензией в виде модуля для Python и библиотек под различные языки, в том числе header-only C/C++ библиотеки, что обеспечивает простоту и доступность его применения для задач передачи данных с низким уровнем потерь. Базовой сущностью MAVLink является пакет, имеющий формат, представленный в фигуре 5.
Первый байт пакета (STX) - это символ начала сообщения: 0xFD для версии v2.0, 0xFE для версии v1.0, 0x55 для версии v0.9. LEN - длинна полезной нагрузки (сообщения). SEQ - содержит счетчик пакета (0-255), который выявляет потерю сообщения. SYS (System ID) - идентификатор отправляющей системы, а СОМР (Component ID) - идентификатор отправляющего компонента. MSG (Message ID) - тип сообщения, от него зависит, какие данные будут лежать в полезной нагрузке пакета. PAYLOAD - полезная нагрузка пакета, сообщение, размером от 0 до 255 байт. Два последних байта пакета - СКА и СКВ, нижний и верхний байт, соответственно, содержат контрольную сумму пакета. Библиотека MAVLink позволяет кодировать и раскодировать пакеты согласно протоколу, обрабатывая входные данные побайтово, добавляя их в буфер и собирая из них пакет приведенного в фигуре 5.
Данные радиомодули должны поддерживать двустороннее соединение в режиме full-duplexcommunicationthroughadaptive TDM и иметь физическую реализацию интерфейса асинхронной передачи данных UART (Universalasynchronousreceiver/transmitter) для обмена данными с бортовым контроллером. Мощность трансиверов. должна удовлетворять требуемой дальности применения БпЛА с учетом метеорологических условий, радиационной обстановки и рельефа местности.
Антенны для радиомодулей устанавливают исходя из следующих параметров: резонансная частота, входное сопротивление, диаграмма направленности, усиление, поляризация. Резонансная частота для данного устройства должна быть 915 МГц или 433 МГц. Волновое сопротивление антенны должно быть равно волновому сопротивлению питающего кабеля, а также выходному сопротивлению передатчика. Величина волнового сопротивления на всех участках должна быть равной 50 Ом. Антенна передающего и приемного радиомодуля должка иметь неравномерную диаграмму направленности для более выраженного направленного действия.
Радиомодуль питают от постоянного напряжения 5 В посредством аккумуляторной батареи, устанавливаемой в качестве модуля питания БпЛА и подключенной через понижающий преобразователь напряжения DC-DC.
Для корректной передачи данных устанавливают следующие параметры последовательного порта бортового контроллера и контроллера устройства индикации: baudrate 57600; databits 8; stopbit 1; paritybit NONE. Параметр baudrate меняется в зависимости от модели используемого радиомодуля. Схема работы устройства индикации БТХВ и АХОВ представлена в фигуре 6.
| название | год | авторы | номер документа |
|---|---|---|---|
| БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ МОНИТОРИНГА СОСТОЯНИЯ КРИОГЕННОГО ОБОРУДОВАНИЯ | 2023 |
|
RU2812373C1 |
| БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ С ТЕЛЕМЕТРИЧЕСКИМ МОДУЛЕМ | 2023 |
|
RU2813380C1 |
| Беспилотный летательный аппарат самолетного типа для обнаружения пропавшего человека | 2019 |
|
RU2723201C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ АВТОНОМНОЙ ПОСАДКИ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2022 |
|
RU2792974C1 |
| СПОСОБ АВТОНОМНОЙ ПОСАДКИ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2022 |
|
RU2785076C1 |
| Модульный беспилотный летательный аппарат с системой защиты тяговых винтов | 2020 |
|
RU2752110C1 |
| СПОСОБ МОНИТОРИНГА ВОЗДУШНОГО ПРОСТРАНСТВА В ЗОНАХ РАСПРОСТРАНЕНИЯ ОБЛАКОВ ВУЛКАНИЧЕСКОГО ПЕПЛА | 2015 |
|
RU2650850C2 |
| УСТРОЙСТВО ДЛЯ ПРИГОТОВЛЕНИЯ НАПИТКА С РАСПОЗНАВАНИЕМ КАПСУЛЫ | 2018 |
|
RU2773110C2 |
| Пилотажно-навигационная система транспортного летательного аппарата | 2024 |
|
RU2822088C1 |
| РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС ТЕХНИЧЕСКОЙ РАЗВЕДКИ | 2021 |
|
RU2783879C1 |


Изобретение относится к области индикации токсических химических веществ в атмосфере и может быть использовано для проведения химической разведки с использованием беспилотного летательного аппарата (БпЛА). Технический результат заключается в обеспечении оперативного определения наличия и концентрации АХОВ и БТХВ в зараженном районе или объекте в реальном времени и без контакта исследователя с зараженными объектами. Сущность: устройство определения токсических химических веществ содержит в себе три индикаторных элемента на БТХВ или АХОВ, модуль распознавания цвета - детекторы, основанные на анализе отраженного электромагнитного излучения оптического диапазона, светодиоды, необходимые для обеспечения правильного освещения микрочипа детектора, микрочип детектора рассчитывает хроматичность и насыщенность отраженного луча и сравнивает полученные результаты с ранее заданными значениями цветовых координат, при этом информация о распознанном цвете в виде кодированной последовательности передается на контроллер наземного устройства индикации по радиоканалу с использованием двух радиомодулей телеметрии посредством протокола информационного взаимодействия с беспилотными летательными аппаратами (БпЛА), при этом данная информация о наличии и концентрации токсичных химических веществ в реальном времени передается оператору, находящемуся на удалении от зараженного района или объекта. 6 ил.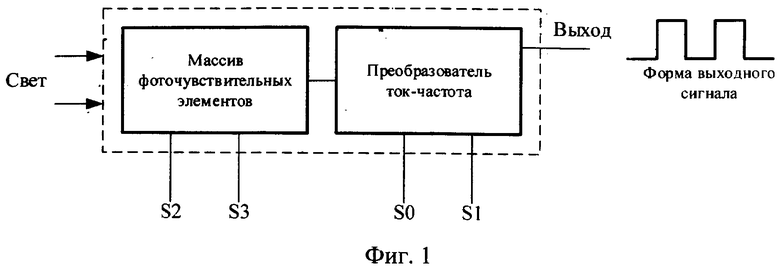
Устройство определения токсических химических веществ содержит в себе три индикаторных элемента на боевое токсическое химическое вещество (БТХВ) или аварийно химически опасное вещество (АХОВ), модуль распознавания цвета - детекторы, основанные на анализе отраженного электромагнитного излучения оптического диапазона, светодиоды, необходимые для обеспечения правильного освещения микрочипа детектора, микрочип детектора рассчитывает хроматичность и насыщенность отраженного луча и сравнивает полученные результаты с ранее заданными значениями цветовых координат, при этом информация о распознанном цвете в виде кодированной последовательности передается на контроллер наземного устройства индикации по радиоканалу с использованием двух радиомодулей телеметрии посредством протокола информационного взаимодействия с беспилотными летательными аппаратами (БпЛА), при этом данная информация о наличии и концентрации токсичных химических веществ в реальном времени передается оператору, находящемуся на удалении от зараженного района или объекта.
| БЕСПИЛОТНЫЙ КОМПЛЕКС ХИМИЧЕСКОЙ РАЗВЕДКИ ГРУНТА | 2020 |
|
RU2766308C1 |
| СПОСОБ ИЗМЕРЕНИЯ И/ИЛИ КОЛИЧЕСТВЕННОГО ВЫРАЖЕНИЯ КАЧЕСТВА ЦВЕТА В КОДАХ И/ИЛИ ЦИФРОВЫХ СИГНАЛАХ И СИСТЕМА ИЗМЕРЕНИЯ И/ИЛИ КОЛИЧЕСТВЕННОГО ВЫРАЖЕНИЯ КАЧЕСТВА ЦВЕТА ОКРАШЕННЫХ ОБЪЕКТОВ | 1993 |
|
RU2075772C1 |
| УСТРОЙСТВО ДЛЯ ВОЛНОВОДНО-РЕЗОНАНСНОГО РЕНТГЕНОФЛУОРЕСЦЕНТНОГО ЭЛЕМЕНТНОГО АНАЛИЗА | 2019 |
|
RU2706445C1 |
| AU 2017204250 A1, 13.07.2017 | |||
| EP 3726179 A1, 21.10.2020. | |||

