Изобретение относится к беспилотной легкобронированной технике и предназначено для проведения технической разведки, обнаружения и определения степени повреждения образцов вооружения и военной специальной техники (ВВСТ), ведения инженерной разведки местности, обеспечения ремонта, подвоза запасных частей и материалов к требующей ремонта технике, для эвакуации раненных членов экипажа с поля боя и других боевых задач.
Известна боевая система (Патент на изобретение RU 2 686 983 С2 опубл. 2019.05.06), содержащая: роботизированную платформу, функциональный модуль, бортовую систему управления с навигационной аппаратурой, систему технического зрения, пульт дистанционного управления, радиоканал управления, средства доставки, бортовую систему управления и передачи информации, бортовой дизель-генератор, бортовой комплекс аудиовидеосредств, модуль стрелково-гранатометного вооружения, оснащенный средствами разведки, дополнительное оборудование в составе комплекса маскировочных средств, технологический пульт управления, зарядное устройство. Обеспечивается ведение войсковой и артиллерийской разведки, огневая поддержка войсковых подразделений, выполнение операций во всем диапазоне естественных освещенностей в дневных и ночных условиях
Недостаток заключается в том, что боевая система не оснащена беспилотным летательным аппаратом (БПЛА) для воздушной разведки местности.
Наиболее близким аналогом к заявленному предложению, является роботизированный диагностический комплекс технической разведки по патенту на изобретение RU №2018127118 (опубликовано 23.07.2018 г.), который содержит: легкобронированный кевларовый корпус, аккумуляторную батарею, дизель-генератор, пульт дистанционного управления, танковый пулемет с электроспуском, гидропривод с грузозахватным устройством и манипулятором, блок управления телекоммуникационными устройствами, укладочный ящик с комплектом инструмента, мини-квадрокоптер, а на корпусе в подвижном видеоблоке панорамно расположены четыре видеокамеры. Изобретение обеспечивает рекогносцировку района с отказавшими образцами артиллерийского вооружения, выработку решения на способ их эвакуации.
Недостатками данного изобретения являются следующее:
усложнение конструкции машины и низкая надежность обусловленное наличием гидропривода манипулятора;
отсутствие возможности обнаружения мин и других взрывчатых устройств;
отсутствие дуплексной связи БПЛА с РКТР, не позволяющей осуществлять посадку его обратно в нишу кевларового корпуса РКТР, а также двигаться по проложенному им маршруту;
отсутствие возможности обеспечения подзарядки БПЛА внутри РКТР;
отсутствие возможности автоматизированного распознавания препятствий с целью выработки оптимального маршрута.
Техническим результатом изобретения является упрощение конструкции РКТР и повышение его надежности, обеспечение возможности обнаружения мин и других взрывчатых устройств, реализации дуплексной связи БПЛА с РКТР и подзарядки БПЛА, обеспечение возможности автоматизированного распознавания препятствий.
Технический результат достигается за счет:
установки на манипулятор РКТР актуаторов линейного привода;
установки устройства для обнаружения мин и других взрывчатых устройств;
установки дуплексной связи БПЛА с РКТР;
обеспечения подзарядки БПЛА;
установки автоматизированной системы распознавания препятствий.
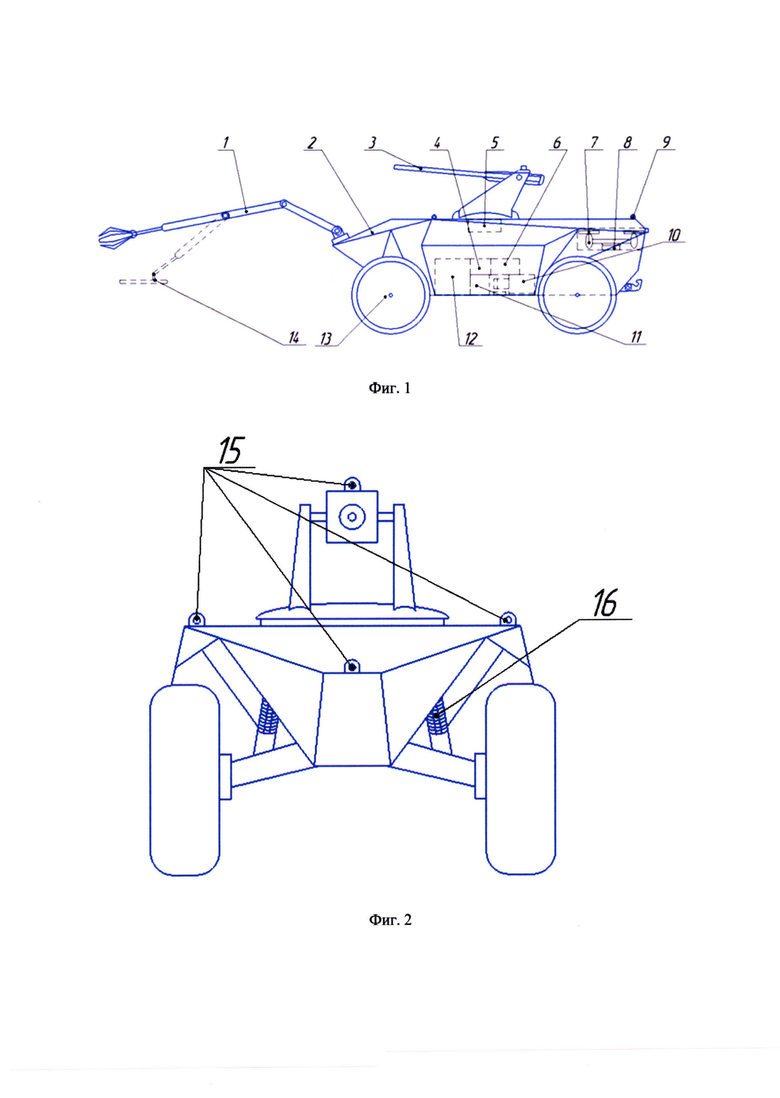
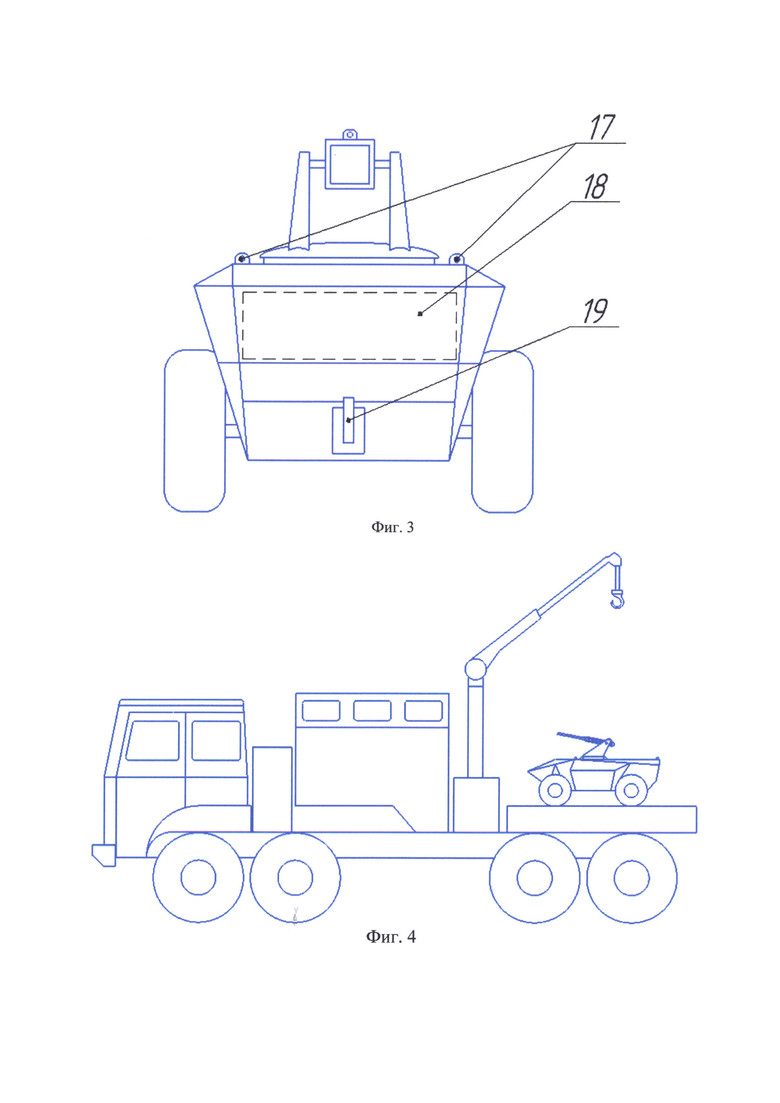
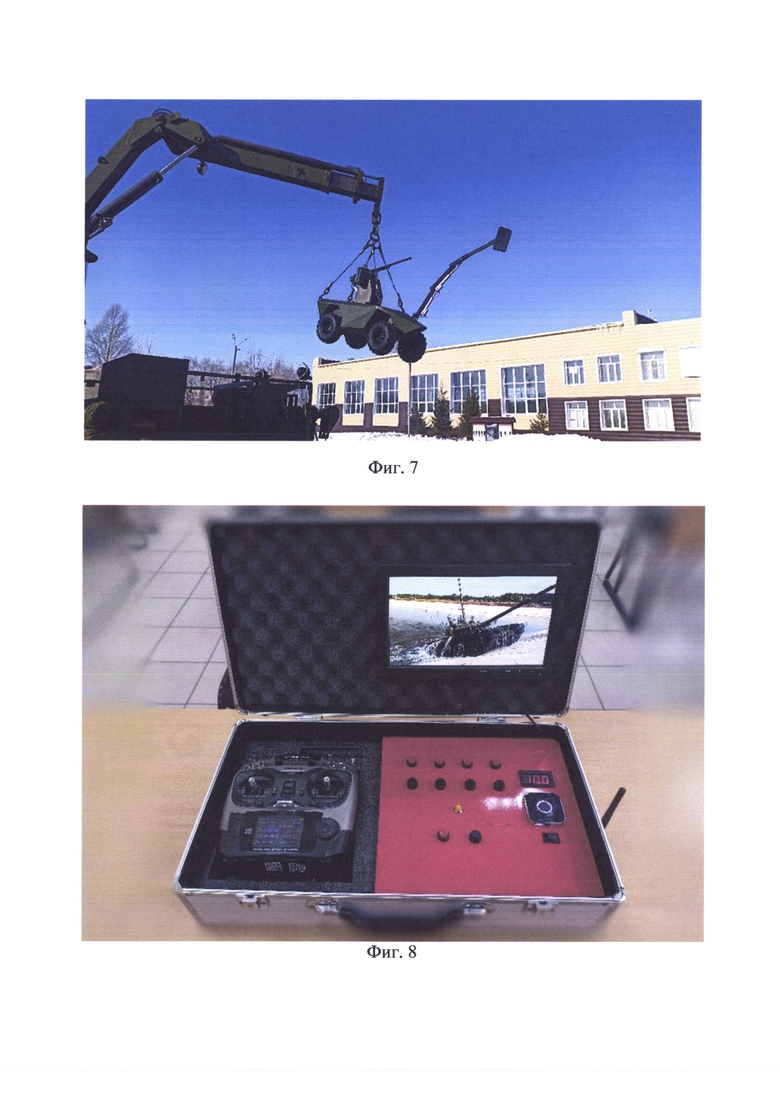
Сущность предлагаемого изобретения поясняется фиг. 1-9, на которых изображен РКТР в походном и транспортном положениях, схема его размещения на машине-носителе РЭМ-КЛ и фотографии физически изготовленного РКТР.
Предложенный патент на изобретение содержит: 1 - манипулятор; 2 - кевларовый корпус; 3 - пулемет ПКТ; 4 - прицельный комплекс; 5 - ВКУ (вращающееся контактное устройство); 6 - система постановки дымовых завес; 7 - БПЛА; 8 - устройство подзарядки БПЛА; 10 - РЫМ болты; 10 - бензиновый двигатель; 11 - передатчик местоположения; 12 - блок управления; 13 - бронеколпаки; 14 - система обнаружения мин; 15 - передние видеокамеры; 16 - ходовая часть с независимой подвеской и управляемыми передними колесами; 17 - задние видеокамеры; 18 - выдвижная платформа для перевозки и запуска БПЛА; 19 - сцепное устройство.
Заявленный РКТР работает следующим образом. Оператор с помощью БПЛА проводит рекогносцировку местности, в ходе которой определяет координаты местоположения вышедшего из строя образца вооружения военной и специальной техники и прокладывает безопасный маршрут для РКТР. После чего РКТР выдвигается в заданный район по проложенному с помощью БПЛА маршруту. При этом управление РКТР может осуществляться как дистанционно, с пульта оператора, так и автономно. Установленный на манипулятор (1) миноискатель (14) сканирует местность. Полученная с миноискателя (14) информация передается на пульт оператора (фиг. 8). Работающие видеокамеры (15, 17) передают видеоинформацию местоположения с привязкой координат местности на пульт дистанционного управления оператора (фиг. 8) и позволяют РКТР объезжать препятствия без участия оператора. Маневрирование РКТР выполняется с помощью управляемых передних колес независимой ходовой части (16). Для защиты РКТР, а также экипажа вышедшей из строя ВВСТ оператор может дистанционно применить установленный на станине пулемет (3) с прицельным комплексом и систему постановки дымовых завес (6) для маскировки. При необходимости оператор может использовать дистанционно управляемый манипулятор (1) для выполнения задач без участия личного состава. Взлет и посадка БПЛА может осуществляться как в автоматическом режиме так и дистанционно, зарядка батареи БПЛА осуществляется постоянно после его посадки на выдвижную платформу (18) в нише кевларового корпуса, путем соединения магнитных контактов расположенных на дне платформы и ножках БПЛА (на фиг. не показаны).
Таким образом, изобретение позволяет упростить конструкцию и повысить надежность РКТР, обеспечить возможность обнаружения мин и других взрывчатых устройств, реализовать дуплексную связь и подзарядку БПЛА, а также реализовать возможность автоматизированного распознавания препятствий.
| название | год | авторы | номер документа |
|---|---|---|---|
| РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС ТЕХНИЧЕСКОЙ РАЗВЕДКИ | 2023 |
|
RU2813930C2 |
| НАЗЕМНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС ТЕХНИЧЕСКОЙ РАЗВЕДКИ | 2023 |
|
RU2817074C1 |
| Роботизированный диагностический комплекс технической разведки | 2018 |
|
RU2709640C1 |
| БОЕВОЙ РОБОТИЗИРОВАННЫЙ МОБИЛЬНЫЙ КОМПЛЕКС | 2015 |
|
RU2584766C1 |
| Многофункциональный автономный роботизированный комплекс диагностики и контроля верхнего строения пути и элементов железнодорожной инфраструктуры | 2020 |
|
RU2733907C1 |
| БРОНИРОВАННЫЙ ПЛАВАЮЩИЙ МНОГОЦЕЛЕВОЙ КОМПЛЕКС | 2009 |
|
RU2422754C2 |
| Наземный роботизированный комплекс | 2023 |
|
RU2819223C1 |
| РОБОТОТЕХНИЧЕСКИЙ РАЗВЕДЫВАТЕЛЬНЫЙ КОМПЛЕКС АМФИБИЙНЫЙ | 2017 |
|
RU2654898C1 |
| Боевой модуль робототехнического комплекса с дистанционным наведением и ведением огня | 2024 |
|
RU2829896C1 |
| Разведывательно-огневой комплекс вооружения БМОП | 2016 |
|
RU2658517C2 |


Изобретение относится к самоходным транспортным средствам боевого применения, в частности, для разведки образцов вооружений и инженерной разведки местности, обеспечения ремонта, эвакуации раненного экипажа и других задач. Предлагаемый роботизированный комплекс технической разведки (РКТР) содержит легкобронированный кевларовый корпус, пульт дистанционного управления, пулемет, манипулятор, беспилотный летательный аппарат (БПЛА) и видеокамеры. Актуаторы линейного привода обеспечивают подвижность манипулятора, на котором установлены устройства для обнаружения мин и других боеприпасов. РКТР обеспечивает дуплексную связь с БПЛА и возможность подзарядки БПЛА. На комплекс установлена автоматизированная система распознавания препятствий. Технический результат состоит в упрощении конструкции РКТР и повышении его эффективности: надежности, автоматизации операций и многофункциональности. 9 ил.
Роботизированный комплекс технической разведки (РКТР), содержащий легкобронированный кевларовый корпус, пульт дистанционного управления, пулемет, манипулятор, беспилотный летательный аппарат (БПЛА) и видеокамеры, отличающийся тем, что подвижность манипулятора обеспечивается актуаторами линейного привода, при этом на манипулятор установлено устройство для обнаружения мин, а РКТР выполнен с возможностью реализации дуплексной связи с БПЛА.
| Роботизированный диагностический комплекс технической разведки | 2018 |
|
RU2709640C1 |
| МАНИПУЛЯТОР РОБОТА | 2015 |
|
RU2616317C1 |
| WO 2013182811 A1, 12.12.2013 | |||
| РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС РАЗМИНИРОВАНИЯ | 2015 |
|
RU2595097C1 |
| МОБИЛЬНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2007 |
|
RU2364500C2 |
| СПОСОБ УПРАВЛЕНИЯ СИЛОВОЙ УСТАНОВКОЙ ВЕРТОЛЕТА | 2010 |
|
RU2482024C2 |

