Изобретение относится к аналитической химии, а именно к измерительным устройствам, оснащенным беспилотным летательным аппаратом, позволяющим дистанционно идентифицировать и количественно определять в грунте летучие вещества различной природы, в том числе отравляющие.
Известны устройства наземной химической разведки, предназначенные для определения в воздухе, на местности и на технике отравляющих веществ [Юртушкин В.И. Чрезвычайные ситуации: защита населения и территорий: учеб. пособие для воен. каф. хим. и хим.-технол. вузов Рос. Федерации / В.И. Юртушкин. - М.: Кнорус, 2008. - 362 с.].
Принцип действия наиболее распространенного современного прибора войсковой химической разведки основан на прокачивании через индикаторные трубки анализируемого воздуха. При наличии отравляющих веществ происходит изменение окраски наполнителя трубок, по которому приблизительно определяют концентрацию отравляющих веществ.
В патентах [Murray George М. et al. Polymer based lanthanide luminescent sensors for the detection of organophosphorous compounds. Patent US 20050019218, 2005; Гришин B.B. и др. Устройство для определения в воздухе химических веществ, химический сенсор и способ его изготовления. Патент РФ 2377558, 2009] представлены измерительные устройства на основе единичных селективных пьезосенсоров для измерения индивидуальных отравляющих веществ в воздухе.
К основным недостаткам рассматриваемых устройств наземной химической разведки для полуколичественного и точного анализа отравляющих веществ в объектах окружающей среды относятся: ограниченные размеры районов, которые могут быть охвачены средствами разведки; длительное время на проведение анализа и обработку информации; невозможность ведения химической разведки в районах, занятых противником; привлечением транспортных средствах и личного состава и, как следствие возможность отравления личного состава, проводящего разведку; необходимость отдельных датчиков (индикаторных трубок, сенсоров) для определения индивидуальных отравляющих веществ.
Наиболее близким к заявленному устройству является газоанализатор на основе полупроводниковых сенсоров, размещенный на борту беспилотного летательного аппарата мультироторного типа и предназначенный для идентификации двухсот химических соединений в воздухе на различном расстоянии от земной поверхности (от 2 до 15 м) [Болясов Д.А., Эль-Салим С.З., Черемисина О.В. Применение БпЛА для решения задач дистанционного контроля. Режим доступа: http://rl-omega.ru/docs/Phantom_Gas.pdf].
Газоанализатор включает: модуль газового анализа, модуль связи с оператором, аналитическую камеру, модуль управления питанием газоанализатора, устройство отбора проб. К беспилотному летательному аппарату мультироторного типа газоанализатор крепится с помощью мягкой подвески, снижающей влияние вибрации.
Основным недостатком этого устройства является то, что химический анализ загрязнения местности проводится по содержанию веществ в воздухе, тогда как боевые отравляющие вещества переносятся воздушными потоками на значительные расстояния и накапливаются в низинах, над поверхностью грунтов, проникают вглубь, отравляя подземные воды, или, напротив, под воздействием определенных природных условий испаряются из грунтов, вторично загрязняя воздух [Хисматуллина А.Ф., Гасилов B.C., Чижова М.А., Хайруллина Л.И. Влияние метеорологических условий на распространение токсичных веществ в окружающем пространстве // Вестник технологического университета. - 2017. - Т. 20. - №12. - С. 152-157. Режим доступа: http://Users/user/Downloads/vliyanie-meteorologicheskih-usloviy-na-rasprostranenie-toksichnyh-veschestv-v-okruzhayuschem-prostranstve.pdf]. Анализ грунтов невозможен из-за неустойчивости стандартных беспилотных летательных аппаратов мультироторного типа, подлежащих оснащению газоанализатором. Кроме того, используемые в газоанализаторе чувствительные элементы на основе полупроводниковых адсорбционных сенсоров чувствительны к вибрации, что снижает точность измерения отравляющих веществ в воздухе; они характеризуются высоким потреблением энергии, что сокращает время их непрерывной работы и уменьшает радиус проведения химической разведки; требуют длительного времени для восстановления после сорбции отравляющих веществ или замены на аналогичные в случае хемосорбции газочувствительного слоя с определяемым соединением; для проведения измерения и регенерации сенсоров необходимы дополнительные устройства (пробоотборник, регенератор), при этом измерительный модуль имеет большую массу, что усложняет его воздушное транспортирование.
Технической задачей изобретения является создание беспилотного комплекса для проведения дистанционной химической разведки с целью определения отравляющих веществ в грунтах, оснащенного беспилотным летательным аппаратом мультироторного типа с повышенной устойчивостью, за счет установки телескопических стоек изменяемой длинны и оборудованных датчиками контакта с опорной поверхностью места приземления. При этом телескопические опорные стойки оборудованы реверсными электродвигателями, выдвигающими штоки при посадке на неровную поверхность анализируемого грунта с целью обеспечения горизонтального положения и предотвращения опрокидывания беспилотного летательного аппарата мультироторного типа. Чувствительные элементы газоанализатора должны характеризоваться устойчивостью к вибрации для повышения точности измерений концентрации отравляющих веществ в грунте; малыми энергопотреблением и временем саморегенерации для обеспечения многократно повторяющихся измерений и расширения радиуса проведения дистанционной химической разведки за однократное применение беспилотного летательного аппарата; обеспечивать проведение анализа пробы «на месте» и регенерацию сенсоров без использования дополнительных модулей; а также малой массой для снижения веса полезной нагрузки беспилотного летательного аппарата мультироторного типа. Конструкция крепления газоанализатора к беспилотному летательному аппарату мультироторного типа должна обеспечивать его спуск, подъем и плотное прилегание к грунту при анализе.
Техническая задача достигается тем, что беспилотный комплекс дистанционной химической разведки грунта, содержащий беспилотный летательный аппарат мультироторного типа; видеокамеру, связанную с пультом управления оператора; газоанализатор на основе сенсоров для определения различных типов отравляющих веществ и включающий аналитический модуль; модуль связи с оператором; аналитическую камеру, модуль питания газоанализатора; модули для считывания информации и управления питанием газоанализатора. При этом беспилотный летательный аппарат мультироторного типа дополнительно оснащается телескопическими опорными стойками, оборудованными датчиками контакта с поверхностью места приземления и устройством выдвижения штоков, позволяющим производить в автоматическом режиме удлинение опорных стоек при посадке на неровную поверхность анализируемого грунта, а газоанализатор содержит сенсоры пьезосорбционного типа, устойчивые к вибрации и характеризующиеся малым энергопотреблением и быстрой саморегенерацией; аналитическую камеру открытого типа (без дна) с заостренными краями для плотного прилегания к грунту при проведении анализа «на месте»; крепление корпуса газоанализатора к беспилотному летательному аппарату, обеспечивающее спуск газоанализатора на поверхность грунта и подъем после проведения анализа.
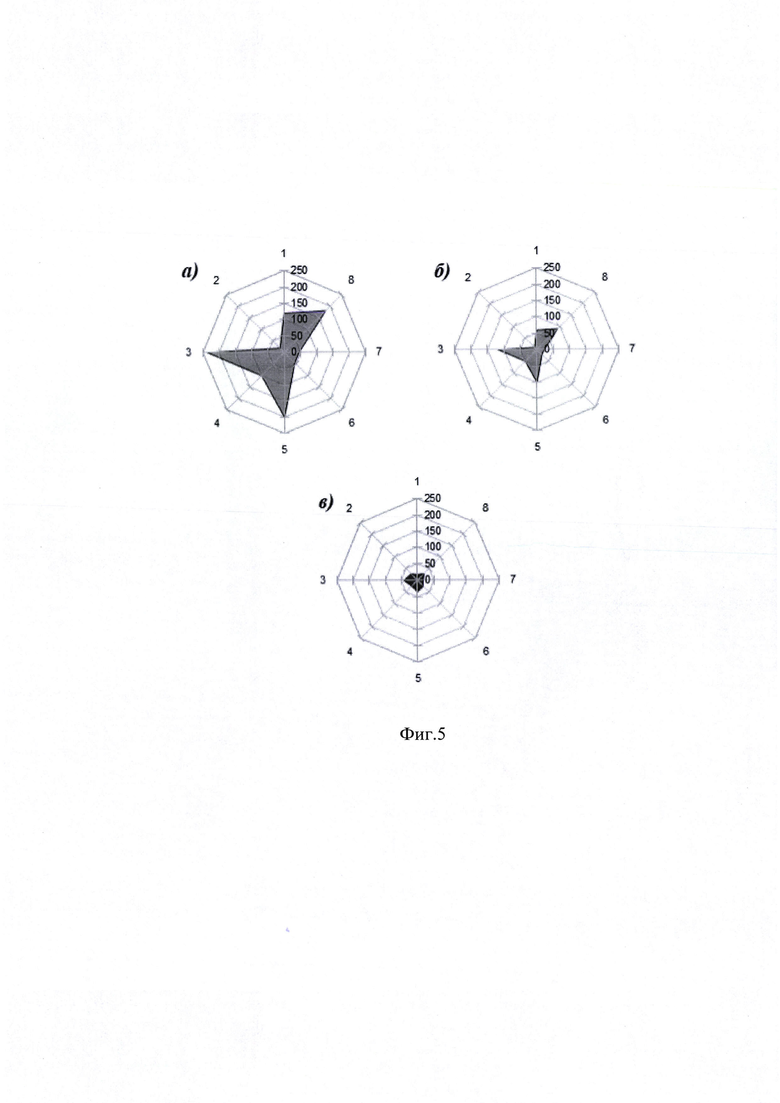
Заявленное устройство изображено на фиг. 1 - беспилотный комплекс химической разведки грунта (вид с боку), на фиг. 2 - телескопическая опорная стойка, на фиг. 3 - телескопическая устройство спуска и подъема газоанализатора, на фиг. 4 - газоанализатор, на фиг. 5 приведен пример визуальных отпечатков сорбции хлорсодержащего отравляющего вещества в грунте, на восьми разнородных пьезосенсорах 1-8.
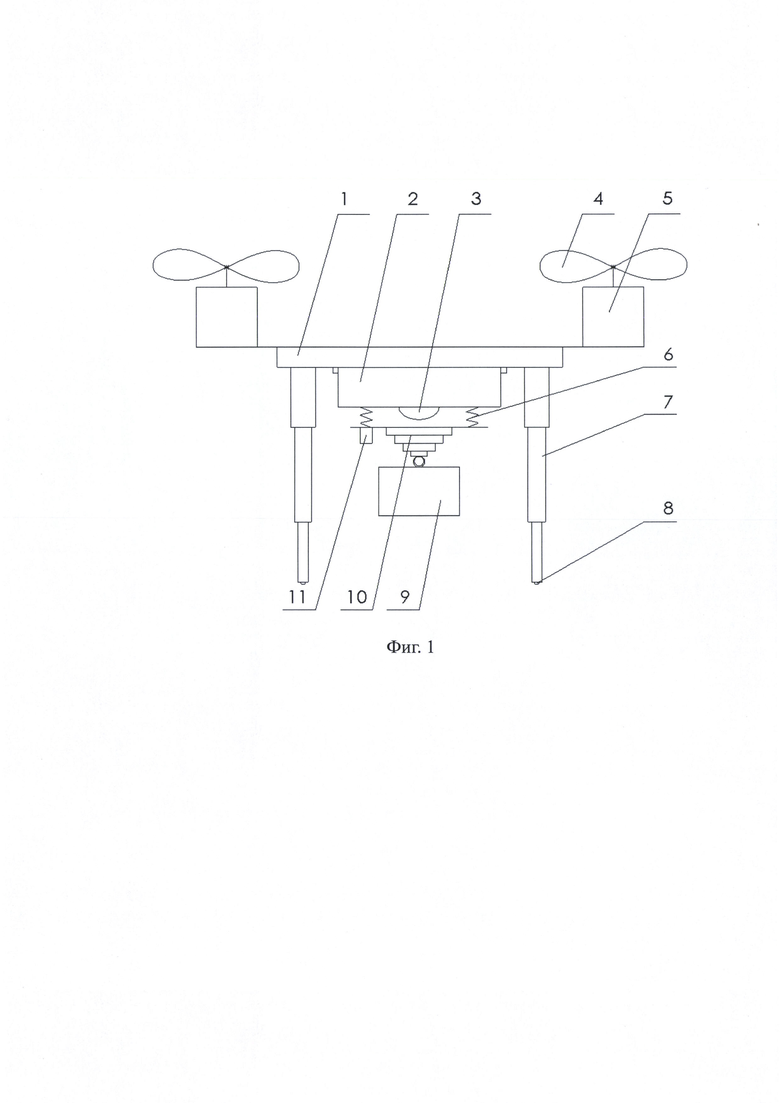
На фиг. 1 изображен беспилотный комплекс дистанционной химической разведки грунта, который включает следующие элементы: беспилотный летательный аппарат мультироторного типа 1, блок управления 2, датчик контакта газоанализатора с опорной поверхностью 3, воздушный винт 4, двигатель 5, демпфирующее устройство газоанализатора 6, телескопические опорные стойки 7, датчик контакта стойки с опорной поверхностью 8, газоанализатор 9, телескопическое устройство спуска и подъема газоанализатора 10, видеокамеру контроля посадки 11.
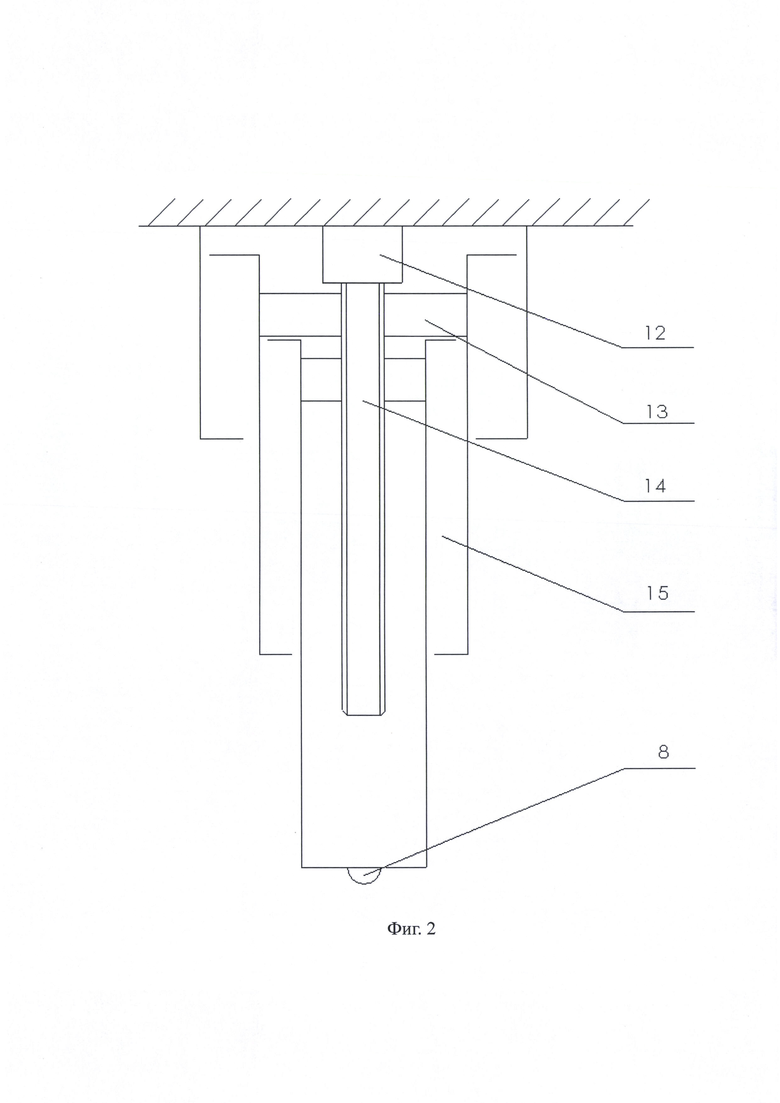
На фиг. 2 изображена схема телескопической опорной стойки, содержащей: датчик контакта стойки с опорной поверхностью 8, реверсивный электродвигатель 12, гайку штоков телескопической опорной стойки 13, винт выдвижения штоков телескопической опорной стойки 14, шток телескопической опорной стойки 15.
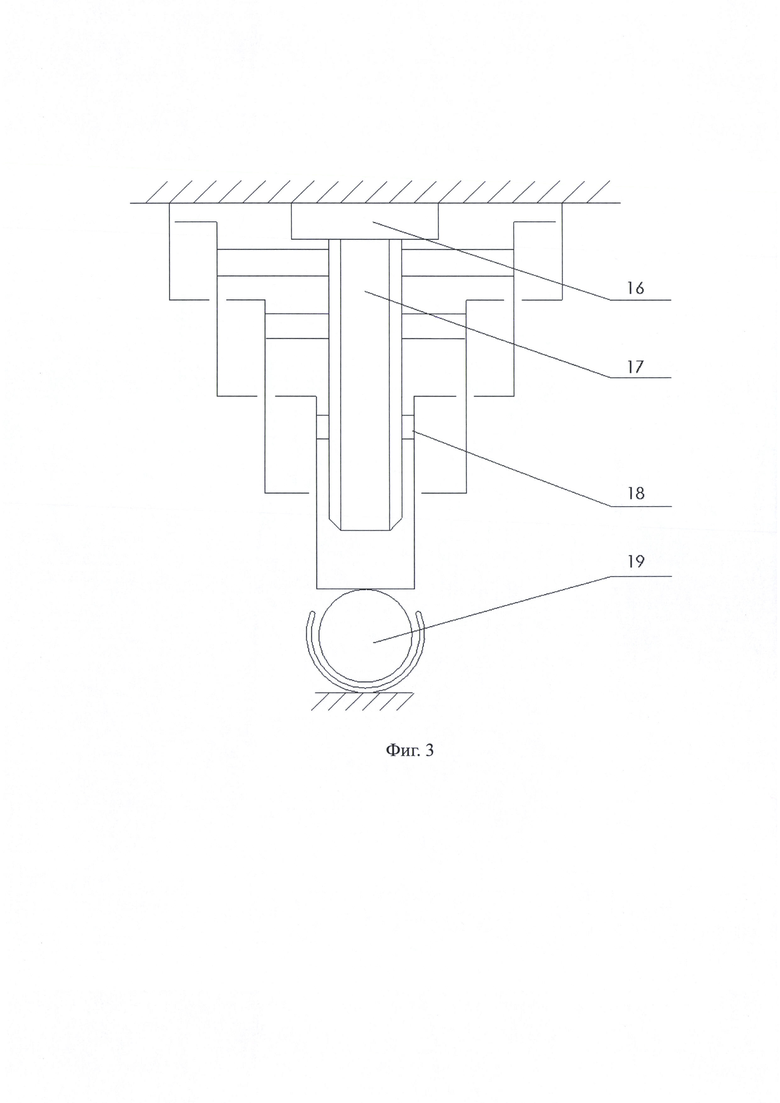
На фиг. 3 изображена схема устройства спуска и подъема газоанализатора, включающего: реверсивный двигатель выдвижения штоков 16, винт выдвижения штоков телескопического устройства спуска и подъема газоанализатора 17, гайку штока устройства спуска и подъема газоанализатора 18, шаровой шарнир крепления газоанализатора 19.
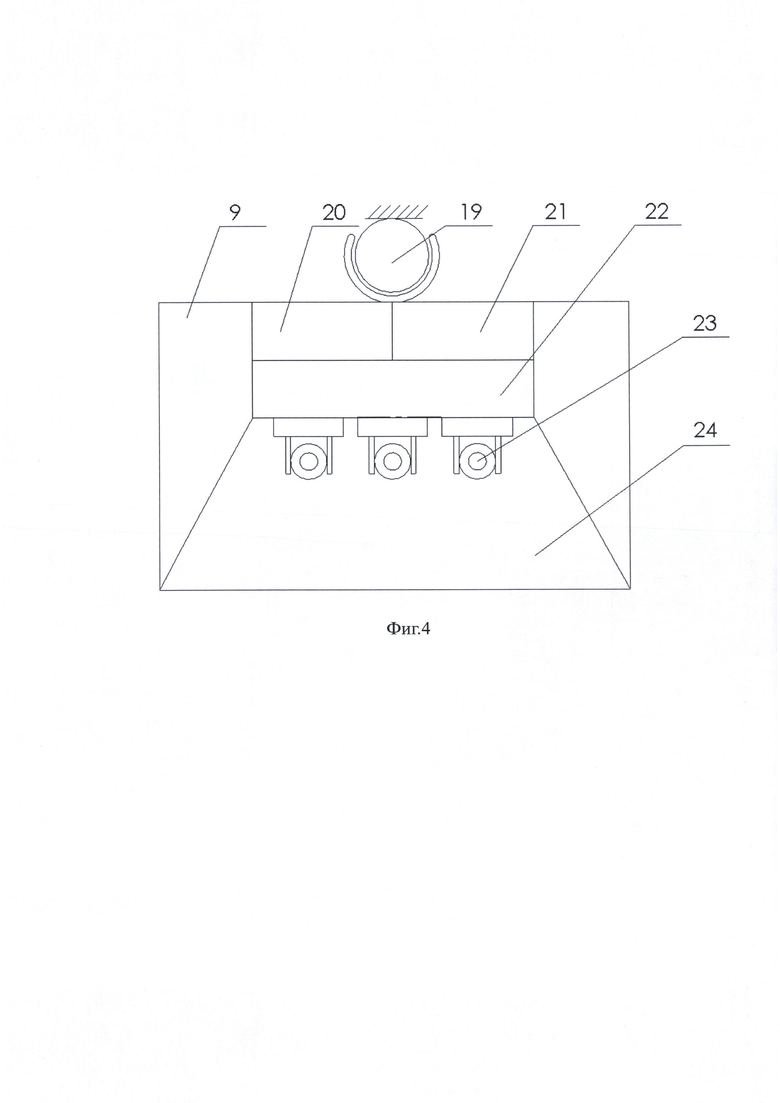
На фиг. 4 изображена схема устройства газоанализатора, содержащего: корпус газоанализатора 9, шаровой шарнир 19, блок управления 20, блок питания 21, аналитический модуль 22, пьезосенсоры 23, аналитическую камеру 24.
На фиг. 5 приведен пример диаграмм сорбции на восьми разнородных пьзосенсорах хлорсодержащего отравляющего вещества в грунте: а) эталонная диаграмма сорбции хлорсодержащего отравляющего вещества с концентрацией его в грунте 0,3 мг/кг, б) диаграмма сорбции хлорсодержащего отравляющего вещества в грунте в реальных условиях, в) диаграмма сорбции естественных газов грунта, незагрязненной хлорсодержащим отравляющим веществом.
Беспилотный комплекс дистанционной химической разведки грунта содержит: беспилотный летательный аппарат мультироторного типа 1 с присоединенным к нижней части блоком управления 2 и расположенными по краям двигателями 5 с воздушными винтами 4. Снизу на беспилотный летательный аппарат 1 установлены: датчик контакта газоанализатора с опорной поверхностью 3 и демпфирующее устройство 6, на которое крепится телескопическое устройство спуска и подъема 10, опускающее газоанализатор 9 до тех пор, пока не активируется датчик 3. Внизу устройства спуска и подъема 10 на шаровом шарнире 19 закреплен корпус газоанализатора 9, в котором размещены аналитический модуль 22, блок питания газоанализатора 21, модуль связи с оператором, модуль считывания информации и управления питанием газоанализатора, объединенные в блоке управления 20, аналитическая камера 24, выполненная без дна и с заостренными краями для обеспечения плотного прилегания к грунту. В верхней части аналитической камеры 24 закреплены пьезосенсоры 23, соединенные с аналитическим модулем 22. С целью снижения веса полезной нагрузки возможно запитывание газоанализатора 9 электроэнергией от беспилотного летательного аппарата мультироторного типа 1 и использование его блока управления 2 для снятия данных с аналитического модуля 22 и передачи их оператору. Для обеспечения устойчивости и горизонтирования при посадке беспилотный летательный аппарат мультироторного типа 1 оснащается телескопическими опорными стойками 7, оборудованными датчиками контакта с опорной поверхностью 8.
Аналитическая информация при детектировании грунта передается посредством известных способов беспроводной передачи данных оператору на пульт управления в режиме времени, близком к реальному, где визуализируется с помощью диаграмм, а затем идентифицируется по геометрии диаграмм и количественно определяется по площади диаграмм, например, как указано в патенте [Пат. РФ №2279065 Способ обработки сигналов мультисесорного газоанализатора типа «Электронный нос» / Кучменко Т.А., 2006].
На фиг. 5 приведен пример диаграмм сорбции на восьми разнородных пьезосенсорах хлорсодержащего отравляющего вещества в грунте: а) эталонная диаграмма сорбции хлорсодержащего отравляющего вещества с концентрацией его в грунте 0,3 мг/кг, б) диаграмма сорбции хлорсодержащего отравляющего вещества в грунте в реальных условиях, в) диаграмма сорбции естественных газов грунта, незагрязненного хлорсодержащим отравляющим веществом.
Беспилотный комплекс дистанционной химической разведки грунта функционирует следующим образом: оператор производит внешний осмотр устройства, включает пульт управления и беспилотный летательный аппарат мультироторного типа 1, проверяет степень заряженности батареи, производит калибровку навигационного оборудования и видеокамеры 11, устанавливает пьезосенсоры 23 в аналитическую камеру 24, включает газоанализатор 9 и проверяет уровень заряженности его аккумулятора, правильность работы сенсоров 23 по их начальной частоте колебания. Оператор с помощью устройства 19 прикрепляет корпус газоанализатора 9 к беспилотному летательному аппарату мультироторного типа 1. Проверяет исправность шарнира 19 и правильность работы устройства спуска и подъема газоанализатора 10. Затем оператор закладывает маршрут полета в систему автоматического управления и отправляет устройство в пункт назначения. Посадка беспилотного летательного аппарата 1 производится следующим образом: беспилотный летательный аппарат 1 переходит в режим полета с удержанием горизонта и плавно снижается до контакта хотя бы одной стойки 7 с опорной поверхностью, при этом срабатывает датчик контакта 8, подающий сигнал в блок управления 2. Затем беспилотный летательный аппарат фиксирует высоту и выдвигает оставшиеся стойки 7 до срабатывания их датчиков контакта с опорной поверхностью 8. Выдвижение стоек происходит за счет работы реверсивного электродвигателя 12, приводящего во вращение винт выдвижения штоков 14, который, в свою очередь, воздействует на гайки 13, жестко соединенные со штоками 15 телескопической опорной стойки. Для предотвращения прокручивания штоков относительно друг друга они оборудуются направляющими (например, шлицами). Устройство спуска и подъема газоанализатора 10 работает аналогичным образом. При помощи камеры 11 оператор контролирует процесс посадки. После приземления беспилотного летательного аппарата оператор с помощью устройства спуска и подъема 10 которое работает аналогично телескопической опорной стойке устанавливает газоанализатор 9 на поверхности, контролируя его установку по срабатыванию датчика контакта газоанализатора с опорной поверхностью 3. При наличии в грунте отравляющих веществ их пары адсорбируются на разнородных сорбционных покрытиях пьезосенсоров 23, при этом снижается частота колебаний пьезосенсоров 23, что по средствам известных способов беспроводной передачи данных передается оператору на пульт управления, где с помощью стандартного офисного программного обеспечения аналитический сигнал визуализируются в диаграммы, как указано в патенте [Пат. РФ №2279065 Способ обработки сигналов мультисесорного газоанализатора типа «Электронный нос» / Кучменко Т.А., 2006]. Пример визуализации сорбции хлорсодержащих отравляющих веществ представлен на фиг. 5а, 5б.
По геометрии диаграммы с помощью программы сравнения с эталонными образцами идентифицируется отравляющее вещество в грунте (фиг. 5а, 5б) или устанавливается отсутствие отравляющих веществ (фиг. 5в). По площади диаграммы устанавливается концентрация отравляющего вещества в грунте. Например, при сорбции хлорсодержащего отравляющего вещества в реальных условиях площадь диаграммы на фиг. 5б меньше площади эталонной диаграммы на фиг. 5а в 1,9 раза, что позволяет сделать вывод о концентрации отравляющего вещества в исследуемом грунте, равной 0,15 мг/кг. После чего по команде оператора с помощью устройства спуска и подъема 10 газоанализатор 9 поднимается с поверхности грунта непосредственно перед взлетом. Затем беспилотный летательный аппарат мультироторного типа 1 перемещается в следующий пункт назначения. Последовательность проведения измерения концентрации в грунте отравляющих веществ повторяется вышеописанным методом. Восстановление базовой частоты пьезосенсоров 23 происходит самопроизвольно между перелетами беспилотного летательного аппарата мультироторного типа от одного пункта назначения к другому. Воздушные потоки, создаваемые винтами 4 беспилотного летательного аппарата мультироторного типа 1 и встречными потоками воздуха, ускоряют процесс десорбции. Время самовосстановления пьезосенсоров 23 не превышает 3 мин.
Изготовление устройства возможно из узлов и агрегатов, серийно выпускаемых промышленностью.
| название | год | авторы | номер документа |
|---|---|---|---|
| Беспилотный летательный аппарат для определения содержания питательных веществ растений в почве | 2024 |
|
RU2827242C1 |
| СПОСОБ ПАРАШЮТНОЙ ПОСАДКИ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА И БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ С ЭЛЕКТРОДВИЖИТЕЛЕМ И ПАРАШЮТНОЙ СИСТЕМОЙ ПОСАДКИ | 2014 |
|
RU2592963C2 |
| БЕСПИЛОТНЫЙ МЕДИЦИНСКИЙ КОМПЛЕКС | 2019 |
|
RU2726390C2 |
| РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС ТЕХНИЧЕСКОЙ РАЗВЕДКИ | 2023 |
|
RU2813930C2 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ТОКСИЧЕСКИХ ХИМИЧЕСКИХ ВЕЩЕСТВ | 2022 |
|
RU2795996C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УТЕЧЕК ВЗРЫВООПАСНЫХ ЖИДКОСТЕЙ НА ОСНОВЕ ПЬЕЗОСЕНСОРА | 2014 |
|
RU2568331C1 |
| ПРОБООТБОРНИК ГРУНТА ДЛЯ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА ВЕРТОЛЁТНОГО ТИПА | 2022 |
|
RU2790164C1 |
| СПОСОБ ОТБОРА ПРОБ ВОДЫ БАТОМЕТРОМ С ИСПОЛЬЗОВАНИЕМ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА ВЕРТОЛЁТНОГО ТИПА | 2021 |
|
RU2756332C1 |
| ТЕРМОЭЛЕКТРИЧЕСКАЯ ГЕНЕРАТОРНАЯ УСТАНОВКА ДЛЯ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2022 |
|
RU2788970C1 |
| Многофункциональный робототехнический комплекс для мониторинга технического состояния, окружающего пространства и проведения технического обслуживания крупногабаритного объекта в сооружении | 2021 |
|
RU2776474C1 |
Изобретение относится к аналитической химии, а именно к измерительным устройствам, оснащенным беспилотным летательным аппаратом (БПЛА), позволяющим дистанционно идентифицировать и количественно определять в грунте летучие вещества различной природы, в том числе отравляющие. Беспилотный комплекс содержит БПЛА мультироторного типа, видеокамеру, связанную с пультом управления оператора, газоанализатор, модуль связи с оператором, аналитическую камеру, модуль питания газоанализатора, модули для считывания информации и управления питанием газоанализатора. БПЛА дополнительно оснащается телескопическими опорными стойками, оборудованными датчиками контакта с поверхностью места приземления и устройством выдвижения штоков, позволяющим производить в автоматическом режиме удлинение опорных стоек при посадке на неровную поверхность анализируемого грунта. Газоанализатор содержит сенсоры пьезосорбционного типа, устойчивые к вибрации, аналитическую камеру открытого типа с заостренными краями для плотного прилегания к грунту. Повышается точность измерений концентрации отравляющих веществ в грунте. 5 ил.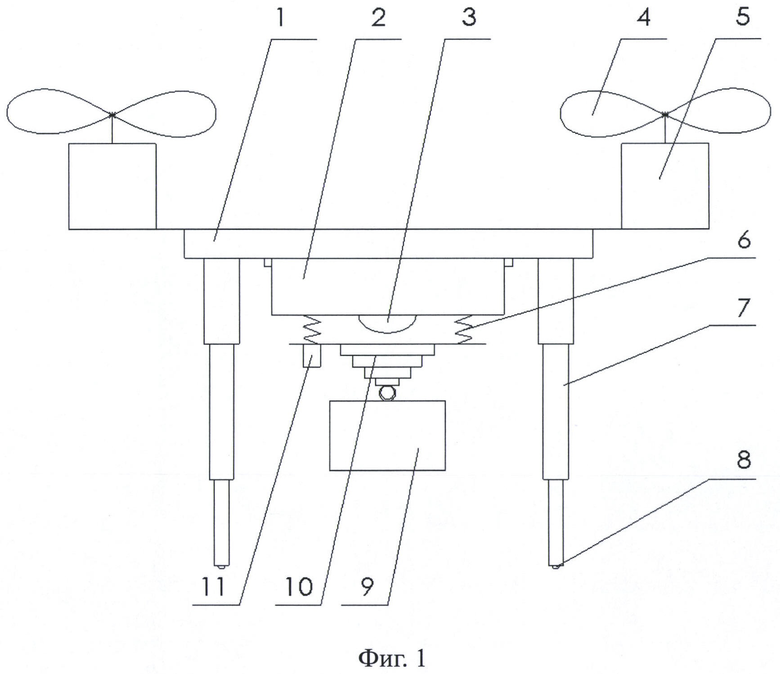
Беспилотный комплекс химической разведки грунта, содержащий беспилотный летательный аппарат мультироторного типа, газоанализатор, модуль связи с оператором, модуль питания газоанализатора, модуль считывания информации, видеокамеру, отличающийся тем, что дополнительно оснащен телескопическими опорными стойками с возможностью их автоматического удлинения, телескопическим устройством спуска и подъема газоанализатора, при этом газоанализатор пьзосенсорного типа содержит открытую аналитическую камеру с заостренными краями.
| Беспилотный летательный аппарат самолетного типа для обнаружения пропавшего человека | 2019 |
|
RU2723201C1 |
| Комплекс беспилотных летательных средств на базе аэростатического летательного аппарата | 2018 |
|
RU2681966C1 |
| АВТОМАТ ДЛЯ ДУГОВОЙ НАПЛАВКИ ЛЕНТОЧНЫМ ЗЛЕКТРОДОМ | 0 |
|
SU197822A1 |
| US 20190033441 A1, 31.01.2019 | |||
| EP 0003293115 A1, 14.03.2018 | |||
| CN 107941988 A, 20.04.2018. | |||

